individualized structures in fluid power systems -...
TRANSCRIPT

9th FPNI PhD Symposium on Fluid Power, Florianopolis
Speaker:
October 28, 2016
Individualized Structures
in Fluid Power Systems
Prof. Dr. Jürgen Weber

Evolution of electro-mechanical drives
Introduction • Individualized displacement control • Individualized valve control • Outlook
Central belt transmission – Power transm. Distributed drives – Power & Information transm.
From belt transmissionto distributed drives / local intelligence /
integrated safety / high level of communication
Source: Lenze AutomationSource: LVR Industriemuseum Euskirchen
Slide 29th FPNI PhD Symposium on Fluid Power, Florianopolis-SC, BrazilOctober 26-28, 2016

Evolution of electro-hydraulic drives
Introduction • Individualized displacement control • Individualized valve control • Outlook
Upcoming individualized smart fluid power systems
Energy efficiency
Flexibility
Safety, Availability
Competitiveness
Individualization
Decentralized intelligence
Functional integration
to individual smart drives / local intelligence /
integrated safety / high level of communication
Source: Bosch Rexroth Source: Bosch Rexroth
Central hydraulics – Power transm.
From todays central hydraulics
Slide 39th FPNI PhD Symposium on Fluid Power, Florianopolis-SC, BrazilOctober 26-28, 2016

Individualized displacement control - levels
Common Motor
Common Pump
Common Motor
Individual Pumps
Individual Motors, const./variable
Individual Pumps, fixed/variable
Flexibility + costs
Introduction • Individualized displacement control • Individualized valve control • Outlook
Individualization levels of displacement control systems
• common motor-pump-unit
applications with strictly sequential working cycles (no parallel operation)
• common motor but individual variable displacement pumps for each actuator
beneficial with other efficient drive technologies, (power split transmissions)
recirculation possible / individual pressure levels
• individual motor-pump-unit for every single actuator –
highest level of individualization and flexibility
individual pressure and speed levels / high component effort
Slide 49th FPNI PhD Symposium on Fluid Power, Florianopolis-SC, BrazilOctober 26-28, 2016

Individualized displacement control – potentials
Potentials of individualized displacement controlled systems
Valve Ctrl. Pump Ctrl.
Energ
y
co
nsum
ptio
n
Eff
icie
ncy
Ind
ivid
uali
za
tio
nC
on
trol
Op
era
tion
Introduction • Individualized displacement control • Individualized valve control • Outlook
straight forward control,
less non-linearities,
local intelligence
load independent,
no consumer interaction
less cooling effort, lower noise,
load prediction, predictive
maintenance
power on demand,
energy recirculation
Slide 59th FPNI PhD Symposium on Fluid Power, Florianopolis-SC, BrazilOctober 26-28, 2016

Individualized displacement control – variety of architecture
Introduction • Individualized displacement control • Individualized valve control • Outlook
Structural variants of displacement controlled systems
Closed circuit Open circuit
Closed circuit Open circuit
Sta
tio
na
ry m
ac
hin
es
Mo
bile
mac
hin
es
• depending on application, cycle, potentials
• depending on energy source / domain
• depending on investment acceptance
Slide 69th FPNI PhD Symposium on Fluid Power, Florianopolis-SC, BrazilOctober 26-28, 2016

Introduction • Individualized displacement control • Individualized valve control • OutlookO
vera
ll effic
iency 74%
72%
100%
Ele
ctr
o-
mecha
nic
al
Ele
ctr
o-
hyd
raulic
Demonstrator with one-pump-circuit Structure variants and possible
solutions for compact drives
M
~
Single Rod Cylinder
1 Pump Unit 2 Pump Units 3 Pump Units
1 Drive 2 Drives 1 Drive
Op
en
Circu
itC
lose
d C
ircu
it
1 Pump Unit, 1 Drive
Without Switching ValvesWith Switch.
ValvesWithout Valves With Press. V.
Open C
ircuit
Clo
sed C
ircuit
• proof of static and dynamic performance
• similar good efficiency as commercially available
electromechanical compact drive
Results
Challenges
• thermo-energetic status
• passive cooling
• heat exchange
• operation cycle
• installed power
• fluid life time
Electrohydraulic compact drives
Slide 79th FPNI PhD Symposium on Fluid Power, Florianopolis-SC, BrazilOctober 26-28, 2016
Introduction • Individualized displacement control • Individualized valve control • Outlook
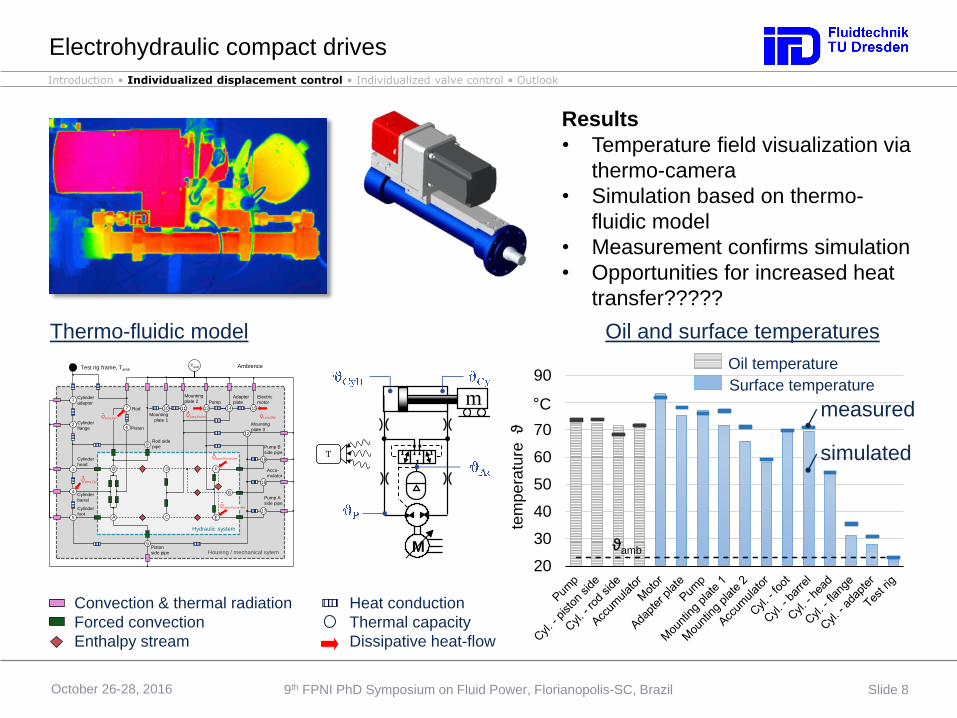
Results
• Temperature field visualization via
thermo-camera
• Simulation based on thermo-
fluidic model
• Measurement confirms simulation
• Opportunities for increased heat
transfer?????
2
3
4
A
G
13 14 15
6
D
C E5
B
8
7
9
10 11
F
12
16
17
18
TambTest rig frame, Tamb
Cylinder
flange
Cylinder
head
Cylinder
barrel
Cylinder
foot
Piston
side pipe
Piston
Rod side
pipe
Mounting
plate 1
Adapter
plate
Electric
motor
Accu-
mulator
Hydraulic system
Housing / mechanical sytem
Ambience
QLoss,Pu,vol+hm
QLoss,Pu,hm QLoss,Mot
QLoss,Cyl
Pump
Rod
Mounting
plate 2
Pump B
side pipe
Pump A
side pipe
QLoss,Cyl
Mounting
plate 3
1 Cylinder
adapter
QLoss,Pu,vol+hm
M
m
T
Oil and surface temperatures
20
30
40
50
60
70
80
90
tem
pe
ratu
re ϑ
ϑamb
C
simulated
measured
Thermo-fluidic model
Electrohydraulic compact drives
Oil temperature
Surface temperature
Convection & thermal radiation
Forced convection
Enthalpy stream
Heat conduction
Thermal capacity
Dissipative heat-flow
Slide 89th FPNI PhD Symposium on Fluid Power, Florianopolis-SC, BrazilOctober 26-28, 2016
Introduction • Individualized displacement control • Individualized valve control • Outlook
sa
h
20
30
40
50
60
70
80
90
tem
pe
ratu
re ϑ
ϑamb
C
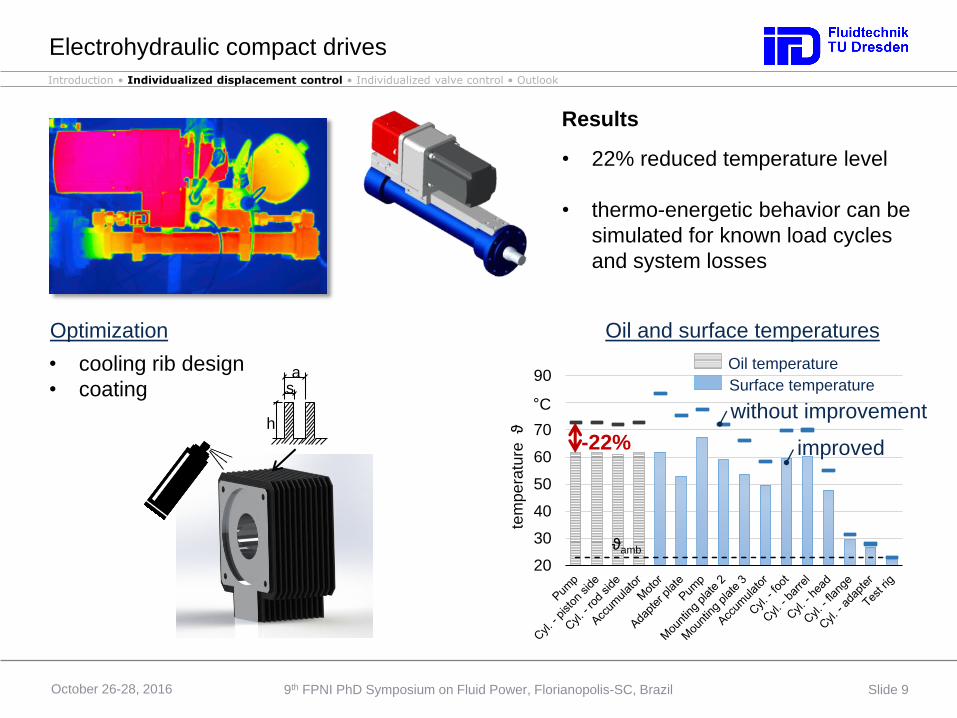
improved
without improvement
-22%
Results
Electrohydraulic compact drives
• 22% reduced temperature level
• thermo-energetic behavior can be
simulated for known load cycles
and system losses
Oil and surface temperaturesOptimization
Oil temperature
Surface temperature
Slide 99th FPNI PhD Symposium on Fluid Power, Florianopolis-SC, BrazilOctober 26-28, 2016
• cooling rib design
• coating

0
500
1000
1500
2000
0 1 2 3 4
Sp
ee
d [
rpm
]
Time [s]
Conven. MPC
Dynamic loss models of motor and pump
Introduction • Individualized displacement control • Individualized valve control • Outlook
Speed variable drive and variable pump control
• Decoupling of drive speed and volume flow control
• Additional degree of freedom
• Intelligent control strategy through model predictive optimization
MEnergy Efficiency Process Dynamics dtP tLoss,min
00 Vdt
dn
dt
dVn
dt
dQ
M
60
70
80
90
100
Energ
y [%
]
Energy Consumption
Conven. MPC
Avoid fast
acceleration
Minimum energy
consumption
Simultaneous use of both actuators
0
10
20
30
40
50
0 0,05 0,1 0,15 0,2
Flo
w [
l/m
in]
Time [s]
0
500
1000
1500
2000
0 0,05 0,1 0,15 0,2
Sp
ee
d [
rpm
]
Time [s]
Reduced
pump speed
Optimum flow
gradient
Model predictive optimization
Slide 109th FPNI PhD Symposium on Fluid Power, Florianopolis-SC, BrazilOctober 26-28, 2016

Introduction • Individualized displacement control • Individualized valve control • Outlook
Systems
Components
1D Network
Simulation
PU
p
U
T
U
Components
Measurement
10
y
zx
Component cooling
Lubrication
Coolant supply
Hydraulic
Systems
Source: GMN
Tem
pera
ture
26
20
[ C]
CFD
Simulation
System structure & control
Component geometry
& structure
Optimization
Dru
ck
Volumenstrom
∆𝑝
𝑉
METHODS
Thermo-energetic fluid-systems for machine tools
Slide 119th FPNI PhD Symposium on Fluid Power, Florianopolis-SC, BrazilOctober 26-28, 2016

Introduction • Individualized displacement control • Individualized valve control • Outlook
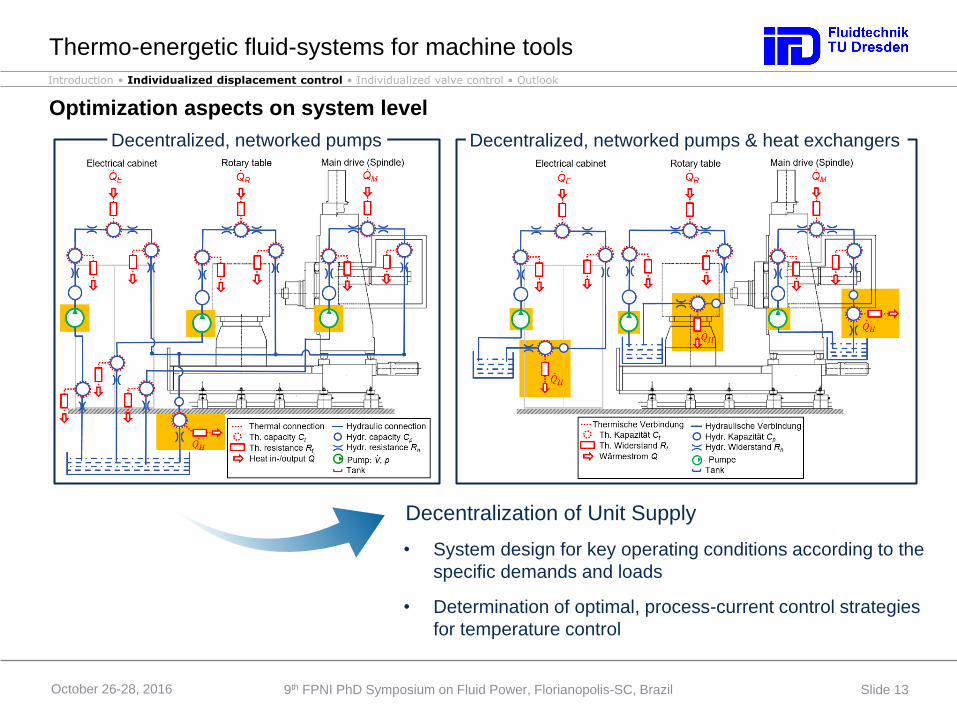
Optimization aspects on system level
Central Unit Supply
Thermo-energetic fluid-systems for machine tools
Slide 129th FPNI PhD Symposium on Fluid Power, Florianopolis-SC, BrazilOctober 26-28, 2016
Temperature development, simulation and measurement
Introduction • Individualized displacement control • Individualized valve control • Outlook
Decentralization of Unit Supply
Optimization aspects on system level
Decentralized, networked pumps Decentralized, networked pumps & heat exchangers
• System design for key operating conditions according to the
specific demands and loads
• Determination of optimal, process-current control strategies
for temperature control
Thermo-energetic fluid-systems for machine tools
Slide 139th FPNI PhD Symposium on Fluid Power, Florianopolis-SC, BrazilOctober 26-28, 2016

Introduction • Individualized displacement control • Individualized valve control • Outlook
500 1000 2500rpm0
500
1000
2000
Nm
500 1000 1500 U/min 25000
500
1000
Nm
2000
1500 0 10
20
40
60
80
100100
%
80
70
60
50
0 10
20
40
60
80
100
-20%
-10%
Hydrostatic
Hybrid
displacement
controlled attachment
power split
transmission
optimized
engine
maschine
control
Reference MachineGreen Wheel Loader Conventional Systems
System Architecture Example Engine Load Fuel Consumption
Potential for mobile machines
Slide 149th FPNI PhD Symposium on Fluid Power, Florianopolis-SC, BrazilOctober 26-28, 2016

Central control block
common metering edges
Central control block
independent metering edges
Decentralized valve groups
independent metering edges
Flexibility + CostDiversity of valve technology
Introduction • Individualized displacement control • Individualized valve control • Outlook
Individualization levels of independent metering control systems
• differentiation regarding type and arrangement of the used valve technology
• common metering edges – individual spool design only
• separate metering of in- and outflow of the hydraulic working ports
• topology of individual valve groups
opens up for differential modes of operation (several free flow paths)
Individualized valve control – individualization
Slide 159th FPNI PhD Symposium on Fluid Power, Florianopolis-SC, BrazilOctober 26-28, 2016

Introduction • Individualized displacement control • Individualized valve control • Outlook
Potentials of independent metering control systems
efficiency in the whole operation range choice of differential operation modes
more simple, less complex valve design
for multiple control targets
independent control of motion and pressure level
No cavitation at low loads and
low supply pressure!
Control of motion and pressure level
Valve characteristics
Ope
nin
g
𝐴/𝐴
max
0
1
10
𝑢/𝑢max
Command signal
𝑭
𝒙 𝒙Control
Normal mode Low pressure
regeneration
High pressure
regeneration
𝑥
𝐹 Δ𝑝in
Q, Δ𝑝out
𝑝L 𝑝0
No
cavitation!
𝑥Efficiency ratio
𝑝0 ⋅𝑄IM𝑄 4 3
1
1
-1
0.5
0
-1 -0.5 0 0.5 1
Spec. load force
-1
-0.5
0
0.5
1
-1
-0.5
0
0.5
1
Spec.
cylin
der
speed
Δ𝒑
𝑸
Individualized valve control - potentials
Slide 169th FPNI PhD Symposium on Fluid Power, Florianopolis-SC, BrazilOctober 26-28, 2016

Introduction • Individualized displacement control • Individualized valve control • Outlook
Variety of system and control architecture
• variety of application specific
component layout or
valve architecture
• system structure combined with
control/sensor architecture
Individualized valve control – variety of architectures
Slide 179th FPNI PhD Symposium on Fluid Power, Florianopolis-SC, BrazilOctober 26-28, 2016

Introduction • Individualized displacement control • Individualized valve control • Outlook
• variety of
closed loop strategies
• choosing the most
appropriate
application specific
strategy
Variety of system and control architecture
• variety of application specific
component layout or
valve architecture
• system structure combined with
control/sensor architecture
Individualized valve control – variety of architecture
Slide 189th FPNI PhD Symposium on Fluid Power, Florianopolis-SC, BrazilOctober 26-28, 2016

Introduction • Individualized displacement control • Individualized valve control • Outlook
Machine structure
𝑧𝑖
press
plunger (PP)
hold-down
clamp (HD)
counter holder
stamp (CH)
Primary &
secondary
calibration
0 1 2 3s
Time
0
100
-100
-200
mm
Tra
ve
l z
i
Cylin
der
po
sitio
n
press plunger
hold-down
counter holder
0 1 2 3s
Zeit
0
10
20
kJ
Zyklu
se
ne
rgie
0 1 2 3s
ZeitTime 𝑡
Supp
ly
en
erg
y
Op
tim
al
mo
de
s
Conventional 4/3-valves
Independent metering
PP
HD
CH
normal mode high pressure regeneration low pressure regenerationControl modes
Cycle and energy savings
-30
%
Cardboard packaging press – potentials
Slide 199th FPNI PhD Symposium on Fluid Power, Florianopolis-SC, BrazilOctober 26-28, 2016

Introduction • Individualized displacement control • Individualized valve control • Outlook
Machine structure
𝑝0 𝑝Τ
𝑥
𝐹
p0 = 160 bar
dK = 63 mm
dSt = 40 mmImage: MTS Systems
μm
20
0
-20
Lo
ad
fo
rce
kN
50
0
-50
mm
8
4
0
Supp
ly
en
erg
y kJ
F
xDes
Servo valve
Independent metering
-56
%
300
0
-300C
ontr
ol
err
or
Time
MIMO Flatness based trajectory
control strategy:
- Smooth mode switching
max. efficiency
+
+
Duty cycle and measurement results
with MIMO flatness based control
xMeas
Cylin
der
po
sitio
n
Material testing machine – potentials
Slide 209th FPNI PhD Symposium on Fluid Power, Florianopolis-SC, BrazilOctober 26-28, 2016

Introduction • Individualized displacement control • Individualized valve control • Outlook
ref.: HNF
ref.: w
ww
.fendt.com
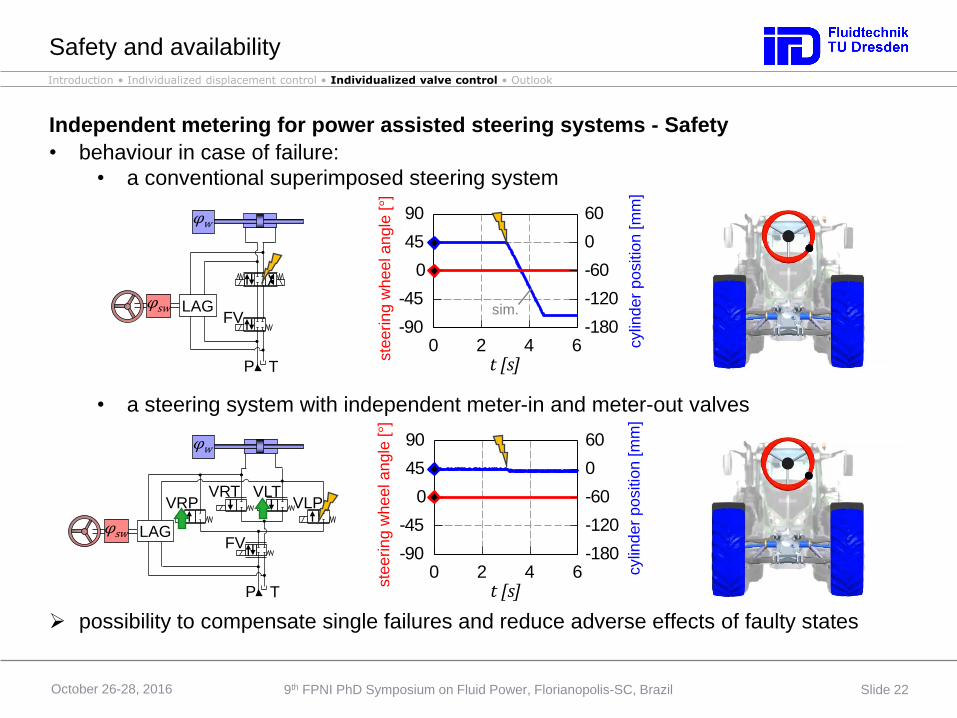
Independent metering for power assisted steering systems
• electrical drives offer very often integrated safety functions
• leads to an easy system integration for OEM
• benefits of IM structures in steering systems:
• driver assisted steering
• high safety level due to extended control intervention
pump
tank
steering unit
P
T
LAG
…
…
…
release valve
meter-in right
meter-out right
meter-out left
meter-in left
angle sensor
angle sensor
electr. control unit
FV
VRP
VRT
VLT
VLP
φsw
φw
ECU
…
…
…
…
…
…
…
…
P T
VRP VRT VLP
FV
VLT
LAG
φw
φsw
ECU
R/NR
Safety and availability
Slide 219th FPNI PhD Symposium on Fluid Power, Florianopolis-SC, BrazilOctober 26-28, 2016
0 2 4 6t [s]
0
60
-60
-120
-180
x cyl
[m
m]
0
45
90
-45
-90
φsw
[°]
Independent metering for power assisted steering systems - Safety
Introduction • Individualized displacement control • Individualized valve control • Outlook
0 2 4 6t [s]
0
60
-60
-120
-180
x cyl
[m
m]
0
45
90
-45
-90
φsw
[°]
P T
VRPVRT
VLP
FV
VLT
LAG
P T
FV
φw
φsw LAG
φw
φsw
sim.
• behaviour in case of failure:
• a conventional superimposed steering system
• a steering system with independent meter-in and meter-out valves
possibility to compensate single failures and reduce adverse effects of faulty statescylin
der
positio
n[m
m]
cylin
der
positio
n[m
m]
ste
ering
wheelangle
[°]
ste
ering
wheelangle
[°]
Safety and availability
Slide 229th FPNI PhD Symposium on Fluid Power, Florianopolis-SC, BrazilOctober 26-28, 2016

Introduction • Individualized displacement control • Individualized valve control • Outlook
Challenges in developing future pumps for individual displacement drives
Co
mp
on
en
t L
ife
tim
e No
ise &
Vib
ratio
n
rotational speed
maximum pressure
installation space & weight
costs
Po
we
r D
en
sit
ye
co
no
mic
eff
icie
ncy
Op
era
tion
higher acceleration/deceleration rate
load carrying capacity
part load efficiency
dynamic response time
thermal effects
intelligent controls
pressure pulsation
cavitation
damping
noise generation and transmission
predictive maintenance
application specific intervals
robustness & endurance
t
η
p
LW,A
n1
n2
n3
ηvol
n
η
Op
t.
n
real
Q
Outlook - challenges for displacement technology
Slide 239th FPNI PhD Symposium on Fluid Power, Florianopolis-SC, BrazilOctober 26-28, 2016

Po
we
r d
en
sit
ye
co
no
mic
eff
icie
ncy
Inte
lligen
ce
metering/control of flow and/or pressure
directional switching
integrated load check
integrated safety
Fu
ncti
on
al
ch
ara
cte
ris
tic
Va
lve
pro
pe
rties
dynamic, response time
damping, linearity
hysteresis
resolution
robustness
availability
inherent intelligence
sensor technology
actuator technology,
monitoring strategies
predictive maintenance
Introduction • Individualized displacement control • Individualized valve control • Outlook
y
A
Challenges and requirements in developing future valves
for individual independent metering architecture
maximum pressure
installation space & weight
costs
Outlook - challenges for valve technology
Slide 249th FPNI PhD Symposium on Fluid Power, Florianopolis-SC, BrazilOctober 26-28, 2016

Introduction • Individualized displacement control • Individualized valve control • Outlook
> 10Gbit/s < 1ms > 10k sens / cell < 10-8 outage<10-12 security
© MPI Saarbrücken
802.11ac/ad802.11n
802.11ag
802.11
802.11b
GPRS
HSPAHSDPA
LTE
3G R99 / EDGE
LTE Advanced
WiFi (10m)
100 Kb/s
1 Gb/s
100 Gb/s
10 Tb/s
1995 2000 2005 2010 2015 2020 2025 2030
10 Mb/s
Cellular
GSM
Throughput LatencySensing ResilienceSecurity Heterogenity
(b)(a)
(c) (d) (e) (f) (g) (h)
Development of wireless communication technologies
Outlook – communication and process control
Slide 259th FPNI PhD Symposium on Fluid Power, Florianopolis-SC, BrazilOctober 26-28, 2016

Introduction • Individualized displacement control • Individualized valve control • Outlook
Connected transport
Manufacturing 4.0
Precision farming
Construction 4.0
Source: Liebherr
Source:Claas
(*) jerryrushing.net/wp-content/uploads/2012/04/robotic_assembly_line1.jpg(**) www.chip.de/news/Alle-Informationen-zu-5G-Die-Mobilfunktechnik-der-Zukunft_77349445.html
Enabler for groundbreaking development in all fields of technology
(**)
(*)
Outlook – communication and process control
Slide 269th FPNI PhD Symposium on Fluid Power, Florianopolis-SC, BrazilOctober 26-28, 2016

Thank you for your attention!
Contact:
Professor Dr.-Ing. Jürgen Weber
Institute of Fluid Power
Helmholtzstraße 7a
01069 Dresden
Head:
Prof. Dr.-Ing. J. Weber
Sources:
(a) thumbs.dreamstime.com/z/g-g-g-icons-blue-grey-symbols-buttons-white-background-three-
dimensional-rendering-50191122.jpg
(b) www.funkschau.de/mobile-solutions/artikel/127744/
(c) www.digitaltrends.com/computing/best-internet-speed-tests/
(d) accuquest.com/why-accuquest/accunews/hearing-aid-technology/the-future-of-hearing-loss-therapy-
may-rely-on-high-resolution-images#prettyPhoto
(e) bernetblog.ch/wp-content/uploads/2008/04/stoppuhr.png
(f) www.grupohagakure.com.br/portfolio-view/monitoramento-de-cargas-e-valores/
(g) www.barrakuda.at/linkbuilding-die-externe-staerkung-ihrer-website/
(h) www.telegraph.co.uk/news/picturegalleries/howaboutthat/4863438/The-amazing-crayon-art-of-
Christian-Faur.html?image=10
9th FPNI PhD Symposium on Fluid Power, Florianopolis-SC, BrazilOctober 26-28, 2016