image acquisition and projective geometry
TRANSCRIPT

Ioannis Rekleitis
ImageAcquisitionand
ProjectiveGeometry

Review: Linear Algebra• MatrixAddition• MatrixMultiplicationA*B• Matrix-VectorMultiplicationA*v• MatrixTransposeAT,(AB)T=ATBT
• MatrixInverseA-1• IdentityMatrixI3=
CSCE-574 Robotics 2
1 0 00 1 00 0 1

Dot Product
CSCE 590: Introduction to Image Processing 3
f
v1
v2
V1V2= |V1|*|V2|*cos(f)

Cross Product
CSCE 590: Introduction to Image Processing 4
f
v1
v2
V1XV2= |V1|*|V2|*sin(f)*v
Review: Coordinate Systems and Orientation Representations
CSCE 590: Introduction to Image Processing 5
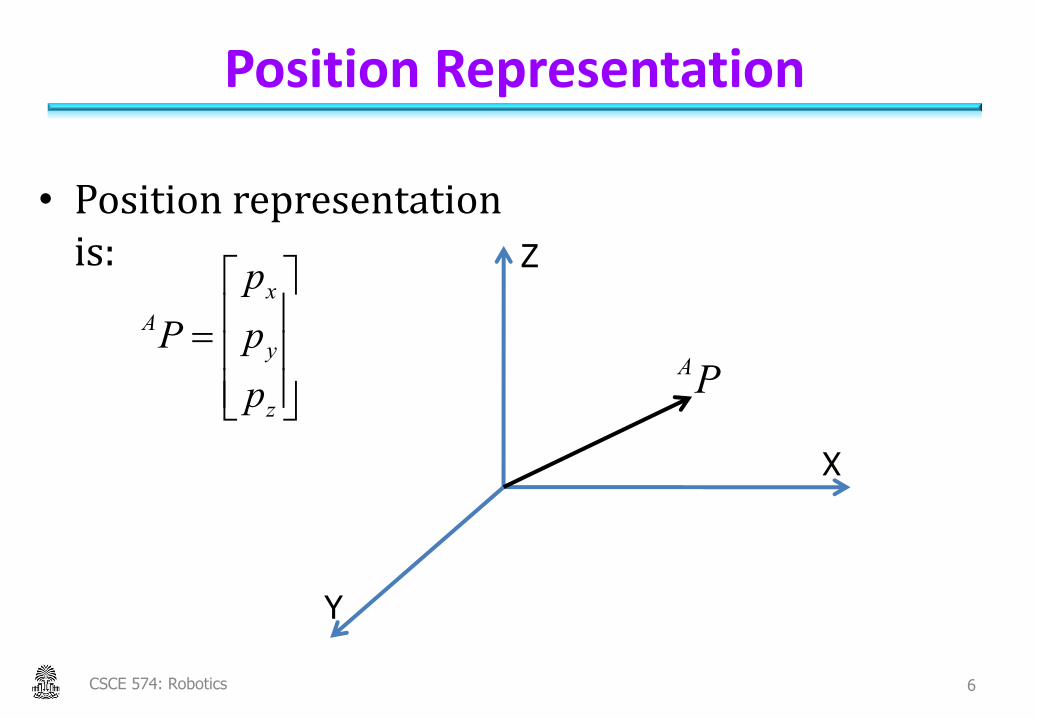
Position Representation
• Positionrepresentationis:
CSCE 574: Robotics 6
X
Y
Z
úúú
û
ù
êêê
ë
é=
z
y
xA
ppp
PPA

Orientation Representations
• Describestherotationofonecoordinatesystemwithrespecttoanother
CSCE 574: Robotics 7
XA
YA
ZA
XB
YB
ZB
A
B

Rotation Matrix• WritetheunitvectorsofB inthecoordinatesystemofA.
• RotationMatrix:
CSCE 574: Robotics 8
XA
YA
ZA
A
AXB
AYB
AZB
B[ ]
úúú
û
ù
êêê
ë
é
×××××××××
=
úúú
û
ù
êêê
ë
é==
ABABAB
ABABAB
ABABAB
BA
BA
BAA
B
ZZZYZXYZYYYXXZXYXX
rrrrrrrrr
ZYXR
ˆˆˆˆˆˆˆˆˆˆˆˆˆˆˆˆˆˆ
ˆˆˆ
333231
232221
131211

Properties of Rotation Matrix
CSCE 574: Robotics 9
TBA
BA
AB
AB
TAB
TAB
BA
RRRIRR
RR
==
=
=
-13

Coordinate System Transformation
CSCE 574: Robotics 10
úû
ùêë
é=
úúúú
û
ù
êêêê
ë
é
=´ 10
100013333231
232221
131211
TRprrrprrrprrr
Mz
y
x
whereR istherotationmatrixandT isthetranslationvector

Hierarchy of Transformations 2D
CSCE 590: Introduction to Image Processing 11
Transformation Matrix #DoF PreservesTranslation [I|t]2x3 2 orientationRigid [R|t]2x3 3 lengthsSimilarity [sR|t]2x3 4 anglesAffine [A]2x3 6 parallelismProjective [H]3x3 8 Straightlines
The above transformations apply to a vector x=[x,y,1]T

Hierarchy of Transformations 2D
CSCE 590: Introduction to Image Processing 12
Transformation Matrix T*x
Translation [I|t]2x3 x=x+txy=y+ty
Rigid [R|t]2x3 x=cos(f)x-sin(f)y+txy=sin(f)x+cos(f)y+ty
Similarity [sR|t]2x3 x=ax-by+txy=bx+ay+ty
Affine [A]2x3 A isarbitraryProjective [H]3x3 H is3by3

3D Transformations
CSCE 590: Introduction to Image Processing 13
Transformation Matrix #DoF PreservesTranslation [I|t]3x4 3 orientationRigid [R|t] 3x4 6 lengthsSimilarity [sR|t] 3x4 7 anglesAffine [A] 3x4 12 parallelismProjective [H]4x4 15 Straightlines
The above transformations apply to a vector x=[x,y,z,1]T

Rotation Matrix
• The rotation matrix consists of 9 variables, butthere are many constraints. The minimumnumber of variables needed to describe arotation is three.
CSCE 574: Robotics 14

Rotation Matrix-Single Axis
CSCE 574: Robotics 15
( ) ( ) ( )( ) ( )
( )( ) ( )
( ) ( )
( )( ) ( )( ) ( )
úúú
û
ù
êêê
ë
é -=
úúú
û
ù
êêê
ë
é
-=
úúú
û
ù
êêê
ë
é-=
1000cossin0sincos
cos0sin010
sin0cos
cossin0sincos0001
qqqq
q
qqq
qqqqq
z
y
x
R
R
R

Fixed Angles
• Onesimplemethodistoperformthreerotationsabouttheaxisoftheoriginalcoordinateframe:– X-Y-Zfixedangles
• Thereare12differentcombinations
CSCE 574: Robotics 16
( ) ( ) ( ) ( )( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( )( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( )
( ) ( ) ( ) ( ) ( ) úúú
û
ù
êêê
ë
é
-+++-
=
=
yqqffqyqfyqyqfyfyqyqfyqyqfyfy
qfyyfq
coscossincossinsincoscossinsincoscossinsinsincossinsinsincossincoscossinsinsincoscoscos
,, xyzAB RRRR

Inverse Problem
• FromaRotationmatrixfindthefixedanglerotations:
CSCE 574: Robotics 17
( )( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( )( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( )
( ) ( ) ( ) ( ) ( )
( )( )( ) ( )
( ) ( )÷øöç
èæ=
÷øöç
èæ=
+-=
úúú
û
ù
êêê
ë
é=
úúú
û
ù
êêê
ë
é
-+++-
Þ=
ffq
ffy
f
yqqffqyqfyqyqfyfyqyqfyqyqfyfy
yfq
cos,cos2tan
cos,cos2tan
,2tan
:thuscoscossincossin
sincoscossinsincoscossinsinsincossinsinsincossincoscossinsinsincoscoscos
,,
3332
1121
221
21131
333231
232221
131211
rrA
rrA
rrrA
rrrrrrrrr
RR AB
AB

Euler Angles
• ZYX:Startingwiththetwoframesaligned,firstrotateabouttheZB axis,thenbytheYB axisandthenbytheXB axis.TheresultsarethesameaswithusingXYZfixedanglerotation.
• Thereare12differentcombinationofEulerAnglerepresentations
CSCE 574: Robotics 18

Euler Angles
• TraditionallythethreeanglesalongtheaxisarecalledRoll,Pitch,andYaw
CSCE 574: Robotics 19
X
Y
Z

Euler Angles
• TraditionallythethreeanglesalongtheaxisarecalledRoll,Pitch,andYaw
Roll
CSCE 574: Robotics 20
X
Y
Z

Euler Angles
• TraditionallythethreeanglesalongtheaxisarecalledRoll,Pitch,andYaw
Pitch
CSCE 574: Robotics 21
X
Y
Z

Euler Angles
• TraditionallythethreeanglesalongtheaxisarecalledRoll,Pitch,andYaw
Yaw
CSCE 574: Robotics 22
X
Y
Z

Euler Angle concerns: Gimbal Lock
CSCE 574: Robotics 23
UsingtheZYZ convention•(90°,45°,−105°)≡(−270°,−315°,255°) multiplesof360°•(72°,0°,0°)≡(40°,0°,32°) singularalignment(Gimbal lock)• (45°,60°,−30°)≡(−135°,−60°,150°) bistable flip

Axis-Angle Representation
• Representanarbitraryrotationasacombinationofavectorandanangle
CSCE 574: Robotics 24
X
Y
Z
Vq

Quaternions• Aresimilartoaxis-anglerepresentation• Twoformulations– Classical– BasedonJPL’sstandardsW.G.Breckenridge,“Quaternions - ProposedStandardConventions,”JPL,Tech.Rep.INTEROFFICEMEMORANDUMIOM343-79-1199,1999.
• AvoidsGimbal lock
• Seealso:M.D.Shuster,“Asurveyofattituderepresentations,”JournaloftheAstronautical Sciences,vol.41,no.4,pp.439–517,Oct.–Dec.1993.
CSCE 574: Robotics 25

QuaternionsClassic notation JPL-based
CSCE 574: Robotics 26
kqjqiqqq 3214 +++=
jikkiikjjkkjiijkji
==-==-==--===
,,1222
jikkiikjjkkjiijijkkji
=-==-==-=-====
, ,1222
kqjqiqqq 3214 +++=
( )( )( )
( )2cos ,
2sin2sin2sin
, 44
q
q
q
q
=
úúúú
û
ù
êêêê
ë
é
=úû
ùêë
é= q
k
k
k
z
y
x
ë û´´Ä= qpq , , , ,1 Iqpqq
( )( ) ( )( ) ( )( ) ( )ú
úúú
û
ù
êêêê
ë
é
=úúú
û
ù
êêê
ë
é=
úúúú
û
ù
êêêê
ë
é
=
z
y
x
qqq
q
qqqq
q
bqbqbq
q
cos2sin
cos2sin
cos2sin
,2cos ,
3
2
1
0
3
2
1
0
Vect
orNo
tatio
n
See also: N. Trawny and S. I. Roumeliotis, “Indirect Kalman Filter for 3D Attitude Estimation,” University of Minnesota, Dept. of Comp. Sci. & Eng., Tech. Rep. 2005-002, March 2005.

Coordinate frames on PR2
CSCE 574: Robotics 27

Image Formation in the Eye
CSCE 590: Introduction to Image Processing 28
Image is upside down in the retina/imaging plane!
Adjust focus length• Camera • Human eye
Slides courtesy of Prof. Yan Tong
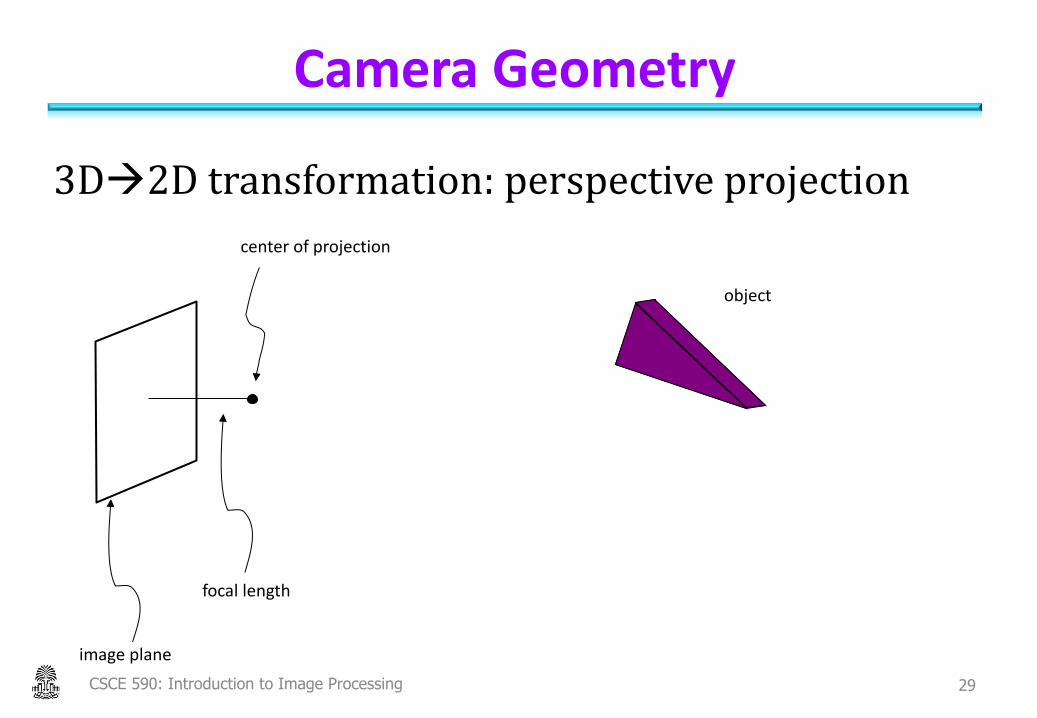
center of projection
focal length
object
image plane
Camera Geometry
3Dà2Dtransformation:perspectiveprojection
CSCE 590: Introduction to Image Processing 29

canonicalaxes
f
pixelcoordinates
opticalaxis
Addcoordinatesystemsinordertodescribefeaturepoints...
z
xy
uv
objectcoordinates
v(row)
u(col)
principalpoint
Z
x
y
attheC.O.P.
Coordinate Systems
CSCE 590: Introduction to Image Processing 30

f
pixelcoordinates
z
xy
uv
objectcoordinates
(X,Y,Z)incanonicalcoordinatessimagecan.coords:(x,y)
canonicalaxes
Coordinate Systems
CSCE 590: Introduction to Image Processing 31

x=f XZ y=
f YZ
a nonlinear transformation
f
pixelcoordinates
z
xy
uv
objectcoordinates
(X,Y,Z)incanonicalcoordsimagecan.coords:(x,y)
canonicalaxes
goal:torecoverinformationabout(X,Y,Z)from(x,y)
From 3d to 2d
CSCE 590: Introduction to Image Processing 32

Lens Parameters
CSCE 590: Introduction to Image Processing 33
Thin lens theory: •Increasing the distance from the object to the lens will reduce the size of image•Large focus length will give a small FOV
Image plane
P
p
OF
f
d
S1 S2
FOV
FOV
Slides courtesy of Prof. Yan Tong

Depth of Field & Out of Focus
CSCE 590: Introduction to Image Processing 34
http://www.azuswebworks.com/photography/dof.html
P
pO
F
P1 P2
p1
p2
Image plane
• DOF is inversely proportional to the focus length
• DOF is proportional to S1
Slides courtesy of Prof. Yan Tong

Camera Calibration
• CameraModel– [uv1]Pixelcoords– Worldcoords
• IntrinsicParameters– focallengthsinpixels– skewcoefficient– focalpoint
• ExtrinsicParameters– RotationandTranslation
CSCE 590: Introduction to Image Processing 35
[ ]úúúú
û
ù
êêêê
ë
é
=úúú
û
ù
êêê
ë
é
11 w
w
w
c zyx
TRAvu
z
[ ]Twww zyx 1
úúú
û
ù
êêê
ë
é=
1000
0
oy
x
vu
A agayyxx mfmf ×=×= aa ,
g
ovu ,0
[ ]TR

Camera Calibration
CSCE 590: Introduction to Image Processing 36
ExistingpackagesinMATLAB,OpenCV,etc

Rectified Image Sample
CSCE 590: Introduction to Image Processing 37
Unrectified Rectified
From Clearpath Husky Axis M1013 camera

Rectified Image Sample
CSCE 590: Introduction to Image Processing 38
Unrectified Rectified
From Parrot ARDrone 2.0 front camera

Rectified Image Sample
CSCE 590: Introduction to Image Processing 39
Unrectified Rectified
From GoPro HERO3+ at Barbados 2015 Field Trials

ReRectified Image Sample
CSCE 590: Introduction to Image Processing 40
Rectified ReRectified
From Aqua front camera at Barbados 2013 Field Trials