igm collaboration in engineering. - nrwinvest.com · continental europe (>6000) general...
TRANSCRIPT

IGM – RWTH Aachen University: Research and Collaboration in Engineering. Opportunities and Challenges in German‐Japanese Robotics!Department of Mechanism Theory and Dynamics of Machines, RWTH Aachen University
Prof. Dr. Ing. Dr. h. c. Burkhard Corves

IGM – RWTH Aachen University: Research and Collaboration in Engineering. Opportunities and Challenges in German‐Japanese Robotics | Burkhard CorvesDepartment of Mechanism Theory and Dynamics of Machines RWTH Aachen University
Germany
Where do we come from …
Slide 2 / 54
Aachen

IGM – RWTH Aachen University: Research and Collaboration in Engineering. Opportunities and Challenges in German‐Japanese Robotics | Burkhard CorvesDepartment of Mechanism Theory and Dynamics of Machines RWTH Aachen University
RWTH Aachen University: Facts & Figures
Slide 3 / 54

IGM – RWTH Aachen University: Research and Collaboration in Engineering. Opportunities and Challenges in German‐Japanese Robotics | Burkhard CorvesDepartment of Mechanism Theory and Dynamics of Machines RWTH Aachen University
RWTH Aachen University: Facts & Figures
Slide 4 / 54
ProfessorsStudents in Total
Graduates
New Enrolments
International Students Staff (Full‐Time Equivalent)
Total Budgetin Million €
44,517
8,556
10,819
7,184
540
9,264
9,053
900.0
Publications

IGM – RWTH Aachen University: Research and Collaboration in Engineering. Opportunities and Challenges in German‐Japanese Robotics | Burkhard CorvesDepartment of Mechanism Theory and Dynamics of Machines RWTH Aachen University
Students in Winter Term 2016/17
Slide 5 / 54
44,517 } 32% Female Students
} 68% Male Students
14,186
30,331
58% 23% 12% 7%

IGM – RWTH Aachen University: Research and Collaboration in Engineering. Opportunities and Challenges in German‐Japanese Robotics | Burkhard CorvesDepartment of Mechanism Theory and Dynamics of Machines RWTH Aachen University
International Students
Slide 6 / 54
• Students from 127 countries
• Most common countries of origin: China, India and Turkey
• Most common countries of origin related to the number of inhabitants: Luxembourg, Bulgaria, Belgium und Greece
• High amount of international students: 19.2 % in comparison to the average number ofstudents at German universities (10.9 %)
8,556 } 34% Female Students
} 66% Male Students
2,877
5,679

IGM – RWTH Aachen University: Research and Collaboration in Engineering. Opportunities and Challenges in German‐Japanese Robotics | Burkhard CorvesDepartment of Mechanism Theory and Dynamics of Machines RWTH Aachen University
Graduates 2016
Slide 7 / 54
7,184 }32% Female Graduates
} 68% Male Graduates
2,292
4,892
• One of four boards of directors of the 30 largest German corporations1 includes a graduate of RWTH Aachen University as a member.
• No other university has more graduates that are CEO of a DAX corporation.
• The nobelists Peter Debye and Thomas Südhof studied at RWTH Aachen University.
• The alumni network counts more than 16,000 members, to whom worldwide eventsare regularly offered.
1 DAX Companies in April 2017

IGM – RWTH Aachen University: Research and Collaboration in Engineering. Opportunities and Challenges in German‐Japanese Robotics | Burkhard CorvesDepartment of Mechanism Theory and Dynamics of Machines RWTH Aachen University
Doctoral Degrees 2016
Slide 8 / 54
893 } 33% Women
67% Men
298
595
227
74 69
565241
67180
127
Medicine Biology
MechanicalEngineering
Chemistry
ElectricalEngineering
Materials Science
PhysicsOther
Humanities andSocial Sciences
}

IGM – RWTH Aachen University: Research and Collaboration in Engineering. Opportunities and Challenges in German‐Japanese Robotics | Burkhard CorvesDepartment of Mechanism Theory and Dynamics of Machines RWTH Aachen University
Total Grants and Project Funds 2016
Slide 9 / 54
900.0million €
} Grants from the State of NRW
} Project Funds
481.3 million €
418.7 million €
OtherNRW Foundations
DFG (German Funding Agency)
European Union
Small, Medium & LargeIndustrial Partners
DedicatedTeaching Funds
Federal Ministry ofEducation and Researchand otherFederal Departments
million
€94.4
79.190.169.2
24.97.60.5
52.9

IGM – RWTH Aachen University: Research and Collaboration in Engineering. Opportunities and Challenges in German‐Japanese Robotics | Burkhard CorvesDepartment of Mechanism Theory and Dynamics of Machines RWTH Aachen University
Various companies – from SMEs to big corporations – can become actively involved in research topics
Slide 10 / 54
� One of Europe's biggest research landscapes is being built on more than 2.5 sqkm
� 800,000 sqm of space for 19 research clusters

IGM – RWTH Aachen University: Research and Collaboration in Engineering. Opportunities and Challenges in German‐Japanese Robotics | Burkhard CorvesDepartment of Mechanism Theory and Dynamics of Machines RWTH Aachen University
Science and industry under one roof
Slide 11 / 54
RWTH Aachen University …� … bundles a company's collaborative need with science through a
structured collaborative model. � … is mindful of the special demands of various companies, from start
ups to KMU to larger companies� … is always open to the creation of new collaboration packages that
are tailored to your company's needs.
Call for Proposals for joint R&D projects to develop� innovative products and applications in all technological and application areas� ready‐to‐market solutions for products, technology‐based services or methods which have strong
market potential
http://www.nedo.go.jp/koubo/AT091_100108.html

IGM – RWTH Aachen University: Research and Collaboration in Engineering. Opportunities and Challenges in German‐Japanese Robotics | Burkhard CorvesDepartment of Mechanism Theory and Dynamics of Machines RWTH Aachen University
Japan in NRW: Düsseldorf as Capital and Japanese Hub
• Düsseldorf� Distance from Aachen: 70 km� Major hub of Japanese companies (>500)� One of the largest Japanese communities incontinental Europe (>6000)
� General Consulate of Japan� Annual Japan Day since 2002
• Activities� German Japanese Society since 2004� Visit by Consul General Mr. Mizuuchi� 10th Anniversary of Keio Summer School in 2015� RWTH Alumni Association Japan since 2017
Slide 12 / 54

IGM – RWTH Aachen University: Research and Collaboration in Engineering. Opportunities and Challenges in German‐Japanese Robotics | Burkhard CorvesDepartment of Mechanism Theory and Dynamics of Machines RWTH Aachen University
Scholarships for Students Exchange: from Japan to Aachen
Slide 13 / 54
• RWTH Aachen University Exchange Scholarship
• For exchange stays ofBachelor and Master’s studentsof selected Japanese partner universitiesat RWTH Aachen University
9 Keio University9 Kyoto University9 Nagoya University9 Nara Institute of Science and Technology9 Osaka University9 The University of Tokyo9 Tohoku University9 Tokyo Institute of Technology
• Grant of 300 € per month

IGM – RWTH Aachen University: Research and Collaboration in Engineering. Opportunities and Challenges in German‐Japanese Robotics | Burkhard CorvesDepartment of Mechanism Theory and Dynamics of Machines RWTH Aachen University
Scholarships for Students and Academic Staff Exchange: from Aachen to Japan
Slide 14 / 54
• RWTH Aachen University Exchange Scholarship• MIRAI Scholarship for Japan
• For research projects ofMaster and PhD‐Studentsfrom RWTH Aachen Universityat selected partner universities
9 Keio University9 Kyoto University9 Nagoya University9 Nara Institute of Science and Technology9 Osaka University9 The University of Tokyo9 Tohoku University9 Tokyo Institute of Technology
• Grant of up to 3,000 €

IGM – RWTH Aachen University: Research and Collaboration in Engineering. Opportunities and Challenges in German‐Japanese Robotics | Burkhard CorvesDepartment of Mechanism Theory and Dynamics of Machines RWTH Aachen University
Scholarships for Students and Academic Staff Exchange: from Japan to Aachen
Slide 15 / 54
• RWTH Aachen University Exchange Scholarship• MIRAI Scholarship for Japan• Research Fellowship Japan
• For research projects ofMaster and PhD‐Studentsfrom selected Japanese partner universities
9 Keio University9 Kyoto University9 Nagoya University9 Nara Institute of Science and Technology9 Osaka University9 The University of Tokyo9 Tohoku University9 Tokyo Institute of Technology
• Grant of up to 3,000 €

IGM – RWTH Aachen University: Research and Collaboration in Engineering. Opportunities and Challenges in German‐Japanese Robotics | Burkhard CorvesDepartment of Mechanism Theory and Dynamics of Machines RWTH Aachen University
03/2015: Rector of RWTH Aachen University visited TITECH06/2015: Workshop between TITECH and RWTH Aachen/Lab visit at IGM/Discussion with Prof. Takeda09/2015: TITECH‐Students visit IGM‐Lab10/2015: Meeting with Prof. Takeda at IFToMM World Congress: Identification of potential collaborative research topics12/2015: Nomination of exchange student visiting TITECH in 06/201612/2015: Proposal for a long‐lasting collaboration with FANUC (starting in 04/2016)01/2017: Support for 2 years by the German Academic Exchange Service (DAAD) with funds from the Federal Foreign
Office (FFO) / program: PAJAKO – Partnerships between Japan and Korea
Objectives� Conduct world‐class, transformative research through
collaboration among Tokyo Tech, RWTH Aachen University and Industrial Company
� Provide young researchers and engineers with opportunities for international research projects
� Development of innovative products based on high‐level science and technology, especially in Mechanical Engineering
� Establish a long‐term collaboration
Collaborative Research in the course of PAJAKO: Key concept
Slide 16 / 54

IGM – RWTH Aachen University: Research and Collaboration in Engineering. Opportunities and Challenges in German‐Japanese Robotics | Burkhard CorvesDepartment of Mechanism Theory and Dynamics of Machines RWTH Aachen University
Development of a High‐Performance Delta Robot
Collaborative Research Project byMechanical Systems Design Laboratory, Tokyo Institute of Technology
Department of Mechanism Theory and Dynamics of Machines, RWTH Aachen UniversityFanuc Corporation
supported by the German Academic Exchange Service (DAAD) with funds from the Federal Foreign Office (FFO)
Japanese German Collaborative Research Project
Slide 17 / 54

IGM – RWTH Aachen University: Research and Collaboration in Engineering. Opportunities and Challenges in German‐Japanese Robotics | Burkhard CorvesDepartment of Mechanism Theory and Dynamics of Machines RWTH Aachen University
PAJAKO – Partnerships between Japan and Korea
Slide 18 / 54
Aims� to strengthen existing partnerships and initiate new bilateral partnerships between Germany and Japan in order
to facilitate� joint collaborative research projects� exchange of students, PhD‐Students, professors, etc.
� financial support for up to 2 years (starting from 01/2017)
� mobility costs (travel and living allowances) are fully covered
� sponsored by

IGM – RWTH Aachen University: Research and Collaboration in Engineering. Opportunities and Challenges in German‐Japanese Robotics | Burkhard CorvesDepartment of Mechanism Theory and Dynamics of Machines RWTH Aachen University
Serial Parallel and Fully Parallel Delta‐Like Robots
Slide 19 / 54
Fully parallel Delta‐like robots
Xin‐Jun LiuX4
adeptQuattro
Autonox 24 RL5‐750
FANUC M‐3iA
FANUC M‐2iA
FANUC M‐1iA
ABB IRB 360
Kawasaki YF03N
Serial parallel Delta‐like robots
CodianD5
YaskawaMPP3H
OmronX‐Delta
Industrial and academic modifications of Delta‐like robots impose high challenges on the dimensional synthesis

IGM – RWTH Aachen University: Research and Collaboration in Engineering. Opportunities and Challenges in German‐Japanese Robotics | Burkhard CorvesDepartment of Mechanism Theory and Dynamics of Machines RWTH Aachen University
Dynamic Models Need to be Highly Efficient to Meet the Industrial Requirements
Slide 20 / 54
4 dof
5 dof6 dof
Autonox 24 RL5‐750
FANUC M‐3iA
FANUC M‐2iA
FANUC M‐1iA
ABB IRB 360
• Current designs of Delta robots offer increased functionality, efficiency and flexibility, e.g.:� dof↑, workspace↑, payload↑, speed↑, accuracy↑, hygiene requirements↑
• Design changes place higher demands on the dynamic modeling
• Design optimization/dimensional synthesesare performed combining these dynamic modelswith effective kinematic indices
Joint collaborative research projects

IGM – RWTH Aachen University: Research and Collaboration in Engineering. Opportunities and Challenges in German‐Japanese Robotics | Burkhard CorvesDepartment of Mechanism Theory and Dynamics of Machines RWTH Aachen University
IGM: Department of Mechanism Theory and Dynamics of Machines
Slide 21 / 54
• Staff:� 2 Professors� 19 Research assistants� 5 Visiting scientists� 7 Non teaching staff� 45 Student research assistants
• Lectures:� Electromechanical Motion Technology� Mechanism Design� Machine Design� Kinematics, Dynamics and Application in Robotics
� Fundamentals of Machine and Structural Dynamics
� Advances Dynamics of Machines� Multi Body Dynamics� Machine elements� Vibration and Stress Measurement
• Students:� ca. 2000
• Overall turnover:� ca. 1 Mio €

IGM – RWTH Aachen University: Research and Collaboration in Engineering. Opportunities and Challenges in German‐Japanese Robotics | Burkhard CorvesDepartment of Mechanism Theory and Dynamics of Machines RWTH Aachen University
Structural & Dimensional Synthesis of Mechanisms
Mechanism analysis, optimisation and tolerancemanagement
Mechanism development and design
Development of tailored Software tools
…
IGM
Mechanism Theoryand Kinematics Dynamics Robotics
Research Fields
Slide 22 / 54

IGM – RWTH Aachen University: Research and Collaboration in Engineering. Opportunities and Challenges in German‐Japanese Robotics | Burkhard CorvesDepartment of Mechanism Theory and Dynamics of Machines RWTH Aachen University
Mock Heart: Development of a contractive Mock Heart
Slide 23 / 54
ChallengePressure, flow rate and flow properties of blood in the human heart can not be simulated properly as required for the development of ventricular assist devices.AimDevelopment of a test bench to actuate an artificial ventricle with native geometry through dedicated motion functions.
Methodology• Identification and evaluation of suitable
kinematic structures• Dimensional synthesis• Design of cam mechanisms

IGM – RWTH Aachen University: Research and Collaboration in Engineering. Opportunities and Challenges in German‐Japanese Robotics | Burkhard CorvesDepartment of Mechanism Theory and Dynamics of Machines RWTH Aachen University
Mock Heart: Native Geometry and Motion
Slide 24 / 54
Vizualization
speckle tracking echocardiography‐procedure

IGM – RWTH Aachen University: Research and Collaboration in Engineering. Opportunities and Challenges in German‐Japanese Robotics | Burkhard CorvesDepartment of Mechanism Theory and Dynamics of Machines RWTH Aachen University
Mock Heart: Motion in the mid‐plane
Slide 25 / 54
• End‐systolic volume• End‐diastolic volume• Inner ventricular wall

IGM – RWTH Aachen University: Research and Collaboration in Engineering. Opportunities and Challenges in German‐Japanese Robotics | Burkhard CorvesDepartment of Mechanism Theory and Dynamics of Machines RWTH Aachen University
Mock Heart: Structural and dimensional synthesis
Slide 26 / 54
Cam mechanism• Accurate realisation of transfer functions• Synchronized input motion• 3-D printed cam disks
r i,E2[m
m]
φ [rad]

IGM – RWTH Aachen University: Research and Collaboration in Engineering. Opportunities and Challenges in German‐Japanese Robotics | Burkhard CorvesDepartment of Mechanism Theory and Dynamics of Machines RWTH Aachen University
MockHeart: Prototype with 3‐D Printed Cam EDisks and Contractive Ventricle
Slide 27 / 54
• The

IGM – RWTH Aachen University: Research and Collaboration in Engineering. Opportunities and Challenges in German‐Japanese Robotics | Burkhard CorvesDepartment of Mechanism Theory and Dynamics of Machines RWTH Aachen University
Modelling and simulation of dynamic systems
Dimensioning and optimizing of dynamic systems
Rotor dynamics
Mass‐ and power‐balacing
…
IGM
Mechanism Theoryand Kinematics Dynamics Robotics
Research Fields
Slide 28 / 54

IGM – RWTH Aachen University: Research and Collaboration in Engineering. Opportunities and Challenges in German‐Japanese Robotics | Burkhard CorvesDepartment of Mechanism Theory and Dynamics of Machines RWTH Aachen University
Self balancing Shaker
Slide 29 / 54
MotivationUnbalanced forces cause undesired vibrations in orbital shakers and thus limit the operating speed
AimDevelopment of a mechanism able to balance the forces autonomously
IGM – RWTH Aachen University: Research and Collaboration in Engineering. Opportunities and Challenges in German‐Japanese Robotics | Burkhard CorvesDepartment of Mechanism Theory and Dynamics of Machines RWTH Aachen University
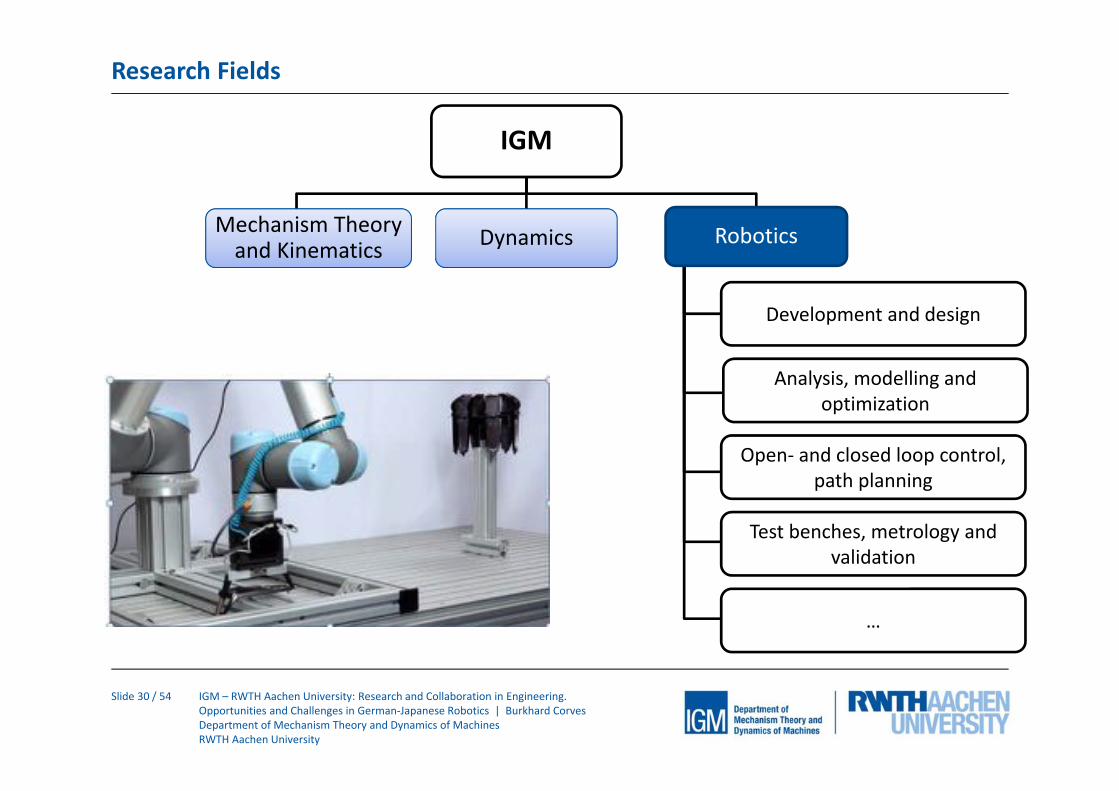
Development and design
Analysis, modelling andoptimization
Open‐ and closed loop control, path planning
Test benches, metrology and validation
…
IGM
Mechanism Theoryand Kinematics Dynamics Robotics
Research Fields
Slide 30 / 54

IGM – RWTH Aachen University: Research and Collaboration in Engineering. Opportunities and Challenges in German‐Japanese Robotics | Burkhard CorvesDepartment of Mechanism Theory and Dynamics of Machines RWTH Aachen University
Robotic Device: Haptic Scenarios with different use cases
Slide 31 / 54
configurable anar age – aptic eedback ystem► Various use cases
possible
► Just a change of the simulation model
► Immediate comparison of different variants
► Change of structure as well as change of parameters (e.g. lengths or masses)
► No workshop for prototyping needed

IGM – RWTH Aachen University: Research and Collaboration in Engineering. Opportunities and Challenges in German‐Japanese Robotics | Burkhard CorvesDepartment of Mechanism Theory and Dynamics of Machines RWTH Aachen University
Multi‐disciplinary project approach
Slide 32 / 54

IGM – RWTH Aachen University: Research and Collaboration in Engineering. Opportunities and Challenges in German‐Japanese Robotics | Burkhard CorvesDepartment of Mechanism Theory and Dynamics of Machines RWTH Aachen University
Haptic Display and Visualization of a Simulated Cupboard‐Door‐Kinematic
Slide 33 / 54

IGM – RWTH Aachen University: Research and Collaboration in Engineering. Opportunities and Challenges in German‐Japanese Robotics | Burkhard CorvesDepartment of Mechanism Theory and Dynamics of Machines RWTH Aachen University
Development of a Micro‐Manipulator: MicMaC (Micro‐Manipulator‐Cube)
Slide 34 / 54
Definition:A micro‐manipulator is a high‐precisionparallel‐kinematic robot with a work spacein the millimeter range but withmacroskopic overall dimensions
• dimensions : 180 x 180 x 180 mm³
• workspace : 4 x 4 x 4mm³
• PR1PR1 ‐ configuration
• encoder resolution : 0.1 µm

IGM – RWTH Aachen University: Research and Collaboration in Engineering. Opportunities and Challenges in German‐Japanese Robotics | Burkhard CorvesDepartment of Mechanism Theory and Dynamics of Machines RWTH Aachen University
Fatigue Analysis of Compliant Joints
Slide 35 / 54
MotivationExperimental studies on the fatigue of compliant joints are currently missing in research activities
AimFatigue analysis of flexure hinges by taking into account all technical aspects of material properties, design and manufacturing of flexure hinges
Methodology and Results• the parameter of the manufacturing process
are changed to achieve different surface layer (examination of microstructure)
• changes in technology as a whole were rather minor (nine trim cuts have been performed on each test specimens)
• all chosen parameter combinations generally achieve good surface quality
• results show that the chosen manufacturing technology influences the durability of the notch hinges
15 mm
10 mm
30 mm
40 µm
40 µm
xSD = 300 nm; DSD = 0°
3°
wire eroding machine

IGM – RWTH Aachen University: Research and Collaboration in Engineering. Opportunities and Challenges in German‐Japanese Robotics | Burkhard CorvesDepartment of Mechanism Theory and Dynamics of Machines RWTH Aachen University
Compliant Mechanisms
Slide 36 / 54

IGM – RWTH Aachen University: Research and Collaboration in Engineering. Opportunities and Challenges in German‐Japanese Robotics | Burkhard CorvesDepartment of Mechanism Theory and Dynamics of Machines RWTH Aachen University
0 500 1000 1500 20000
20
40
60
80
100
120
X [mm]
Z [m
m]Initial approach: planar five‐bar linkage
• What are the optimal springs?
• What is the optimal trajectory?
• How to control the system?
Pick and Place Operations
Slide 37 / 54
Motivation
• frequency of pick & place approx. 9000 picks/hour
• expected service life: 12 – 15 years
• In general only small variations in the pick and place positions
• 20% of EU´s energy consumption is accounted for by industry
Could the use of springs increase the energy efficiency?
T2(t)T1(t)
Springs

IGM – RWTH Aachen University: Research and Collaboration in Engineering. Opportunities and Challenges in German‐Japanese Robotics | Burkhard CorvesDepartment of Mechanism Theory and Dynamics of Machines RWTH Aachen University
Preliminary Results
Slide 38 / 54
Energy
4.7
1.81.2
‐62% ‐75%1: no Springs
2: Springs a=0
3: Springs a≠0
Characteristics for the optimization
0.6 0.4 0.81 1.3 ∆ 1.7
0.60.8 0.60.8 500
Task

IGM – RWTH Aachen University: Research and Collaboration in Engineering. Opportunities and Challenges in German‐Japanese Robotics | Burkhard CorvesDepartment of Mechanism Theory and Dynamics of Machines RWTH Aachen University
Regional structure
End‐effector
Gripper
Demonstrator partExternal sensor system
Onboard sensor system
Development of Mechanisms for Multi‐Axial Draping of Preforms
Slide 39 / 54
Methodology• Drape simulations provide drape trajectories• Selection of suitable planar mechanisms
to fulfill draping motions• Dimensional synthesis/multicriteria optimization
and evaluation of possible structures
Initial geometry:planar
Final geometry:multiaxial
Grippingpoints
MotivationUse of carbon fibre enforced partsnot yet widespread in mass productionAimAutomation of the handling and draping process • for objects with varying multiaxial geometries• with online detection of defects and direct
intervention• with online data reconciliation

IGM – RWTH Aachen University: Research and Collaboration in Engineering. Opportunities and Challenges in German‐Japanese Robotics | Burkhard CorvesDepartment of Mechanism Theory and Dynamics of Machines RWTH Aachen University
Design requirements
Slide 40 / 54
• Multiaxial complex shape (varying edges & curves of different radii)• Single layer, biaxial carbon fibre (size of about 800x800 mm²)• Constant orientation of the grippers with its contact area parallel to the x-y-plane• Loads are less than 15 N and predominantly imposed parallel to the plane of motion• Seven gripper arms are required to perform the drape motion• Mechanisms with purely planar output motion are sufficient

IGM – RWTH Aachen University: Research and Collaboration in Engineering. Opportunities and Challenges in German‐Japanese Robotics | Burkhard CorvesDepartment of Mechanism Theory and Dynamics of Machines RWTH Aachen University
Endeffector
Slide 41 / 54

IGM – RWTH Aachen University: Research and Collaboration in Engineering. Opportunities and Challenges in German‐Japanese Robotics | Burkhard CorvesDepartment of Mechanism Theory and Dynamics of Machines RWTH Aachen University
Bots2ReC: Robots to Re‐Construction
Slide 42 / 54
• Developing a Robotic System for Asbestos Removal
� launched in 02/2016 as a H2020 Innovation Action
� clearance and refurbishment of rehabilitation sites
� asbestos removal in hazardous environments
� tremendous market potential
� simplified environment allows semi‐autonomous operation
� removal tasks with high repetitionand low complexity
� adapted design and technology
[http://www.bots2rec.eu]

IGM – RWTH Aachen University: Research and Collaboration in Engineering. Opportunities and Challenges in German‐Japanese Robotics | Burkhard CorvesDepartment of Mechanism Theory and Dynamics of Machines RWTH Aachen University
Bots2ReC: Robots to Re‐Construction
Slide 43 / 54
• International Consortium of seven Partners
[http://www.bots2rec.eu]
� launched in 02/2016 as a H2020 Innovation Action
� clearance and refurbishment of rehabilitation sites
� asbestos removal in hazardous environments
� tremendous market potential
� simplified environment allows semi‐autonomous operation
� removal tasks with high repetitionand low complexity
� adapted design and technology

IGM – RWTH Aachen University: Research and Collaboration in Engineering. Opportunities and Challenges in German‐Japanese Robotics | Burkhard CorvesDepartment of Mechanism Theory and Dynamics of Machines RWTH Aachen University
Bots2ReC: Geometric and Task‐Specific Boundary Conditions
Slide 44 / 54
� limited mass of 300g due to maximum allowed load on the floor
� small 0.6x0.8m footprint and compact folding for narrow corridors
� differential drive and OmniWheelsfor easy maneuverability andfragile floor seclusion
� specific kinematics for reachability of floor & ceiling
� situation prediction to adapt footprint
� adaptive stabilization to account for processing forces and the small support polygon
mobility
perception
collaboration
9

IGM – RWTH Aachen University: Research and Collaboration in Engineering. Opportunities and Challenges in German‐Japanese Robotics | Burkhard CorvesDepartment of Mechanism Theory and Dynamics of Machines RWTH Aachen University
Bots2ReC: Collaboration of Operator and Mobile Robotic Units
Slide 45 / 54
� user input for task allocation via semantic mapping
� asbestos identification
� task definition and parameter specification
� process supervision
� collaboration of robotic units in a shared workspace
� autonomous task planning and sharing
� collision avoidance and trajectory generation
mobility
perception
collaboration
9
9

IGM – RWTH Aachen University: Research and Collaboration in Engineering. Opportunities and Challenges in German‐Japanese Robotics | Burkhard CorvesDepartment of Mechanism Theory and Dynamics of Machines RWTH Aachen University
Bots2ReC: Navigation and Process Surveilance
Slide 46 / 54
� low visibility and dust in changing environments
� local process monitoring using 1‐D radar technology
� Self‐Localization and Mapping using sensor data fusion for laser, radar and camera data
� context dependency of information
� significance and confidence of data
� weighting factors and decision logics
mobility
perception
collaboration
9
9
9

IGM – RWTH Aachen University: Research and Collaboration in Engineering. Opportunities and Challenges in German‐Japanese Robotics | Burkhard CorvesDepartment of Mechanism Theory and Dynamics of Machines RWTH Aachen University
Bots2ReC: Robots to Re‐Construction
Slide 47 / 54

IGM – RWTH Aachen University: Research and Collaboration in Engineering. Opportunities and Challenges in German‐Japanese Robotics | Burkhard CorvesDepartment of Mechanism Theory and Dynamics of Machines RWTH Aachen University
PARAGRIP – Reconfigurable, object integrative manipulation
Slide 48 / 54
Motivation
Integrating the object into the parallel‐kinematicstructure, objects can be manipulated jigless.
Aim
Development of a modular, reconfigurablesystem for object‐integrative manipulation.
Results
� New concept for reconfigurable, object‐integrative handling
� Self‐optimizing configuration planning(grasp‐ and base‐points, re‐grasping)
� Validation of the concept with a prototype
Methodology
� Structural and dimensional Synthesis
� Path‐ and reconfiguration planning
� Modeling and simulation
� Systematic Enhancement of existing modules

IGM – RWTH Aachen University: Research and Collaboration in Engineering. Opportunities and Challenges in German‐Japanese Robotics | Burkhard CorvesDepartment of Mechanism Theory and Dynamics of Machines RWTH Aachen University
PARAGRIP – Prototype
Slide 49 / 54

IGM – RWTH Aachen University: Research and Collaboration in Engineering. Opportunities and Challenges in German‐Japanese Robotics | Burkhard CorvesDepartment of Mechanism Theory and Dynamics of Machines RWTH Aachen University
PARAGRIP vertasile and self‐optimizing modular system
Slide 50 / 54
Compatibility: Integration of external handlingand measurement units
Mobility: Transportable frame with exchangeableand displaceable arm units
Modularity: Consistent modular concept
Scalability: Arbitrary expandable and quantitatively scalable
Universality: Flexible adaption to various handling scenarios

IGM – RWTH Aachen University: Research and Collaboration in Engineering. Opportunities and Challenges in German‐Japanese Robotics | Burkhard CorvesDepartment of Mechanism Theory and Dynamics of Machines RWTH Aachen University
PARAGRIP vertasile assembly of large scale components
Slide 51 / 54
… Heavy load handling
… as flexible jig

IGM – RWTH Aachen University: Research and Collaboration in Engineering. Opportunities and Challenges in German‐Japanese Robotics | Burkhard CorvesDepartment of Mechanism Theory and Dynamics of Machines RWTH Aachen University
Active Shaping and assembly of flexible objects
Slide 52 / 54
Research hypothesis
Tolerances in flexible objects can becompensated by shaping the structurewith a jiggles multi‐arm robot system.
Aim
Implementation of a demonstration handlingprocess of a flexible shell.
Results
� Algorithm for automated path‐planning using Abaqus
� Simple Black Box model for the modelling of the shell behavior
� Analysis tool for the performance of the Black‐Box model
Methodology
� FEM simulation of the shell behaviors usingchanging connection conditions during grasping
� Combinatorial investigation of possibledeformation procedures
� Simulative path‐planning, considering actingforces and stresses (quasi static analysis)
� Analytical calculation of the shell deformation

IGM – RWTH Aachen University: Research and Collaboration in Engineering. Opportunities and Challenges in German‐Japanese Robotics | Burkhard CorvesDepartment of Mechanism Theory and Dynamics of Machines RWTH Aachen University
Active Shaping and assembly of flexible objects
Slide 53 / 54
Simulation model Reality Test

Thank you for your attention
www.igm.rwth‐aachen.de
Contact:Department of Mechanism Theory and Dynamics of Machines RWTH Aachen UniversityKackertstraße 16‐1852072 Aachen(+49)‐241 80‐95546 [email protected]‐aachen.de
Prof. Dr.‐Ing. Dr. h. c.
Burkhard CorvesDirector
Telephone: (+49)‐241 80‐[email protected]‐aachen.de