ieee transactions on image processing 1 …ybchen/tip2017watermark.pdf · ieee proof ieee...
TRANSCRIPT

IEEE P
roof
IEEE TRANSACTIONS ON IMAGE PROCESSING 1
Robust Multi-Focus Image Fusion UsingEdge Model and Multi-Matting
Yibo Chen , Member, IEEE, Jingwei Guan , Member, IEEE, and Wai-Kuen Cham, Senior Member, IEEE
Abstract— An effective multi-focus image fusion method is1
proposed to generate an all-in-focus image with all objects in2
focus by merging multiple images. The proposed method first3
estimates focus maps using a novel combination of edge model4
and a traditional block-based focus measure. Then, a propagation5
process is conducted to obtain accurate weight maps based on a6
novel multi-matting model that makes full use of the spatial infor-7
mation. The fused all-in-focus image is finally generated based8
on a weighted-sum strategy. Experimental results demonstrate9
that the proposed method has state-of-the-art performance for10
multi-focus image fusion under various situations encountered in11
practice, even in cases with obvious misregistration.12
Index Terms— Multi-focus, fusion, edge model, multi-matting.13
I. INTRODUCTION14
MULTI-FOCUS image fusion is an important technique15
to tackle the defocus problem that some parts of the16
image are out of focus and look blurry. This problem usually17
happens when a low depth-of-field optical system is used18
to capture an image, such as microscopes or large aperture19
cameras. Through multi-focus image fusion, several images20
of the same scene but with different focus settings can be21
combined into a so-called all-in-focus image, in which all22
parts are fully focused. A good multi-focus image fusion23
method should meet the requirements that all information24
of the focused regions in each source image is preserved25
in the fused image with little artifacts, and the method is26
robust to imperfect situations such as existence of noise and27
misregistration.28
During the last decade, a large number of multi-focus image29
fusion methods have been proposed. Most of them can be30
categorized into four major groups [1]. The first group consists31
of methods based on multi-scale decomposition [2], such as32
pyramid [3], wavelet decomposition [4], [5], curvelet trans-33
form [6], shearlet transform [7], non-subsampled contourlet34
transform (NSCT) [8], [9] and neighbor distance (ND) [10].35
Recently guided filter was also introduced to refine the multi-36
scale representations and the method achieves state-of-the-37
art performance [11]. The second group consists of sparse38
Manuscript received January 10, 2017; revised June 29, 2017; acceptedNovember 20, 2017. The associate editor coordinating the review of thismanuscript and approving it for publication was Prof. Gene Cheung.(Corresponding author: Yibo Chen.)
The authors are with the Department of Electrical Engineering, The ChineseUniversity of Hong Kong, Hong Kong (e-mail: [email protected];[email protected]; [email protected]).
Color versions of one or more of the figures in this paper are availableonline at http://ieeexplore.ieee.org.
Digital Object Identifier 10.1109/TIP.2017.2779274
representation (SR) based methods. The concept of SR was 39
first introduced into image fusion in [12], which employs the 40
orthogonal matching pursuit algorithm to image patches of 41
multiple source images. Adaptive SR model was proposed 42
in [13] for simultaneous image fusion and denoising. In [14], 43
an over-complete dictionary was learned from numerous 44
training samples similar to the source images, thus adding 45
adaptability for the sparse representation. Zhang et al. [15] 46
also proposed a multi-task SR method that considers not 47
only sharpness information, like edges and textures, of each 48
image patch but also relationship among source images. The 49
major advantage of these two groups of methods is that 50
sharpness information can be well preserved in the fused 51
image. However, since spatial consistency is not fully con- 52
sidered, brightness and color distortions may be observed. 53
Moreover, slight image misregistration will result in ghosting 54
artifacts due to their sensitivity to high-frequency components. 55
The third group consists of methods based on computational 56
photography techniques such as light field rendering [16]. This 57
kind of methods discovers more of the physical formation of 58
multi-focus images and reconstructs the all-in-focus images. 59
The last group consists of methods performed in spatial 60
domain, which can make full use of the spatial context and 61
provide spatial consistency. A commonly used approach is to 62
take each pixel in the fused image as the weighted average 63
of the corresponding pixels in the source images. The weights 64
are determined according to how well each pixel is focused, 65
which is usually measured by some metrics. These metrics, 66
such as spatial frequency inside a surrounding block, are 67
named as focus measures. However, this kind of methods 68
may generate blocking artifacts on object boundaries due 69
to the block-based computation of focus measure. To solve 70
this problem, some region-based fusion methods have been 71
proposed and calculation is done in regions with irregular 72
shapes obtained by segmentation [17]. A common limitation of 73
region-based methods is that they rely heavily on the accuracy 74
of segmentation. Another way is post-processing of the initial 75
weight maps [18]–[20]. In [21], a noise-robust selective fusion 76
method that models the change of weights as a Gaussian 77
function is proposed, but it can only achieve good perfor- 78
mance on properly ordered image sequence with 3 or more 79
images. Recently, image matting was introduced to refine the 80
initial weight maps and can achieve good performance [22]. 81
However, the performance relies on good initial weight maps, 82
and the common block-wise computation is still a limitation. 83
Our previous work [23] uses one of the parameters of edge 84
model directly as focus measure. However, edge model is a 85
1057-7149 © 2017 IEEE. Personal use is permitted, but republication/redistribution requires IEEE permission.See http://www.ieee.org/publications_standards/publications/rights/index.html for more information.

IEEE P
roof
2 IEEE TRANSACTIONS ON IMAGE PROCESSING
sparse feature representation method and focus measure values86
only exist at edge locations. So image matting was applied to87
propagate the focus measure values to the whole image. Since88
the matting process handles source images separately without89
considering the correlation among them, the propagation effect90
is very limited and the fusion process is also not stable in many91
situations.92
To solve the problems mentioned above, a novel edge model93
and multi-matting (EMAM) based multi-focus image fusion94
method is proposed in this paper, which can be classified as the95
fourth group of methods. Firstly, a novel method that combines96
a traditional focus measure and edge model is developed97
to estimate focus maps. Then a new multi-matting model98
is proposed to spread the focus maps to the whole image99
region considering the correlation among source images and100
obtain final weight maps. The proposed method maintains the101
advantages of the last group of methods and meanwhile over-102
comes the weakness. Experimental results demonstrate that the103
proposed method outperforms current state-of-the-art fusion104
methods under various situations. The main contributions of105
the proposed fusion approach are highlighted as follows.106
(i) The utilization of edge model when estimating focus107
maps removes block artifacts but allows sharpness information108
to be preserved as good as the first two groups of methods.109
The combination of edge model with traditional focus measure110
makes the proposed method robust to noise.111
(ii) The proposed multi-matting model makes full use of the112
spatial consistency and the correlation among source images,113
and thus achieves better performance at object boundaries than114
region-based methods and existing matting-based methods.115
The multi-matting scheme also produces improved robustness116
to misregistration.117
The rest of the paper is organized as follows. A brief118
introduction of the defocus model and edge model is given in119
section II. Section III gives problem formulation and details120
the proposed image fusion algorithm. Experimental results121
and conclusions are presented in Section IV and Section V122
respectively.123
II. BACKGROUND124
A. Defocus Model125
When a scene is captured using a camera, a surface which is126
not on the focal plane will form a blur region on the image, and127
the region is regarded as defocused. Such blurring process is128
usually modeled as a 2D linear space-invariant system, which129
is characterized as the convolution of the ideal focused content130
in that region f (x, y) with a space-invariant Point Spread131
Function (PSF) h(x, y):132
g(x, y) = h(x, y) ⊗ f (x, y) + n(x, y), (1)133
where g(x, y) denotes the defocused content, n(x, y) is noise134
and ⊗ denotes convolution operator. In practice, due to the135
polychromatic illumination, diffraction, camera lens aberra-136
tion, etc., the PSF is usually approximated by a 2D Gaussian137
filter [24], [25], that is:138
h(x, y; σ f ) = 1
2πσ 2f
ex p(− x2 + y2
2σ 2f
), (2)139
Fig. 1. (a) 1-D structure features in a 2D image. (b) s1(x) edge model.(c) Convolution of s1(x) and the derivative of a Gaussian filter. (d) Parametricedge model when the typical edge is defocused.
where σ f is the spread parameter, which determines the 140
blurriness of the image. The spread parameter is strongly 141
related to the distance between the surface and the camera, 142
in other words, the depth of the surface. 143
B. Edge Modeling 144
To exploit the information of above defocus model from 145
a defocused image, a parametric edge model [26]–[29] is 146
adopted here. As shown in Fig. 1(a), edges in a 2D image have 147
local 1D structure features, where sharp intensity changes can 148
be observed in the direction of x and nearly no change in the 149
perpendicular direction. Consider an edge point which locates 150
at x0 as shown in Fig. 1(a). The intensity in the direction of x , 151
as represented by s1(x) in Fig. 1(b), is modeled as a Gaussian 152
smoothed step edge which is equal to the convolution of a 153
step edge and a Gaussian filter: 154
s1(x; b, c, σ1, x0) = e(x; b, c, x0) ⊗ h(x; σ1), (3) 155
where e(x; b, c, x0) = cU(x − x0) + b and h(x; σ1) = 156
(1/√
2πσ 21 ) exp(−x2/2σ 2
1 ). U(·) is unit step function, c rep- 157
resents edge contrast, b represents edge basis and the spread 158
parameter of Gaussian filter σ1 represents edge width. 159
An existing fitting process is utilized to extract edge parame- 160
ters σ1, x0, b and c. The typical edge s1(x; b, c, σ1, x0) is con- 161
volved with the derivative of a Gaussian filter h′d(x; σd), and 162
the output shown in Fig. 1(c) is denoted as d(x; c, σ1, x0, σd ). 163
Then the edge parameters σ1 and x0 are estimated: 164
σ1 =√
1
ln( d1d1d2d3
)− σ 2
d , x0 = ln( d2d3
)
2ln( d1d1d2d3
), (4) 165
where d1 = d(xe; c, σ1, x0, σd ), d2 = d(xe + 1; c, σ1, x0, σd ) 166
and d3 = d(xe − 1; c, σ1, x0, σd ). xe is the discrete location 167
with largest d(x; c, σ1, x0, σd ) value. Empirical results suggest 168
that σd = 1 is a reasonable value for most natural images. 169
According to (1), an edge in a defocused region can be 170
regarded as the convolution of a typical edge and a Gaussian 171
filter with spread parameter σ f . Since the convolution of two 172
Gaussian functions is still Gaussian, the defocused edge s2(x) 173
at location x0, as shown in Fig. 1(d), can be represented as: 174
s2(x; x0) = s1(x; b, c, σ1, x0) ⊗ h(x; σ f ) 175
= e(x; b, c, x0) ⊗ h(x; σ1) ⊗ h(x; σ f ) 176
= e(x; b, c, x0) ⊗ h(x; σ2), (5) 177

IEEE P
roof
CHEN et al.: ROBUST MULTI-FOCUS IMAGE FUSION USING EDGE MODEL AND MULTI-MATTING 3
Fig. 2. Schematic diagram of the proposed image fusion method based on edge model and multi-matting model.
where σ2 =√
σ 21 + σ 2
f . The defocused edge s2(x) also fits the178
edge model and σ2 can be estimated by (4). Obviously σ2 is179
larger than σ1.180
To determine the direction of the edge at each pixel, gra-181
dients along the two image axis directions are first estimated182
separately. Then the perpendicular direction of the edge can be183
obtained by the ratio of these two gradients and edge model184
is applied to estimate the parameters along this direction.185
III. PROBLEM FORMULATION AND PROPOSED APPROACH186
Multi-focus image fusion is to fuse several source images,187
which are captured with different focus settings, into an188
all-in-focus image. The source images are usually assumed to189
be well aligned. In general, most multi-focus fusion methods190
performed in spatial domain contain two steps: focused region191
identification and focus map estimation, weight map estima-192
tion and fusion. Each source image is only well focused in193
some local regions. To identify these focused regions, focus194
measure is usually used to make comparisons among source195
images at the same location and to estimate a focus map196
for each source image. Then a fused image is obtained as a197
weighted sum of the source images, where the needed weight198
maps can be estimated from the focus maps.199
Our proposed method follows the general steps of methods200
performed in spatial domain. Fig. 2 summarizes the main201
processes of the proposed fusion method. First, initial focus202
maps are estimated using a traditional focus measure, and203
the edge model described in section II-B is utilized to refine204
them. Then a multi-matting scheme is used to obtain accurate205
focused regions from the focus maps and to estimate weight206
maps for all source images. With these weight maps, the fused207
all-in-focus image IF is obtained as a weighted sum of the208
source images I1, · · · , IN :209
IF (i) =N∑
k=1
wk(i)Ik(i), (6)210
where i denotes pixel index.211
A. Focus Map Estimation and Refinement212
Regions labelled in a focus map represent the best focused213
regions among all source images. Since regions wrongly214
labelled as the best focused regions of an source image will 215
probably result in artifacts in the final fused image, it is 216
much less damaging if no source image is identified as the 217
best focused one in these unreliable regions. The proposed 218
method achieves good fusion results even though only parts 219
of focused regions are labelled in each focus map by means of 220
multi-matting. In this paper, a novel method which combines 221
a traditional focus measure and edge model is proposed to 222
estimate reliable focus maps. 223
A comparison of various traditional focus measures can be 224
found in [30] and [31]. As shown in these papers, gradient 225
energy [32] is a good candidate that provides high preci- 226
sion. The focus measure of a pixel at location (x, y) in the 227
k-th source image Ik(k = 1, · · · , N) is defined as: 228
F Mk(x, y) =∑
(x,y)∈�(x,y)
(Ikx (x, y)2 + Iky(x, y)2), (7) 229
where �(x, y) is the r × r block with (x, y) at the center, 230
Ikx and Iky denote the gradient values in vertical and hori- 231
zontal directions in source image Ik respectively. The source 232
image that is best focused at (x, y) should have the largest 233
focus measure value among all source images at the same 234
location. 235
At each location (x, y), focus measures F Mk(x, y)(k = 236
1, · · · , N) corresponding to the N source images are com- 237
pared with each other, and the largest focus measure 238
F Mt (x, y) is found. Then two conditions are used to verify 239
that the decision of t is reliable, which implies source image It 240
is definitely best focused at (x, y). 241
F Mt (x, y) > F Mth, (8) 242
F Mt (x, y)1
N−1
∑k �=t,k=1,··· ,N
F Mk(x, y)> Rth, (9) 243
where F Mth is a constant threshold for the maximum focus 244
measure value, and Rth is a constant threshold for the ratio 245
of the maximum focus measure to the mean of other focus 246
measures at each location. Then initial focus maps Mk(k = 247
1, · · · , N) can be generated as follows. 248
Mk(x, y) ={
1 if k = t,
0 if k �= t or t is not reliable.(10) 249

IEEE P
roof
4 IEEE TRANSACTIONS ON IMAGE PROCESSING
Fig. 3. Comparison between the blocks at the same position of two sourceimages. (a) Source image 1 and extracted block. (b) Source image 2 andextracted block. Point A′ has higher focus measure value than A, but point Bhas higher focus measure value than B ′ due to block computation.
Fig. 4. Initial focus maps of the two source images. (a) Focus map of sourceimage 1 and extracted block. (b) Focus map of source image 2 and extractedblock.
It should be noted that at some locations no source image250
satisfies conditions (8) and (9). Thus, the decision of t is251
regarded as not reliable and all focus maps will be set to252
zeros at these locations. One reason for these two conditions is253
based on observations of wrong decisions in flat regions which254
have little texture. For each location in these regions, the focus255
measures of source images generally have low magnitude and256
low inter-image contrast. The decision of t will be unstable257
and therefore (8) and (9) are introduced.258
Another reason is the limitation of block computation,259
which is demonstrated in Fig. 3. Source image 1 in Fig. 3a260
focuses in background (a big clock) and source image 2 in261
Fig. 3b focuses in foreground (a small clock). Since focus262
measure of each pixel is computed from all gradients inside263
an r × r block centered at the pixel, problems may arise at264
the boundary of foreground and background. This is especially265
true when the block centered at a pixel contains both rich fore-266
ground texture and rich background texture, such as pixel B267
and pixel B ′ in Fig. 3. B and B ′ are actually foreground pixels268
and the focus measure of B ′ should be larger than that of B269
since B ′ is better focused. But the sharp edges of shape ‘8’ in270
the background, which are inside the block centered at B ,271
greatly influence the computation of focus measure. Thus,272
the focus measure of B ′ may be very similar to B , which273
will make the comparison result unreliable. This problem does274
not happen for pixels A and A′, which are also at a same275
location, since the background inside the block centered at that276
location is flat with little texture and will not influence focus277
measure computation. Fig. 4 shows the initial focus maps of278
the two source images from Fig. 3, where only reliable pixels279
such as A are marked and confusing pixels such as B will be280
ignored by conditions (8) and (9).281
However, these confusing pixels carry important infor-282
mation which can be used as a guidance at the boundary283
of foreground and background, and it is unwise to simply284
Fig. 5. Refined focus maps using edge model. (a) Focus map of sourceimage 1 and extracted block. (b) Focus map of source image 2 and extractedblock.
ignore them. That is why edge model is introduced. Since 285
edge width σ and edge location x0 are calculated using only a 286
few nearby pixels instead of a block, as stated in Section II-B, 287
they represent the edges at the boundary more precisely and 288
complement the ignored information. However, estimation 289
of edge model parameters may not be accurate in regions 290
where edges are too serried and irregular, in which case the 291
gradient energy focus measure performs better. Besides, direct 292
comparison of edge width σ is sensitive to the location shift 293
of edges among source images, especially when the source 294
images are not perfectly aligned. Therefore edge model and the 295
gradient energy focus measure are combined to complement 296
each other by following steps. 297
Firstly, edge width σ and edge location x0 are calculated 298
for each pixel based on (4). Then an edge map for each source 299
image is obtained with values of edge width at corresponding 300
edge locations. However, estimation of edge location x0 will 301
be inaccurate when edge is heavily defocused. In other words, 302
edge locations calculated from edges with large edge width 303
values are not reliable. It is shown in [26] that for most 304
well-captured natural images, clear edges have edge width σ 305
ranging from 0.01 to 0.5. Thus for each edge map, only edge 306
locations with edge width smaller than σth = 0.5 are remained. 307
Secondly, an edge linking algorithm [33] is applied to refine 308
the edge maps and all connected edge contours in each edge 309
map are listed. Finally, for each edge contour, we identify the 310
source image in which this contour is more likely to be focused 311
and the whole edge contour will be added to corresponding 312
focus map. The values of initial focus map Mk along this edge 313
contour are summed up to give a score of source image Ik , 314
and the source image with the largest score is regarded as the 315
best focused one for this contour. Then refined focus maps are 316
obtained, which are shown in Fig. 5. If the focus maps have 317
some intersections, though only at very few locations, we will 318
eliminate these locations from all focus maps to ensure the 319
focus maps reliable. Edge model gives an instruction in those 320
confusing regions, refines the initial focus maps, and greatly 321
benefits the following multi-matting process. 322
Edge model is used instead of Canny edge detector because 323
edge model provides parameter σ in addition to edge contour. 324
Information of σ plays an important role in the proposed 325
algorithm and cannot be replaced by the threshold of Canny 326
edge detector. As described in Section II, defocus process 327
is modeled as Gaussian blur. Edge model is derived from 328
this defocus model and parameter σ perfectly represents the 329
degree of defocus, uninfluenced by edge contrast. However, 330
Canny edge detector uses gradient as measure, which is easily 331

IEEE P
roof
CHEN et al.: ROBUST MULTI-FOCUS IMAGE FUSION USING EDGE MODEL AND MULTI-MATTING 5
influenced by edge contrast, and setting a threshold for Canny332
edge’s measure is not accurate when examining the degree of333
defocus. Thus, the edge map produced by edge model is more334
reliable and fit for our purpose.335
B. Weight Map Estimation With Multi-Matting336
Model and Fusion337
Since only parts of focused regions are labelled in each338
focus map after the above focus map estimation, a propagation339
step is needed to spread them based on local smoothness340
assumptions of colors. Then weight maps are obtained and341
used to generate the fused all-in-focus image. Image matting342
algorithm is a good choice which is adapted to meet our343
demand.344
1) Image Matting and Application in Multi-Focus Fusion:345
Image matting aims at extracting foreground and background346
from an observed image Io. Foreground and background will347
be represented as layers Ip1 and Ip2 respectively. The color348
of i -th pixel in Io is assumed to be a linear combination of349
the colors in the two layers350
Io(i) = α(i)Ip1(i) + (1 − α(i))Ip2(i), (11)351
where α is the opacity of layer Ip1 called alpha matte.352
α(i) = 1 or 0 means the i -th pixel belongs to layer Ip1 or353
layer Ip2, respectively. Image matting is to obtain an accurate354
alpha matte α together with the two layers. Since solving the355
three unknowns α, Ip1, Ip2 in (11) from a single image Io is an356
underconstrained problem, additional information is required357
to extract a good matte. Most recent methods [34]–[36] use a358
trimap which roughly segments the image into three regions:359
layer Ip1, layer Ip2 and unknown.360
Among all image matting algorithms, the closed-form mat-361
ting method by Levin [36] is a good choice because of its362
high accuracy and low requirement of trimap. This method is363
based on local smoothness assumptions on colors of the two364
layers, which also stand for the case of focus map. The alpha365
matte is obtained by solving366
arg minα
αT Lα + λ(αT − αTs )Ds(α − αs), (12)367
where αs is the vector form of the trimap and Ds is a diagonal368
matrix whose diagonal elements are one for labelled pixels369
which have specified alpha values in the trimap and zero for370
all the other pixels. λ is a parameter that controls the similarity371
between alpha matte α and the trimap αs at labelled locations.372
Usually λ is a large number to keep them consistent at labelled373
locations. For a color image, L is a matting Laplacian matrix374
whose (i, j)th element is375
∑
p|(i, j )∈Tp
(δi j − 1
Np
(1 + (I (i) − μp)(Cp + ε
NpE3)
−1376
(I ( j) − μp)))
, (13)377
where δi j is the Kronecker delta function, I (i) is the i -th378
pixel of image I and I ( j) is the j -th pixel of image I . The379
summation is done for all windows Tp that contain these two380
pixels. Tp is the 3 × 3 window centered at p-th pixel, Np is381
the number of pixels in this window, μp and Cp are the mean 382
vector and covariance matrix of this window respectively. E3 is 383
the 3 × 3 identity matrix and ε is a regularizing parameter. 384
Since the cost function (12) is quadratic, α is obtained by 385
solving the following sparse linear system: 386
(L + λDs)α = λDsαs . (14) 387
Image matting algorithms can be used to obtain accurate 388
focused region in image and video applications [37], [38]. 389
More specifically, for each source image, regions which 390
are best focused among all source images are regarded as 391
layer Ip1, and the remaining regions are all regarded as 392
layer Ip2. The refined focus map obtained in Section III-A 393
can be used as the trimap. The resulting alpha matte obtained 394
by the matting algorithm above can discriminate needed best 395
focused regions from each source image, and the alpha matte 396
is regarded as an initial weight map. 397
However, this image matting method can only handle a 398
single image at one time. In the case of multi-focus fusion, 399
two or more focus maps need to be handled, each of which 400
corresponds to one of the source images. A common idea is to 401
separately handle each focus map using the abovementioned 402
single image matting and then normalize the generated initial 403
weight maps to make them sum up to one at each location. 404
Then these normalized weight maps are used to obtain multi- 405
focus fusion result by the weighted sum of source images. 406
However, this idea has problems when all initial weight maps 407
have very small values at some locations. Errors will be 408
magnified at these locations and the fusion result will not be 409
stable. Besides, source images are actually capturing the same 410
scene and must have high correlation, which is also not fully 411
utilized. Another similar method can be found in [22], which 412
uses single image matting to obtain initial weight maps and 413
generates final weight maps using a non-linear combination 414
of these initial weight maps. However, source images are not 415
treated with equal importance under the non-linear operation, 416
and different order of source images will lead to different 417
fusion result. Besides, one of the focus maps is not used in 418
the non-linear operation, which will cause information lost and 419
errors possibly. Moreover, it cannot solve the problem when all 420
initial weight maps have very small values at some locations 421
either. 422
2) Proposed Multi-Matting Model: In consideration of the 423
limitations of existing matting-based fusion methods and the 424
high correlation among source images, a novel multi-matting 425
model is proposed to estimate weight maps from the focus 426
maps. 427
The focused region of one source image Ik will spread out 428
when this region is defocused in other source images. So the 429
focused region can only be accurately extracted from Ik . Then 430
a cost term of each weight map is defined using only the local 431
smoothness constraints derived from Ik . 432
Es(wk) = wTk Lkwk + λk(w
Tk − mT
k )Dk(wk − mk), (15) 433
where mk is the vector form of the k-th focus map Mk , and 434
Dk is a diagonal matrix whose diagonal elements are one for 435
labelled pixels in mk and zero for all other pixels. wk is the 436
vector form of the k-th weight map to be solved, and Lk is the 437

IEEE P
roof
6 IEEE TRANSACTIONS ON IMAGE PROCESSING
matting Laplacian matrix of the k-th source image Ik defined438
in the same way as (13). λk is a parameter that controls the439
similarity between weight map wk and the focus map mk at440
labelled locations.441
To utilize the correlation among source images, the cost442
terms of all weight maps are taken into consideration in a443
single optimization problem under a strong constraint that the444
sum of weight maps at each location should be equal to one.445
The parameters λ1, · · · , λN are all set to the same value λ to446
ensure the equal importance of all focus maps.447
arg minw1,··· ,wN
N∑
k=1
(wT
k Lkwk + λ(wTk − mT
k )Dk(wk − mk )),448
s.t .N∑
k=1
wk = e, (16)449
where e is an all-ones vector. It should be noted that existing450
matting-based methods need to generate a trimap for each451
focus map with both foreground labels and background labels.452
However, the proposed method only needs foreground labels453
on each focus map mk and gives more freedom to the454
propagation of focus maps.455
Solving (16) is a quadratic programming problem with456
only equality constraints. The Lagrange function and lagrange457
multipliers are used, and it is readily shown that the solution458
is given by the following linear system:459
⎡⎢⎢⎢⎣
L1 + λD1 0 0 E
0. . . 0 E
0 0 L N + λDN EE E E 0
⎤⎥⎥⎥⎦
⎡⎢⎢⎢⎣
w1...
wN
θ/2
⎤⎥⎥⎥⎦ =
⎡⎢⎢⎢⎣
λm1...
λmN
e
⎤⎥⎥⎥⎦,460
(17)461
where E is the identity matrix with the same size as Lk and462
θ is a set of Lagrange multipliers. Since the matting Laplacian463
matrixes Lk defined by (13) are symmetric and very sparse,464
the leftmost matrix in (17) is also symmetric and sparse. Thus465
the close-form solution to this optimization problem can be466
computed with not too much computation cost.467
3) Comparison With Single Image Matting Method:468
In single image matting, the matte w0k of image Ik is obtained469
by:470
w0k = (Lk + λDk)−1λDk mk .471
If we denote the sum of all the mattes of source images as472
w0A =N∑
k=1
((Lk + λDk)−1λDk mk),473
then the matte for each source image after normalization is:474
w0k = w0k ./w0A475
= w0k + (−w0k ./w0A). ∗ (w0A − e), (18)476
where ./ and .∗ denote pixel-wise division and multiplication,477
respectively.478
In multi-matting, the solution of (17) can be obtained479
through matrix computation, which is detailed in Appendix.480
The matte for each source image after multi-matting can be 481
expressed as: 482
wk = w0k + (Lk + λDk)−1S−1
ch (w0A − e), (19) 483
where Sch is the Schur complement of the left coefficient 484
matrix in (17) 485
Sch = −N∑
k=1
(Lk + λDk)−1. 486
From the comparison of (18) and (19), it can be seen 487
that the single image matting method only uses each matte 488
w0k and w0A for normalization, and this process is not 489
stable since w0A may be very close to 0 at some locations. 490
The proposed multi-matting method makes more use of the 491
correlation among source images implied by Lk , Dk and Sch , 492
thus provides better guidance in regions where single image 493
matting performs unsatisfactory. 494
The constraint in the optimization problem is derived from, 495
but is not limited to weight normalization. It not only provides 496
an adaptive normalization according to image contents, but 497
also provides the correlation among source images to the 498
matting based cost function. Existing matting based fusion 499
methods conduct focus map matting and weight map normal- 500
ization separately, and ignore the fact that these two processes 501
can help each other. However, the proposed method utilizes the 502
fact and achieves better performance, especially in flat regions 503
and boundary regions. 504
In flat regions, where the focus maps have few labels, 505
it is hard to have a good spread effect here using single 506
image matting. The generated initial weight maps will all have 507
small values at these locations and errors will be magnified 508
during normalization. However, the proposed method realizes 509
an adaptive normalization by minimizing the matting cost 510
function. It helps judging which source image is more likely 511
to be best focused at these locations based on smoothness of 512
image content. 513
In boundary regions, where the initial focus maps have 514
many labels, the single image matting may spread too much 515
to unwanted regions. However, the equality constraint in 516
the proposed method explores the correlation among source 517
images. That is, at each location, if the weight value of one 518
weight map is close to 1, the other weight maps should 519
have very small weight values close to 0. Thus the excessive 520
spreading will be suppressed when minimizing the matting 521
based cost function. 522
4) Iterative Refinement: Recall that weight maps should be 523
close to 0 or 1 for most image pixels since majority of image 524
pixels are opaque and can be found best focused in one of 525
the source images. This kind of constraints can be modeled 526
using L1 norm or integer programming in optimization, both 527
of which are hard to be solved [39]. However, by observing 528
results of image matting methods, we found that the pixels 529
which are far from the labelled pixels are not likely to have 530
alpha values close to 0 or 1 even though they have similar 531
color with the labelled pixels. In other words, quality of the 532
initial focus maps is important, and more labelled pixels will 533
lead to better results. 534
IEEE P
roof
CHEN et al.: ROBUST MULTI-FOCUS IMAGE FUSION USING EDGE MODEL AND MULTI-MATTING 7
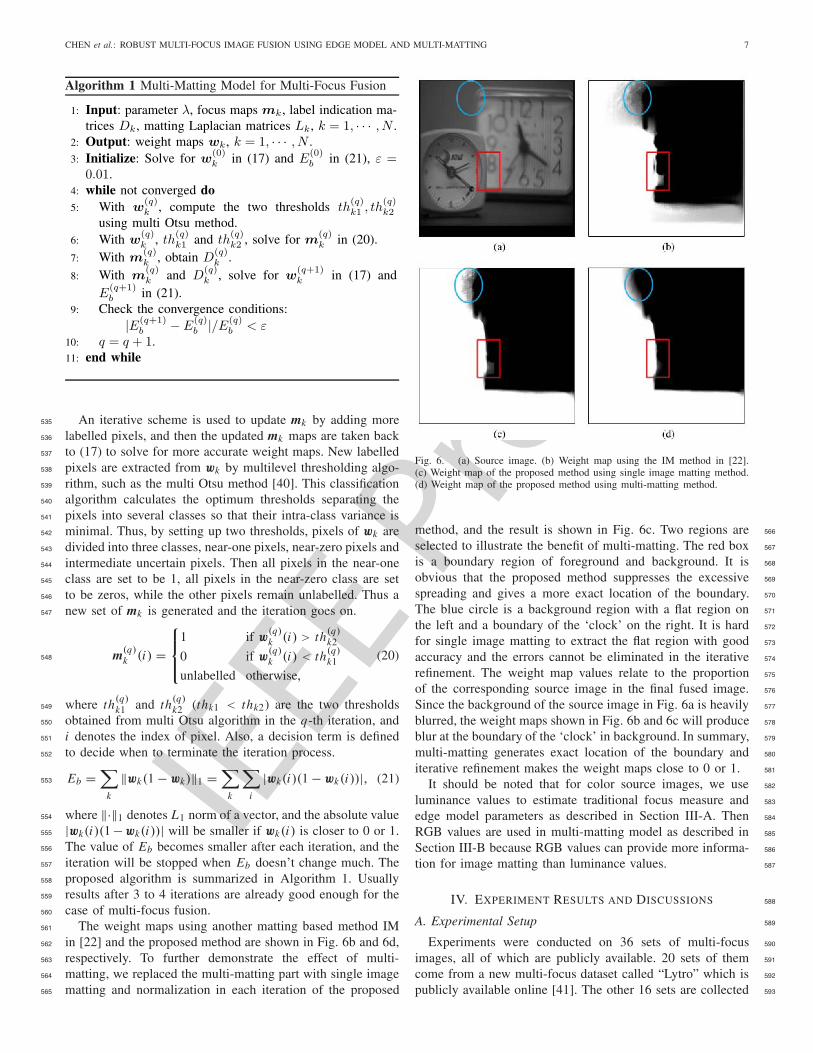
Algorithm 1 Multi-Matting Model for Multi-Focus Fusion
An iterative scheme is used to update mk by adding more535
labelled pixels, and then the updated mk maps are taken back536
to (17) to solve for more accurate weight maps. New labelled537
pixels are extracted from wk by multilevel thresholding algo-538
rithm, such as the multi Otsu method [40]. This classification539
algorithm calculates the optimum thresholds separating the540
pixels into several classes so that their intra-class variance is541
minimal. Thus, by setting up two thresholds, pixels of wk are542
divided into three classes, near-one pixels, near-zero pixels and543
intermediate uncertain pixels. Then all pixels in the near-one544
class are set to be 1, all pixels in the near-zero class are set545
to be zeros, while the other pixels remain unlabelled. Thus a546
new set of mk is generated and the iteration goes on.547
m(q)k (i) =
⎧⎪⎨⎪⎩
1 if w(q)k (i) > th(q)
k2
0 if w(q)k (i) < th(q)
k1
unlabelled otherwise,
(20)548
where th(q)k1 and th(q)
k2 (thk1 < thk2) are the two thresholds549
obtained from multi Otsu algorithm in the q-th iteration, and550
i denotes the index of pixel. Also, a decision term is defined551
to decide when to terminate the iteration process.552
Eb =∑
k
‖wk(1 − wk)‖1 =∑
k
∑
i
|wk(i)(1 − wk(i))|, (21)553
where ‖·‖1 denotes L1 norm of a vector, and the absolute value554
|wk(i)(1 −wk(i))| will be smaller if wk(i) is closer to 0 or 1.555
The value of Eb becomes smaller after each iteration, and the556
iteration will be stopped when Eb doesn’t change much. The557
proposed algorithm is summarized in Algorithm 1. Usually558
results after 3 to 4 iterations are already good enough for the559
case of multi-focus fusion.560
The weight maps using another matting based method IM561
in [22] and the proposed method are shown in Fig. 6b and 6d,562
respectively. To further demonstrate the effect of multi-563
matting, we replaced the multi-matting part with single image564
matting and normalization in each iteration of the proposed565
Fig. 6. (a) Source image. (b) Weight map using the IM method in [22].(c) Weight map of the proposed method using single image matting method.(d) Weight map of the proposed method using multi-matting method.
method, and the result is shown in Fig. 6c. Two regions are 566
selected to illustrate the benefit of multi-matting. The red box 567
is a boundary region of foreground and background. It is 568
obvious that the proposed method suppresses the excessive 569
spreading and gives a more exact location of the boundary. 570
The blue circle is a background region with a flat region on 571
the left and a boundary of the ‘clock’ on the right. It is hard 572
for single image matting to extract the flat region with good 573
accuracy and the errors cannot be eliminated in the iterative 574
refinement. The weight map values relate to the proportion 575
of the corresponding source image in the final fused image. 576
Since the background of the source image in Fig. 6a is heavily 577
blurred, the weight maps shown in Fig. 6b and 6c will produce 578
blur at the boundary of the ‘clock’ in background. In summary, 579
multi-matting generates exact location of the boundary and 580
iterative refinement makes the weight maps close to 0 or 1. 581
It should be noted that for color source images, we use 582
luminance values to estimate traditional focus measure and 583
edge model parameters as described in Section III-A. Then 584
RGB values are used in multi-matting model as described in 585
Section III-B because RGB values can provide more informa- 586
tion for image matting than luminance values. 587
IV. EXPERIMENT RESULTS AND DISCUSSIONS 588
A. Experimental Setup 589
Experiments were conducted on 36 sets of multi-focus 590
images, all of which are publicly available. 20 sets of them 591
come from a new multi-focus dataset called “Lytro” which is 592
publicly available online [41]. The other 16 sets are collected 593

IEEE P
roof
8 IEEE TRANSACTIONS ON IMAGE PROCESSING
Fig. 7. A portion of the image sets used in our experiments.
online, which consist of one set of medical multi-focus images594
“bug” used in “Digital Photomontage” project [42], one set of595
Infrared multi-focus images “IR1g”, and another 14 sets which596
are widely used in multi-focus fusion research. The diversity597
of the image sets provides a good representation of various598
situations encountered in practice. A portion of the image sets599
are shown in Fig. 7.600
The proposed EMAM fusion method is compared601
with six multi-focus image fusion algorithms which are602
non-subsampled contourlet transform (NSCT) [8], guided603
filtering (GF) [11], image matting(IM) [22], sparse represen-604
tation (SR) [12], non-subsampled contourlet transform and605
sparse representation (NSCT-SR) [43], and dense scale invari-606
ant feature transform (DSIFT) [20]. Codes of all these methods607
are obtained online or directly from the authors, and the608
default parameters provided by the authors are adopted to keep609
consistency with the results given in the original papers.610
B. Objective Image Fusion Quality Metrics611
To evaluate the performance of different fusion methods612
objectively, several fusion quality metrics are needed. Since613
ground truth results for the case of multi-focus image fusion614
are usually not available, non-referenced quality metrics are615
generally preferred. A good survey of these kind of metrics616
can be found in [44]. Four quality metrics are adopted in this617
paper, which are also widely used in many related papers.618
For these four metrics, larger value means better fusion result.619
Default parameters provided by respective papers are used and620
details of these quality metrics are introduced as follows.621
1) Normalized Mutual Information (QN M I ): QN M I is an622
information theory based metric which measures the amount623
of original information in source images that is maintained624
in the fused image. Hossny et al. [46] modified the unstable625
traditional mutual information metric [45] to a normalized626
mutual information metric which is defined as627
QN M I = 2
[M I (A, F)
H (A) + H (F)+ M I (B, F)
H (B) + H (F)
], (22)628
where H (A), H (B) and H (F) are the marginal entropy of629
source image A, B and fused image F respectively. M I (A, F)630
is the mutual information between image A and F , which is631
defined as M I (A, F) = H (A) + H (F) − H (A, F). H (A, F)632
is the joint entropy between image A and F . M I (B, F) can633
be obtained similarly.634
2) Gradient-Based Fusion Performance (QG): This gra- 635
dient based metric is proposed to evaluate how well the 636
sharpness information in source images is transferred to the 637
fused image [47]. 638
QG 639
=∑N1
x=1
∑N2y=1(ϕ
A(x, y)AF (x, y) + ϕB(x, y)B F (x, y))∑N1
x=1
∑N2y=1(ϕ
A(x, y) + ϕB(x, y)), 640
(23) 641
where N1 and N2 are the width and height of a source 642
image respectively. AF is the element-wise product of edge 643
strength AFg and orientation preservation value AF
o of 644
source image A. B F is similarly defined for source image B . 645
ϕ A and ϕB are weighting coefficients that reflect the impor- 646
tance of AF and B F respectively. 647
3) Yang’s Metric (QY ): The structural similarity 648
(SSI M) [48] is used to derive Yang’s metric, which 649
measures the amount of structural information in source 650
images A and B that is preserved in the fused image F [49]. 651
QY =
⎧⎪⎪⎪⎨⎪⎪⎪⎩
γT SSIM(A, F |T ) + (1 − γT )SSIM(B, F |T ),
if SSIM(A, B|T ) ≥ 0.75
max{SSIM(A, F |T ), SSIM(B, F |T )},if SSIM(A, B|T ) < 0.75
(24) 652
where SSIM(·|T ) is the structural similarity in a local win- 653
dow T and γT = v(A|T )/(v(A|T ) + v(B|T )) is the local 654
weight derived from the local variance v(A|T ) and v(B|T ) 655
within the window T . 656
4) Chen-Blum Metric (QC B): This metric proposed in 657
Chen and Blum’s work [50] computes how well the contrast 658
features are preserved in fused image. Filtering is implemented 659
to each source image and the fused image in the frequency 660
domain. Then masked contrast maps for these images are 661
calculated by the information preservation value map whose 662
detailed definition can be found in [50]. Metric value is then 663
obtained as follows. 664
QC B 665
=∑N1
x=1
∑N2y=1(�A(x, y)PAF (x, y) + �B(x, y)PB F (x, y))
N1 N2, 666
(25) 667
where N1 and N2 are the width and height of the image, 668
�A and �B are the saliency maps for the source image 669
A and B , respectively. PAF and PB F are the information 670
preservation value maps. These two maps are computed from 671
the masked contrast map. 672
C. Parameters Setting 673
When calculating the focus measure in (7), the selection 674
of a large block size r improves robustness to noise but 675
reduces spatial resolution [51]. A radius r = 7 has been found 676
experimentally to be a good tradeoff in this work. The two 677
threshold values in (8) and (9) are set to be F Mth = 0.02 678
and Rth = 1.2. The choice of these two parameters is based 679
on observations that a 7 × 7 block with visible texture should 680

IEEE P
roof
CHEN et al.: ROBUST MULTI-FOCUS IMAGE FUSION USING EDGE MODEL AND MULTI-MATTING 9
TABLE I
EVALUATION METRIC VALUES OF DIFFERENT FUSION METHODS. THE METRIC VALUES IS THE AVERAGE VALUES OF ALL 36 IMAGE SETS.THE NUMBERS IN PARENTHESES DENOTE THE NUMBER OF IMAGE SETS THAT THIS METHOD BEATS THE OTHER METHODS
Fig. 8. (a) QN M I values of different F Mth values. (b) QG values ofdifferent F Mth values. (c) QY values of different F Mth values. (d) QC Bvalues of different F Mth values.
have the focus measure larger than 0.02, and the ratio value681
in (9) should be at least 1.2 if this block in that image is682
identified better focused than the other images. Experiments683
were conducted to analyze the sensitivity of F Mth and Rth ,684
and results are plotted in Fig. 8 and Fig. 9 respectively. It can685
be seen that F Mth and Rth are stable in the nearby range of686
our choices 0.02 and 1.2, which are marked by the red spots.687
The threshold for edge width is set to be σth = 0.5, since it688
is shown in [26] that majority of sharp edges have σ smaller689
than 0.5. It is shown in Fig. 10 that the setting of σth is stable690
in the nearby range of 0.5. Following the settings of image691
matting in [36], we set the parameter λ in (16) to be a large692
value 10 to keep wk and mk consistent at labelled locations.693
Since the choice of parameters is based on general properties694
of focus measure and edge model, this universal setting is695
independent to image content and provides good fusion results696
for all sets of multi-focus images.697
D. Experimental Results and Discussion698
1) Objective Evaluation Results: Objective evaluation699
results of different methods are shown in Table I, all of which700
are the average metric values over the whole 36 sets of images.701
The numbers in parentheses denote the number of image sets702
that this method surpasses the other methods. It is shown that703
the proposed EMAM fusion method clearly outperforms the704
other six methods in most cases in terms of the four different705
evaluation metrics, except QN M I in some sets of test images.706
A brief explanation about this is provided here. QN M I is a707
good metric since it estimates the mutual information between708
Fig. 9. (a) QN M I values of different Rth values. (b) QG values of differentRth values. (c) QY values of different Rth values. (d) QC B values of differentRth values.
Fig. 10. (a) QN M I values of different σth values. (b) QG values of differentσth values. (c) QY values of different σth values. (d) QC B values of differentσth values.
source images and fused image. But it does not consider 709
whether the local structure of source images is well preserved. 710
It is also reported in [11] that a very high QN M I value doesn’t 711
always mean good performance. The QN M I value tends to 712
be larger when the pixel values of the final fused image are 713
closer to one of the source images regardless of whether it 714
is focused or not. A simple test using the ‘block’ image set 715
was conducted and the results are shown in Table II. The 716
QN M I value when using one of the source images directly as 717
fusion result is dramatically elevated. The DSIFT method uses 718

IEEE P
roof
10 IEEE TRANSACTIONS ON IMAGE PROCESSING
Fig. 11. Gray source images ‘clock’ and the fusion results obtained by different methods. (a) Source image 1. (b) Source image 2. (c) NSCT. (d) GF.(e) IM. (f) SR. (g) NSCT-SR. (h) DSIFT. (i) EMAM.
TABLE II
SIMPLE TEST OF EVALUATION METRICS ON ‘CLOCK’ USING ONE OF
THE SOURCE IMAGES DIRECTLY AS FUSION RESULT
a particular weight strategy that vast majority of the weight719
map values will be assigned either 0 or 1, which is favored by720
QN M I metric. Thus the QN M I evaluation results of DSIFT721
for some test image sets are better than the proposed method.722
However, this strategy may produce some undesirable artifacts,723
which will be analyzed in detail in a later section IV-E3.724
We reckon that the four evaluation metrics and all groups725
of images should be considered together to evaluate real726
fusion performance. Besides the objective evaluation, it is also727
important to examine the performance of different methods728
through visual comparison, which is shown in the following729
part.730
2) Visualized Results: The fusion results of four groups of731
images are demonstrated to show advantages of the proposed732
method. These four groups are chosen to examine the robust-733
ness of the proposed method in various situations, including734
gray or color images, two or more source images, good or poor735
registration, and complex scenes.736
Figs. 11 illustrates a pair of multi-focus source images with737
good registration and the fusion results obtained by different738
fusion methods. To reveal the difference between these results,739
a close-up view of relevant regions in the red box is presented740
in the left-top of each sub-picture. The main challenge of this741
pair of images is the boundary region next to the ‘number 8’742
of the clock in the back. The boundary of the front clock is so743
close to the ‘number 8’ that many existing fusion methods are 744
not able to distinguish foreground part and background part 745
explicitly. As shown in Fig. 11i, the fused image obtained by 746
the proposed method perfectly distinguishes these two parts 747
and preserves the complementary information of them, due to 748
the combination of gradient energy focus measure and edge 749
model in the proposed method. The fusion results produced 750
by other methods as shown in Figs. 11c-11h have some kind 751
of erosion in the same region. Also, the sharp boundary of the 752
foreground in source image 2 cannot be reproduced by other 753
methods as well as the proposed EMAM method does. 754
Figs. 12a and 12b show two multi-focus images capturing 755
a dynamic scene. The head of the person in foreground 756
moved when this pair of images were captured, which is one 757
main reason for misregistration. Results obtained by different 758
methods are illustrated in Figs. 12c-12i. To allow a close 759
examination of the results, we show the normalized difference 760
image which is defined as: 761
IDn(x, y) = ID(x, y) − Imin
Imax − Imin, (26) 762
where ID = IF − Ir denotes the difference image between the 763
fused image IF and the source image Ir that is best focused 764
in concerned regions. Imax and Imin are the maximum and 765
minimum values respectively in all difference images of all 766
methods. That is, 767
Imax = maxall methods
maxx,y
ID(x, y) 768
Imin = minall methods
minx,y
ID(x, y) 769
From an examination of these results, it is obvious that 770
the proposed method well preserves the sharpness infor- 771
mation from corresponding source image and excludes the 772
influence of the other. The results of other fusion methods 773

IEEE P
roof
CHEN et al.: ROBUST MULTI-FOCUS IMAGE FUSION USING EDGE MODEL AND MULTI-MATTING 11
Fig. 12. Gray source images and the fusion results obtained by different methods. (a) Source image 1. (b) Source image 2. (c) NSCT. (d) GF. (e) IM.(f) SR. (g) NSCT-SR. (h) DSIFT. (i) EMAM.
Fig. 13. Normalized difference images in the red block between the Source 2 and each of the fused images in Fig. 12. (a) NSCT. (b) GF. (c) IM. (d) SR.(e) NSCT-SR. (f) DSIFT. (g) EMAM.
contain artifacts in the misregistration region in the red box.774
Normalized difference images of this misregistration region775
are generated using source image 2 as a reference, and a close-776
up view of them is provided in Fig. 13. The good results of777
the proposed multi-matting method is due to the emphasis of778
spatial consistency, which is not fully considered in multi-779
scale decomposition based methods and sparse representation780
methods. The results of IM method are presented in Fig. 12e781
and Fig. 13c, which also have good performance in the misreg-782
istration region. However, the artifacts in the upper boundary783
of the foreground, as shown in the blue circle in Fig. 12e,784
reveal its limitation compared to the proposed method.785
Figs. 14a-14c demonstrate a set of color images with786
zooming in and out effect, which is another reason for misreg-787
istration. This phenomenon widely exists when changing the788
focus setting to capture images that focus in different objects.789
As shown in Fig. 14j, the proposed method outperforms790
the other fusion methods(see Figs. 14d-14i). The selected791
region in the red box is a good example, where the other792
methods are more likely to produce artifacts such as color793
distortion. Even the state-of-the-art method GF suffers from794
halo artifact in that region. Normalized grayscale difference795
images of this region are generated using source image 3 as a796
reference, and a close-up view of them is provided in Fig. 15.797
The proposed method avoids the halo artifact and generates798
better results than the other methods, except for the DSIFT799
method whose results in this region are comparable to ours.800
However, comparison of selected region in the blue circle, 801
as shown in Fig. 14i and Fig. 14j, demonstrates the good 802
performance of the proposed method. This is because the 803
proposed multi-matting model is performed in RGB space, 804
while the DSIFT method is performed in grayscale. 805
Figs. 16a-16b demonstrate a pair of color images captured 806
at complex scenes, where the foreground is a steel mesh and 807
the background can be seen through the holes. This situation 808
is most challenging for spatial-based methods, since the shape 809
of the foreground is not regular. Undesirable artifacts may 810
appear at some narrow foreground regions, where block-based 811
focus measures cannot perform very well. The selected regions 812
in the red box and blur circle shown in Fig. 16 are good 813
examples, in which the spatial-based methods IM and DSIFT 814
mislabel many pixels and have obvious artifacts. The two 815
source images are with perfect registration, so the multi-scale 816
decomposition based methods and sparse representation meth- 817
ods may not suffer from halo and ringing artifacts as described 818
in previous examples. However, the fusion results of them 819
still looks blurry, especially at the boundary of foreground 820
and background. The blurry artifacts are more obvious in the 821
normalized difference images as shown in Fig. 17, which use 822
source image 2 as a reference. It can be seen that method 823
NSCT, SR, NSCT-SR and GF still have a lot of background 824
residuals in the two selected regions. The proposed method’s 825
results as shown in Fig. 16i and 17g have few artifacts with a 826
much clearer boundary of foreground and background. 827

IEEE P
roof
12 IEEE TRANSACTIONS ON IMAGE PROCESSING
Fig. 14. Color source images ‘book’ and the fusion results obtained by different methods. (a) Source image 1. (b) Source image 2. (c) Source image 3.(d) NSCT. (e) GF. (f) IM. (g) SR. (h) NSCT-SR. (i) DSIFT. (j) EMAM.
Fig. 15. Normalized difference images in the red block between the Source 3 and each of the fused images in Fig. 14. (a) NSCT. (b) GF. (c) IM. (d) SR.(e) NSCT-SR. (f) DSIFT. (g) EMAM.
E. Additional Analysis828
1) Combination of Edge Model: To investigate the effect829
of edge model, an experiment was performed without using830
edge model while other parts of the proposed method remain831
the same. The final weight map of the foreground using the832
complete proposed method is shown in Fig. 18b, and the final833
weight map without using edge model is shown in Fig. 18c.834
It can be seen that the result without using edge model tends835
to erode and dilate in the red box, which will lead to poor836
performance in this boundary region of the final fusion result. 837
Edge model compensates the shortage of the traditional focus 838
measure in this region, and provides a proper guidance for the 839
following multi-matting procedure. The evaluation results are 840
listed in Table III, which also shows the benefit of using edge 841
model. 842
2) Robustness to Noise: To examine the robustness to noise 843
of the proposed method, experiments were conducted. The 844
‘clock’ image pair is used as an example for explanation and 845

IEEE P
roof
CHEN et al.: ROBUST MULTI-FOCUS IMAGE FUSION USING EDGE MODEL AND MULTI-MATTING 13
Fig. 16. Color source images and the fusion results obtained by different methods. (a) Source image 1. (b) Source image 2. (c) NSCT. (d) GF. (e) IM.(f) SR. (g) NSCT-SR. (h) DSIFT. (i) EMAM.
Fig. 17. Normalized difference images between the Source 2 and each of the fused images in Fig. 16. (a) NSCT. (b) GF. (c) IM. (d) SR. (e) NSCT-SR.(f) DSIFT. (g) EMAM.
TABLE III
EVALUATION METRIC VALUES OF THE PROPOSED METHODWITH AND WITHOUT USING EDGE MODEL
similar results were obtained using other image sets. Differ-846
ent levels of Gaussian noise were added to the two source847
images and the i -th noise level corresponds to noise variance848
σ 2n = 0.0003i . 40 levels of noise were used and source images849
of level 10, 20 and 40 are demonstrated in Fig. 19.850
All the seven methods were used to fuse the source images 851
of each noise level. Since there is no groundtruth fusion 852
results, the 4 quality metrics mentioned in Section IV-B 853
are used for evaluation. The evaluation results are shown 854
in Fig. 20, where each sub-figure demonstrates the change 855
of one quality metric as noise level grows. The red solid 856
lines in these figures represent the proposed method, and the 857
performance in metric QG ,Qy and QC B are still better than 858
the other methods as noise level grows. The performance 859
in metric QN M I is not as good as DSIFT whose weight 860
strategy is favored by QN M I metric. QN M I value tends to 861
be large when pixel values of the final fused image are 862
IEEE P
roof
14 IEEE TRANSACTIONS ON IMAGE PROCESSING
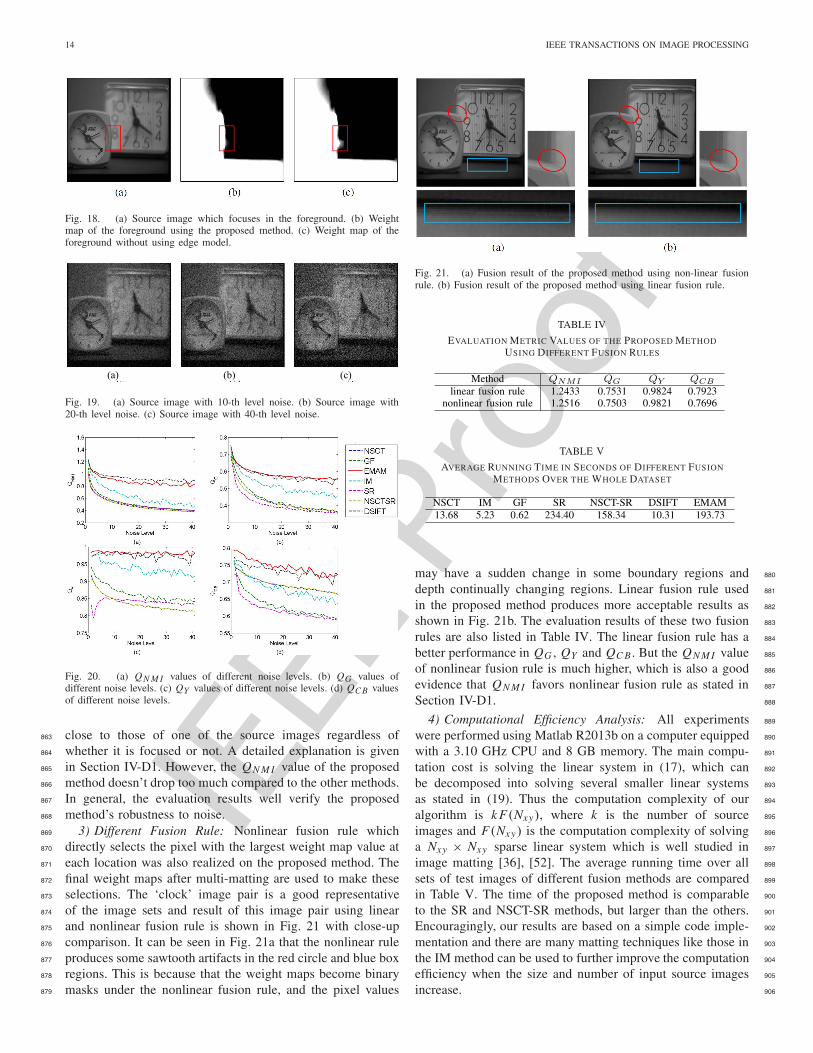
Fig. 18. (a) Source image which focuses in the foreground. (b) Weightmap of the foreground using the proposed method. (c) Weight map of theforeground without using edge model.
Fig. 19. (a) Source image with 10-th level noise. (b) Source image with20-th level noise. (c) Source image with 40-th level noise.
Fig. 20. (a) QN M I values of different noise levels. (b) QG values ofdifferent noise levels. (c) QY values of different noise levels. (d) QC B valuesof different noise levels.
close to those of one of the source images regardless of863
whether it is focused or not. A detailed explanation is given864
in Section IV-D1. However, the QN M I value of the proposed865
method doesn’t drop too much compared to the other methods.866
In general, the evaluation results well verify the proposed867
method’s robustness to noise.868
3) Different Fusion Rule: Nonlinear fusion rule which869
directly selects the pixel with the largest weight map value at870
each location was also realized on the proposed method. The871
final weight maps after multi-matting are used to make these872
selections. The ‘clock’ image pair is a good representative873
of the image sets and result of this image pair using linear874
and nonlinear fusion rule is shown in Fig. 21 with close-up875
comparison. It can be seen in Fig. 21a that the nonlinear rule876
produces some sawtooth artifacts in the red circle and blue box877
regions. This is because that the weight maps become binary878
masks under the nonlinear fusion rule, and the pixel values879
Fig. 21. (a) Fusion result of the proposed method using non-linear fusionrule. (b) Fusion result of the proposed method using linear fusion rule.
TABLE IV
EVALUATION METRIC VALUES OF THE PROPOSED METHOD
USING DIFFERENT FUSION RULES
TABLE V
AVERAGE RUNNING TIME IN SECONDS OF DIFFERENT FUSION
METHODS OVER THE WHOLE DATASET
may have a sudden change in some boundary regions and 880
depth continually changing regions. Linear fusion rule used 881
in the proposed method produces more acceptable results as 882
shown in Fig. 21b. The evaluation results of these two fusion 883
rules are also listed in Table IV. The linear fusion rule has a 884
better performance in QG , QY and QC B . But the QN M I value 885
of nonlinear fusion rule is much higher, which is also a good 886
evidence that QN M I favors nonlinear fusion rule as stated in 887
Section IV-D1. 888
4) Computational Efficiency Analysis: All experiments 889
were performed using Matlab R2013b on a computer equipped 890
with a 3.10 GHz CPU and 8 GB memory. The main compu- 891
tation cost is solving the linear system in (17), which can 892
be decomposed into solving several smaller linear systems 893
as stated in (19). Thus the computation complexity of our 894
algorithm is k F(Nxy), where k is the number of source 895
images and F(Nxy) is the computation complexity of solving 896
a Nxy × Nxy sparse linear system which is well studied in 897
image matting [36], [52]. The average running time over all 898
sets of test images of different fusion methods are compared 899
in Table V. The time of the proposed method is comparable 900
to the SR and NSCT-SR methods, but larger than the others. 901
Encouragingly, our results are based on a simple code imple- 902
mentation and there are many matting techniques like those in 903
the IM method can be used to further improve the computation 904
efficiency when the size and number of input source images 905
increase. 906
IEEE P
roof
CHEN et al.: ROBUST MULTI-FOCUS IMAGE FUSION USING EDGE MODEL AND MULTI-MATTING 15
V. CONCLUSIONS907
We have proposed an effective EMAM fusion method908
that outperforms current state-of-the-art fusion methods under909
various situations. The good performance is due to edge910
model and the multi-matting model. The combination of edge911
model and gradient energy focus measure well preserves912
the sharpness information in source images and defines the913
boundary of foreground and background accurately. The multi-914
matting model explicitly generates focus maps and weight915
maps efficiently in a single optimization problem, and has916
good performance in boundary and flat regions. These novel917
algorithms also make the proposed method robust to noise and918
misregistration in source images.919
APPENDIX920
DETAILS OF THE MATRIX COMPUTATION921
OF MULTI-MATTING922
Here we define923
w = [wT1 ,wT
2 , · · · ,wTN ]T ,924
S = [E, E, · · · , E]1×N ,925
where E is the identity matrix whose height and width are926
both equal to the number of pixels in one image,927
L = Diag(L1, L2, · · · , L N ),928
D = Diag(D1, D2, · · · , DN ),929
m = [mT1 , mT
2 , · · · , mTN ]T .930
So the linear system in (17) can be expressed as:931
[L + λD ST
S 0
][w
θ
]=
[λDm
e
],932
Here we use the properties of block matrix inversion to solve933
this linear system. First we calculate the Schur complement934
of the coefficient matrix.935
Sch = −S(L + λD)−1 ST936
Then we will have937
θ = −S−1ch S(L + λD)−1λDm + S−1
ch e938
w = (L + λD)−1(λDm − ST θ)939
Since L + λD is a diagonal block matrix, so the inverse of it940
(L +λD)−1 can be easily expressed using the inverse of each941
diagonal block.942
Diag((L1 + λD1)−1, (L2 + λD2)
−1, · · · , (L N + λDN )−1)943
Thus the Schur complement is944
Sch = −N∑
k=1
(Lk + λDk)−1.945
w can be calculated based on these properties: 946
w = (L + λD)−1λDm − (L + λD)−1 ST θ 947
=
⎡⎢⎢⎢⎣
(L1 + λD1)−1λD1m1
(L2 + λD2)−1λD2m2
...(L N + λDN )−1λDN mN
⎤⎥⎥⎥⎦ +
⎡⎢⎢⎢⎣
(L1 + λD1)−1S−1
ch e(L2 + λD2)
−1S−1ch e
...
(L N + λDN )−1S−1ch e
⎤⎥⎥⎥⎦ 948
+
⎡⎢⎢⎢⎣
(L1 + λD1)−1
(L2 + λD2)−1
...(L N + λDN )−1
⎤⎥⎥⎥⎦ S−1
ch
N∑
k=1
((Lk + λDk)−1λDk mk) 949
Thus each component of w can be obtained by 950
wk = (Lk + λDk)−1λDk mk 951
+ (Lk + λDk)−1S−1
ch
N∑
k=1
((Lk + λDk)−1λDk mk ) 952
− (Lk + λDk)−1S−1
ch e 953
= w0k + (Lk + λDk)−1S−1
ch (w0A − e). 954
ACKNOWLEDGMENT 955
The authors wish to thank Professor Zheng Liu for pro- 956
viding their code implementing objective quality metrics, 957
Professor Yu Liu for providing their MST-SR image fusion 958
toolbox and image dataset, Professor Peter Kovesi for provid- 959
ing their Computer Vision and Image Processing toolbox. 960
REFERENCES 961
[1] S. Li, X. Kang, L. Fang, J. Hu, and H. Yin, “Pixel-level image fusion: 962
A survey of the state of the art,” Inf. Fusion, vol. 33, pp. 100–112, 963
Jan. 2017. 964
[2] S. Li, B. Yang, and J. Hu, “Performance comparison of different multi- 965
resolution transforms for image fusion,” Inf. Fusion, vol. 12, pp. 74–84, 966
Apr. 2011. 967
[3] V. N. Gangapure, S. Banerjee, and A. S. Chowdhury, “Steerable local 968
frequency based multispectral multifocus image fusion,” Inf. Fusion, 969
vol. 23, pp. 99–115, May 2015. 970
[4] Y. P. Liu, J. Jin, Q. Wang, Y. Shen, and X. Dong, “Region level based 971
multi-focus image fusion using quaternion wavelet and normalized cut,” 972
Signal Process., vol. 97, pp. 9–30, Apr. 2014. 973
[5] J. J. Lewis, R. J. O’Callaghan, S. G. Nikolov, D. R. Bull, and 974
N. Canagarajah, “Pixel- and region-based image fusion with complex 975
wavelets,” Inf. Fusion, vol. 8, no. 2, pp. 119–130, 2007. 976
[6] L. Guo, M. Dai, and M. Zhu, “Multifocus color image fusion 977
based on quaternion curvelet transform,” Opt. Exp., vol. 20, no. 17, 978
pp. 18846–18860, 2012. 979
[7] Q.-G. Miao, C. Shi, P.-F. Xu, M. Yang, and Y.-B. Shi, “A novel 980
algorithm of image fusion using shearlets,” Opt. Commun., vol. 284, 981
no. 6, pp. 1540–1547, 2011. 982
[8] Q. Zhang and B.-L. Guo, “Multifocus image fusion using the non- 983
subsampled contourlet transform,” Signal Process., vol. 89, no. 7, 984
pp. 1334–1346, 2009. 985
[9] Y. Chai, H. Li, and X. Zhang, “Multifocus image fusion based on 986
features contrast of multiscale products in nonsubsampled contourlet 987
transform domain,” Optik-Int. J. Light Electron Opt., vol. 123, no. 7, 988
pp. 569–581, 2012. 989
[10] H. Zhao, Z. Shang, Y. Y. Tang, and B. Fang, “Multi-focus image 990
fusion based on the neighbor distance,” Pattern Recognit., vol. 46, 991
pp. 1002–1011, Mar. 2013. 992
[11] S. Li, X. Kang, and J. Hu, “Image fusion with guided filtering,” IEEE 993
Trans. Image Process., vol. 22, no. 7, pp. 2864–2875, Jul. 2013. 994
[12] B. Yang and S. Li, “Multifocus image fusion and restoration with sparse 995
representation,” IEEE Trans. Instrum. Meas., vol. 59, no. 4, pp. 884–892, 996
Apr. 2010. 997

IEEE P
roof
16 IEEE TRANSACTIONS ON IMAGE PROCESSING
[13] Y. Liu and Z. Wang, “Simultaneous image fusion and denoising with998
adaptive sparse representation,” IET Image Process., vol. 9, no. 5,999
pp. 347–357, 2015.1000
[14] M. Nejati, S. Samavi, and S. Shirani, “Multi-focus image fusion using1001
dictionary-based sparse representation,” Inf. Fusion, vol. 25, pp. 72–84,1002
Sep. 2015.1003
[15] Q. Zhang and M. D. Levine, “Robust multi-focus image fusion using1004
multi-task sparse representation and spatial context,” IEEE Trans. Image1005
Process., vol. 25, no. 5, pp. 2045–2058, May 2016.1006
[16] K. Kodama and A. Kubota, “Efficient reconstruction of all-in-focus1007
images through shifted pinholes from multi-focus images for dense light1008
field synthesis and rendering,” IEEE Trans. Image Process., vol. 22,1009
no. 11, pp. 4407–4421, Nov. 2013.1010
[17] S. Li and B. Yang, “Multifocus image fusion using region segmentation1011
and spatial frequency,” Image Vis. Comput., vol. 26, no. 7, pp. 971–979,1012
2008.1013
[18] H. Li, Y. Chai, H. Yin, and G. Liu, “Multifocus image fusion and1014
denoising scheme based on homogeneity similarity,” Opt. Commun.,1015
vol. 285, no. 2, pp. 91–100, 2012.1016
[19] Y. Zhang, L. Chen, Z. Zhao, J. Jia, and J. Liu, “Multi-focus image1017
fusion based on robust principal component analysis and pulse-coupled1018
neural network,” Optik-Int. J. Light Electron Opt., vol. 125, no. 17,1019
pp. 5002–5006, 2014.1020
[20] Y. Liu, S. Liu, and Z. Wang, “Multi-focus image fusion with dense1021
SIFT,” Inf. Fusion, vol. 23, pp. 139–155, May 2015.1022
[21] S. Pertuz, D. Puig, M. A. Garcia, and A. Fusiello, “Generation of1023
all-in-focus images by noise-robust selective fusion of limited depth-1024
of-field images,” IEEE Trans. Image Process., vol. 22, no. 3,1025
pp. 1242–1251, Mar. 2013.1026
[22] S. Li, X. Kang, J. Hu, and B. Yang, “Image matting for fusion of1027
multi-focus images in dynamic scenes,” Inf. Fusion, vol. 14, no. 2,1028
pp. 147–162, 2013.1029
[23] Y. Chen and W.-K. Cham, “Edge model based fusion of multi-1030
focus images using matting method,” in Proc. IEEE Int. Conf. Image1031
Process. (ICIP), Sep. 2015, pp. 1840–1844.1032
[24] H.-Y. Lin and C.-H. Chang, “Depth from motion and defocus blur,” Opt.1033
Eng., vol. 45, no. 12, p. 127201, 2006.1034
[25] P. Favaro and S. Soatto, “A geometric approach to shape from defocus,”1035
IEEE Trans. Pattern Anal. Mach. Intell., vol. 27, no. 3, pp. 406–417,1036
Mar. 2005.1037
[26] P. J. L. van Beek, “Edge-based image representation and coding,”1038
M.S. thesis, Dept. Electr. Eng., Inf. Theory Group, Delft Univ. Technol.,1039
Delft, The Netherlands, 1995.1040
[27] G. Fan and W.-K. Cham, “Model-based edge reconstruction for low1041
bit-rate wavelet-compressed images,” IEEE Trans. Circuits Syst. Video1042
Technol., vol. 10, no. 1, pp. 120–132, Feb. 2000.1043
[28] J. Canny, “A computational approach to edge detection,” IEEE Trans.1044
Pattern Anal. Mach. Intell., vol. PAMI-8, no. 6, pp. 679–698, Nov. 1986.1045
[29] J. Guan, W. Zhang, J. Gu, and H. Ren, “No-reference blur assessment1046
based on edge modeling,” J. Vis. Commun. Image Represent., vol. 29,1047
pp. 1–7, May 2015.1048
[30] H. Mir, P. Xu, and P. van Beek, “An extensive empirical evaluation1049
of focus measures for digital photography,” Proc. SPIE, vol. 9023,1050
p. 90230I, Mar. 2014.AQ:1 1051
[31] S. Pertuz, D. Puig, and M. A. Garcia, “Analysis of focus measure1052
operators for shape-from-focus,” Pattern Recognit., vol. 46, no. 5,1053
pp. 1415–1432, 2013.1054
[32] M. Subbarao and J. K. Tyan, “Selecting the optimal focus measure1055
for autofocusing and depth-from-focus,” IEEE Trans. Pattern Anal.1056
Mach. Intell., vol. 20, no. 8, pp. 864–870, Aug. 1998.1057
[33] P. D. Kovesi. MATLAB and Octave Functions for Computer Vision1058
and Image Processing. [Online]. Available: http://www.peterkovesi.com/1059
matlabfns/AQ:2 1060
[34] J. Wang and M. F. Cohen, Image and Video Matting: A Survey. Breda,1061
The Netherlands: Now Publishers Inc., 2008.1062
[35] J. Wang and M. F. Cohen, “Optimized color sampling for robust1063
matting,” in Proc. IEEE Conf. Comput. Vis. Pattern Recognit. (CVPR),1064
Jun. 2007, pp. 1–8.1065
[36] A. Levin, D. Lischinski, and Y. Weiss, “A closed-form solution to natural1066
image matting,” IEEE Trans. Pattern Anal. Mach. Intell., vol. 30, no. 2,1067
pp. 228–242, Feb. 2008.1068
[37] H. Li and K. N. Ngan, “Unsupervized video segmentation with low1069
depth of field,” IEEE Trans. Circuits Syst. Video Technol., vol. 17, no. 12,1070
pp. 1742–1751, Dec. 2007.1071
[38] Z. Liu, W. Li, L. Shen, Z. Han, and Z. Zhang, “Automatic segmentation 1072
of focused objects from images with low depth of field,” Pattern 1073
Recognit. Lett., vol. 31, no. 7, pp. 572–581, 2010. 1074
[39] A. Levin, A. Rav Acha, and D. Lischinski, “Spectral matting,” IEEE 1075
Trans. Pattern Anal. Mach. Intell., vol. 30, no. 10, pp. 1699–1712, 1076
Oct. 2008. 1077
[40] P.-S. Liao, T.-S. Chen, and P.-C. Chung, “A fast algorithm for multilevel 1078
thresholding,” J. Inf. Sci. Eng., vol. 17, no. 5, pp. 713–727, 2001. 1079
[41] [Online]. Available: http://mansournejati.ece.iut.ac.ir/content/lytro- 1080
multi-focus-dataset AQ:31081
[42] [Online]. Available: http://grail.cs.washington.edu/projects/ 1082
photomontage/ 1083
[43] Y. Liu, S. Liu, and Z. Wang, “A general framework for image fusion 1084
based on multi-scale transform and sparse representation,” Inf. Fusion, 1085
vol. 24, pp. 147–164, Jul. 2015. 1086
[44] Z. Liu, E. Blasch, Z. Xue, J. Zhao, R. Laganiere, and W. Wu, “Objective 1087
assessment of multiresolution image fusion algorithms for context 1088
enhancement in night vision: A comparative study,” IEEE Trans. Pattern 1089
Anal. Mach. Intell., vol. 34, no. 1, pp. 94–109, Jan. 2012. 1090
[45] G. Qu, D. Zhang, and P. Yan, “Information measure for performance of 1091
image fusion,” Electron. Lett., vol. 38, no. 7, pp. 313–315, 2002. 1092
[46] M. Hossny, S. Nahavandi, and D. Creighton, “Comments on ‘Informa- 1093
tion measure for performance of image fusion,”’ Electron. Lett., vol. 44, 1094
no. 18, pp. 1066–1067, 2008. 1095
[47] C. S. Xydeas and V. Petrovic, “Objective image fusion performance 1096
measure,” Electron. Lett., vol. 36, no. 4, pp. 308–309, 2000. 1097
[48] Z. Wang, A. C. Bovik, H. R. Sheikh, and E. P. Simoncelli, “Image 1098
quality assessment: From error visibility to structural similarity,” IEEE 1099
Trans. Image Process., vol. 13, no. 4, pp. 600–612, Apr. 2004. 1100
[49] C. Yang, J.-Q. Zhang, X.-R. Wang, and X. Liu, “A novel similarity based 1101
quality metric for image fusion,” Inf. Fusion, vol. 9, no. 2, pp. 156–160, 1102
2008. 1103
[50] Y. Chen and R. S. Blum, “A new automated quality assessment algorithm 1104
for image fusion,” Image Vis. Comput., vol. 27, no. 10, pp. 1421–1432, 1105
2009. 1106
[51] A. S. Malik and T.-S. Choi, “Consideration of illumination effects and 1107
optimization of window size for accurate calculation of depth map for 1108
3D shape recovery,” Pattern Recognit., vol. 40, no. 1, pp. 154–170, 2007. 1109
[52] L. Grady, T. Schiwietz, S. Aharon, and R. Westermann, “Random 1110
walks for interactive alpha-matting,” in Proc. VIIP, vol. 2005. 2005, 1111
pp. 423–429. 1112
Yibo Chen received the B.Eng. degree in electronic 1113
engineering from Tsinghua University in 2012. He is 1114
currently pursuing the Ph.D. degree with the Depart- 1115
ment of Electronic Engineering, The Chinese Uni- 1116
versity of Hong Kong. His research interests include 1117
image processing, computer vision and machine 1118
learning, and specifically for multi-focus fusion. 1119
Jingwei Guan received the B.S. degree in control 1120
science and engineering from Shandong University, 1121
Jinan, China, in 2013, and the Ph.D. degree in 1122
electronic engineering from The Chinese University 1123
of Hong Kong, Hong Kong, in 2017. Her current 1124
interests include computer vision and deep learning. 1125
Wai-Kuen Cham received the degree in electronics 1126
from The Chinese University of Hong Kong in 1979, 1127
the M.Sc. and Ph.D. degrees from the Loughborough 1128
University of Technology, U.K., in 1980 and 1983, 1129
respectively. From 1984 to 1985, he was a Senior 1130
Engineer with Datacraft Hong Kong Ltd. and a 1131
Lecturer with the Department of Electronic Engi- 1132
neering, The Polytechnic University of Hong Kong. 1133
Since 1985, he has been with the Department of 1134
Electronic Engineering, The Chinese University of 1135
Hong Kong. 1136