ical posi - hawthorne tech writer may 1987 technical symposium watkins-johnson company systems group...
TRANSCRIPT

ICAL POSI

21 MAY 1987
TECHNICAL SYMPOSIUM
WATKINS-JOHNSON COMPANY SYSTEMS GROUP
Miniaturization of VHF and UHF Receivers by Hybridization
Presented by Harmon W. Banning CEI Division
id Broad Band Signal Aquisition a New Tool
Presented by Allen L. Shapiro CEI Division
Calibration Techniques Enhance ESM System Performance
Presented by Dave Hawthorne ESM Division
Theory and Application of a O. 5 to 18. 0 GHz Tunable IFM Receiver
Presented by Ralph Williams ESM Division
Automatic Test Equipment for EW /ECM Equipment
Presented by Steve Adams SSE Division
Direction-Finding Displays Using Digital Techniques
Presented by David Z. Janich SSE Division ..
Computer Graphics for Three-Channel ~ction Finding Data
Presented by Philip O. Morse Special Projects Division
Spurious Signals: Specifications and Testing Procedures
Presented by Robert E. Watson Special Projects Division

CALIBRATION TECHNIQUES ENHANCE ESM SYSTEM PERFORMANCE
Presented by
Dave Hawthorne
Prepared by
Dave Hawthorne
WATKINS-JOHNSON COMPANY
HSM DIVISION
CALIBRATION TECHNIQUES ENHANCE
ESM SYSTEM PERFORMANCE
Electronic warfare support measures (ESM), electronic counter measures
(ECM) and electronic counter-countermeasures (ECCM) are the basic subdivi
sions of electronic warfare (EW). ESM involves actions to "search for, inter
cept, locate, and immediately identify radiant electromagnetic energy for the
purpose of immediate threat recognition. 111 Information prq4~ced by ESM
equipment can be used to initiate ECM , ECCM, avoidance , t;fgeting or other
tactical responses.
A fundamental requirement for an ESM system is "to .Jilrt the timely assessment of an enemy's intentions and position by interi~~ting and pro
cessing RF ~ffiissions as$p9:;a.ted with Iµ@ ope,#ijtions. 112 To: ;;tisfy this re-
~~r:;:n:~i :::t:Jll:::g:":roilt:Jl tt::::-11 b;e•c:i::~~·:: large ' mu!ti~\\\¥;,;,eceiver ,:!!~:•. A i%? .,,.•,,.·•.·,,• •• ,•.,.•',.,.,,•,,.•,,•, .• ,·.i·',, ',.',,,'',,.',,._,, .·', ':, ·,, ..•• .••. .. ,.·,,.·,,. ·,,. · •• . ·,,·,.,: ~',.·,,·,,.·:.·, •.• ,,· .. ·,, :,,,.·',.,.::':.·.·,,,.'',,.''•,.'',.,•',.,'',.,•,.a•.·,,•,,•.,,•.,•,, .• c'··,,.•., .• ,,.,,.,,.,.q'.·,:.·····.•.\.!u" ;1·····•s• ition. Regardless of !i~~ji!iw I~~ ~~lf~ffi I?:~ perform O o~+w Super-
heterodyne, crystal video, instantaneous frequency measurement (IFM) ,
channelized, microscan and acoustooptic receivers have been used for signal
acquisition. Each receiver type has its own inherent strengths and weak
nesses, as shown in Table 1. Selection of a receiver type is critical to the
development of an architecture for:. a specific application.
As the state of the art of receiving equipment has advanced, considerable
information has been compiled on the advantages and disadvantages of differ
ent receiver technologies. The debate continues as to which receiver type is
most desirable for ESM applications, for no single receiver is ideal for all
applications. Arriving at an optimal solution to a specific problem involves
-1-________________________ UJ •

Table 1. Features Comparison of the Principal Receiver Architectures
~ Wide-Band TRF Narrow-Band Wide-Band Acou.sto-Crystal Video Crystal IFM Superhet Superhet Channelized Microscan Optic
pe
Video e
Instantaneou.s 500- 10.000· 25 500-10,000 0.5-20 500 1280 250 soo Analysis Bandwidth (MHz) ·10 2 10 2 4 5 4 4
Frequency 500-10,000 2S 0.52-3 0.5-20 0.5-20 500 10 2 Resolution "
(MHz) .· I 3 9 8 6 8 9
Sensitivity (dBm) -46 to -84 -80 to -83 -37 to -80 -101 -87 -72 -90 -67 T-290°K 5 8 4 10 9 4 7 9 9
Dynamic 70-73 50-80 70 60 70 70 60 35 Range (DB) 7 5 7 6 7 7 6 4
Relative Speed 1 700 1 875 35 13.67 70 35 of Signal Acquisition 9 1 9 1 7 8 6 7
Short Pulse 40 75 40 50 40 100 500 8000 Width Capability (ns) 7 7 7 7 7 7 5 1
Measurable TOA, PW, PA RF, TOA, PW RF, TOA RF, TOA, PA RF, PW RF. TOA RF, TOA Signal SRI PA, SRI PA, SRI. PW PA, PW, SRI TDA, SRI, PA PW, SRI PA, SRI PW Characteristics 8 10 10 10 10 10 8 6
Exotic Signals ii> ii> "'· !J,.f ii> "'· !J.f ii>. !J,.f tJ.f.CW !J,.f
Applicable 3 3 6 3 6 6 6 3
High Signal Performance I 3 2 3 I 5 7 6
Simultaneous Signal Capability I 5 3 7 6 5 7 7
Processing Complexity 4 5 5 4 4 4 I 2
Immunity from Jamming I 5 I 9 3 2 7 7
Size (in3) s 53 1656 2500 1515 4320 1390 1900
9 2 3 2 3 I 3 3
Power (W) I.S 7. 1 320 ISO 12 1200 80 71 Requirements 9 8 4 5 8 I 6 6
Cost (SK) 20 50 75 125 100 2500 1300 133 8 7 7 6 6 I 3 6
*Upper number or letters are nominal receiver capabilities and lower number are relative EW /ESM ratings based on scale of 10 to I.
• ________ - 2_-_____ ~u
San Jose, California

consideration of performance requirements and parameters such as relative
system cost, size, weight, and reliability.
Tradeoffs in probability of intercept, response time, frequency coverage,
sensitivity, dynamic range, resolution, selectivity, and accuracy must be
considered in the selection of a receiver type. Frequently, the best approach
to an ESM requirement is the use of a hybrid architecture which incorporates
multiple receivers of different types, thus combining the strengths and
possibly overcoming the weaknesses of the individual receivers.
In order to manage the multiple resources of a hybrid ESM s_ystem and to
attain the maximum performance from a system at a reasonabl~ .cost , computer
control is required. Computers are also required to procJgJ the data ac
quired by a large system to produce useful information abq:µJ the environ
ment. Using embedded microprocessors in the RF distribu!&J and tuners,
and single board computers for system control, signal proce$.$Wg and display
generation, results in a powerful, cost effective architecturei f
;:;;;::I~~l=:1:;::~l:;:~::1
:;jlJ;7jf l~:~:~~::Jl:;:~~:·:::~ ;~: • st:::::•·~--~·iiirl1!::::i!iliiif t~J;08:o!::o:~:~ system . complements the hybrid receiver architecture, resulting in system
capabilities superior to those achieved without calibration.
This paper shall consider a hybrid ESM system architecture, and discuss the . calibration techniques that can be appliecf to enhance system performance.
Although the techniques are discussed i~ the context of a particular archi
tecture, the techniques can be readily applied to other systems with similar
requirements. The hybrid architecture utilizes a scanning IFM and a set of
narrowband superheterodyne receivers under computer control. Such equip
ment is currently produced by the ESM Division of Watkins-Johnson Company
in San Jose, California.
-3-_______________________ UJ •

BLOCK DIAGRAM
Figure 1 presents the block diagram of a hybrid ESM system. The system
combines a tunable IFM with a bank of narrowband superheterodyne receiv
ers. The system shown in the figure is based on standard receivers and
utilizes typical signal distribution, processing and control hardware. The
components that comprise the hybrid ESM system shall be described in the
following paragraphs.
The tunable IFM is a high probability of intercept receiver which performs
rapid search and simultaneous signal processing to interqept, detect, mea
sure, analyze and report signals found in the environment. The architecture
of the tunable IFM is different than conventional IFM's, fgi is discussed
below.
OMNI ANTENNAS
y y . . . y I INPUT SWITCH I CONTROL
I I ..... ..... ... GPIB
RF DISTRIBUTION ·1 AUX
RF IF RF RF RF
TN-122 TN-218 I+-TN-218 CONTROL TN-218
TUNER ~
TUNER TUNER TUNER . . . lIF lIF lIF lrF
r---+ IFM MD-100· I+-
MD-100 CONTROL MD-100 DEMOD DEMOD DEMOD . . . DEMOD
IF 1 lVIDED IF lvrDEO IFl lVIDEO
I SWITCH ASSEMBLY I I
IFM VIDEOS THRESHOLD SELECTEDl SELECTED ! VIDEOS IF VIDEO
TTL CONTROL TTL CONTROL TUNER CONTROL VIDEO PROCESSOR AND
CONTROLLER TUNER CONTROL GPIB
87. R.1142
Figure 1. Hybrid ES Sys Block Diagram
•
-------------~~ San Jose, California

The bank of superheterodyne tuners are used for both signal acquisition and
automatic or manual analysis. The tuning accuracy, selectivity, and sensitiv
ity of these tuners provide capabilities that augment the basic IFM system.
The number of tuners incorporated into such a system architecture is dictat
ed by the requirements of the application. The concept of the hybrid ESM
architecture has been implemented with a single narrowband tuner, as well
as with multiple sets of superhet tuners.
CONVENTIONAL IFM RECEIVER
An IFM, or Instantaneous Frequency Measurement, receiver is defined as a
"receiver with a wide acceptance bandwidth which determines frequency from
phase information in power split signal components traversµi.g unequal path
delays. 113 A block diagram of a conventional IFM receiving ~;stem is shown
in Figure 2, The receiver consists of an antenna connected to a hybrid
power splitter, a delay line in one of the signal legs, a p~lt~\e discriminator
and display. The principle of the IFM operation is to introdll¢e a time delay
in one of the splitter outpllts which translates to a phase diit~rence between
the compone#tS which is <fj#oportional t§ freqij~l'lCY. 4 The llase difference
can be mea$;tired by daegc······r·.al······.·.· .. ·e.·.•.··.·./···1····.·0··b····· .. sr.ateTdhephda
1.
8s .... •.·.·.rt·e·;··.·.· .·.·.•
1·.·.•.•.•a.•.•.· .. dyiesdck .. : .. : ..•.. 1 .. L.•.•.m.•.•.•n:•.• .. • .. •.1.·.gnlaetor and !i§played as an angle from Q\to 360 i:,, a indicat,; dhe frequency
offset of thJ~iinal with~~~T band 0{1IJ IFM,i:t,
87.R.1131
111 CROWA VE PHASE OISCRl~INATOR
UA E -r-,.-----------1 LAW I OU A ORA !URE COUPLERS !DETECTORS I & PHASE SHIFTERS I
I PASSIVE STRIPLINE II I NE TlfORK L ____________ ..J _ _,
RF SI GNH PROCESS ING
VIDEO DETECTION
DIFFERENTIAL AMPLIFIERS
Figure 2. Conventional IFM Receiver
-5-
---------------------- UJ •

Figure 3 shows a basic phase discriminator. The phase discriminator accepts
two inputs which are derived from a single RF signal, using the power
divider and delay line. The two outputs of the phase discriminator are
proportional to sin 0 and cos 0 , where 0 = 2 7T f ~ L / c. 0 is the phase angle
between the two inputs, ~ L is the difference in path lengths to the inputs of
the phase discriminator and c is the propagation velocity of the wave m the
delay lines. As the two input signals are of equal amplitude, the ratio of the
output voltages equals the tangent of the phase angle between the two
components.
If the sine and cosine outputs of the phase discriminato·r are applied to the
X and Y inputs of an X-Y monitor, the displayed vector will have an angular
displacement equivalent to the phase angle 0. This angle can be interpreted as
the signal frequency since a fixed time delay in one of the phase discrimina
tor inputs translates to a linear phase change over frequency within the
bandwidth of the discriminator. The unambiguous frequency range, or
mkA 2
c =-2 cose
= SIGNAL Acosr/1 INPUT
PASSIVE STRIPLINE NETWORK
87.R.1132
Figure 3. Phase Discriminator
•
-----------6---------~u San Jose, California

bandwidth, of the discriminator is determined by the delay line length. The
phase angle will rotate through 360 degrees for each octave frequency
change. The nominal frequency of the discriminator is given by the equation
fo = c/ AL = 1/T
where T is the difference in the path delay times.
TUNABLE IFM
As indicated by Table 1, IFM receivers exhibit many favorable characteristics
for ESM applications. IFM's have a wide instantaneous analysis bandwidth
resulting in a high probability of intercept, very good dypamic range to
allow operation in environments with signals of vastly different strengths,
high signal acquisition speed and the ability to handle exqt}P signal types.
These characteristics make the IFM attractive for many appH!l~ions.
On the other J1and, the I;F'.l\1 receiver typically has poor sed~i.iivity, average
frequency Jli1ution, de!t:ided perfor&IJce ifi [environmen1it tr high signal
:;:;~ty~g:n11t:::::g1:l::t: ~::11~;u:r,r:::: ;: 1~=~ t:: j;:~ ::: ::::::511;;;.tll;~;,1,t:~::~1~\,,:a;:::; :::: but limited, ra~gJT F~r broadbti:rid applications, it bth~mes necessary to
operate multiple IFM's in parallel to achieve the required coverage.
The tunable IFM concept was developed at Watkins-fohnson Company to
partially overcome the shortcomings of t~e conventional IFM. By placing a
wideband tuner in front of an I:FM demodulator, the frequency coverage of
the conventional IFM can be expanded without incurring the cost increase
associated with distributing input signals to multiple IFM's and correlating
the various outputs. The TN-122 tuner shown in Figure 1 is swept across
the spectrum at a rate of up to 40 GHz per second, allowing coverage of a
very wide range in a short time. The TN-122 also supports 500 MHz of
instantaneous bandwidth, to maintain a high probability of intercept under
high scan-rate conditions.
_____________ -_1-_________ UJ I
•

As the TN-122 scans the environment , the IFM demodulator produces log and
FM video signals from the 1 GHz IF of the tuner. The IFM demodulator
actually contains two phase discriminators, with different delay line lengths,
as shown in Figure 7. The addition of the second phase discriminator im
proves the effective resolution of the tunable IFM.
The outputs of the IFM demodulator are digitized and processed by circuitry
in the Video Processor and Controll~r unit. The computers contained in the
unit automatically an[:!lyze the data, deinterleave pulse trains, determine
signal characteristics, identify signals and output results. In addition, .. processing techniques have been developed to handle high environmental
densities, exotic signals, CW and high duty cycle signals. :J;'pe tu~able IFM
also has the ability to automatically switch to a narrowband mode in high
density areas, or at operator request.
The performance characteristics of the tunable IFM are:
Wide Instantgn~ous Analys[i{Bandwidth: }
High FrequiJl Resolutiol! )((((
Good SensittJi~~k .
Wide Dynamic Range: 60 dB
High Speed of Acquisition - less than 0.5 seconds in 0.5 to 18 GHz range
for continuously detectable signals
SUPERHETERODYNE RECEIVERS
Although the tunable IFM represents a cost effective solution to the problem
of providing high probability of intercept and rapid acquisition time, it does
not perform as well as a narrowband superheterodyne tuner in the areas of
frequency resolution, sensitivity, high density en vironment performance,
simultaneous signal processing or im uni "amming. The narrowband
• _____________ ·wu San Jose, California

superhet exhibits high selectivity and can be tuned to a signal frequency
with high accuracy when local oscillators are synchronized to a system
reference. This allows collection of signal parameter data necessary for
detailed analysis of emitter characteristics.
The TN-218 tuner is a digitally controlled, single conversion, super
heterodyne tuner. According to the IEEE definition, super heterodyne recep
tion is a "method of receiving radio waves in which the process of hetero
dyne reception is used to convert the voltage of the received wave into a
voltage of an intermediate, but usually superaudible, frequency that is then
detected." Heterodyne reception (beat reception) is defined as "t:tie process
of reception in which a received high frequency wave is combined in a
nonlinear device with a locally generated wave, with the result that in the
output there are frequencies equal to the sum and difference of the combin
ing frequencies." The TN-218 converts frequencies in the 2 to 18 GHz
range to an intermediate frequency of 160 MHz. The IF ol1.tput is detected
and processed downstream.
. :(<>.:> \: ::· · ,: Detailed analysis through a narrowband superhet channel takes time, and in
dense environments multiple tuner channels b~come a necessity. Combining
the tunable IFM with multiple superhet .iUners ;ekults in a system which can
continuously monitor the environment with an ~~tremely htgh probability of
intercept, while <pe'I'forming. autom1tic; detailed ;rii1'#:~¥~ <()f previously inter
cepted signals. This is accomplished by initially scanning all receivers (IFM
and superhets) against the environment and automatically assigning super-. hets to the task of analyzing encountered signals as required. Tuner assign-
ments are determined by the controller unit base~ on operator inputs, signal
intercepts, relative signal priorities and available resources.
For the system to operate effectively, it is essential that the controller have
the ability to transfer, or handoff, signals from an intercepting receiver (be
it IFM or scanning superhet) to an analysis receiver quickly and accurately.
-9-
.-
•

In order to optimize this process, calibration techniques have been developed
to correct for tuning inaccuracies caused by the properties of the individual
receivers. These calibration techniques will be discussed below, in the
context of the architecture shown in Figure 1.
RF DISTRIBUTION
Inputs to the system are received through omnidirectional antennas, which
are selected to cover the frequency range of interest. The antenna outputs
are connected to an - input switch unit, which allows the antennas to be
disconnected from the system and provides for proper termination of input
lines when in the disconnect state. The input switch unit is required for
calibration , as the antennas must be disconnected for prop¢r results. The
input switch unit is controlled by the RF Distribution unit in response to
commands from the Video Processor and Controller unit.
••••••••••••••••••••
The RF Distribution unit is designed to accept signals in J~8h of the input
bands determined by the antenna array. A block diagram of}tlie RF Distribu-
:::w: i:h:J.t:a;:r;oj!ith:.::•:;r Ji;t;~ll::s ~:1:Jlllh:~:\:::d~: preamplified~ t and convert,il. if necesi~i:ir. t~ ihe frequen~~ >range of the
tuners . Aft~t £Onversio1}; fij~ signals >~f~ split i9 each of JP-~ channel selec
tor switches. ''fp.$ijg ,i:;wjh:fh4$ iU9W ,~ijc,itf tuner td AP~r~t~ grj §ignals in any of
the input band;, 1HaJS~~dent ar iH~ .,~,~her tuner~. ¥Bi 'Bui~uts of the chan-
nel selector switches are connected to the tunable IFM and the bank of
narrowband, super heterodyne tuners.
Also pictured in Figure 4 is a comb generator circuit. As will be discussed
later, the comb generator is used during the calibration procedures to
generate signals at known frequencies (every 100 MHz ). The comb signal is
generated by amplifying the output of a 100 MHz voltage cont rolled oscillator
(VCO) and applying the signal to a step recovery diode (S RD ) . The nonlin-
ear transfer fu nction of the SRD resll.!. s in
the or iginal 100 MHz signal. The spectra: as comb- like appearance -hen vie ed
co b generator .
e generation of harmonics of
of t he harmonics has a
analyzer, hence the name
•
-------------~u San Jose, California

-
ANTENNA C>--INPlJT )--- --- --- ! --·
(TYPICAL}
AUX ff
GP1B
87.R.1133
COMB
S WIT C tt CONT AOL
OOHNCONVEATEA (AS AEGILJ11-1 E OJ
COMB
DIST
- OIVIDEA
-_ . -•
"TO OHIE R INPUT BANOS
FROM -. + ~!~!5~ _. SWITCH
CHANNE L 1 ·• OUTPUT
FROH -. EJ-WITCH -~ Cli0AUN1NPF.U\ 2 OTHER • S ANDS-·
SWITCM -_, CHANNEL N
oun:iur
Figure 4. RF Distribution Block Diagram
A transfer ilil\iitch and $\fl{r located <!fti\r t1\l!II SRD are Jllded to allow selection of i ! $ingle comb/!i J;quency. T;; Juseftj~less of the r,4J~r will become
::a:::e:nil~::;:r:e:Jlct::e t:r::lt :lf in:~t:::~tlt:::t;:::~ ator is not ·iii use, th&. 'VCQ • .. Js dislib)~d, prJ¥!~tiHK J.~~iii~ of the comb
frequencies in~6>twi ~Ii:1 ;:tH1I >
An auxiliary IF input is provided for calibration of the tunable IFM. The aux "
IF signal is used as an additional input to the first channel input selector
switch. This allows the aux IF signal _to be connected to the input of the
first super heterodyne tuner.
The RF Distribution is under microprocessor control . The microprocessor
communicates over an IEEE-488 instrumentation bus ( GPIB) with the system
controller. Control of the comb generator and switches in the unit, as well
as the Input Switch unit, is exercised by the microprocessor.
-11- •

TN-218 TUNER
The selected RF signal from the RF Distribution unit is input to the TN- 218
tuner. The TN-218 is illustrated in Figure 5. The input signal passes
through a YIG-tuned filter to a mixer. YIG (Yttrium-Iron-Garnet) crystals
are used as the tuning elements in many devices, because of the material's
high Q resonance characteristics. 5 The YIG oscillator and filter shown in
the figure are examples of such devices. The filter, or preselector, is a six
stage device with an instantaneous banclwidth of between 20 and 70 MHz,
depending on the tuned frequency.
The preselector is under the control of the microprocessor, which generates
the appropriate digital tuning words for each frequency. 'rp~ tuning words
are converted to an analog voltage by a digital to analog converter (DAC).
The preselector driver converts the tuning voltage to a \ qµrrent, which
actually controls the magnetic field within the device. YIG ffit~rs · are highly
linear , magnetically tuned devices. The resonant frequency jti}/ a YIG sphere
is directly p:r.9portional to the magnetic field which surround~ it. 6
F<F ltJPU T >-- --t~~E;_~- f - •~ ~~[>----------~IF OU TPUT
VEFI P AD ~L L --- AMP LIFIER AMP LIFIER
- - --------,
----- •-----· -- -~ LO SAMP LE
OIVIOER
RE~;:,~cE )- - - ----· -------·-- SYNCHR ONI ZER., _ ___ ~
,,,,,,,,,,,,,, I
DAC I C~,::~L ;-.!-------------------------~
87.R.1136 Figure 5. TN-218 Tuner Block Diagram
• _ ___ _______ -_12_-_______ UJu
San Jose, Cali forni a

A mixer is used to combine the RF signal with a local oscillator signal (LO)
to produce the desired intermediate frequency, or IF, signal. The IF fre
quency is fixed at 160 MHz, which greatly simplifies the process of amplifica
tion, filtering and detection. Changing the tuned frequency of the receiver
is accomplished by controlling the frequency of the LO signal. As the LO
frequency is changed, the preselector is made to track the tuned frequency
of the receiver.
The conversion from RF to IF in the mixer is a non-linear process in which
new frequencies are generated and added to the two input frequencies. The
first sidebands, or sum and difference frequencies, are generally used as
the IF signal, such that
fIF = fLO ± fRF'
In the TN-218, the IF is 160 MHz, and the input frequenc}'\,ange is 2 to 18
GHz. The LP/ tunes from Zi 16 GHz to ')..$.16 Qfflz to cover fffl s range. The
:~:~tu::~ch1:::~·:::he~Y111d ::I::~:~Jif ~:tlf :o;~:::~f lt:':~u~~:: ~~
Ps1~gonvailde1· s thacec)/:oli tm•_-._,_•_•_o_._•,_•p•._',,•li· __ ·.· ..• fs .. _.r,h_._.e_.e.q_.d. u._., ..... •e,_·,-,u_·_·.n_,_·•.•s•,-.c_._i_.1·.•.1_:;ne./gs_•_._••.·. . .,,;:;,,,,., , ··.· .,,,•,•,•,•;:;•,:;; .-;:,,,,,,;:;,_,,,.,.· lh~ §PPT iJwitch ti~:i:J,~,r rnJ9rpfizj6~essor control.
The microproc;;~d,ii ~1§6/ co~f±-61; fh~ >~uned fre~iilrid;, 8¥\ the YTO via the
DAC and YIG driver circuit.
A second input to the YIG os.cillator is generated by a synchronizer. The
synchronizer is enabled by the . microprocessor in the ,.fixed frequency or
manually-tuned mode to improve tuning · acc;:uracy. The synchronizer samples
the LO signal and phase locks the frequency to an external, crystal refer
ence frequency. With the synchronizer active, the tuner may be tuned in 100
kHz steps with accuracies determined by the external reference. Typical
synchronized accuracies are 1 part in 108 . Under scanning conditions, the
"open-loop" tuning accuracy is 30 MHz, maximum.
-13-
.-
•

The open-loop tuning errors encountered with YIG-tuned receivers can
significantly affect the performance of ESM receivers. The accuracy and
repeatability of frequency measurements as well as the speed with which a
receiver can "set-on" an intercepted signal are directly determined by the
tuning accuracy of the receiver. The factors which influence tuning accura
cy, and the techniques which may be used to improve tuning accuracy will
be discussed in a subsequent section of this paper.
Following the mixer, the signal encounters amplifiers and a digitally con
trolled attenuator. The amplifiers are required to supply the desired RF to
IF gain, and the attenuator is used for automatic noise leveling. The auto
matic noise leveling function (ANL) is an automatic, calibr~ted response of
the microprocessor to changes in tuned frequency. The ANL feature allows
the tuner to maintain a constant noise level at its output, independent of
gain or noise figure variations of the system across the bati(i. The ANL is
important in small and large ESM systems to optimize detecti~h thresholds for : · .-: ·.
high probability of intercept for weak signals while minimj iing false alarm
;;~s ~:c::lt•::nt::;•IL~~:~ro:jfl::ru11i:t:::.:: •••••••••••••••••••• st &tus information
c:Sri.f ains lines for
tuned frequJrie_ .• •.·••.J .... ... ".··.• ...... tu11~r.·•••.•• ~dd;pe§sir1_.g_._.;._? tiining irlride~ hysN~i'~iis, phase lock ••••c<>a· l1'brat1'on ( d\a·••.ft •. ••. ••.•. ·ar _ .••.•..•. _ ••.••... •.•••.•._•c/o)nt tfr?o· l. The parallel indication, R~ bl~h)k.fri~\ r;JJtU ~rid
control interface allows multiple tuners to be controlled over a single bus.
Each tuner microprocessor is capable of receiving and executing commands
every 100 microseconds.
The performance characteristics of the TN-218 are summarized in Table 2.
MD-100 DEMODULATOR
The MD-100 demodulator provides the functions of IF filter selection and
video detection. The unit contains selectable IF filters which set the receiver
bandwidth from 1 to 20 MHz . The output of the selected filter is power
divided , and sent to both a buffer amplifier and a log detector amplifier.
• ________ -_--_____ ·U.Ju San Jose, California

The buffered signal is routed to a connector and used as an IF output to
the switch assembly.
The log detector produces a video output that is proportional to the log of
the amplitude of the IF signal envelope. The log amp is commonly used in
ESM systems to produce pulsed video signals, as the log amp can detect
signals covering a dynamic range of up to 60 dB.
The demodulator is controlled using dedicated TTL control lines. These lines
allow selection of IF filters by the controller unit.
SWITCH ASSEMBLY
The switch assembly contains a set of IF and video s witches t o select t he
output of one of the superhet receivers for processing or}:giµibration . The
switch assembly is under TTL control of the controller unit.if :
Table 2. TN-218 Tuner Functional PerformaJI /
RF Input I~/idance:
.. .. ::;rtr:m;
5~ ~hms l!fuinal
RF Frequen¢j1j~
IF Frequenci&I\ 1!6 MHz Hdfuinal
RF BandwidttlS:> ,. : :.... ••/ :Ii MHz mihtMum Frequency Acc~:i8Y: t n···· ···?•••••••<•>•••<t>(io MHz typ~~!1\ Iitt ··
(Non-Synchornized): 30 MHz maximum
Incidental FM:
Step Size:
Image Rejection:
Lo Radiation :
1 dB Input Compression Point:
Third-Order Input Intercept Point:
25 kHz typical
40 kHz maximum
100 kHz nominal
80 dB typical
60 dB minimum
-90 dBm typical
-80 dBm maximum
+5 dBm typical
0 dBm minimum
+ 10 dBm typical
+5 dBm minimum
-15-_ ____________________ lU San Jasie.
•

TN-122 TUNER
The tunable IFM incorporates a TN-122 wideband tuner, which covers the
0.5 to 18 GHz range and supports a 500 MHz instantaneous bandwitdh at an
IF of 1 GHz. Performance specifications for the TN-122 are shown in Table
3.
The block diagram of the TN-122 is shown in Figure 6. The unit is a digital
ly controlled, dual conversion , super heterodyne tuner. RF inputs pass
through an input -· filter/switch assembly to route the RF energy through
either a low-band channel (0.5 to 8.0 GHz) or a high-hand channel (8.0 to
18.0 GHz).
In each channel the signal encounters a mixer, used to perform the first of
two conversions. The first local oscillator is a YIG-tuned GaAs FET oscilla
tor. For signals in the low-band channel the first LO swelpij• from 10. 5 to
18 .5 GHz, producing a constant IF output of 10 GHz. T~ij )!ll rirst LO must
make two sweeps to convert all frequencies in the high-baril channel. The
first sweep Jl~vers signaii between 8 iii 14 :\gllz, where ttil\ LO is always
!~q~::ci:!1F!:h:4 t::e~~if lt~~e:;:~ JTite:11{:::;pt:::lt+t~e :::~::: the tuned f;i;uency Thti<lroduces a ij~hstan~iit)f output atm\J\~ 5 GHz for all inputs betwe~w:1•••:•• ,n~•··••·1~ /:a~•i.•~:: ... , •••••......... ·.·.·
The first LO is controlled by the unit microprocessor. The microprocessor
produces tuning words that are converted to a tuning voltage and finally to
a coil current, as described for the T N-218 tuner. This tuner utilizes a dual
conversion scheme, however, to cover the range from O • 5 to 18 GHz, as
opposed to the single conversion architecture of the TN-218.
The first local oscillator is not synchronized, as is the TN -218 tuner. The
tunable IFM is normally used as a scanning receiver, because of its high
probability of intercept and because the narrowband superheterodyne tuners
provide set-on and manual tuning capabilities. The synchronizer is not
• ___________ -_is_-_______ UJu
San Jose, California

87.R.1134
B. 4 GHZ LP FILTER
LOW-BAND CHANNEL 0. :5 ro 8 GHZ
HIGH-BAND CHANNEL 8TD1BGHZ
Figure 6. TN-122 Tuner Architecture
_I'..........__ -t i GHZ If ~/- -- OUTPUt
useable in J!j~!.t scan moli['ibecause of l.i t!Jlilqulred fJl!I. loop to lock up at each $tip. The TN+ti2 , thereforif does• bbt contain J ~}nchronizer in
this ap P]IC·~~ . . •.• •. ·.•·.•o••·.·.··.·.•.•s•.··.··.•.;.o,.·.•.·.··.·.···"•j··1·••.·1·•· .. ·atttolir! 'l,tihro•••.uw·······.·······.·,,. .. • .. •.·.•.· ... ·v.·.·.··.· .. •.· .. •.·.·e·.··.· .. •.t.· •. •••.·.·.: .. • .. • .. •,•-!i 111 ; IIlh. <1,lll!)i The second l=~~l ~~ ~ ·~·· f~i a diele!tjil iji,Bt~f\~~~, phase-locked
oscillator with a fixed frequency of 4 .5 GHz. This frequency is used to
convert the 3.5 GHz signal from the high-band mixer to a final IF of 1 GHz . . The 4.5 GHz LO is also doubled to 9.0 GHz for use in the second conversion
of the low-band signals from 10 GHz to 1 GHz.
The output of either the low-band or _high-band channels is selected through
the SPDT switch, and amplified before being output to the IFM Demodulator.
The TN-122 is controlled by the internal microprocessor. The microprocessor
communicates with the Video Processor and Controller unit over a parallel
control interface similar to the one used for the TN-218 tuners.
-17- •

Table 3. TN-122 Tuner Functional Performance
Input Frequency Range
IF Output Center Frequency
RF To IF Bandwidth (3 dB)
Step Size (minimum)
Noise Figure
RF To IF Gain
Input 3rd Order Intercept Point
Input ldB Compression Point
Single-Sign~} ~pur Free J:?ynamic
Range
0.5 To 18 GHz
1.0 GHz
500 MHz Nominal
500 kHz
23 dB maximum O. 5 To 18 GHz 16 dB typical O .5 To 8 GHz 18 dB typical 8 to 18 GHz
15 dB typical, Higher Gain Optional
0 dBm minimum +5 dBm typical
-7 dBm minimum -5 to O dBm typical
57 dBm>minimum
~·~ :aBmt~;pical
Image Rejectiqp. .:::.::::::::·:.
LO Radiatio~ > .11~~dl;::u~~ dBmjli\ical
'''1Ii!@rn mtii!Tif ~~~/~h::4tra:ii\t };;cal Size
Weight
IFM DEMODULATOR
7.44 inches x 19.65 inches x 4. 94 inches (AlD)
25 pounds
The IFM Demodulator processes the 1 GHz IF to produce log video and
discriminator outputs from which the amplitude, time of arrival and frequen
cy of the signal can be measured. The block diagram of the unit is shown in
Figure 7.
•
-------------~u San Jose, Ca lifornia

~
i E
I .... ~ I
•
1 GHz IF INPUT DIGITALLY ---••~I CONTROLLED
ATTENUATOR
SPOT SWITCH
1 GHz CENTER FREQ. 500 MHz BW
IF LIMITING AMP
87.A.8821
SPF
oo
INI "-.
goo IN
goo
oo
SPOT SWITCH
LONG DELAY
1 GHz CENTER FREQ. 500 MHz BW
BPF
oo-oo
LINE........_. STRETCHER
IF
LINE
IJ1111u~"'" ~o
~ goo
goo
14.56 nsec
oo
I 0°
LINE .___. STRETCHER
Figure 7. IFM Demodulator Block Diagram
LOG AMP
LIMITED IF OUTPUT
LOG VIDEO
OUTPUT
50 MHz BW
VIDEO AMPLIFIER
,..., COURSE
Sin (21rftd)
COURSE Cos (21rftd)
~
,._
FINE Sin (21rftd)

The 1 GHz IF input from the TN-122 tuner is applied to a digitally controlled
attenuator, which is used for the automatic noise leveling function as de
scribed for the TN-218. The attenuator is controlled using TTL lines from
the controller unit to vary the IF gain of the unit, maintaining a constant
noise floor at the detectors .
The output of the attenuator is connected to a pair of switches that allow a
30 MHz bandpass filter to be _switched into the signal path. This filter allows
the tunable IFM to switch to a narrowband mode for response to CW signals
and dense environments, overcoming the problem of . simultaneous signal
processing in the IFM.
The signal is then filtered to set the 500 MHz bandwidth the IFM. The
output of the filter is connected to a log detector amplifier , .. >which produces
the log video voltage. A limited IF signal is a natural bypf§~uct of the log
detection process' and this output is used by the discriminatb:is.
The limited lit' signal is fj@(}l.er limited M/@id IQtW'ed again. II~ limited IF is
then power (U'tided, and 4~itributed to f#o d&lii line disc~tffl~nators. These
discriminatoi~ measure ttlj phase diffetl#.ce oltleen delayed Jnd undelayed
::~n:e1:::~1;: ~o T:~.,1;::·~;;:t,~~:;!la::,:h:a#l!1:d t:0
:::: ::
the circuit de;dHBi! fri ;ectldh JitJ i;cept thai::-ifJ \ i.J: used as phase
detectors. 7
Two delay line discriminators are used, with delay lines whose lengths are
related by a factor of 8. 0. The sine and cosine outputs from each discrimin
ator are processed by the Video Processor and Controller unit to determine
the frequency offset of the input signal within the 500 MHz IF bandwidth of
the IFM.
• ___________ -_20_-_______ U.Ju
San Jose, California

VIDEO PROCESSOR AND CONTROLLER UNIT
The Video Processor and Controller unit contains video circuitry and analog
to digital converters to process the signals generated by the narrowband
super heterodyne tuners and the tunable IFM. The unit also contains multiple
single board computers for data analysis and control.
The video outputs from each of the narrowband superhet tuner channels are
input to the unit for purposes of signal detection, as shown in Figure 8.
The log video amplitude is compared to a programmable threshold voltage by
the intercept circuitry to indicate the presence of signal energy. The thres
hold voltage is set relative to the noise floor to correspond to a specific
signal to noise ratio.
The two basic sensitivity requirements for an ESM system gf¢ determination
of the presence of a signal ( detection) and determination d( the parameters
of a signal (processing). The detection sensitivity of the \l&-ltem is deter
mined by the capability of the threshold comparator to detect. the presence of
a weak sig~~[? at the inpllJ tf the systJ~j Thil level of sen~~"t.ivity is deter
mined by tfi/J threshold &-iitage appliel lo th.I comparator~ !k1ative to the ::;:::::;::::;:•:
noise level at/ the signal il!it.
t PN •tGEOS ;:-.1---
INTERCEPT
CHlCU1TAY
A/0 C0f'IVERTEA5
TUNED FAEOUENCJES
INTERCEPT FAEO UE.NCIES
PflEPAOCESSOA "NU CUNlAOLLfA
FH'O MEMORY
PARALLEL SYSTEM
BU•
1/0
------1--+ TN J .!2 cor~TMl>l.
>-------1--+ T J,_ Cl.)t,ll ftDL
. R. 1135 Figure 8. Video Processor and Controller Block Diagram
-21- •

Adjustment of the threshold voltage involves trade-offs between probability
of detection and probability of false alarm. 8 False alarms are generated by
noise voltages that exceed the threshold voltage at the comparator, so the
threshold voltage cannot be set too low. Variations in the noise level relative
to the fixed threshold voltage affect the false alarm rate, further degrading
system performance. For this reason, the ANL function is incorporated in
the system, maintaining a relatively constant noise level and allowing the
lowest possible threshold voltage _ ( corresponding to the acceptable false alarm
rate) to be used.
. When a signal exceeds the intercept threshold, the tuned frequency of the
tuner is recorded. The tuned frequency is used by the controller to assign
a tuner to the task of collecting signal parameter data at lit! frequency of
intercept for purposes of analysis and identification. Inte:rg~pt frequencies
are loaded into a first in, first out (FIFO) memory, and latef, $ead by one of
the single board computers .
The single J?g~rd computi~~ used in tij~ unit ijfe Intel iS~d 386/100 32-bit
::::::·::: ·llt:·;s:0::.;Jlt .. ar;u~:::l tJl::~:uss;:tllr~:~tu:::ti:: II parallel i&~tem bus J(if~B) allows,!/ @ultip\¢1I single bo~~¢1} computers to
operate in ;1;~u~1. µ§ifil i ii d s / > t : perf: rm uHtt>:f n tions Th
result is a •.·.· .......... ·.·.·.·.·.·.·.·.·.·.·.·.· .. ... · .. · ·.·.·...... "'e/ xrapr·····r.· ... ·af .. L.• ... 1.• .•. ·~.··· .. ·.·.•• .... a····.• ... · ... ·.r ... L ......... ~ ... ·1···· .. ···:e\· 'Ua)rrcche1s' tec0tu' r>er.•.• .. ,•.• .... • ......... .............. ......
0 ... •.w•.•·.r.· .. ··h·• ...... •.•1: ... •c•·:.•.1:•fi: .. ••.• .. • .. • .. • .. ·······cua::n:::.. ubec adapt
0
ed teo Ve;y pawifffil, nM IJ
a variety of specific applications .
In the block diagram for the unit three single board computers are shown.
The first computer interfaces to the intercept circuit, acts as the system
GPIB controller and interfaces to a hardware tuner control circuit. The
tuner control circuit is state-machine driven, and allows multiple super
heterodyne tuners to be controlled on one or more tuner control interfaces.
The single board computer loads scan limit s or tuned frequencies into the
tuner control circuit to perform the tuner allocation function. It also controls
t he demodulators and switch assembly over parallel TTL lines accessed
t hrough the I/0 board on the iPSB .
• ___ ________ -_22_-_______ UJu
San Jose, Ca liforn ia

The second computer is dedicated to data analysis. Analysis is performed on
both IFM data and collected superhet data to determine signal characteris
tics. Analysis data is transmitted to the computer over the iPSB interface
from the interface microprocessor. The interface microprocessor is a board
developed at Watkins-Johnson Company for application-specific interfaces to
the Intel iPSB.
Selected IF and video signals are received by the unit from the switch
assembly unit. The IF and log video from a set-on superhet tuner are pro
cessed by the unit to collect detailed pulse data for fine grain analysis. The
IF input is converted to FM video by a limiter and discriminator. The FM
video and log video are processed by the video processor Hircuitry to pro
duce amplitude, time of arrival, pulsewidth, fine frequency, and frequency
deviation data for each received pulse. Pulse data is loag~g into a FIFO
memory for transmission to the analysis computer. :i::::/}li\iii
Inputs from the IFM Demodulator are digitized by the analoi ~o digital con
verter (A/D): circuitry. Ai Jp.reshold cortjp!!trat<>:!MQn this boata.tdetects signal
~::::o::J~t:;;~ 8
::e jit::::: stat,1/fuacJi to initiate i/~je conversion. where some Il~ta manlpulan Is p~r:Jlr:e:l:::;a:\li:~le:::::: Output data f#>:rn Jhe p;rjt,:f-it§~mr t~Jtji£<1.ed intd i §~conq ffiJmb memory.
The status of the FIFO memories is monitored by the interface microproces
sor. Transfer of data to the analysis CPU is performed when the FIFO
reaches a predetermined level. ·The interface microprocessor also controls the
superhet and IFM processing circuitry in response to commands from the
iPSB. The unit may be controlled remotely by incorporating a communications
processor or locally by integrating the operator interface functions into the
front panel controls.
The third single board computer on the iPSB is used for overall unit control
as well as control of the TN-122 tuner. This tuner is normally scanning at a
high rate of speed and requires more complex control than the superhets. A
dedicated computer is used for the TN-122 control for this reason.
-23-

SYSTEM PERFORMANCE
Table 4 lists the preferred order of receiver features for various applica
tions, including ESM. The first three features on the list of preferred ESM
features -- sensitivity, instantaneous analysis bandwidth and high signal
density performance -- are provided by the hybrid ESM architecture dis
cussed herein. The fourth item on the list, speed of signal acquisition, is
affected as much by the operation of the system and strategic utilization of
resources as it is by the actual -sy~tem design.
Speed of signal acquisition is related not only to the ..detection of the pres
ence of signal energy, but also to the response of the system to the initial
detection. With the tunable IFM, the detection of a signal dijj~es an immedi
ate digitization of the IFM videos. Preprocessing and analysis immediately
follow, occurring simultaneous to the scanning of the rece',iy.er. Hence, no
time is required for the receiver to return to the signal fr~§# ency prior to
performing signal measurements.
However, dil~ to the hfif scan rate t!r thtP receiver,
m6.i:; than ten : .;; fifteen conilcuti-V,~ pulses fro~t i~ single pulse receiving :=:=::::;.::;.;:;::
train is not y~ry high. jij )addition, tfj.ij} prep[tgfessor limit) }the number of
~:~::• t:1 ::!Jl;:;m;t11,;i;:~f lt:::·1!t~;:i-1ll'::::::a:~1:: train analysis diffibiiTt, and ibWJr the confide~JJ >ii~;l associated with
analysis results.
For this reason, it is advantageous to assign a set-on receiver to newly
intercepted signal frequencies to collect a sufficient number of pulses for
detailed pulse train characterization . In the system presented here, the
narrowband superhets are used as set-on receivers when new signals are
intercepted by the IFM or a scanning superhet. Outputs from the IFM data.
analysis are used by the controller to maintain a file of emitters in the
environment. Each time a new emitter is encountered, the controller allocates
a superhet tuner to the task of collecting signal data on that emitter. The
results of the superhet data analysis are used to improve the information in
the file of intercepted emitters.
• ___________ -_24_-_______ UJu
San Jose, Cal if ornia

Table 4. Preferred Order of RF Receiver Features for Indicated Applications (1-10, higher is better)
General ESM ECM RWR Airborne Ground-Bued
Speed or Speed or Simultaneous Instantaneous Speed of
Sianal 8.7 Sensitivity 8.1 Signal 9.1 Signal 10 Analysis 8.1 Siana! Ac:quisition Acquisition Capability Bandwidth Acquisition
Hi&h Signal Instantaneous Simultaneous High Signal High Signal Hi&h Siana! Density 8.4 Analysis 8.1 Signal 8.9 Density 9 Density 7.9 Density
Performance Bandwidth Capability Performance Performance Performance
Instantaneous High Signal Instantaneous Applicability Speed of Analysis 8.3 Density 8.1 Analysis 8.7 to Exotic 9 Signal 7.8 Sensitivity Bandwidth Performance Bandwidth Signas Acquisition
Speed of High Signal Simultaneous
9.4
9.0
8.9
Sensitivity 8.1 Signal 8.0 Density 8.6 Cost 9 Signal 7.7 Dynamic Ranae 8.4 Acquisition Performance Capability
Simultaneous Frequently Immunity Instantaneous Signal 7.9 Resolution 7.1 Sensitivity 8.1 From 8.5 Sensitivity 7.3 Analysis Capability Jamming Bandwidth 84
Frequency 7.4 Re ten lion of Speed of Short Pulse Frequency Resolution Dynamic Range 6.9 Signal 7.9 Signal 8 Width 6.7 Resolution 8.0
Characteristics Acquisition Capability
Simultaneous Short Pulse Frequency Simultaneous Dynamic Range 7.3 Signal 6.6 Dynamic Range 7. 7 Width 8 Resolution 6.6 Sisnal 8.0
Capability Capability Capability
Shon Pulse Short Pulse Frequency Processing Immunity Retention of Width 6.5 Width 6.1 Resolution 7.4 Complexity 7 From 6.4 Siana! 7.1 Capability Capability Jamming Characteristic
Applicability Processing Immunit>· Processing Shon Pulse To Exotic 6.5 Complexity 6.0 From 7.1 Size 7 Complexity 6.3 Width 6.4 Signals Jamming Capability
Retention of Applicability Short Pulse lnstan taneous Applicability Siana! 6.5 To Exotic 5.6 Width 6.9 Analysis 6 Dynamic Range 6.2 to Exotic 6.3 Characteristics Signals Capabiliy Bandwidth Sianals
Immunity Power Applicability Applicability Immunity From 6.1 Requirements 5.3 to Exotic 6.4 Sensitivity 6 to Exotic 6.1 From 5.6 Jamming
~
Signals Signals Jammina
Processina 6.1 Retention of Processing Frequency Processina Complexity Signal S.3 Complexity .. 5.9 Resolution 6 Size . S.8 Complexity 5.5
Characteristics . ~
Immunity Retention of Cost 4.8 From 4.9 Cost 4.6 Dynamic Range Signal 5.7 Cost 4.1
Jammina ·,. Characteristics
Power 4.5 Size 4.9 Power 3.4 Power 6 Power 5.4 Power 3.3 Requirement! Requirements Requirements Requirements Requirements
Retention of Size 4.5 Cost 4.5 Size 3.4 Signal 4 Cost 5.3 Size 2.6
Characteristics
-25- •

For the superhet to complete the collection task, it must first be directed to
the frequency of intercept. The time required for the system to automatically
respond to a new intercept and for the set-on receiver to get to the signal
frequency can be considered a part of the total acquisition time. Minimizing
this response time ensures identification of threats and signals of short
duration.
Because the superhet tuners are also used to scan the environment for
acquisition purposes, the same problem exists for handing off intercepts from
a scanning superhet to a set-on tuner. It would be possible for the superhet . that initially intercepted the signal to stop its scan, !eturn to the vicinity of
the intercept and attempt to center its passband on the sigp~l. However, it
has been found to be more efficient for the scanning tune¥ >to continue its
scan while the intercept circuitry and computers responc:t .t>Y directing a
second tuner to the frequency of intercept. In this manner ;U~can strategies
that are being executed by the system cont~nue uninterll i5ted, and the
tuner control complexity is reduced.
For the halli~ff process ~i be successiif, it ~~ important t!I~ the recorded ·.·.·.·.·.··.·.·.·. ·.·.·.·•·•·••·•·• ·.·. ·.·.·.·. ht is equal~; important that
::/::
0:::::::u:::~ :1111::~::t t:e Jl::::li~d repeateflt return to a
specific fre~a;n%Y/ F;;-p9#f ~tj\;g<1ug~4 lt}the timii A{i11t~;,1t r or during the
set-on proces; 1 ift¢t~i{ii7th~ @&~tim ¥t;ponse tirri~] wit~ i~/ due to the fact
that signals must be close to the center of the set-on tuner's passband
before collection of data. In dense environments where high selectivity is
required narrow bandwidths are frequently used. To return to a frequency
of intercept using a narrowband set-on tuner requires a high degree of
accuracy in recorded intercept frequencies. The set-on tuner must similarly
be able to precisely tune to the recorded frequency of intercept.
To optimize the acquisition process, Watkins-Johnson has developed automat
ed calibration procedures that correct for the error sources involved in the
intercept process. In addition, the use of synchronized set-on tuners en
sures that tuners can be accurately and repeatedly directed to frequencies
-------------26--_______ U)J San Jose , California

of intercept. Also, the conditions under which the receivers are scanned are
controlled to eliminate as many of the variables that influence frequency
accuracy as possible. The combination of these approaches to the problem of
minimizing acquisition time results in exceptional system performance.
The factors that affect receiver tuning accuracy shall be discussed below, in
order to understand the effectiveness of the approaches described above.
Each of these factors has been addressed, either through calibration or
control techniques in system designs at Watkins-Johnson.
YIG DHVICHS
Microwave signal sources are required in tuners for the gigtration of local
oscillator signals. Fixed frequency, phase locked oscillators are sometimes
applied, as in the TN-122 dual conversion architecture, b1.1t?tunable oscilla
tors are required to provide variable frequency coverage] \i!\\ l4any types of
tunable oscillators have been used for super heterodyne tib¢rs, including
var actor-tuned oscillators, voltage-controlled oscillators, ijjid YI G-tuned
oscillators. A~ in the TN fits and TN-1ii ! tunJiil the YI G-ttiri~d oscillator is
frequently ti§kd as the )/!lnable local} dscmi£Bt because !6.£ its high Q, ·=<··-:-:.·-:-·.
construe-multi-octave]@requency tjp;yirage, tion. 9 ......... //
YIG crystals a,;' U/\Il/f;s the 1111111!:~:ent b§ciillators and filters.
The behavior of the YIG material in resonant circuits affects the performance
of both types of devices. The f?SCillator, however, directly contributes to
tuning errors in receivers, which limit the accuracy of recorded intercept
frequencies.
The most commonly used geometry of the YIG crystal is the sphere. The
sphere is easily produced from the YI G material and can be easily oriented
in a magnetic field. The interaction between the YIG sphere and applied RF
magnetic fields creates a resonance phenomenon whose frequency is deter
mined by the DC magnetic field in which the sphere is submersed. lo The
RF magnetic field and the DC bias field must be orthogonal during coupling,
-27-,__ _____________________ UJ •

however. To produce this relationship between the fields, the sphere is
placed between the poles of an electromagnet as shown in Figure 9. The
sphere is bonded to a rod which allows rotation of the sphere within the
magnetic field. Shown in the figure are the series wound coils and coupling
loops.
The YIG tuning magnet is a simple electromagnet with a single air gap. The
current through the coils ci:eates the required magnetic field across the gap.
The gap region is critical to the performance of the oscillator. Variations in
the magnetic field across the YIG sph_ere must be precisely controlled to .. avoid uncertainty in the resonant frequency of the oscillator.
87.R.1137
Figure 9 . Magnetic St ructure of a YIG Device
-28-________________________ UJ San Jose, Cali f
•
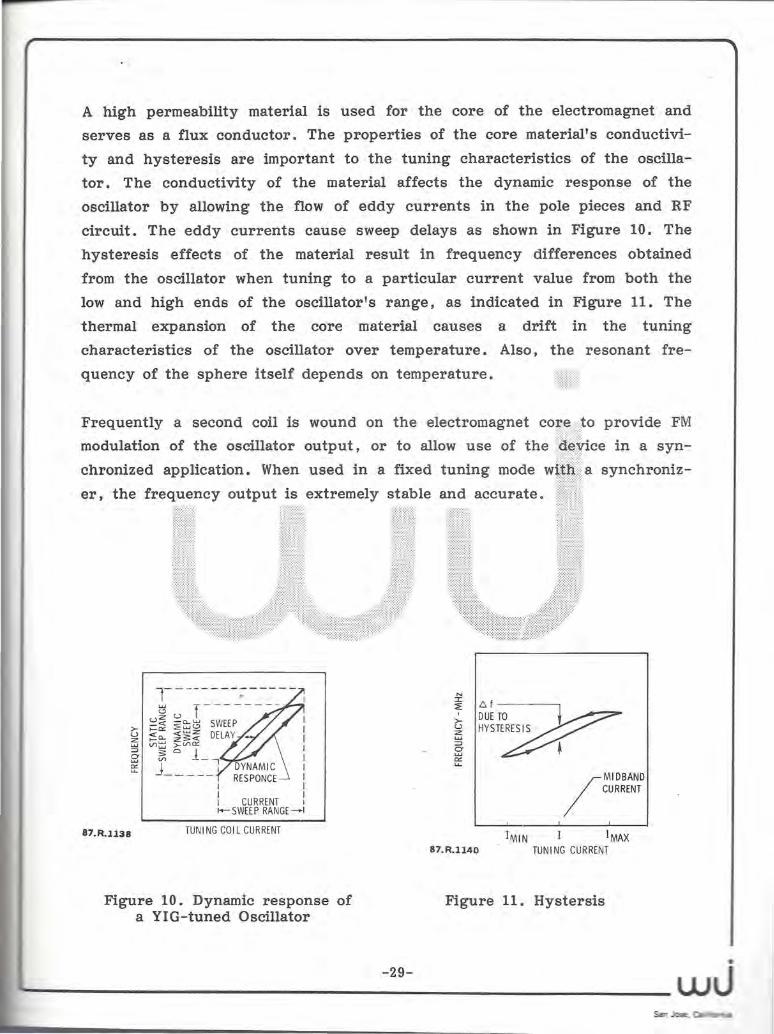
A high permeability material is used for the core of the electromagnet and
serves as a flux conductor. The properties of the core material's conductivi
ty and hysteresis are important to the tuning characteristics of the oscilla
tor. The conductivity of the material affects the dynamic response of the
oscillator by allowing the flow of eddy currents in the pole pieces and RF
circuit. The eddy currents cause sweep delays as shown in Figure 10. The
hysteresis effects of the material result in frequency differences obtained
from the oscillator when tuning to a particular current value from both the
low and high ends of the oscillator's range, as indicated in Figure 11. The
thermal expansion of the core material causes a drift in the tuning
characteristics of the oscillator over temperature. Also, the resonant fre
quency of the sphere itself depends on temperature.
Frequently a second coil is wound on the electromagnet
modulation of the oscillator output, or to allow use of the
chronized application. When used in a fixed tuning mode
er, the frequency output is extremely stable and accurate.
in a syn
a synchroniz-
1- - --- - - - • - - - - - I
~ u T-------->- ~;';'i ~e:;t5 SWEEP ~ ~o.. ~~~ DELAY LLJ Vlt::j >-V)Ct:: :::, s: o I 8 V'l -- ...,
8: j _____ I
I I I I
I I I
I I I I I CURRENT 1 1-<--SWEEP RANGE-I
87.R.1138 TUNING COi L CURRENT
Figure 10 . Dynamic response of a YIG-tuned Oscillator
N
~ 61----
;_ DUETfRESIS .- ~ I HYST~
a:: LL.
87.R.1140
/
MIDBAND CURRENT
1MIN 1MAX TUNING CURRENT
Figure 11. Hystersis
-29-_____________________ UJ •

However, the synchronizer cannot be used while scanning the receiver, so
the dynamic performance of the open-loop YIG oscillator determines the
system's signal acquisition performance.
DYNAMIC TUNING CHARACTERISTICS
Both long and short term dynamic tuning effects are exhibited by open- loop
YIG oscillators. Both types of effects can be seen after a single step change
in tuning current. Short term effects are noted during the first few
microseconds and _can be attributed primarily to eddy currents flowing in the
core. Figure 12 shows the typical short term response. of a YIG oscillator to
a step change in current. The YIG output frequency does not change
instantaneously with the current. Rather, the output changf}approximates a
simple exponential curve with a time constant of between 20 and 200 micro
seconds .11
Long term effects can be attributed to self-he·ating of the !1\¥i G itself, and
manifest themselves in thg .Jorm of a slC>\V frequency drift. :&fie drift is due
to the chant§~in temperai§#e dth1·sast1·poactceud•.•.r .. ,i ,'.•, •.•.• , •.• ,•.:,s, .•. •,~.•.·.·.········Yafttehr.•.•e•.•.•.•.•.•,.•, ..• , .•..•• , .• ,.a, •. c •.•. ucrhraenngteflionw •.•.•. 1,1,11.·.··t=." .•..•.•• ·.tl .•.•• :gnitnhgrocuugrhretnhte. Large amoul~~ of power l~e V /> ::,,}\
coils in the ) t"!G. Changej in coil currmn,~ cht]Wf the interj
scanned, a finite amount of time will be required to reestablish the quiescent
scanning temperature. As the temperature changes, the frequency will drift.
Changes in ambient temperature also affect YIG devices. Several techniques
have been implemented to minimize the effects of ambient temperature chang
es, including the use of heater blankets and temperature compensation
circuits . 12 Neither technique is practical in many systems, so other ap
proaches to the problem have been developed. The approach that will be
described for this system is the use of calibration techniques that can be
quickly and automatically repeated when significant changes in ambient
temperature are experienced.
OSCILLATOR PERFORMANCE
The performance of a YIG oscillator can be specified quantj\~tively under a
combination of static and dynamic conditions. The first pll~ eter used to
specify YIG performance is overall linearity. This param:tit- is measured
under static conditions (after all long term tuning effects l~ve stabilized)
and can be [~1otted as otjltiut frequen¢M ver$tj$ tuning cu##int. A typical
::·~;:• f:)tt• b::;~;,tlll:::· u~.· )tt,.:i:lit:::·~::Y il~:.t;:~::~ NonlinearitieI~t for the YI Q 6$dllators u.$ijd in thi LTN-218 aJl! i¾N-122 tuners
are as great as :~+§ Miii: > <<< ····
t
Ftu
Response of filter center frequency to
a current step at time t = t0 . F 1 is the
filter frequency for a de coil current I 1 and F2 is the filter frequency for a de
current 12 .
Figure 12. YIG Response to Step Change in Input Current
-31-
N I 2 ' - >-u ~ :::, 0 u.J
"" LL
87.R.1139
1
L BEST LINE THROUGH DATA POINTS TO MINIMIZE 6f
TUN! NG CURRENT
Figure 13 . Output Linearity of a YIG Device
r------------------------UJ
•

Hysteresis is defined as the "maximum frequency difference obtained when
tuning to a particular current value from both the low end and the high end
current extremes. 1113 The hysteresis is measured at midband by cycling the
oscillator across its band and approaching the frequency from both direc
tions. The frequency difference is a measure of the hysteresis. Hysteresis
values can be as high as 15 MHz.
Sweep delay is a measure ;>f the lag between the output frequency of the
oscillator under dynamic conditions and the applied tuning current. It is
difficult to measure sweep delay, alth~ugh measurements have been per-~
formed. Results are shown by plotting deviation versus desired frequency
for various sweep rates. Sweep delay is a function of §weep rate, and
typically remains constant across the band or increases as the oscillator falls
farther behind the tuning current toward the end of the sw~ep. Deviations
remain fairly constant (20 to 40 MHz) across the band wheri\\: irioderate sweep :;:;:::::;:::::;::::
rates are used (less than 40 GHz per second) . 14
linearities iri ltn.e YIG :•.t·_r_:_::•o_•.::e.•_•.-.•. ·_s_ pd<{)y:·-····-n_:._:n•_•_••.•_:_s ___ :a•_•_ •_e_._•m·_•_·:·_.·:·' __ l·_. ·: C_::._--•. s._-._•._._-.. _·.w.-._· -.t __ · __ •._·ue_·_:..:_•_•_e_-.... _•_• _•_·_•_r _•_;:._-_ •.. _.n/gdelayJt{P:,ysteresi~ :ijijd temperature effects all ccirifflp:qJ~> U1 errors !~ .iii~ \~eceiver, Without
calibration or c~~Jl~tJrit contr~f tg&hiii~ues the un~;~tJfi.fi~ in tuned frequen
cy during scanning operation can be as great as 50 MHz. This level of
performance is unacceptable for rapid signal acquisition and identification.
Techniques can be applied to overcome the problems associated with scanning
receivers, however. To overcome the errors introduced by hysteresis effects
tuners are commonly scanned in only one direction. Typically, scan strate
gies are implemented that cover a range of frequencies starting with the
lowest frequency and moving upward to the end of the band. When a tuner
reaches the end of its scan the controller commands the tuner to retrace to
the low end of the band. During the retrace cycle, which usually lasts the
'
I
------------32-_______ UJJ San Jose , Calif -

L
1: 1, ,
1: 1,
approximately 20 milliseconds, the microprocessor applies a hysteresis pulse
to the YIG which drives the oscillator well below the bottom of the band.
The YIG then approaches the lowest scan frequency from below to return the
core to the proper point on the hysteresis curve. The techniques of always
scanning the tuner in the same direction and incorporating automatic
hysteresis recovery responses into the tuner itself are commonly used and
effectively eliminate the contribution of hysteresis to receiver tuning errors.
Non-linearities and sweep delay errors can partially be overcome by YIG
driver design. Break points are frequently incorporated in YIG driver
transfer functions to compensate for gross nonlinearities in the device.
Sweep delay, however, is difficult to address for all tuning conditions.
If the step size taken between frequency points during a .scan is large,
drivers can be designed to accelerate the YIG response by): ipplying excess
tuning current during the first few microseconds of the st~~I This is done
to overcome the eddy currents in the device and effecti#~li shorten the
delay time liit~een tuning- ~urrent and tµp.ed {#gquency. Ttl; tUning current
is allowed tdf1eturn to va1Ji \&s u~; YIG approa#lj~s the desired ::;::::=::::::::::
:::·~::~ :;;::~jgq i$ tllgg, JPe ,1, dJi,~~tpµt ~lfnt appears to
overshoot the J&J1i~a v!1ue. ¥H& IM&Gnt or ove;~s6&i i~Jd is a function of
step size. The interaction between eddy currents and tuning currents is
complex, and can only be optimized for a specific step size through careful . adjustment. Adjusting the circuit for the proper amount of overshoot for all
step sizes is virtually impossible. However, if a constant step size is used
when scanning the receiver the technique can~ be used to optimize the YIG
driver for the specific application. The contribution of sweep delay to dy
namic tuning error can then be reduced.
-33-,...... _____________________ UJ •

CALIBRATION TECHNIQUES
In this particular system, the tuner control software and hardware are
designed to step-scan the TN-122 and TN-218 tuners in a consistent manner
to minimize the tuning errors described above. The tuners always take the
identical step size, which allows optimization of the YIG driver circuits.
The TN-122, which scans at a maximum rate of 40 GHz per second, takes a
step size of 4 MHz. The TN-218 tuners have a maximum scan rate of 16 GHz
per second and step 1. 6 MHz ~ during scans. The tuners receive frequency
commands every -100 microseconds, minimum. Adjustment of the scan rate is
accomplished by varying the time between steps.
Using a constant step size allows optimization of the YIG Ca.rivers in the
tuners for the particular application. Sweep delays are therefore minimized,
but not eliminated. Hysteresis effects are minimized by alw~~ij scanning the
tuners from the low end to the high end of the band. ~k~~inearities and
temperature effects can only be addressed through calibratioti techniques.
Calibration ti¢hniques iajpl¢mented in ttte slijj¢m design i#i intended to
remove the £.~rnaining tunifig, errors. Tij~/ tecljiji~ues that vJ;.11 be described
uansed sci gonntarlsoll~e···· e.·,·~·;···.•·,n, •.•. ·,., ::·.::::e.•.:• .. ,r. na1'tte.d Cwo1.·nt .. ·.• n .. t••••.t·n:··~.•.·.•·: .• :1•••.:.::::::t:···: .. hofe tshyestem ! Ila d~tiltors in the\:)#ideo Processor .. : :.., """' g~Htfratiori :P:~9.cess if?:( ~~~rcised by the
Video Proces~dii lha :c!Ht;~ii~~ intt itt~ell, andf ijiic•t1ij:[¢6ffi;1etely automat-'·"<<:\:::=:::::=::;::::::-:.:-·,· .· . ···<:::::::::;:::::;:;::::::::::>:···· . ··: -:: ::::::::::::::::<.::::::::::::-,•.
ed. Execution time of the calibration procedures is approximately 2 minutes
for the tunable IFM and 1 minute per superheterodyne tuner channel, which
allows the process to be initiated as frequently as necessary without signifi
cant operational impact.
TUNABLE IFM CALIBRATION
The tunable IFM calibration takes place in two stages. The first stage is -
referred to as the Static-tuned IFM Discriminator Calibration. The second
stage is the Dynamic Tuning Calibration. The purpose of the first stage is
-34- •
-------------~u San Jose. Ca liforn ia

to remove the nonlinearities associated with the discriminators in the IFM
Demodulator and the translation circuitry in the Video Processor and Control
unit. The translation circuitry is part of the preprocessor, and is required
to correlate the coarse and fine discriminator outputs and resolve ambiguities
in measured frequencies.
To begin stage 1, the controller commands the RF Distribution (RFD) to
connect the aux IF signal to the input of the first TN-218. The aux IF input
to the RFD is actually the LO sample from the TN-122. The controller also
connects the IF and video outputs of the first TN-218 to its processing
inputs. This allows the controller to measure the LO frequen<?y of the
TN-122.
The controller commands the RFD to activate the comb gene;.~lpr and discon
nect the antennas via the input switch unit. The comb gJijlj,ator produces
signals spaced every 100 MHz which are routed to the inpui §f the TN-122.
The narrowband filter is switched into the comb generatorii iutput so that
only one of /jle comb fre.jp:~ncies is p«$.$¢d tdl the TN-122.1Jbis signal, or
picket, is l®Ated at 3 Glti/n:
The TN-122 {ij tuned frqf t 75 GHz ~lil.25111 in 10 Mijlf !Lps. At each
step the coJti-iitw; m2ntti¥ii: lhg ¼P :f#~quenc}I:liiin: th~ ,W:!Jif::1.;2 through the
first TN-218 c~iririil( The t~ri~a t+i4Gency of th; iw:~~ri8h'~onized TN-122 is
adjusted until the LO frequency is correct. When the TN-122 is properly
positioned, the controller records the frequency offset of the picket as . measured by the IFM Demodulator · and preprocessor.
The differences between the measured and actual frequency offsets at each
point are used to build a calibration table for the discriminator. The calibra
tion table corrects for the nonlinearities in the discriminator/measurement
chain. After the calibration table is constructed by the computer, it is
loaded into memory on the preprocessor board to automatically correct fre
quency data during operation.
• -35- • I
~---------------~U San .la2.

Once the discriminator has been calibrated, the remaining sources of error in
IFM frequency measurements are primarily the dynamic tuning characteristics
of the TN-122. To remove the tuning errors, the Dynamic Tuning Calibration
stage is performed. This involves sweeping the tuner across its entire
tuning range and recording the results of frequency measurements of the
comb frequencies from the processing chain.
To perform the Dynamic Tuning .· Calibration, the controller commands the
RFD to remove the filter · from the comb generator output, allowing all comb
frequencies -to reach the tuner. The controller does, however, place the IF i
Demodulator in its narrowband mode; so that only one comb frequency is
within the IFM's passband at any given time. The TN-122 is1Jpen placed into
a scan mode from O. 5 to 18 GHz.
The controller enables normal processing of the IFM data ihf:ough at least
one complete scan. The A/D converters in the Video Procesidjj and Control-
\~:[ f ;:~f 1iiJ:\I~;t~i~:1:~?f 1:~)i~::i~:1::Jl~if ~::~~:~ quency of t~~ receiver' .iwnich was latrihid at: \ll~ie instant )~;, signal broke
threshold. Thij PH!P~t jitij lngi.~':.lr•!{ J,e measq!W:f, . f:~9Jtip<iy of the comb
signal.
Since the comb frequencies are known by the controller to great precision ,
the differences between actual and measured frequencies can be attributed to
tuning errors in the receiver. These differences are used to construct a
tuning calibration table which adjusts the digital tuning word that is sent to
the tuner. The control software accesses the table at each frequency step
during scanning to ensure that the tuner follows the correct tuning curve
during its scan.
-36-

SUPRRHETRRODYNR TUNING CALIBRATION
The bank of superheterodyne TN-218 tuners are used to search for signals
in the environment in parallel with the IFM. Intercepted signals cause the
controller to assign an available TN-218 to the task of collecting analysis
data. The handoff process is limited by the accuracy with which the inter
cept mechanism can record frequencies of intercept from a scanning TN-218.
The intercept mechanism involves monitoring of log video levels with thresh
old comparator circuitry. Threshold breaks cause the circuitry to latch the
digital tuning word that is currently applied to the scanning tuner. The
tuning word is saved in a FIFO memory for later access by the control
software.
The point at which the signal breaks t hreshold is dependent on IF band
width , threshold level, signal strength , scan rate , scan djr,~Gtion and step
size. To minimize the variables, the TN -218 tuners are scanh~d in a constant
direction, with a constant step size, usually with minimu~ threshold, and
generally in the 20 MHz bandwidth . If a standard scan Jij\ti is used, the
point at whfoli the comb $$;nals break t}tresh¢}ij is relativJii constant from
;~:.;::;;~it::~ :,~i11~.::;~,,1:n .r!l~n::1:JII:::: :::·1:::
TN-lOO's in a ilitihriif ~imil;f iB th; Dynamic ttiriirlf c;libration of the
tunable IFM becomes very effective.
The Super heterodyne Tuning Calibration is performed as follows. The con
troller connects the comb generator to t!1e inpu~ of the funer channel. The
filter is removed from the output .of the comb generator to allow all comb
frequencies to reach the tuner. The 20 ~Hz bandwidth is selected in the
MD-100 Demodulator. The tuner is then placed in a scanning mode to cover
the 2 to 18 GHz range.
-37- •

As the tuner encounters each of the comb signals, the intercept circuitry
latches the frequency of intercept as it would in normal operation. The
controller reads the frequencies of intercept from the FIFO. The differences
between actual frequencies and latched frequencies of intercept are calculat
ed, and are used to create a correction table for the tuner.
During operation, the table is accessed by the control software to correct
each frequency of intercept. When an available tuner is directed to the
signal frequency the corrected frequency of intercept is used. The set-on
tuner's synchronizer is activated to ensure that the IF passband is centered
on the signal.
CALIBRATED PERFORMANCE
Performing the automated calibration procedures described ap:pye significantly
improves the ability of the system to return to intercepted $~liial frequencies
with narrowband receivers. Without calibration or properly :¢on trolled scan
conditions t he errors introduced in the frequency measuretjj~ilt process can
be as greaf ii 50 MHz. <Pi~trolling thJ ijcan #lte and step ~fze, optimizing
the YIG dr~mJ rs, and uii#g hysteresii /recol~#y during J~~#ace eliminates
approximatefy \ 20 MHz of thi overall err&f:} \
The · _>i < > ' ,•,,.,,.'0.•.•.•.:.,.•,...•.•.•.' .•. ·.·,•e1 ....... '•'a''.'.'.•.·.,d·.•.•,'.'.•.• ~.'.·.· .... '•,:r· .. ·.·.·.,e ... ·.·.s ... · .. s .... ·e .. ·:.,·.·.·d .. ··· ... ·.•·· .····.•.','.•.,.•.', •. ',~,• .• ,' ...•. •.•.iy•. /f the ••t•••••u1 .• n1, •. :,.,·1.•,•.•,·n ... •,·'.,•,·.·,• .. •, .. g'·.'. ·.·,',.',.,.,,·,. lid t t<} procedures . remammg ;js~[~ ..... , u u ca . 1;1:fa ion The resultant system p;rfor~Jrid~j iifter execution' 6ft•tw: / ~alibration proce-
dures is better than 5 MHz, RMS. This allows synchronized receivers with 20
MHz bandwidths to return to the intercept frequency without further center
ing. The reduction in total acquisition time ensures rapid identification of
threats and signals of short duration.
Performance improvements of the magnitude achieved here are possible in
many applications. The techniques require little in the way of additional
hardware, so the recurring cost impacts are minimal. The results realized
through careful consideration of the actual sources of system errors, and
implementation of control algorithms and calibration procedures to eliminate
•
-------------38--_______ UJu San Jose, California ---

those sources of error, required only the integration of distributed proces
sors. However, these processors are already being incorporated into many
current system designs, as the availability of inexpensive microprocessors
and powerful single board computers improves. Such processing power
provides the intelligence to automatically perform the required control and
calibration functions.
1.
2.
3.
4.
5.
6.
7.
8.
9.
CITED REFERENCES
L. W. Lemley and R. F. Gleason, ed. , RF Receivers for Electronic Warfare, Report 8737, Naval Research Laboratory, Washington, D.C., 1985, p. 37.
Ibid, p. 37.
Ibid, p. 6.
Ibid, p. 7.
Comal Tech-Notes, "YIG-tuned Bulk GaAs Oscillators, 11 Watkins-Johson
~:~ki~:;,~;.~:~ cL;;;:;;~:~i~iJff :! llle~te5~ ~:·It~~~. -oct.
~:;Ldi~: ~!!~~~·-(~~a~~ ~~df t .. ~~-b~:;f ~hnsl (Company
Lemley, 6~Ii~f!•pJ$;.z~~ji········}•••••••••••••···••·••••·•·•••••••U>••••••••·•
C. E. Foster, II and T. G. Simon, "Microwave Frequency Synthesizers, 11
Watkins-Johnson Company Tech-Notes, vol. 2, no. 3, p. 6 (May-June 1975).
10. Ref. 5, Op Cit, p. 3-4.
11. K. D. Gilbert, "Dynamic Tuning_ Characteristics of YIG Devices," Application Note DCN 100343, originated at Watkins-Johnson Company, reprinted in Microwave Journal, June 1970, p. 3.
12. Papp, Op Cit, p. 4.
13. Ref. 5, Op Cit, p. 9.
14. Gilbert, Op Cit, p. 4.
• -------------39--________ LUtJ