i2ct_submission_96
TRANSCRIPT
Comparative Analysis of Linear and Non-linear
Extended State Observer
with Application to Motion Control
Kaliprasad A. Mahapatro Ashitosh D. Chavan
Department of Electronics and Telecommunication Department of Electronics and Telecommunication
Vishwakarma Institute of Technology,Pune University MIT Academy of Engineering, Pune University
Pune, Maharashtra 411037,INDIA Pune, Maharashtra 412105,INDIA
[email protected] [email protected]
Prasheel V. Suryawanshi Milind E. Rane
Department of Electronics and Telecommunication Department of Electronics and Telecommunication
MIT Academy of Engineering, Pune University Vishwakarma Institute of Technology,Pune University
Pune, Maharashtra 412105,INDIA Pune, Maharashtra 411037,INDIA
[email protected] [email protected]
Abstract- The design of observer for estimating states,
disturbances, and uncertainty in plant dynamics is an important
step for achieving high performance model based control
schemes. This paper gives the estimation of states and lumped
uncertainty by using extended state observer (ESO) and feedback
linearization technique; moreover the question raised in this
paper is which ESO stands effectively when maximum
information of plant is not known? And can we achieve robust
control if sensor calibration fails in real time? Simulation results
says that nonlinear extended state observer (ESO) actively
estimate the states, uncertainty and unknown disturbances when
maximum information of the plant is not known as compared to
linear extended state observer (LESO). The beauty of estimating
lumped uncertainty by extended state of ESO adds an advantage
that, dependency of sensor is no more required.
Index Terms—Extended State Observer (ESO), Feedback
Linearization (FL), Nonlinear ESO (NESO), Linear ESO (LESO)
and Motion control.
I. INTRODUCTION
Control design for the systems with uncertainties and
disturbance is prime issue in industry, military and space
application. Due to nonlinearity and lack of information, it is
very difficult to compensate the uncertainty and disturbance.
Painful control efforts have been put by the researchers, such
as conventional PID control [1] adaptive control [2] etc.
However as stated in [3] the common disadvantage in the PID
is the integral term, causes phase margin due to phase lag and
saturation. The common disadvantage in classical control, it
fails in presence of strong internal and external uncertainty
due to lack of uncertainty knowledge by the controller.
A revolutionary change was made in when observer was
first introduced by Luenberger [4]. The fundamental concept
of observer is to estimate the states and moreover uncertainty
in advance, based on minimum sensor input and then
compensate by using suitable control law. Many observers
were designed in last two decades like, high gain observer [5]
disturbance observer [6] sliding mode observer [7]. In [8]
comparison study of different advance state observer is carried
out. Overall, the Extended State Observer (ESO) estimates
efficiently the uncertainties, disturbances, and sensor noise.
The beauty of ESO is the lumped uncertainty and disturbances
are estimated by extended state which is mathematically
explained in section-4.
In [9] it is showed that in ESO, accurate information about
the plant is also not required. Several applications have been
carried out for estimating uncertainties and disturbances. In
[10] proportional derivative (PD) and extended state observer
(ESO) i.e. PD+ESO control of rotor shaft position of flywheel
was carried out which proved better in disturbance rejection
and robustness. The use of ESO is reported in diverse
applications like torsional vibration suppression [11], DC-DC
power converter [12] etc. Military application like altitude
control for a non-linear missile system making use of the ESO,
industrial application like Clutch Slip Control for Automatic
Transmission are also reported in [13] [14].
This paper presents a comparative analysis of nonlinear
and linear extended state observer along with the feedback
linearization (FL) control technique which is based on concept
of inverse dynamics. The simulation results show the response
of trajectory tacking of ESO + FL when maximum
information of the plant is not known and unknown torque
disturbances. Simulation analyses are carried out by using the
standard mathematical model of ECP 220 control bed.
International Conference on Convergence of Technology - 2014
978-1-4799-3759-2/14/$31.00©2014 IEEE 1
The paper is structured as follows. Section-2 gives the
mathematical model of the plant along with the input output
linearization. Section-3 describes the feedback linearization
control law. Section-4 gives the detailed information about
extended state observer along with its mathematical
description. Section-5 presents the simulation results for linear
extended state observer (LESO) and nonlinear extended state
observer (NESO) for step and sinusoidal trajectory
respectively in presence of disturbances and uncertainty.
Section-6 gives concluding remark. Finally acknowledgement
is stated in section-7.
II. PLANT DYNAMICS MODEL
Figure 1. Plant dynamic model ECP 220
The industrial motion control setup is an ideal experiment
intended to model speed and position of robot. This is also
useful in study of a robotic plant in presence of uncertainties
and disturbance like unwanted weight acting on robot, torque
disturbance, undesirable friction and backlash etc. In this
paper we have considered model of standard industrial
emulator and servo trainer model 220 by ECP [15] as shown
in figure 1.
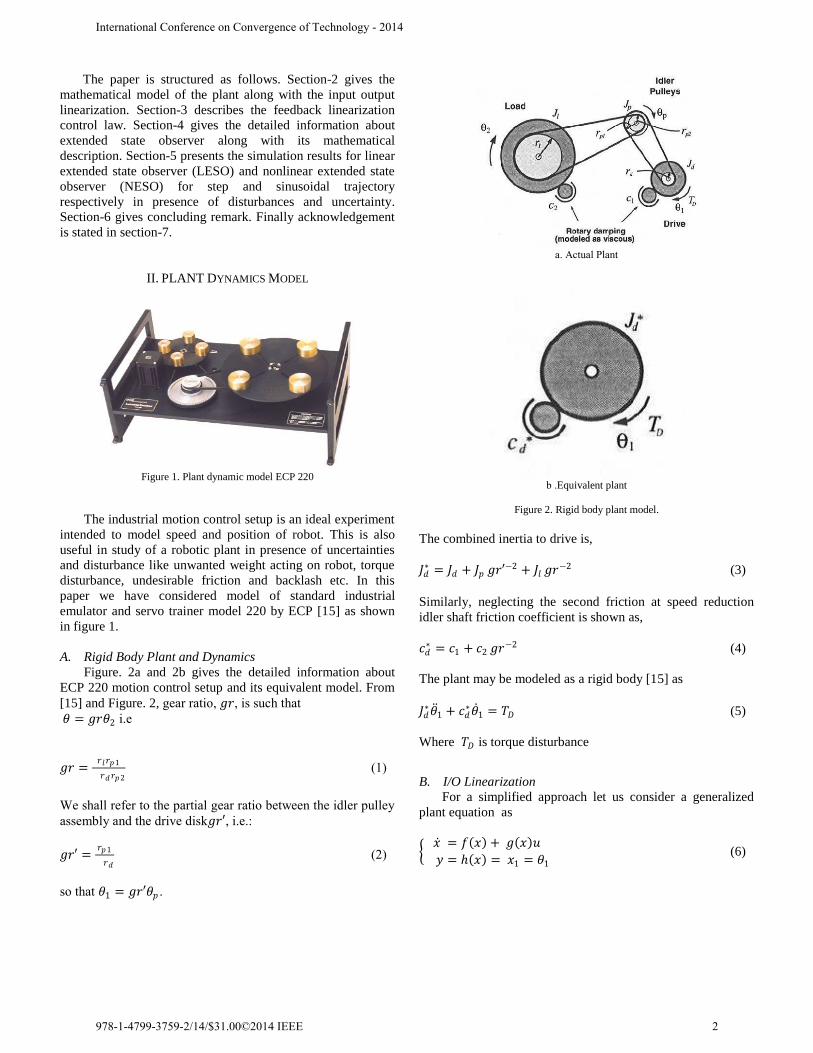
A. Rigid Body Plant and Dynamics
Figure. 2a and 2b gives the detailed information about
ECP 220 motion control setup and its equivalent model. From
[15] and Figure. 2, gear ratio, 𝑔𝑟, is such that
𝜃 = 𝑔𝑟𝜃2 i.e
𝑔𝑟 =𝑟𝑙𝑟𝑝1
𝑟𝑑𝑟𝑝2 (1)
We shall refer to the partial gear ratio between the idler pulley
assembly and the drive disk𝑔𝑟′, i.e.:
𝑔𝑟′ =𝑟𝑝1
𝑟𝑑 (2)
so that 𝜃1 = 𝑔𝑟′𝜃𝑝 .
a. Actual Plant
b .Equivalent plant
Figure 2. Rigid body plant model.
The combined inertia to drive is,
𝐽𝑑∗ = 𝐽𝑑 + 𝐽𝑝 𝑔𝑟′
−2 + 𝐽𝑙 𝑔𝑟−2 (3)
Similarly, neglecting the second friction at speed reduction
idler shaft friction coefficient is shown as,
𝑐𝑑∗ = 𝑐1 + 𝑐2 𝑔𝑟
−2 (4)
The plant may be modeled as a rigid body [15] as
𝐽𝑑∗𝜃 1 + 𝑐𝑑
∗𝜃 1 = 𝑇𝐷 (5)
Where 𝑇𝐷 is torque disturbance
B. I/O Linearization
For a simplified approach let us consider a generalized
plant equation as
𝑥 = 𝑓 𝑥 + 𝑔 𝑥 𝑢
𝑦 = 𝑥 = 𝑥1 = 𝜃1
(6)
International Conference on Convergence of Technology - 2014
978-1-4799-3759-2/14/$31.00©2014 IEEE 2

As stated in [16], trajectory tracking can be designed by using
geometric control theory based on feedback linearization.
Considering space coordination 𝑧𝑖 . Let
z = ∅1(𝑥)
∅2(𝑥) =
𝐿𝑓0 (𝑥)
𝐿𝑓1 (𝑥)
(7)
Where 𝐿𝑓 h is called lie derivative of h w.r.t . 𝑓. As defined in
[16], h:ℜ𝑛 → ℜ be a smooth scalar function and 𝑓 : ℜ𝑛 →
ℜ𝑛 be a smooth vector field ℜ𝑛 then the lie derivative of h
w.r.t . 𝑓 is a scalar function defined by
𝐿𝑓 = ∇𝑓 (8)
Therefore from above stated concept and [15][17] and
equation (5). The dynamics in new coordinate model can be
written as
𝑧 1𝑧 2 =
𝑧2
−𝑐𝑑∗
𝐽𝑑∗ 𝑧2 +
𝑇𝐷
𝐽𝑑∗ +
01
𝐽𝑑∗ u (9)
Where u = control voltage.
III. FEEDBACK LINEARIZATION
A single input non-linear system in the form of equation
(6) with f(x) and g(x) being smooth vector fields on ℜ𝑛 is said
to be input- state linearizable if there exist a region Ω in ℜ𝑛
adiffeomorphism Φ = Ω → ℜ𝑛 and a non linear feedback
control law
𝜐 = 𝛼 + 𝛽𝑢 (10)
Where u is the control voltage 𝑉𝑚 such that 𝑧 = 𝜙(𝑥) and
the new input 𝜐 satisfy a linear time invariant relation,
𝑧 = 𝐴𝑧 + 𝐵𝑢 (11)
From equation (10) define a new 𝜐 in the linearized system,
then the relationship between u and 𝜐 becomes
𝑢 =𝜐−𝛼
𝛽 (12)
Then non-singular system is linearzed as
𝑧 = 0 10 0
𝑧 + 01 𝜐 (13)
𝑦 = 1 0 𝑧 (14)
The system is linear and controllable, and it can be stabilized
by state feedback or optimal control.
Now taking new input 𝜗 as
𝜗 = 𝜗𝑐 + 𝑘1(𝜗𝑐 - 𝑧1) + 𝑘2(𝜗 𝑐 - 𝑧2) (15)
where the 𝜗𝑐 represent the reference trajectory. Applying the
control law to (11), the tracking error dynamics can be written
as
d2e
dt 2 + 𝑘2𝑑𝑒
𝑑𝑡+ 𝑘1𝑒 (16)
Where 𝑒 = (𝜗𝑐 − 𝑧1)is the tracking error. The gain values
of 𝑘𝑖 are chosen appropriately to achieve desired trajectory
tracking of reference signal 𝜗𝑐 . From (15) and (12) the control
input u can be rewritten as
𝑢 = 1
𝛽[𝜗𝑐 + 𝑘1 𝜗𝑐 − 𝑧1 + 𝑘2 𝜗 𝑐 − 𝑧2 − α] (17)
However as shown in equation (17), it is very difficult
practically to guarantee the exactness of 𝛽 and 𝛼 due to
uncertainty and disturbances.
Let us assume that we know some information about the plant.
Let 𝛽 = 𝑏0 and 𝛼 = 𝑎0 + 𝑑 where d = associated lumped
uncertainty and disturbance
𝑢 = 1
𝑏0[𝜗𝑐 + 𝑘1 𝜗𝑐 − 𝑧1 + 𝑘2 𝜗 𝑐 − 𝑧2 − 𝑎0 − 𝑑] (18)
IV. EXTENDED STATE OBSERVER
In order to design a controller which will work when
some information about the plant i.e. 𝑎0 𝑏0 , in presence of
lumped uncertainty and disturbances d and to find exact
information about the states 𝑧𝑖 of the plant without maximum
dependencies on practical plant (i.e. without maximum
sensors) it is very essential to estimate the state 𝑧𝑖 and
perturbed systems d. In this paper we have estimated by using
an Extended State Observer (ESO). Extended state observers
offer a unique theoretical fascination. The concept is based on
linear as well as non-linear systems, dynamic response,
controllability, observability and stability, and provides a
relation [18] in which all of these concepts interact. ESO
estimates states of the plant along with uncertainty and
disturbances of plant and sensors. Moreover it is independent
of plant model. Overall it performs better than other observer
and it is very simple to implement practically.
A. Mathematical Interpretation of ESO
In general, the nth
order non-linear equation is represented
as,
𝑧 𝑛
= 𝑓 𝑧, 𝑧 ,…… . 𝑧 𝑛−1
,𝜔 + 𝑏𝑢 (19)
Where 𝑓 . represent the dynamics of the plant + disturbance.
𝜔 is the unknown disturbance (𝑇𝐷 ) in our case. u is the
control effort given in voltage. z is the measured output.
𝑏 = 𝑏0 + Δ𝑏 where 𝑏0 is the best known value. The Equation
(19) is augmented as
International Conference on Convergence of Technology - 2014
978-1-4799-3759-2/14/$31.00©2014 IEEE 3

𝑧 1 = 𝑧2 𝑧 1 = 𝑧3
. (20)
. 𝑧 𝑛 = 𝑧𝑛+1 + 𝑏0𝑢
𝑧 𝑛+1 = 𝑦 = 𝑧1
In state-space notation
𝑧 = 𝐴𝑧 + 𝐵𝑢 + 𝐸 (21)
Here 𝑓(𝑧, 𝑧 ,𝜔) and its derivative = 𝑓(𝑧, 𝑧 ,𝜔) are assumed
to be unknown, by using state estimator it is now possible to
estimate 𝑓(𝑧, 𝑧 ,𝜔) for (20). A non-linear observer was
proposed in [3] as
𝑧 1 = 𝑧 2 + 𝛽1𝑔1 𝑒 ⋮
𝑧 𝑛 = 𝑧 𝑛+1 + 𝛽𝑛𝑔𝑛 𝑒 + 𝑏0𝑢
𝑧 𝑛+1 = 𝛽𝑛+1𝑔𝑛+1 𝑒
(22)
Where 𝑒 = 𝑦 − 𝑧 1 is the error, 𝑔𝑖 . is a nonlinear gain
satisfying 𝑒 × 𝑔𝑖 > 0 ∀ 𝑒 ≠ 0. If one chooses the nonlinear
function 𝑔𝑖 . and their related parameters properly, the
estimated state variable 𝑧 𝑖 are expected to converge to the
respective state of the system 𝑧𝑖 , i.e. 𝑧 𝑖 → 𝑧𝑖 The choice of 𝑔𝑖 is heuristically given in [8]
𝑔𝑖 𝑒,𝛼𝑖 , 𝛿 = 𝑒 𝛼𝑖 , 𝑒 > 𝛿
𝛿𝑒
1−𝛼𝑖 , 𝑒 ≤ 𝛿 (23)
Where 𝛿 is the small number (𝛿> 0) which add limit to the
gain, 𝛽 is the observer gain carried by the pole-placement
method.𝛼 is normally selected between 0 and 1 for Non-linear
ESO (NESO) and is considered unity in Linear ESO (LESO)
In (22), 𝑧 1, 𝑧 2 … . 𝑧 𝑛 estimate the state of plant and 𝑧 𝑛+1 is the
extended state which estimates the uncertainties in plant,
which adds robustness in our controller design. The LESO for
the system is designed by making 𝛼 = 1 i.e. gain g(e)=e . The
state-space model, can be written as
𝑧 = 𝐴𝑧 + 𝐵𝑢 + 𝐿𝐶(𝑧 − 𝑧 ) (24)
Where
L = [𝛽1𝛽2…… 𝛽𝑛𝛽𝑛+1] T
(25)
is the observer gain vector
B. Robust Control
Integrating the discussion carried out in section 3 and 4
respectively the robust control of motion plant can be designed
as shown in figure 3.
According to our plant extended state observer along with
feedback linearization control can be designed as
𝑧 1 = 𝑧 2 + 𝛽1𝑔1(𝑒)
𝑧 2 = 𝑧 3 + 𝛽2𝑔2 𝑒 + 𝑏0𝑢
𝑧 3 = 𝛽3𝑔3 𝑒 𝑦 = 𝑧1
(26)
Now instead of using practical state 𝑧1 and 𝑧2 in equation
(18) we will use estimated state 𝑧 1 and 𝑧 2 and lumped
uncertainty and disturbance will be estimated by extended
state 𝑧 3. Therefore control effort 𝑢 will take the form
𝑢 = 1
𝑏0[𝜗𝑐 + 𝑘1 𝜗𝑐 − 𝑧 1 + 𝑘2 𝜗 𝑐 − 𝑧 2 − 𝑎0 − 𝑧 3] (27)
V. SIMULATION RESULTS
By considering the nominal values of the plant from [15]
equation (9) can be rewritten as.
𝑧 1𝑧 2 =
𝑧2
−1.41𝑧2 + 23.2𝑇𝐷 +
023.2
𝑢 (28)
From equation note that 𝑏0 = 23.2 actually but to make the
system more realistic we have consider 𝑏0 = 38 i.e. ∆𝑏 𝑢 =(23.2 − 38)𝑢 is the associated uncertainty in the plant.
Torque disturbance 𝑇𝐷 is considered as 1𝑉 𝑎𝑛𝑑 1 × sin(𝑡)
step and sinusoidal voltage which corresponds to 10% of
maximum torque when step of 1𝑉 and sinusoidal voltage of
6𝑉 are applied respectively. Therefore practical plant can be
written as
𝑧 1 = 𝑧2
𝑧 2 = −1.41𝑧2 + 23.2𝑇𝐷 + 23 − 38 𝑢 + 38𝑢
= 𝑓 + 38𝑢 (29)
The controller gains are taken as 𝑘1 = 16 𝑎𝑛𝑑 𝑘2 = 8. Observer gain as 𝛽1 = 26.6 ,𝛽2 = 169.11 𝑎𝑛𝑑 𝛽3 = 315.13 calculated via pole placement method. The results divided in
two sections as Linear Extended State Observer (LESO) and
Nonlinear Extended State Observer (NESO)
International Conference on Convergence of Technology - 2014
978-1-4799-3759-2/14/$31.00©2014 IEEE 4

Figure 3. ESO and FL block for estimating states, uncertainty and disturbances
A. LESO
LESO is designed by considering 𝛼 = [1 1 1].
a. Step Position Tracking
b. Step Velocity Tracking
Figure 4. (-) States and (--) Estimated States for step trajectory
a. Position Tracking for sinewave
b. Velocity Tracking for sinewave
Figure 5. (-) States and (--) Estimated States for sine trajectory
B. NESO
NESO is designed by considering 𝛼 = [1 0.5 0.25].
a. Step Position Tracking
International Conference on Convergence of Technology - 2014
978-1-4799-3759-2/14/$31.00©2014 IEEE 5

b. Step Velocity Tracking
Figure 6. (-) States and (--) Estimated States for step trajectory
a. Position Tracking for sinewave
b. Velocity Tracking for sinewave
Figure 7 (-) States and (--) Estimated States for sine trajectory
VI. CONCLUSION
1. In this paper a robust control algorithm for an
industrial motion control setup is proposed by
integrating feedback linearization with extended state
observer.
2. From figure 4, 5 and figure 6, 7 it is clear that, for
different trajectory, nonlinear extended state observer
(NESO) provides superior estimation of states,
uncertainty and disturbances.
3. By choosing 𝛼 as 0 < 𝛼 ≤ 1 the transient error can
be significantly reduced.
4. Minimum converging time i.e. speeds and accuracy
of states of observer converges to those of plant in
NESO.
5. From the simulation result and figure 3 following
conclusion can be drawn
If we assumed calibration error in position
sensor by adjusting proper observer gains
better estimation of position can be done.
Moreover, by having information of
position sensor alone the ESO is able to
estimate velocity. Therefore dependency of
sensor is reduced.
VII. ACKNOWLEDGEMENT
The principal author is thankful to MIT Academy of
Engineering, Alandi (D), Pune (Instrumentation and Control
Lab) for the use of advance lab equipments and software for
carrying out this work.
REFERENCES
[1] K. J. Astrom and T. Hagglund, PID controllers: Theory, design
and tuning. Research Triangle Park, N.C. “Instrument Society of
America”, 1995.
[2] K. J. Astrom and B. Wittenmark, Adaptive Control, 2nd edition,
Reading MA: Addison-Wesley, 1995.
[3] Jingquin Han. From PID to active disturbance rejection control.
“IEEE Transactions On Industrial Electronics”, 56(3):900 – 906,
March 2009.
[4] David G. Luenberger, An Introduction to Observer “IEEE
Transaction on automatic control”, vol. 16, no. 06, pp. 596 -
602, Decembers 1971.
[5] Khalil. H. K. High-gain observers in nonlinear feedback control.
“New Directions in Nonlinear Observer Design” Vol. 24(4).
1999. pp: 249
268.
[6] J. J. E. Slotine, J. K. Hednck, and E. A. Misawa, “On sliding
observers for nonlinear system” Journal of Dynamic Systems,
Measurement, and Control” Vol. 109, 1987, pp 245-252.
[7] A. Radke and Z. Gao, A survey of state and disturbance
observers for practitioners, "American Control Conference”, pp.
5183 - 5188, June 2006.
[8] Weiwen Wang and Zhiqiang Gao. A comparison study of
advanced state observer design techniques. “In Proceeding of
the American Control Conference”, pages 4754 – 4759, Denver,
Colorado, 2003.
[9] Z. G. Qing Zheng, Linda Q. Gao, On validation of extended
state Observer through analysis and experimentation, ”Journal of
Dynamic Systems, Measurement, and Control, ASME”, vol.134,
2012.
[10] B. X. S. Alexander, Richard Rarick, and Lili Dong. A novel
application of an extended state observer for high performance
control of NASA’s HSS flywheel and fault detection.
“American Control Conference”, pages 5216 – 5221, June 2008.
[11] Ruicheng Zhang, Zhikun Chen, Youliang Yang, and Chaonan
Tong.. Torsional Vibration Suppression Control in the Main
drive system of Rolling Mill by State Feedback speed Controller
Based on Extended State Observer, “IEEE international
conference on control and automation” pages 2172 – 2177,
Guangzhou, CHINA, May 2007.
[12] B. Sun and Z. Gao. A DSP based active disturbance rejection
control design for a 1-kwh bridge dc-dc power converter.
“IEEE Transactions on Industrial Electronics”, 52(5):1271 –
1277, October 2005.
[13] Y. Xia, Z. Zhu, and M. Fu. Back-stepping sliding mode control
for missile systems based on an extended state observer. “IET
Control Theory and Applications”, 05:93 – 102, March 2011.
[14] Yunfeng Hu, Qifang Liu, Bingzhao Gao, and Hong Chen.
“ADRC Based Clutch Slip Control for Automatic Transmission”
IEEE Chinese Control and Decision Conference (CCDC)., pages
2725 – 2730, 2011.
[15] ECP, Model 220 Industrial Plant Emulator, Educational Control
Products, Canada.
International Conference on Convergence of Technology - 2014
978-1-4799-3759-2/14/$31.00©2014 IEEE 6

[16] Jean Jacques E. Slotine and Weiping Li. “Applied Nonlinear
Control”. Prentice Hall, New Jersey, U.S.A, 1st edition, 1991.
ISBN 0-13-0408905.
[17] Z. Gao, Scaling and bandwidth-parameterization based
controller tuning, “American Control Conference”, pp. 4989-
4996, June 2003.
[18] Aaron Radke and Zhiqiang Gao. A survey of state and
disturbance observers for practitioners. “In Proceedings of the
2006 American Control Conference”, pages 5183 –5188,
Minnesota, USA, June 2006.
International Conference on Convergence of Technology - 2014
978-1-4799-3759-2/14/$31.00©2014 IEEE 7