human posture recognition with convex programming hao jiang, ze-nian li and mark s. drew school of...
Post on 20-Dec-2015
217 views
TRANSCRIPT

Human Posture Recognition with Convex Programming
Hao Jiang, Ze-Nian Li and Mark S. Drew
School of Computing Science
Simon Fraser University
Burnaby, BC, V5A 1S6

July, 11th, 2005 Simon Fraser University
Human Posture Recognition
Recognizing human postures is very important in vision and multimedia.
It has many applications in surveillance, human computer interaction, image and video database analysis and retrieval.
At the same time, recognizing human postures is a hard problem.
July, 11th, 2005 Simon Fraser University
The Challenges of Human Posture Recognition It is hard to recognize human postures because:
– Articulated nature of a human body– No segmentation schemes are available for general
images or videos.– Strong background clutters.– Large appearance changes because of clothing
Different schemes have been studied.

July, 11th, 2005 Simon Fraser University
Methods for Posture Recognition
Methods having been studied:– Silhouette based method with background
subtraction– Multi-camera based methods– Tracking body movement– Chamfer matching based schemes– Shape context based schemes
These methods are not sufficient to address the problem robustly.
July, 11th, 2005 Simon Fraser University
The Proposed Method
We will present a matching based scheme that has the following properties:– Based on a robust convex (linear) programming
matching scheme– Work for cases where no background subtraction is
available– Able to deal with strong background clutters– Able to deal with large appearance changes

July, 11th, 2005 Simon Fraser University
Matching Distance Transform
Canny EdgeDetection
DistanceTransform
Feature PointSelection
DelaunayTriangulation
TemplateGeneration
Canny EdgeDetection
DistanceTransform
MatchingWith LP
TemplateImage
TargetImage
Object Recognition
result

July, 11th, 2005 Simon Fraser University
Matching as a Labeling Problem
p
q
fp
fq
Target p’
Target q’
Clutter
Target
Template Mesh
Target Image

July, 11th, 2005 Simon Fraser University
The Labeling Problem The matching problem can be formulated as
the following optimization problem:
Matching cost Smoothing term

July, 11th, 2005 Simon Fraser University
Convex Relaxation The original problem is a hard non-convex
problem. We convert it to LP:
|fp-fq|c’(s,j)

July, 11th, 2005 Simon Fraser University
Properties of the Relaxation1. For convex problems, LP exactly solves the continuous extension of
the original problem.2. For general non-convex problems, LP solves the problem where
each matching surface is replaced by the lower convex hull. 3. The “cheapest” basis set for each site corresponds to the lower
convex hull’s vertices

July, 11th, 2005 Simon Fraser University
The Effect of Covexification
For site 0
For site M-1
…
c(0,j)
c(M-1,j)
Label
:Basic Labels
Convexification
Label Label
c(i,j)
: Lower Convex Hull Vertices
Label
For non-convex problems, the relaxation replaces eachc(m,j) by its lower convex hull surface:
July, 11th, 2005 Simon Fraser University
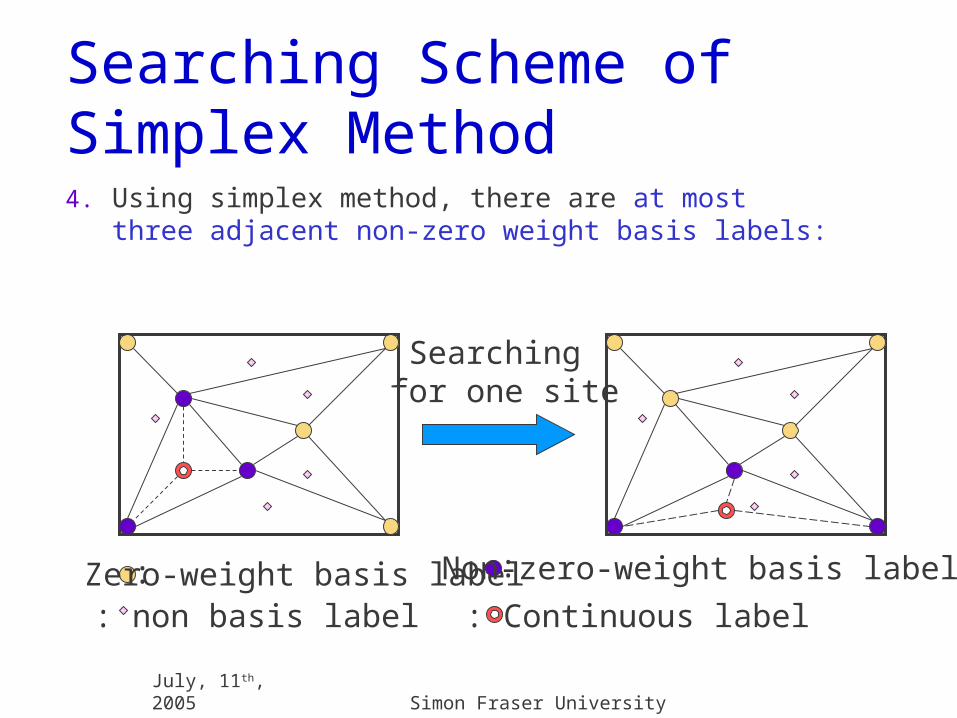
Searching Scheme of Simplex Method4. Using simplex method, there are at most three
adjacent non-zero weight basis labels:
: Zero-weight basis label : Non-zero-weight basis label
: non basis label : Continuous label
Searching for one site

July, 11th, 2005 Simon Fraser University
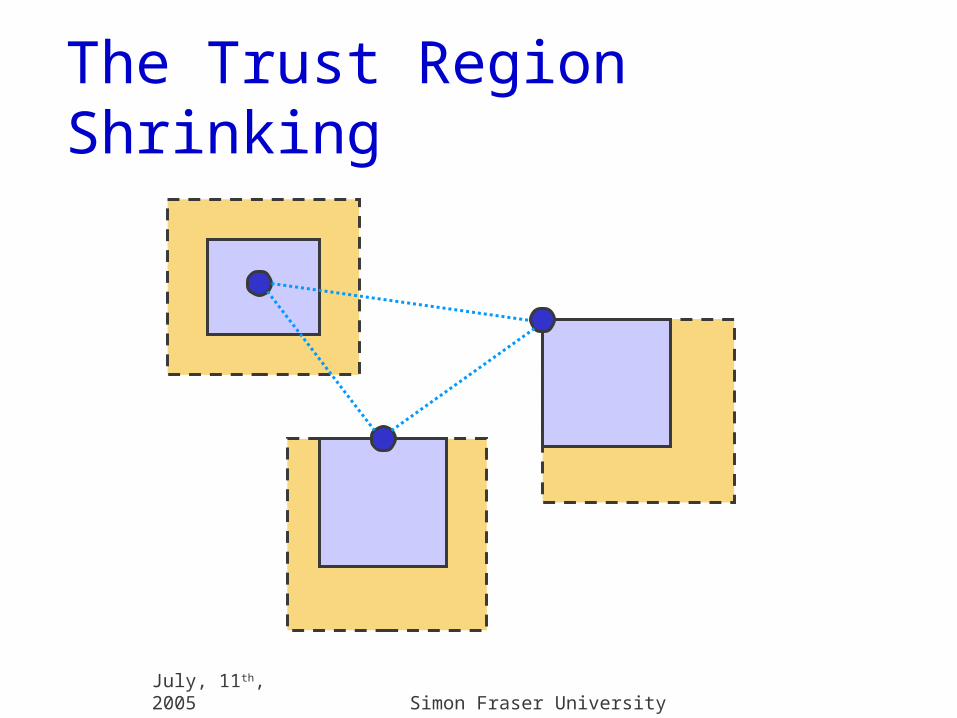
Successive Relaxation Scheme
Single relaxation may miss the global optimum because of convexification effect
An intuitive scheme is to shrink the trust region and reconvexify the data in the smaller region
This scheme is found to be able to greatly improve the matching results
July, 11th, 2005 Simon Fraser University
The Trust Region Shrinking

July, 11th, 2005 Simon Fraser University
Successive Relaxation Scheme (An Example)
min C(1,1)+ C(2,2)+0.5|1-2|

July, 11th, 2005 Simon Fraser University
Shape Recognition
We have to define the goodness of matching– Matching cost (M): Average difference of the
template and target image in the ROI.– Deformation (D): Affine transformation
compensated pairwise distance changes– Shape Context in the ROI (C).
Finally, we use M + a*D+b*C to quantify the matching

July, 11th, 2005 Simon Fraser University
Random Dots Experiment
Noise: 50%Random
Disturbance: 5
Noise: 100%Random
Disturbance: 5
Noise: 50%Random
Disturbance: 10
Noise: 100%Random
Disturbance: 10

July, 11th, 2005 Simon Fraser University
Matching Synthetic Images Results
(a): Template model showing distance transform; (b): Matching result of proposed scheme; (c): Matching result by GC; (d): Matching result by ICM. (e): Matching result by BP.
: GC : ICM : BP
: LP

July, 11th, 2005 Simon Fraser University
Matching Leaves
July, 11th, 2005 Simon Fraser University
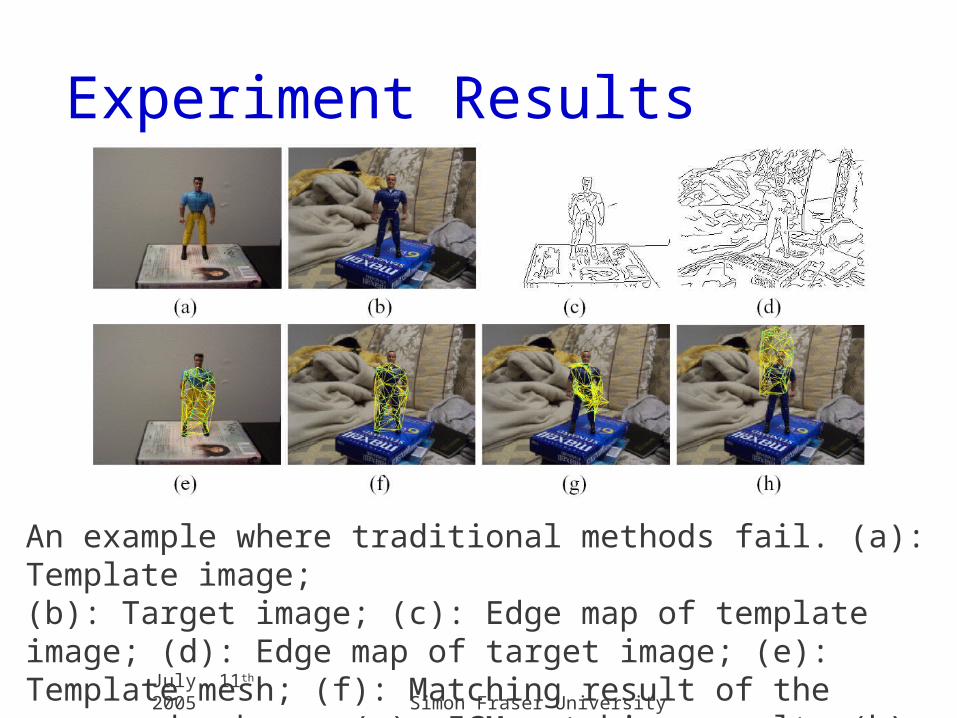
Experiment Results
An example where traditional methods fail. (a): Template image;(b): Target image; (c): Edge map of template image; (d): Edge map of target image; (e): Template mesh; (f): Matching result of the proposed scheme; (g): ICM matching result; (h): Sliding template search result.

July, 11th, 2005 Simon Fraser University
Gesture Recognition Results
Template Top match Second match

July, 11th, 2005 Simon Fraser University
Gesture Recognition Results

July, 11th, 2005 Simon Fraser University
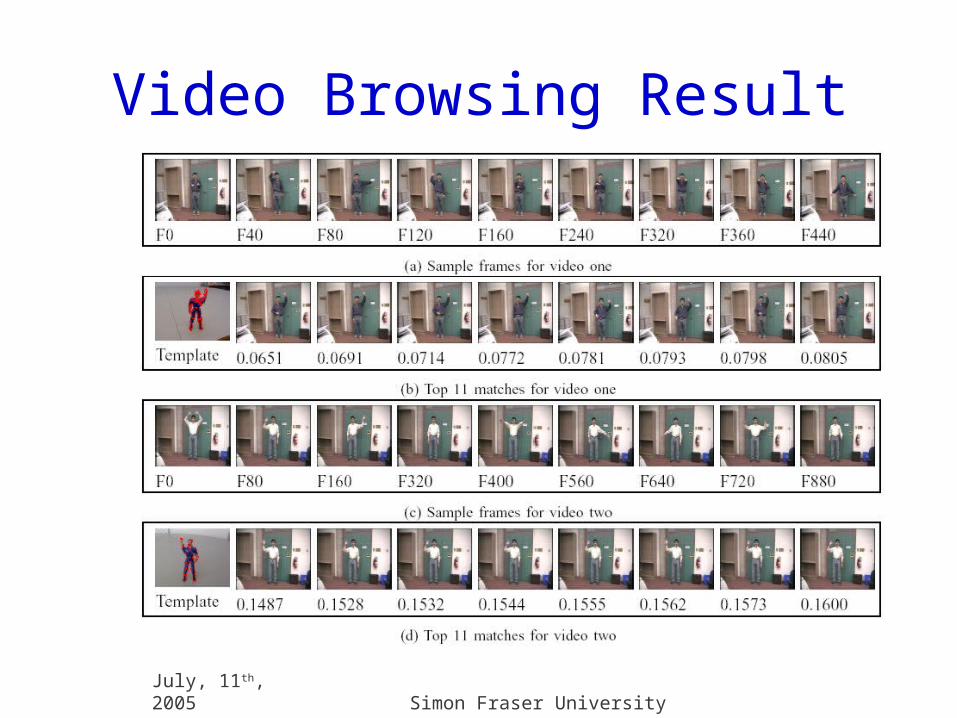
Video Browsing Result
July, 11th, 2005 Simon Fraser University
Video Browsing Result

July, 11th, 2005 Simon Fraser University
Multiple Target Matching Results

July, 11th, 2005 Simon Fraser University
Conclusion and Future Directions
We present a robust matching framework for human posture recognition
The method can be applied to multimedia data retrieval in image or video database, or human computer interaction applications
In future work:– We will add tempera information for behavior
recognition
July, 11th, 2005 Simon Fraser University
Future work
– The successive reconvexification is in fact very general. It can be used to increase the robustness of many other matching schemes, such as BP and GC
– The proposed matching can be used for many other applications, such as tracking, object recongnition, motion estimation etc.

July, 11th, 2005 Simon Fraser University
The End