hi-wire haptic interface with intuitive robot control
TRANSCRIPT

HI-WIREHaptic Interface With Intuitive Robot Control

Introduction
• Design Problem: How to tie robot control to a remote user while maintaining a high level of intuitiveness and simplicity.
• Design Solution: Utilize proximity sensor information to drive a vibration based feedback controller in a modular package.
Feedback Interface Packaging
• Modular Vest Designo Unisex Sizingo Small to Largeo Selectable Node Deploymento 360˚ Node Coverage
• Safety Concernso Electrocution Standardso Flammability Concerns

Vest Construction
Vibration Motors
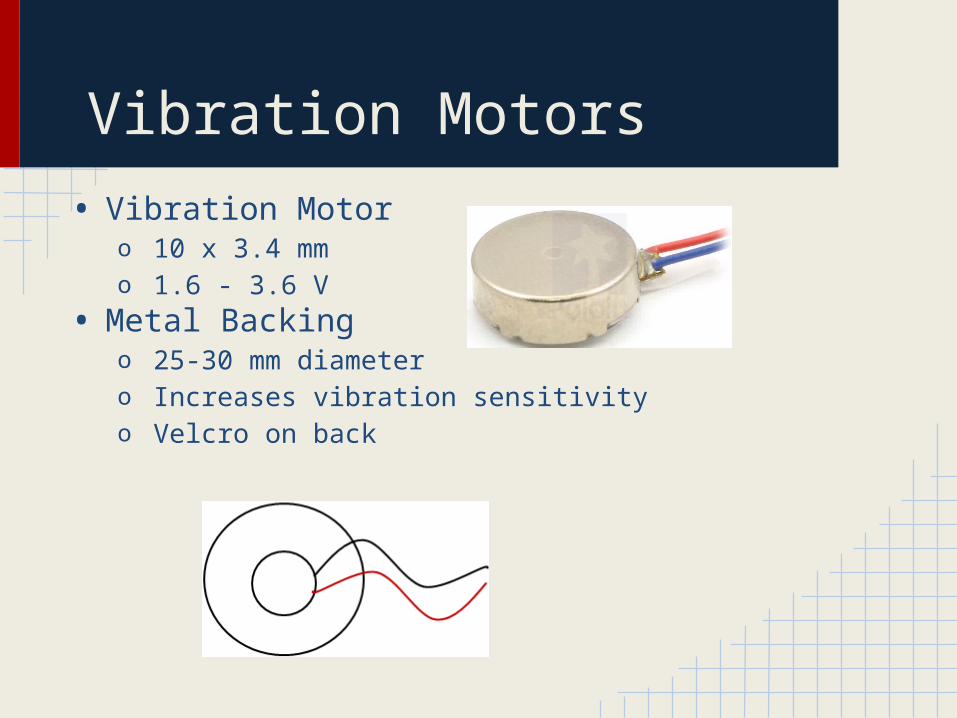
• Vibration Motoro 10 x 3.4 mmo 1.6 - 3.6 V
• Metal Backingo 25-30 mm diametero Increases vibration sensitivityo Velcro on back

Motor Mounts / Wiring
~30 motors
Interchangeable Design
Hidden Wiring

Motor Control
• PWM Signalo Variation of motor intensity
• Problemso Limited pins on Arduino for PWM (only 6)o Too much current draw (>40mA required)
Motor Control (Solution)
• TLC5940NT PWM Drivero Texas Instruments 28-DIP
• Benefitso Up to 16 Channel PWMo Up to 60 mA supplied per Channel
TLC-5940
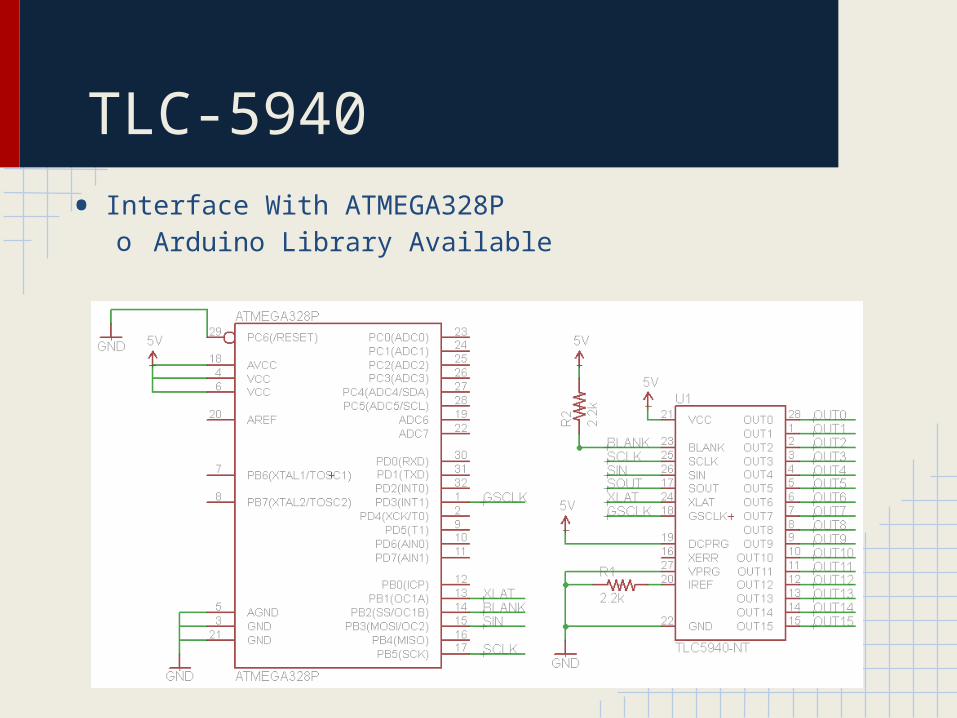
• Interface With ATMEGA328Po Arduino Library Available

Driving Circuit
• Motors Sourced from External 3.6V Power Supplyo 6600mAh, ~ $25 Li-Ion Gives ~2.5 hrs Per Charge
• Simple Switching Circuit o 2N3904 Transistoro Diode for flyback protection

Testing Platform
• Exploratory robot• Sonar sensors
o PING))) Ultrasonic Distance Sensor
FRONT
http://www.parallax.com/tabid/768/ProductID/92/Default.aspx

Testing Platform
• Controlo Arduino UNO microcontrollero PlayStation 3 controller
http://arduino.cc/en/Main/ArduinoBoardUno
http://us.playstation.com/ps3/accessories/dualshock-3-wireless-controller-ps3.html

Testing Platform
• Communicationo XBee Serial Antennao RN-XV WiFly Module
https://www.sparkfun.com/products/8665https://www.sparkfun.com/products/10822
Questions?