gustavo carneiro
DESCRIPTION
The Automatic Design of Feature Spaces for Local Image Descriptors using an Ensemble of Non-linear Feature Extractors. Gustavo Carneiro. Set of Matching Problems. Wide baseline Matching. Visual Class Recognition. Visual Object Recognition. Set of Matching Problems. - PowerPoint PPT PresentationTRANSCRIPT
Gustavo Carneiro
The Automatic Design of Feature Spaces for Local Image Descriptors using an
Ensemble of Non-linear Feature Extractors
Set of Matching Problems
Visual Object Recognition Visual Class Recognition
Wide baseline Matching
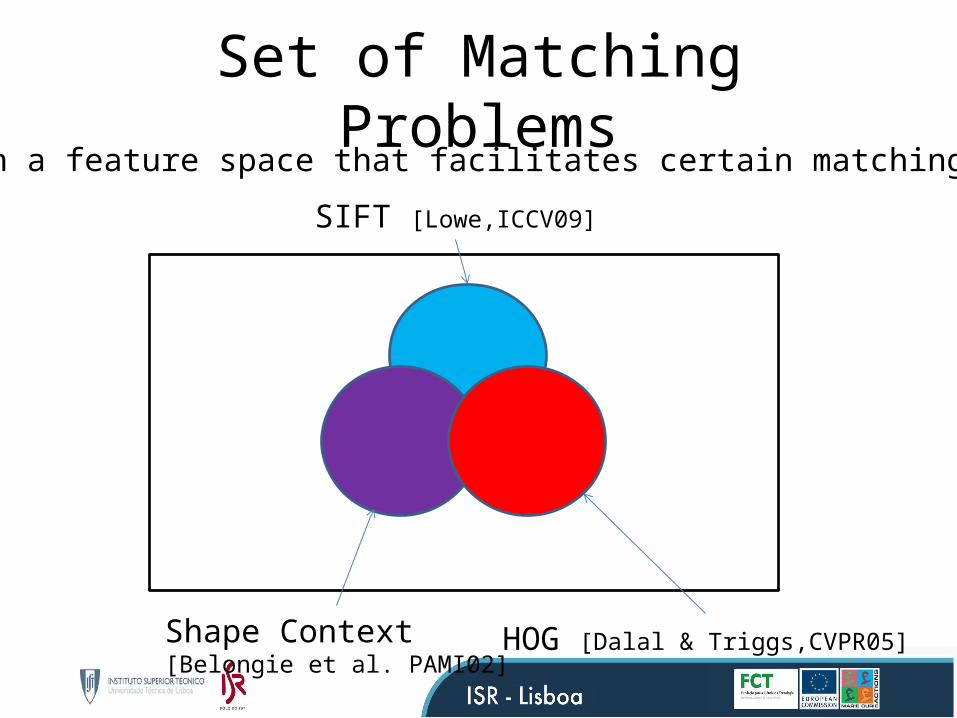
Set of Matching Problems1- Design a feature space that facilitates certain matching problems
SIFT [Lowe,ICCV09]
Shape Context[Belongie et al. PAMI02]
HOG [Dalal & Triggs,CVPR05]
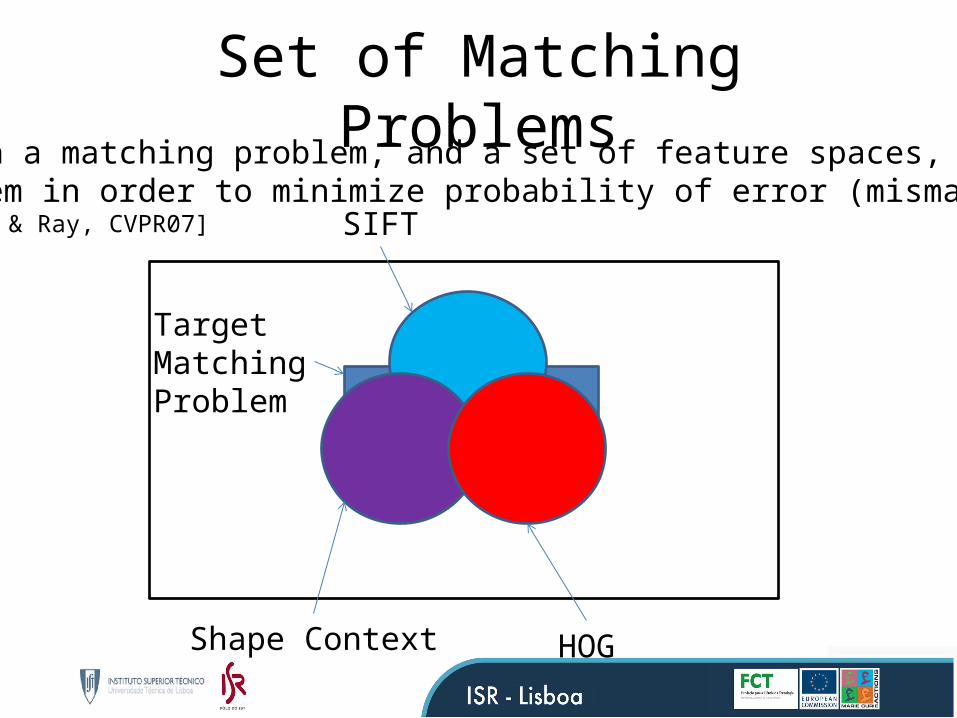
Set of Matching Problems2- Given a matching problem, and a set of feature spaces, combine them in order to minimize probability of error (mismatches) [Varma & Ray, CVPR07]
Target Matching Problem
SIFT
Shape Context HOG
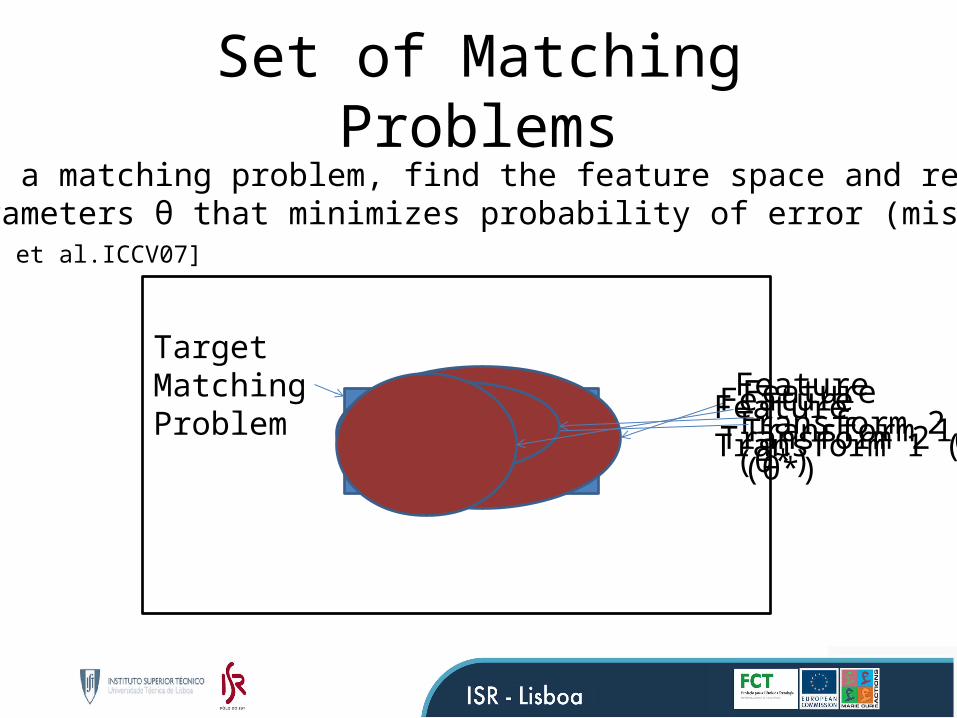
Set of Matching Problems3- Given a matching problem, find the feature space and respective parameters θ that minimizes probability of error (mismatches) [Hua et al.ICCV07]
Target Matching Problem
FeatureTransform 2 (θ*)Feature
Transform 1 (θ)FeatureTransform 2 (θ)
FeatureTransform 1 (θ*)
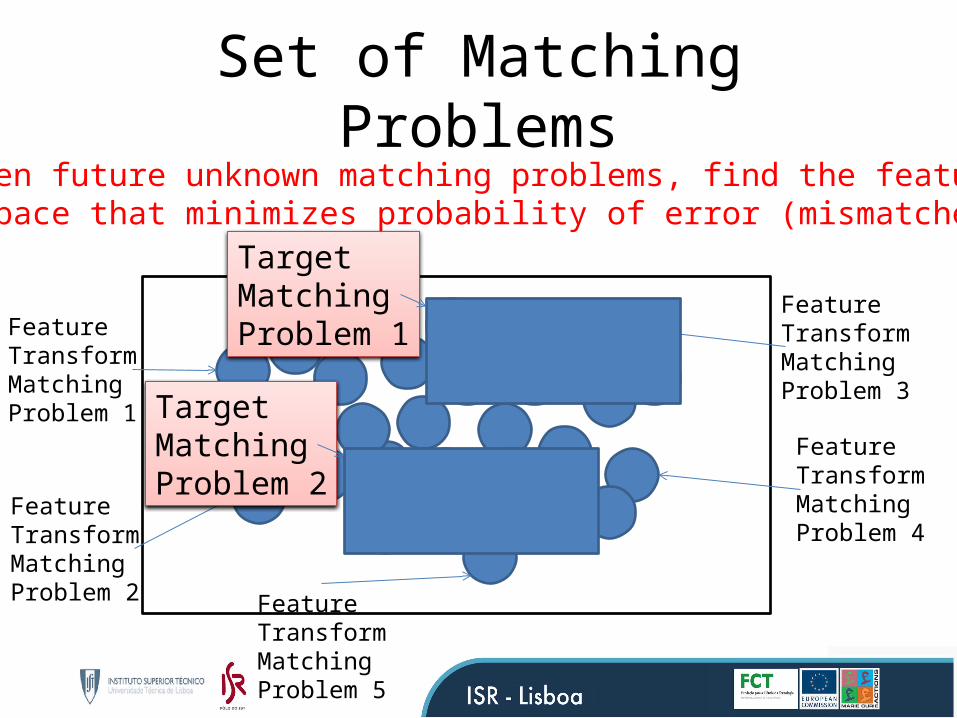
Set of Matching Problems4- Given future unknown matching problems, find the feature space that minimizes probability of error (mismatches)
Feature TransformMatchingProblem 1
FeatureTransformMatchingProblem 2
Feature TransformMatchingProblem 3
FeatureTransformMatchingProblem 4
FeatureTransformMatchingProblem 5
Target Matching Problem 1
Target Matching Problem 2
The Universal Feature Transform
• Solve random and simple matching problems
• The more matching problems solved, the easier it will be to solve new problems
• Restriction: problems should be in similar feature ranges and similar class statistics
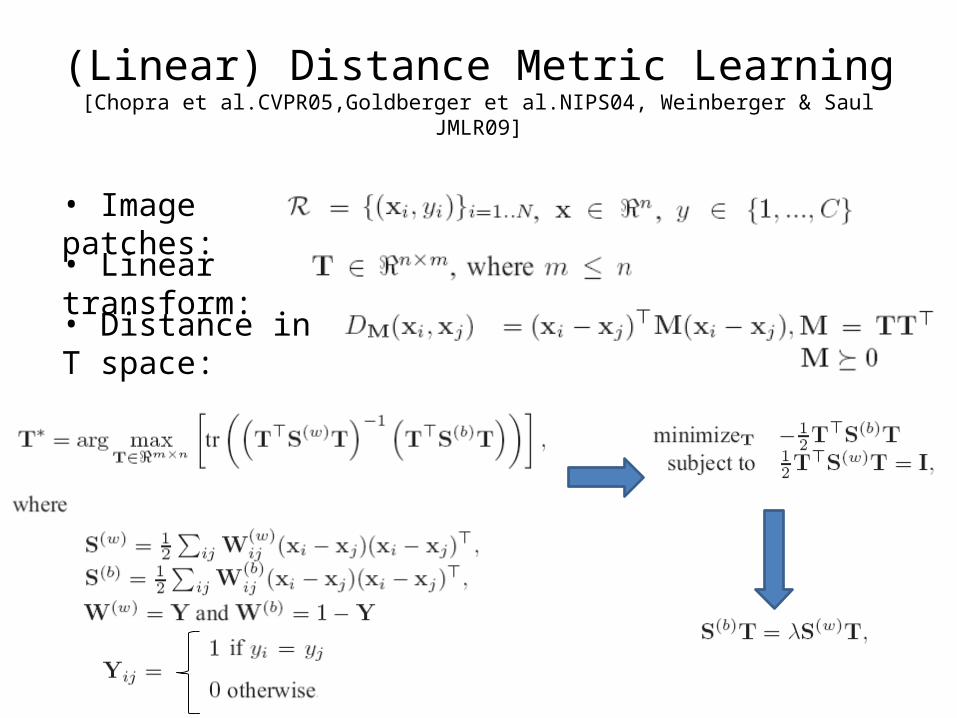
(Linear) Distance Metric Learning[Chopra et al.CVPR05,Goldberger et al.NIPS04, Weinberger & Saul JMLR09]
• Linear transform:
• Image patches:
• Distance in T space:
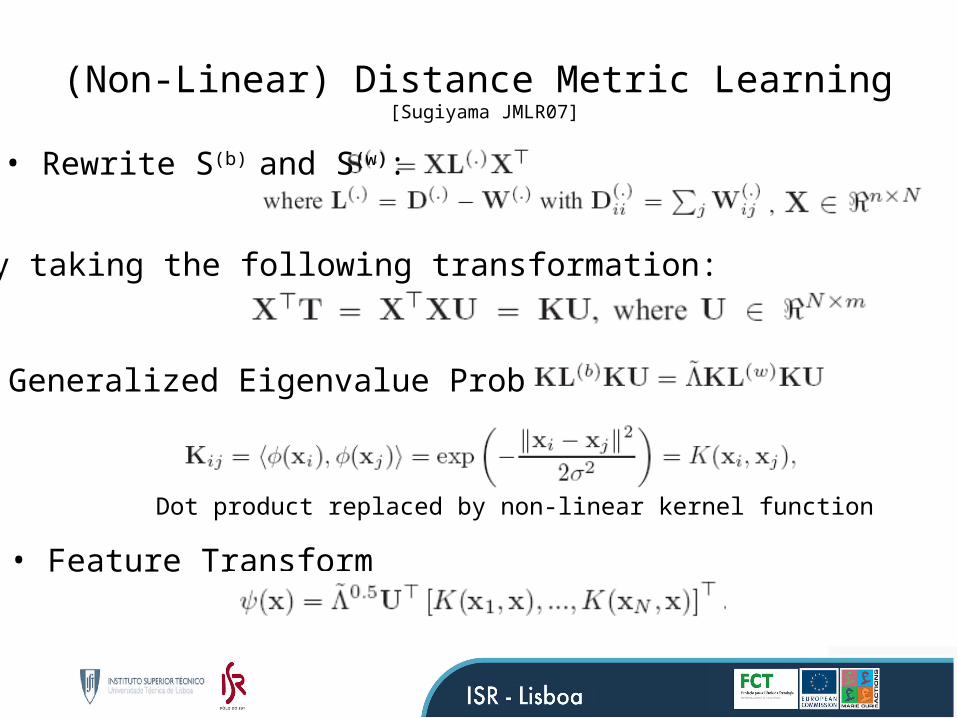
(Non-Linear) Distance Metric Learning [Sugiyama JMLR07]
• Rewrite S(b) and S(w):
• By taking the following transformation:
• Generalized Eigenvalue Problem:
Dot product replaced by non-linear kernel function
• Feature Transform
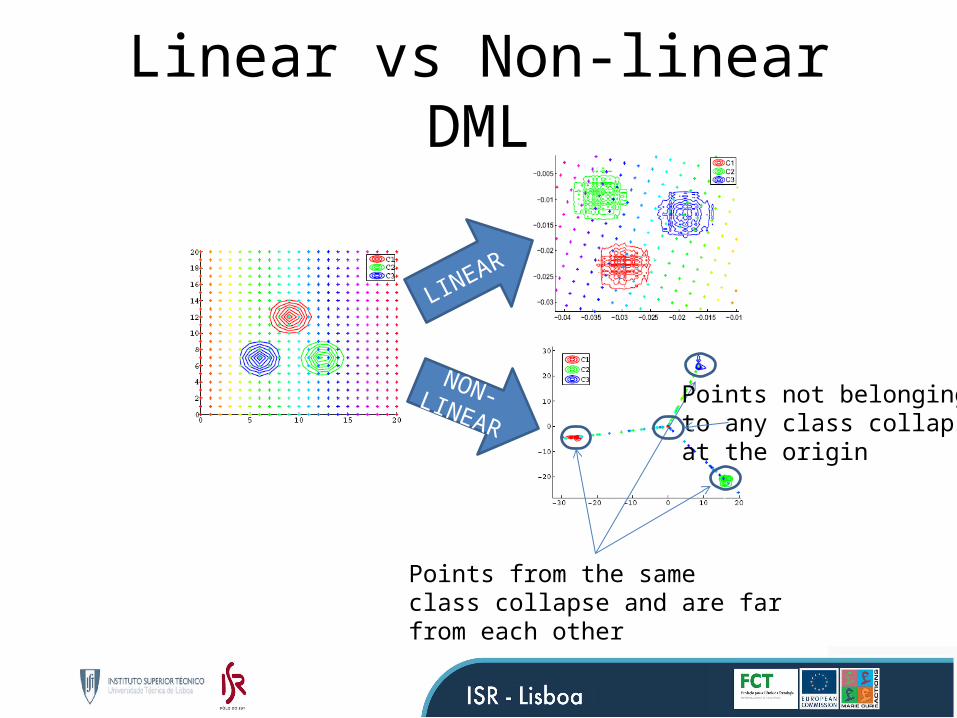
Linear vs Non-linear DML
LINEAR
NON-LINEAR
Points from the sameclass collapse and are farfrom each other
Points not belongingto any class collapse at the origin
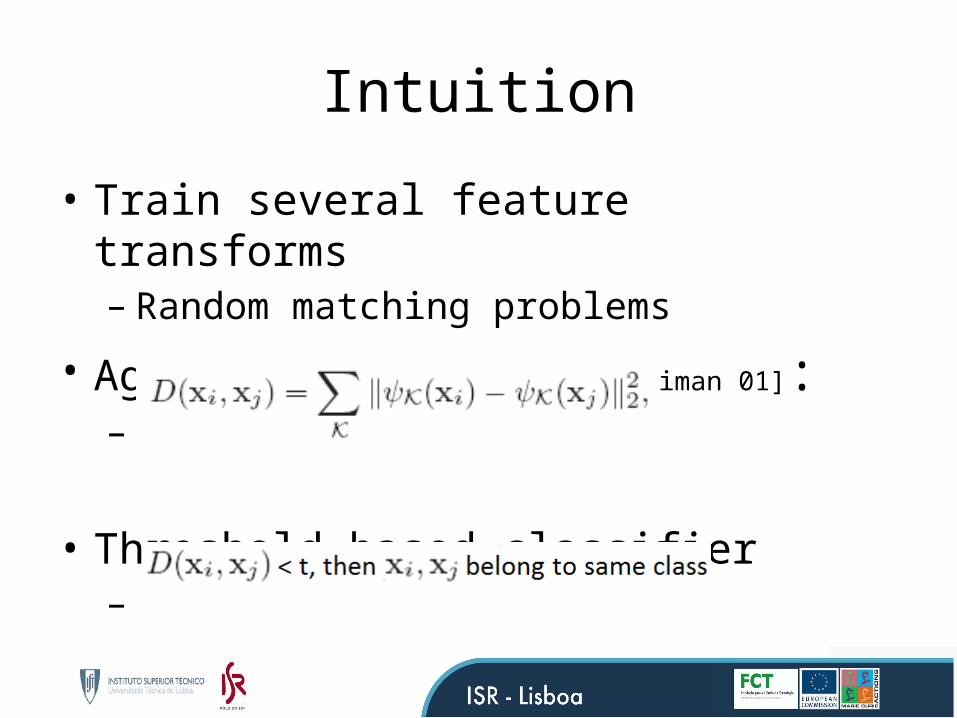
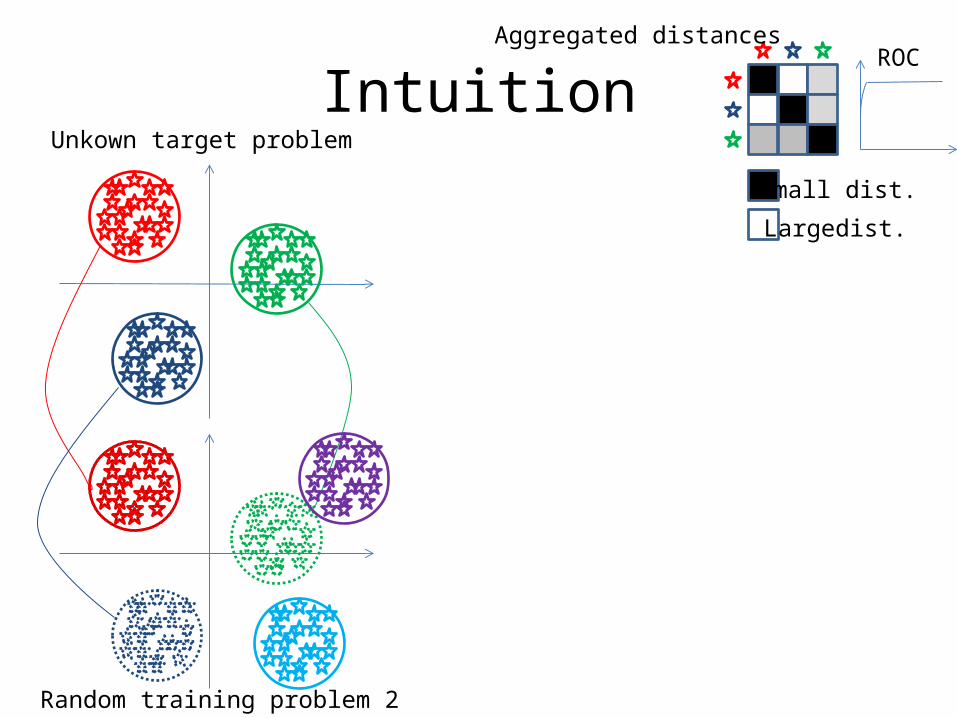
Intuition
• Train several feature transforms– Random matching problems
• Aggregate distances [Breiman 01]: –
• Threshold-based classifier–
T
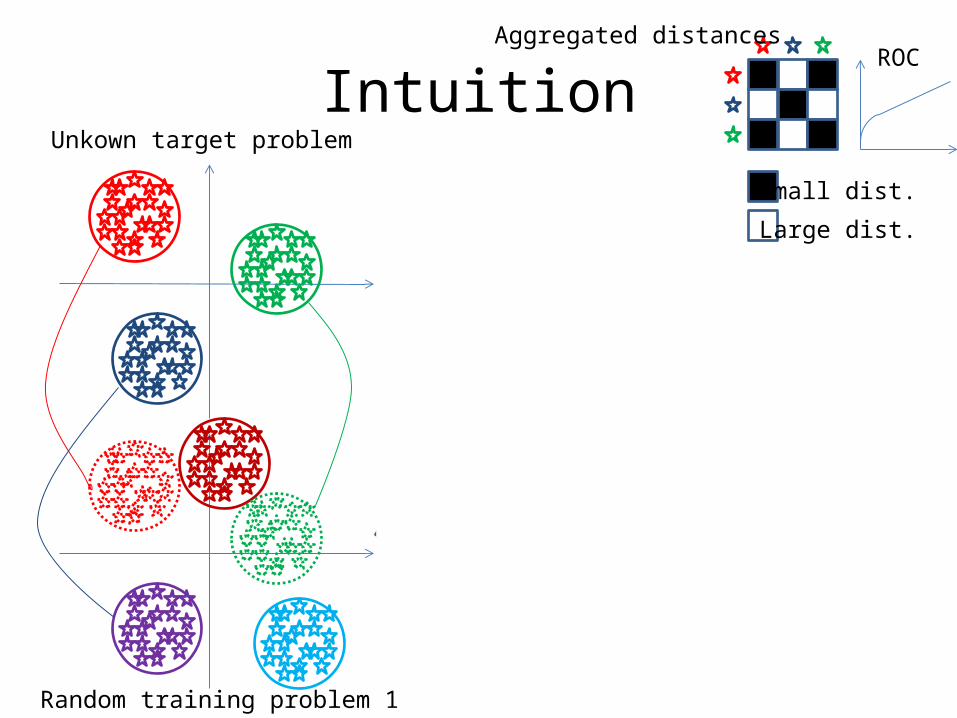
IntuitionUnkown target problem
Random training problem 1
Small dist.
Large dist.
ROCAggregated distances
T
IntuitionUnkown target problem
Random training problem 2
Small dist.
Largedist.
ROCAggregated distances
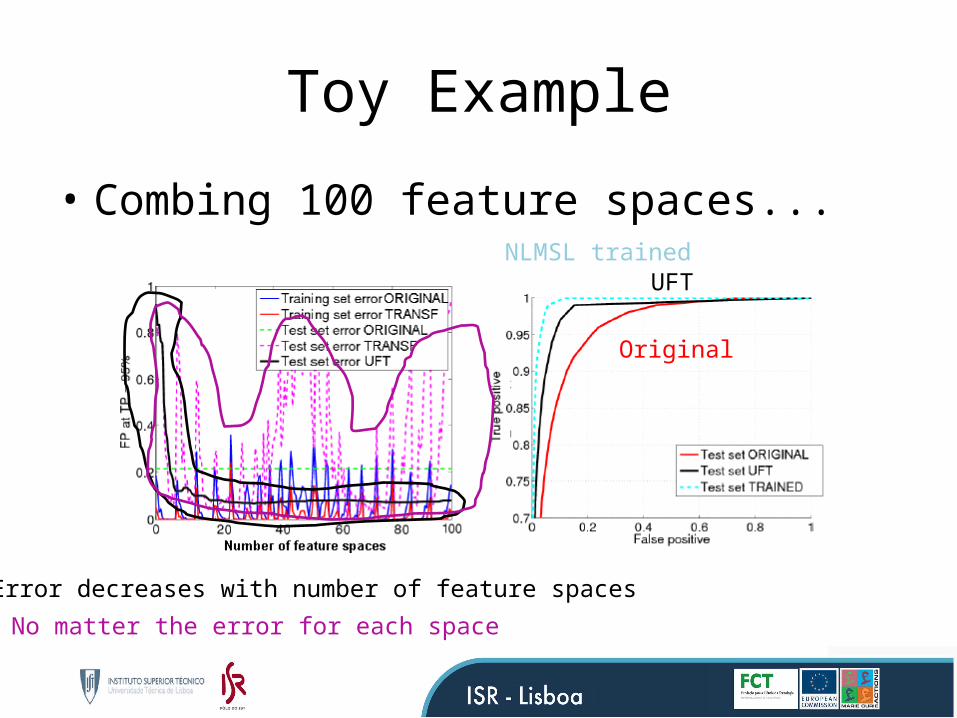
Toy Example
• Combing 100 feature spaces...
Error decreases with number of feature spacesNo matter the error for each space
UFT
Original
NLMSL trained
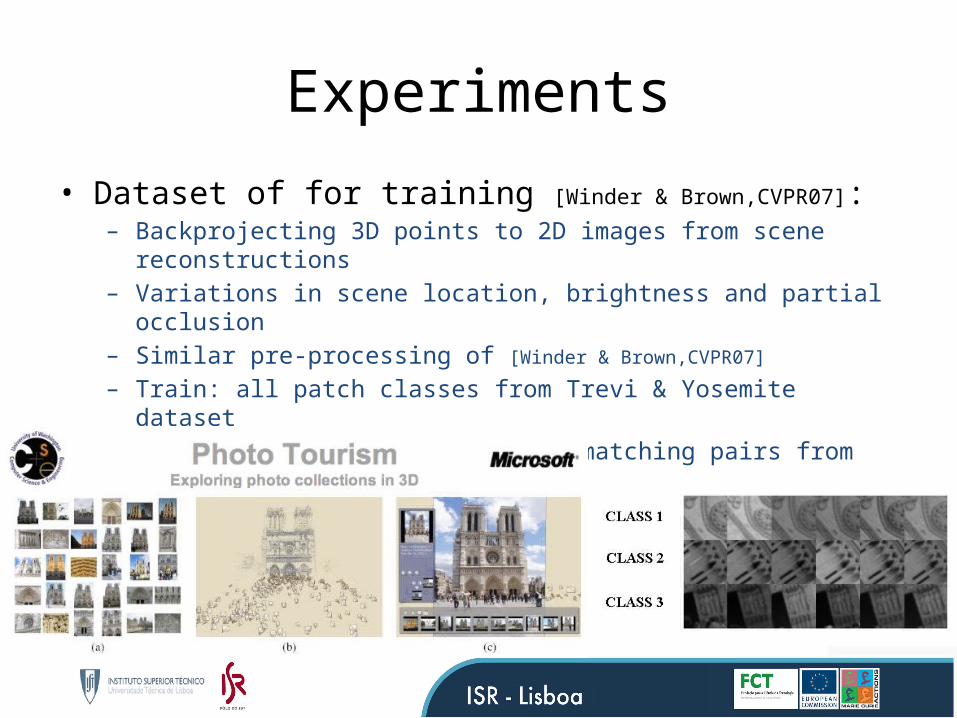
Experiments• Dataset of for training [Winder & Brown,CVPR07]:
– Backprojecting 3D points to 2D images from scene reconstructions – Variations in scene location, brightness and partial occlusion– Similar pre-processing of [Winder & Brown,CVPR07]
– Train: all patch classes from Trevi & Yosemite dataset– Test: 50K matching and 50K non-matching pairs from Notre Dame dataset

Experiments• Using cross validation– 50 training classes for training each feature space– 50 training feature spaces
Error decreases with number of feature spacesNo matter the error in each spaceUFT (2.28%) SIFT (6.3%) @95% TP
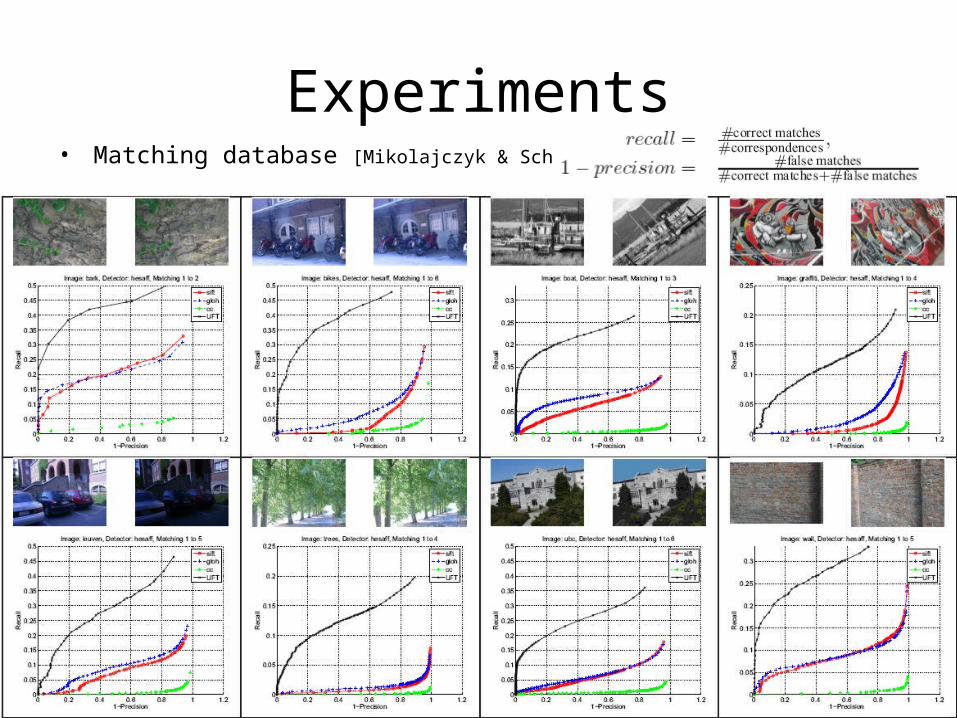
Experiments• Matching database [Mikolajczyk & Schmid,PAMI’05]

Conclusion
• Competitive performance
• Simple ensemble classifier (can be efficiently implemented)
• Adapt to new classification problems (no re-training)
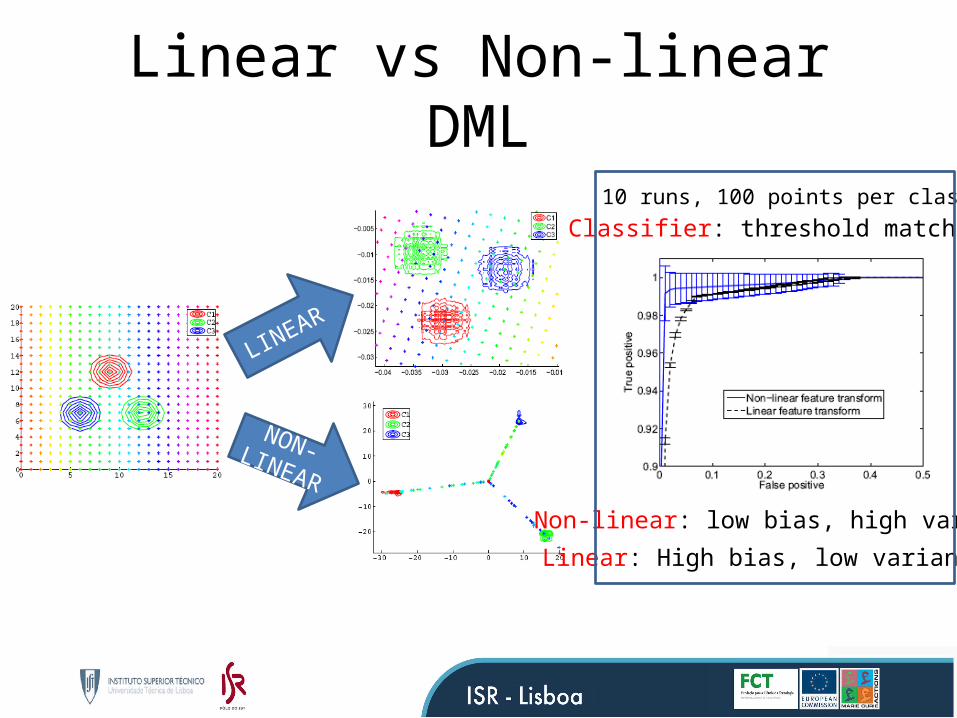
Linear vs Non-linear DML
LINEAR
NON-LINEAR
10 runs, 100 points per classClassifier: threshold matching
Non-linear: low bias, high varianceLinear: High bias, low variance
Combining Feature Spaces
• Breiman’s idea about ensemble classifiers [Breiman 01]: – combine low-bias, high-variance (unstable) classifiers to
produce low-bias, low-variance classifiers.
• Distance