gmv dbhq - cif-ifc.org · ba gmv slv density m2/ha m3/ha x 10 m3/ha x 10 stems/ha x 100 m m cm...
TRANSCRIPT

Opportunities for Research at PRF Building on “State of the Art” Inventories
Murray Woods – Ontario Ministry of Natural Resources & Forestry
GMV
Dbhq
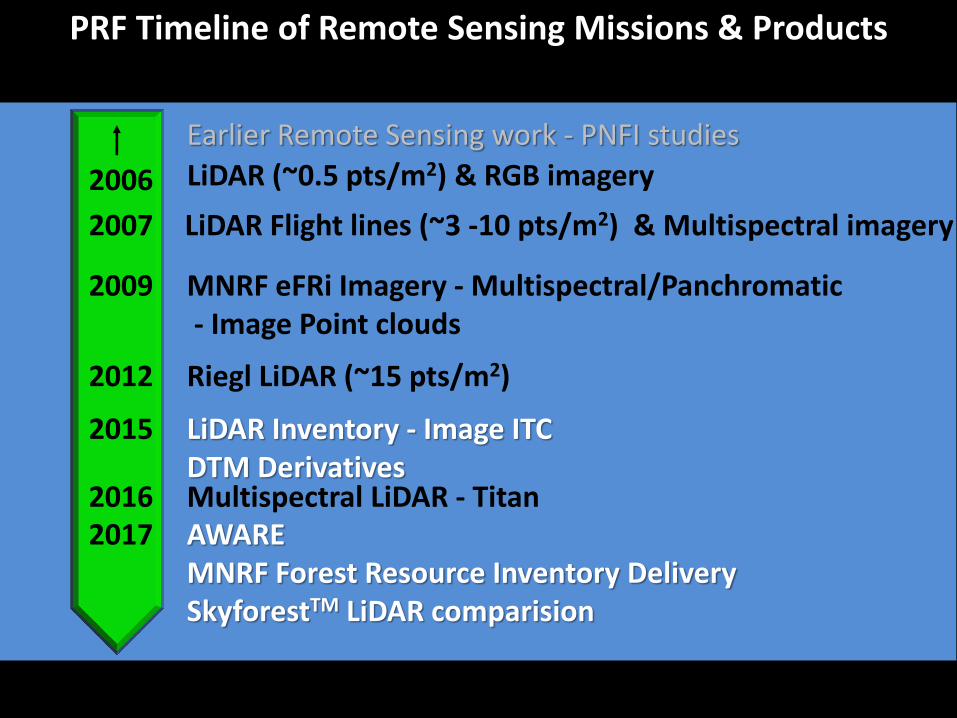
PRF Timeline of Remote Sensing Missions & Products
LiDAR (~0.5 pts/m2) & RGB imagery
LiDAR Flight lines (~3 -10 pts/m2) & Multispectral imagery
MNRF eFRi Imagery - Multispectral/Panchromatic - Image Point clouds
Riegl LiDAR (~15 pts/m2)
Multispectral LiDAR - Titan AWARE MNRF Forest Resource Inventory Delivery SkyforestTM LiDAR comparision
LiDAR Inventory - Image ITC DTM Derivatives
Earlier Remote Sensing work - PNFI studies
2006
2007
2009
2012
2016 2017
2015
2006
2007
2009
2012
2016 2017
2015

• 2006-2016 eFRI production
•Imagery - Leica ADS40/80
•Supporting calibration plots
•Increased number of descriptors
•Ecosite delineation vs. WG
Ontario’s eFRI Program

G048TtD n
Used with permission of Doug Pitt
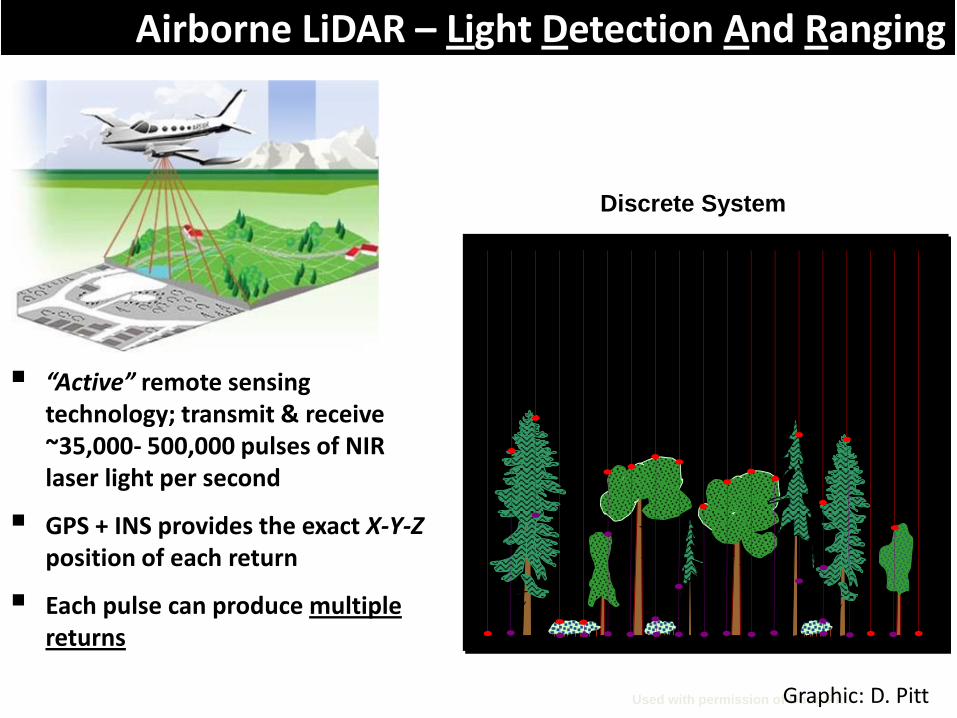
Airborne LiDAR – Light Detection And Ranging
“Active” remote sensing technology; transmit & receive ~35,000- 500,000 pulses of NIR laser light per second
GPS + INS provides the exact X-Y-Z position of each return
Each pulse can produce multiple returns
Discrete System
Graphic: D. Pitt

Area of Interest
Measuring Forest Structure with LiDAR
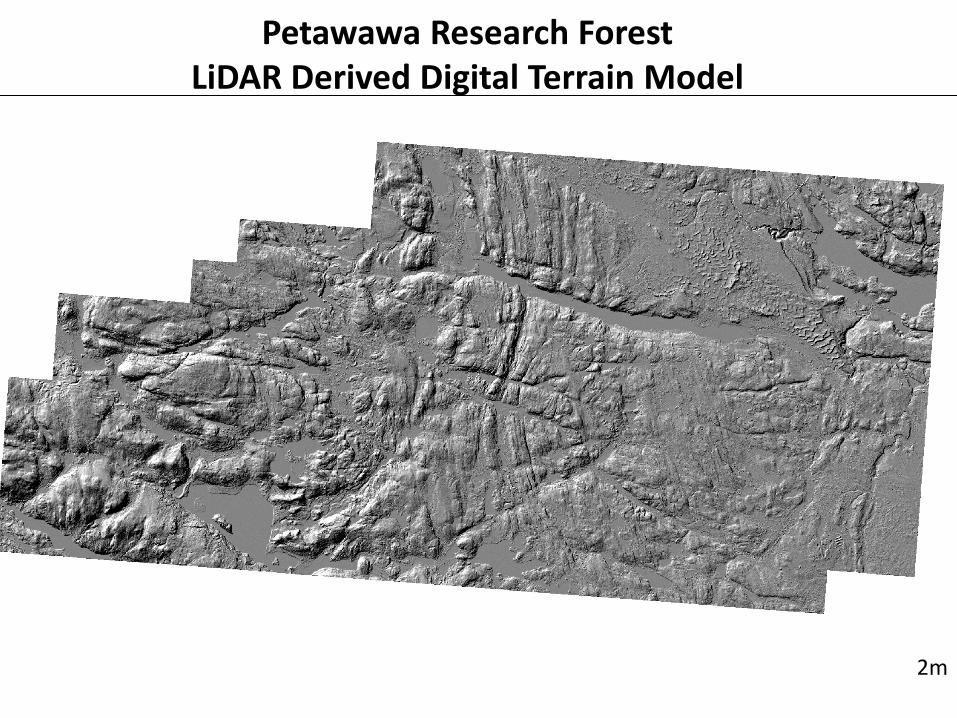
Petawawa Research Forest LiDAR Derived Digital Terrain Model
2m

Advanced
Forest
Resource
Inventory
Technologies
Doug Pitt
CWFC Scientist
Emeritus
Margaret Penner Forest Analysis Ltd.
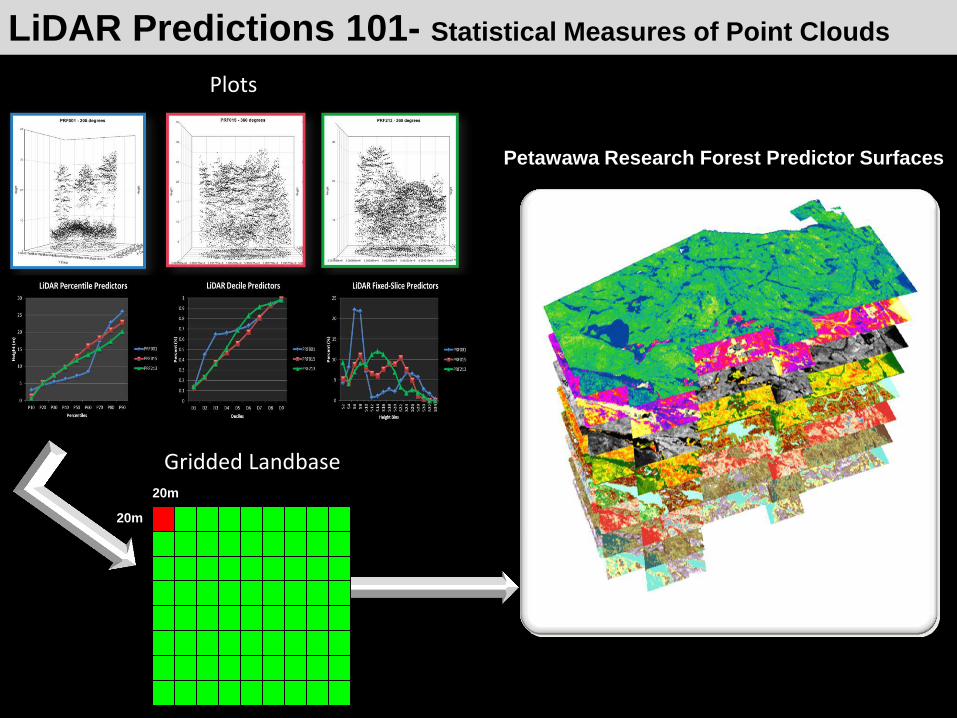
Petawawa Research Forest Predictor Surfaces
20m
20m
LiDAR Predictions 101- Statistical Measures of Point Clouds
Plots
Gridded Landbase

• Height (D-C,Top, Lorey) • DBHq • Volume (GTV, GMV) • Basal area • VBAR (Poles, Sawlogs) • Biomass/Carbon • Density
LiDAR predictive Models for:
• Mean Tree GMV • Size Class Distributions • Canopy Height • Crown Closure • Vertical Structure
Pre
dic
ted
Observed
LiDAR Derived Inventory
All Data
No species information known or needed!

PRF Inventory Rasters
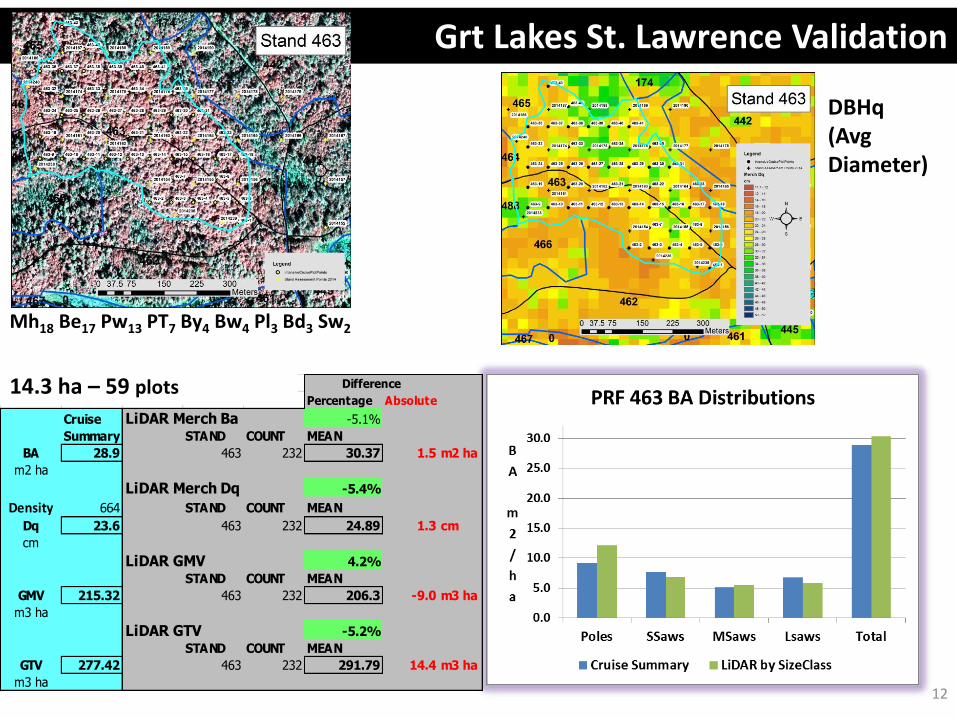
Grt Lakes St. Lawrence Validation
Mh18 Be17 Pw13 PT7 By4 Bw4 Pl3 Bd3 Sw2
12
DBHq (Avg Diameter)
Percentage Absolute
Cruise LiDAR Merch Ba -5.1%
Summary STAND COUNT MEAN
BA 28.9 463 232 30.37 1.5 m2 ha
m2 ha
LiDAR Merch Dq -5.4%
Density 664 STAND COUNT MEAN
Dq 23.6 463 232 24.89 1.3 cm
cm
LiDAR GMV 4.2%
STAND COUNT MEAN
GMV 215.32 463 232 206.3 -9.0 m3 ha
m3 ha
LiDAR GTV -5.2%
STAND COUNT MEAN
GTV 277.42 463 232 291.79 14.4 m3 ha
m3 ha
Difference14.3 ha – 59 plots
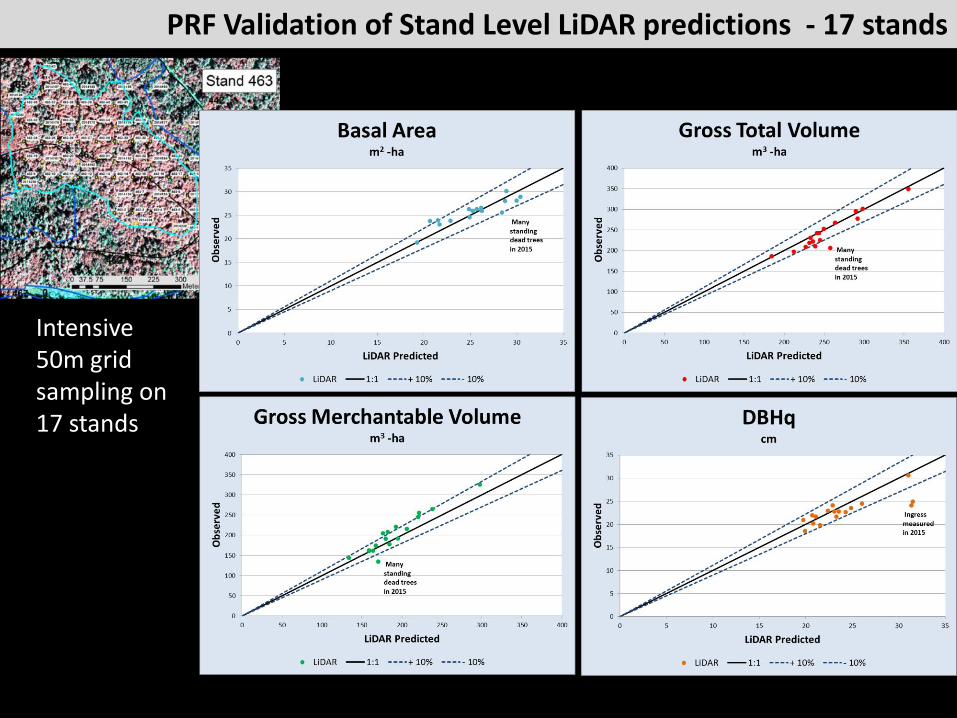
PRF Validation of Stand Level LiDAR predictions - 17 stands
Intensive 50m grid sampling on 17 stands
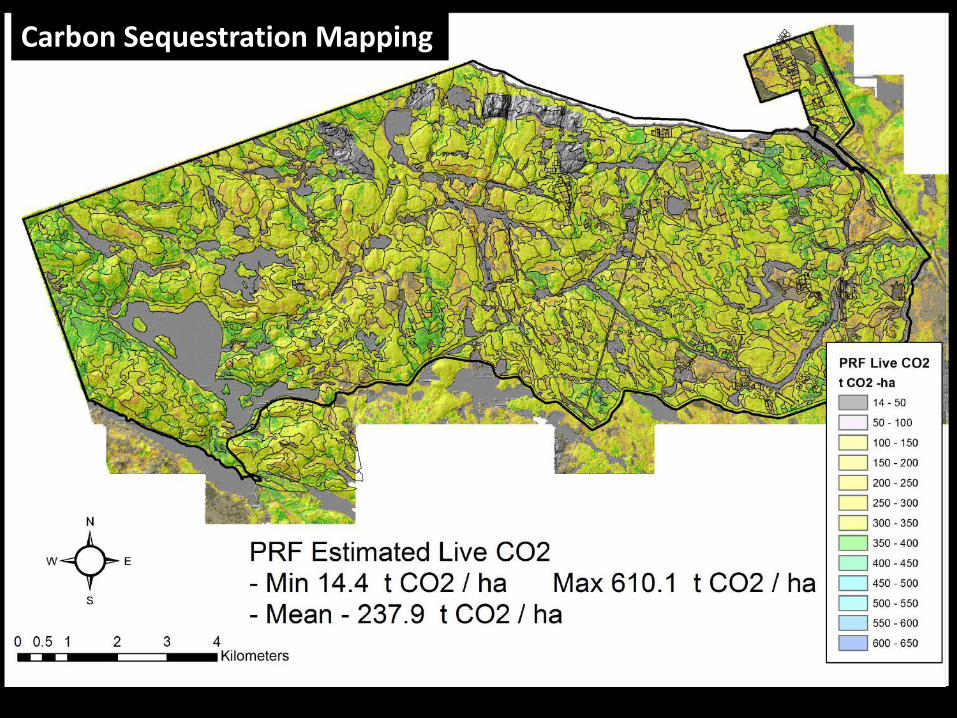
Carbon Sequestration Mapping
Innovative Remote Sensing Technologies
Image Pixel Matching or
Semi Global Matching (SGM) or
Image Point Clouds (IPC)
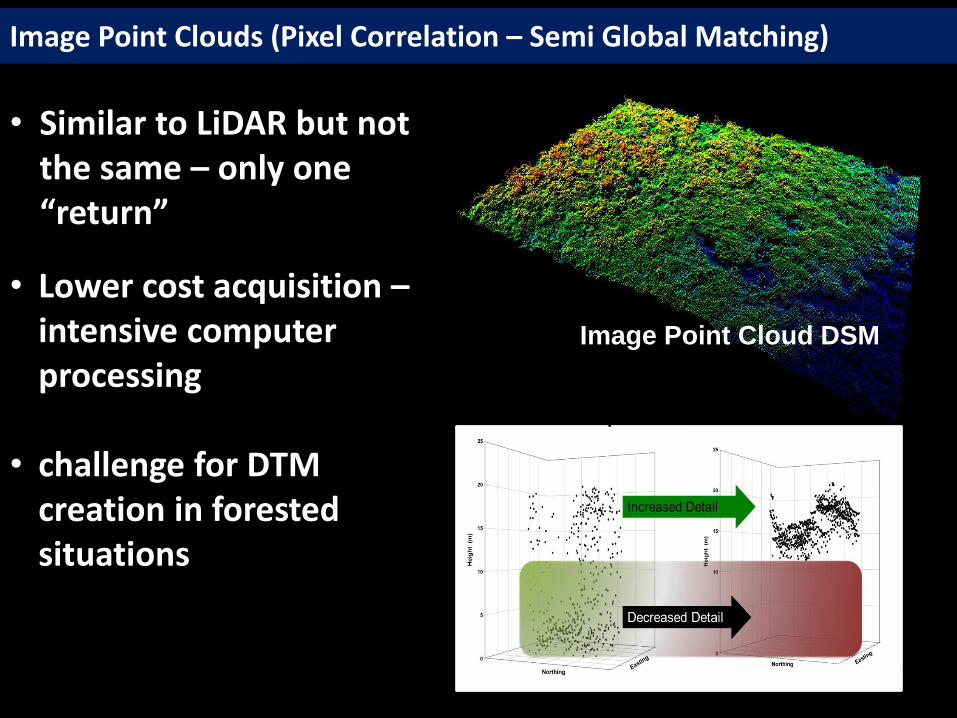
Image Point Cloud DSM
• Similar to LiDAR but not the same – only one “return”
• Lower cost acquisition – intensive computer processing
• challenge for DTM creation in forested situations
Image Point Clouds (Pixel Correlation – Semi Global Matching)

SGM
Hearst Forest Plot Example
Image Point Cloud Inventory Opportunities – WITH detailed DTM
Average stem characteristics
0
10
20
30
40
50
60
70
0
20
40
60
80
100
Top Height D-C Height QM-DBH AGMV
BA GMV SLV Density
m2/ha m3/ha x 10
m3/ha x 10
stems/ha x 100
m m
cm
m3/100
Stand characteristics
Observed
LiDAR-predicted
SGM-predicted
A comparison of airborne LiDAR and digital
photogrammetric point clouds for the area-based
estimation of forest inventory attributes in boreal
Ontario
Doug G. Pitt, Murray Woods, and Margaret Penner
Canadian Journal of Remote Sensing, 40:214-232, 2014
Image Point Clouds SGM
LiDAR
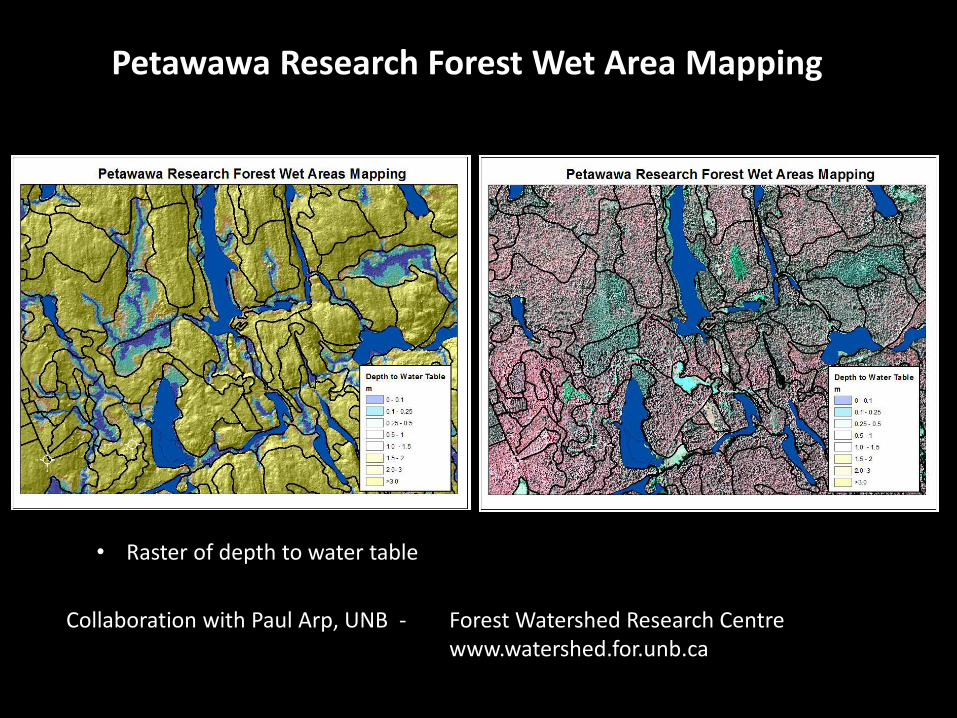
Petawawa Research Forest Wet Area Mapping
Collaboration with Paul Arp, UNB - Forest Watershed Research Centre www.watershed.for.unb.ca
• Raster of depth to water table
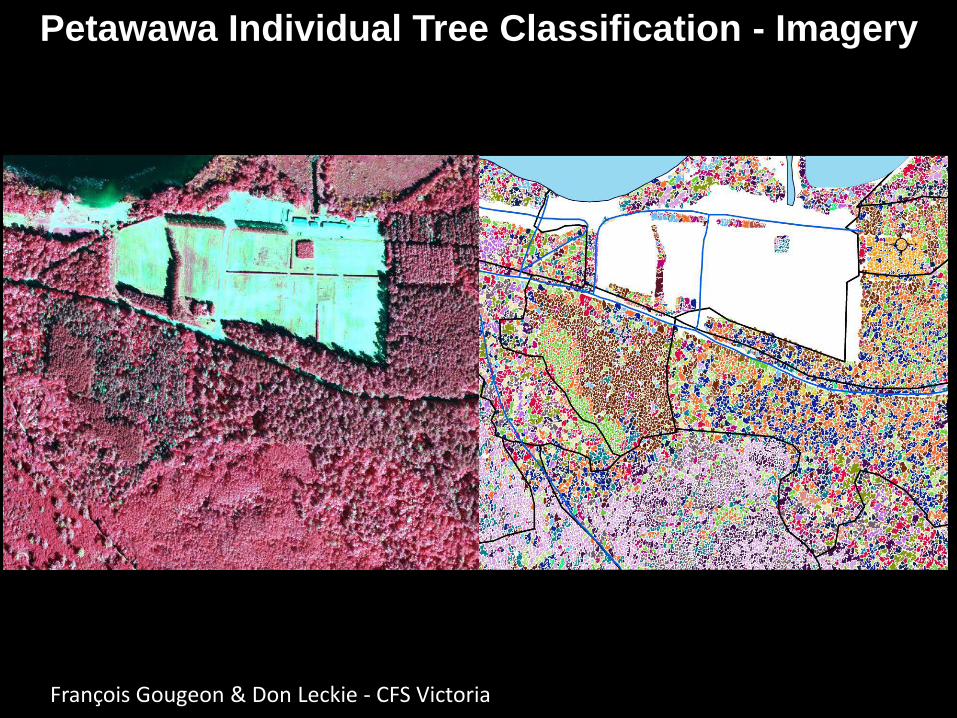
Petawawa Individual Tree Classification - Imagery
François Gougeon & Don Leckie - CFS Victoria

Dense LiDAR – CHM 0.5m - Work with SEGMA – Benoît St.Onge UQAM
Future Inventory Opportunities - LiDAR
New opportunities with higher densities Towards individual tree inventories
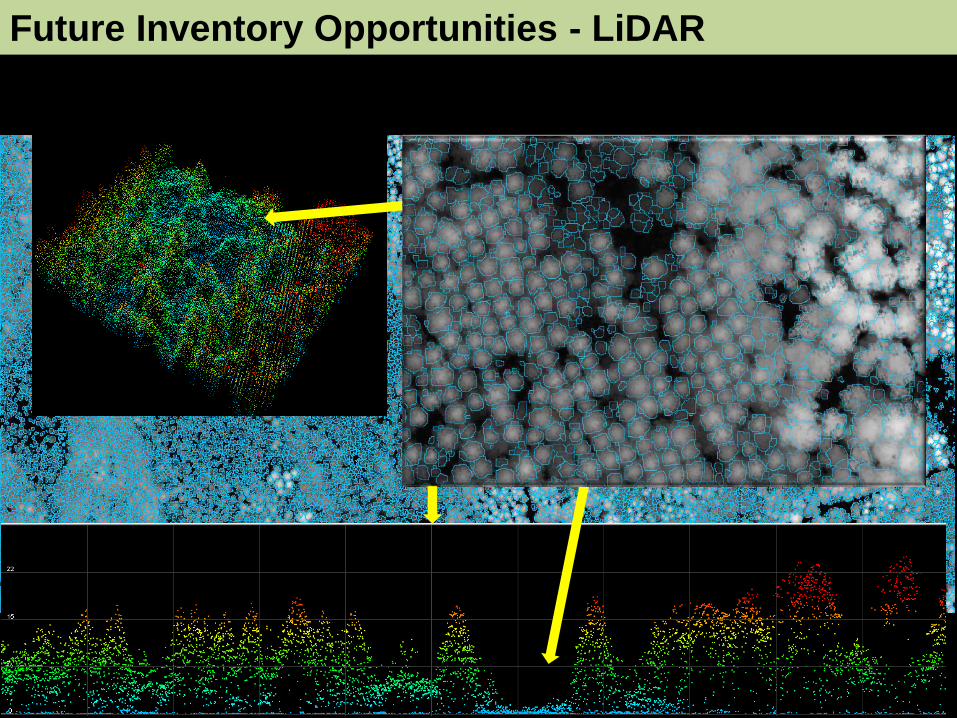
Future Inventory Opportunities - LiDAR

SEGMA (Benoit St-Onge, UQAM)
LiDAR Canopy Height Model Segmentation
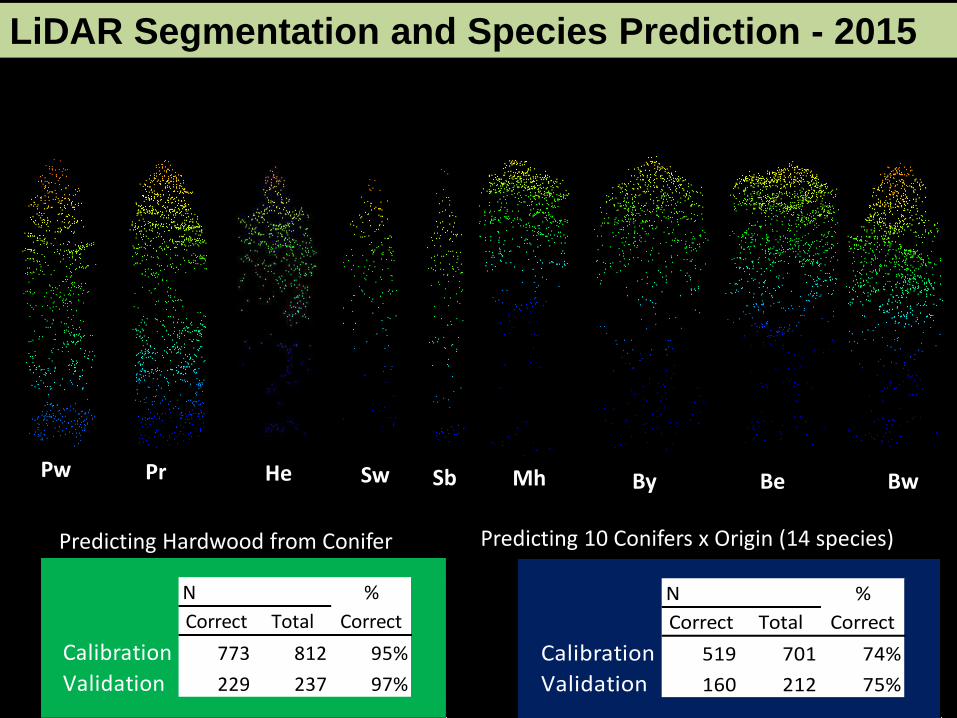
Pr Pw He Sw Sb
LiDAR Segmentation and Species Prediction - 2015
Mh Be Bw By
N %
Correct Total Correct
Calibration 519 701 74%
Validation 160 212 75%
N %
Correct Total Correct
Calibration 773 812 95%
Validation 229 237 97%
Predicting Hardwood from Conifer Predicting 10 Conifers x Origin (14 species)

24
Example of New Brunswick results
Credit: Dr Benoît St-Onge – UQAM (AWARE)
Hardwood vs. Conifer Species Prediction

LiDAR Intensity (Single)
Multispectral LiDAR
New Multispectral LiDAR Technology – Optech Titan
RGB Image
AWARE - Benoit St-Onge, UQAM

Thank You & Looking forward to seeing you at PRF