gerçek zamanlı flyback dönüştürücü tasarımı ve...
TRANSCRIPT

Gerçek Zamanlı FLYBACK Dönüştürücü Tasarımı ve Kontrolü
Real Time FLYBACK Converter Design and Control
Tuğçe Yaren1, Volkan Süel
2, Faruk Fırat
3
1Mekatronik Mühendisliği Bölümü
Kocaeli Üniversitesi, Kocaeli [email protected]
2 Akım Metal A.Ş. , İstanbul
Mekatronik Mühendisliği Bölümü
Kocaeli Üniversitesi, Kocaeli [email protected]
3 Protag Ar-Ge, Kocaeli
Elektronik ve Haberleşme Mühendisliği Bölümü
Kocaeli Üniversitesi, Kocaeli [email protected]
Özetçe
Bu çalışmada, belirlenen tasarım kriterleri göz önünde
bulundurularak bir Flyback dönüştürücü tasarlanmış,
tasarlanan dönüştürücünün analizi yapılmış ve STM32F4
kitinden yararlanılarak dönüştürücünün kontrolü gerçek
zamanlı olarak gerçekleştirilmiştir. Dönüştürücünün
kontrolünde “primer taraf algılama (primary side sensing)”
tekniği kullanılmıştır. Tasarım, analiz ve kontrol olmak üzere
3 temel süreç; pratik bir uygulama ile bir arada ele alınmıştır.
Flyback çeviricilerde kullanılan kontrol teknikleri ve
gerçekleştirilen denetleyici yapısı açıklanmıştır. Deneysel
çalışmalar ve sonuçları verilmiştir. STM32F4 kitinin güç
elektroniği alanındaki kullanılabilirliği, kullanım alanı
oldukça geniş olan bir güç elektroniği devresinin
gerçekleştirilebilirliği, tasarlanan denetleyici yapısının
uygulanabilirliğinin açık ve ayrıntılı bir şekilde ortaya
konması hedeflenmiştir.
Abstract
In this paper, a flyback converter was designed considering
the specified design criteria. Analysis of the designed
converter was implemented. And the converter was controlled
in real time using the STM32F4 kit. “Primary side sensing”
technique was used in the control of the converter. The three
basic processes (design, analysis, control) are handled together
with a practical application. The control techniques which
used in flyback converters and the implemented controller
structure are explained. Experimental studies and results are
given. Clear and detailed description of the usability of the
STM32F4 kit in the power electronics field, the feasibility of a
power electronic circuit which with a very wide range of
applications and the applicability controller architecture that
was designed is intended.
1. Giriş
Dönüştürücüler, akım ve gerilim seviyeleri üzerinde gerekli
değişikliklerin yapılması ile giriş geriliminin kullanıcının
isteği doğrultusunda istenilen seviyeye dönüştürülmesi
işlemini gerçekleştirirler. Dönüştürücü uygulamalarının
kullanım alanları giderek genişlemekte dolayısıyla önemi de
her geçen gün artmaktadır. DC – DC dönüştürücüler cep
telefonu, laptop gibi bataryadan beslenen cihazlar, beyaz eşya
vb. gibi evde kullanılan elektronik eşyaların ana kartları,
mekanik sistemlerin panoları gibi daha birçok önemli yerde
kullanılmaktadır.
Anahtarlamalı çalışan dönüştürücü yapılarında giriş
gerilimi bir endüktansın veya trafonun uçları arasına belli bir
zaman diliminde uygulanır. Kaynağın açık – kapalı olduğu
zaman dilimleri ayarlanarak çıkış gerilimi istenen seviyede
tutulabilir. Böylece gücün verimli bir şekilde kullanılması
sağlanmış olur. Burada kritik nokta anahtarlama işlemidir, bu
işlemin hassas ve doğru biçimde yapılması gerekmektedir.
Yapılan istatistiklere göre her yıl oluşturulan yeni
topolojilerle birlikte mevcut 500’den fazla DC/DC çevirici
topolojisi vardır [1]. İstenen DA çıkış değerleri birçok
dönüştürücü topolojisi ile elde edilebilir. Ancak anahtarlama
elemanlarının anma değerleri ile trafonun anma değerleri ve
boyutları nedeniyle her bir topolojinin çalışmasının uygun
olduğu güç sınırları bulunur. Topoloji seçimi çoğunlukla çıkış
güç değerlerine göre yapılır.
Dönüştürücülerdeki temel sınıflandırma izoleli ve izolesiz
dönüştürücüler şeklinde yapılmaktadır. Flyback ise izoleli
dönüştürücülerden biridir. Flyback, düşük çıkış gücüne sahip
uygulamalarda en yaygın olarak kullanılan izoleli
anahtarlamalı güç elektroniği topolojisidir [2]. Bu topoloji
küçük güçlü güç kaynaklarında (tüplü televizyonların güç
kaynaklarında), telefon şarj aletlerinde, iç aydınlatma
545
Otomatik Kontrol Ulusal Toplantısı, TOK 2017, 21 – 23 Eylül, Yıldız Teknik Üniversitesi, İstanbul

armatürlerinde, yalıtımlı sürücü devrelerinde yaygın olarak
kullanılmaktadır.
Flyback topolojisi ile geniş giriş gerilim aralığında, birden
fazla çıkış elde edilmesi mümkündür. Çıkış gerilimi giriş
gerilim seviyesinden büyük veya küçük olabilir. Ayrıca pozitif
veya negatif çıkış gerilimi elde edilebilir. Yapısı basit ve
maliyeti düşüktür çünkü diğer topolojilere göre kullanılan
eleman sayısı azdır. Çıkış filtresinde bobin yoktur ve devrede
manyetik eleman olarak sadece trafo bulunmaktadır [3]. Giriş
ve çıkış gerilimi arasında yalıtım olması önemli bir avantaj
sağlamaktadır. Bu avantajlardan dolayı flyback dönüştürücü
sık tercih edilen dönüştürücüler arasındadır [4].
Bu çalışmada belirlenen tasarım kriterlerine göre bir
flyback dönüştürücü tasarımı gerçekleştirilmiş ve tasarımın
baskı devresi hazırlanmıştır. Hazırlanan baskı devre üzerinden
dönüştürücünün açık çevrim cevapları osiloskoptan
gözlenmiş, sinyallerin doğruluğu incelenmiştir. Son olarak
devreye kontrol ünitesi eklenmiş ve dönüştürücünün kapalı
çevrim kontrolü gerçekleştirilmiştir.
2. Flyback Dönüştürücünün Analizi
2.1. Çalışma Yapısı
Şekil 1’de temel flyback topolojisi görülmektedir. Görüldüğü
üzere trafo sargıları birbirlerine göre ters polaritededir. Yani
bir sargıdan akım geçerken diğer sargıdan akım geçmeyecek
şekilde ters kutuplanırlar.
Şekil 1: Flyback Dönüştürücü Devresi.
Devrede kontrollü bir anahtarlama elemanı mevcuttur.
Kontrollü anahtarlama elemanına PWM sinyali uygulanarak
istenilen koşullarda anahtarlama yapılması sağlanır. Devrenin
temelinde mosfetin açık ve kapalı konumuna göre çıkışta
ortalama bir gerilim elde edilmesi vardır. Elde edilen gerilim
ise anahtarlama elemanına uygulanan PWM işaretinin doluluk
oranına bağlıdır.
Şekil 2: Örnek PWM Sinyali.
Şekil 2’de örnek bir PWM sinyali görülmektedir. Bu
PWM sinyaline göre anahtarlama elemanı ton süresi boyunca
iletimde toff süresi boyunca kesimde olacaktır. Bu durumda
devrenin iki ayrı modda çalıştığı açıkça görülmektedir.
Anahtarlama elemanının iletim veya kesimde olma durumuna
göre devrenin çalışma yapısı farklılık göstermektedir.
Anahtar iletimde iken giriş gerilimi primer sargısına
uygulanmakta ve endüktans üzerindeki akım lineer olarak
artmaktadır. Sargıların polaritesinden ve diyotun konumundan
dolayı sekonder sargısından akım akmamakta, sekonder
çıkışındaki diyotta ters kutuplanıp, kesime gitmektedir. Bu
durumda yük akımı Şekil 3’de görüldüğü üzere çıkıştaki
kapasite tarafından sağlanmaktadır. Lp (primer endüktansı)
uçlarında sabit bir gerilim olduğundan primer akımının artışı
doğrusal olmaktadır [5].
Şekil 3: Anahtarın İletim Durumu[3].
Anahtar kesime gittiğinde ise trafoda biriken enerji
diyotun iletime girmesi ile sekonder endüktansı üzerinden
çıkış yüküne ve kondansatörüne iletilmektedir. Sekonder
akımı doğrusal olarak azalmaktadır. Şekil 4’ de anahtar kesim
durumunda iken devrenin çalışma yapısı görülmektedir.
Şekil 4: Anahtarın Kesim Durumu[3].
Bir periyot boyunca trafonun primer ve sekonder
sargılarının akım ve gerilimlerinin değişimi Şekil 5’de
görülmektedir.
Şekil 5: Primer, Sekonder Akım – Gerilim Dalga Şekilleri.
Bir anahtarlama periyodunda, bobin üzerindeki ortalama
gerilim sıfıra eşit olmaktadır. Primer bobin gerilimi için bu
durum esas alındığında giriş ve çıkış gerilimi arasındaki ilişki
denklem 1’deki gibi elde edilmektedir.
D
D
N
N
V
V
DTT
DT
N
N
T
T
N
N
V
V
TN
NVTV
p
s
in
out
swsw
sw
p
s
off
on
p
s
in
out
off
s
p
outonin
1
(1)
546
Otomatik Kontrol Ulusal Toplantısı, TOK 2017, 21 – 23 Eylül, Yıldız Teknik Üniversitesi, İstanbul
İdeal durumda devrede herhangi bir kayıp olmadığından
verim % 100’dür. Yani giriş gücü ile çıkış gücü eşittir. Bu
eşitlikten yola çıkıldığında ise denklem 2’deki giriş ve çıkış
akımı arasındaki ilişki elde edilmektedir.
D
D
N
N
I
I
V
V
IVIV
PP
p
s
out
in
in
out
outoutinin
outin
1
(2)
Anahtar iletime geçtiğinde primer akımında gerçekleşen
doğrusal artış denklem 3’deki eşitlik ile ifade edilmektedir.
p
inp
L
V
dt
di (3)
İletim süresi sonunda primer sargı bobinindeki akım,
on
p
inp T
L
VI (4)
Primer bobin akımının tepeden tepeye dalgalanma akım
miktarı ise denklem 5’deki gibi bulunmaktadır.
msw
in
p
oninp
on
p
pin
Lf
DV
L
TVI
T
ILV
(5)
Çıkış kondansatör geriliminin tepeden tepeye dalgalanma
gerilim miktarı denklem 6’ da verilmiştir.
outsw
out
out
onout
T
out
out
cCf
DI
C
TIdtI
CV
on
0
)(1
(6)
Depolanan enerji,
2
2
ppILE (7)
Bir periyot sonunda primer sargı bobininde depolanan
enerji,
T
ILP
pp
2
2
(8)
2.2. Çalışma Modları
DC – DC çeviricilerin sürekli, süreksiz, sınır çalışma modları
bulunmaktadır. Aynı devre yapısına rağmen manyetik
endüktansa ve çıkıştaki yüke göre çalışma modları
belirlenmektedir [6]. Anahtarlama elemanın kesimde olduğu
sürede çıkış sargı endüktans akımı sıfır seviyesine kadar düşer
ise süreksiz akım modu (discontinuous current mode-DCM),
düşmez ise sürekli akım modu (continuous current mode-
CCM) oluşmaktadır. Bu iki çalışma modunun verdiği frekans
domeni cevapları çok farklı olduğundan, çeviricinin bu
modlardan sadece birinde çalışması istenmektedir.
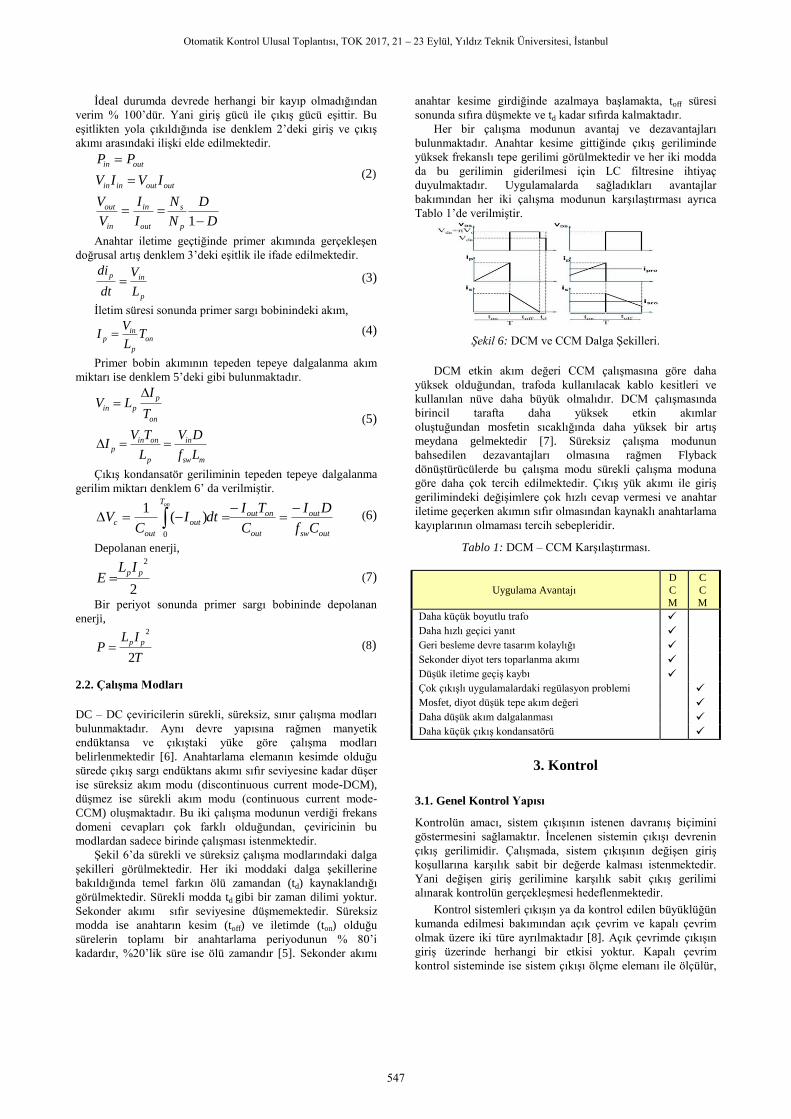
Şekil 6’da sürekli ve süreksiz çalışma modlarındaki dalga
şekilleri görülmektedir. Her iki moddaki dalga şekillerine
bakıldığında temel farkın ölü zamandan (td) kaynaklandığı
görülmektedir. Sürekli modda td gibi bir zaman dilimi yoktur.
Sekonder akımı sıfır seviyesine düşmemektedir. Süreksiz
modda ise anahtarın kesim (toff) ve iletimde (ton) olduğu
sürelerin toplamı bir anahtarlama periyodunun % 80’i
kadardır, %20’lik süre ise ölü zamandır [5]. Sekonder akımı
anahtar kesime girdiğinde azalmaya başlamakta, toff süresi
sonunda sıfıra düşmekte ve td kadar sıfırda kalmaktadır.
Her bir çalışma modunun avantaj ve dezavantajları
bulunmaktadır. Anahtar kesime gittiğinde çıkış geriliminde
yüksek frekanslı tepe gerilimi görülmektedir ve her iki modda
da bu gerilimin giderilmesi için LC filtresine ihtiyaç
duyulmaktadır. Uygulamalarda sağladıkları avantajlar
bakımından her iki çalışma modunun karşılaştırması ayrıca
Tablo 1’de verilmiştir.
Şekil 6: DCM ve CCM Dalga Şekilleri.
DCM etkin akım değeri CCM çalışmasına göre daha
yüksek olduğundan, trafoda kullanılacak kablo kesitleri ve
kullanılan nüve daha büyük olmalıdır. DCM çalışmasında
birincil tarafta daha yüksek etkin akımlar
oluştuğundan mosfetin sıcaklığında daha yüksek bir artış
meydana gelmektedir [7]. Süreksiz çalışma modunun
bahsedilen dezavantajları olmasına rağmen Flyback
dönüştürücülerde bu çalışma modu sürekli çalışma moduna
göre daha çok tercih edilmektedir. Çıkış yük akımı ile giriş
gerilimindeki değişimlere çok hızlı cevap vermesi ve anahtar
iletime geçerken akımın sıfır olmasından kaynaklı anahtarlama
kayıplarının olmaması tercih sebepleridir.
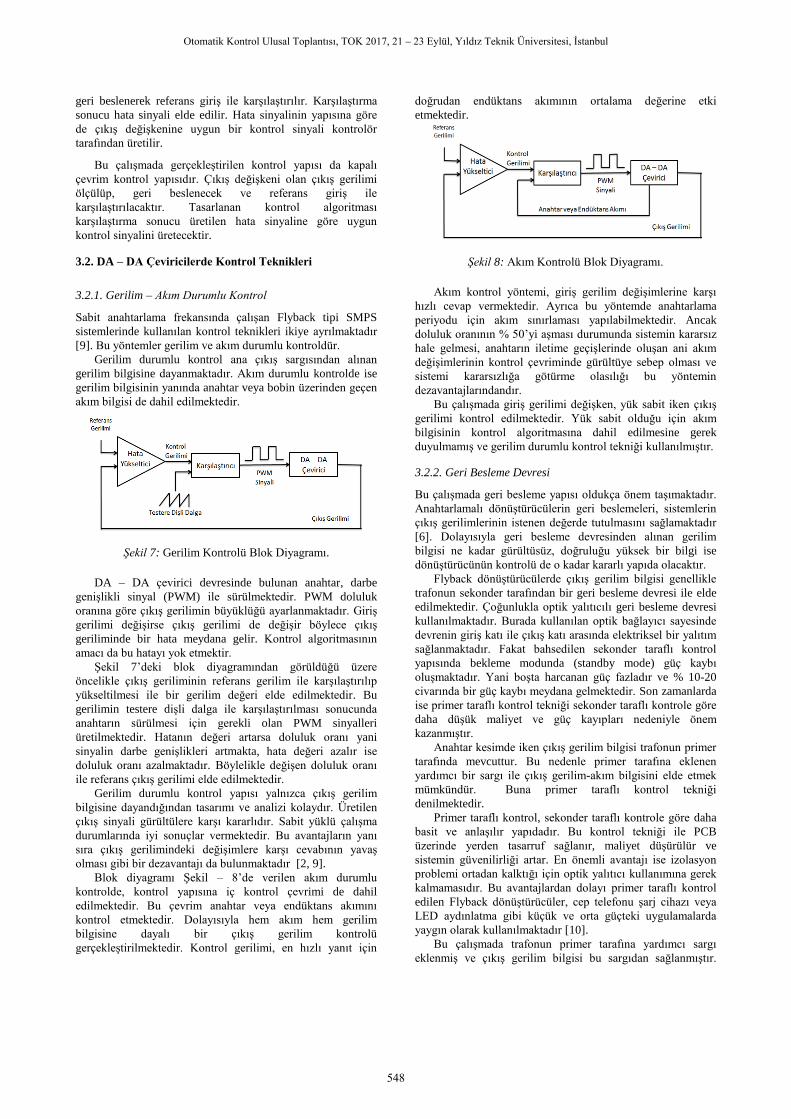
Tablo 1: DCM – CCM Karşılaştırması.
Uygulama Avantajı
D
C
M
C
C
M
Daha küçük boyutlu trafo Daha hızlı geçici yanıt Geri besleme devre tasarım kolaylığı Sekonder diyot ters toparlanma akımı Düşük iletime geçiş kaybı Çok çıkışlı uygulamalardaki regülasyon problemi Mosfet, diyot düşük tepe akım değeri Daha düşük akım dalgalanması Daha küçük çıkış kondansatörü
3. Kontrol
3.1. Genel Kontrol Yapısı
Kontrolün amacı, sistem çıkışının istenen davranış biçimini
göstermesini sağlamaktır. İncelenen sistemin çıkışı devrenin
çıkış gerilimidir. Çalışmada, sistem çıkışının değişen giriş
koşullarına karşılık sabit bir değerde kalması istenmektedir.
Yani değişen giriş gerilimine karşılık sabit çıkış gerilimi
alınarak kontrolün gerçekleşmesi hedeflenmektedir.
Kontrol sistemleri çıkışın ya da kontrol edilen büyüklüğün
kumanda edilmesi bakımından açık çevrim ve kapalı çevrim
olmak üzere iki türe ayrılmaktadır [8]. Açık çevrimde çıkışın
giriş üzerinde herhangi bir etkisi yoktur. Kapalı çevrim
kontrol sisteminde ise sistem çıkışı ölçme elemanı ile ölçülür,
547
Otomatik Kontrol Ulusal Toplantısı, TOK 2017, 21 – 23 Eylül, Yıldız Teknik Üniversitesi, İstanbul
geri beslenerek referans giriş ile karşılaştırılır. Karşılaştırma
sonucu hata sinyali elde edilir. Hata sinyalinin yapısına göre
de çıkış değişkenine uygun bir kontrol sinyali kontrolör
tarafından üretilir.
Bu çalışmada gerçekleştirilen kontrol yapısı da kapalı
çevrim kontrol yapısıdır. Çıkış değişkeni olan çıkış gerilimi
ölçülüp, geri beslenecek ve referans giriş ile
karşılaştırılacaktır. Tasarlanan kontrol algoritması
karşılaştırma sonucu üretilen hata sinyaline göre uygun
kontrol sinyalini üretecektir.
3.2. DA – DA Çeviricilerde Kontrol Teknikleri
3.2.1. Gerilim – Akım Durumlu Kontrol
Sabit anahtarlama frekansında çalışan Flyback tipi SMPS
sistemlerinde kullanılan kontrol teknikleri ikiye ayrılmaktadır
[9]. Bu yöntemler gerilim ve akım durumlu kontroldür.
Gerilim durumlu kontrol ana çıkış sargısından alınan
gerilim bilgisine dayanmaktadır. Akım durumlu kontrolde ise
gerilim bilgisinin yanında anahtar veya bobin üzerinden geçen
akım bilgisi de dahil edilmektedir.
Şekil 7: Gerilim Kontrolü Blok Diyagramı.
DA – DA çevirici devresinde bulunan anahtar, darbe
genişlikli sinyal (PWM) ile sürülmektedir. PWM doluluk
oranına göre çıkış gerilimin büyüklüğü ayarlanmaktadır. Giriş
gerilimi değişirse çıkış gerilimi de değişir böylece çıkış
geriliminde bir hata meydana gelir. Kontrol algoritmasının
amacı da bu hatayı yok etmektir.
Şekil 7’deki blok diyagramından görüldüğü üzere
öncelikle çıkış geriliminin referans gerilim ile karşılaştırılıp
yükseltilmesi ile bir gerilim değeri elde edilmektedir. Bu
gerilimin testere dişli dalga ile karşılaştırılması sonucunda
anahtarın sürülmesi için gerekli olan PWM sinyalleri
üretilmektedir. Hatanın değeri artarsa doluluk oranı yani
sinyalin darbe genişlikleri artmakta, hata değeri azalır ise
doluluk oranı azalmaktadır. Böylelikle değişen doluluk oranı
ile referans çıkış gerilimi elde edilmektedir.
Gerilim durumlu kontrol yapısı yalnızca çıkış gerilim
bilgisine dayandığından tasarımı ve analizi kolaydır. Üretilen
çıkış sinyali gürültülere karşı kararlıdır. Sabit yüklü çalışma
durumlarında iyi sonuçlar vermektedir. Bu avantajların yanı
sıra çıkış gerilimindeki değişimlere karşı cevabının yavaş
olması gibi bir dezavantajı da bulunmaktadır [2, 9].
Blok diyagramı Şekil – 8’de verilen akım durumlu
kontrolde, kontrol yapısına iç kontrol çevrimi de dahil
edilmektedir. Bu çevrim anahtar veya endüktans akımını
kontrol etmektedir. Dolayısıyla hem akım hem gerilim
bilgisine dayalı bir çıkış gerilim kontrolü
gerçekleştirilmektedir. Kontrol gerilimi, en hızlı yanıt için
doğrudan endüktans akımının ortalama değerine etki
etmektedir.
Şekil 8: Akım Kontrolü Blok Diyagramı.
Akım kontrol yöntemi, giriş gerilim değişimlerine karşı
hızlı cevap vermektedir. Ayrıca bu yöntemde anahtarlama
periyodu için akım sınırlaması yapılabilmektedir. Ancak
doluluk oranının % 50’yi aşması durumunda sistemin kararsız
hale gelmesi, anahtarın iletime geçişlerinde oluşan ani akım
değişimlerinin kontrol çevriminde gürültüye sebep olması ve
sistemi kararsızlığa götürme olasılığı bu yöntemin
dezavantajlarındandır.
Bu çalışmada giriş gerilimi değişken, yük sabit iken çıkış
gerilimi kontrol edilmektedir. Yük sabit olduğu için akım
bilgisinin kontrol algoritmasına dahil edilmesine gerek
duyulmamış ve gerilim durumlu kontrol tekniği kullanılmıştır.
3.2.2. Geri Besleme Devresi
Bu çalışmada geri besleme yapısı oldukça önem taşımaktadır.
Anahtarlamalı dönüştürücülerin geri beslemeleri, sistemlerin
çıkış gerilimlerinin istenen değerde tutulmasını sağlamaktadır
[6]. Dolayısıyla geri besleme devresinden alınan gerilim
bilgisi ne kadar gürültüsüz, doğruluğu yüksek bir bilgi ise
dönüştürücünün kontrolü de o kadar kararlı yapıda olacaktır.
Flyback dönüştürücülerde çıkış gerilim bilgisi genellikle
trafonun sekonder tarafından bir geri besleme devresi ile elde
edilmektedir. Çoğunlukla optik yalıtıcılı geri besleme devresi
kullanılmaktadır. Burada kullanılan optik bağlayıcı sayesinde
devrenin giriş katı ile çıkış katı arasında elektriksel bir yalıtım
sağlanmaktadır. Fakat bahsedilen sekonder taraflı kontrol
yapısında bekleme modunda (standby mode) güç kaybı
oluşmaktadır. Yani boşta harcanan güç fazladır ve % 10-20
civarında bir güç kaybı meydana gelmektedir. Son zamanlarda
ise primer taraflı kontrol tekniği sekonder taraflı kontrole göre
daha düşük maliyet ve güç kayıpları nedeniyle önem
kazanmıştır.
Anahtar kesimde iken çıkış gerilim bilgisi trafonun primer
tarafında mevcuttur. Bu nedenle primer tarafına eklenen
yardımcı bir sargı ile çıkış gerilim-akım bilgisini elde etmek
mümkündür. Buna primer taraflı kontrol tekniği
denilmektedir.
Primer taraflı kontrol, sekonder taraflı kontrole göre daha
basit ve anlaşılır yapıdadır. Bu kontrol tekniği ile PCB
üzerinde yerden tasarruf sağlanır, maliyet düşürülür ve
sistemin güvenilirliği artar. En önemli avantajı ise izolasyon
problemi ortadan kalktığı için optik yalıtıcı kullanımına gerek
kalmamasıdır. Bu avantajlardan dolayı primer taraflı kontrol
edilen Flyback dönüştürücüler, cep telefonu şarj cihazı veya
LED aydınlatma gibi küçük ve orta güçteki uygulamalarda
yaygın olarak kullanılmaktadır [10].
Bu çalışmada trafonun primer tarafına yardımcı sargı
eklenmiş ve çıkış gerilim bilgisi bu sargıdan sağlanmıştır.
548
Otomatik Kontrol Ulusal Toplantısı, TOK 2017, 21 – 23 Eylül, Yıldız Teknik Üniversitesi, İstanbul

Böylelikle Flyback dönüştürücüde primer taraflı kontrol yapısı
oluşturulmuştur.
3.3. STM32F4 Geliştirme Kiti
STMicroelectronics firmasının ürünü olan STM32F4
geliştirme kitinin günümüzde kullanımı oldukça yaygındır.
Düşük maliyetli olması, ARM tabanlı yüksek performans
sergilemesi, kolaylıkla programlanabilmesi tercih
sebeplerindendir [11].
STM32F4’ün programlanabilmesi için Matlab –
SIMULINK, Keil, IAR, Attolic, COOCOX gibi birçok yazılım
geliştirme ortamı mevcuttur. Bu çalışmada “Keil” kullanılarak
kitin programlanması gerçekleştirilmiştir. Keil, Cortex-M ve
Cortex-R tabanlı mikroişlemci cihazlar için bir yazılım
geliştirme ortamıdır.
Kontrol yapısı devrenin çıkış gerilim bilgisine
dayanmaktadır. Dolayısıyla bu bilgiye erişim sağlanması
gerekmektedir. Bu erişim de ADC yapısı ile mümkündür.
ADC (Analog to Digital Converter) ile analog bir veri alınıp,
dijital bir veriye dönüştürülür. Yani bu dönüşümden sonra
analog çıkış gerilim bilgisi, işlemcinin anlayabileceği dijital
bir veri haline gelmektedir. Sonuç olarak donanımdan alınan
çıkış bilgisi yazılımsal olarak işleme hazır haldedir.
Çıkış gerilimi, referans gerilim ile karşılaştırılarak, hata
bilgisi elde edilir. Hata bilgisi Şekil 9’da görüldüğü gibi PID
denetleyici yapısında işlenerek sistem için gerekli olan kontrol
sinyali üretilir. Üretilen kontrol sinyali çıkış geriliminin
istenen değere gelmesini sağlayarak, hata bilgisini yok eder.
Şekil 9: PID Denetleyici Yapısı.
Gerçekleştirilen çalışmada kontrol sinyali, mosfetin
anahtarlanması için gerekli olan PWM sinyalidir. Kontrol
algoritması çıkıştan aldığı geri beslemeye göre PWM
sinyalinin doluluk oranını artırıp, azaltarak çıkış gerilimindeki
hatayı yok etmeye çalışır.
Kontrol sinyalinin devreye uygulanması, STM32F4 kitinin
“TIMER” modülü ile gerçekleştirilir. Bu modül ile istenen
frekans ve doluluk oranında PWM sinyali üretilebilir. Kontrol
algoritmasının belirlediği doluluk oranı “TIMER” modülüne
atanır ve bu modülün çıkışı devredeki anahtarlama elemanına
uygulanır.
4. Tasarım ve Analiz
4.1. Devre Tasarımı
Devre tasarımının ilk aşamasında sistem parametrelerinin
belirlenmesi gerekmektedir. Tablo 2’de belirlenen tasarım
kriterleri görülmektedir.
Tablo 2: Tasarım Kriterleri.
Kriter Değer
Giriş gerilim aralığı (Vin) [20-30] V Çıkış gerilimi (Vout) 5 V
Maksimum çıkış akımı (Iout,max) 0.5 A Anahtarlama frekansı (fsw) 65 kHz
Çalışma modu DCM Verim (µ) % 75
Verilen kriterlerden maksimum çıkış gücü hesaplanır. Güç
dönüşüm verimliliğinden de maksimum giriş gücü bulunur.
Bu bilgi de girişten çekilecek maksimum akım değerini
bulmamızı sağlar.
Uygun anahtar seçimi için giriş sargılarından tepe
akımının hesaplanması gerekmektedir. Girişten çekilen
maksimum akım değeri primer akım değerinin DC ortalama
değeridir. Primer akımının tepe değeri ise denklem 9 ile
hesaplanmaktadır.
TDI
Ipeakpr
dcpr max
2
,
,2
(9)
Yukarıdaki denklemden görüldüğü üzere akımın tepe
değerinin hesaplanabilmesi için anahtarın maksimum iletimde
kalma süresinin belirlenmesi gerekmektedir. Dönüştürücü
DCM modda çalışacağı için doluluk oranı 0,5’in altında
olmalıdır. Dolayısıyla maksimum iletimde kalma süresi
0.5’dir. Güvenlik sebebiyle yazılımda üst sınır 0.49 olarak
belirlenmiştir.
Trafonun giriş sargı endüktansı aşağıdaki gibi hesaplanır.
max
min,)(dt
diLV min (10)
Sarım sayıları, tel çapları hesaplanarak kriterlere uygun
trafo tasarımı gerçekleştirilir. Uygun diyot ve kondansatör
seçiminden sonra geri besleme devre elemanları belirlenir ve
tasarım tamamlanır.
4.2. Açık Çevrim Analizi
Tasarlanan Flyback devresi Altium Designer programında
çizilmiş ve baskı devresi hazırlanmıştır.
Şekil 10: Giriş – Çıkış Gerilimi.
549
Otomatik Kontrol Ulusal Toplantısı, TOK 2017, 21 – 23 Eylül, Yıldız Teknik Üniversitesi, İstanbul

Giriş gerilimi 24 V, doluluk oranı % 15 iken devrenin açık
çevrim cevabı incelenmiştir. Bahsedilen koşullarda elde edilen
giriş ve çıkış gerilimi Şekil 10’da görülmektedir. Grafikten
görüleceği üzere birinci kanalın Volts/Div değeri 10.0 V,
dördüncü kanalın ise 500 mV’dur. Bu durumda osiloskop
çıktısından giriş gerilim değerinin 24 V, çıkış gerilim
değerinin ise 1.70 V civarında olduğu görülmektedir.
Şekil 11’de verilen grafikte osiloskobun birinci kanalında
PWM, ikinci kanalında primer akımı, üçüncü kanalında
sekonder akımı, dördüncü kanalında ise mosfet drain-source
gerilimi görülmektedir. Görüldüğü üzere primer akımı anahtar
iletimde iken lineer olarak artmakta, sekonder akımı ise
anahtar kesimde iken lineer olarak azalmaktadır.
Şekil 11: Flyback Açık Çevrim Dalga Şekilleri.
Mosfet kesime gittiği zaman trafonun hava aralığında
depolanan enerji çıkışa aktarılmaktadır. İlk olarak mosfet
kesime girdiğinde mosfet üzerinde giriş gerilimi (Vin),
sekonderden primere yansıyan gerilim (n*Vout) ve kaçak
endüktansta biriken enerjiden kaynaklı aşım gerilimi (Vsn)
görülmektedir. Belli bir süre sonra ise enerjinin tamamı çıkışa
iletilmekte ve mosfet üzerindeki gerilim düşümü giriş
gerilimine eşit olmaktadır. Gerilimin düşmesi ile primer
endüktansı ile mosfet çıkış kapasitansı arasında rezonans
oluşmaktadır. Şekil 11’de mosfet drain-source geriliminde
bahsedilen aşım ve rezonans görülmektedir.
Tablo 3: Örnek Açık Çevrim Sonuçları.
VİN
%
Doluluk
Oranı
VOUT
(Hesaplama)
VOUT
(Ölçüm)
Hata
20V %20 1.625 Vdc 1.77 Vdc + 0.145 V
20V %40 4.330 Vdc 3.85 Vdc - 0.480 V
24V %15 1.560 Vdc 1.68 Vdc + 0.120 V
24V %30 3.350 Vdc 3.56 Vdc + 0.210 V
28V %10 1.100 Vdc 1.31 Vdc + 0.210 V
28V %45 7.445 Vdc 6.27 Vdc - 1.175 V
Tablo 3’de farklı giriş gerilim değeri ve doluluk oranına
göre hesaplanan ve ölçülen çıkış gerilimleri verilmiştir.
Gerçek zamanlı uygulanan Flyback dönüştürücülerde trafonun
giriş ve çıkış sargılarında oluşan kaçak endüktans, mosfet ve
trafo sargılarının oluşturduğu parazitik kapasiteler vardır.
Devrede oluşan bu parazitik etkiler dönüştürücünün açık
çevrim performansını etkilemektedir [12]. Ayrıca sekonder
diyotu üzerinde, çıkış filtrelerinde gerilim düşümü
oluşmaktadır. Bu sebeplerden dolayı açık çevrim cevabında
hesaplanan ve ölçülen çıkış gerilim değerleri arasında hata
meydana gelmektedir. Oluşan hata oranları kabul edilebilir
sınırdadır.
5. Deneysel Sonuçlar
Kontrolörden beklenen belirlenen giriş gerilim aralığında
devre çıkış geriliminin her zaman referans değerde kalmasını
sağlamasıdır. Yani giriş gerilimi değişse bile kontrolörün
devreye girmesi ile çıkış gerilimi sabit kalacaktır.
Şekil 12: Deney Düzeneği.
Kontrolörün algoritmasında işlemesi için gerekli olan
bilgi, devrenin çıkış gerilim bilgisidir. Bu bilgi trafonun
primer tarafına eklenen yardımcı bir sargı tarafından
sağlanmaktadır. Elde edilen çıkış gerilim bilgisi, yapısı daha
önce açıklanan kapalı çevrim kontrol algoritmasında işleme
sokulur. İşlenen bilgiye göre referans değerin elde
edilebilmesi için gerekli olan doluluk oranı belirlenir. Yani
kontrolör, devrenin anahtarlanması için devreye uygulanan
PWM sinyalinin doluluk oranını değiştirerek referans değeri
sağlar. Tasarım kriterlerine göre devrenin DCM modda
çalışması istendiğinden doluluk oranının 0,5’i geçmemesi
gerekmektedir. Yazılımsal olarak da doluluk oranına alt ve üst
limit eklenmiştir.
Devre ile kontrolör arasındaki iletişimi kit sağlamaktadır.
Dolayısıyla STM32F4 kiti ile baskı devre arasında gerekli
bağlantılar sağlanmış ve kontrolör devreye uygulanmıştır.
Kontrolör yapısındaki PI katsayıları Ziegler-Nichols yöntemi
ile elde edilmiştir.
Tablo 4: Kapalı Çevrim Kontrol Sonuçları.
VİN
%
Doluluk
Oranı
VOUT
(Referans)
VOUT
(Ölçüm)
Hata
20V % 48.70 5 Vdc 4.70 Vdc - 0.30 V
21V % 46.70 5 Vdc 4.95 Vdc - 0.05 V
22V % 46.60 5 Vdc 5.00 Vdc 0.00 V
23V % 44.75 5 Vdc 5.02 Vdc + 0.02 V
24V % 42.10 5 Vdc 4.99 Vdc - 0.01 V
25V % 41.00 5 Vdc 5.03 Vdc + 0.03 V
26V % 38.50 5 Vdc 5.02 Vdc + 0.02 V
27V % 37.50 5 Vdc 5.02 Vdc + 0.02 V
28V % 36.85 5 Vdc 4.99 Vdc - 0.01 V
29V % 34.20 5 Vdc 5.05 Vdc + 0.05 V
30V % 33.30 5 Vdc 5.03 Vdc + 0.03 V
Şekil 12’de görülen deney düzeneğine giriş gerilim
aralığındaki tüm değerler sırası ile uygulanmış ve kontrolörün
performansı incelenmiştir. Tablo 4’de elde edilen sonuçlar
verilmiştir. Görüldüğü üzere çıkış gerilimi yaklaşık 5 V
550
Otomatik Kontrol Ulusal Toplantısı, TOK 2017, 21 – 23 Eylül, Yıldız Teknik Üniversitesi, İstanbul
civarında sabitlenmiştir. Referans ve ölçülen gerilim
arasındaki hata değerleri oldukça düşüktür. Doluluk
oranlarının değişimi de tablodan açıkça görülmektedir. Yani
kontrolör, doluluk oranlarını değiştirerek referans değerin elde
edilmesini başarıyla sağlamıştır. Ayrıca devreye 10 ayrı giriş
geriliminin uygulanması ile elde edilen çıkış bilgilerine
dayanarak kontrol yapısının kararlı olduğu da söylenebilir.
Kontrolör performansının daha da anlaşılır olması
açısından 24 ve 28 V olmak üzere iki farklı giriş geriliminde
devrenin çıkışı ve PWM sinyali osiloskop aracılığıyla
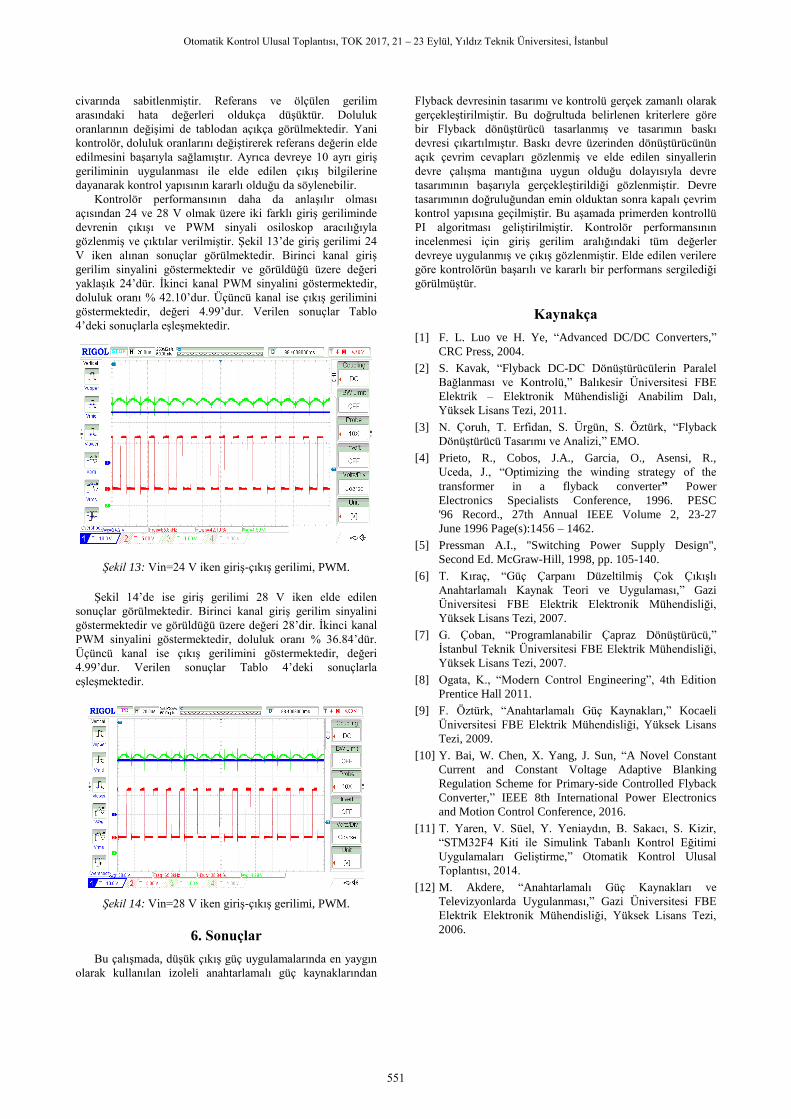
gözlenmiş ve çıktılar verilmiştir. Şekil 13’de giriş gerilimi 24
V iken alınan sonuçlar görülmektedir. Birinci kanal giriş
gerilim sinyalini göstermektedir ve görüldüğü üzere değeri
yaklaşık 24’dür. İkinci kanal PWM sinyalini göstermektedir,
doluluk oranı % 42.10’dur. Üçüncü kanal ise çıkış gerilimini
göstermektedir, değeri 4.99’dur. Verilen sonuçlar Tablo
4’deki sonuçlarla eşleşmektedir.
Şekil 13: Vin=24 V iken giriş-çıkış gerilimi, PWM.
Şekil 14’de ise giriş gerilimi 28 V iken elde edilen
sonuçlar görülmektedir. Birinci kanal giriş gerilim sinyalini
göstermektedir ve görüldüğü üzere değeri 28’dir. İkinci kanal
PWM sinyalini göstermektedir, doluluk oranı % 36.84’dür.
Üçüncü kanal ise çıkış gerilimini göstermektedir, değeri
4.99’dur. Verilen sonuçlar Tablo 4’deki sonuçlarla
eşleşmektedir.
Şekil 14: Vin=28 V iken giriş-çıkış gerilimi, PWM.
6. Sonuçlar
Bu çalışmada, düşük çıkış güç uygulamalarında en yaygın
olarak kullanılan izoleli anahtarlamalı güç kaynaklarından
Flyback devresinin tasarımı ve kontrolü gerçek zamanlı olarak
gerçekleştirilmiştir. Bu doğrultuda belirlenen kriterlere göre
bir Flyback dönüştürücü tasarlanmış ve tasarımın baskı
devresi çıkartılmıştır. Baskı devre üzerinden dönüştürücünün
açık çevrim cevapları gözlenmiş ve elde edilen sinyallerin
devre çalışma mantığına uygun olduğu dolayısıyla devre
tasarımının başarıyla gerçekleştirildiği gözlenmiştir. Devre
tasarımının doğruluğundan emin olduktan sonra kapalı çevrim
kontrol yapısına geçilmiştir. Bu aşamada primerden kontrollü
PI algoritması geliştirilmiştir. Kontrolör performansının
incelenmesi için giriş gerilim aralığındaki tüm değerler
devreye uygulanmış ve çıkış gözlenmiştir. Elde edilen verilere
göre kontrolörün başarılı ve kararlı bir performans sergilediği
görülmüştür.
Kaynakça
[1] F. L. Luo ve H. Ye, “Advanced DC/DC Converters,”
CRC Press, 2004.
[2] S. Kavak, “Flyback DC-DC Dönüştürücülerin Paralel
Bağlanması ve Kontrolü,” Balıkesir Üniversitesi FBE
Elektrik – Elektronik Mühendisliği Anabilim Dalı,
Yüksek Lisans Tezi, 2011.
[3] N. Çoruh, T. Erfidan, S. Ürgün, S. Öztürk, “Flyback
Dönüştürücü Tasarımı ve Analizi,” EMO.
[4] Prieto, R., Cobos, J.A., Garcia, O., Asensi, R.,
Uceda, J., “Optimizing the winding strategy of the
transformer in a flyback converter” Power
Electronics Specialists Conference, 1996. PESC
'96 Record., 27th Annual IEEE Volume 2, 23-27
June 1996 Page(s):1456 – 1462.
[5] Pressman A.I., "Switching Power Supply Design",
Second Ed. McGraw-Hill, 1998, pp. 105-140.
[6] T. Kıraç, “Güç Çarpanı Düzeltilmiş Çok Çıkışlı
Anahtarlamalı Kaynak Teori ve Uygulaması,” Gazi
Üniversitesi FBE Elektrik Elektronik Mühendisliği,
Yüksek Lisans Tezi, 2007.
[7] G. Çoban, “Programlanabilir Çapraz Dönüştürücü,”
İstanbul Teknik Üniversitesi FBE Elektrik Mühendisliği,
Yüksek Lisans Tezi, 2007.
[8] Ogata, K., “Modern Control Engineering”, 4th Edition
Prentice Hall 2011.
[9] F. Öztürk, “Anahtarlamalı Güç Kaynakları,” Kocaeli
Üniversitesi FBE Elektrik Mühendisliği, Yüksek Lisans
Tezi, 2009.
[10] Y. Bai, W. Chen, X. Yang, J. Sun, “A Novel Constant
Current and Constant Voltage Adaptive Blanking
Regulation Scheme for Primary-side Controlled Flyback
Converter,” IEEE 8th International Power Electronics
and Motion Control Conference, 2016.
[11] T. Yaren, V. Süel, Y. Yeniaydın, B. Sakacı, S. Kizir,
“STM32F4 Kiti ile Simulink Tabanlı Kontrol Eğitimi
Uygulamaları Geliştirme,” Otomatik Kontrol Ulusal
Toplantısı, 2014.
[12] M. Akdere, “Anahtarlamalı Güç Kaynakları ve
Televizyonlarda Uygulanması,” Gazi Üniversitesi FBE
Elektrik Elektronik Mühendisliği, Yüksek Lisans Tezi,
2006.
551
Otomatik Kontrol Ulusal Toplantısı, TOK 2017, 21 – 23 Eylül, Yıldız Teknik Üniversitesi, İstanbul