geometric reasoning about mechanical assembly randall h. wilson and jean-claude latombe andreas...
Post on 19-Dec-2015
218 views
TRANSCRIPT

Geometric Reasoning About Mechanical Assembly
Randall H. Wilson and Jean-Claude Latombe
Andreas Edlund <[email protected]>Romain Thibaux <[email protected]>

Assembly planning
● Assembly planning:– Initially:
● A bunch of loose pieces.
– Goal:● An assembled product.
● Uses:– Find assembly sequence.– Help contruct the building robots.– Analyze complexity of the product.

Virtual Manipulation Systems
● Hierachical approach.– First find just the sequence to assemble the product in
the first iteration.– Introduce actual assembly robot in later iterations.
● In this paper:– Free flying parts.

Assembly instruction
● m is a subset of parts of the assembly.● An assembly instruction:
– Changes m's position and orientation.– Maintains the relative positions of the parts in m.
● m is a subassembly.

Assembly algorithm
● The algorithm is represented as a partial ordering where the nodes are assembly instructions.
● The algorithm is correct if all instructions represent collision-free motions.

Blocking structure
● The goal assembly is considerably more constrained than initial state.
● Start from goal and search backwards.

Blocking graph
● Previous approach:– Generate-and-test.
● Generate-and-test is inefficient because the contact analysis is done many times for no reason.
● Better to do a complete contact analysis first and store it.– A blocking graph is a compact representation of the
results of this analysis.

Directional blocking graph
● Represents how the parts block each other in the assembly in every direction.
● A graph for each direction.

Directional blocking graph
● Various kinds of blocking graphs:– Infinitesimal translation.– Infinite translation.– Generalized motions (with rotations as well).

Terminology
● Locally free– Can translate infinitesimally in direction d without
collision.● Strongly connected component
– Maximal subassembly such that for every pair of parts, a path exists between them.

Non-directional blocking graph
● Separate the set of directions into regular regions.● One directional blocking graph per region.

Non-directional blocking graph
● Isolate every pair of parts that are in contact.

Non-directional blocking graph
● Find cone of allowed directions.

Non-directional blocking graph
● Each regular region represent a separate relationship between the part.
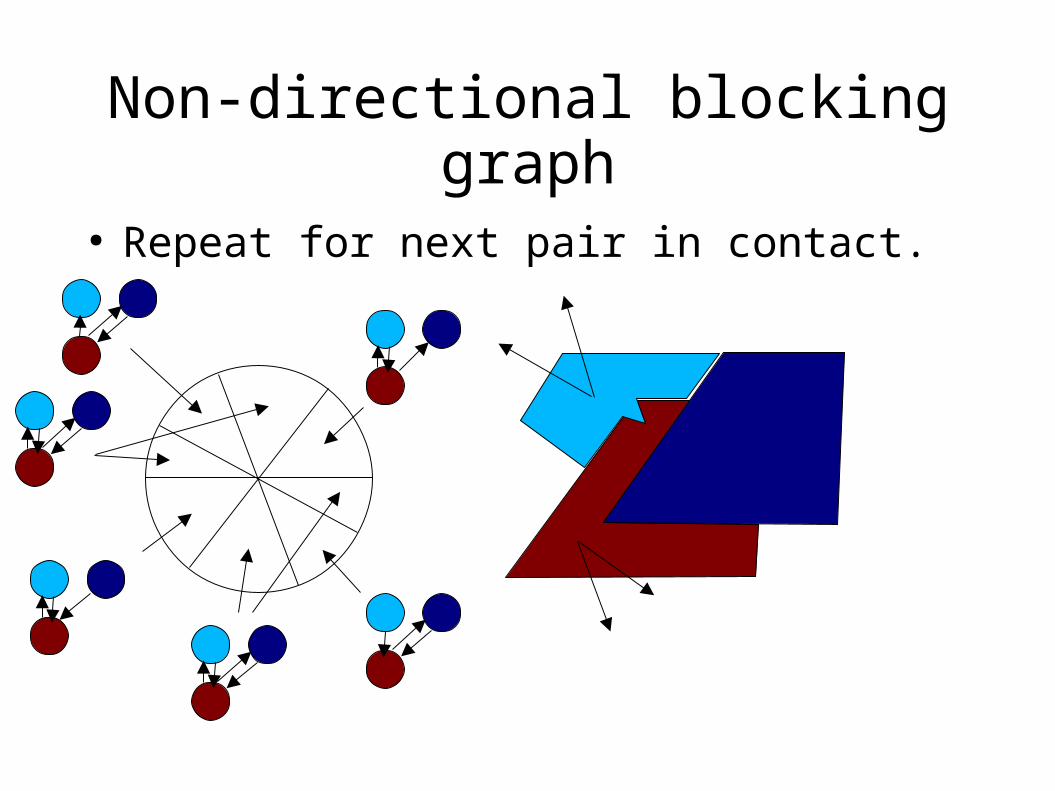
Non-directional blocking graph
● Repeat for next pair in contact.
Incremental updates
● Build the NDBG during the design of the product.● Modification of a part can be represented as a
deletion followed by an addition of a part.● Delete:
– Remove the corresponding node and all arcs connected to it.
● Add:– The a node and arcs to the other parts that are in contact.

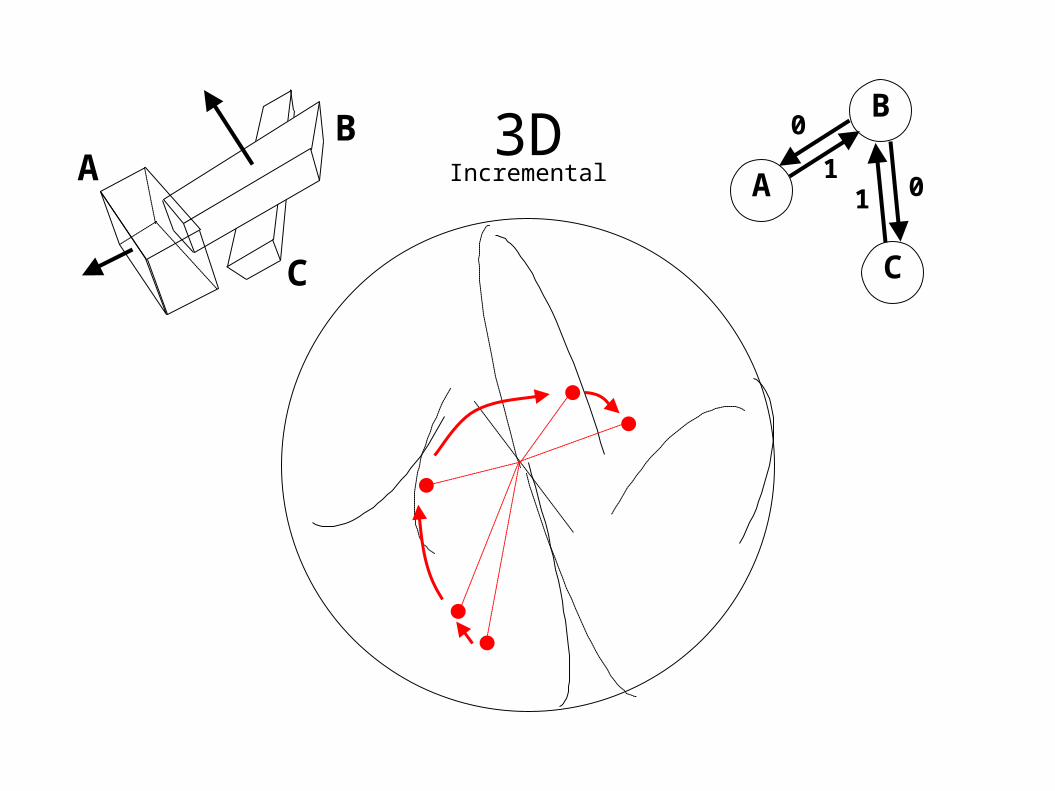
3D

3D
Face
Edge
Vertex
A
B
C
3DIncrementalA
B
C
1
100 01
0
1

3DIncrementalA
B
C AC
B
20 11 02

Infinite translations
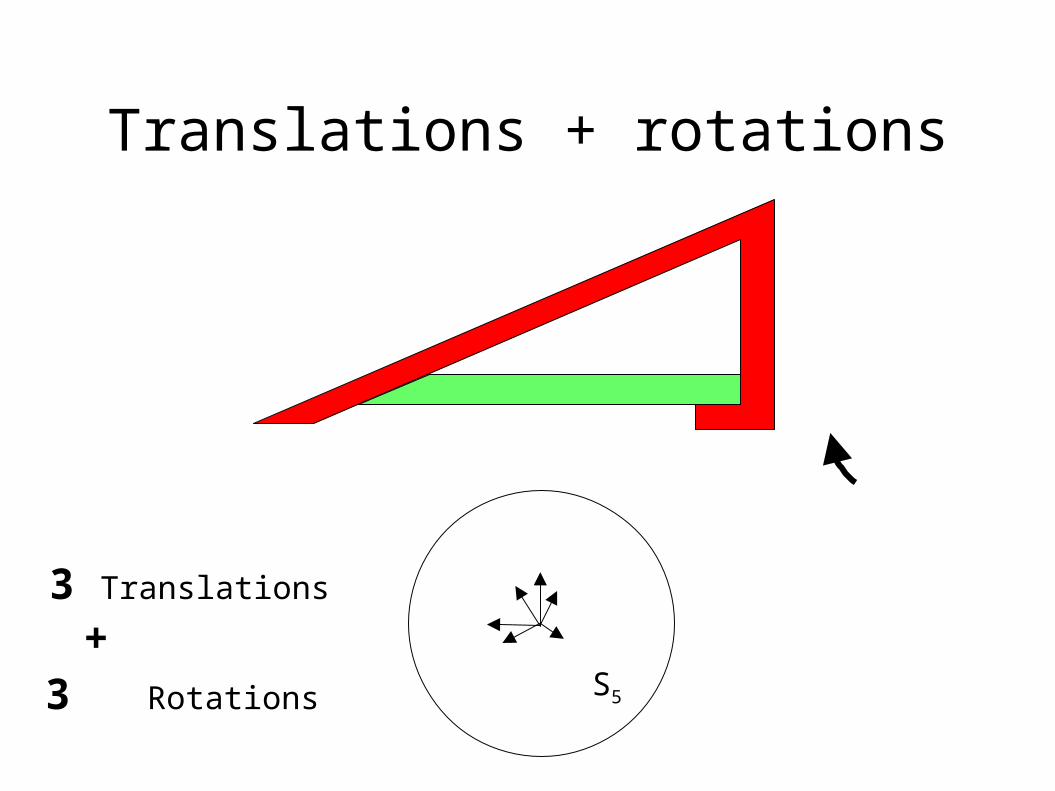
S5
3 Translations
+3 Rotations
Translations + rotations

Complexity measures
Complexity measures

Complexity measures

A
B
C
Blocking Graph
A
B
A
B
C
Assembly sequence
Complexity measures
NDBG
…and more !(next article)
Summary