ge arranque demo to res
TRANSCRIPT

7/25/2019 Ge Arranque Demo to Res
http://slidepdf.com/reader/full/ge-arranque-demo-to-res 1/64
Imagination at work
Arranque de Motores
Presentación GeneralOctubre 2015
www.ge.softstarterhub.com

7/25/2019 Ge Arranque Demo to Res
http://slidepdf.com/reader/full/ge-arranque-demo-to-res 2/64
2 /GE /October 5, 2015
Como arrancar un motor asíncrono?
Tensión PlenaArranque de motor de Anillos RosantesArranque a tensión reducida
> Estrella-Delta ( Estrella-Triángulo)> Auto-Transformador> Resistencia primaria> Arrancador suave

7/25/2019 Ge Arranque Demo to Res
http://slidepdf.com/reader/full/ge-arranque-demo-to-res 3/64
3 /GE /October 5, 2015
Tensión Plena
Arrancador NemaCon
Contactor & Rele de sobrecarga

7/25/2019 Ge Arranque Demo to Res
http://slidepdf.com/reader/full/ge-arranque-demo-to-res 4/64
4 /GE /October 5, 2015
t
Un
Voltage de arranque =100%Un
Tensión Plena
RPM
In
IStart
Corriente de arranque =500%-800%
Mstart
RPM
M operationM
n
Mmax
Load
Par de arranque =150%-180%Par Máximo = 220%
Shock Mecánico

7/25/2019 Ge Arranque Demo to Res
http://slidepdf.com/reader/full/ge-arranque-demo-to-res 5/64
5 /GE /October 5, 2015
Arranque de Motor de Anillos Rosantes
En algúnos casos cuando se tiene la necesidad de una grancorriente de arranque y no se puede usar un motorconvencional de jaula de ardilla, se utiliza un motor con rotordevanado y anillos rosantes.
El motor es arrancado por el cambio de resistencias en el rotory como la velocidad se incrementa las resistencias songradualmente removidas, hasta que la velocidad base delmotor es alcanzada. Para posteriormente trabaja como si fueraun motor jaula, de ardilla.
La ventaja del Motor de Rotor devanado es que la corriente dearranque puede ser baja y ajustar al par maximo posible.

7/25/2019 Ge Arranque Demo to Res
http://slidepdf.com/reader/full/ge-arranque-demo-to-res 6/64
6 /GE /
October 5, 2015
Motor de Anillos Rosantes
Anillos Rosantes

7/25/2019 Ge Arranque Demo to Res
http://slidepdf.com/reader/full/ge-arranque-demo-to-res 7/64
7 /GE /
October 5, 2015
Arranque a tensión reducida
Cuando se utiliza el arranque a tensión reducida:> El par de arranque es reducido proporcionalmente al
cuadrado de la reduccion de voltaje.
> La Corriente de arranque se reduce en proporción directa alvoltaje
La reducción de voltage depende del método de arranque
7/25/2019 Ge Arranque Demo to Res
http://slidepdf.com/reader/full/ge-arranque-demo-to-res 8/64
8 /GE /
October 5, 2015
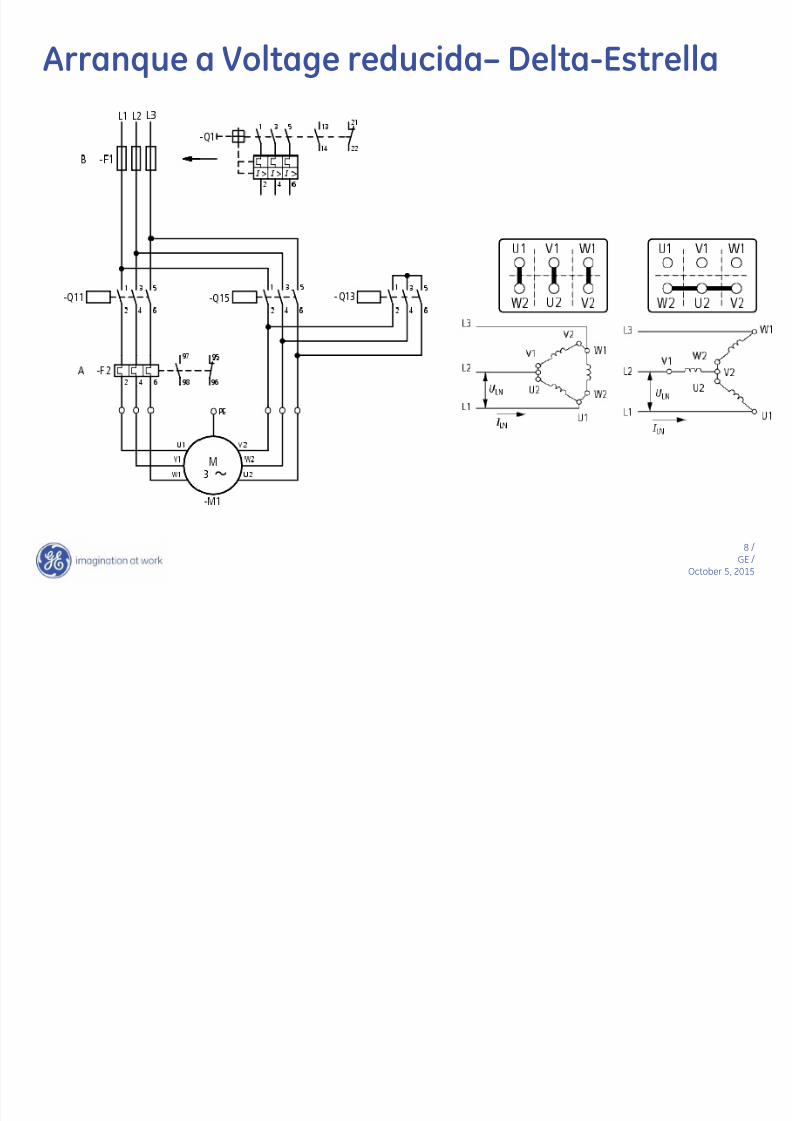
Arranque a Voltage reducida– Delta-Estrella

7/25/2019 Ge Arranque Demo to Res
http://slidepdf.com/reader/full/ge-arranque-demo-to-res 9/64
9 /GE /
October 5, 2015
Arranque a tensión reducida Estrella-Delta
Ventajas:
> Barato ( En potencias bajas)> Baja corriente de arranque, tipicamente 200%
Desventajas:> No tiene ajustes de arranque
> Posible alta conmutación de corriente y par> Control de lazo abierto> 6 cables a la alimentación del motor> Motor sin protección

7/25/2019 Ge Arranque Demo to Res
http://slidepdf.com/reader/full/ge-arranque-demo-to-res 10/64
10 /GE /
October 5, 2015
Arranque a tensión reducida– Autotransformador
% Full-Load Value
TransformerTap
Voltage &Current at
Motor
Supply LineCurrent
Motor OutputTorque
80% Tap 80% 64%* 64%
65% Tap 65% 42%* 42%
50% Tap 50% 25%* 25%

7/25/2019 Ge Arranque Demo to Res
http://slidepdf.com/reader/full/ge-arranque-demo-to-res 11/64
11 /GE /
October 5, 2015
Arranque a tension reducida Autotransformador
Ventajas:> Baja corriente de arranque
Desventajas:> Corriente magnetizante> Bromoso> Numero limitado de operaciones por hora> No tiene paro controlado> Complicado el cambio de parámetros de arranque
> Transientes por la conmutacion

7/25/2019 Ge Arranque Demo to Res
http://slidepdf.com/reader/full/ge-arranque-demo-to-res 12/64
12 /GE /
October 5, 2015
Arranque a Tension Reducida– ArrancadorSuave
3
L1
L2
L3
Vc
Vc
U start
Zero Crossing
t soft start
Phase Control

7/25/2019 Ge Arranque Demo to Res
http://slidepdf.com/reader/full/ge-arranque-demo-to-res 13/64
13 /GE /
October 5, 2015
Arranque a Tension Reducida – Arranque Suave
Algunas Ventajas:
> Por la tecnología de Estado Sólido baja en mantenimiento> Reduce corriente de arranque y golpe de ariete> Aceleración y desaceleración sin pasos> Arranque en lazo cerrado*
> Ajuste sencillo en todas las aplicaciones * > Caracteristicas Especiales: “ Control de Bombas”, ParoControlado, Velocidad Baja y reversa electronica, AjusteDual , Ahorro de Energía, Jog, etc. *
> Capacidad de Comunicación *
> Estadisticas de Operación *

7/25/2019 Ge Arranque Demo to Res
http://slidepdf.com/reader/full/ge-arranque-demo-to-res 14/64
14 /GE /
October 5, 2015
¿Son todos los arrancadores trifásicos similares?
Control de una faseEste equipo reduce el efecto del torque al arranque pero noreduce la corriente de arranque, debe usarse en conjuncióncon un arrancador de tensión plena
Control en dos fasesEste dispositivo elimina los transitorios del par y reduce lacorriente de arranque, la fase directa toma una mayorcorriente que las demás durante el arranque. No serecomienda para cargas severas
Control en tres fasesEste dispositivo controla las tres fases, proporcionando unoptimo control de arranque suave, puede usarse en cargasseveras

7/25/2019 Ge Arranque Demo to Res
http://slidepdf.com/reader/full/ge-arranque-demo-to-res 15/64
Categoría Empleo AC53b Operación Bypass(según IEC 60947-4-2)
• Valor de intensidad: Intensidad nominal “máxima” del motor a arrancar,dados los parámetros de funcionamiento especificados por el resto dedatos.
• Intensidad arranque: múltiplo de la intensidad nominal del motor que se
alcanzará durante el arranque.• Tiempo de arranque: el tiempo que tarda el motor en acelerar.
• Tiempo no conducción: no paso de corriente entre arranques.
15
Valor de intensidad (A)
Intensidad de arranque (A)
Tiempo de arranque (segundos)
Tiempo no conducción (segundos)

7/25/2019 Ge Arranque Demo to Res
http://slidepdf.com/reader/full/ge-arranque-demo-to-res 16/64
Categoría Empleo AC53a Operación Continua(según IEC 60947-4-2)
• Valor de intensidad: Intensidad nominal “máxima” del motor a arrancar, dados losparámetros de funcionamiento especificados por el resto de datos.
• Intensidad arranque: múltiplo de la intensidad nominal del motor que se alcanzarádurante el arranque.
• Tiempo de arranque: el tiempo que tarda el motor en acelerar.
• Ciclo de trabajo en carga: porcentaje de cada ciclo operativo durante el cualestará actuando el arrancador estático.
• Arranques por hora: número de ciclos de funcionamiento por hora.
16
Intensidad de arranque (A)
Tiempo de arranque (s)
Ciclo de trabajo con carga
Arranques por hora
Valor de intensidad (A)

7/25/2019 Ge Arranque Demo to Res
http://slidepdf.com/reader/full/ge-arranque-demo-to-res 17/64
Bypass Externo Bypass Interno
17

7/25/2019 Ge Arranque Demo to Res
http://slidepdf.com/reader/full/ge-arranque-demo-to-res 18/64
Bypass integrado “Built-in”
• Al instalar Arrancadores Estáticos en el interior de un cuadro eléctricodebe tenerse en cuenta la disipación de calor generada durante lamarcha del motor. Esto puede requerir el uso de ventiladores derefrigeración o contactores de bypass – pero no con los arrancadoresestáticos ASTAT XL.
• EL Bypass integrado del ASTAT XL disipa muy poco calor durante elfuncionamiento y elimina el coste de ventiladores externos o la instalaciónde un contactor de Bypass.
18

7/25/2019 Ge Arranque Demo to Res
http://slidepdf.com/reader/full/ge-arranque-demo-to-res 19/64
Protección
• 12 protecciones configurables individualmente y temporizadas, con
almacenamiento de los 8 últimos disparos
• Respuesta seleccionable – Disparo, Advertencia & Registro, solo Registro.
•
Registro detallado de estado y de disparo.
19

7/25/2019 Ge Arranque Demo to Res
http://slidepdf.com/reader/full/ge-arranque-demo-to-res 20/64
Protecciones de Sobrecarga
• Modelo térmico con dos componentes, bobinado del motor y chasis del
motor - sin necesidad de costosos relés de alta gama para la proteccióndel motor.
• Permite utilizar el motor en todo su potencial, sin temor a problemas desobrecarga.
•
Protección térmica hasta Clase 20
20

7/25/2019 Ge Arranque Demo to Res
http://slidepdf.com/reader/full/ge-arranque-demo-to-res 21/64
Modelo térmico
A tener en cuenta:
• Chasis del motor (alta capacidad térmica, afecta el comportamientotérmico a largo plazo)
• Bobinados del motor (baja capacidad térmica, afecta el comportamientotérmico a corto plazo)
• Corriente del motor
• Pérdidas (hierro y resistencia del devanado)
• Refrigeración (durante el funcionamiento y en paro)
21

7/25/2019 Ge Arranque Demo to Res
http://slidepdf.com/reader/full/ge-arranque-demo-to-res 22/64
Método de arranque
22
Tipo de Arranque Parámetrocontrolado
Efecto en el rendimiento de la aplicación
Rampa de tensión por tiempo Tensión Intensidad de arranque, par de arranque, aceleración
Intensidad constante Intensidad Par de arranque, aceleración
Control de par Par Intensidad de arranque, aceleración
Control adaptativo Aceleración Intensidad de arranque, par de arranque
• Los arrancadores estáticos ofrecen una gran variedad de métodos para
el control del arranque y el paro. Cada tipo de control utiliza unparámetro de control primario diferente.

7/25/2019 Ge Arranque Demo to Res
http://slidepdf.com/reader/full/ge-arranque-demo-to-res 23/64
Control adaptativo
• El control adaptativo permite la selección de diferentes perfiles de
aceleración y deceleración acordes con las necesidades de la aplicación.
23
velocidad
tiempo
Puntos:
Aceleración tempranaAceleración constanteAceleración tardía
Deceleración tempranaDeceleración constanteDeceleración tardía

7/25/2019 Ge Arranque Demo to Res
http://slidepdf.com/reader/full/ge-arranque-demo-to-res 24/64
Control adaptativo
Dos algoritmos
El control adaptativo está basado en
dos algoritmos, uno para medir las
características del motor y otro para
controlarlo.
Primer arranque
Durante el primer arranque, el
algoritmo mide las características del
motor a velocidad 0 y a velocidad
máxima .
24
Perfiles de arranque y de parada
El algoritmo de control define los
perfiles de arrancada y de parada
relacionados con la velocidad del
motor y el tiempo transcurrido.
Hasta 6 perfiles
ASTAT XL permite el control de tres
perfiles de aceleración y tres perfiles
de deceleración.

7/25/2019 Ge Arranque Demo to Res
http://slidepdf.com/reader/full/ge-arranque-demo-to-res 25/64
Control adaptativo
Comparación
Durante cada arranque y parada, el
control adaptativo compara la
velocidad estimada del motor con el
perfil seleccionado.
Ajuste
El arrancador estático ajusta la potencia
del motor para lograr el perfil
seleccionado (más potencia si la
velocidad estimada es demasiado baja, ymenos potencia si es demasiado
elevada).
25
Perfeccionando el modelo
El algoritmo perfecciona el modelocon los datos de cada arrancada y
cada parada.
Ajuste fino
El usuario puede ajustar conprecisión la ganancia del control
adaptativo para un rendimiento más
suave.

7/25/2019 Ge Arranque Demo to Res
http://slidepdf.com/reader/full/ge-arranque-demo-to-res 26/64
Método de arranque: Rampa de tensión(ASTAT XB )• La aplicación mas sencilla para control en 2 fases• La rampa de tensión del ASTAT aumenta desde la tensión inicial (1) a la
tensión total (3) durante el período de tiempo ajustado (2).
• La rampa de tensión de inicio (1) es la forma más sencilla de influir en laintensidad y el par.
26
Tensión inicialTiempo rampa de arranqueTensión máxima
1
2
3 T
e n s i ó n
Tiempo

7/25/2019 Ge Arranque Demo to Res
http://slidepdf.com/reader/full/ge-arranque-demo-to-res 27/64
Métodos de arranque: Corriente constante
• La intensidad constante es la forma tradicional de arranque, se incrementala intensidad desde 0 a el nivel ajustado y se mantiene la intensidad establea ese nivel hasta que el motor se acelera.
• La intensidad constante inicial es ideal para aplicaciones en las que la
corriente de arranque debe mantenerse por debajo de un nivel determinado.
27
Intensidad inicial (parámetro 2C)
Límite de corriente (parámetro 2B)Intensidad máxima
1
23

7/25/2019 Ge Arranque Demo to Res
http://slidepdf.com/reader/full/ge-arranque-demo-to-res 28/64
Métodos de arranque: Rampa de Corriente
• La rampa de corriente del ASTAT incrementa la corriente desde un valorinicial (1) hasta un límite máximo (3), durante el período de tiempoajustado (2).
• La rampa de corriente inicial puede ser utilizado en aplicaciones donde:
– La carga es diferente en cada arranque
– La carga varia con facilidad, pero el tiempo de arranque debe ser constante
– Suministro eléctrico limitado
28
4
Intensidad inicial (parámetro 2C)Tiempo rampa de arranque (par. 2D)Límite de corriente (parámetro 2B)Intensidad máxima
1
2
3

7/25/2019 Ge Arranque Demo to Res
http://slidepdf.com/reader/full/ge-arranque-demo-to-res 29/64
Métodos de arranque: Pulso Arranque Kickstart
• Kickstart proporciona un breve impulso adicional al comienzo de la
arrancada y puede ser utilizado conjuntamente con la rampa de corrienteo el arranque mediante corriente constante.
• Kickstart puede ser útil para ayudar a las cargas que requieren elevadopar inicial de arranque y que luego aceleran fácilmente (por ejemplo,cargas como prensas).
Nivel Kickstart (parámetro 2E)Tiempo Kickstart (parámetro 2F)Intensidad inicial (parámetro 2C)Tiempo rampa de arranque (parámetro 2D)
Límite de corriente (parámetro 2B)Intensidad nominal máxima
4
1
2
3
56

7/25/2019 Ge Arranque Demo to Res
http://slidepdf.com/reader/full/ge-arranque-demo-to-res 30/64
Métodos de Arranque: Control Adaptativo
• En el Control Adaptativo de arranque suave, el arrancador ASTAT XL ajusta
la corriente con el fin de arrancar el motor en un tiempo determinado ycon un perfil de aceleración seleccionado.
velocidad
tiempo
Aceleración temprana
Aceleración constanteAceleración tardía

7/25/2019 Ge Arranque Demo to Res
http://slidepdf.com/reader/full/ge-arranque-demo-to-res 31/64
Métodos de Arranque: Control Adaptativo
Ejemplos:
• Aceleracióntardía
• Aceleración
temprana
• Aceleración /deceleraciónconstante
31
Aceleracióntardía
En transportadoresde banda sin
correas detransmisión, odonde seencuentren filtros oacoplamientos deunión, o grandesventiladores con
correas detransmisión.
Aceleracióntemprana
En bombassumergibles donde
se necesitealcanzar lavelocidad mínimacon rapidez.
Aceleración /deceleraciónconstante
Donde se requiera
una respuestalineal sinnecesidad derealimentaciónmediante dinamotacométrica o
encoder.

7/25/2019 Ge Arranque Demo to Res
http://slidepdf.com/reader/full/ge-arranque-demo-to-res 32/64
Selección del Método de Arranque
32
Control Método
Intensidad de arranque del motor Corriente constante/Rampa de corriente
Motor/aceleración en carga Control Adaptativo
• Seleccionar el tipo de arrancador estático que directamente controle los
parámetros de interés.

7/25/2019 Ge Arranque Demo to Res
http://slidepdf.com/reader/full/ge-arranque-demo-to-res 33/64
Método de Paro
33
Método de Paro Efecto en el rendimiento de la aplicación
Inercia Disminución natural de la velocidad dependiente de la carga
Rampa de tensión Tiempo extendido de la marcha
Control AdaptativoTiempo extendido de la marcha de acuerdo con el perfil de desaceleraciónseleccionado
Freno Tiempo reducido de la marcha
• Los arrancadores estáticos se utilizan a menudo en aplicaciones de
bombeo para eliminar los efectos perjudiciales del golpe de ariete. ElControl Adaptativo es el método de paro más adecuado para este tipode aplicaciones.

7/25/2019 Ge Arranque Demo to Res
http://slidepdf.com/reader/full/ge-arranque-demo-to-res 34/64
Método de Paro: Parada TVR
•El tiempo de rampa de tensión reduce gradualmente la tensión a motordurante el tiempo ajustado. La carga puede continuar funcionandodespués de que la rampa de parada se haya completado.
• La rampa de parada de tensión puede ser utilizada para aplicacionesdonde el tiempo de parada necesita ser aumentado, o para evitar
transitorios en los suministros de grupos electrógenos.
34
Tiempo de parada1

7/25/2019 Ge Arranque Demo to Res
http://slidepdf.com/reader/full/ge-arranque-demo-to-res 35/64
Método de Paro: Control Adaptativo
• En el Control Adaptativo de paro suave, el ASTAT XL controla la corriente
con el fin de detener el motor en un tiempo determinado y con un perfil dedesaceleración seleccionado.
• El Control Adaptativo puede ser útil en la ampliación del tiempo de paradacon cargas de baja inercia.
velocidad
tiempo
Deceleración tardía
Deceleración constanteDeceleración temprana

7/25/2019 Ge Arranque Demo to Res
http://slidepdf.com/reader/full/ge-arranque-demo-to-res 36/64
Por qué Control Adaptativo?
• La aceleración gradual “libre” puede beneficiar a todas las aplicaciones de
motor, pero muchas situaciones necesitan un control más preciso sobre laaceleración y / o desaceleración.
Transportadores Ventiladores Bombas

7/25/2019 Ge Arranque Demo to Res
http://slidepdf.com/reader/full/ge-arranque-demo-to-res 37/64
Control Adaptativo para Bombas
• El Control Adaptativo es ideal para el paro de bombas. Permite hacer
coincidir el perfil de deceleración con las características hidráulicas delsistema que son únicas e individuales.
Llenado de deposito Largas conducciones, Sistema abierto
flujo elevadoDeceleración tardía Deceleración constante Deceleración temprana

7/25/2019 Ge Arranque Demo to Res
http://slidepdf.com/reader/full/ge-arranque-demo-to-res 38/64
Bombeo: Llenado de depósitos
Características de la aplicación
• Contrapresión elevada – un pequeñocambio en la velocidad puede hacerque el flujo rápidamente cambie desentido de directo a inverso.
Problema
• El cambio rápido en la dirección haceque el flujo se invierta.
• El cierre de golpe de las válvulas,
provoca ondas de choque.
38

7/25/2019 Ge Arranque Demo to Res
http://slidepdf.com/reader/full/ge-arranque-demo-to-res 39/64
Bombeo: Llenado de depósitos
Ventajas del ASTAT XL:
• Deceleración tardía- Un controlmuy lento de la deceleración delmotor en la transición de flujo / noflujo seguido por una rápida
deceleración.
39

7/25/2019 Ge Arranque Demo to Res
http://slidepdf.com/reader/full/ge-arranque-demo-to-res 40/64
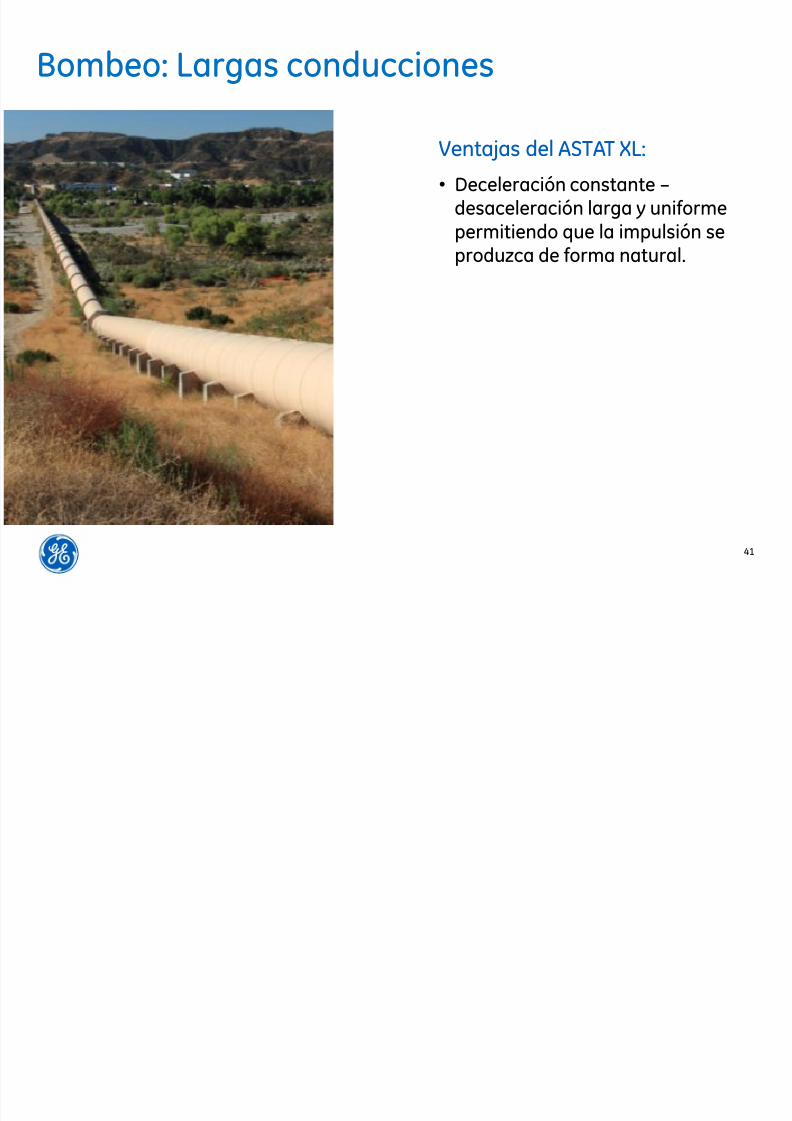
Bombeo: Largas conducciones
Características de la aplicación
• Largas conducciones, flujo elevado
Problema
• Se crea una baja presión detrás de labomba cuando esta se detiene.
• El cierre de la válvula de retención y
las ondas de choque se producenhasta que se estabiliza la presión(golpe de ariete).
40
7/25/2019 Ge Arranque Demo to Res
http://slidepdf.com/reader/full/ge-arranque-demo-to-res 41/64
Bombeo: Largas conducciones
Ventajas del ASTAT XL:
• Deceleración constante – desaceleración larga y uniformepermitiendo que la impulsión seproduzca de forma natural.
41

7/25/2019 Ge Arranque Demo to Res
http://slidepdf.com/reader/full/ge-arranque-demo-to-res 42/64

7/25/2019 Ge Arranque Demo to Res
http://slidepdf.com/reader/full/ge-arranque-demo-to-res 43/64
Bombeo: Sistema abierto
Ventajas del ASTAT XL:
• Deceleración temprana – Deceleración rápida para que elagua deje de bombear lo antesposible, aunque la bomba continua
girando mientras se vacíe el aguade la tubería.
43

7/25/2019 Ge Arranque Demo to Res
http://slidepdf.com/reader/full/ge-arranque-demo-to-res 44/64
Control Adaptativo – Sumario
• Control de aceleración / deceleración - en gran parte no afectados porlas variaciones en la carga.
• Elecciones de los perfiles de arranque y de paro– el rendimiento sepuede adaptar a los requisitos de la carga.
• Ideal para la paro de la bomba – reconoce que no existe un perfil únicode desaceleración ideal para todas las situaciones.

7/25/2019 Ge Arranque Demo to Res
http://slidepdf.com/reader/full/ge-arranque-demo-to-res 45/64
ASTAT XL XLArrancador Estático
Ventajas / Aplicación

7/25/2019 Ge Arranque Demo to Res
http://slidepdf.com/reader/full/ge-arranque-demo-to-res 46/64
Modo Funcionamiento de Emergencia
• En algunos casos, el equipo debe funcionar a toda costa (por ejemplo,
sistemas de ventilación o bombeo en caso de incendio) sin tener encuenta el posible prejuicio del motor durante el arranque.
• El funcionamiento de Emergencia realiza el arranque desactivando todaslas protecciones, lo que permite que el motor funcione el mayor tiempoposible.
46

7/25/2019 Ge Arranque Demo to Res
http://slidepdf.com/reader/full/ge-arranque-demo-to-res 47/64
Parámetros dual, segundo motor
• Soporta dos juegos de datos delmotor, perfiles de aceleración /deceleración.
– Bombas de reserva
– Diferentes modos de arranque para
diferentes condiciones de carga– Freno
47

7/25/2019 Ge Arranque Demo to Res
http://slidepdf.com/reader/full/ge-arranque-demo-to-res 48/64
PowerThrough
• El arrancador puede operar en el control de dos fases si un SCR está
dañado. Esto permite un funcionamiento continuo mientras se repara.
48

7/25/2019 Ge Arranque Demo to Res
http://slidepdf.com/reader/full/ge-arranque-demo-to-res 49/64
Auto-Reset
• Selección de Auto-Reset , bajo unacondición de disparo.
• Permite un funcionamiento seguroininterrumpido de instalaciones sinoperarios.
• Selecciona entre 3 grupos decondiciones de Reset, Resetretardado y nº máximo de Reset.
49

7/25/2019 Ge Arranque Demo to Res
http://slidepdf.com/reader/full/ge-arranque-demo-to-res 50/64
Frenado DC
• Para cargas con inercias elevadas
• Aumentar la productividad de lasmáquinas tales como sierras de cinta ytrituradoras, reduciendo el tiemponecesario para reemplazar las bandasde sierra o cabezales de corte….
• Inyección de CC para ralentizar deforma efectiva el motor, control en lastres fases distribuyéndoseuniformemente el calor en el motor.
50

7/25/2019 Ge Arranque Demo to Res
http://slidepdf.com/reader/full/ge-arranque-demo-to-res 51/64
Jog
• Velocidad lenta de giro (aproximadamente 11%)
• El par máximo alrededor del 60% de la FLT del motor en directa y 45% FLTen inversa
• Ideal para máquinas que requieren alineamiento tales como mezcladoreso contenedores, descarga de la tolva … y para funciones de
mantenimiento
51
Jog DirectaJog InversaOperación normal
1
2
3

7/25/2019 Ge Arranque Demo to Res
http://slidepdf.com/reader/full/ge-arranque-demo-to-res 52/64
Salida 24 VCC
• Dispone de una fuente de alimentación auxiliar de 24Vcc, eliminando el
coste de una alimentación separada.
52

7/25/2019 Ge Arranque Demo to Res
http://slidepdf.com/reader/full/ge-arranque-demo-to-res 53/64
Visión general
Rango• ASTAT XB –
sin protección térmica de motor
• ASTAT XBm – con protección térmica de motor
– 11 Modelos• 18 ~ 200 A
• 7.5 ~ 110 kW / 10 ~ 150 CV
– Amplio rango de tensión
• 200 ~ 575 VAC
– Homologaciones
53
7/25/2019 Ge Arranque Demo to Res
http://slidepdf.com/reader/full/ge-arranque-demo-to-res 54/64
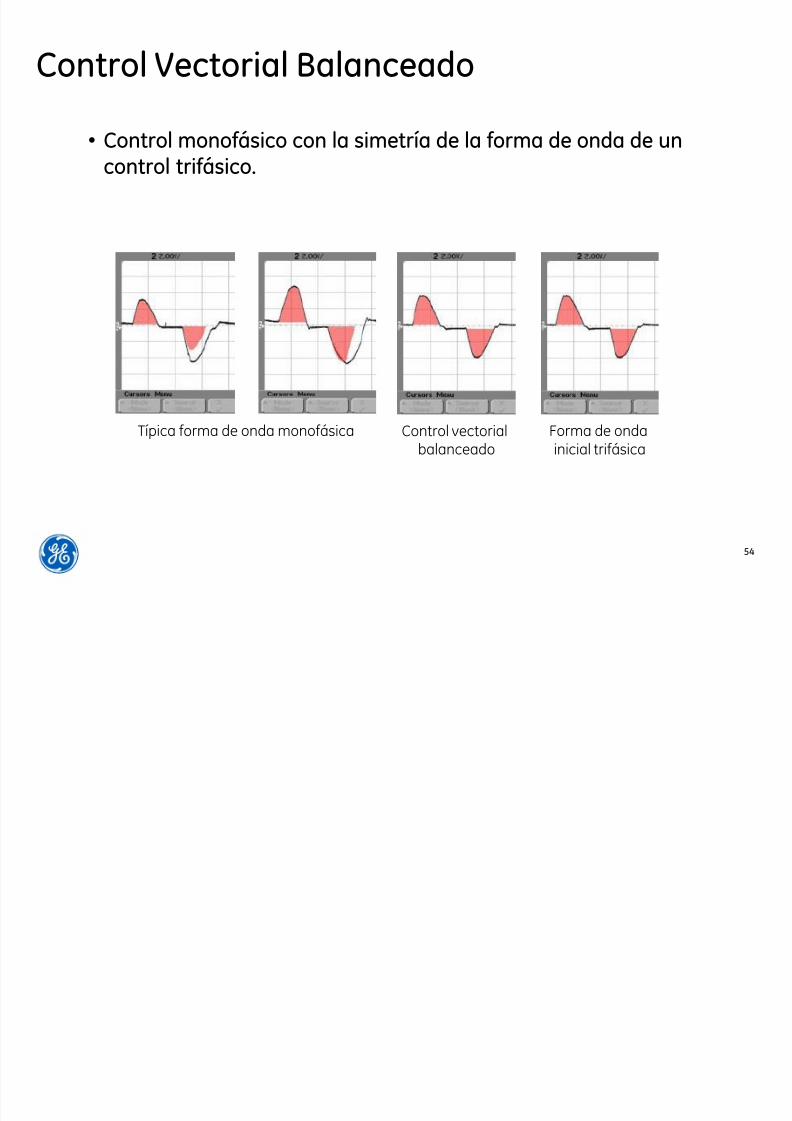
Control Vectorial Balanceado
•
Control monofásico con la simetría de la forma de onda de uncontrol trifásico.
54
Control vectorialbalanceado
Forma de ondainicial trifásica
Típica forma de onda monofásica

7/25/2019 Ge Arranque Demo to Res
http://slidepdf.com/reader/full/ge-arranque-demo-to-res 55/64
Control Vectorial Balanceado
•
Un algoritmo de control superior que minimiza el desequilibrio entre lasfases controladas y no controladas.
• El Control Vectorial Balanceado da:
– Mayor uniformidad en el par de aceleración del motor
– Corrientes de fase equilibradas de manera más uniforme
– Menor ruido y vibraciones
55

7/25/2019 Ge Arranque Demo to Res
http://slidepdf.com/reader/full/ge-arranque-demo-to-res 56/64
Astat XL…………Visión General• Rango
– 23 ~ 1600 A
– 11 ~ 800 kW, 15 ~ 1100 CV
• 2 rangos de tensión
– 200 ~ 525 VAC
– 380 ~ 690 VAC
• Protecciones
– IP20 QLxxB0023D ~ QLxxB0105D
– IP00 QLxxB0145D ~ QLxxX1600D
• Homologaciones
56

7/25/2019 Ge Arranque Demo to Res
http://slidepdf.com/reader/full/ge-arranque-demo-to-res 57/64
Barra conductora adaptable
• El cableado de los arrancadores degran potencia puede ser costoso yrequerir un espacio significativo enel cuadro eléctrico.
• ASTAT XL 360 A reduce el coste decableado y el espacio en el cuadroeléctrico ya que permite la conexiónsuperior e inferior de las entradas yde las salidas.
57

7/25/2019 Ge Arranque Demo to Res
http://slidepdf.com/reader/full/ge-arranque-demo-to-res 58/64
Interfaz intuitiva
• Teclado fácil de usar (display gráfico &
registro de eventos)
• LCD gráfico con amplia pantalla demonitorización
• Texto en 4 líneas – Reporte de mensajes
•
Gráficos en tiempo real de la operación delmotor
• Menús – Estándar, Extendido & Configuraciónrápida
• 99 registros de eventos y memoria de los
últimos 8 disparos
58

7/25/2019 Ge Arranque Demo to Res
http://slidepdf.com/reader/full/ge-arranque-demo-to-res 59/64
Interfaz fácil de usar
• Interfaz con 8 idiomas seleccionables, función Configuración rápida yMenú Estándar intuitivo -ASTAT XL increíblemente sencillo de utilizar.
• El Menú Extendido ofrece funciones especializadas, fácil de configurar. El
ASTAT XL pasa de ser un simple arrancador a un sistema de gestión delmotor de gran alcance.
59

7/25/2019 Ge Arranque Demo to Res
http://slidepdf.com/reader/full/ge-arranque-demo-to-res 60/64
Una interfaz que piensa como usted
60
Estado de los LEDs
Pantallas de medición
Diagnóstico de disparo
Registro de disparos
Registro de eventos
Botones locales decontrol
Botones de
navegación
Teclas de accesodirecto Registros defuncionamiento &herramientas de puestaen marcha
Texto completoDisplay
7/25/2019 Ge Arranque Demo to Res
http://slidepdf.com/reader/full/ge-arranque-demo-to-res 61/64
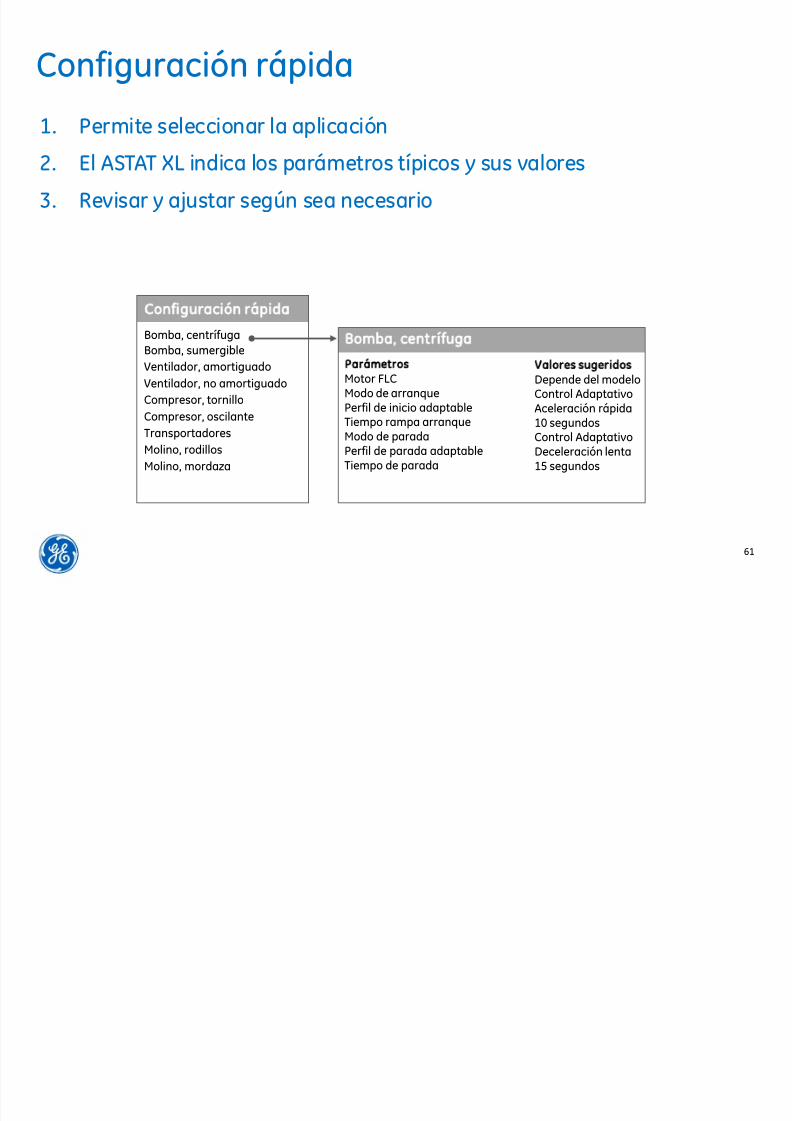
Configuración rápida
1. Permite seleccionar la aplicación
2. El ASTAT XL indica los parámetros típicos y sus valores
3. Revisar y ajustar según sea necesario
61
Configuración rápida
Bomba, centrífuga
Bomba, sumergible
Ventilador, amortiguado
Ventilador, no amortiguado
Compresor, tornillo
Compresor, oscilante
Transportadores
Molino, rodillos
Molino, mordaza
Bomba centrífuga
Parámetros
Motor FLCModo de arranquePerfil de inicio adaptable
Tiempo rampa arranqueModo de paradaPerfil de parada adaptableTiempo de parada
Valores sugeridos
Depende del modeloControl AdaptativoAceleración rápida
10 segundosControl AdaptativoDeceleración lenta15 segundos

7/25/2019 Ge Arranque Demo to Res
http://slidepdf.com/reader/full/ge-arranque-demo-to-res 62/64
Pantalla de Monitorización
• El Panel ofrece una amplia gama de información sobre el funcionamiento
del ASTAT XL.
• La mitad superior de la pantalla muestra información en tiempo real delestado del arrancador, temperatura del motor y potencia del motor.
62

7/25/2019 Ge Arranque Demo to Res
http://slidepdf.com/reader/full/ge-arranque-demo-to-res 63/64
• ASTAT XL ofrece una amplia monitorización de información para la mejora
del proceso y el mantenimiento. El reporte está disponible en el display ovía serie y mediante la salida analógica y las salidas por relés.
• Programable
63
Pantalla de Monitorización

7/25/2019 Ge Arranque Demo to Res
http://slidepdf.com/reader/full/ge-arranque-demo-to-res 64/64