future research directions in military ground vehicle mobility
TRANSCRIPT

U.S. ARMY TANK AUTOMOTIVE RESEARCH, DEVELOPMENT AND ENGINEERING CENTER
Future Research Directions in Military Ground Vehicle Mobility
ISTVSSeptember 2016
Dr. David Gorsich, ST/Ground Systems,Chief Scientist, TARDEC

Unclassified, Distribution A
TARDEC – Then and Now
2
Early Mobility Studies
Major Thrust Areas Today
Medium Combat
Heavy Comba
t
Tactical
Power Dense, Common, Modular Engine
Propulsion Protected Mobility Vehicle Architecture Autonomy

• Ground Systems Power and Energy Laboratory (GSPEL)• Vehicle Full Load Cooling Test Chamber • Crew Station/Turret Motion Base Simulator (CS/TMBS) • Ride Motion Simulator• System-level Analysis Capability• Center for Ground Vehicle
Development and Integration (CGVDI) • Vehicle Inertial Properties Evaluation
Rig (VIPER) • Mission Equipment Vibration Table (MEVT) • Suspension Parameter Identification Device and
Evaluation Rig (SPIDER) • Tire, Run-Flat, and Roadwheel Simulation Laboratory
(TR2SL)• Elastomer Improvement Laboratory• Fuels & Lubricants Laboratory
• Fresh Water Test Facility • Bridge Dynamic Structural Load Simulation Laboratory• Anthropomorphic Test Drive (ATD) Certification
Laboratory• Crew Compartment Underbody Blast Simulator• Foot Impact Test Fixtures• Head Impact Laboratory (HIL)• Sub-System Drop Tower (SSDT)
• TARDEC Fuels and Lubricants Research Facility (TFLRF) (GOCO with SWRI)
• Quality Surveillance Laboratory (Army Petroleum Laboratory; APL)
Unique Facilities
Laboratory Capabilities
TARDEC’s operations have a resource value of over $1.1Band occupy 936,000 square feet of laboratory space on the Detroit Arsenal.
TARDEC Fuels and Lubricants Research Facility @ Southwest Research Institute
Turret Motion Base Simulator
Ride Motion SimulatorPower and Energy
Vehicle Environment Lab
Southwest Research Institute (SWRI) (TX) (GOCO = Government Owned-Contractor Operated )Selfridge (MI)
Warren (MI)
3
Susquehanna (PA)
Unclassified, Distribution A

AMRDECAviation and
Missile Research Development and
Engineering Center
ARDECArmament Research,
Development and Engineering Center
ARLArmy Research
Laboratory
CERDECCommunications-
Electronics Research,
Development and Engineering Center
ECBCEdgewood Chemical
Biological Center
NSRDECNatick Soldier
Research, Development and
Engineering Center
TARDECTank Automotive
Research, Development and
Engineering Center
TARDEC Organizational Structure
4Unclassified, Distribution A
Army
Materiel
Command
(AMC)
Assistant Secretary
of the Army for
Acquisition,
Logistics, and
Technology
(ASA-ALT)
Research, Development and Engineering Command
(RDECOM)

Military Challenges are Unique
5Unclassified, Distribution A

Designing a Ground Vehicle
• Start with Requirements
– Mobility (Speed)
– Payload (# crew, cargo weight)
– Protection level
– Lethality
– Deployabilty
• Deployment Method
• Truck, Boat, Rail, Air
• Fixes Maximum Weight and Size
• Deployability limits the
tradespace for the other
requirements
6Unclassified, Distribution A

Iron Triangle - Example of Trades
Performance
(Mobility)
Protection Payload
Performance
(Mobility)
Protection Payload
HMMWV MRAP
7
Strive to optimize 3 Ps
• Protection
• Payload
• Performance (Mobility)
Unclassified, Distribution A

NATO Reference Mobility Model (NRMM)
200019801950 19701960 1990
1954: Land Locomotion Lab
established; led by Dr. Bekker
Walking Machine
2010
1971: AMC-71 Mobility Model
1974: AMC-74 Mobility Model
1978: NATO Reference Mobility
Model2014: ET148,
NG-NRMM
1992: NRMM II
Autonomous Systems
Land Locomotion
8
2016: RTG248 NG-NRMM
2019: NG-NRMM STANREC
2020
Multibody Dynamics
Physical Simulators
Unclassified, Distribution A

Next-Generation NRMM
• Shortcomings of NRMM
– Based on empirical observations so extrapolation is difficult
– Specific to wheeled/tracked; No intelligence
– Cannot assess contemporary vehicle design technologies
– Steady-state and 2D analyses
– Poor inter-operability with other terramechanics models
– Difficult to integrate with modern vehicle dynamic simulations
• Next-Generation NRMM
– NATO Team formed in 2014
– 55 members from 15 nations participating
– Goal: Investigate an efficient next-generation, physics-based simulation tool to more accurately predict mobility based on accurate depictions of vehicle, terrain, and their interactions
9Unclassified, Distribution A

Possible path forward – Next-Gen NRMM
Develop scalable, physics-based modeling, simulation, and
visualization capability for mobility in deformable terrain using
discrete element methods and massively parallel architectures.
10
Fording
simulation
Discrete terrain
simulation
HPC
Unclassified, Distribution A

Path Forward
NATO Research Task Group 248 will carry forward six research thrusts:
1. GIS-Terrain and Mobility Mapping: Identify a GIS-based mapping tool that
implements and integrates existing valid mobility metrics (%NOGO and
Speed Made Good) in an open architected environment.
2. Simple Terramechanics:Identify most promising existing terramechanics
methods supporting NG-NRMM requirements.
3. Complex Terramechanics: Establish a vision for the long term
terramechanics approaches that overcome the limitations of existing models.
4. Intelligent Vehicle Mobility: Identify unique mobility metrics and M&S
methods necessary for mobility assessments of intelligent vehicles.
5. Uncertainty Treatment: Identify the steps required to embed stochastic
characteristics of vehicle and terrain data to extend the current deterministic
mobility metrics.
6. Verification & Validation (V&V): Implement near-term vehicle-terrain
interaction benchmarks for verification of candidate NG-NRMM M&S software
solutions and lay the groundwork for long term validation data.
Unclassified, Distribution A

Autonomy Levels for Unmanned Systems (ALFUS)*
* H.-M. Huang, ALFUS, SAE 4S4D Committee
Unclassified, Distribution A

On-Board Driver (16 mph max) Remote Driver (50 mph max)
6W Limit 19W
Driver Vertical Acceleration
14
Rough Road Driving: Onboard vs. Remote Driver
Unclassified, Distribution A

Mobility Enhancement: Human-Machine Partnership
62 mph
50 mph (19W)
16 mph (6W)
Smooth Road: Engine Limit
Rough Road/Remote
Driver: Engine & Durability
Limit
Rough Road/On-Board Driver: 6W Limit
15Unclassified, Distribution A

Effect of Autonomy on Tradespace
Enhanced Mobility
Increased ProtectionPayload
Increased Tradespace
16Unclassified, Distribution A

Latency: major issue in teleoperation
Connectivity Round Trip Communication Delay
Wired 10 ms (local), 300 ms (cross-country)
Wireless Dependent on bandwidth and distance
Satellite 500 ms (GEO)
Video transmission 300 ms - 1000 ms (one way; frame rate dependent)
17Unclassified, Distribution A
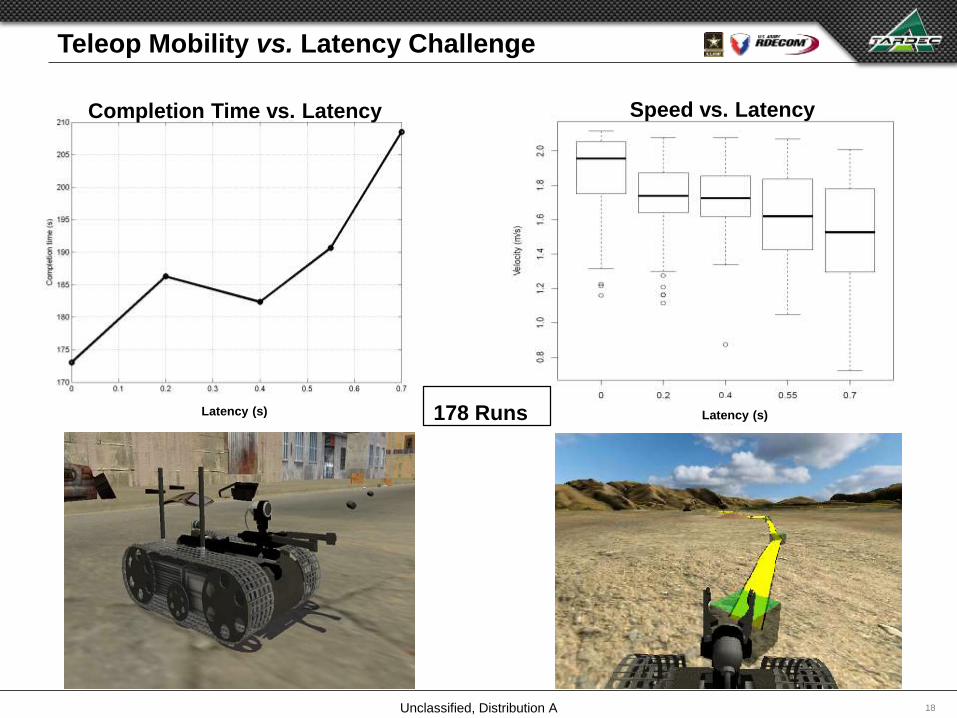
Completion Time vs. Latency Speed vs. Latency
178 RunsLatency (s) Latency (s)
18
Teleop Mobility vs. Latency Challenge
Unclassified, Distribution A

Latency Studies
19
Measurement
Studies
Compensation
Studies
Unclassified, Distribution A

Building the Cybersecurity Competency
20
Penetration TestingReverse EngineeringBuilding New Tools
Transitioning ResearchIntegrating Commercial Tech
Leveraging Public-Private Partnerships to Deliver Advanced Capabilities
HACMS
AMAS GVR-Bot
(High Assurance Cyber Military Systems)
HACMS is a shift away from “patch and pray”
methods that approach cybersecurity from a reactive standpoint
UNCLASSIFIED: Distribution Statement A. Approved for public release; distribution is unlimited.
UNCLASSIFIED: Distribution Statement A. Approved for public release; distribution is unlimited.

Unclassified, Distribution A
21