from consensus to robust algorithms: symmetrizationcontrolpde2014.cnam.fr/sarlette.pdffrom consensus...
TRANSCRIPT

From consensus to robust algorithms: symmetrization
Alain Sarlette Luca Mazzarella Francesco TicozziU.Gent U.Padova
CNAM Paris, March 2014
Padova / Dartmouth

Classical consensus algorithm
x1
x2
x3 x4
xN
x...
x...

Classical consensus algorithm
x1
x2
x3 x4
xN
x...
x...

!
Consensus: reaching agreement x1 = x2 = ... = xN is the basis for many distributed computing tasks Very flexible and robust convergence: as long as the network integrated over some finite T forms a connected graph and α(t) ∈ [αm, αM] ⊂ (0,1)
Classical consensus algorithm
x1
x2
x3 x4
xN
x...
x...

Convergence proof idea:shrinking convex hull
xk(t+1) ( xj(t) – xk(t) ) + xk(t)α(t)

!
!
!
highest value xc can only decrease, lowest xd can only increase
Convergence proof idea:shrinking convex hull
xk(t+1) ( xj(t) – xk(t) ) + xk(t)α(t)

Quantum computing promises unprecedented power
Our initial goal:Bringing consensus into quantum regime

Quantum computing promises unprecedented power
Our initial goal:Bringing consensus into quantum regime
what about “the cloud” ?
Quantum distributed computing

Quantum computing promises unprecedented power
Our initial goal:Bringing consensus into quantum regime
Consensus in networks with quantum dynamics
what about “the cloud” ?
Quantum distributed computing

Quantum computing promises unprecedented power
Our initial goal:Bringing consensus into quantum regime
Consensus in networks with quantum dynamics
what about “the cloud” ?
Quantum distributed computing
In fact rather applications to measurement: get to a state where local properties reflect the global ones

Quantum computing promises unprecedented power
Our initial goal:Bringing consensus into quantum regime
Consensus in networks with quantum dynamics
what about “the cloud” ?
Quantum distributed computing
In fact rather applications to measurement: get to a state where local properties reflect the global ones
Simplified discussion with similar flavor: consensus for discrete probability distributions

Question I:Defining consensus in tensor product space?
Standard consensus
N systems, each with state value xk in RD
➯ overall state vector (x1, x2,... , xN) in RM with M = D*NConsensus means equal states x1 = x2 = ... = xN
Quantum / probability distributions consensus
N systems, each one associated to a Hilbert space CD
➯ overall joint state on CM with M = DN
How define consensus w.r.t. correlations, entanglement,... ?

Standard consensus
Basis for RD*N obtained by cartesian product e.g. for N=3:
( e(1)×0×0 ,..., e(D)×0×0, 0×e(1)×0 ,..., 0×e(D)×0, 0×0×e(1) ,..., 0×0×e(D) )
!
Consensus on probability distributions
Basis for R obtained by tensor product e.g. for N=3:
( e(1)⊗e(1)⊗e(1) , e(2)⊗e(1)⊗e(1) ,..., e(D)⊗e(1)⊗e(1) ,
e(1)⊗e(1)⊗e(2) , e(2)⊗e(1)⊗e(2) ,..., e(D)⊗e(1)⊗e(2) , e(1)⊗e(2)⊗e(1) ,..., e(D)⊗e(2)⊗e(1) , ... ... e(1)⊗e(D)⊗e(D) , e(2)⊗e(D)⊗e(D) ,..., e(D)⊗e(D)⊗e(D) )
(DN)
Question I:Defining consensus in tensor product space?

Standard consensus
Basis for RD*N obtained by cartesian product e.g. for N=3:
( e(1)×0×0 ,..., e(D)×0×0, 0×e(1)×0 ,..., 0×e(D)×0, 0×0×e(1) ,..., 0×0×e(D) )
!
Consensus on probability distributions
Basis for R obtained by tensor product e.g. for N=3:
( e(1)⊗e(1)⊗e(1) , e(2)⊗e(1)⊗e(1) ,..., e(D)⊗e(1)⊗e(1) ,
e(1)⊗e(1)⊗e(2) , e(2)⊗e(1)⊗e(2) ,..., e(D)⊗e(1)⊗e(2) , e(1)⊗e(2)⊗e(1) ,..., e(D)⊗e(2)⊗e(1) , ... ... e(1)⊗e(D)⊗e(D) , e(2)⊗e(D)⊗e(D) ,..., e(D)⊗e(D)⊗e(D) )
(DN)
Question I:Defining consensus in tensor product space?
⟨1 1 1⟩ , ⟨2 1 1⟩, ... , ⟨D 1 1⟩ ... ⟨1 D D⟩ , ... , ⟨D D D⟩
e.g. coefficient of ⟨D 1 2⟩gives probability of case
“system 1 is in state D system 2 is in state 1 system 3 is in state 2”
)

Standard consensus
System states xk are directly accessible for computation, can be linearly combined, copied, communicated...
!
Quantum / probability consensus
The whole quantum state / proba distribution cannot be measured
➯ We must physically exchange “things”
Question II:How to write a consensus algorithm?

!
1. Defining quantum consensus !
2. Quantum consensus algorithm !
3. Generalization: group-theoretic consensus
Outline

!
1. Defining quantum consensus !
2. Quantum consensus algorithm !
3. Generalization: group-theoretic consensus
Outline
Simplified discussion with similar flavor: consensus for discrete probability distributions

Are these distribution-consensus states ?
pX = ⟨1 1 1⟩ + ⟨1 1 3⟩ + ⟨2 2 2⟩13_ 1
3_ 1
3_

Are these distribution-consensus states ?
agents have same marginal distribution for Fk(X) = (-1)Xk but not for Xk
➯ depends on sigma-algebra
pX = ⟨1 1 1⟩ + ⟨1 1 3⟩ + ⟨2 2 2⟩13_ 1
3_ 1
3_

Are these distribution-consensus states ?
agents have same marginal distribution for Fk(X) = (-1)Xk but not for Xk
➯ depends on sigma-algebra
pX = ⟨1 1 1⟩ + ⟨1 1 3⟩ + ⟨2 2 2⟩13_ 1
3_ 1
3_
pX = ⟨1 1 2⟩ + ⟨1 1 1⟩ + ⟨2 2 1⟩13_ 1
3_ 1
3_

Are these distribution-consensus states ?
agents have same marginal distribution for Fk(X) = (-1)Xk but not for Xk
➯ depends on sigma-algebra
pX = ⟨1 1 1⟩ + ⟨1 1 3⟩ + ⟨2 2 2⟩13_ 1
3_ 1
3_
pX = ⟨1 1 2⟩ + ⟨1 1 1⟩ + ⟨2 2 1⟩13_ 1
3_ 1
3_
agents have same marginal distribution pXk = 23_ ⟨1⟩ + ⟨2⟩1
3_

Are these distribution-consensus states ?
agents have same marginal distribution for Fk(X) = (-1)Xk but not for Xk
➯ depends on sigma-algebra
pX = ⟨1 1 1⟩ + ⟨1 1 3⟩ + ⟨2 2 2⟩13_ 1
3_ 1
3_
pX = ⟨1 1 2⟩ + ⟨1 1 1⟩ + ⟨2 2 1⟩13_ 1
3_ 1
3_
pX = ⟨1 2 2⟩ + ⟨2 2 1⟩ + ⟨2 1 2⟩13_ 1
3_ 1
3_
agents have same marginal distribution pXk = 23_ ⟨1⟩ + ⟨2⟩1
3_

Are these distribution-consensus states ?
agents have same marginal distribution for Fk(X) = (-1)Xk but not for Xk
➯ depends on sigma-algebra
pX = ⟨1 1 1⟩ + ⟨1 1 3⟩ + ⟨2 2 2⟩13_ 1
3_ 1
3_
pX = ⟨1 1 2⟩ + ⟨1 1 1⟩ + ⟨2 2 1⟩13_ 1
3_ 1
3_
joint distribution is permutation invariant
pX = ⟨1 2 2⟩ + ⟨2 2 1⟩ + ⟨2 1 2⟩13_ 1
3_ 1
3_
agents have same marginal distribution pXk = 23_ ⟨1⟩ + ⟨2⟩1
3_

Are these distribution-consensus states ?
agents have same marginal distribution for Fk(X) = (-1)Xk but not for Xk
➯ depends on sigma-algebra
pX = ⟨1 1 1⟩ + ⟨1 1 3⟩ + ⟨2 2 2⟩13_ 1
3_ 1
3_
pX = ⟨1 1 2⟩ + ⟨1 1 1⟩ + ⟨2 2 1⟩13_ 1
3_ 1
3_
joint distribution is permutation invariant
pX = ⟨1 2 2⟩ + ⟨2 2 1⟩ + ⟨2 1 2⟩13_ 1
3_ 1
3_
agents have same marginal distribution pXk = 23_ ⟨1⟩ + ⟨2⟩1
3_
UI
UI
Hierarchy of consensus definitions
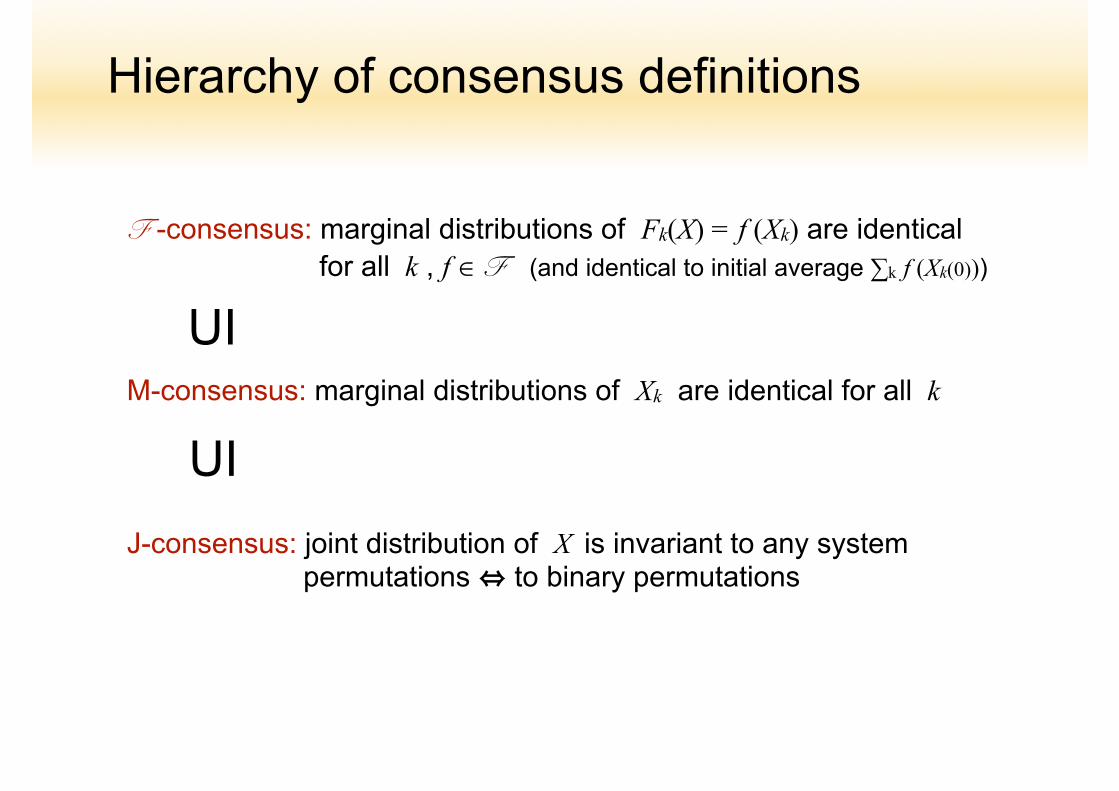
F -consensus: marginal distributions of Fk(X) = f (Xk) are identical for all k , f ∈ F (and identical to initial average ∑k f (Xk(0)))
M-consensus: marginal distributions of Xk are identical for all k
J-consensus: joint distribution of X is invariant to any system permutations ⇔ to binary permutations
UI
UI

Hierarchy of consensus definitions
F -consensus: marginal distributions of Fk(X) = f (Xk) are identical for all k , f ∈ F (and identical to initial average ∑k f (Xk(0)))
M-consensus: marginal distributions of Xk are identical for all k
J-consensus: joint distribution of X is invariant to any system permutations ⇔ to binary permutations
UI
UI
⇔ also correlations are “symmetrized”: imagine a joint function on m variables; its distribution will not depend on the selected m-subset of variables

Classical consensus in CdxN is agreement on the value of each component 1,2,...,d of “a vector” Distribution consensus in CdxN is agreement on the (possibly correlated) probability values assigned to each option 1,2,...,d
These are two mathematically different things: the distribution consensus of “probably x=1” and “probably x=2” will NOT be “probably x=1.5”
What it means...

!
1. Defining quantum consensus !
2. Quantum consensus algorithm !
3. Generalization: group-theoretic consensus
Outline

The classical consensus algorithm
A basic element: gossip iteration at each time step, select one pair of systems ( j, k ) that are admitted to interact, let them update their states according to:
where and

Gossip viewed as partial swapping
at each time step, select one pair of systems ( j, k ) that are admitted to interact, let them update their states according to:
swap
stay in place

Gossip viewed as partial swapping
at each time step, select one pair of systems ( j, k ) that are admitted to interact, let them update their states according to:
Such mixture of two unitary operations: stay in place and swap can be easily implemented physically in quantum systems or, for that matter, in a probability distribution setting
swap
stay in place

Gossip viewed as partial swapping
at each time step, select one pair of systems ( j, k ) that are admitted to interact, let them update their states according to:
Such mixture of two unitary operations: stay in place and swap can be easily implemented physically in quantum systems or, for that matter, in a probability distribution setting
swap
stay in placep p
p

Gossip consensus on probabilities
Example: two systems with probability distribution on {0,1}
Initially: generally not a consensus state
pX = a ⟨0 0⟩ + b ⟨0 1⟩ + c ⟨1 0⟩ + (1-a-b-c) ⟨1 1⟩

Gossip consensus on probabilities
Example: two systems with probability distribution on {0,1}
Initially: generally not a consensus state
pX = a ⟨0 0⟩ + b ⟨0 1⟩ + c ⟨1 0⟩ + (1-a-b-c) ⟨1 1⟩
12_ Gossip: swap the two systems with probability , else stay

Gossip consensus on probabilities
Example: two systems with probability distribution on {0,1}
Initially: generally not a consensus state
pX = a ⟨0 0⟩ + b ⟨0 1⟩ + c ⟨1 0⟩ + (1-a-b-c) ⟨1 1⟩
12_ Gossip: swap the two systems with probability , else stay
Finally: pX = a ⟨0 0⟩ + b ⟨0 1⟩ + c ⟨1 0⟩ + (1-a-b-c) ⟨1 1⟩ with proba 1/2 pX = a ⟨0 0⟩ + b ⟨1 0⟩ + c ⟨0 1⟩ + (1-a-b-c) ⟨1 1⟩ with proba 1/2
pX = a ⟨0 0⟩ + (⟨1 0⟩ + ⟨0 1⟩) + (1-a-b-c) ⟨1 1⟩ is a joint-distribution consensus state
b+c2
swap
stay
total

The gossip convergence carries overto quantum consensus or distributions
If there exists T > 0 such that the pairs selected during [t , t+T ] form a connected graph for all t > 0 (with high probability) and α(t) ∈ [αm, αM] ⊂ (0,1)
Then the gossip algorithm “stay in place and swap” drives a quantum distribution towards J-consensus (with high probability)
Moreover P∞ = 1/N! ∑π Permπ(P0) is the projection of the initial distribution onto the consensus set, so in the end-state each subsystem mirrors average properties of the whole P0

The exact values of α(t) , and even the selected interaction at each time step, need not be exactly controlled ➯ strong robustness
In principle not restricted to pairwise swaps ( j, k ): we could mixswaps among subsystems belonging to larger neighborhoods
The consensus algorithm is very general

The consensus algorithm is very general
The exact values of α(t) , and even the selected interaction at each time step, need not be exactly controlled ➯ strong robustness
In principle not restricted to pairwise swaps ( j, k ): we could mixswaps among subsystems belonging to larger neighborhoods
Convergence proofs:
Directly with eigenvalues (if cyclic edge choice) or Lyapunov function
Indirectly, investigating the dynamics of permutation operators:
opens more general perspective

!
1. Defining quantum consensus !
2. Quantum consensus algorithm !
3. Generalization: group-theoretic consensus
Outline

Consider a linear action a(g,x) of G on X !!
Target : symmetrization reach a state x ∈ X where a(g,x) = x for all g ∈ G
Operations as discrete group actions
(finite) group
vector space with objects “of interest”
− − −
Property: the projection on the symmetrization set can be written

Consider a linear action a(g,x) of G on X !!
Dynamics :
with the defining a convex combination over G at each t Usually sg(t) ≠0 only for g belonging to a very restricted subset of G
Operations as discrete group actions
(finite) group
vector space with objects “of interest”
− −

G = permutations group X = vectors of RN*D a(g,x) = ( ∏(g) ⊗ I ) x with ∏(g) the permutation matrix on N elements !Symmetrization: target state x should be invariant to any subsystem permutations !Gossip iterations: sg(t) ≠0 for g=e at any time for some t-dependent pairwise permutation g=(j,k)
Example: classical consensus
−

* The state x(t) at any time can be written as a convex combination !!* The dynamics can then be lifted to the vector p(t) and written as !!!
Lift from actions to G
with p independent of x(0)

* The state x(t) at any time can be written as a convex combination !!* The dynamics can then be lifted to the vector p(t) and written as !!!
Lift from actions to G
with p independent of x(0)
The lift is unique iff all actions are linearly independent ⇔The lift is unique if we want to consider things on the group thatshould work for any possible action associated to the group.

!!
starting point pg(0) = δ(g,e) target pg = 1/|G| for all g
We get to consensus … on the group
−

!!
starting point pg(0) = δ(g,e) target pg = 1/|G| for all g
We get to consensus … on the group
−
~
New Markov chain has as nodes the components of G. This can be a large number, e.g. |G| = N! for permutation group
Doubly stochastic transition matrix M(t) is not built from individual transitions, rather from ∏h each containing |G| transitions
In particular: associated to directed balanced graph

!
!!!!!Proof: * possible by analogy with classical consensus * alternative: use entropy of p(t) as strict Lyapunov function
Convergence to p holds if:–

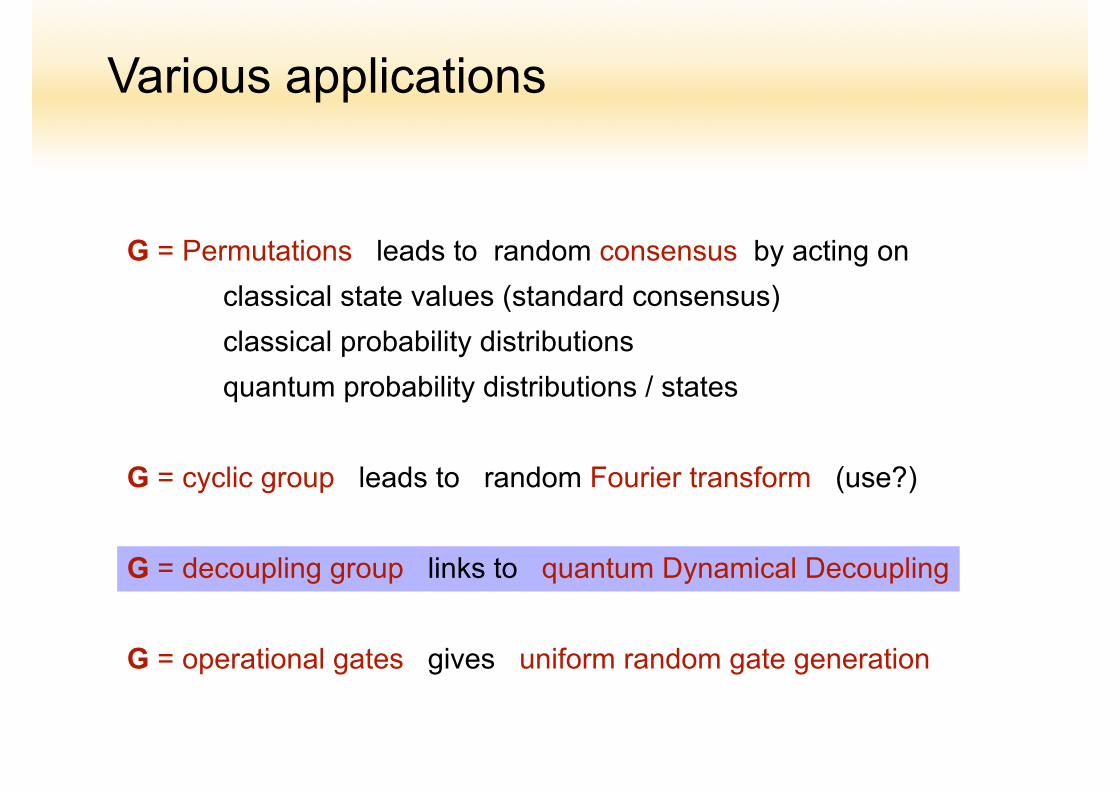
G = Permutations leads to random consensus by acting on classical state values (standard consensus) classical probability distributions quantum probability distributions / states !G = cyclic group leads to random Fourier transform (use?) !G = decoupling group links to quantum Dynamical Decoupling !G = operational gates gives uniform random gate generation
Various applications

G = Permutations leads to random consensus by acting on classical state values (standard consensus) classical probability distributions quantum probability distributions / states !G = cyclic group leads to random Fourier transform (use?) !G = decoupling group links to quantum Dynamical Decoupling !G = operational gates gives uniform random gate generation
Various applications

G = cyclic group { e = w0 = wN, w1, w2, ..., wN-1 } with possible representation w = exp( 2πi / N )
!Action on RNxN : X a(w,X) = S X D –1 with D = diag(1, w, w2, w3, … , wN-1)
S =
Example: random Fourier transform

Starting with X = x 1T where x = [x0 , x1 , x2 … , xN-1] ∈ RN
⇒ after symmetrization the first line contains F(x)
!In practice (?)
Example: random Fourier transform

Starting with X = x 1T where x = [x0 , x1 , x2 … , xN-1] ∈ RN
⇒ after symmetrization the first line contains F(x)
!In practice (?)
Example: random Fourier transform
☹ using NxN matrix for an N-length signal
☺ mixing can be sloppy: any α(t) ∈ [αm, αM] ⊂ (0,1) will do
☺ different powers of w can be ~arbitrarily mixed ⇒ robust iterative algorithm for the Fourier transform
G = Permutations leads to random consensus by acting on classical state values (standard consensus) classical probability distributions quantum probability distributions / states !G = cyclic group leads to random Fourier transform (use?) !G = decoupling group links to quantum Dynamical Decoupling !G = operational gates gives uniform random gate generation
Various applications

QDD ≡ open-loop rejection of bias driving
Basic example: sphere S1 (≡ qubit in quantum control)
Question: How can we guarantee that any x(0) ∈ S1 gets back to x(T) ≡ x(0) after known T ?
H constant unknown
[literature: Lorenza Viola et al.]

QDD ≡ open-loop rejection of bias driving
Solution 1: if direction z of H is known
Evolution on 2dt=T/N: exp(Hz dt) Roty(π) exp(Hz dt) Roty(π) = exp(Hz dt) exp(-Hz dt) Roty(π) Roty(π) = I
H constant unknown
z
yapply Roty(π) every T/2N N integer, y⊥z
[literature: “spin echo”]

H constant unknown
QDD ≡ open-loop rejection of bias driving
Solution 2: unknown direction
~ this corrects any bias around y⊥ (as before), similarly around z⊥ thus components on all of x,z,y
NB: approximate correction, improves with larger N
z
yapply N times the sequence:
Roty(π) Rotz(π) Roty(π) Rotz(π)

!State space SU(n), dynamics , H unknown ∈ S
Find discrete group G s.t. H = ∑g∈G UgH Ug† = µ I for all H ∈ S Choose an order g1,g2,…,g|G| in G Every dt=T/(N|G|), switch the system with operator U(gk+1 gk-1)
Then to first order, the evolution on [0,T] is exp(-iH T) = exp(-iµI) i.e. the effect of H is countered
– 1 |G|—
–
General case
QDD ≡ open-loop rejection of bias driving
Robust QDD inspired by symmetrization
(Only) key point: spend equal times with variable changed by Ug for each g ∈ G
⇔ symmetrize allocated time with action a(h,H) = UhH Uh†What does the consensus algorithm give in this interpretation?

Robust QDD inspired by symmetrization
Symmetrization algorithm iteratively constructs the control signal: for n=0,1,…
divide time-slot between two jumps in parts {A,B}; apply a(gn, .) on part A; apply a(e, .) = I on part B; end This gives 2n switches after n iterations !
Converges to as n→∞ , even with random gn & uneven parting A/B

G = Permutations leads to random consensus by acting on classical state values (standard consensus) classical probability distributions quantum probability distributions / states !G = cyclic group leads to random Fourier transform (use?) !G = decoupling group links to quantum Dynamical Decoupling !G = operational gates gives uniform random gate generation
Various applications

A symmetrizing circuit generates a random gate
The action of each gatet is pseudo-random, e.g. ∈ { a(w,y), I } ⇔ The distribution of y(t) = ∑g pg(t) a(g , y(0)) follows
!!
with sh(t) characterizing gatet, and robustly converges to a uniformly distributed random gate as t→∞
gate1y(0) gate2 gate3 gateT… y(T)

!
1. Defining quantum consensus !
2. Quantum consensus algorithm !
3. Generalization: group-theoretic consensus
Outline

References: L.Mazzarella, F.Ticozzi, A.S.
arXiv:1311.3364 and arXiv:1303.4077
!
Direct extension to continuous-time dynamicsor thermalization approach (getting "symmetrization in time") !Realistic implementations / applications: find more of them !! !Quantum speed-up like for quantum random walk ?
References & Future work ...