fractal robots.ppt
TRANSCRIPT

ROBOTS
FRACTAL
By:B.ShruthiB.ManjulaJ.Spandana
REVOLUTION
Robots are automatic artificial life forms that can perform useful work
Fractal robot is a science that promises to revolutionize technology in a way that has never been witnessed before.
FRACTALS
Fractal is anything which has substantial measure of statistical self similarity

FRACTAL ROBOTS
Fractal robot is a group of homogeneous electronic cubes controlled by an operating system
They are the hardware equivalent of computer software.
Cubes are embedded with the chips that control their movement
Smallest expected size is b/w 1000 to 10,000 atoms wide
CONSTRUCTION
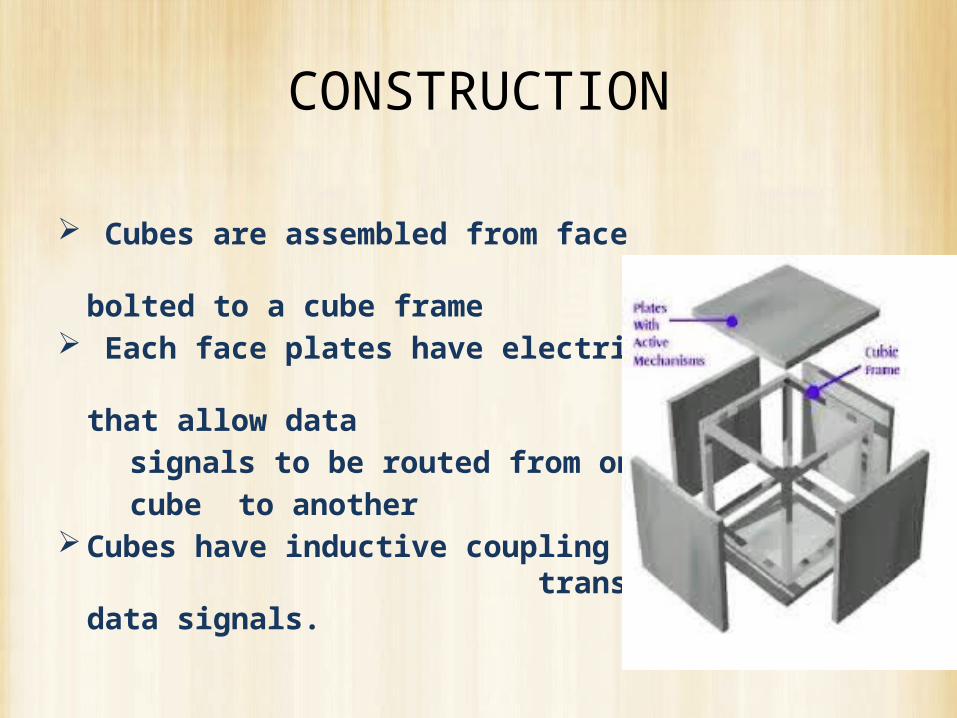
Cubes are assembled from face plates bolted to a cube frame
Each face plates have electrical contact pads that allow data
signals to be routed from one cube to another Cubes have inductive coupling to
transmit power and data signals.
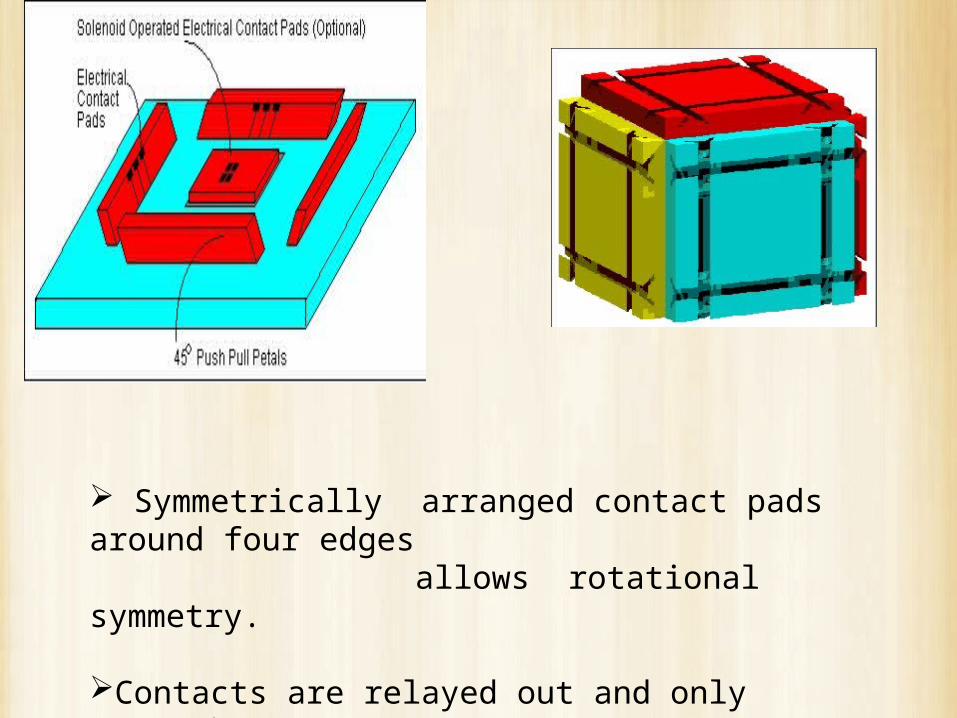
Symmetrically arranged contact pads around four edges allows rotational symmetry.
Contacts are relayed out and only transmit power .
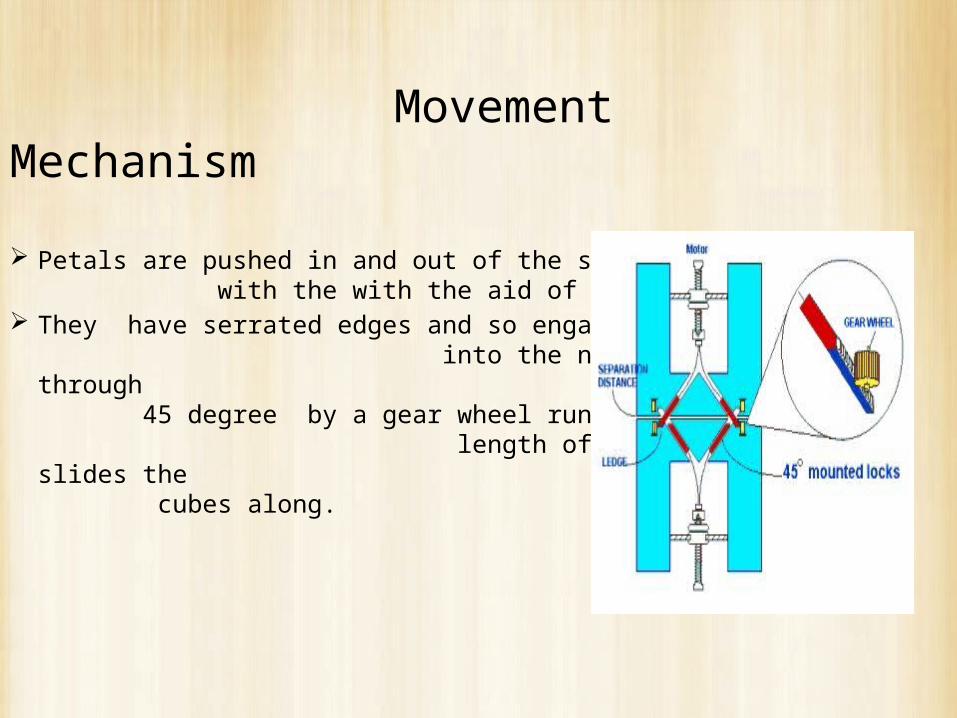
Movement Mechanism
Petals are pushed in and out of the slot with the with the aid of a motor.
They have serrated edges and so engage into the neighboring cube through 45 degree by a gear wheel running the length of the slot which slides the cubes along.
Fractal Movements

Implementation Of Computer Control
Cubes have a microcontroller to perform basic operations.
The largest component of the Fractal Robot system is the software
Fractal architecture dominates the functions of the core of the O.S, the data structures, the implementation of the devices etc.
Fractal O.S
Plays a crucial role in making the integration of the system seamless and feasible.
Uses some features to achieve these goals. 1. Transparent data communication 2. Data compression at all levels 3. Awareness of built in self repair.
Fractal Bus: A Fractal bus permits Hardware and software
to merge seamlessly into one unified data structure.
It helps in sending and receiving fractally
controlled data.
MOVEMENT ALGORITHMS
these are called as digital matter control.There are only three basic movement
algorithms. · Pick and place · N-streamers · L-streamers

Pick and place
Commands are issued to a collection of cubes telling each cube where to go.
A command of "cube 517 move left by 2 positions" results in only one cube moving in the entire machine.
Eg: When ever a shell or bomb comes the wall read just itself to dodge them

N-Streamers
• A cube is pushed out from the surface, and then another cube is moved into the vacant position. �
• The new cube is joined to the tail of the growing rod and pushed out again to grow the rod. ��
• For bridge building applications, the tentacles are grown vertically to make tall posts.

L-streamers L-shape of cubes numbered 4, 5, 6 are attached to a rod numbered 1, 2, 3
a new cube 7 is added so that the rod grows by one cube.
Cubes 7&6 are moved till 5,6&7 forms an L shape

By grouping cubes and moving them, any structure can be programmed easily within minutes
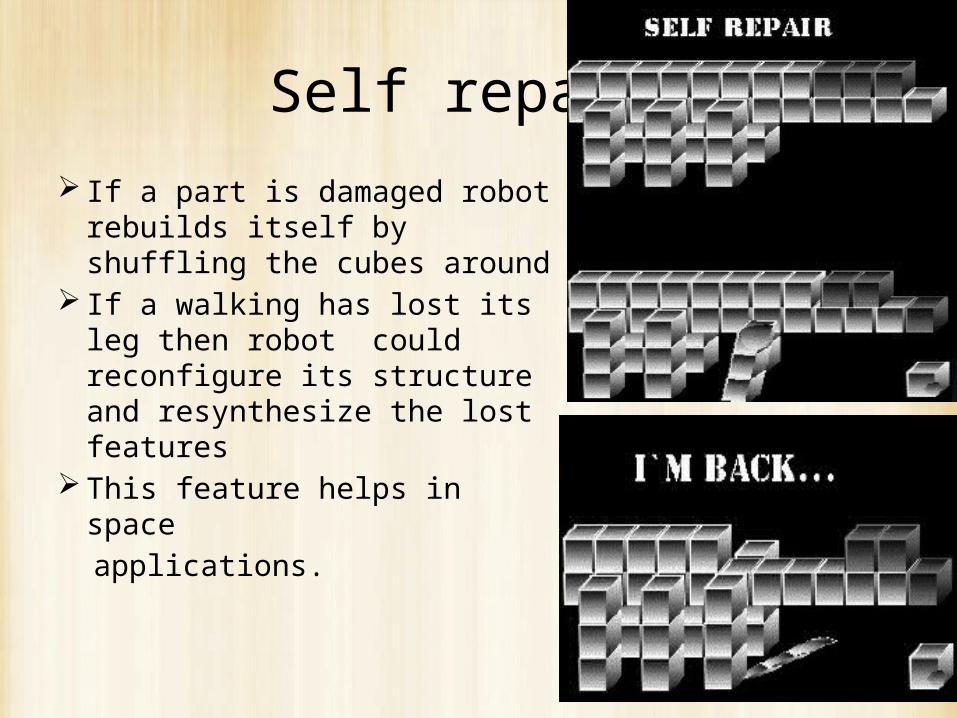
Self repair:
If a part is damaged robot rebuilds itself by shuffling the cubes around
If a walking has lost its leg then robot could reconfigure its structure and resynthesize the lost features
This feature helps in space applications.
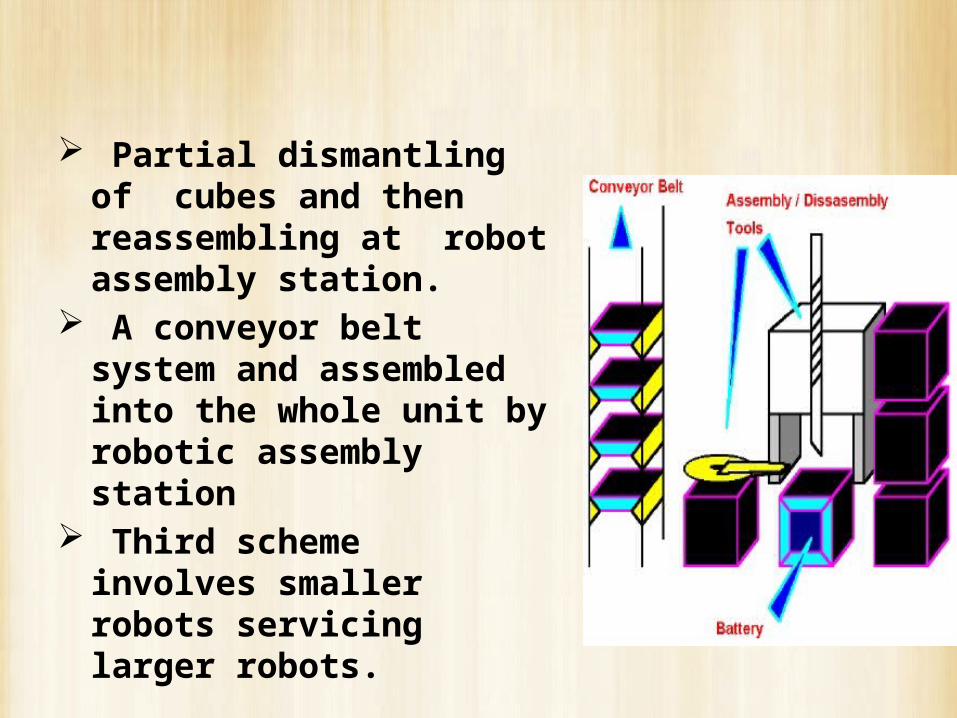
Partial dismantling of cubes and then reassembling at robot assembly station.
A conveyor belt system and assembled into the whole unit by robotic assembly station
Third scheme involves smaller robots servicing larger robots.

APPLICATIONS :
1. Bridge building:
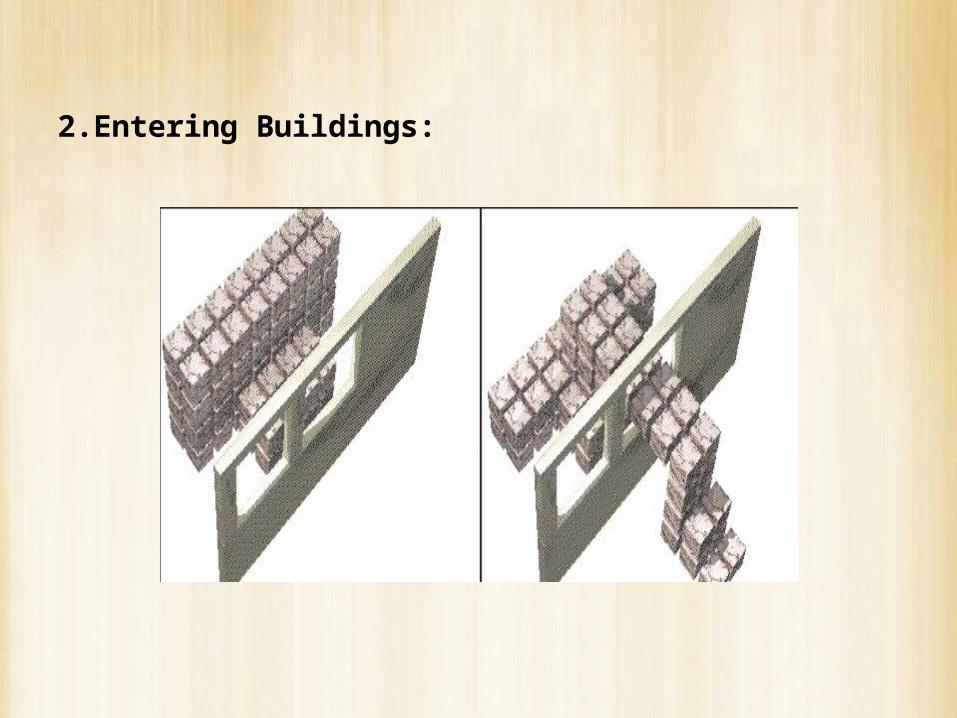
2.Entering Buildings:

3. Medical Field:
4.Defense Technology:

5.Space Exploration:
LIMITATIONS
• Technology is still in infancy• Current cost is very high• Needs very precise & flexible controlling
software.
First commercial cubes were estimately sold in the year 2000


QUERIES ?