fp1 matrices past exam questions - … of london academy 1 fp1 matrices past exam questions matrix...
TRANSCRIPT
City of London Academy 1
FP1 MATRICES PAST EXAM QUESTIONS Matrix questions are pretty much all standard and plain-vanilla. Q.11 is a bit more difficult just because it is a long question with a lot of working. Q.12 (d) and Q.13 onwards from the first printing have been deleted because they ask for knowledge now not included in FP1.
1. The rectangle R has vertices at the points (0, 0), (1, 0), (1, 2) and (0, 2).
(a) Find the coordinates of the vertices of the image of R under the transformation given by the matrix where a is a constant.
(3)
(b) Find det A, giving your answer in terms of a. (1)
Given that the area of the image of R is 18,
(c) find the value of a. (3)
(Total 7 marks)
2. The matrix R is given by R =
(a) Find R2.
(2)
(b) Describe the geometrical transformation represented by R2.
(2)
,11–
5
aA
2
1
2
12
1
2
1
City of London Academy 2
(c) Describe the geometrical transformation represented by R. (1)
(Total 5 marks)
3. Use the method of mathematical induction to prove that, for n e +,
(a)
(7)
(b) f(n) = 4n + 6n – 1 is divisible by 3.
(7)
(Total 14 marks)
4. M = where a is a real constant.
(a) Given that a = 2, find M–1
. (3)
(b) Find the values of a for which M is singular. (2)
(Total 5 marks)
5. Write down the 2 × 2 matrix that represents
(a) an enlargement with centre (0, 0) and scale factor 8, (1)
nn
nnn
1–
1
01–
12
,6
32
a
a
City of London Academy 3
(b) a reflection in the x-axis. (1)
Hence, or otherwise,
(c) find the matrix T that represents an enlargement with centre (0, 0) and scale factor 8, followed by a reflection in the x-axis.
A = and B = where k and c are constants.
(2)
(d) Find AB. (3)
Given that AB represents the same transformation as T,
(e) find the value of k and the value of c. (2)
(Total 9 marks)
6. A = , where a is real.
(a) Find det A in terms of a. (2)
(b) Show that the matrix A is non-singular for all values of a. (3)
Given that a = 0,
(c) find A–1
.
24
16,
6
1
c
k
42
5
a
a

City of London Academy 4
(3)
(Total 8 marks)
7. M =
(a) Describe fully the geometrical transformation represented by the matrix M. (2)
The transformation represented by M maps the point A with coordinates (p, q) onto the point B with coordinates (3√2, 4√2).
(b) Find the value of p and the value of q. (4)
(c) Find, in its simplest surd form, the length OA, where O is the origin. (2)
(d) Find M2.
(2)
The point B is mapped onto the point C by the transformation represented by M2.
(e) Find the coordinates of C. (2)
(Total 12 marks)
2
1
2
12
1
2
1
City of London Academy 5
8. , where a and b are constants and a > 0.
(a) Find R2 in terms of a and b.
(3)
Given that R2 represents an enlargement with centre (0, 0) and scale factor 15,
(b) find the value of a and the value of b. (5)
(Total 8 marks)
9. , where a is a constant.
(a) Find the value of a for which the matrix A is singular.
(2)
(b) Find B–1
. (3)
The transformation represented by B maps the point P onto the point Q.
Given that Q has coordinates (k – 6, 3k + 12), where k is a constant,
(c) show that P lies on the line with equation y = x + 3. (3)
(Total 8 marks)
ba
a 2R
41–
2–aA
41–
2–3B
City of London Academy 6
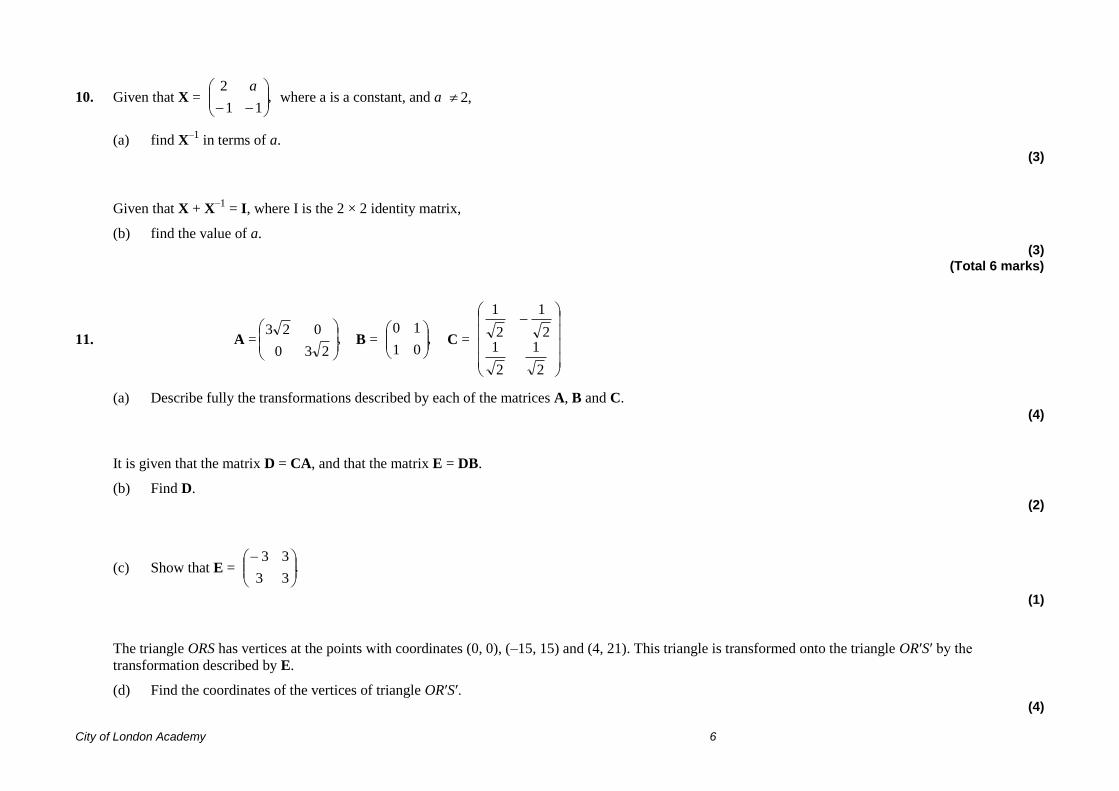
10. Given that X = where a is a constant, and a
(a) find X–1
in terms of a. (3)
Given that X + X–1
= I, where I is the 2 × 2 identity matrix,
(b) find the value of a. (3)
(Total 6 marks)
11. A = B = C =
(a) Describe fully the transformations described by each of the matrices A, B and C. (4)
It is given that the matrix D = CA, and that the matrix E = DB.
(b) Find D. (2)
(c) Show that E =
(1)
The triangle ORS has vertices at the points with coordinates (0, 0), (–15, 15) and (4, 21). This triangle is transformed onto the triangle OR′S′ by the
transformation described by E.
(d) Find the coordinates of the vertices of triangle OR′S′. (4)
,11
2
a,2
,230
023
,
01
10
2
1
2
12
1
2
1
.33
33
City of London Academy 7
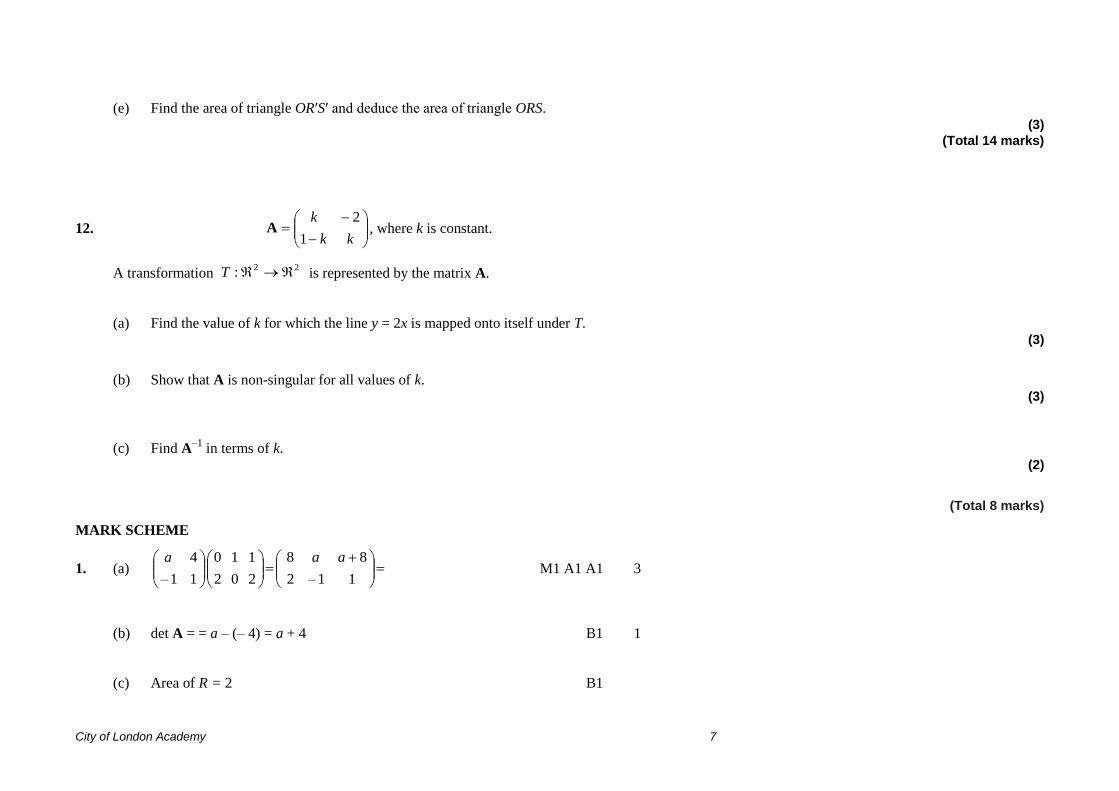
(e) Find the area of triangle OR′S′ and deduce the area of triangle ORS. (3)
(Total 14 marks)
12. , where k is constant.
A transformation is represented by the matrix A.
(a) Find the value of k for which the line y = 2x is mapped onto itself under T. (3)
(b) Show that A is non-singular for all values of k. (3)
(c) Find A–1
in terms of k. (2)
(Total 8 marks)
MARK SCHEME
1. (a) M1 A1 A1 3
(b) det A = = a – (– 4) = a + 4 B1 1
(c) Area of R = 2 B1
kk
k
1
2A
22: T
1
8
1–2
8
2
1
0
1
2
0
11–
4 aaa
City of London Academy 8
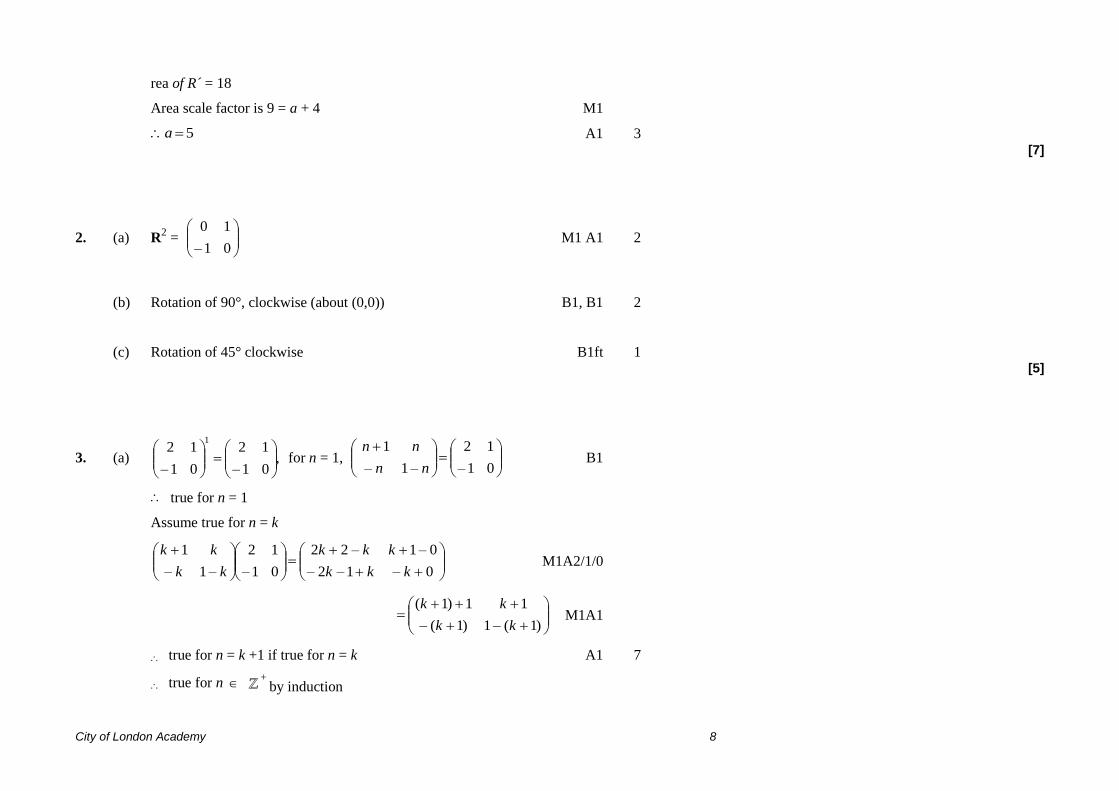
rea of R´ = 18
Area scale factor is 9 = a + 4 M1
A1 3 [7]
2. (a) R2 = M1 A1 2
(b) Rotation of 90°, clockwise (about (0,0)) B1, B1 2
(c) Rotation of 45° clockwise B1ft 1 [5]
3. (a) for n = 1, B1
true for n = 1
Assume true for n = k
M1A2/1/0
M1A1
true for n = k +1 if true for n = k A1 7
true for n +
by induction
5a
01–
10
,01–
12
01–
121
01–
12
–1–
1
nn
nn
0–1–2–
0–1–22
01–
12
–1–
1
kkk
kkk
kk
kk
)1(–1)1(–
11)1(
kk
kk
City of London Academy 9
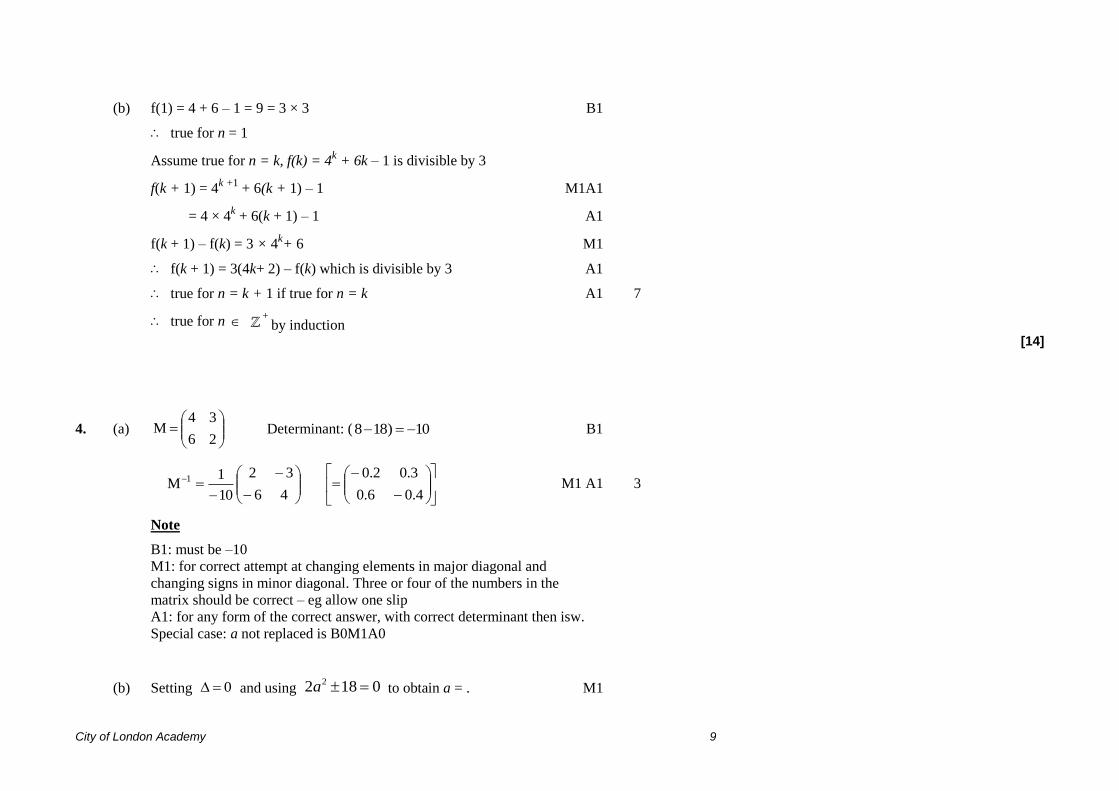
(b) f(1) = 4 + 6 – 1 = 9 = 3 × 3 B1
true for n = 1
Assume true for n = k, f(k) = 4k + 6k – 1 is divisible by 3
f(k + 1) = 4k +1
+ 6(k + 1) – 1 M1A1
= 4 × 4k + 6(k + 1) – 1 A1
f(k + 1) – f(k) = 3 × 4k+ 6 M1
f(k + 1) = 3(4k+ 2) – f(k) which is divisible by 3 A1
true for n = k + 1 if true for n = k A1 7
true for n +
by induction
[14]
4. (a) Determinant: ( B1
M1 A1 3
Note
B1: must be –10
M1: for correct attempt at changing elements in major diagonal and
changing signs in minor diagonal. Three or four of the numbers in the
matrix should be correct – eg allow one slip
A1: for any form of the correct answer, with correct determinant then isw.
Special case: a not replaced is B0M1A0
(b) Setting and using to obtain a = . M1
26
34M 10)188
4.06.0
3.02.0
46
32
10
1M 1
022 18 0a
City of London Academy 10
A1 cso 2
Note
Two correct answers, a = ±3, with no working is M1A1
Just a = 3 is M1A0, and also one of these answers rejected is A0.
Need 3 to be simplified (not ).
[5]
5. (a) B1 1
(b) B1 1
(c) M1 A1 2
Note
M1: Accept multiplication of their matrices either way round
(this can be implied by correct answer)
A1: cao
(d) M1 A1 A1 3
Note
M1: Correct matrix multiplication method implied by one or two
correct terms in correct positions.
A1: for three correct terms in correct positions
3a
9
80
08
10
01
10
01T
80
08
80
08
824
06
6
1
24
16AB
ck
ck
c
k
City of London Academy 11
2nd
A1: for all four terms correct and simplified
(e) “ “ and “ “ Form equations
and solve simultaneously M1
k = 2 and c = –4 A1 2
Alternative method
M1: AB = T B = A–1
T = and compare elements to find k and c.
Then A1 as before.
Note
M1: follows their previous work but must give two equations from
which k and c can be found and there must be attempt at solution
getting to k = or c =.
A1: is cao (but not cso – may follow error in position of 4k + 2c earlier). [9]
6. (a) det A = a(a + 4) – (–5 × 2) = a2 + 4a + 10 M1A1 2
Notes
Correct use of ad – bc for M1
(b) a2 + 4a + 10 = (a + 2)
2 + 6 M1A1ft
Positive for all values of a, so A is non-singular A1cso 3
Notes
Attempt to complete square for M1
Alt 1
Attempt to establish turning point (e.g. calculus, graph) M1
Minimum value 6 for A1ft
Positive for all values of a A is non-singular for A1 cso
Alt 2
Attempt at b2 – 4ac for M1. Can be part of quadratic formula
86 ck 024 ck
City of London Academy 12
Their correct –24 for first A1
No real roots or equivalent, so A is non-singular for final A1cso
(c) A–1
= B1 for B1M1A1 3
Notes
Swap leading diagonal, and change sign of other diagonal,
with numbers or a for M1
Correct matrix independent of ‘their award’ final A1
[8]
7. (a) 45° or rotation (anticlockwise), about the origin B1, B1 2
Note
More than one transformation 0/2
(b) M1
p – q = 6 and p + q = 8 or equivalent M1A1
p = 7 and q = 1 both correct A1 4
Note
Second M1 for correct matrix multiplication to give two equations
Alternative
02
54
10
1
10
1
10
1
4
24
23
2
1
2
12
1
2
1
q
p
City of London Academy 13
M–1
= First M1A1
Second M1 A1
(c) Length of OA (= length of OB) = M1, A1 2
Note
Correct use of their p and their q award M1
(d) M2 = M1A1 2
(e) so coordinates are (–4√2, 3√2) M1A1 2
Note
Accept column vector for final A1.
Order of matrix multiplication needs to be correct to award Ms [12]
8. (a) R2 = M1 A1 A1 3
2
1
2
12
1
2
1
1
7
24
23
2
1
2
12
1
2
1
2550,17 22
01
10
2
1
2
12
1
2
1
2
1
2
12
1
2
1
24
23
01
10
aba
aa2
2 2
22
22
ba
ba
City of London Academy 14
Note
1 term correct: M1 A0 A0
2 or 3 terms correct: M1 A1 A0
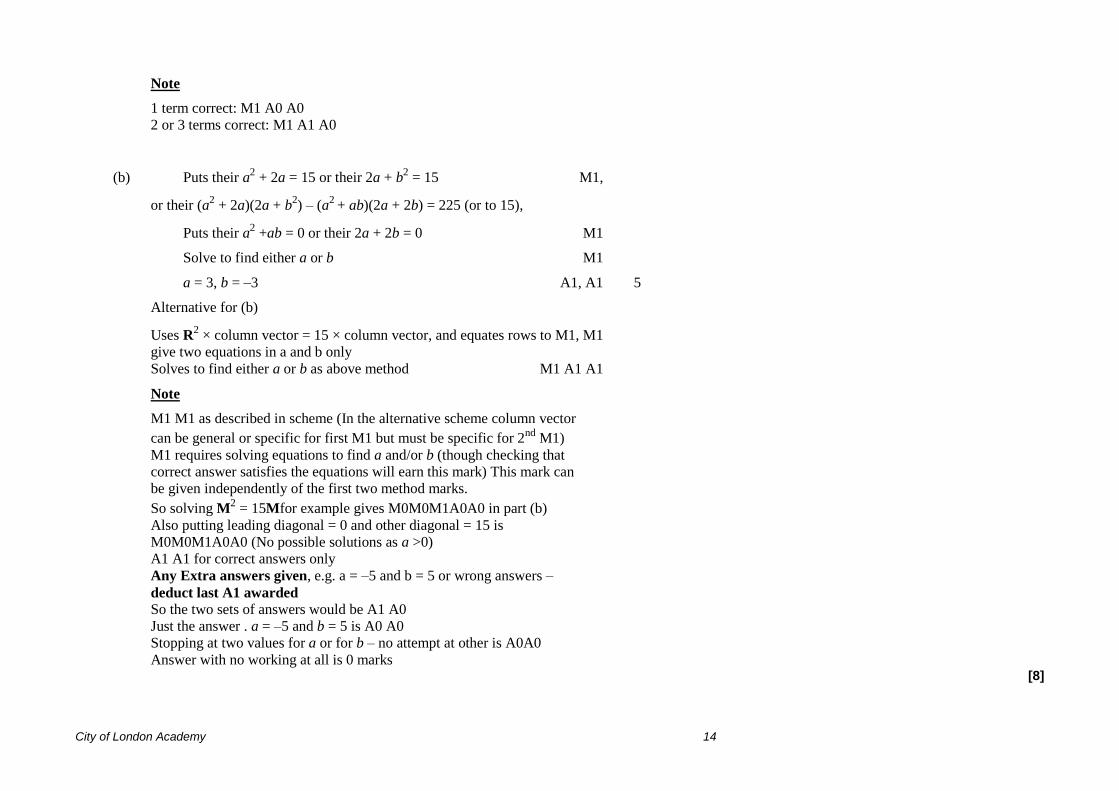
(b) Puts their a2 + 2a = 15 or their 2a + b
2 = 15 M1,
or their (a2 + 2a)(2a + b
2) – (a
2 + ab)(2a + 2b) = 225 (or to 15),
Puts their a2 +ab = 0 or their 2a + 2b = 0 M1
Solve to find either a or b M1
a = 3, b = –3 A1, A1 5
Alternative for (b)
Uses R2 × column vector = 15 × column vector, and equates rows to M1, M1
give two equations in a and b only
Solves to find either a or b as above method M1 A1 A1
Note
M1 M1 as described in scheme (In the alternative scheme column vector
can be general or specific for first M1 but must be specific for 2nd
M1)
M1 requires solving equations to find a and/or b (though checking that
correct answer satisfies the equations will earn this mark) This mark can
be given independently of the first two method marks.
So solving M2 = 15Mfor example gives M0M0M1A0A0 in part (b)
Also putting leading diagonal = 0 and other diagonal = 15 is
M0M0M1A0A0 (No possible solutions as a >0)
A1 A1 for correct answers only
Any Extra answers given, e.g. a = –5 and b = 5 or wrong answers –
deduct last A1 awarded So the two sets of answers would be A1 A0
Just the answer . a = –5 and b = 5 is A0 A0
Stopping at two values for a or for b – no attempt at other is A0A0
Answer with no working at all is 0 marks [8]

City of London Academy 15
9. (a) Use 4a – (–2 × –1) = 0 M1, A1 2
Note
Allow sign slips for first M1
(b) Determinant: (3 × 4) – (–2 × –1) = 10 (Δ) M1
B–1
= M1 A1cso 3
Note
Allow sign slip for determinant for first M1 (This mark may be
awarded for 1/10 appearing in inverse matrix.)
Second M1 is for correctly treating the 2 by 2 matrix, ie for
Watch out for determinant (3 + 4) – (–1 + –2) = 10 – M0 then
final answer is A0
(c) , = M1, A1ft
Lies on y = x + 3 A1 3
Alternative:
, = , M1, A1,
2
1,a
31
24
10
1
31
24
123
6–
31
24
10
1
k
k
)123(3)6–(
)123(2)6–(4
10
1
kk
kk
3k
k
341–
2–3
x
x
)3(4–
)3(2–3
xx
xx
City of London Academy 16
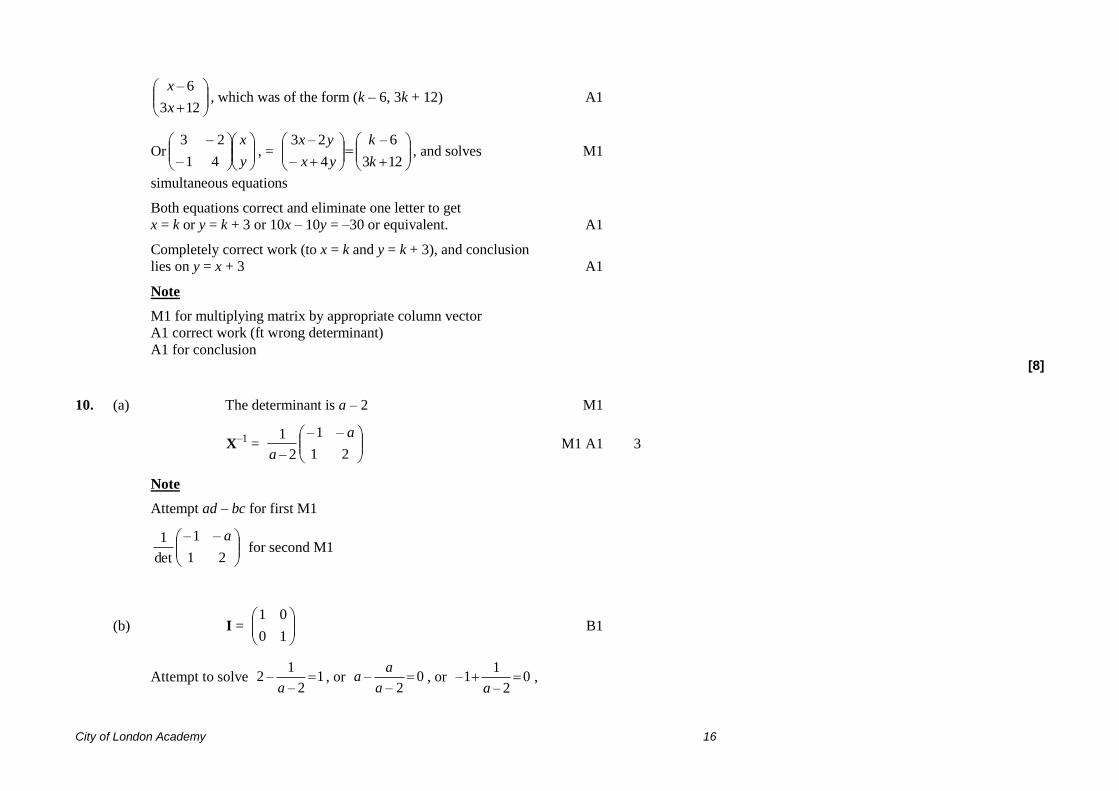
, which was of the form (k – 6, 3k + 12) A1
Or , = , and solves M1
simultaneous equations
Both equations correct and eliminate one letter to get
x = k or y = k + 3 or 10x – 10y = –30 or equivalent. A1
Completely correct work (to x = k and y = k + 3), and conclusion
lies on y = x + 3 A1
Note
M1 for multiplying matrix by appropriate column vector
A1 correct work (ft wrong determinant)
A1 for conclusion [8]
10. (a) The determinant is a – 2 M1
X–1
= M1 A1 3
Note
Attempt ad – bc for first M1
for second M1
(b) I = B1
Attempt to solve , or , or ,
123
6–
x
x
y
x
41–
2–3
123
6–
4–
2–3
k
k
yx
yx
21
–1–
2–
1 a
a
21
–1–
det
1 a
10
01
12–
1–2
a0
2––
a
aa 0
2–
11–
a

City of London Academy 17
or M1
To obtain a = 3 only A1 cso 3
Alternatives for (b)
If they use X2
+ I = X they need to identify I for B1, then attempt
to solve suitable equation for M1 and obtain a = 3 for A1
If they use X2 + X
–1 = O, they can score the B1then marks for solving
If they use X3 + I = O they need to identify I for B1, then attempt to solve
suitable equation for M1 and obtain a = 3 for A1
Note
Final A1 for correct solution only [6]
11. (a) A represents an enlargement scale factor 3 (centre O) M1 A1
B represents reflection in the line y = x B1
C represents a rotation of , i.e.45° (anticlockwise) (about O) B1 4
Note
Enlargement for M1
3 for A1
(b) M1 A1 2
Note
Answer incorrect, require CD for M1
12–
21–
a
2
4
2
33
3–3
City of London Academy 18
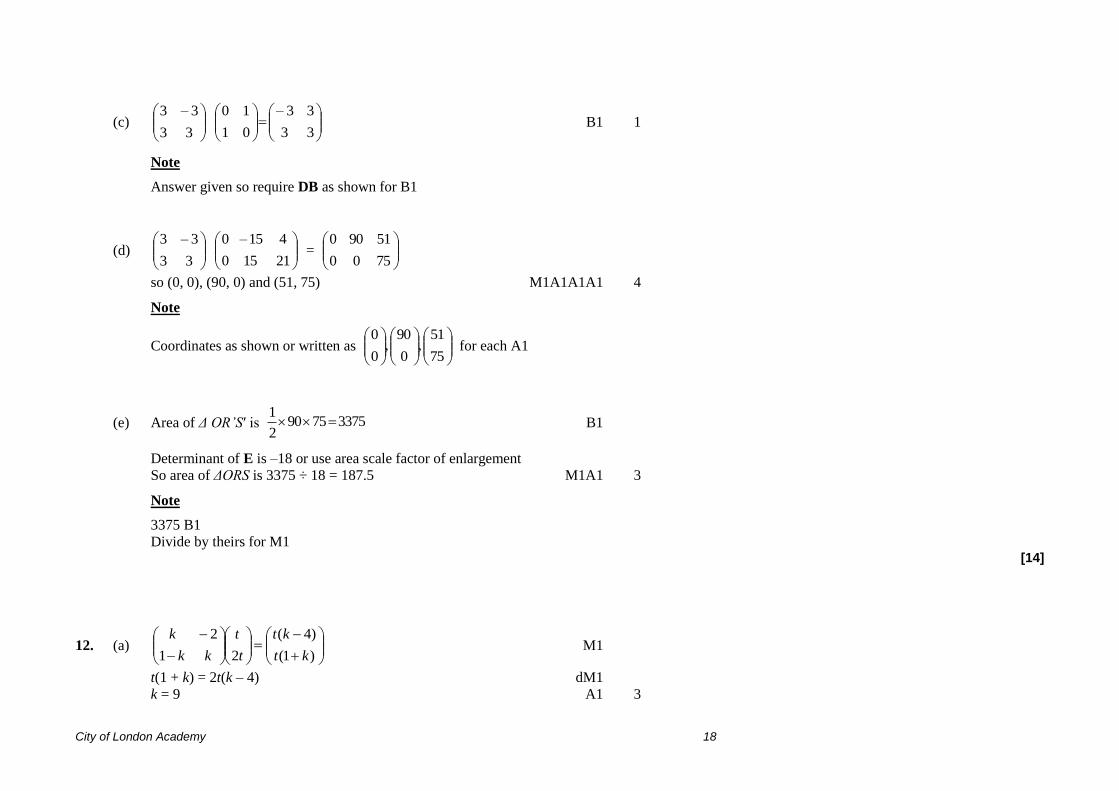
(c) B1 1
Note
Answer given so require DB as shown for B1
(d) =
so (0, 0), (90, 0) and (51, 75) M1A1A1A1 4
Note
Coordinates as shown or written as for each A1
(e) Area of Δ OR’S′ is B1
Determinant of E is –18 or use area scale factor of enlargement
So area of ΔORS is 3375 ÷ 18 = 187.5 M1A1 3
Note
3375 B1
Divide by theirs for M1 [14]
12. (a) M1
t(1 + k) = 2t(k – 4) dM1
k = 9 A1 3
33
3–3
33
33–
01
10
33
3–3
21
4
15
15–
0
0
75
51
0
90
0
0
75
51,
0
90,
0
0
337575902
1
)1(
)4(
21
2
kt
kt
t
t
kk
k

City of London Academy 19
(b) det A = k2 + 2(1 – k) (Must be seen in part (b)) M1
= (k – 1)2 + 1, which is always positive M1
A is non-singular A1cso 3
2nd
M: Alternative is to use quadratic formula on the quadratic
equation, or to use the discriminant, with a comment
about ‘no real roots’, or ‘can’t equal zero’, or a comment
about the condition for singularity.
A1 Conclusion.
(c) A–1
= M1A1 2
M: Need , k’s unchanged and attempt to change
sign for either – 2 (leaving as top right) or
1 – k (leaving as bottom left).
[14]
1. No Report available for this question.
2. No Report available for this question.
3. No Report available for this question.
4. Generally this was a very accessible question where the vast majority of candidates gained full marks. They had a clear understanding of the process to find the inverse matrix and were able
to apply it successfully in most cases. There were some arithmetical errors in finding the determinant and some candidates could not deal with the structure of the inverse matrix. A few did
not substitute the given value for a. A much longer method involving simultaneous equations was much more prone to errors and fortunately not seen very often. In part (b) most understood the definition of a singular matrix and were able to solve their quadratic equation to give two accurate values for a. Some rejected the negative solution however, losing the last mark.
2
842x
kk
k
kk 1
2
22
12
Adet their
1
City of London Academy 20
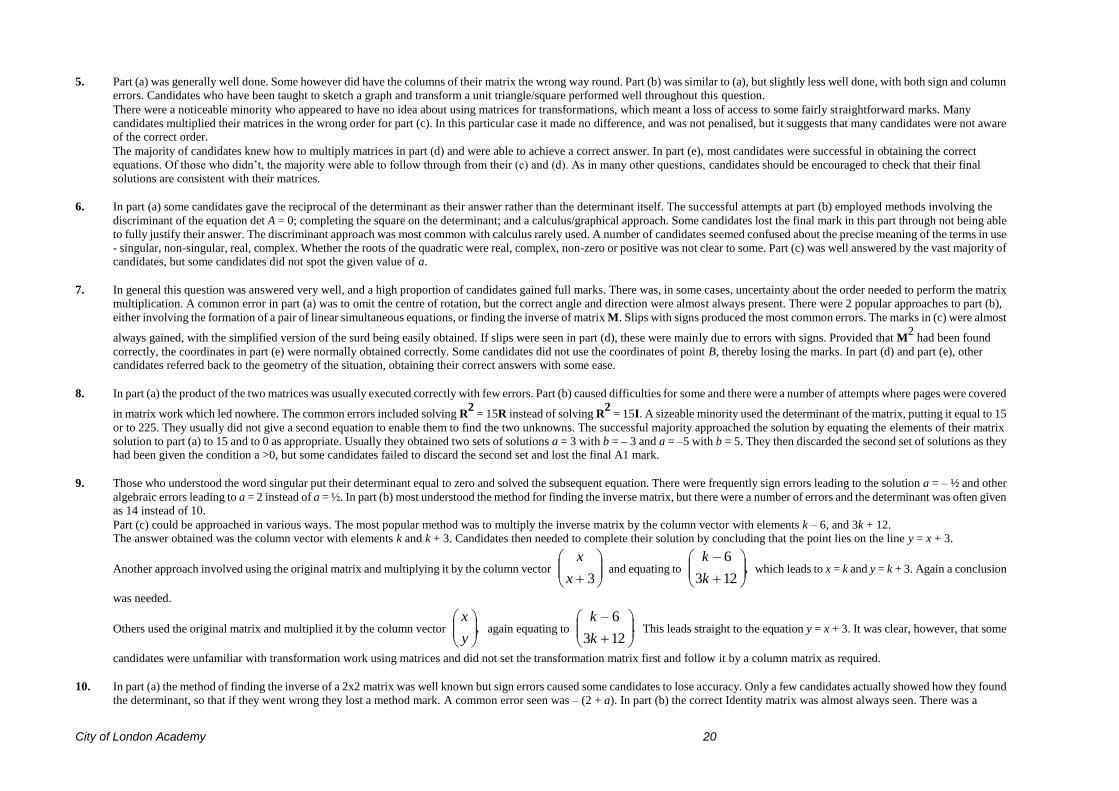
5. Part (a) was generally well done. Some however did have the columns of their matrix the wrong way round. Part (b) was similar to (a), but slightly less well done, with both sign and column
errors. Candidates who have been taught to sketch a graph and transform a unit triangle/square performed well throughout this question.
There were a noticeable minority who appeared to have no idea about using matrices for transformations, which meant a loss of access to some fairly straightforward marks. Many
candidates multiplied their matrices in the wrong order for part (c). In this particular case it made no difference, and was not penalised, but it suggests that many candidates were not aware of the correct order.
The majority of candidates knew how to multiply matrices in part (d) and were able to achieve a correct answer. In part (e), most candidates were successful in obtaining the correct
equations. Of those who didn’t, the majority were able to follow through from their (c) and (d). As in many other questions, candidates should be encouraged to check that their final
solutions are consistent with their matrices.
6. In part (a) some candidates gave the reciprocal of the determinant as their answer rather than the determinant itself. The successful attempts at part (b) employed methods involving the
discriminant of the equation det A = 0; completing the square on the determinant; and a calculus/graphical approach. Some candidates lost the final mark in this part through not being able
to fully justify their answer. The discriminant approach was most common with calculus rarely used. A number of candidates seemed confused about the precise meaning of the terms in use
- singular, non-singular, real, complex. Whether the roots of the quadratic were real, complex, non-zero or positive was not clear to some. Part (c) was well answered by the vast majority of candidates, but some candidates did not spot the given value of a.
7. In general this question was answered very well, and a high proportion of candidates gained full marks. There was, in some cases, uncertainty about the order needed to perform the matrix
multiplication. A common error in part (a) was to omit the centre of rotation, but the correct angle and direction were almost always present. There were 2 popular approaches to part (b),
either involving the formation of a pair of linear simultaneous equations, or finding the inverse of matrix M. Slips with signs produced the most common errors. The marks in (c) were almost
always gained, with the simplified version of the surd being easily obtained. If slips were seen in part (d), these were mainly due to errors with signs. Provided that M2
had been found
correctly, the coordinates in part (e) were normally obtained correctly. Some candidates did not use the coordinates of point B, thereby losing the marks. In part (d) and part (e), other candidates referred back to the geometry of the situation, obtaining their correct answers with some ease.
8. In part (a) the product of the two matrices was usually executed correctly with few errors. Part (b) caused difficulties for some and there were a number of attempts where pages were covered
in matrix work which led nowhere. The common errors included solving R2
= 15R instead of solving R2
= 15I. A sizeable minority used the determinant of the matrix, putting it equal to 15
or to 225. They usually did not give a second equation to enable them to find the two unknowns. The successful majority approached the solution by equating the elements of their matrix
solution to part (a) to 15 and to 0 as appropriate. Usually they obtained two sets of solutions a = 3 with b = – 3 and a = –5 with b = 5. They then discarded the second set of solutions as they had been given the condition a >0, but some candidates failed to discard the second set and lost the final A1 mark.
9. Those who understood the word singular put their determinant equal to zero and solved the subsequent equation. There were frequently sign errors leading to the solution a = – ½ and other
algebraic errors leading to a = 2 instead of a = ½. In part (b) most understood the method for finding the inverse matrix, but there were a number of errors and the determinant was often given as 14 instead of 10.
Part (c) could be approached in various ways. The most popular method was to multiply the inverse matrix by the column vector with elements k – 6, and 3k + 12.
The answer obtained was the column vector with elements k and k + 3. Candidates then needed to complete their solution by concluding that the point lies on the line y = x + 3.
Another approach involved using the original matrix and multiplying it by the column vector and equating to which leads to x = k and y = k + 3. Again a conclusion
was needed.
Others used the original matrix and multiplied it by the column vector again equating to This leads straight to the equation y = x + 3. It was clear, however, that some
candidates were unfamiliar with transformation work using matrices and did not set the transformation matrix first and follow it by a column matrix as required.
10. In part (a) the method of finding the inverse of a 2x2 matrix was well known but sign errors caused some candidates to lose accuracy. Only a few candidates actually showed how they found
the determinant, so that if they went wrong they lost a method mark. A common error seen was – (2 + a). In part (b) the correct Identity matrix was almost always seen. There was a
3x
x,
123
6–
k
k
,
y
x.
123
6–
k
k
City of London Academy 21
significant number of candidates who did not add the matrices correctly.
11. Part (a) was the most challenging part of this final question for many. Those who had a method of looking at images of base vectors were usually successful but in general no method was
seen leaving just a description. Part (b) and part (c) were rarely incorrect. There were some numerical errors in part (d) but most were successful although they did not always write the
answer as coordinates. A few tried to post multiply by E and gained M0. In part (e) the common error here was to use 51 rather than 75 leading to an area of 2295 for ΔOR’S’ and a final answer of 127.5 for ΔORS.
12. Candidates often found parts (a) and (b) of this question more difficult than parts (c) and (d), so it was helpful that the four parts could be tackled independently of one another.
Part (a) of the question was poorly answered. Candidates applied the matrix to a variety of different vectors including i + 2j, 2i + j, xi + yj, 2xi + yj, etc. Many correctly performed the
multiplication on xi + 2xj but then failed to use the fact that the line was mapped onto itself. By far the most common mistake was to suppose that xi + 2xj was mapped onto itself, an assumption that gave contradictory values k = 5 and k = 1. Most candidates seemed unconcerned by this contradiction.
In part (b), to show that the matrix A was non-singular for all values of k, most candidates knew that the determinant was involved and found it correctly. Although some simply established
non-singularity for the specific value of k they had found in part (a), most were able to produce a convincing proof, either by completing the square for the quadratic function or by using the
quadratic formula. Conclusions relating to non-singularity were sometimes omitted. The inverse matrix in part (c) was often correct, although it was common to see
, or other variations, instead of .
In part (d), many candidates opted to use the original matrix and solve simultaneous equations rather than to use the inverse matrix. Although there were many good solutions, a common mistake was to map Q onto P instead of P onto Q.
In part (c), where a ‘hence’ method was required, candidates clearly struggled to find the link between the given equation and the result from part (b). Those candidates who substituted
x = into the given equation were more successful in recognising this link and many who used this technique thus managed to obtain full marks, providing their conclusion was
clear. A significant minority of candidates made use of the calculator and clearly thought that simple substitution was enough, while others made very little real progress or completely omitted this part.
k
kk
kk 2
1
22
12
kk
k
kk 1
2
22
12
10cos2