formal methods for system integration michael fourman informatics the university of edinburgh
Post on 20-Dec-2015
217 views
TRANSCRIPT

Formal Methods for
System IntegrationMichael Fourman
InformaticsThe University of Edinburgh

Outline
System Integration Behaviour and abstraction Case study
– specification– design– implementation
Summary

System Integration
Specification Abstract Design Concrete Implementation
RFP
speech
ROM
DSPFPGA
custom

Synchronous Behaviour
Signal– sequence of values
– m( t )
Behaviour– relation imposed between
signals at ports
– D(c, p, q)
D
q
c
p
forall t. if c t then q t = F( p t ) else q t = G( p t )

Specification and Design
Specification– relation required between signals at ports
Design– Relating behaviour to specification
Implementation (x) Specification (x)

Abstraction
Relating levels of description – i : concreteSignals -> abstractSignal
The design taskImplementation (x) Specification (i x)

Data Abstraction
Egintegers binary representation
state state encoding
Simple case– f : concreteData -> abstractData– (interpretation x) t = f (x t)– Implementation (x) Specification (f o x)

Temporal Abstraction
Eg– micro-instructions– slowdown
Sampling as a Temporal Abstraction– s : abstractTime -> concreteTime
– (interpretation x) t = x (s t)– Implementation (x) Specification (x o s)

Synchronous Behaviour
Sampling– p when sD
s
d q
c
p
D(c when s, p when s, q when d) /\ ...

Stopclock
User-level Specification– 10 Hz clock– Display– Start/Stop button– Reset button
Stopclock
Implementation– 1MHz clock– Seven segment display
• digits need not all change on same cycle
– Buttons assumed synchronised at 1MHz • but may be pressed at any point in the 1Hz period.

Specifying the Stopclock
Stopclock(reset, stst,display) =
exists run.forall t.
display 0 = {tens = 0, secs = 0, tenths = 0}
/\ display (t+1) =
if (reset t) then {tens = 0, secs = 0, tenths = 0}
else if (run t) then (nextTime (display t))
else (display t)
...

Specifying the Stopclock
… /\ run 0 = false /\ run (t+1) = if (reset t) then false else if (stst t) then (not (run t)) else (run t)

Top-level partitioning
data and control
reset
stst runControl Data

Control Specification
Control(reset, stst, run) =
forall t.
run 0 = false
/\ run (t+1) =
if (reset t) then false
else if (stst t) then (not (run t))
else (run t)

Data Specification
Data ( reset, run, display ) =
forall t.
display 0 = {tens = 0, secs = 0, tenths = 0}
/\ display (t+1) =
if (reset t) then {tens = 0, secs = 0, tenths = 0}
else if (run t) then (nextTime (display t))
else (display t)

Abstract Hardware
6 10 10
reset
stst
run
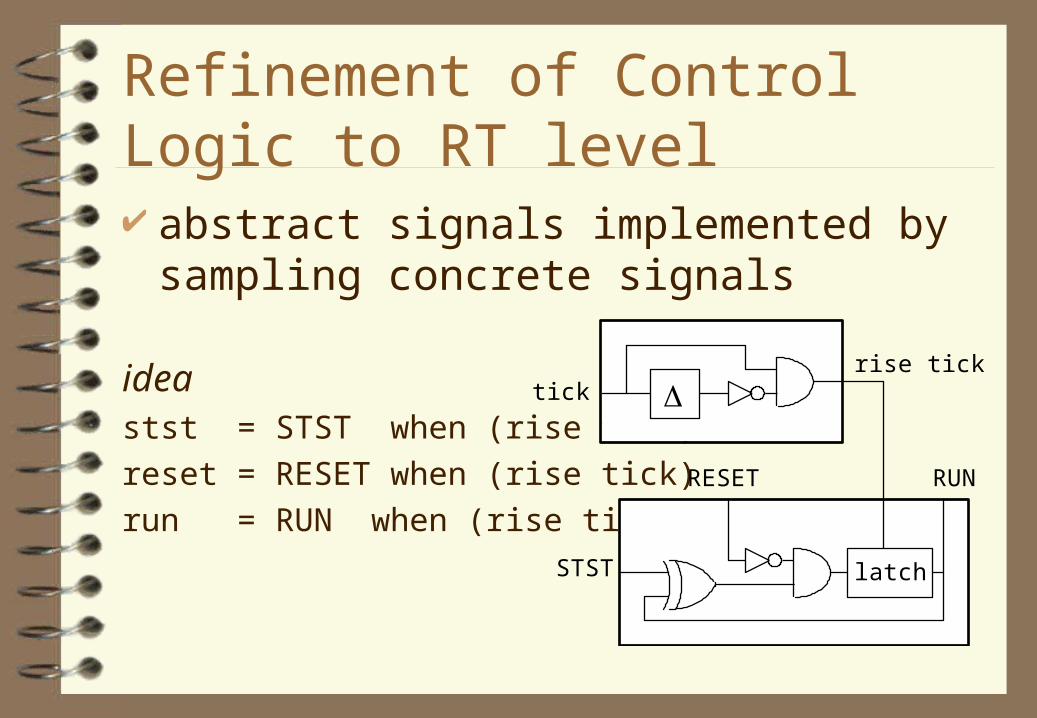
Refinement of Control Logic to RT level abstract signals implemented by
sampling concrete signals
ideastst = STST when (rise tick)
reset = RESET when (rise tick)
run = RUN when (rise tick)
tick
latch
RESET
STST
RUN
rise tick

Abstraction for the reset button
Definitionreset n = exists t.
Timeof (rise tick) n <= t
/\ t < Timeof (rise tick) (n+1)
/\ resetButton t
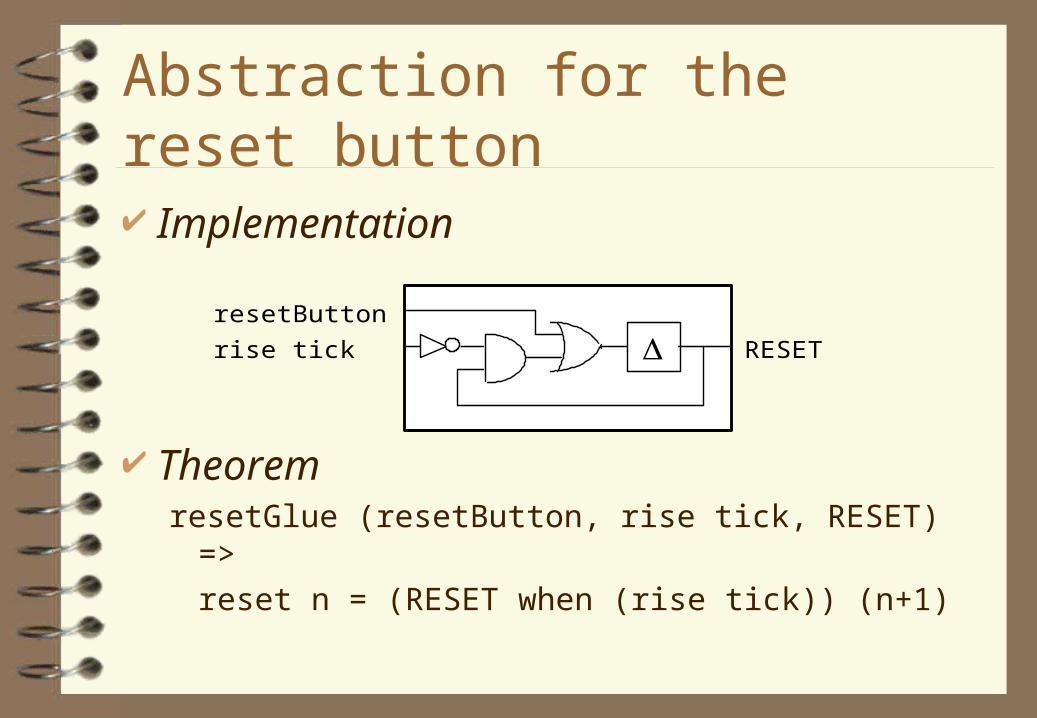
Implementation
TheoremresetGlue (resetButton, rise tick, RESET) =>
reset n = (RESET when (rise tick)) (n+1)
Abstraction for the reset button
rise tick
resetButton
RESET

Implementation
TheoremststGlue (rise ststButton, rise tick, STST) =>
stst n = (STST when (rise tick)) (n+1)
Abstraction for start-stop button
rise ststButton
rise tick STST

RTL control logic
TheoremControlImp ( tick, ststButton, resetButton, RESET, RUN ) =>
forall n. reset n = (RESET when (rise tick)) (n+1)
/\ stst n = (STST when (rise tick)) (n+1)
latch
resetButton
tick
ststButton
RESET RUN

latch
resetButton
tick
ststButton
RESET RUN
6 10 10Final Design

Summary
Specification– declarative, high-level
Design– creative and abstract
Implementation– automated (in future)