finite deformations - from statics and kinematics to...
TRANSCRIPT

Finite DeformationsFrom statics and kinematics to finite elements
Matthieu Mazière1, Jacques Besson1, Samuel Forest1
1Mines ParisTech
March 11, 2013

Outline

Notations
scalar a avector a ai2nd order tensor a∼ aij4th order tensor a∼∼
aijkl
matrices aaaVoigt notation a∼→ aaa
V(a∼.b∼)
Products. c = a .b c = ai bi
c = a∼.b ci = aij bjc∼ = a∼.b∼ cij = aik bkj
: c = a∼ : b∼ c = aij bijc∼ = a∼∼
: b∼ cij = aijkl bkl
⊗ c∼ = a ⊗ b cij = ai bjc∼∼
= a∼⊗ b∼ cijkl = aij bkl
[Einstein convention]
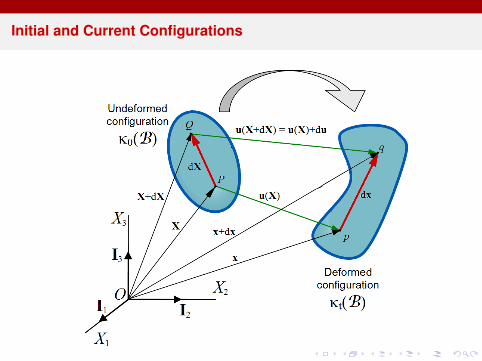
Initial and Current Configurations

Displacement and Transformation Gradient
• Displacement definitionu (X ) = x − X
• Displacement field around X
u (X + dX ) = u (X ) + du = u (X ) +∂u∂X
.dX
dx = dX + du =
„1∼+
∂u∂X
«.dX
• Transformation gradient
F∼ =∂x∂X
FiI =∂xi
∂XI

Objectivity and invariance
• Rigid body transformationx ′ = Q
∼(t).x + c (t)
• Quantities are objective if they are related by the rotation tensor as:
m′ = m
u ′ = Q∼
(t).u
T∼′ = Q
∼(t).T∼.Q
∼(t)T
• F∼ is not objective
F∼′ =
∂x ′
∂X=
∂x ′
∂x.∂x∂X
= Q∼
.F∼
• Quantities are invariant if they remain unchanged by the transformation
m′ = m, u ′ = u , T∼′ = T∼
• C∼ = F∼T .F∼ is invariant
C∼′ = F∼
′T .F∼′ = F∼
T .Q∼
T .Q∼
.F∼ = C∼
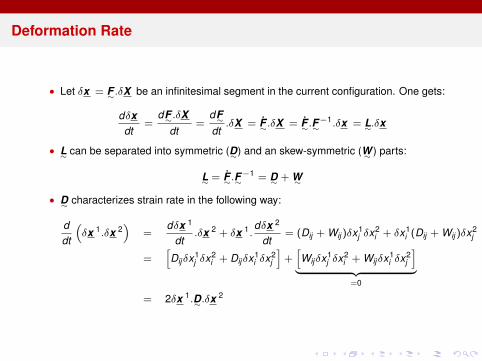
Deformation Rate
• Let δx = F∼.δX be an infinitesimal segment in the current configuration. One gets:
dδxdt
=dF∼.δX
dt=
dF∼dt
.δX = F∼.δX = F∼.F∼−1.δx = L∼.δx
• L∼ can be separated into symmetric (D∼) and an skew-symmetric (W∼ ) parts:
L∼ = F∼.F∼−1 = D∼ + W∼
• D∼ characterizes strain rate in the following way:
ddt
“δx 1.δx 2
”=
dδx 1
dt.δx 2 + δx 1.
dδx 2
dt= (Dij + Wij )δx1
j δx2i + δx1
i (Dij + Wij )δx2j
=hDijδx1
j δx2i + Dijδx1
i δx2j
i+hWijδx1
j δx2i + Wijδx1
i δx2j
i| z
=0
= 2δx 1.D∼.δx 2

Objectivity ?
• For a transformation such that: F∼′ = Q
∼(t).F∼
L∼′ = F∼
′.F∼′−1 = (Q
∼.F∼ + Q
∼.F∼).F∼
−1.Q∼−1
= Q∼
.Q∼
T + Q∼
.(D∼ + W∼ ).Q∼
T Q∼−1 = QT
= Q∼
.D∼.Q∼
T + Q∼
.Q∼
T + Q∼
.W∼ .Q∼
T
= D∼′ + W∼
′
• With
D∼′ = Q
∼.D∼.Q
∼T
W∼′ = Q
∼.W∼ .Q
∼T + Q
∼.Q∼
T
• Note that Q∼
.Q∼
T is skew-symmetric as:
Q∼
.Q∼
T = 1∼ ⇒ Q∼
.Q∼
T + Q∼
.Q∼
T= 0∼
• Only D∼ is objective

Polar Decomposition
• The deformation gradient F∼ can be decomposed, using the polar decompositiontheorem, into a product of two second-order tensors
F∼ = R∼.U∼ = V∼.R∼FiJ = RiK UKJ = Vik RkJ
with (R∼ rotation tensor)
R∼.R∼T = 1∼ U∼ = U∼
T V∼ = V∼T U∼ = R∼
T .V∼.R∼

Volume variation
• Jacobian of the transformation
J = det F∼ =VV0
> 0
• so that: ZΩ• dΩ =
ZΩ0
• JdΩ0
• Constant volume transformation means
J = 1

Deformation Tensors and Strain Measures
• Several rotation-independent symmetric deformation tensors are used inmechanics.
• Right Cauchy-Green deformation tensor [Lagrangian tensor]
C∼ = F∼T.F∼ = U∼
2 CIJ = F TIk FkJ = FkIFkJ
• Left Cauchy-Green deformation tensor [Eulerian tensor]
B∼ = F∼.F∼T = V∼
2 Bij = FiK F TKj = FiK FKj
• Additional selective rules for strain measures• Symmetric and dimensionless• Objective or invariant• Must be 0∼ for F∼ = 1∼• Must correspond to the small deformation theory for a first order Taylor expansion with
respect to F∼
Green-Lagrange E∼ =12
`C∼ − 1∼
´=
12
“U∼
2 − 1∼”
Biot strain tensor E∼Biot = U∼ − 1∼
Logarithmic strain tensor E∼log = log U∼

Principal stretches: λi
• U∼ and V∼ have the same eigenvalues λi and can be expressed as:
U∼ =3X
i=1
λi N i ⊗ N i V∼ =3X
i=1
λi n i ⊗ n i
• so that:
C∼ =3X
i=1
λ2i N i ⊗ N i B∼ =
3Xi=1
λ2i n i ⊗ n i
• One has:
V∼ = R∼.U∼.R∼T =
3Xi=1
λi (R∼.N i )⊗ (R∼.N i )
• Note also that:∂λi
∂C∼=
12λi
N i ⊗ N i
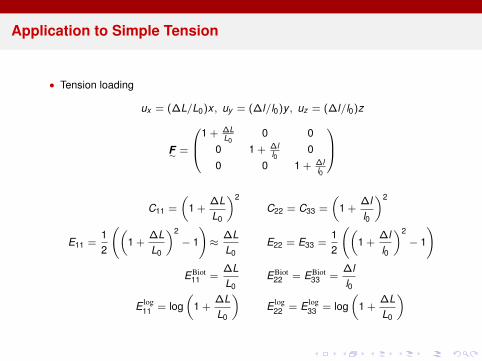
Application to Simple Tension
• Tension loading
ux = (∆L/L0)x , uy = (∆l/l0)y , uz = (∆l/l0)z
F∼ =
0B@1 + ∆LL0
0 00 1 + ∆l
l00
0 0 1 + ∆ll0
1CA
C11 =
„1 +
∆LL0
«2C22 = C33 =
„1 +
∆ll0
«2
E11 =12
„1 +
∆LL0
«2− 1
!≈
∆LL0
E22 = E33 =12
„1 +
∆ll0
«2− 1
!
EBiot11 =
∆LL0
EBiot22 = EBiot
33 =∆ll0
E log11 = log
„1 +
∆LL0
«E log
22 = E log33 = log
„1 +
∆LL0
«

Application to Simple Shear
• Simple shear
F∼ =
0@1 γ 00 1 00 0 1
1A C∼ =
0@1 γ 0γ γ2 + 1 00 0 1
1A B∼ =
0@1 + γ2 γ 0γ 1 00 0 1
1A = R∼.C∼.R∼T
• J = det F∼ = 1• R∼ has the form
R∼ =
0@cos θ − sin θ 0sin θ cos θ 0
0 0 1
1A → θ = − arctan γ/2
• Finally
U∼ = R∼T .F∼ =
0BBBB@2p
4 + γ2
γp4 + γ2
0
γp4 + γ2
γ2p4 + γ2
+2p
4 + γ20
0 0 1
1CCCCA• First order Taylor expansion
C∼ =
0@1 γ 0γ 1 00 0 1
1A = U∼ → θ = −γ
2

Outline

True or Cauchy stress tensor
• T∼ (Tij ) defined by df = T∼.n dS• Stress measure using the current configuration• Velocity gradient
L∼ = F∼.F∼−1 = D∼ + W∼
• Workw =
ZΩ
T∼ : D∼ dΩ
• Kirchhoff stress
w =
ZΩ
T∼ : D∼ dΩ =
ZΩ0
JT∼ : D∼ dΩ0 =
ZΩ0
K∼ : D∼ dΩ0
K∼ = JT∼ Kij = JTij
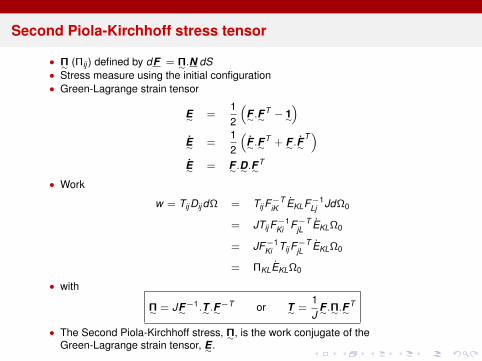
Second Piola-Kirchhoff stress tensor
• Π∼ (Πij ) defined by dF = Π∼.N dS• Stress measure using the initial configuration• Green-Lagrange strain tensor
E∼ =12
“F∼.F∼
T − 1∼”
E∼ =12
“F∼.F∼
T + F∼.F∼T”
E∼ = F∼.D∼.F∼T
• Work
w = Tij Dij dΩ = Tij F−TiK EKLF−1
Lj JdΩ0
= JTij F−1Ki F−T
jL EKLΩ0
= JF−1Ki Tij F
−TjL EKLΩ0
= ΠKLEKLΩ0
• with
Π∼ = JF∼−1.T∼.F∼
−T or T∼ =1J
F∼.Π∼.F∼T
• The Second Piola-Kirchhoff stress, Π∼, is the work conjugate of theGreen-Lagrange strain tensor, E∼.
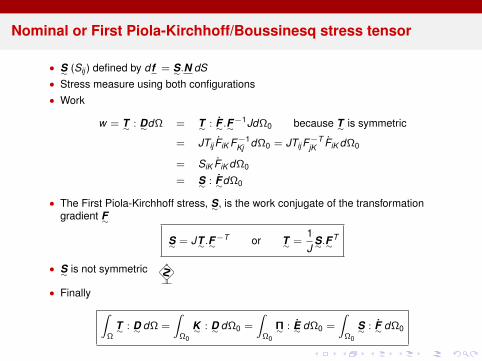
Nominal or First Piola-Kirchhoff/Boussinesq stress tensor
• S∼ (Sij ) defined by df = S∼.N dS• Stress measure using both configurations• Work
w = T∼ : D∼dΩ = T∼ : F∼.F∼−1JdΩ0 because T∼ is symmetric
= JTij FiK F−1Kj dΩ0 = JTij F
−TjK FiK dΩ0
= SiK FiK dΩ0
= S∼ : F∼dΩ0
• The First Piola-Kirchhoff stress, S∼, is the work conjugate of the transformationgradient F∼
S∼ = JT∼.F∼−T or T∼ =
1J
S∼.F∼T
• S∼ is not symmetric
• Finally ZΩ
T∼ : D∼ dΩ =
ZΩ0
K∼ : D∼ dΩ0 =
ZΩ0
Π∼ : E∼ dΩ0 =
ZΩ0
S∼ : F∼ dΩ0

Interpretation of the various stress measures: tensile test
• Transformation gradient — Cauchy stress [final configuation]
F∼ =
0@F‖ 0 00 F⊥ 00 0 F⊥
1A J = F‖F 2⊥ T∼ =
0@T 0 00 0 00 0 0
1A• Kirchhoff stress
K∼ = JT∼ K = F‖F 2⊥T K = T for incompressible materials
• Second Piola-Kirchhoff
Π∼ = JF∼−1.T∼.F∼
−T Π =F 2⊥
F‖T for incompressible materials Π =
1F 2‖
T
• First Piola-Kirchhoff stress
S∼ = JT∼.F∼−T S =
1F‖
T ≈ engineering stress

Jaumann derivative of a vector
• Constitutive laws require objectives rates• W∼ is not objective
W∼′ = Q
∼.W∼ .Q
∼T + Q
∼.Q∼
T
• so that:
Q∼
= W∼′.Q∼− Q∼
.W∼
Q∼
T= −Q
∼T .W∼
′ + W∼ .Q∼
T
• For an objective displacement vector u ′ = Q∼
.u , one gets:
u ′ = Q∼
.u + Q∼
.u = (W∼′.Q∼− Q∼
.W∼ ).u + Q∼
.u = W∼′.u ′ − Q
∼.W∼ .u + Q
∼.u
• So that:u ′ −W∼
′.u ′ = Q∼
.(u −W∼ .u )
• This allows to define an objective derivative of vectors (Jaumann rate):
u J = u −W∼ .u
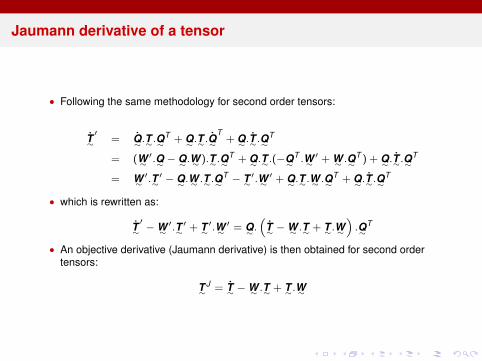
Jaumann derivative of a tensor
• Following the same methodology for second order tensors:
T∼′
= Q∼
.T∼.Q∼
T + Q∼
.T∼.Q∼
T+ Q∼
.T∼.Q∼
T
= (W∼′.Q∼− Q∼
.W∼ ).T∼.Q∼
T + Q∼
.T∼.(−Q∼
T .W∼′ + W∼ .Q
∼T ) + Q
∼.T∼.Q
∼T
= W∼′.T∼
′ − Q∼
.W∼ .T∼.Q∼
T − T∼′.W∼
′ + Q∼
.T∼.W∼ .Q∼
T + Q∼
.T∼.Q∼
T
• which is rewritten as:
T∼′ −W∼
′.T∼′ + T∼
′.W∼′ = Q
∼.“
T∼ −W∼ .T∼ + T∼.W∼”
.Q∼
T
• An objective derivative (Jaumann derivative) is then obtained for second ordertensors:
T∼J = T∼ −W∼ .T∼ + T∼.W∼

Stress rates - Truesdell stress rate
• Recall the relation between the Cauchy and the second Piola-Kirchhoff stress:
T∼ =1J
F∼.Π∼.F∼T Π∼ = JF∼
−1.T∼.F∼−T
• As Π∼ is invariant the following stress rate will be objective (it corresponds to thetransport of the rate of the second Piola-Kirchhoff stress):
T∼ =
1J
F∼.Π∼.F∼T 6= T∼
• Noting that:
Π∼ = JF∼−1.T∼.F∼
−T + JF∼−1
.T∼.F∼−T + JF∼
−1.T∼.F∼−T + JF∼
−1.T∼.F∼−T
• So that:T∼ =
JJ
T∼ + F∼.F∼−1
.T∼ + T∼.F∼−T
.F∼T + T∼
• Note thatddt
(F∼.F∼−1) = 0∼= F∼.F∼
−1 + F∼.F∼−1
• so thatF∼.F∼
−1= −L∼ and F∼
−T.F∼
T = −L∼T
• One also hasJ/J = TrL∼
• Finally, one obtains the Truesdell stress rate
T∼ = TrL∼T∼ − L∼.T∼ − T∼.L∼
T + T∼
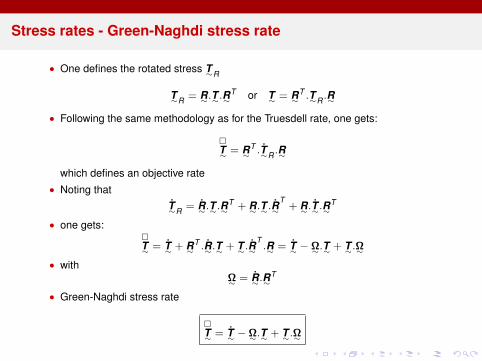
Stress rates - Green-Naghdi stress rate
• One defines the rotated stress T∼R
T∼R = R∼.T∼.R∼T or T∼ = R∼
T .T∼R .R∼
• Following the same methodology as for the Truesdell rate, one gets:
T∼ = R∼
T .T∼R .R∼
which defines an objective rate• Noting that
T∼R = R∼.T∼.R∼T + R∼.T∼.R∼
T+ R∼.T∼.R∼
T
• one gets:T∼ = T∼ + R∼
T .R∼.T∼ + T∼.R∼T.R∼ = T∼ −Ω∼.T∼ + T∼.Ω∼
• withΩ∼ = R∼.R∼
T
• Green-Naghdi stress rate
T∼ = T∼ −Ω∼.T∼ + T∼.Ω∼

Outline

Constitutive equations : hyperelasticity
• Hyperelasticity is often used for elastomers• One first defines a strain energy density function W which depends on C∼• For isotropic materials, W only depends on the invariants of C∼
I1 = TrC∼
I2 =12
“(TrC∼)2 − TrC∼.C∼
”I3 = det C∼ for incompressible materials: I3 = 1
J = det F∼ I3 = J2
• The second Piola-Kirchhoff stress is then given by:
Π∼ =∂W∂E∼
= 2∂W∂C∼
• Mooney-Rivlin lawW = C1(I1 − 3) + C2(I2 − 3)
• Ogden
W (λ1, λ2, λ3) =NX
p=1
µp
αp
“λ
αp1 + λ
αp2 + λ
αp3 − 3
”

Constitutive equations : hypo-elasticity
• The constitutive equations are written in a rate form relating any objective stressrate to the deformation rate D∼:
T∼J ,
T∼,
T∼, · · · = Λ∼∼
: D∼
• These constitutive equations may be path dependent . . . not physical

Constitutive equations : F∼e.F∼
p decomposition
• One assume an elastic (F∼e) / plastic (F∼
p) transformation decomposition
F∼ = F∼e.F∼
p
• The decomposition defines an intermediate state :
• The deformation rate is given by:
L∼ = F∼.F∼−1 = F∼
e.F∼
e−1 + F∼e.F∼
p.F∼
p−1.F∼e−1 = L∼
e + F∼e.L∼
p.F∼e−1
• Express L∼p = D∼
p + W∼p

Examples
• Isotropic von Mises plasticity
D∼p =
32
pT∼′
T ′eqW∼
p = 0∼
• Crystal plasticity
D∼p =
Xs
γs (m s ⊗ n s + m s ⊗ n s) W∼p =
Xs
γs (m s ⊗ n s −m s ⊗ n s)
γs = γs(T∼ : (m s ⊗ n s))

Constitutive equations : corotational formulations
• Polar formulation• The constitutive equation is expressed between the rotated stress T∼R
= R∼.T∼.R∼T and
any stress measure constructed using U∼• The small strain formalism can be used for the constitutive equations• The corresponding objective stress stress rate is the Green-Naghdi rate.
• Rotate formulation• The constitutive equations are expressed using: T∼Q
= Q∼.T∼.Q∼T where Q∼ is obtained
integrating the following equation:Q∼ = W∼ .Q∼
• The corresponding strain tensor is:
ε∼Q=
ZtdD∼
• The constitutive equations then relate:
T∼Q= f (ε∼Q
) small strain formalism
• The corresponding objective stress stress rate is the Jaumann rate.

Outline

Finite element formulation: small strain
• Internal virtual power (one finite element):ZΩ
σ∼ : δε∼dΩ =
ZΩ
“BBBT
ε .σσσ”
.uuun dΩ ≡ FFF i .uuun
• Internal elementary force:
FFF i =
ZΩ
BBBTε .σσσ dΩ
• Elementary stiffness matrix
KKK e =
ZΩ
BBBTε .
∂σσσ
∂εεε.BBBε dΩ

Finite element formulation: total lagrangian
• Internal virtual power (one finite element):ZΩ0
Π∼ : δE∼ dΩ0 =
ZΩ0
ΠΠΠ.δEEE dΩ0 ≡ FFF i .uuun
• Transformation gradient
FFF = 111 + eee = 111 + BBBFX .uuun δFFF = BBBFX .δuuun
• Green-Lagrange strain:
E∼ =12
“F∼
T .F∼ − 1∼”
=12(e∼+ e∼
T ) +12
e∼T .e∼ = ε∼X +
12
e∼T .e∼ ⇒
δE∼ = δε∼X +12
δe∼T .e∼+
12
e∼T .δe∼
• Using Voigt notations
δEEE = δεεεX +12
MMML(e∼T ).δeee +
12
MMMR(e∼).δeeeT = δεεεX +12
MMML(e∼T ).δeee +
12
MMMR(e∼).TTT .δeee
δEEE = δεεεX +12
(111 + TTT ) .MMML(e∼T ).δeee =
„BBBεX +
12
(111 + TTT ) .MMML(e∼T ).BBBFX
«.δuuun ≡ BBBEX .δuuun
using MMMR (a∼).TTT = TTT .MMML(a∼T )

• The internal forces are then computed as:
FFF i =
ZΩ0
BBBTEX .ΠΠΠ dΩ0
• The elementary stiffness matrix is then computed as:
KKK e =∂FFF i
∂uuun
• The product BBBTEX .ΠΠΠ can be rewritten as:
BBBTEX .ΠΠΠ = BBBT
εX .ΠΠΠ +12
BBBTFX .MMML(e∼). (111 + TTT ) .ΠΠΠ Π∼ is symmetric
= BBBTεX .ΠΠΠ + BBBT
FX .MMML(e∼).ΠΠΠ
= BBBTεX .ΠΠΠ + BBBT
FX .MMMR(Π∼).eee
• So that
KKK e =
ZΩ0
„BBBT
EX .∂ΠΠΠ
∂EEE.BBBEX + BBBT
FX .MMMR(Π∼).BBBFX
«dΩ0

Finite element formulation: updated lagrangian
• Internal virtual power (one finite element):ZΩ
σ∼ : δε∼dΩ =
ZΩ
σσσ.δεεε dΩ ≡ FFF i .uuun
• The same method as before applies considering that σ∼ is the secondPiola-Kirchhoff stress at time t expressed in the reference frame at t (and not att0). In that case, one gets:
FFF i =
ZΩ
BBBεx .σσσ dΩ
and
KKK e =
ZΩ
„BBBT
εx .∂σσσ
∂εεε.BBBεx + BBBT
Fx .MMMR(σ∼).BBBFx
«dΩ