final presentation mk2
TRANSCRIPT

FLEXCRAFTMANIPULATOR
ArmStarBrett DykeAaron GouldChase WestSam ElliottChris Strong
Problem
Replacement for pressurized suits
Needs:
Functionality of human arm
Make repairs, collect samples, etc.
Performs in zero gravity environment

Solution
Robotic Arms
4 arms
2 for stability (anchors)
2 for functionality
Electronically controlled
Electric servos
1:1 control system
Responsibility is
Durability sturdiest frame
-extremely high movement forces
ease of wiring
capacity for upgrades.
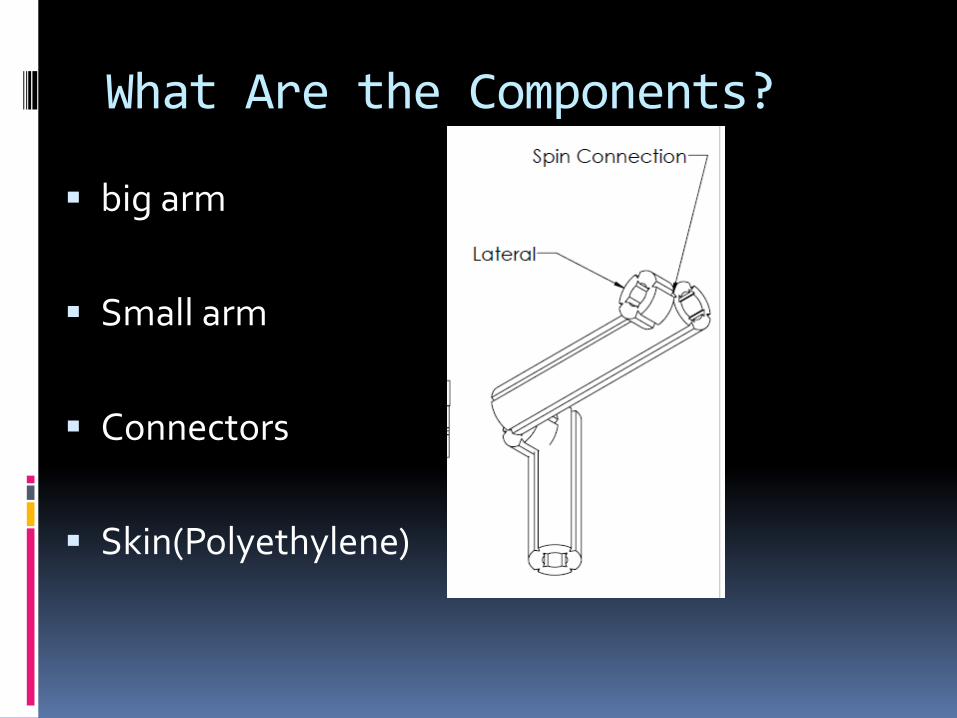
What Are the Components?
big arm
Small arm
Connectors
Skin(Polyethylene)
Joint Mobility Motors
A. Motor: BLDC 56 Series Model DBT566C31A
A. Torque: 3.77 kgf-cm
B. Rotational Speed: 2800 rpm
C. Power requirement: 24 volts DC
B. Gear Box: 5GB Series
A. Gear ratio: 1:100
B. Permissible Torque: 150 kgf-cm
C. Rotational Speed: 36 rpm
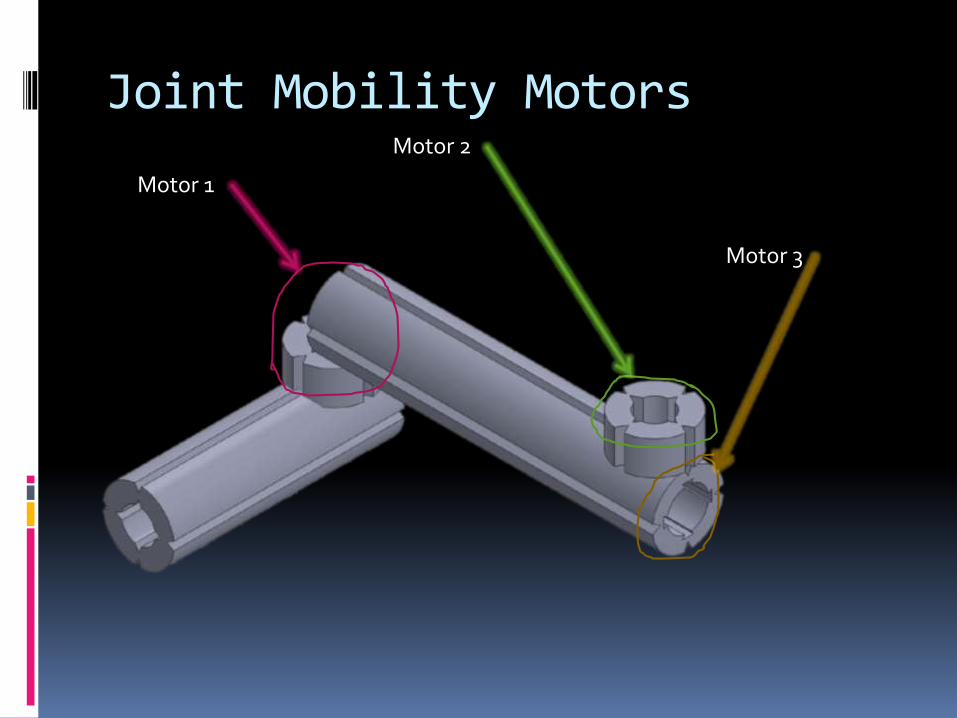
Motor 1
Motor 2
Motor 3
Joint Mobility Motors

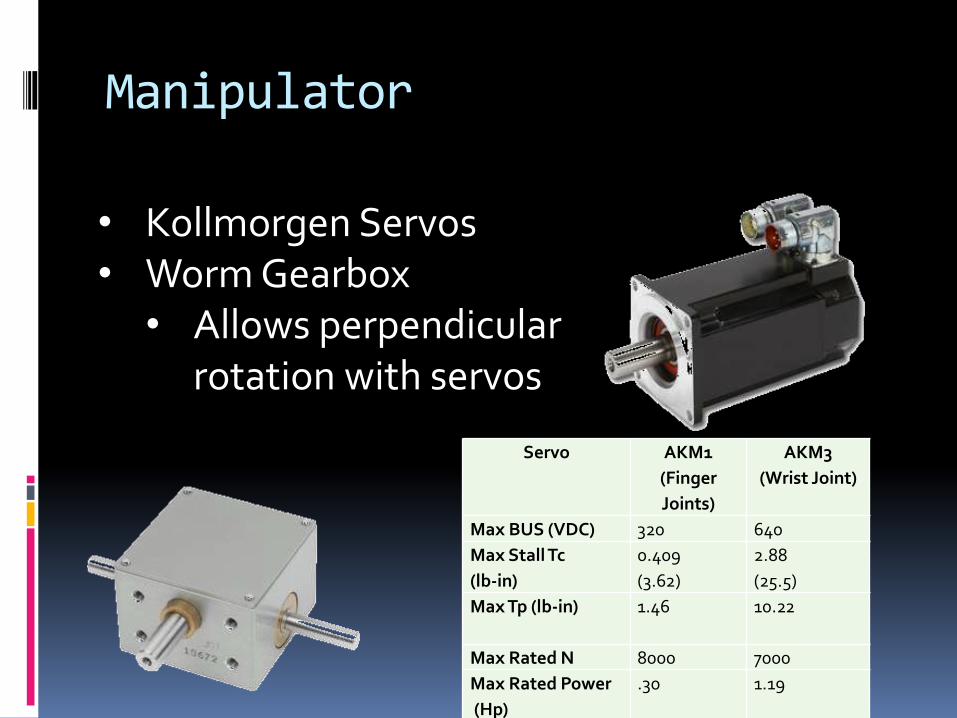
Manipulator
Simple Design
Aluminum Structure
AA 2024
Allows functionality similar to human hand
Manipulator
Servo AKM1
(Finger
Joints)
AKM3
(Wrist Joint)
Max BUS (VDC) 320 640
Max Stall Tc
(lb-in)
0.409
(3.62)
2.88
(25.5)
Max Tp (lb-in) 1.46 10.22
Max Rated N 8000 7000
Max Rated Power
(Hp)
.30 1.19
• Kollmorgen Servos• Worm Gearbox
• Allows perpendicular rotation with servos

Shielding
Needs
Protection from
Radiation
Ballistics such as micrometeorites
Strong
Lightweight
Inexpensive
Easy to form
Shielding
Polyethylene (plastic)
Chemical formula (C2H4)n
High hydrogen content protects from radiation
Fabric
Can bend easily in a thin sheet
Many layers formed together create a strong block
Easy to mold
Cheap ($0.59/lb)
Great as a ballistic shield
Shielding
• "Since it is a ballistic shield, it also deflects micrometeorites, since it's a fabric, it can be draped around molds and shaped into specific spacecraft components.” -Raj Kaul

Control System
Functions like human hand
Made out of molded plastic
Dimensions fully extended:
Length and height of the astronauts forearm
Has side to side range of semi-circle
There will be 2
Control System
Physical Components
Base
L Hooks
Potentiometers
Finger U’s
Non-Physical (Software)
ServoCommander
AnalogReader
Conclusion
meets requirements
Robotic arm
Paladium-Silver glass alloy structure
Polyethylene coating
1:1 functioning manipulator
Feedback