filters 1. introduction: what is filter? electronic circuits to remove unwanted frequency...
TRANSCRIPT
Filters
Workshop on Digital Signal and Image processing
Speaker: Dr. Rubaiyat Yasmin
25 May, 2012
Dept. of Information and Communication Engineering, R.U.
1
Introduction:
What is filter?Electronic circuits
To remove unwanted frequency components from the signal,
To enhance wanted ones.
Perform signal processing functions
Why needed?
2
Objective:
• Analog Filters• Digital Filters• Adaptive Filters
Basic understanding
3

Basic Types of Filters:
• Low-pass • High-pass• Band-pass • Band-reject
Four Main Filter Types:
4

Basic Types of Filters (Contd)
Pass band, H(f)=1
Stop band, H(f)=0
Cut-off frequency
5
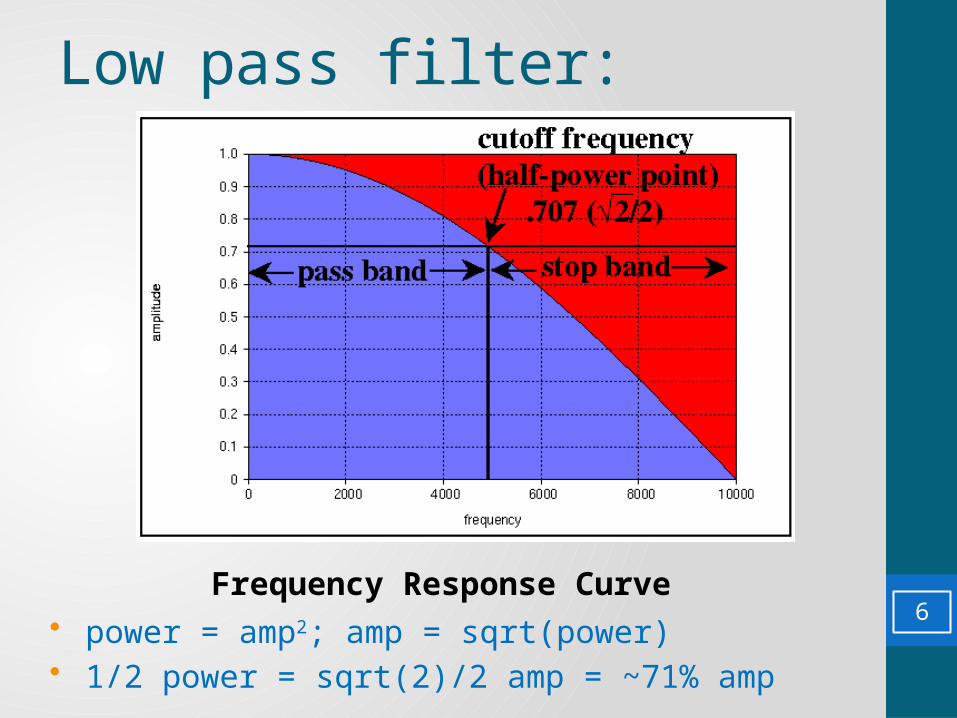
Low pass filter:
Frequency Response Curve• power = amp2; amp = sqrt(power)• 1/2 power = sqrt(2)/2 amp = ~71% amp
6
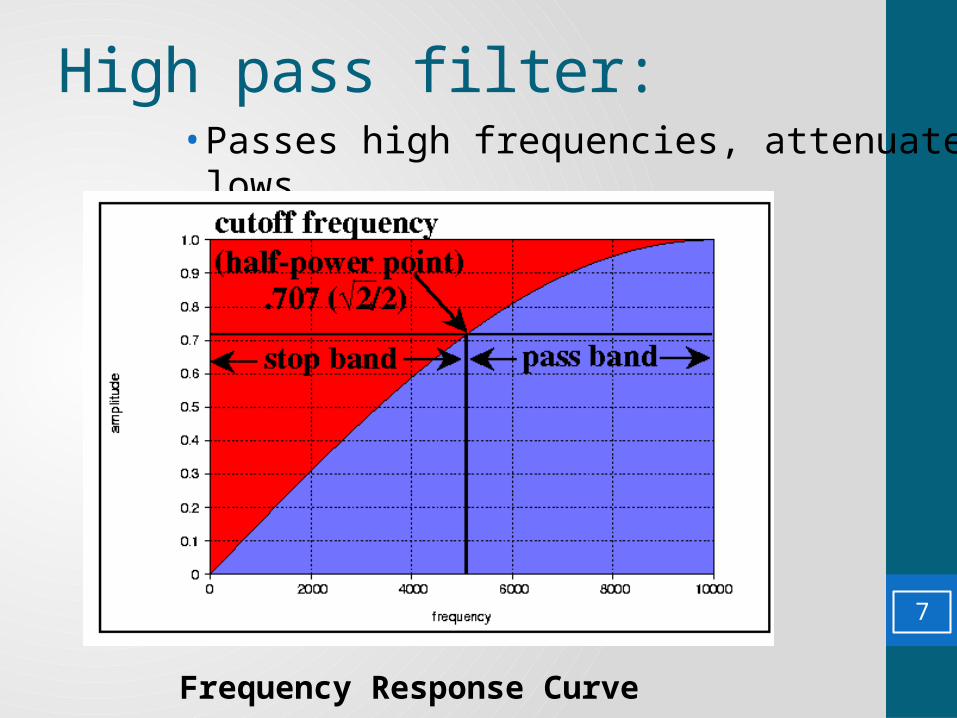
High pass filter:• Passes high frequencies, attenuates lows.
Frequency Response Curve
7
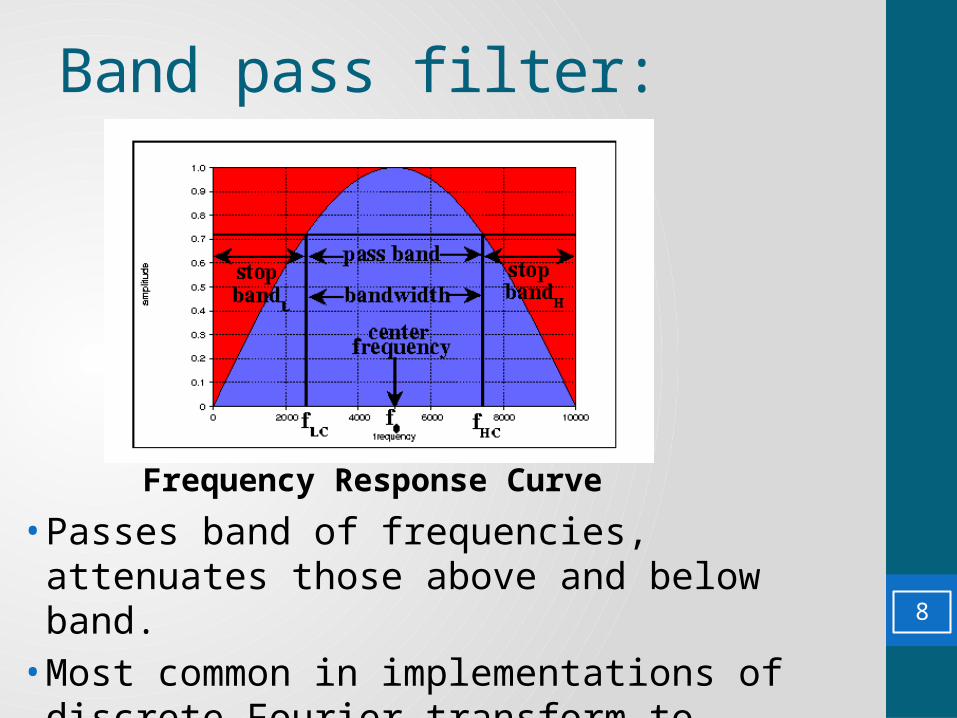
Band pass filter:
• Passes band of frequencies, attenuates those above and below band.
• Most common in implementations of discrete Fourier transform to separate out harmonics.
Frequency Response Curve
8

Band reject filter:• Stops band of frequencies, passes those above and
below band.• Most common in removing electric hum (50 Hertz A/C).
Frequency Response Curve
9

Analogue designs
• Exist for all the standard filter types (lowpass, highpass, bandpass, bandreject).
To define a standard lowpass filter, and To use standard analogue-analogue transformations from lowpass to the other types, prior to performing the bilinear transform.
Butterworth Chebyshev Elliptic
Common Approach :
Important families:
• Frequencies are specified in the Ω domain (in rad/s))
10
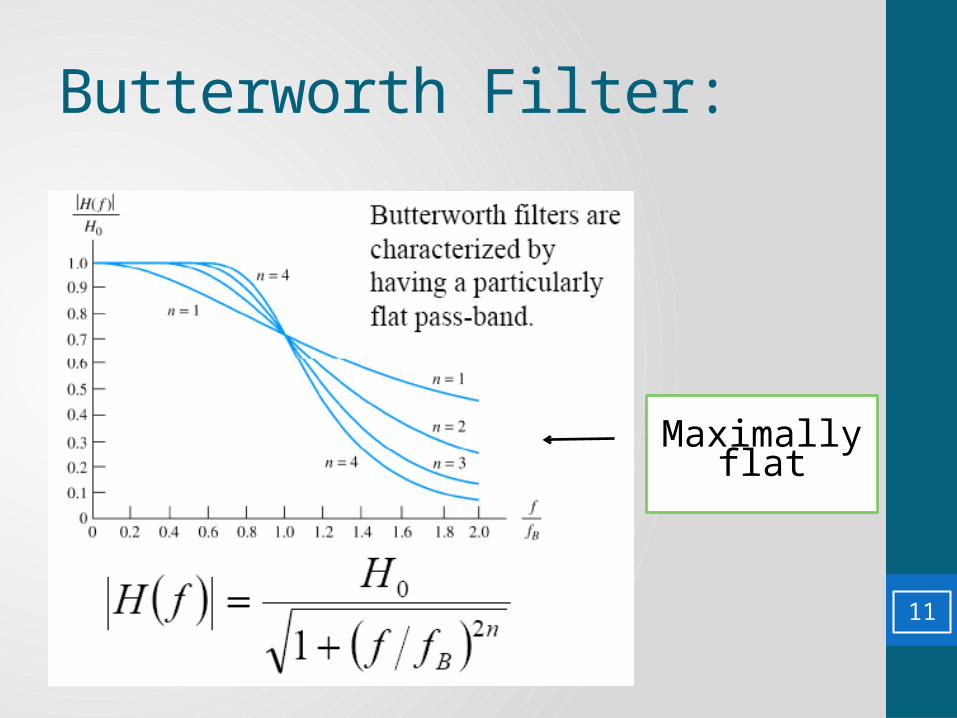
Butterworth Filter:
Maximally flat
11

Chebyshev Filter: Equiripple response in pass-band (up to ωc),
Monotonically decreasing in stop-band
12

Elliptic Filter: Equiripple in both pass-band and stop-band
13
Other Types of Analogue Filter Bessel filters, which are almost linear phase.
• Involve different degrees of flexibility and trade-offs in specifying transition bandwidth, ripple amplitude in pass-band/stop-band and phase linearity.
For a given band edge frequency, ripple specification, and filter order, narrower transition bandwidth can be traded off against worse phase linearity
14
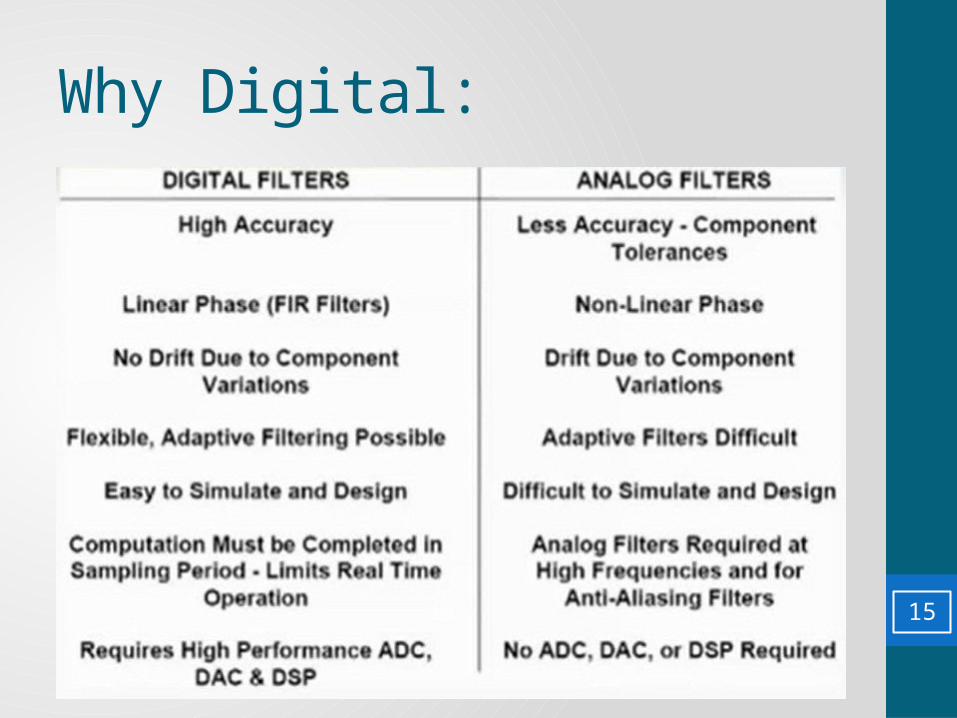
Why Digital:
15

16

Basic concept :
17

What is a Digital Filter?Digital Filter: Numerical procedure or algorithm that transforms a given sequence of numbers into a second sequence that has some more desirable properties.
Input sequencexn Digital Filter
Output sequenceyn
18

Desired features
Depend on the application, for example
Input Signal
generated by sensingdevice (microphone)
speech
Output
having less noise orinterferences
with reducedredundancy for moreefficient transmission 19

Examples of filtering operationsNoise suppression:
• received radio signals
• signals received by image sensors (TV,infrared imaging devices)
• electrical signals measured from humanbody (brain heart, neurological signals)
• signals recorded on analog media suchas analog magnetic tapes
20

Enhancement of selected frequency ranges:
• treble and bass control or graphic equalizers
increase sound level and high and low level frequenciesto compensate for the lower sensitivity of the ear
• enhancement of edges in imagesimprove recognition of object (by human or computer)
21

Specific operations:
• differentiation• integration• Hilbert transform
These operations can beapproximated by digital filtersoperating on the sampled inputsignal
22

The Basic of Digital FiltersFilters work by using one or both of the following methods:– Delay a copy of the input signal (by x number of
samples), and combine the delayed input signal with the new input signal.• (Finite Impulse Response, FIR, or feedforward
filter)– Delay a copy of the output signal (by x number of
samples), and combine it with the new input signal.• (Infinite Impulse Response, IIR, feedback filter)
FIR Filters IIR Filters
23

FIR FiltersFIR filter of length M (order N=M-1, order - number of delays)
The Order of the filter is equal to the number of samples you look back
24

25

The impulse response is of finite length M
FIR filters have only zeros (no poles), henceknown also as all-zero filters
FIR filters also known as feedforward ornon-recursive, or transversal
Now N-point DFT (Y(k)) and then N-point IDFT (y(n)) can be usedto compute standard convolution product and thus to performlinear filtering (given how efficient FFT is)
Frequency-domain Equivalent:
26
FIR Design Methods
• Impulse response truncation the simplest design method, has undesirable frequency domain-characteristics, not very useful
• Windowing design method simple and convenient but not optimal, i.e. order achieved is not minimum possible
• Optimal filter design methods 27

Approximated filters obtained by truncation
28

FIR Filter Design
Consider the Window method:• Determine ideal response function• If length of ideal function is too long, multiply
ideal response by a finite length window function
• Note that multiplication by window in time domain means convolution (and smearing) in the frequency domain
29
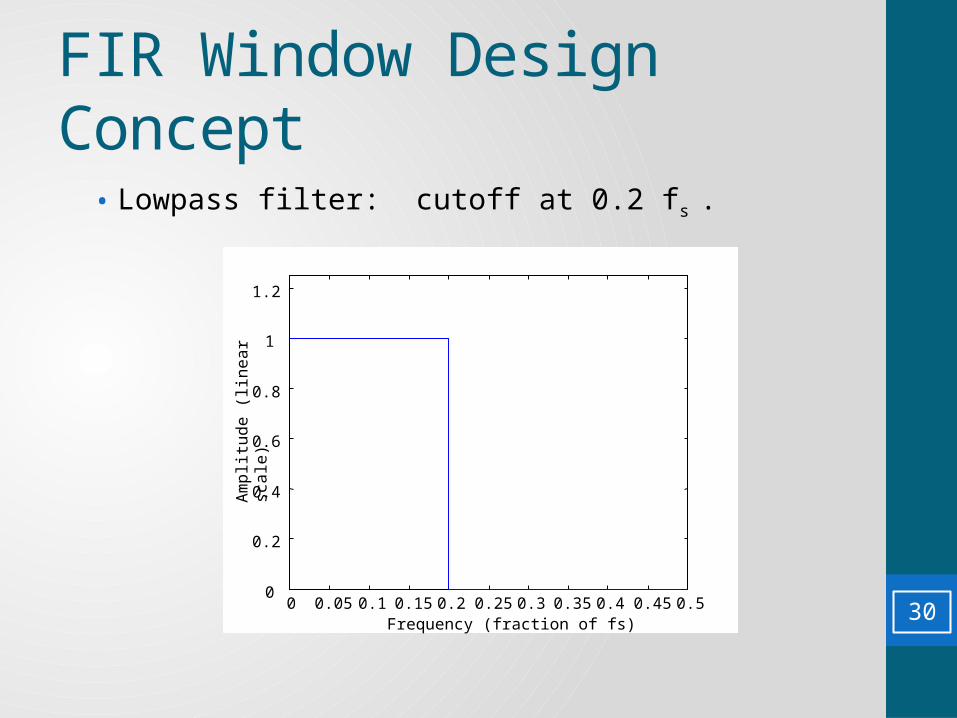
FIR Window Design Concept
• Lowpass filter: cutoff at 0.2 fs .
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.50
0.2
0.4
0.6
0.8
1
1.2
Frequency (fraction of fs)
Am
plit
ud
e (
line
ar
sca
le)
30

FIR Design Concept (cont.)
• Time domain response (Inverse DTFT)
-60 -40 -20 0 20 40 60-0.1
-0.05
0
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
Sample Index
Am
plitu
de
31
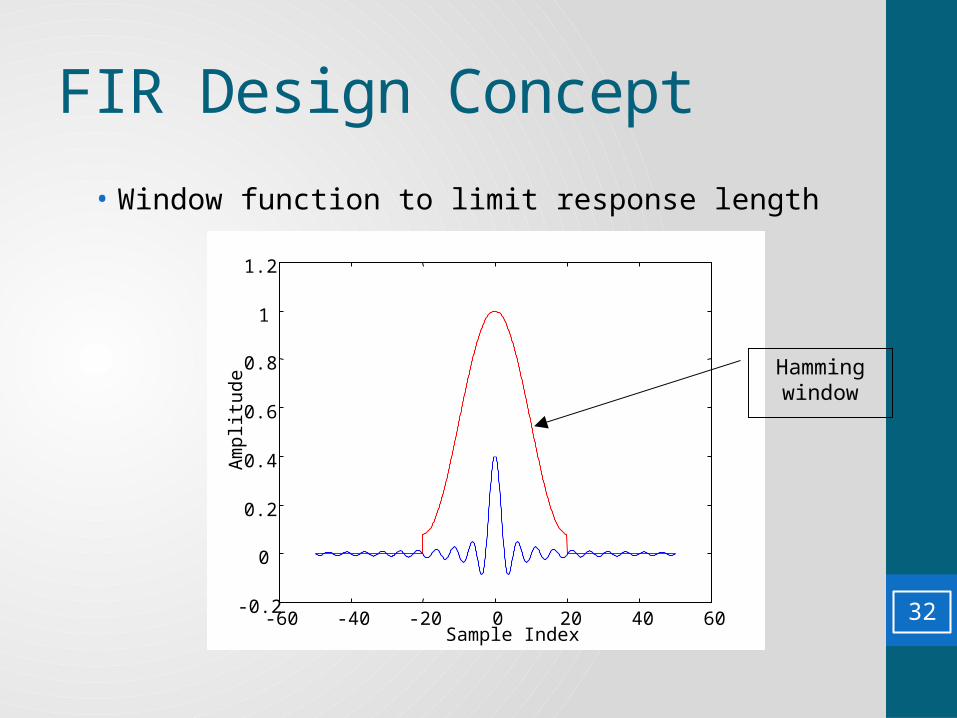
FIR Design Concept
• Window function to limit response length
-60 -40 -20 0 20 40 60-0.2
0
0.2
0.4
0.6
0.8
1
1.2
Sample Index
Am
plitu
de
Hamming window
32

FIR Design Concept (cont.)
• Windowed and shifted (causal) result
0 5 10 15 20 25 30 35 40-0.1
-0.05
0
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
Am
plitu
de
Sample Index33

FIR Design Concept
• Resulting frequency response of filter
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5-60
-50
-40
-30
-20
-10
0
10
Frequency (fraction of fs)
Mag
nitu
de (
dB)
34

Window Design Method
Rectangular Window Frequency Response
35

Truncated Filter
Increasing the dimension of the window M: The width of the main lobe decreases The area under side lobes remain constant
36
Solution to Sharp Discontinuity of Rectangular Window
Use windows with no abrupt discontinuity in their time-domain response and consequentlylow side-lobes in their frequency response.
In this case, the reduced ripple comes at the expenseof a wider transition region
However, this can be compensated for by increasingthe length of the filter.
37

Alternative Windows -Time Domain
• Hanning • Hamming • Blackman
Window Characteristics:
A wider transition region (wider main-lobe) is compensated by much lower side-lobes and thus less ripples.
38
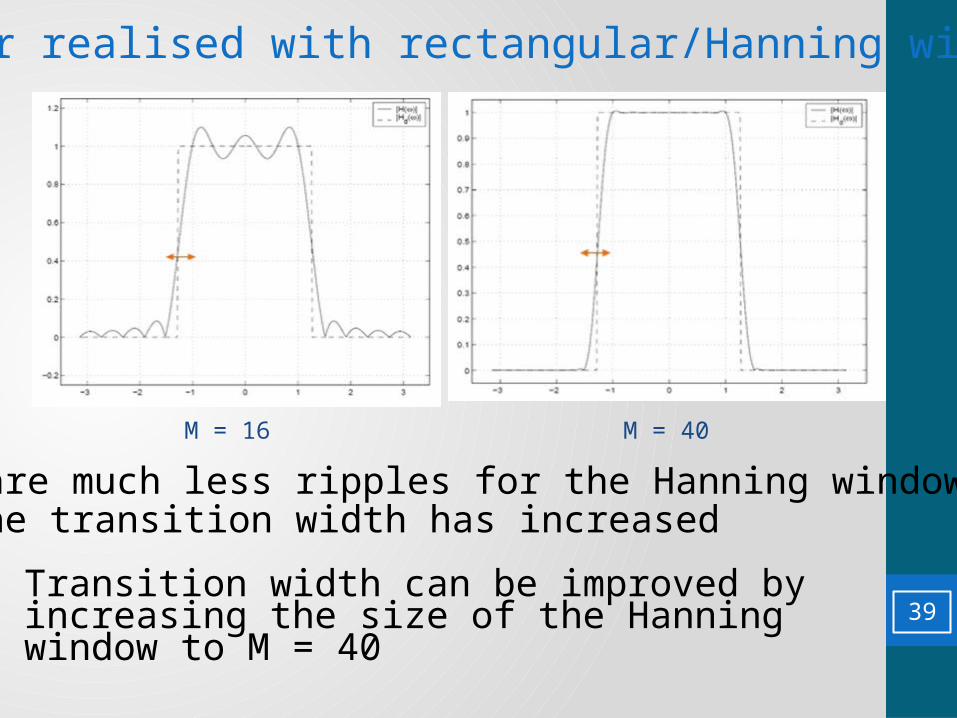
Filter realised with rectangular/Hanning window
There are much less ripples for the Hanning window butthat the transition width has increased
Transition width can be improved by increasing the size of the Hanning window to M = 40
M = 40M = 16
39
Windows characteristics
• Fundamental trade-off between main-lobewidth and side-lobe amplitude
• As window smoother, peak side-lobedecreases, but the main-lobe width increases.
• Need to increase window length to achievesame transition bandwidth.
Specification necessary for Window Design Method40

Window Design Procedure
• Ideal frequency response has infinite impulse response
• To be implemented in practice it has to be- truncated
- shifted to the right (to make is causal)
• Truncation is just pre-multiplication by a rectangular window
- the filter of a large order has a narrow transition band
- however, sharp discontinuity results in side-lobeinterference independent of the filter’s order andshape Gibbs phenomenon
• Windows with no abrupt discontinuity can be used to reduceGibbs oscillations (e.g. Hanning, Hamming, Blackman)
41
Windowed FIR filter design procedure
1. Select a suitable window function
2. Specify an ideal response Hd(ω)
3. Compute the coefficients of the ideal filter hd(n)
4. Multiply the ideal coefficients by the window function togive the filter coefficients
5. Evaluate the frequency response of the resulting filterand iterate if necessary (typically, it means increase M ifthe constraints you have been given have not been
satisfied)
42

FIR Filter Design Using Windows
FIR filter design based on windows is simple and robust,however, it is not optimal:
• The resulting pass-band and stop-band parametersare equal even though often the specification is morestrict in the stop band than in the pass band
unnecessary high accuracy in the pass band
• The ripple of the window is not uniform (decays as wemove away from discontinuity points according toside-lobe pattern of the window)
by allowing more freedom in the ripple behaviourwe may be able to reduce filter’s order and henceits complexity
FIR Design by Optimisation Least-Square Method
43
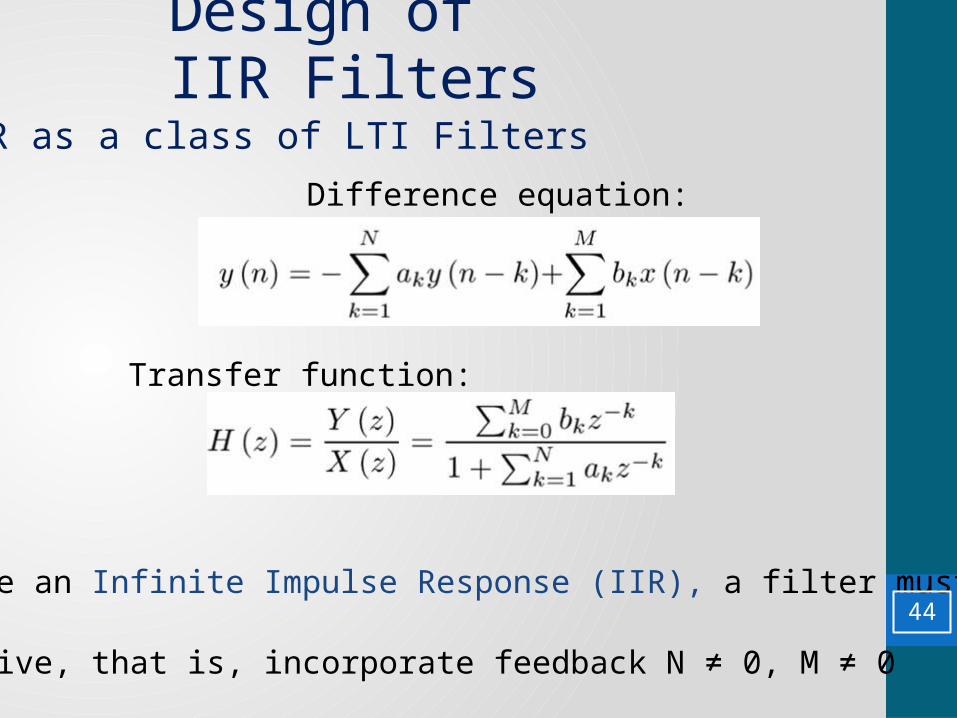
IIR as a class of LTI Filters
Difference equation:
Transfer function:
To give an Infinite Impulse Response (IIR), a filter must berecursive, that is, incorporate feedback N ≠ 0, M ≠ 0
Design of IIR Filters
44

IIR Filters Design from an Analogue Prototype
Almost all methods rely on converting an analogue filter to a digital one
Analogue to Digital Conversion:
AnalogueDigital
45
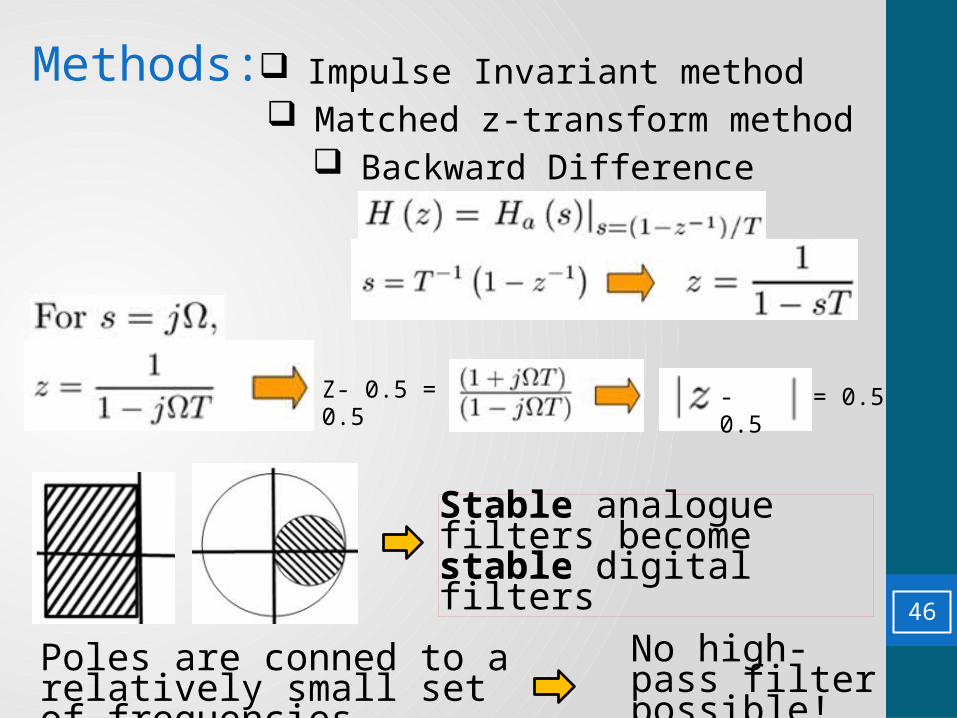
Methods: Impulse Invariant method Matched z-transform method Backward Difference Method
Z- 0.5 = 0.5 = 0.5- 0.5
Stable analogue filters become stable digital filters
Poles are conned to a relatively small set of frequencies
No high-pass filter possible!
46
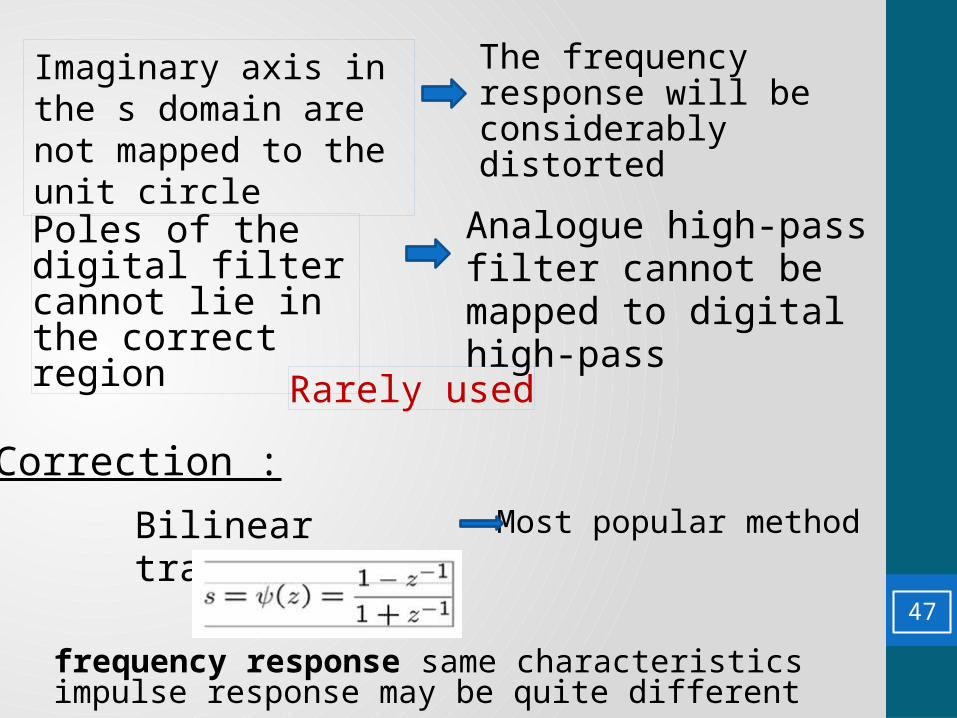
The frequency response will be considerably distorted
Analogue high-pass filter cannot be mapped to digital high-pass
Poles of the digital filter cannot lie in the correct region
Rarely used
Imaginary axis in the s domain are not mapped to the unit circle
Correction :
Bilinear transform Most popular method
frequency response same characteristicsimpulse response may be quite different
47

Two important cases:
1. With σ=0 Imaginary (frequency) axis in the s-plane maps to the unit circle in the z-plane
2. With σ <0, Left half s-plane maps onto the interior of the unit circle
Properties of the Bilinear Transform
Suitable frequency response, stability for digital filter
s-plane z-plane
48
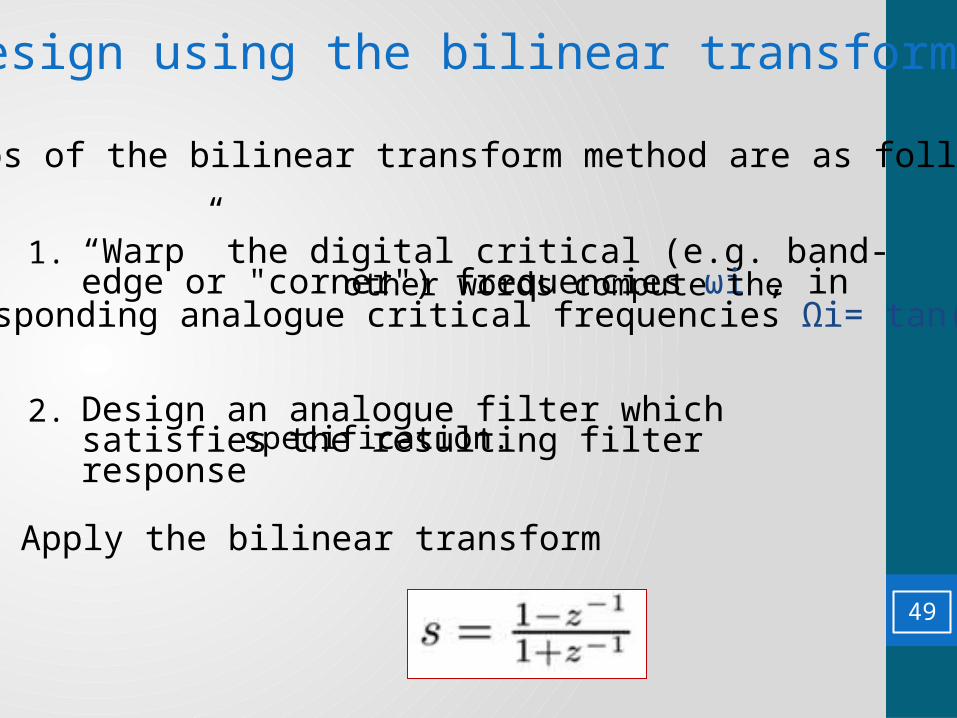
Design using the bilinear transform
The steps of the bilinear transform method are as follows:
1. “Warp” the digital critical (e.g. band-edge or "corner") frequencies ωi , in other words compute thecorresponding analogue critical frequencies Ωi= tan(ωi/2).
2. Design an analogue filter which satisfies the resulting filter response specification.
3. Apply the bilinear transform
49
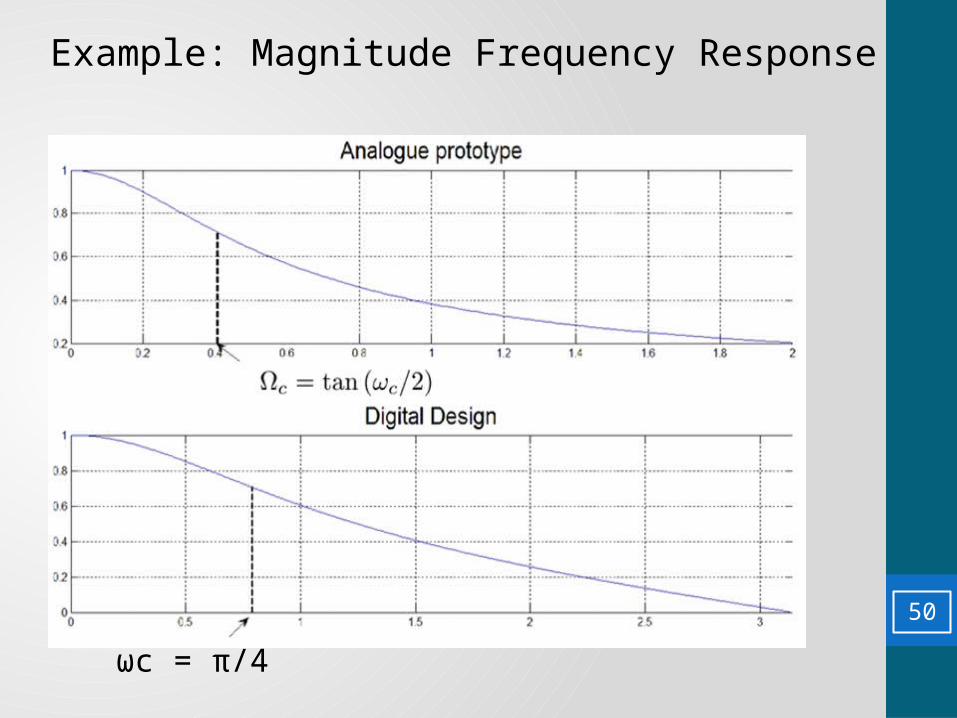
Example: Magnitude Frequency Response
ωc = π/4
50

Designing high-pass, band-pass and band-stop filters
• Various techniques available to transform a low-pass filter into a high-pass/band pass/band-stop filters.
Frequency transformation in the analogue domain
• Concentrated on IIR filters with low-passcharacteristics.
51
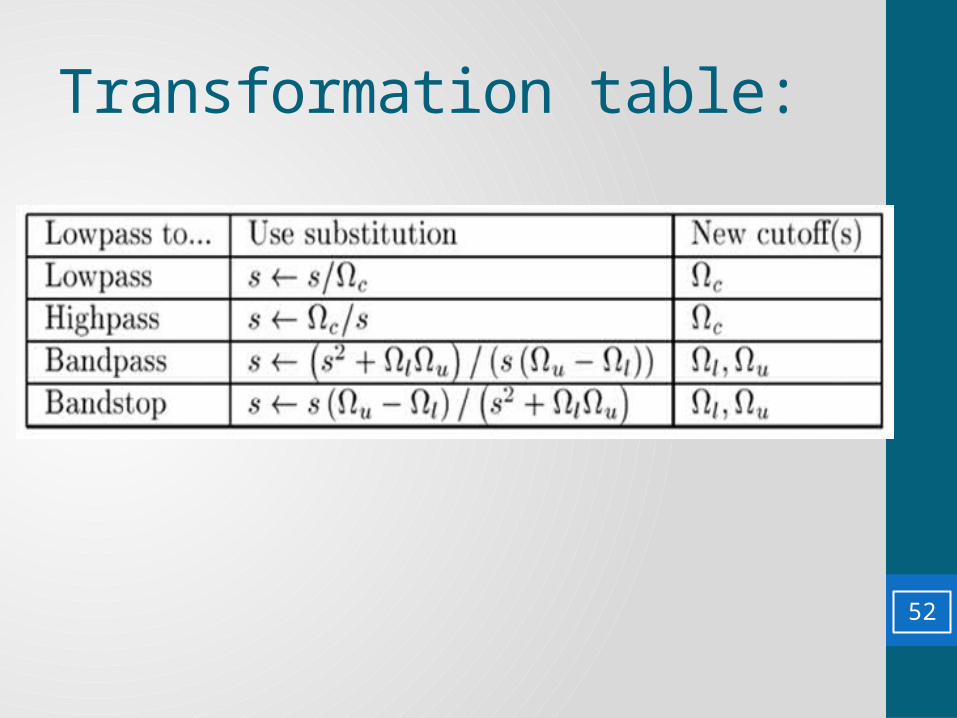
Transformation table:
52

Adaptive Digital Filters Top
9.6
• Adaptive digital filters are self learning filters, whereby an FIR (or IIR) is designed based on the characteristics of input signals. No other frequency response information or specification information is available.
• An adaptive digital filter is often represented by a signal flow graph with adaptive nature of weights shown:
x(k)Input
w0
x(k-1) x(k-2)
w1 w 2
AdaptiveWeights
d(k)
- +y(k)
Outpute(k)
Error
August 2007, Version 3.8/21/07 For Academic Use Only. All Rights Reserved
53

Adaptive Signal Processing: Top
9.7
“The aim is to adapt the digital filter such that the input signal x(k) is filtered to produce y(k) which when subtracted from desired signal d(k), will minimise the power of the error signal e(k).”
desiredsignal d(k)
input +y(k)signal
x(k)
Adaptive FIRDigital Filter Output-
signal
Adaptive Algorithm
e(k) = d(k) - y(k)
y(k) = Filter(x(k))
e(k)Σ
errorsignal
August 2007, Version 3.8/21/07 For Academic Use Only. All Rights Reserved
54
Adaptive Filter Nomenclature
• If the digital filter is FIR or all-zero, the adaptive system can also be called Moving Average or MA.
• If the digital filter is all-pole, the adaptive system can also be called Autoregressive or AR.
• If the digital filter is an IIR with zeros, the adaptive system can also be called ARMA.
• This presentation addresses FIR or MA filters only.
55
Coefficient Adaptation
• The principal behind determining the coefficients of the filter model is to maximize the statistical correlation between the desired signal and the coefficients.
• Typically, this is done by minimizing the correlation between the error signal and the filter state as is relevant to the coefficients.
• If the adaptive filter is working, the error signal decreases in magnitude, which slows down the movement of the coefficients. The filter is therefore converging to a solution. 56

Applications of Adaptive FiltersSystem identification: adaptive equalization
• The adaptive filter attempts to model an unknown external system.
Interference cancellation• The adaptive filter attempts to isolate the
component of a primary signal that is not part of a reference signal.
Linear prediction• This is like interference cancellation, but the
adaptive filter uses a delayed version of the primary signal as the reference.
57

Architectures
Delays(k) + n)k)
d(k)
Unknown x(k)
d(k)
y(k) +e(k)
Top
9.9
n’(k)x(k) Adaptive
Filter
y(k) +e(k)Σ s(k)-
Adaptive ΣSystem Filter -
Noise Cancellation
UnknownSystem
d(k)+
Inverse System Identification
d(k)
x(k) y(k) +e(k)x(k) AdaptiveFilter
y(k)Σ
-e(k) Delay
s(k)Adaptive Σ
Filter -
PredictionSystem Identification
August 2007, Version 3.8/21/07 For Academic Use Only. All Rights Reserved
58

Application Examples
• System Identification:
• Channel identification; Echo Cancellation
• Inverse System Identification:
• Digital communications equalisation.
• Noise Cancellation:
Top
9.10
• Active Noise Cancellation; Interference cancellation for CDMA
• Prediction:
• Periodic noise suppression; Periodic signal extraction;Speech coders; CMDA interference suppression.
August 2007, Version 3.8/21/07 For Academic Use Only. All Rights Reserved
59

Least-Mean-Square (LMS) Algorithm Linear adaptive filtering algorithm Differs from steepest descent Widely used for its simplicity
Consists of:1) A filtering process
(mainly FIR model)2) An adaptive process
60

Parameters: M = # of taps (length of filter) μ = step-size parameter
Filter output is: y(n) = ŵH(n)u(n)
Error signal is: e(n) = d(n) – y(n)
Tap-weight vector: ŵ(n+1) = ŵ(n) + μu(n)e*(n)
61

1. Let n=1
2. Compute the gain vector
3. Compute the true estimation error (n)
4. Update the estimate of the coefficient vector
5. Update the error correlation matrix
6. Increment n by 1, go back to step 2
ŵ(n) = ŵ(n-1) + k(n) (n)
p(n)= p(n-1)-k(n)uT(n)p(n-1)
k(n)= p(n-1)u(n)/1+uT(n) p(n-1)u(n)
Convergence is better but computationally expensive
The Recursive Least-Squares (RLS) Algorithm
62

Thank You
63