faculty of electrical engineering technion – israel institute of technology
DESCRIPTION
CONTROL AND ROBOTICS LABORATORY. Faculty of Electrical Engineering Technion – Israel Institute of Technology. Interceptor and target route update. Liraz A mar Hagay Abramovsky. Project supervisers : Eliran Abutbul Sharon Rabinovich. Presentation Layout. Project definition. - PowerPoint PPT PresentationTRANSCRIPT

Faculty of Electrical EngineeringTechnion – Israel Institute of Technology
Liraz AmarHagay Abramovsky
CONTROL AND ROBOTICS LABORATORY
Interceptor
and target route
update
Project supervisers:Eliran AbutbulSharon Rabinovich
2Presentation Layout
Project definition
Problem constraints
Way of calculating forces
Solving motion equations
Forces equation
Examples of simulations for different initial conditions
Possible solution directions
References

Faculty of Electrical EngineeringTechnion – Israel Institute of TechnologyProject definition
3
Developing an algorithm for updating the course of the Interceptor in the air due to changes in predictable trajectory of the interceptor or target.
Faculty of Electrical EngineeringTechnion – Israel Institute of Technology
Problem definition Given interception scenario of interceptor and
target. After launching , if update has received for the target / interceptor that caused changes in the predictable trajectory . we should find a way to update the interceptor trajectory to the new hit point.
The optimal hit will be only with these Certain conditions :*hit in a given space of time.*Minimum time interception.*Maximum hit speed. (energy)
4
Faculty of Electrical EngineeringTechnion – Israel Institute of Technology
Problem Constraints
5
Flight Ceil Height- this is an aerodynamic Restriction that affects maneuverability.
Minimum close velocity- Minimum Relative hit speed of one missile in the other in order to “hit to kill”.
Aspect Azimuth- the interceptor should hit the target in a limited Azimuth in order to damage the target.

Faculty of Electrical EngineeringTechnion – Israel Institute of Technology
7
F is the force vector of drag is the density of the air
v is the velocity of the missile relative to the air
allistic coefficient
D
D
Ais the referenceareaC is thedrag coefficientis ab
1 | |2 DF A C v v
1 | | 12 | |2D
DD
D A Cm
F ma
A C v vFa v vm m
Drag Force

Faculty of Electrical EngineeringTechnion – Israel Institute of Technology
8
Gravitation, or gravity, is a natural phenomenon in which objects with mass attract one another .
In everyday life, gravitation is most familiar as the agent that gives weight to objects with mass and causes them to fall to the ground when dropped.
Gravitation g

Faculty of Electrical EngineeringTechnion – Israel Institute of Technology
Forces Equation
9
1 | |2x xa v v
1 | |2z za g v v
1 | |2y ya v v
z
y
x
Now, if we multiply the acceleration with m we will get the forces

Faculty of Electrical EngineeringTechnion – Israel Institute of Technology
Drag force calculation
10
[T, a, P, ]=atmosisa(H0); T temperature in kelvina speed of soundP air pressures
- air densities
At first:
Atmosisa- implements the mathematical representation of the International Standard Atmosphere values for ambient temperature, pressure, density, and speed of sound for the input altitude.

Faculty of Electrical EngineeringTechnion – Israel Institute of Technology
11
[T, a, P, ]=atmosisa(H0); T temperature in kelvina speed of soundP air pressures
- air densities
Explanation about calculating atmosisa:
0( )6.5
1000h mT T
Therefore, the temperature is calculated with :
Temperature modeling:
Faculty of Electrical EngineeringTechnion – Israel Institute of Technology
12
00 0
5.25610
0
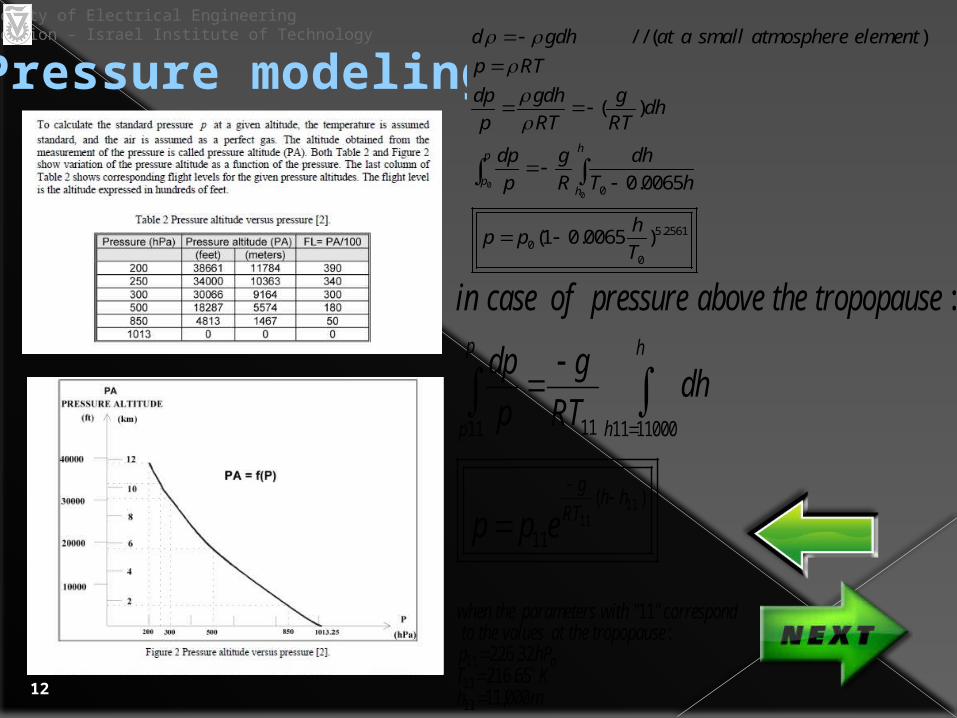
/ / ( )
( )
0.0065
(1 0.0065 )
hp
ph
d gdh at a small atmosphere elementp RTdp gdh g dhp RT RT
dp g dhp R T h
hp pT
1111
111111
1111 11 11000
( )
11
"11":
226.32216.6511,000
:
a
p h
p h
g h hRT
when the parameters with correspondto the values at the tropopausep hPT Kh m
in case of pressure above the tropopause
dp g dhp RT
p p e
Pressure modeling

Faculty of Electrical EngineeringTechnion – Israel Institute of Technology
13
Pressure modeling
pRT
Since the pressure and standard temperature are known for a given altitude ,the standard density can easily be calculated from the perfect gas equation
R= real gas constant for air 287.04
2
2secm
k

Faculty of Electrical EngineeringTechnion – Israel Institute of Technology
14
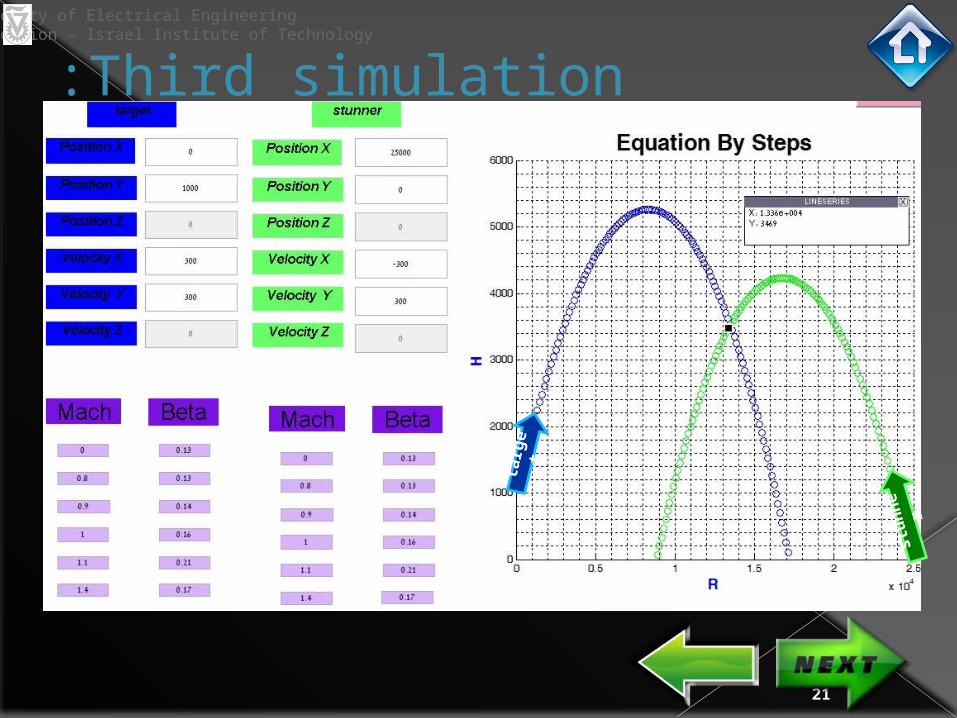
V velocityMacha speed of sound
Mach0.13 00.13 0.80.14 0.90.16 10.21 1.10.17 1.4
The Interpolation table we use in order to find the appropriate beta:
After those steps we have all the arguments we need to find the drag acceleration
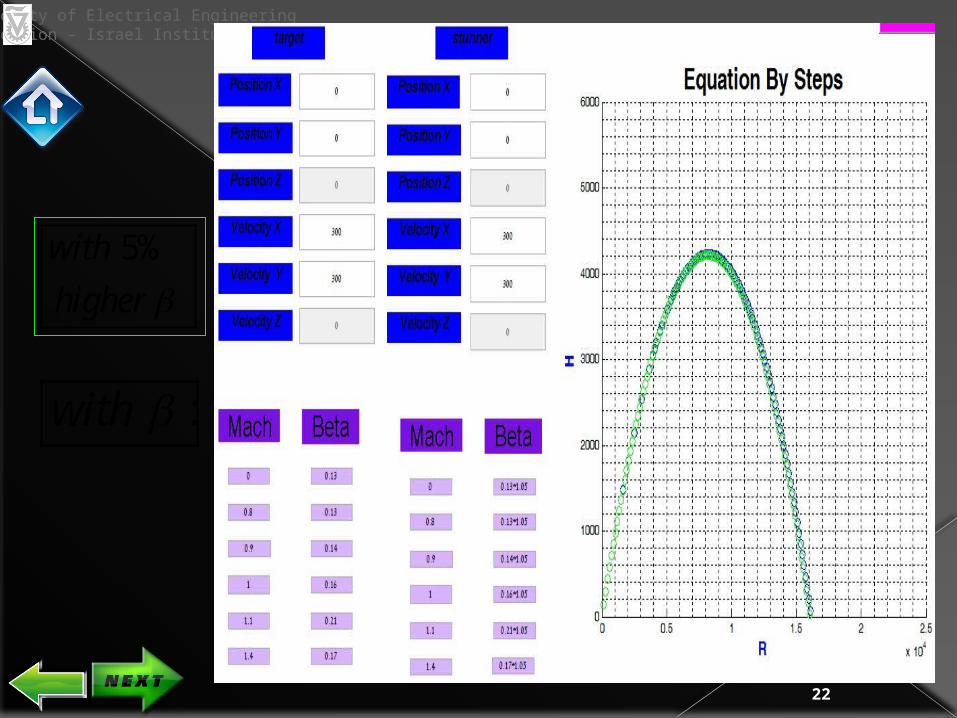
Missiles with the same ballistic parameter ( beta )will have the same flight trajectory
DC
Faculty of Electrical EngineeringTechnion – Israel Institute of Technology
Solving motion equations
15
For the velocity we use runge kutta 4-5 method:
1
2 1
3 2
4 3
i 1 i
1
( , )
( , )1 1( , )2 21 1( , )2 2
( , )1v v k1 2k2 2k3 k46
i i
i i
i i
i i
i i
dvf t v adt
k f t v
k f t t v k t
k f t t v k t
k f t t v k t
t
t t t
numerical analysis, the Runge–Kutta methods are an important family of implicit and explicit iterative methods for the approximation of solutions ordinary differential equations

Faculty of Electrical EngineeringTechnion – Israel Institute of Technology
For the location equation we also used the Runge–Kutta method:
16
1
2 1
3 2
4 3
i 1 i
1
( , ) ( )
( , )1 1( , )2 21 1( , )2 2
( , )1x x k1 2k2 2k3 k46
i i
i i
i i
i i
i i
dx f t x v tdtk f t x
k f t t x k t
k f t t x k t
k f t t x k t
t
t t t

Faculty of Electrical EngineeringTechnion – Israel Institute of Technology
17
With the atmospheric model
Without the atmospheric model
R=8378mH=4231m
R=8176mH=4192m
i=85X=11,62
7Y=3342
i=85X=12,17
0Y=3208

Faculty of Electrical EngineeringTechnion – Israel Institute of Technology
18
Atmosisa- implements the mathematical representation of the International Standard Atmosphere values for ambient temperature, pressure, density, and speed of sound for the input geopotential altitude.The Atmosisa return the air density , we already know that as we go higher the air density become thinner .
From the graphs , we can see that in high velocity the affect of the Atmosisa is low. But on the other hand, for the low velocity there is a major different in ‘x.’
We assume that the different in the low velocity is because Thin air density allows the missile to go further in the ’x’ axisdue to Low resistance.
[T, a, P, ]=atmosisa(H0);
Explanation to the graphs:

Faculty of Electrical EngineeringTechnion – Israel Institute of Technology
19
Examples of simulations for different initial conditions
stun
ne r
targ
et

Faculty of Electrical EngineeringTechnion – Israel Institute of Technology
Second simulation:
20
stun
ne r
targ
et
Faculty of Electrical EngineeringTechnion – Israel Institute of Technology
Third simulation:
21
stun
ne r
targ
et
Faculty of Electrical EngineeringTechnion – Israel Institute of Technology
22
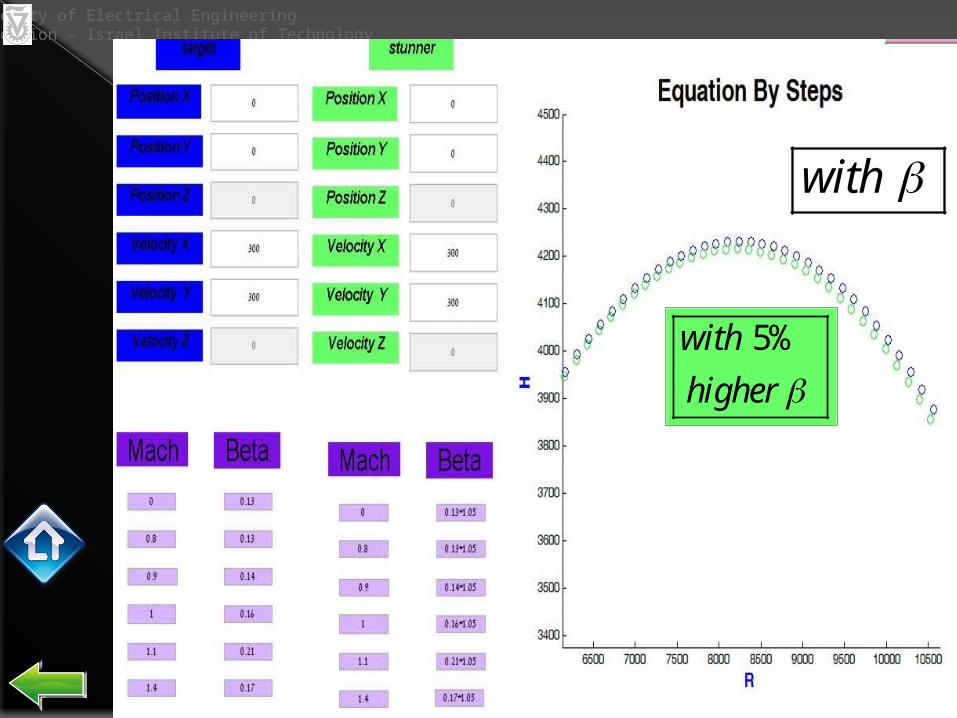
5%withhigher
:with
Faculty of Electrical EngineeringTechnion – Israel Institute of Technology
23
5%withhigher
with

Faculty of Electrical EngineeringTechnion – Israel Institute of Technology
Cost function Minimum time until hit -t Maximum relative velocity on hit time |vstunner-vtarget| Maximum stunner velocity on hit time- maximum hit speed of the
stunner. Vhit _stunner
24
Cost =alpha*t+beta*|vstunner-vtarget|+gama*vhit_stunner
Alpha, beta, gama are normalized factors that we decided on according to the importance of the Relevant Multiply .
Each point has its own cost calculated by the cost function. Point with the highest cost is the better hit point
this function helps us to decide which of the hit points is the best choice
Faculty of Electrical EngineeringTechnion – Israel Institute of Technology
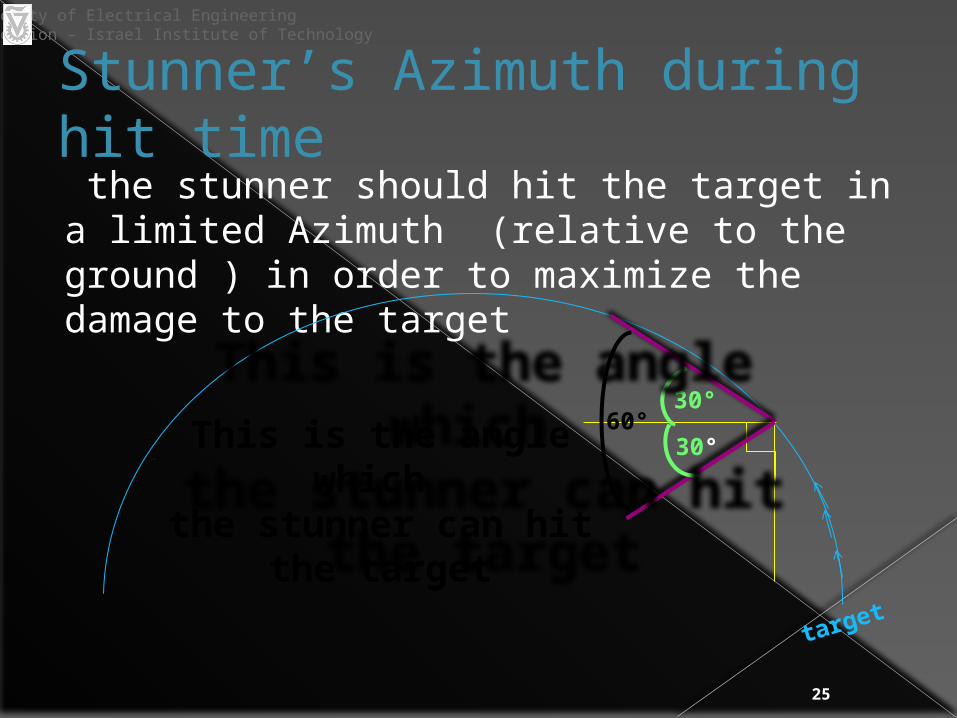
Stunner’s Azimuth during hit time the stunner should hit the target in a limited Azimuth (relative to the ground ) in order to maximize the damage to the target
25
30°
30°60°This is the angle which
the stunner can hit the target
target

Faculty of Electrical EngineeringTechnion – Israel Institute of Technology
Possible solution directions
26
A way to find Intercept Algorithm is to• look at the moment that the target
change azimuth.• Calculate the new route of the target.For the stunner we run on theta from the current theta to zero with delta of 0.1 secfor every theta we calculate the best hitting point using the algorithm called “desert lion ”

Faculty of Electrical EngineeringTechnion – Israel Institute of Technology
Desert lion algorithm
27
We choose one spot on the middle of the stunner’s course, check the previews and the next with the chosen theta and for a specific time we calculate the distance from the target. In addition, We also calculate for point[time+delta] and for point[time – delta].if the next point distance is shorter then the previews point.we keep searching for the minimum distance [time , max time ],Else we keep searching for the minimum distance [min time , time]
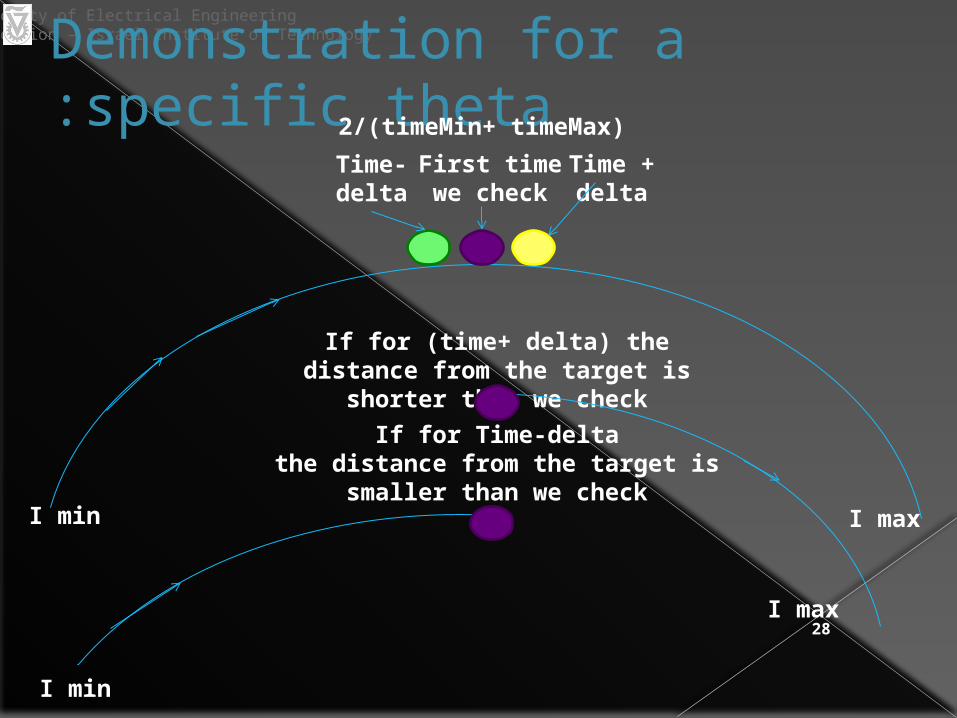
Faculty of Electrical EngineeringTechnion – Israel Institute of TechnologyDemonstration for a specific
theta:
28
I min I max
First time we check
(timeMin+ timeMax/)2Time + delta
Time-delta
If for )time+ delta( the distance from the target is shorter than we check
I max
If for Time-deltathe distance from the target is smaller
than we check
I min

Faculty of Electrical EngineeringTechnion – Israel Institute of Technology
for all the possible theta
In that way we find for every theta the time in the route with the minimum distance from the target. From all the thetas, we take the theta that give us the minimum distance to the target.
29

Faculty of Electrical EngineeringTechnion – Israel Institute of Technology
Demonstration for all the possible theta
30
target
stunner
10m
5m
8m
In this case this point will
be chosen
Faculty of Electrical EngineeringTechnion – Israel Institute of Technology
for all the possible thetaAfter we got the theta with the best result.we look again in the range of [theta-delta, theta+delta] with smaller resolution of theta (we divide delta in 10) . Until we find the best results and as long as delta>0.0001.
31

Faculty of Electrical EngineeringTechnion – Israel Institute of Technology
32

Faculty of Electrical EngineeringTechnion – Israel Institute of Technology
33
stun
ne r
targ
et

Faculty of Electrical EngineeringTechnion – Israel Institute of Technology
34
stun
ne rtarg
et
Faculty of Electrical EngineeringTechnion – Israel Institute of Technology
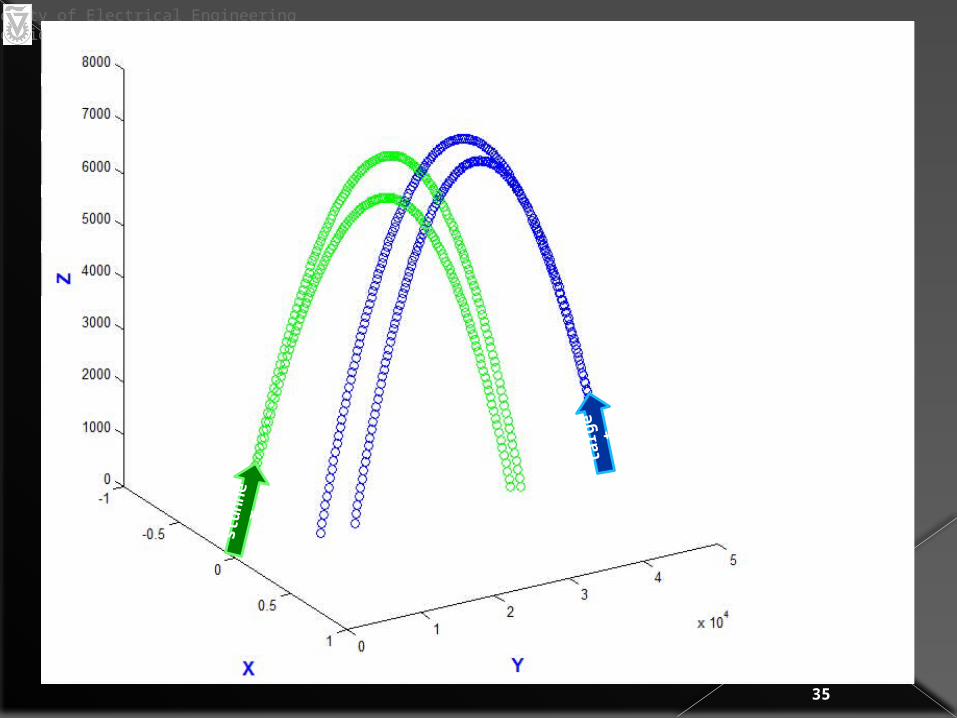
35
stun
ner
targ
et

Faculty of Electrical EngineeringTechnion – Israel Institute of Technology
36
first hit point
Hit point after the target change azimuth
Faculty of Electrical EngineeringTechnion – Israel Institute of Technology
Other possible solutionWe can find stunner route by making an offline table. Launch speed- is an absolute velocity in the launch point (0,0,0,)Theta- is the launch angle. Assumption : (1) launch speed [1-700]
(2) theta[0.01- /2]
37
Faculty of Electrical EngineeringTechnion – Israel Institute of Technology
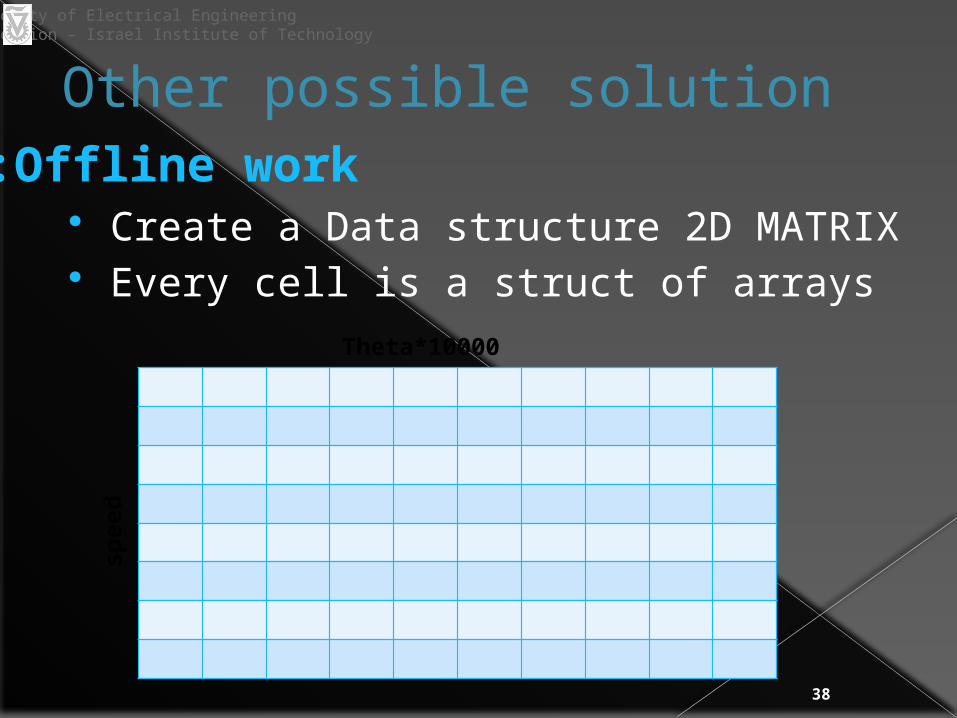
Other possible solution
Create a Data structure 2D MATRIX Every cell is a struct of arrays
38
Offline work:sp
eed
Theta*10000

Faculty of Electrical EngineeringTechnion – Israel Institute of Technology
39
spee
dTheta*1000
0
X.x
X.a
Z.a
Z.v
Z.z
Y.yY.v
Y.a
X.v
The 2D Matrix
In every cell there is a struct with 8 array
time
Faculty of Electrical EngineeringTechnion – Israel Institute of TechnologyOther possible solution (continue)
create routes with different Launch angles for theta[0.01-pi/2] and different launch speed.
∆theta=0.0001 rad During calculating the route we save
parameters to the relevant cell. We save for every direction: position, velocity, Acceleration. (according to the relevant launch speed and theta).
40
Offline work:

Faculty of Electrical EngineeringTechnion – Israel Institute of TechnologyOther possible solution (continue)
Given a start point (X◦, Y◦, Z◦) , velocity|V| and theta.
We define: delta z=Z◦ delta y=Y◦ delta x=X◦ For every start point we shift the
matrix according to the given start point. With the relevant delta.
41
online work:
Faculty of Electrical EngineeringTechnion – Israel Institute of TechnologyOther possible solution (continue)
Example1: For receiving z[time] for this Initial
conditions.
And the same for x and y.
42
online work:
Z[time]=table[|v|][theta][Z.z(time)]+delta z

Faculty of Electrical EngineeringTechnion – Israel Institute of TechnologyOther possible solution (continue)
For a given velocity we should find the new theta. We are using the offline table.
We will start by calculating Theta=(theta_min+theta_max)/2
For a specific theta We will make “desert lion” on the time, and find the point with the minimum distance , and the time it’s happens.
43
online algorithm:

Faculty of Electrical EngineeringTechnion – Israel Institute of TechnologyOther possible solution (continue)
After we found the time for the specific theta that gives minimum distance from the target.
We check the target in the same time. If the target is higher we return the
algorithm for[theta, theta_max ] Else we return the algorithm for [theta_min , theta] And so on until theta_max=theta_min. In that way we found theta that gives
the best results(minimum distance).44
online algorithm:

Faculty of Electrical EngineeringTechnion – Israel Institute of TechnologyOther possible solution (continue)
After we found the best theta we will use a dynamic algorithm.
In the range of [theta_best-delta, theta_best+theta]Note : explain how we find delta. We will make the first algorithm (lion
desert on time and on theta)and get a better result.
45
online algorithm:

Faculty of Electrical EngineeringTechnion – Israel Institute of Technology
The problem in this Algorithm The problem in this Algorithm is that
we have an offline table and every cell save parameters for a specific altitude.
when we do the shifting of the table. We do not consider the beta that changes during the change in altitude.
Beta depends on mach, Mach depends on speed of sound, and Speed of sound depends on altitude.
And that is why beta depends on altitude.
46
Faculty of Electrical EngineeringTechnion – Israel Institute of Technology
Solving the problem We solve the problem by using the
previous algorithm. After we find theta_best We do dynamic algorithm in the range [theta_best-delta, theta_best+theta] this dynamic algorithm calculate theta and beta in real time. In that way beta suit the current altitude. 47

Faculty of Electrical EngineeringTechnion – Israel Institute of Technology
references The international standard atmosphere
(ISA)—Mustafa Cavcar, Turkey Wikipedia (about runge kutta) Gui missile flyout –taylor & francis
groupFrom MIT
48