extracting information from the electrical activity of …ted/sigma_xi_055.pdfextracting information...
TRANSCRIPT

Extracting Information from the Electrical Activity of Human Skeletal Muscle
Edward (Ted) A. Clancy
Department of Electrical and Computer EngineeringDepartment of Biomedical Engineering
Worcester Polytechnic Institute, Worcester, MA, USA
EAC06–055
Sigma Xi Lecture – 4 October 2006

Worcester Polytechnic Institute
Presentation Overview• Brief background:
– Muscle electrical activity (EMG)
• Engineering models, methods for extracting “EMG amplitude”
• Applications of EMGamp:– Prosthesis control, gait biofeedback, EMG-
torque, EMG-impedance
• Surface EMG arrays ( newest stuff !!)
Introduction
EAC06–056
Worcester Polytechnic Institute
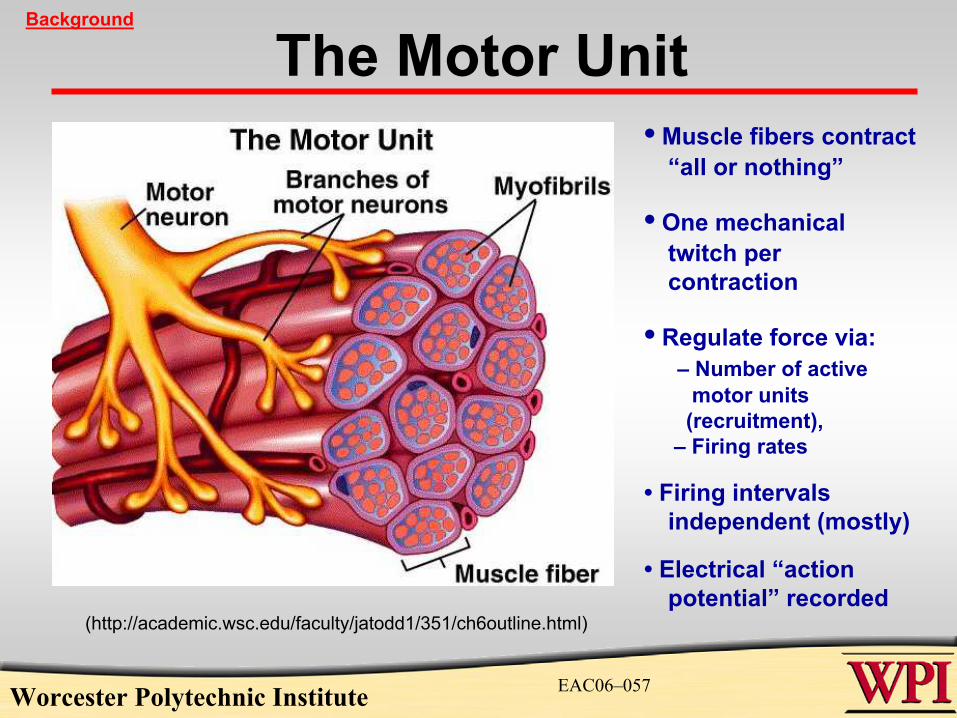
The Motor UnitBackground
EAC06–057
(http://academic.wsc.edu/faculty/jatodd1/351/ch6outline.html)
• Muscle fibers contract “all or nothing”
• One mechanical twitch per contraction
• Regulate force via:– Number of active
motor units(recruitment),
– Firing rates
• Firing intervals independent (mostly)
• Electrical “action potential” recorded

Worcester Polytechnic Institute
Electromyogram (EMG) Signal Model
“Interference pattern” EMG:Superimposition of multiple MUAPs plus measurement
additive noise.
EMG Signal Origin [Basmajian and De Luca, 1985]
Background
EAC06–058
MUAP

Worcester Polytechnic Institute
EMG Amplitude (EMGamp) Estimation
EAC06–059
EMGamp
EMGamp
EMG amplitude 0–10 mV (~1.5 mV rms)Surface EMG frequency bandlimited at 2000 Hz
• EMG Amplitude (EMGamp): “Intensity” of recorded EMG– “Time-varying standard deviation of EMG signal”
• Original estimator: Inman et al. [1956]– Analog full-wave rectify and RC low pass filter
Electrode-Amplifier(From Liberating Technologies)
– Varies with force

Worcester Polytechnic Institute
Improving EMGamp Estimation
• EMGamp improved by:– Removal of measurement noise– EMG signal whitening
• Adaptive whiteningTo reject measurement noise
– Multiple EMG channels (for large muscles)– Optimal detectors– Optimal smoothing (bias vs. variance error)
EAC06–060
EMGamp
Increases statistical bandwidth of EMG Reduces variance of amplitude estimate.{

Worcester Polytechnic Institute
Single Channel, Including Noise
Σ( )H etimejω
wi ni ir
si
mi
vi
Zero Mean, WSS,CE, White Process of Unit Intensity
Shaping Filter
Zero Mean,WSS, CE,Additive NoiseProcess
Measured SurfaceEMG
EMG Amplitude
Σ
iaCable andmotion artifact
ii vr +
Prakash et al., IEEE Trans Biomed Eng 52: 331–334, 2005.
WPI MQP !!!
EAC06–061
EMGamp

Worcester Polytechnic Institute
Multiple-Channel, Including Noise
EAC06–062
EMGamp
Clancy Ph.D., 1991.

Worcester Polytechnic Institute
Experimental Investigations• Separate EMGamp evaluation from
EMGamp-torque, EMGamp-impedance
EMGampEstimator
Target Tracking
ˆ s t( )m t( )
EMGamp-Torque
ˆ T
EMGamp-Impedance Jbk ,,
EAC06–063
EMGamp

Worcester Polytechnic Institute
Experimental Apparatus
EAC06–064
EMGamp
Clancy, IEEE Trans Biomed Eng 46:711–729, 1999.

Worcester Polytechnic Institute
EMG Electrode Sites
EMG Flexion 3
EMG Flexion 2
EMG Flexion 1
EMG Flexion 0
EMG Extension 3
EMG Extension 2
EMG Extension 0
EAC06–065
EMGamp
EMG Extension 1
Worcester Polytechnic Institute
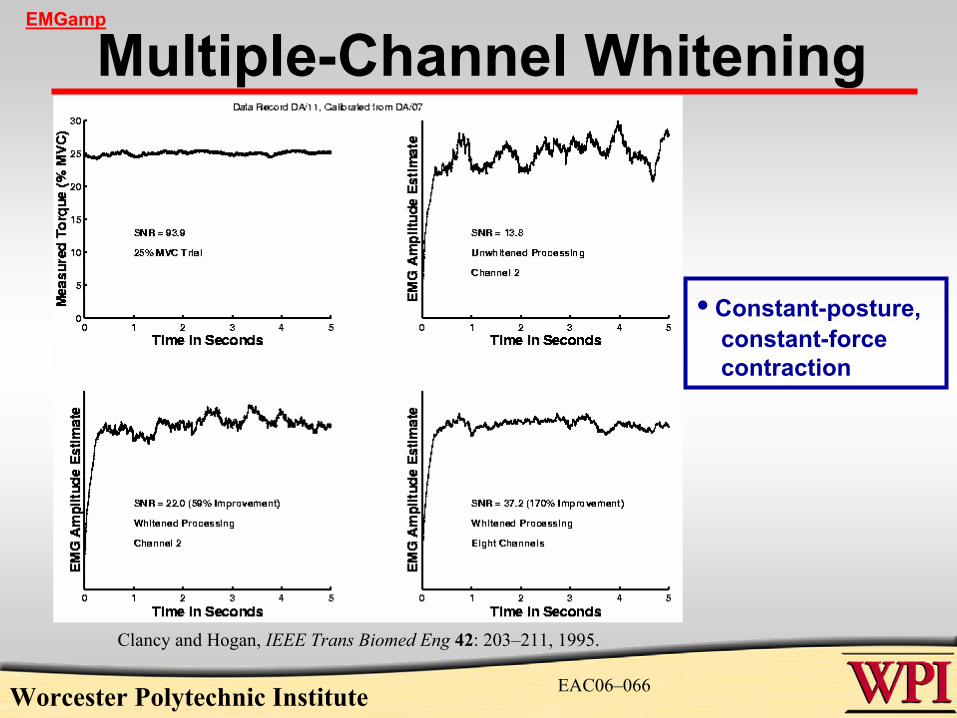
Multiple-Channel Whitening
EAC06–066
EMGamp
• Constant-posture, constant-force contraction
Clancy and Hogan, IEEE Trans Biomed Eng 42: 203–211, 1995.
Worcester Polytechnic Institute
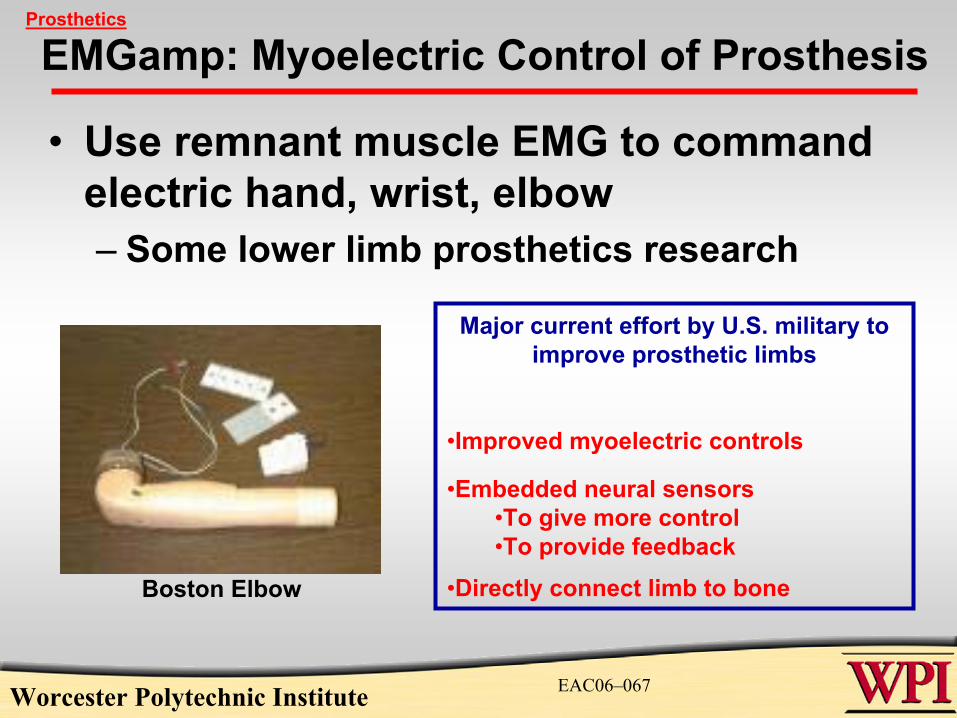
EMGamp: Myoelectric Control of Prosthesis
EAC06–067
Prosthetics
• Use remnant muscle EMG to command electric hand, wrist, elbow– Some lower limb prosthetics research
Major current effort by U.S. military to improve prosthetic limbs
•Improved myoelectric controls
•Embedded neural sensors•To give more control•To provide feedback
•Directly connect limb to boneBoston Elbow

Worcester Polytechnic Institute
Nerve Re-Innervation for Myocontrol
RIC Arm; www.popsci.com
• Kuiken nerve re-innervation surgery
• Nerves from severed limb re-connected to pectoralis muscle regions
• Several myocontrolsites created
• Substantial improvement
EAC06–068
Prosthetics

Worcester Polytechnic Institute
Myoelectric Control Example (Movie)
Jesse Sullivan video
EAC06–069
Prosthetics

Worcester Polytechnic Institute
Opportunities in Myocontrol
• Newer prosthetic limbs — circa 2002– Microprocessor– Digital control– Simultaneous control of multiple motors
• Advanced EMG processing now feasible– Not feasible previously in production arms
EAC06–070
Prosthetics

Worcester Polytechnic Institute
EMGamp: Gait Biofeedback
EAC06–xxx
Gait
EAC06–071
Re-training after stroke, traumatic
brain injury.

Worcester Polytechnic Institute
Biofeedback Gait Re-Training• Motivation: Some patients may not properly
relearn gait motor patterns– Incorrect timing of plantar flexor firing
• Long-Term Objective: Re-train proper gait via biofeedback (“normative” gait vs. patients)
• Short-Term Objectives:– Determine normative gastrocnemius firing pattern
over wide speed range (including slow)– Acquire pilot clinical data
EAC06–072
Gait

Worcester Polytechnic Institute
Healthy Raw Data: Two Walking Speeds
Footswitch
GastrocEMG
EAC06–073
Gait
Clancy et al., Am J Phys Med Rehabil 83: 507–514, 2004.

Worcester Polytechnic Institute
Healthy Gastroc EMGamp Templates
Heel Strike
EAC06–074
Gait
Clancy et al., Am J Phys Med Rehabil 83: 507–514, 2004.

Worcester Polytechnic Institute
Pilot Clinical Study• Subjects:
– 8 adults, > 2 years post-stroke, ambulatory• Methods:
– Treadmill walking, comfortable speed– EMG monitored, target EMG pattern shown– 12 training sessions (weekly, ~20–40 min)
• Result of before vs. after gait analysis–– ↑↑ Walking speed (5 subjects)–– ↑↑ Affected side single support (5 subjects)–– ↑↑ Stride length (4 subjects)–– ↑↑ Ankle power (7 subjects)
Aiello et al., 2006.Spaulding Hospital
EAC06–075
Gait

Worcester Polytechnic Institute
EMGamp: EMG-Torque Uses
EAC06–076
EMG-torque
• Non-invasive torque measurement for scientific studies
• Study/evaluation of worker safety– Repetitive, high-force tasks can lead to
cumulative trauma injuries

Worcester Polytechnic Institute
Simple Elbow Mechanics Model
EAC06–077
EMG-torque
Elbow joint flexedFlexor muscles contractedExtensor muscles relaxed
Elbow joint extendedExtensor muscles contracted
Flexor muscles relaxed
biceps
triceps
Clancy Ph.D., 1991
TNET = TF+TE
(www.mrothery.co.uk)

Worcester Polytechnic Institute
EMG-Torque Block Diagram
ExtensorEMG
AmplitudeEstimator
ExtensorEMG
Amplitude toTorque
Estimator
mE1,i
mE2,i
mELE,i
FlexorEMG
AmplitudeEstimator
FlexorEMG
Amplitude toTorque
Estimator
mF1,i
mF2,i
mFLF,i
Σ
ŝE
ŝF
ΤE
ΤExt
ΤF
_
+
……
• Relate biceps, triceps EMGamp to elbow torque• Compare conventional vs. advanced EMGamp processors
EAC06–078
EMG-torque

Worcester Polytechnic Institute
• Slowly force-varying No dynamics
• Constant Posture
EMGamp-Torque: Static Contraction
Clancy and Hogan, IEEE Trans BiomedEng 44: 1024–1028, 1997.
Tor
que
in A
/D U
nits
Tor
que
in A
/D U
nits
Time in Seconds
Time in Seconds
Unwhitened, Single-Channel Processor
Whitened, Four-Channel Processor
EAC06–079
EMG-torque

Worcester Polytechnic Institute
EMG-Torque: Constant-Posture, Force-Varying
5 1 0 1 5 2 0 2 5-4 0 0
-3 0 0
-2 0 0
-1 0 0
0
1 0 0
2 0 0
3 0 0
4 0 0E x te n s io n (T r ic e p s M /C )
T im e (s e c )
Raw
EM
G in
%M
VEE
5 1 0 1 5 2 0 2 5-4 0 0
-3 0 0
-2 0 0
-1 0 0
0
1 0 0
2 0 0
3 0 0
4 0 0F le x io n (B ic e p s L /C )
T im e (s e c )
Raw
EM
G in
%M
VEF
5 1 0 1 5 2 0 2 5-5 0
-4 0
-3 0
-2 0
-1 0
0
1 0
2 0
3 0
4 0
5 0R e a l T o rq u e a n d P re d ic te d T o rq u e N o rm a liz e d in % M V C
T im e (s e c )
Torq
ue A
mpl
itude
%M
VC
P o si tiv e T o rq u e - F le x io n
N e g a tiv e T o rq u e - Ex te n sio n
R e a l T o rq u e : M e a su re dP re d ic te d T o rq u e , U n w h i te n e d EM GP re d ic te d T o rq u e , W h i te n e d EM G
Clancy et al., J Biomechanics, 2006.
EAC06–080
EMG-torque

Worcester Polytechnic Institute
EMG-Torque: Force-Varying, Results
0 5 10 15 20 25 3020
30
40
50
60
70
80
90 M e d ian o f % V A F , F as t T rack in g S p e e d
S ys te m Id en tific a tio n O rd e r, n b
%VA
F
0 5 10 15 20 25 305
10
15M e d ian o f M A E , F ast T rack in g S p e e d
S y ste m Id e n tific a tio n O rd e r, n b
MA
E (P
erce
nt)
0 5 10 15 20 25 3020
30
40
50
60
70
80
90 M e an o f % V A F , F ast T rack in g S p e e d
S ys te m Id en tific a tio n O rd e r, n b
%VA
F
0 5 10 15 20 25 305
10
15M e an o f M A E , F as t T rack in g S p e e d
S y ste m Id e n tific a tio n O rd e r, n b
MA
E (P
erce
nt)
S -CH-UNW HITS -CH-W HITM -CH-UNW HITM -CH-W HIT
S -CH-UNW HITS -CH-W HITM -CH-UNW HITM -CH-W HIT
S -CH-UNW HITS -CH-W HITM -CH-UNW HITM -CH-W HIT
S -CH-UNW HITS -CH-W HITM -CH-UNW HITM -CH-W HIT
55%
80%
10%
7.3%
Clancy et al., J Biomechanics, in press.EAC06–081
EMG-torque

Worcester Polytechnic Institute
EMG-Torque Summary
• Future directions– Applications in ergonomics
• Constant-posture tasks– Relax postural constraints– Multi-joint systems
Better EMGamp Better EMGamp Better TorqueBetter Torque
EAC06–082
EMG-torque

Worcester Polytechnic Institute
EMG-Impedance Block Diagram
EMGAmplitude toImpedanceEstimator
k (stiffness)
ExtensorEMG
AmplitudeEstimator
mE1,i
mE2,i
mELE,i
ŝE…
FlexorEMG
AmplitudeEstimator
mF1,imF2,i
mFLF,i
ŝF…
b (viscosity)
J (inertia)
Higher-quality EMG amplitude estimates should give better impedance estimation.
Second-order, linear model; constant operating point.
EAC06–083
EMG-impedance
Worcester Polytechnic Institute
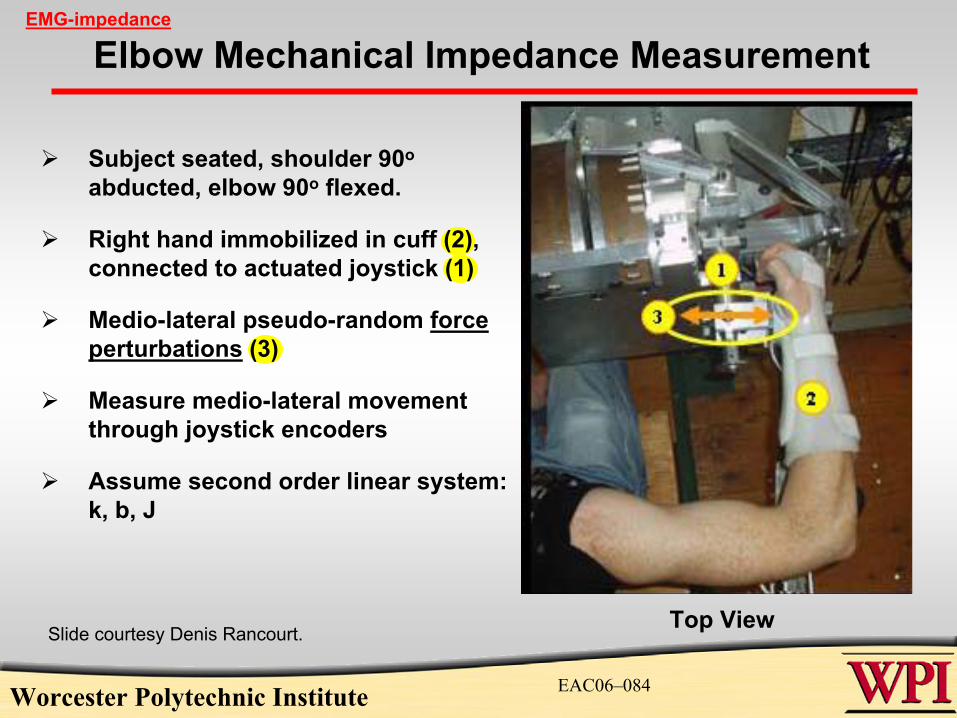
Elbow Mechanical Impedance Measurement
Subject seated, shoulder 90o
abducted, elbow 90o flexed.
Right hand immobilized in cuff (2), connected to actuated joystick (1)
Medio-lateral pseudo-random forceperturbations (3)
Measure medio-lateral movementthrough joystick encoders
Assume second order linear system: k, b, J
Top ViewSlide courtesy Denis Rancourt.
EAC06–084
EMG-impedance

Worcester Polytechnic Institute
System Validation for Mechanical Impedance
Known inertia, stiffness
0–15 Hz torque input (20 sec)
For 0, 20 and 40 degrees
2% variation in stiffness
% VAF = 92 %
( )( )
−
−=
∑
∑
=
=n
kk
n
kkk
f
ffVAF
1
2
1
2
ˆ
ˆ
1*100%
10 10.5 11 11.5 12 12.5 13 13.5 14 14.5 15
-10
-5
0
5
10
Temps (s)
Forc
e (N
)
Force x brute
Slide courtesy Denis Rancourt.
EAC06–085
EMG-impedance
Worcester Polytechnic Institute
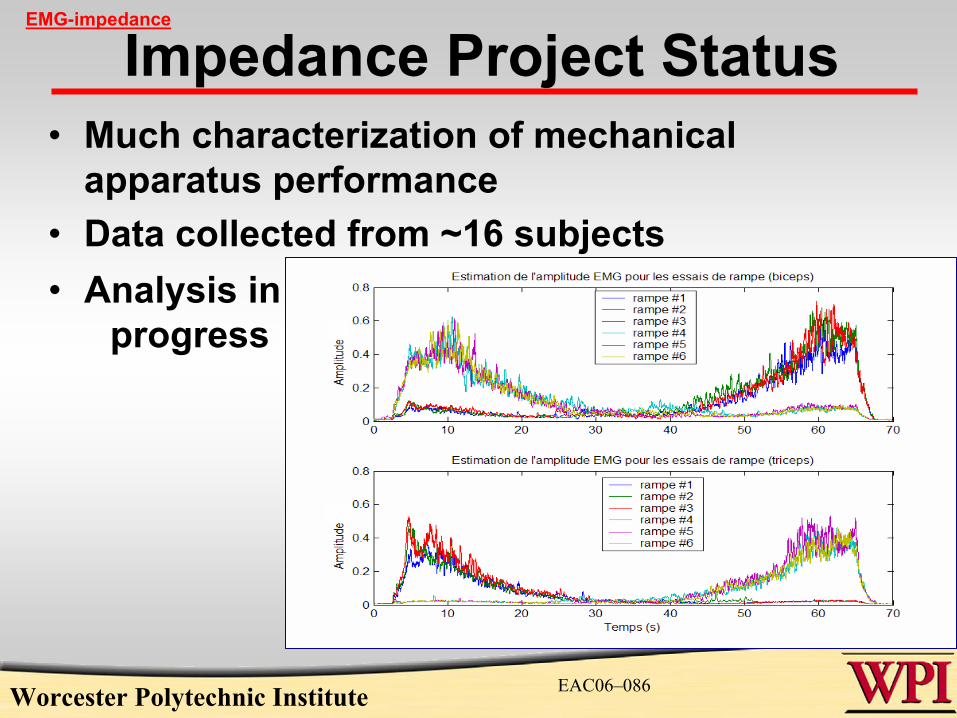
Impedance Project Status• Much characterization of mechanical
apparatus performance• Data collected from ~16 subjects
EAC06–086
EMG-impedance
• Analysis inprogress

Worcester Polytechnic Institute
Motor Unit Decomposition
EAC06–087
EMG Arrays
Sweep speed = 10 ms/div; Sensitivity = 1.0mV/div
Motor unit potential with reinnervationDecomposition Shows:
• Firing times, firing shapes
• Scientific, physiologic, clinical information
(http://www.neuro.wustl.edu/neuromuscular/pathol/diagrams/linkedpot.htm)
Partial Denervation: EMG
• High amplitude, long duration, polyphasic, late potentials

Worcester Polytechnic Institute
Electrodes for EMG Decomposition
• Needles (traditional)+ High spatial resolution
(↓ superimpositions)– Invasive patient discomfort; cover small region
• Surface arrays (experimental)+ Noninvasive+ Larger spatial range
fiber conduction velocity– Less spatial resolution– Mostly record surface fibers
EAC06–088
5 mm
www.neurosupply.com
EMG Arrays

Worcester Polytechnic Institute
• Spatially selective; Resolve individual MUs– Locate neuromuscular junction– Measure conduction velocity– Non-invasively decompose EMG
• Output = Weighted sum of mono. electrodes
High-Resolution Surface EMG
( ) ( ) ( )tetetVFilt 21 −=
( ) ( ) ( ) ( )( ) ( )te4 5⋅−+
++=te
tetetetVFilt
4
321
–2
+1
+1
–1
+1
BipolarLinear Double
Difference (LDD)Normal Double
Difference (NDD)
–4+1
+1
+1
+1
EAC06–089
EMG Arrays
( ) ( ) ( ) ( )tetetetVFilt 321 2 +⋅−=

Worcester Polytechnic Institute
Array EMG Hardware• Common mode rejection ratio (CMRR):
– Requires precise weights– Rejects power-line; permits spatial combination
• For high CMRR, weight channels in hardware– Separate analog circuit for each channel– Too many combinations possible!
• So, either:– Pre-wire a few montages– Accept lower CMRR from software combination
NOTE: Problem is an instrumentation issue.
EAC06–090
EMG Arrays

Worcester Polytechnic Institute
Software-Equalized Array
Analog Signal Conditioning
Circuit #1e1
Linear Equalization
Filter #1A/D EMG1
Analog Signal Conditioning
Circuit #2e2
Linear Equalization
Filter #2A/D EMG2
Analog Signal Conditioning
Circuit #NeN
Linear Equalization
Filter #NA/D EMGN
... ...
Hardware Software
MonopolarElectrodeInputs
EqualizedMonopolarChannels
EAC06–091
EMG Arrays
Worcester Polytechnic Institute
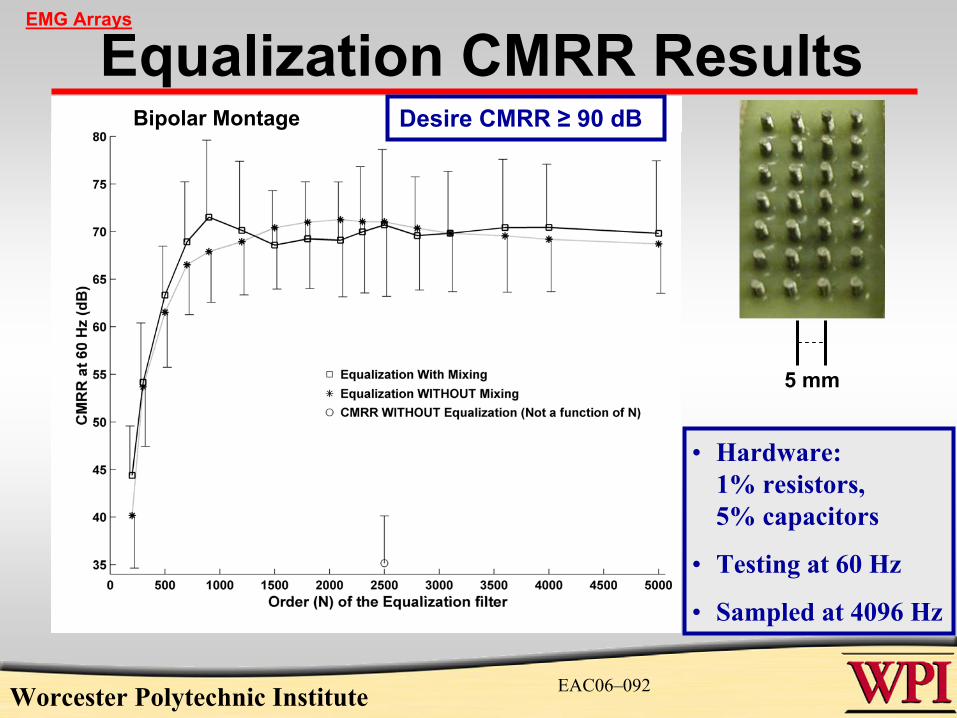
Equalization CMRR Results
• Hardware: 1% resistors, 5% capacitors
• Testing at 60 Hz
• Sampled at 4096 Hz
5 mm
Bipolar Montage
EAC06–092
EMG Arrays
Desire CMRR ≥ 90 dB

Worcester Polytechnic Institute
=
)()()()()()()()()(
332313
322212
312111
tetetetetetetetete
Data
• Simulate each monopolarmonopolar surface electrode– Many xyz tripole (AP) locations within muscle
• Select desired spatial filterdesired spatial filter output voltage– Ones for regions of interest– Zeroes for regions of non-interest
• Solve for optimal weights using least squares– Monopolar potentials & output voltages known– Filter weights unknown
• Example:
Pilot Spatial Filter Technique
EAC06–093
EMG Arrays
)()(
)()()(
11113131
21211111
tewtew
tewtewtVSpatial
++
++=
L
{ – Similar to DSPlinear filter design

Worcester Polytechnic Institute
Example Results
• Filtered Surface Potentials
– Top left: Monopolar Filter3 dB Area = 35.22 mm2
– Top right: NDD Filter3 dB Area = 22.24 mm2
– Bottom Left: LS Filter3 dB Area = 8.95 mm2
• Second selectivity metric
– Bottom right: Case of two APs, LS and NDD Filters
• Y-offset = 2 mm• LS Ratio = 0.121• NDD Ratio = 0.779
EAC06–094
EMG Arrays

Worcester Polytechnic Institute
Conclusions of Pilot Work• Preliminary simulation results:
– Least squares filters have superior spatial selectivity than NDD, monopolar configurations
– Only simple simulation results so far!!
• Selectivity of LS filters dependent on:– Inter-electrode spacing, action potential depth, number of
electrodes
• Next steps:– More realistic electrophysiologic models– Incorporate measurement noise– More mature optimization– Test with physiologic data
EAC06–095
EMG Arrays

Worcester Polytechnic Institute
“EMGlab” on the Web
– Open-source software for EMG decomposition/ viewing
– EMG signal data base
– Data and annotation standards development
EAC06–096
EMGlab
A forum for sharing software, data, and information related to EMG decomposition
http://emglab.stanford.edu/ Kevin McGill, VA Palo Alto & Stanford

Worcester Polytechnic Institute
Research Collaborators
EAC06–097
Collaborators
… with several photos missing.… and, hopefully, many more to add in the years to come!!