expectation particle belief...
TRANSCRIPT

Expectation Particle Belief PropagationThibaut Lienart, Yee Whye Teh and Arnaud Doucet
Juho Kim
December 1, 2016
Goal
• Infer the marginals approximately in pairwise Markov Random Fields on a continuous state space.
• Improve an existing algorithm, Particle Belief Propagation (PBP) (Ihlerand McAllester, AISTATS 2009) by using expectation propagation.
• Attain more accurate and efficient inference results.

Motivation of Particle-based Belief Propagation
• Popular choice for inference in general Markov Random Fields.
→ Loopy Belief Propagation (LBP)
• When dealing with continuous random variables, computing exactly the messages transmitted by LBP is generally intractable.
• PBP and EPBP compute the messages based on sampling to attain the computational tractability.

Background and Notations
• For a pairwise MRF, a distribution over a set of continuous random variables is represented by:
• The LBP fixed-point update can be written as follows at iteration t:

Particle Belief Propagation (PBP)
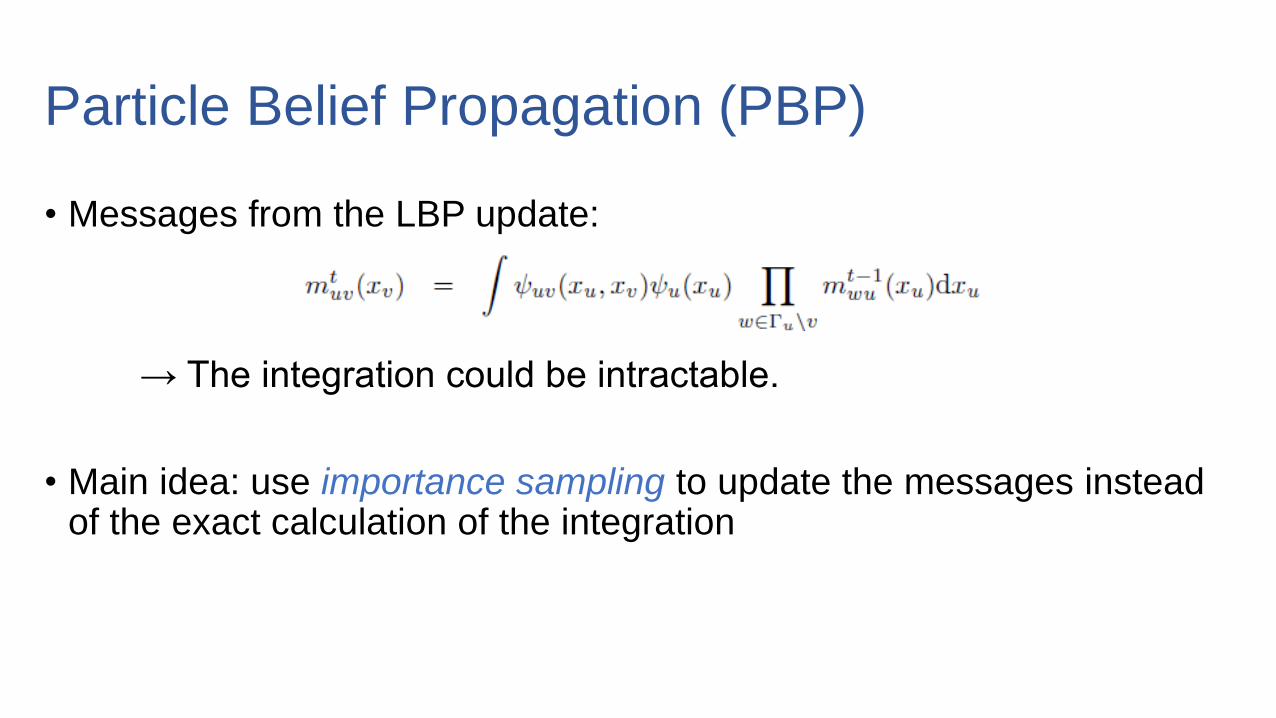
• Messages from the LBP update:
→ The integration could be intractable.
Particle Belief Propagation (PBP)
• Messages from the LBP update:
→ The integration could be intractable.
• Main idea: use importance sampling to update the messages instead of the exact calculation of the integration

Importance sampling
• f is some function and P is the probability density function of X.
• Rather than sampling from P (Monte Carlo integration), we specify a different probability density function Q as the proposal distribution.
• Expectation under Q

Back to Particle Belief Propagation (PBP)
• Recall the messages from the LBP update:
• Given a proposal distribution 𝑞𝑢 on node 𝑢 and a set of N particles {𝑥𝑢(𝑖)}𝑖=1𝑁 ~𝑞𝑢(𝑥𝑢),
Back to Particle Belief Propagation (PBP)
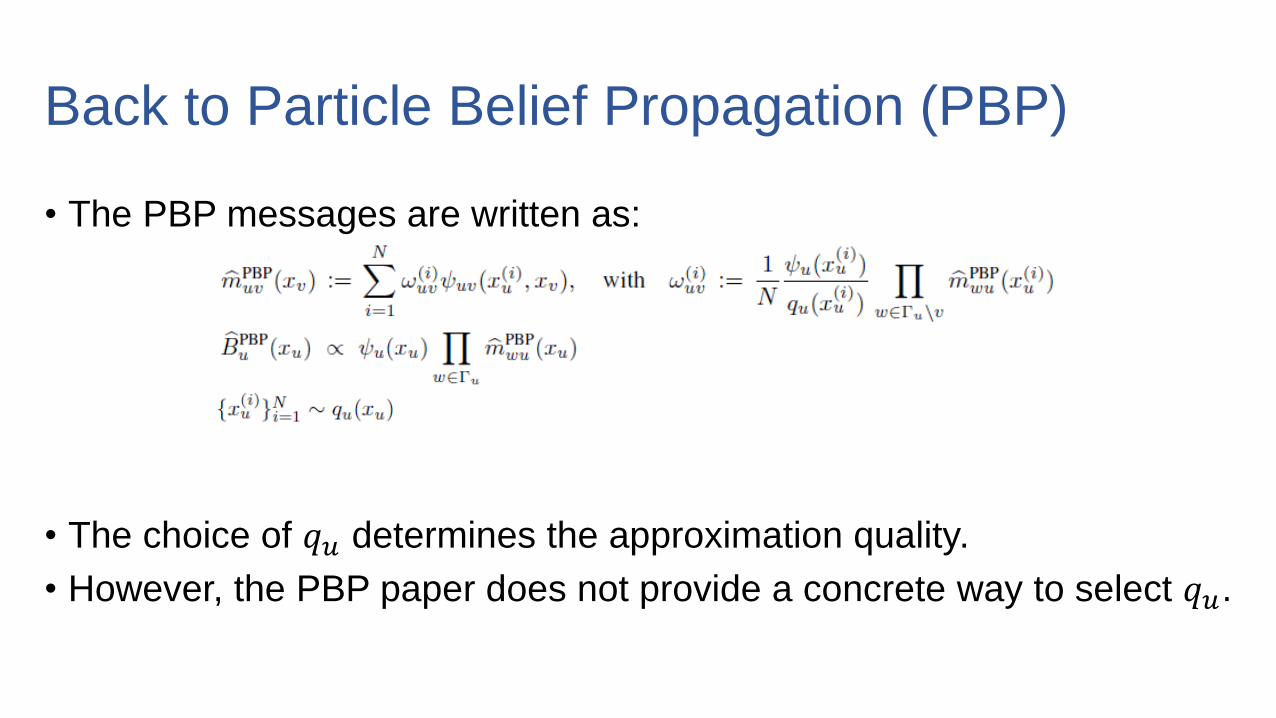
• The PBP messages are written as:
• The choice of 𝑞𝑢 determines the approximation quality.
• However, the PBP paper does not provide a concrete way to select 𝑞𝑢.

Expectation Particle Belief Propagation (EPBP)• Address the issue of selecting the proposal distributions in PBP.
- The proposal distribution is constructed adaptively considering evidence
collected through message passing.
- Use exponential family distributions as proposals on a node for
computational efficiency.
- Choose the parameters of the proposals adaptively based on current
estimates of beliefs and expectation propagation.
• Notations
: exact (but unavailable) LBP messages from u to v
: particle approximation of
: exponential family estimation of
Expectation Particle Belief Propagation (cont’d)
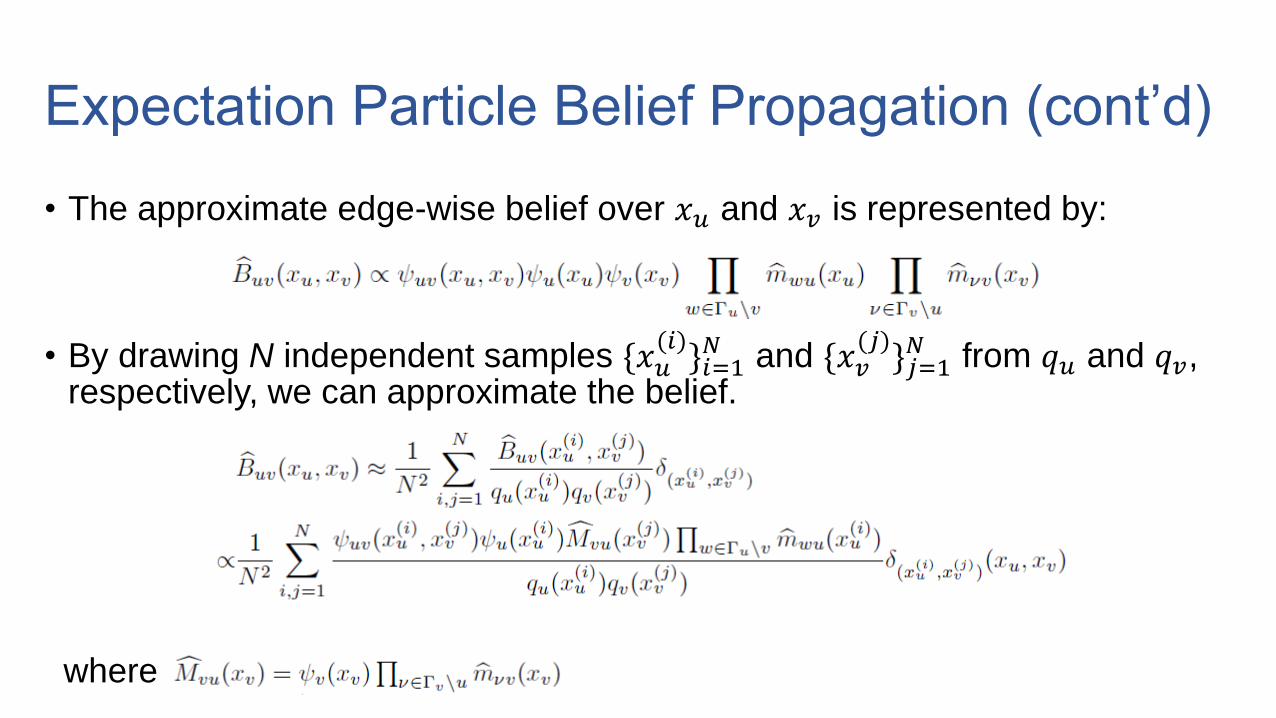
• The approximate edge-wise belief over 𝑥𝑢 and 𝑥𝑣 is represented by:
• By drawing N independent samples {𝑥𝑢(𝑖)}𝑖=1𝑁 and {𝑥𝑣
(𝑗)}𝑗=1𝑁 from 𝑞𝑢 and 𝑞𝑣,
respectively, we can approximate the belief.
where

Expectation Particle Belief Propagation (cont’d)
• By marginalizing onto 𝑥𝑣, we have the particle approximation to 𝐵𝑢𝑣(𝑥𝑣)
where ෝ𝑚𝑢𝑣 = ෝ𝑚𝑢𝑣𝑃𝐵𝑃.
• The marginalized belief is proportional to:
Expectation Particle Belief Propagation (cont’d)
• EPBP uses a tractable exponential family distribution for 𝑞𝑢
where 𝜂ₒ𝑢 and 𝜂𝑤𝑢 are exponential family approximations of 𝜓𝑢 and
ෝ𝑚𝑤𝑢 respectively.
• Using the framework of expectation propagation, that is, minimizing KL divergence KL( 𝐵𝑢𝑣|𝑞𝑢𝑞𝑣) as the closeness measure, we can iteratively find good exponential family approximations.

Expectation Particle Belief Propagation (cont’d)
• Pick one node 𝑤 ∈ Γ𝑢 and update the related exponential family distribution 𝜂𝑤𝑢 by tuning the parameters of the distribution.
• Iteratively tune the parameters of each node distribution for the cavity distribution that removes the tuned distribution.
• The updated 𝜂𝑤𝑢+ is the exponential family factor minimizing the
following KL divergence:

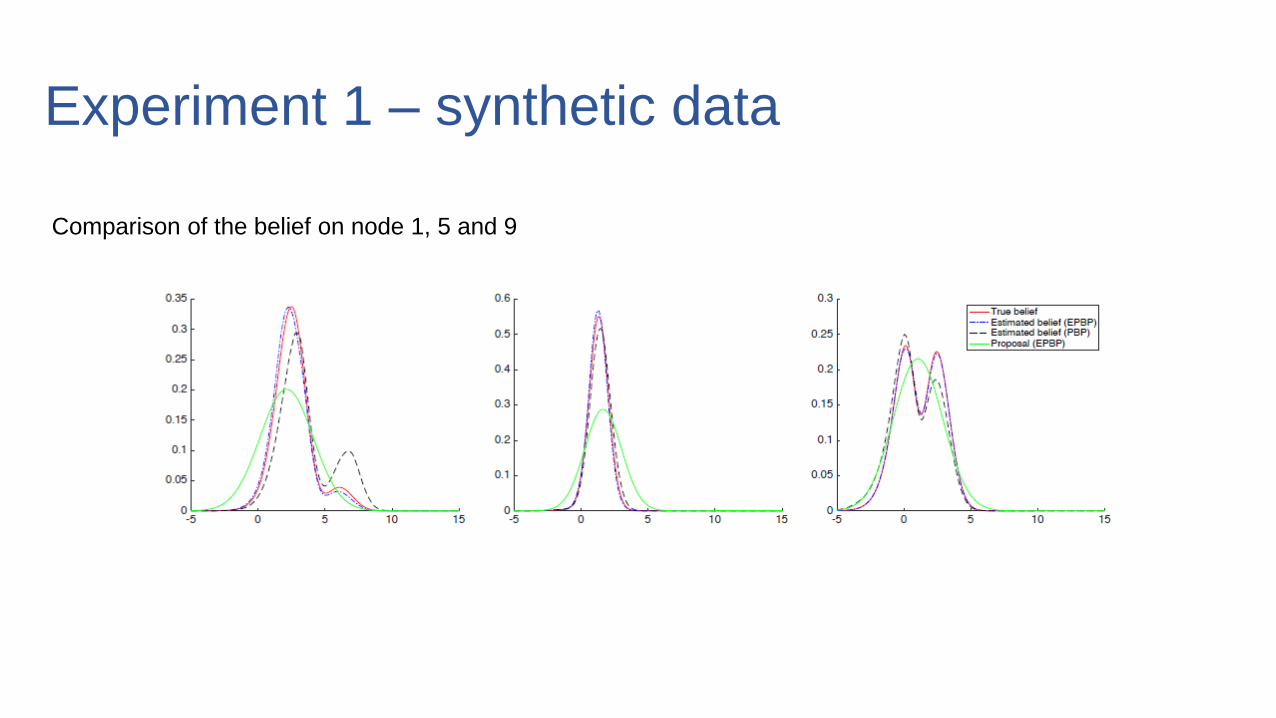
Experiment 1 – synthetic data
Experiment 1 – synthetic data
Comparison of the belief on node 1, 5 and 9

Experiment 2 – denoising application
The value assigned to each pixel of the reconstruction is the estimated mean obtained over the corresponding node.
• Image size: 50 x 50
• Number of particles: 30
• Number of BP iterations: 5
original noisy recovered image
using EPBP
recovered image
using simple EP
Summary
• EPBP improves an existing particle-based belief propagation PBP by tuning proposal distributions adaptively using expectation propagation.
• Infer marginals in general Markov Random Fields more accurately and efficiently than PBP.
Questions?