euref's reference systems and positioning services
TRANSCRIPT

International Association of Geodesy Reference Frame
Sub-Commission for Europe
Johannes Ihde 1), Chair of EUREF
And Members of the Technical Working Group
Z. Altamimi, E. Brockmann, C. Bruyninx, A. Caporali,
J. Dousa, R. Fernandes, H. Habrich,
A. Kenyeres, M. Lidberg, M. Poutanen,
M. Sacher, W. Söhne, G. Stangl, J. Torres, C. Völksen, G. Weber
EUREF's Reference Systems and
Positioning Services
3. CROPOS Conferenz
Opatija
October 24-25, 2013
1)Contact: Federal Agency for Cartography and Geodesy (BKG)
Richard-Strauss-Allee 11, D-60598 Frankfurt on Main
Contents
(1) About EUREF
(2) EUREF’s Infrastructure
(3) European Reference Systems ETRS89 and EVRF2007
(4) Multi GNSS and Galileo
(5) Reference Frames in Real-Time
(6) EUREF, NMCA’s - How to proceed?
EUREF's Reference Systems and
Positioning Services

(1) About EUREF
• Creation in 1987 at the IUGG General Assembly in Vancouver
• Sub-commission 1.3a of the International Association for Geodesy (IAG)
• Central Bureau of the EUREF Permanent GNSS Network (EPN) in Brussels, Secretary in Padua
• Permanent committee is the Technical Working Group with about 15 members (3 meetings per year)
• Links to about 130 European organizations, agencies, universities – related to geo-referencing, positioning, and navigation – meets at an annual Symposium
• GNSS – Global Navigation Satellite Systems (GPS, GLONASS, Galileo)

• Promotion and assistance of the adoption and use of European Terrestrial Reference System (ETRS89)
• Development of the EUREF GNSS Permanent Network (EPN) - the ground based GNSS infrastructure for scientific and practical applications in positioning and navigation
• Development of the European Vertical Reference System - has arrived 2007 a new stage (EVRS2007)
• Provides all its products and services on the “best effort” basis and free of charge to the public
Mission of EUREF
Definition, realization and maintenance of the
European Geodetic Reference Systems

(2) EUREF Infrastructue EUREF PERMANENT NETWORK EPN
5
GNSS Permanent Network
(EPN) with 250 stations
130 EPN stations are part
of ITRF2008
About 150 stations
provides RT and
GLONASS data 40
Galileo
Station movements
monitored
EPN Regional Densification in Europe: Provide reference system data and
information in ITRS and ETRS89 to European users by GNSS technologies
National Level
European Level
Global Level

250 GNSS tracking
stations
7 Data Centres
17 Analysis
centers
EUREF PERMANENT NETWORK EPN
Since 2013
MUT/WUT are
analysis coordinator
EPN stations providing GNNS data is the key infrastructure
EPN runs GNSS stations in a well organized environment and serves as the backbone of the realization and for access to the ETRS89.

7
UELN lines and
datum points of
EVRF2007
United European Levelling Network UELN

Memorandum of
Understanding
Memorandum of
Understanding
CEGRN Central European Geodynamic Reference Network ICG
Network of Cooperation
Memorandum of
Understanding

INSPIRE GEO-SPATIAL DATA SETS
X,Y,Z
φ,λ,h
φ,λ
x,y
H
H
ATTRIBUTES /
PARAMETERS
COORDINATES
pressur
e depth
time
…
3D/2D CRS
National
WGS84
ITRS
ETRS89
WHS
EVRS
1D CRS
National
None
CA
RT
OG
RA
PH
I
C P
RO
JE
CT
ION
E
LL
IPS
OID
3D
2D
+ 1
D
Coordinate Reference Systems Concept
For INSPIRE
(Infrastructure for Spatial Information in Europe)

European Terrestrial Reference System 89 (ETRS89)
• The datum is fixed to the stable part of the European
Plate at the epoch 1989.0 (Coincides with ITRS at epoch
1989.0)
• Realized by ETRF2000(Rxx) derived from ITRFxx by removing
the mean velocity of the European plate (xx is currently 2008)
• based on EUREF GNSS Permanent Network EPN
• European Commission adopted ETRS89 as the geodetic
datum for geo-referenced information of INSPIRE
European Vertical Reference System 2007 (EVRF2007)
• Related European Vertical Datum (NAP)
• Realized by the United European Levelling Network (UELN)
• Use of EVRS 2007 vertical datum for INSPIRE data.
(3) ETRS89 and EVRF2007 Improvements of EUREF Products

ITRFyy to ETRF2000
11
ITRF2008 ETRF2008
ITRF2005
ITRF2000
ITRF97
ITRF93
ETRF2005
ETRF2000
ETRF97
ETRF93
IER
S(I
TR
F)
tra
nsf
orm
ati
on
Memo Transfo
14 Param
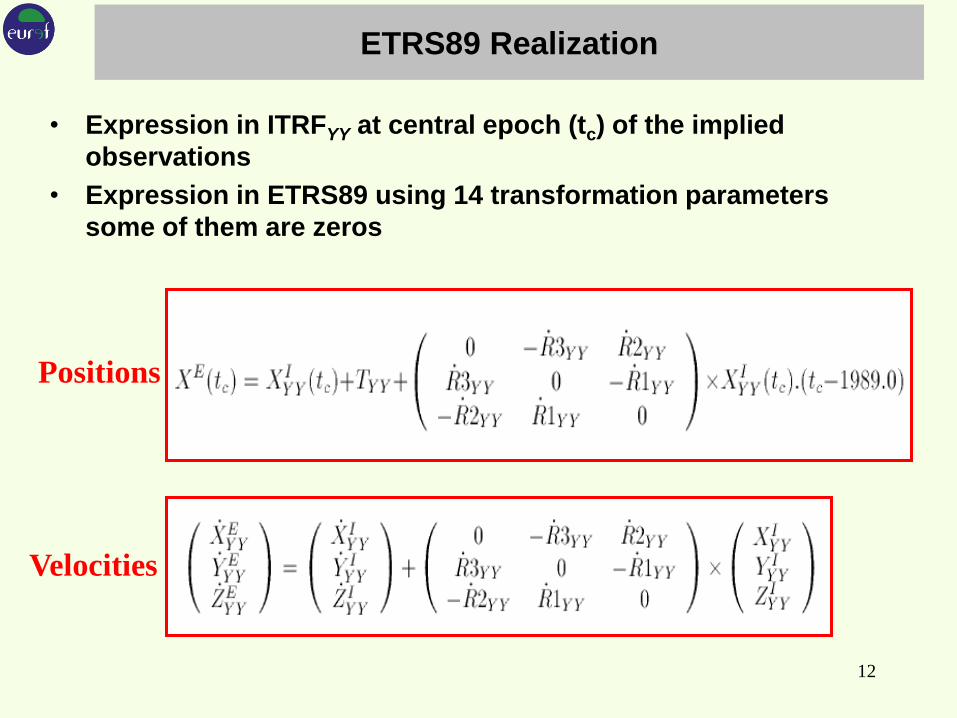
ETRS89 Realization
• Expression in ITRFYY at central epoch (tc) of the implied
observations
• Expression in ETRS89 using 14 transformation parameters
some of them are zeros
12
Positions
Velocities

13
• Datum realization by 13 datum points
• Reduction to the zero tidal system
• Reduction of the measurements to the epoch 2000
using the whole NKG2005LU model
Parameter EVRF2000 EVRF2007
Number of datum points 1 13
Number of unknowns 3063 7939
Number of measurements 4263 10347
Number of condition
equations 0 1
Degrees of freedom 1200 2409
A-posteriori standard
deviation referred to 1 km
levelling distance in
kgal·mm
1.10 1.11
Mean value of the standard
deviation of the adjusted
geopotential numbers
( ̂ heights), in kgal·mm
19.64 16.05
Average redundancy 0.281 0.233
EVRS realization
EVRF2007 –Summary of the adjustment parameters

EVRF2007 - Spirit leveling Approach
14
sysemHH NVRFEVRF 12007
http://www.crs-geo.eu

Gravity field approach with GOCE and EUVN-DA
Standard deviation
15
(4) Multi GNSS and Galileo MULTI-GNSS Working Group EUREF
In 2012 a Multi-GNSS Working Group established in the EUREF
Technical Working Group (TWG). Main goals of the WG are:
Handling data formats RINEX3.xx and/or RINEX2.xx and
compatibility to RTCM 'High Precision Multiple Signal
Messages' (HP MSM) and procedure to implement it to the
EPN
Enhancing the EPN infrastructure by Multi-GNSS-ready
receivers and antennas
Developing of software (post-processing and real-time)
capable to handle multi-GNSS signals
Setting up a time schedule in order to plan the operational
switch to RINEX3 which also is in line with IGS.
16

IGS Multi-GNSS Experiment (M-GEX)
17
MGEX stations in Europe as taken from the
MGEX web page (igs.org/mgex)
18
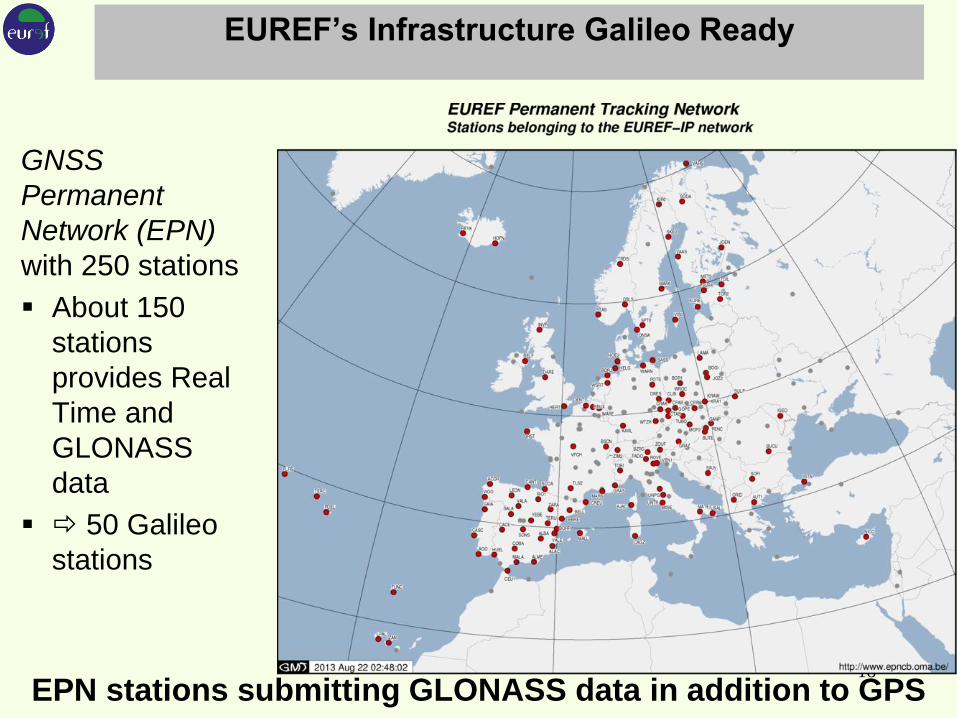
EUREF’s Infrastructure Galileo Ready
GNSS
Permanent
Network (EPN)
with 250 stations
About 150
stations
provides Real
Time and
GLONASS
data
50 Galileo
stations
EPN stations submitting GLONASS data in addition to GPS

(5) Reference Frames in Real-Time
19
IGS Real-time GNSS Service
Real-time IGS Working Group since 2001
Real-time Pilot Project since 2007
Analysis Centers:
BKG, CNES, CTU, DLR, ESA, Geo++, GMV, GFZ, NRCan,
Wuhan Uni
IGS permanent RT service started last year and is
changed to an official cervice
Reference Frames in Real-Time with PPP-RTK
Local RTK networks
−stabile realization of (access to) ETRS89 in all countries
− long term maintenance of ETRS89 also in tectonically affected
areas
− a few cm accuracy within a few observation epochs
− local reference stations and reference frames realization
− no daily activity from EUREF in this domain
PPP-RTK
− PPP is global approach
− concept doesn’t request local reference stations
− global reference frame realization; if needed transformed to
regional or local reference frames
• Added value: basic input for science and safety (e.g.,
tectonic risk assessment)
20
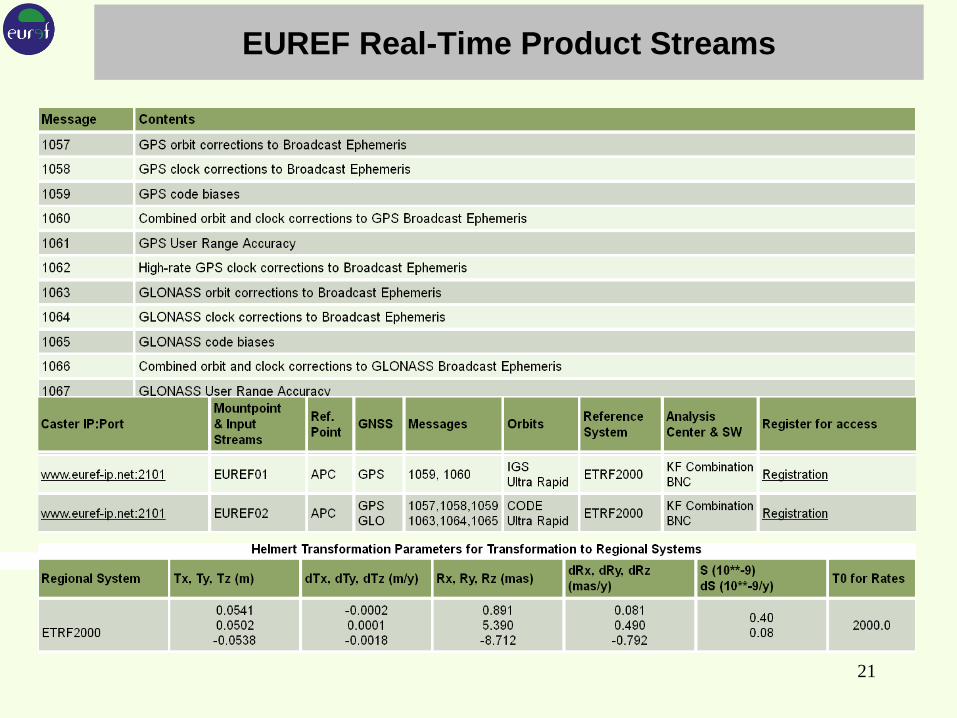
EUREF Real-Time Product Streams
21
EUREF Real-Time Data Streams
22
EUREF (left) and IGS real-time stations in Europe as taken from the
monitoring web page of BKG (bkgmonitor.dgpsonline.eu)

(6) EUREF, NMCA’s - How to proceed?
Summary
EUREF supports all satellite navigation systems: especially
GLONASS and Galileo recommended from data collection to
analysis
EUREF established real-time services in cooperation with
NMAs: data and product streams, permanent PPP
monitoring, development of tools, e.g., BNC
Introduction of the upcoming European GNSS Galileo
will be a big challenge for EUREF by upgrading the
station equipment while keeping a stable reference
frame.
EUREF prepare a Multi-GNSS-RT-Service
23

NMCA‘s: How to proceed?
Today’s Network RTK resources will not become
obsolete, PPP-RTK just develops towards an alternative
Use EUREF´s PPP product/service for further
dissemination through national Ntrip resources
Test & validate EUREF´s PPP in their countries, Open
Source software available through BNC and RTKLIB
Consider making use of EUREF´s real-time product part
of the national real-time product portfolio
24

bb 25