estimating the probability of a timely traffic-hazard ...phoenix/docs/anss2015.pdf · estimating...
TRANSCRIPT

Estimating the Probability of a TimelyTraffic-Hazard Warning via Simulation
Nils Müllner, Sibylle Fröschle, Martin Fränzle
Interdisciplinary Research Center onCritical Systems Engineering for
Socio-Technical Systems
CA RLVON
OSS I ET Z KY
January 12, 2015

Brief Problem Outline Practical Application Conclusion
Agenda I
1 Brief Problem Outline
2 Practical Application
3 Conclusion
Nils Müllner, Sibylle Fröschle, Martin Fränzle 2/13

Brief Problem Outline Practical Application Conclusion
Underlying question
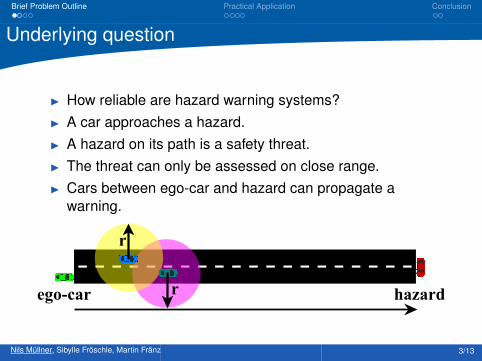
I How reliable are hazard warning systems?I A car approaches a hazard.I A hazard on its path is a safety threat.I The threat can only be assessed on close range.I Cars between ego-car and hazard can propagate a
warning.
ego-car hazard
r
r
Nils Müllner, Sibylle Fröschle, Martin Fränzle 3/13

Brief Problem Outline Practical Application Conclusion
Underlying question
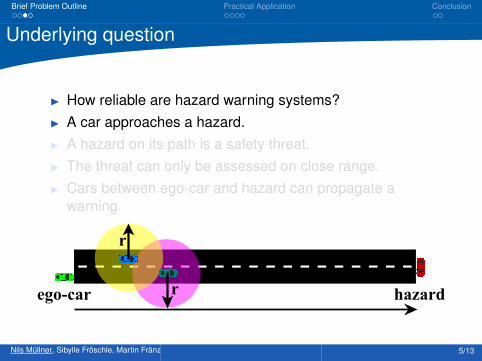
I How reliable are hazard warning systems?I A car approaches a hazard.I A hazard on its path is a safety threat.I The threat can only be assessed on close range.I Cars between ego-car and hazard can propagate a
warning.
ego-car hazard
r
r
Nils Müllner, Sibylle Fröschle, Martin Fränzle 3/13

Brief Problem Outline Practical Application Conclusion
Underlying question
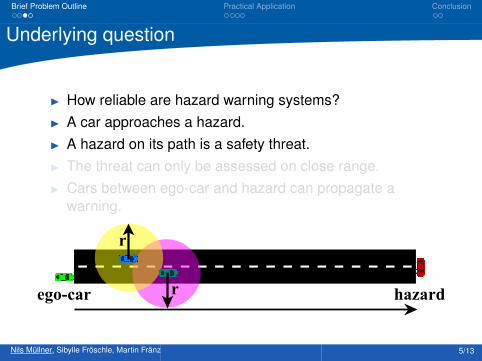
I How reliable are hazard warning systems?I A car approaches a hazard.I A hazard on its path is a safety threat.I The threat can only be assessed on close range.I Cars between ego-car and hazard can propagate a
warning.
ego-car hazard
r
r
Nils Müllner, Sibylle Fröschle, Martin Fränzle 3/13

Brief Problem Outline Practical Application Conclusion
Underlying question
I How reliable are hazard warning systems?I A car approaches a hazard.I A hazard on its path is a safety threat.I The threat can only be assessed on close range.I Cars between ego-car and hazard can propagate a
warning.
ego-car hazard
r
r
Nils Müllner, Sibylle Fröschle, Martin Fränzle 3/13
Brief Problem Outline Practical Application Conclusion
Underlying question
I How reliable are hazard warning systems?I A car approaches a hazard.I A hazard on its path is a safety threat.I The threat can only be assessed on close range.I Cars between ego-car and hazard can propagate a
warning.
ego-car hazard
r
r
Nils Müllner, Sibylle Fröschle, Martin Fränzle 3/13

Brief Problem Outline Practical Application Conclusion
Approach
Simulation:I specify fixed parameters: distance to hazard, velocity of
ego car, communication range of carsI specify dynamic parameters: velocity of other cars,
number of other carsI goal: determine how reliability depends on (dynamic)
parametersI reliability: successful relay of warning message via other
cars before ego car reaches safety threshold in front ofhazard (i.e. breaking distance)
Nils Müllner, Sibylle Fröschle, Martin Fränzle 4/13

Brief Problem Outline Practical Application Conclusion
Approach
Simulation:I specify fixed parameters: distance to hazard, velocity of
ego car, communication range of carsI specify dynamic parameters: velocity of other cars,
number of other carsI goal: determine how reliability depends on (dynamic)
parametersI reliability: successful relay of warning message via other
cars before ego car reaches safety threshold in front ofhazard (i.e. breaking distance)
Nils Müllner, Sibylle Fröschle, Martin Fränzle 4/13

Brief Problem Outline Practical Application Conclusion
Approach
Simulation:I specify fixed parameters: distance to hazard, velocity of
ego car, communication range of carsI specify dynamic parameters: velocity of other cars,
number of other carsI goal: determine how reliability depends on (dynamic)
parametersI reliability: successful relay of warning message via other
cars before ego car reaches safety threshold in front ofhazard (i.e. breaking distance)
Nils Müllner, Sibylle Fröschle, Martin Fränzle 4/13

Brief Problem Outline Practical Application Conclusion
Approach
Simulation:I specify fixed parameters: distance to hazard, velocity of
ego car, communication range of carsI specify dynamic parameters: velocity of other cars,
number of other carsI goal: determine how reliability depends on (dynamic)
parametersI reliability: successful relay of warning message via other
cars before ego car reaches safety threshold in front ofhazard (i.e. breaking distance)
Nils Müllner, Sibylle Fröschle, Martin Fränzle 4/13

Brief Problem Outline Practical Application Conclusion
Underlying question
I How reliable are hazard warning systems?I A car approaches a hazard.I A hazard on its path is a safety threat.I The threat can only be assessed on close range.I Cars between ego-car and hazard can propagate a
warning.
ego-car hazard
r
r
Nils Müllner, Sibylle Fröschle, Martin Fränzle 5/13
Brief Problem Outline Practical Application Conclusion
Underlying question
I How reliable are hazard warning systems?I A car approaches a hazard.I A hazard on its path is a safety threat.I The threat can only be assessed on close range.I Cars between ego-car and hazard can propagate a
warning.
ego-car hazard
r
r
Nils Müllner, Sibylle Fröschle, Martin Fränzle 5/13
Brief Problem Outline Practical Application Conclusion
Underlying question
I How reliable are hazard warning systems?I A car approaches a hazard.I A hazard on its path is a safety threat.I The threat can only be assessed on close range.I Cars between ego-car and hazard can propagate a
warning.
ego-car hazard
r
r
Nils Müllner, Sibylle Fröschle, Martin Fränzle 5/13

Brief Problem Outline Practical Application Conclusion
Underlying question
I How reliable are hazard warning systems?I A car approaches a hazard.I A hazard on its path is a safety threat.I The threat can only be assessed on close range.I Cars between ego-car and hazard can propagate a
warning.
ego-car hazard
r
r
Nils Müllner, Sibylle Fröschle, Martin Fränzle 5/13

Brief Problem Outline Practical Application Conclusion
Underlying question
I How reliable are hazard warning systems?I A car approaches a hazard.I A hazard on its path is a safety threat.I The threat can only be assessed on close range.I Cars between ego-car and hazard can propagate a
warning.
ego-car hazard
r
r
Nils Müllner, Sibylle Fröschle, Martin Fränzle 5/13

Brief Problem Outline Practical Application Conclusion
Approach
Simulation:I specify fixed parameters: distance to hazard, velocity of
ego car, communication range of carsI specify dynamic parameters: velocity of other cars,
number of other carsI goal: determine how reliability depends on (dynamic)
parametersI reliability: successful relay of warning message via other
cars before ego car reaches safety threshold in front ofhazard (i.e. breaking distance)
Nils Müllner, Sibylle Fröschle, Martin Fränzle 6/13

Brief Problem Outline Practical Application Conclusion
Approach
Simulation:I specify fixed parameters: distance to hazard, velocity of
ego car, communication range of carsI specify dynamic parameters: velocity of other cars,
number of other carsI goal: determine how reliability depends on (dynamic)
parametersI reliability: successful relay of warning message via other
cars before ego car reaches safety threshold in front ofhazard (i.e. breaking distance)
Nils Müllner, Sibylle Fröschle, Martin Fränzle 6/13
Brief Problem Outline Practical Application Conclusion
Approach
Simulation:I specify fixed parameters: distance to hazard, velocity of
ego car, communication range of carsI specify dynamic parameters: velocity of other cars,
number of other carsI goal: determine how reliability depends on (dynamic)
parametersI reliability: successful relay of warning message via other
cars before ego car reaches safety threshold in front ofhazard (i.e. breaking distance)
Nils Müllner, Sibylle Fröschle, Martin Fränzle 6/13

Brief Problem Outline Practical Application Conclusion
Approach
Simulation:I specify fixed parameters: distance to hazard, velocity of
ego car, communication range of carsI specify dynamic parameters: velocity of other cars,
number of other carsI goal: determine how reliability depends on (dynamic)
parametersI reliability: successful relay of warning message via other
cars before ego car reaches safety threshold in front ofhazard (i.e. breaking distance)
Nils Müllner, Sibylle Fröschle, Martin Fränzle 6/13

Brief Problem Outline Practical Application Conclusion
Three (+1) settings
1. How many trials are necessary to get resilient results?2. How does the velocity interval of other cars influence the
results?3. How does the communication range of cars influence
results?4. How does this all scale with the number of cars deployed
between ego-car and hazard?
Nils Müllner, Sibylle Fröschle, Martin Fränzle 7/13

Brief Problem Outline Practical Application Conclusion
Three (+1) settings
1. How many trials are necessary to get resilient results?2. How does the velocity interval of other cars influence the
results?3. How does the communication range of cars influence
results?4. How does this all scale with the number of cars deployed
between ego-car and hazard?
Nils Müllner, Sibylle Fröschle, Martin Fränzle 7/13

Brief Problem Outline Practical Application Conclusion
Three (+1) settings
1. How many trials are necessary to get resilient results?2. How does the velocity interval of other cars influence the
results?3. How does the communication range of cars influence
results?4. How does this all scale with the number of cars deployed
between ego-car and hazard?
Nils Müllner, Sibylle Fröschle, Martin Fränzle 7/13

Brief Problem Outline Practical Application Conclusion
Three (+1) settings
1. How many trials are necessary to get resilient results?2. How does the velocity interval of other cars influence the
results?3. How does the communication range of cars influence
results?4. How does this all scale with the number of cars deployed
between ego-car and hazard?
Nils Müllner, Sibylle Fröschle, Martin Fränzle 7/13

Brief Problem Outline Practical Application Conclusion
Setting 1: The necessary number of trials
20 30 40 50 60 70 80 90 1000
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1probabilitydofdwarningdsuccessdvs.dnumberdofdcars
numberdofdcars
pro
bab
ilit
ydof
dtim
elyd
war
nin
g
20 30 40 50 60 70 80 90 1000
10
20
30
40
50
60
70
80
90meandwarningddistanced(ifdsuccess)dvs.dnumberdofdcars
numberdofdcars
mea
ndw
arn
ingd
dis
tan
ce
Figure: 10 trials
Nils Müllner, Sibylle Fröschle, Martin Fränzle 8/13

Brief Problem Outline Practical Application Conclusion
Setting 1: The necessary number of trials
20 30 40 50 60 70 80 90 1000
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1probabilitydofdwarningdsuccessdvs.dnumberdofdcars
numberdofdcars
pro
bab
ilit
ydof
dtim
elyd
war
nin
g
20 30 40 50 60 70 80 90 1000
10
20
30
40
50
60
70
80
90
100meandwarningddistanced(ifdsuccess)dvs.dnumberdofdcars
numberdofdcars
mea
ndw
arn
ingd
dis
tan
ce
Figure: 1.000 trials
Nils Müllner, Sibylle Fröschle, Martin Fränzle 8/13

Brief Problem Outline Practical Application Conclusion
Setting 1: The necessary number of trials
20 30 40 50 60 70 80 90 1000
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1probabilitydofdwarningdsuccessdvs.dnumberdofdcars
numberdofdcars
pro
bab
ilit
ydof
dtim
elyd
war
nin
g
20 30 40 50 60 70 80 90 1000
10
20
30
40
50
60
70meandwarningddistanced(ifdsuccess)dvs.dnumberdofdcars
numberdofdcars
mea
ndw
arn
ingd
dis
tan
ce
Figure: 100.000 trials
Nils Müllner, Sibylle Fröschle, Martin Fränzle 8/13

Brief Problem Outline Practical Application Conclusion
Setting 2: The velocity interval
20 30 40 50 60 70 80 90 1000
20
40
velocityNintervalN[0.5,1.5]
numberNofNcarsNaN
Nsta
nd
ard
Ndev
iati
on
20 30 40 50 60 70 80 90 1000
20
40
velocityNintervalN[0.7,1.3]
numberNofNcars
NaN
Nsta
nd
ard
Ndev
iati
on
20 30 40 50 60 70 80 90 1000
20
40
velocityNintervalN[0.9,1.1]
number of carsNaN
Nsta
nd
ard
Ndev
iati
on
Nils Müllner, Sibylle Fröschle, Martin Fränzle 9/13

Brief Problem Outline Practical Application Conclusion
Setting 3: The communication range
0 10 20 30 40 50 60 70 80 90 1000
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
number of cars
pro
bab
ilit
y fo
r ti
mel
y w
arn
ing
r = 3r = 4r = 5r = 6r = 7
Nils Müllner, Sibylle Fröschle, Martin Fränzle 10/13

Brief Problem Outline Practical Application Conclusion
Lessons learned
I Number of simulations should not be fixed.I The velocity interval has minor influence on results.I The radio range has major influence on results.I The number of cars need a critical mass based on other
parameters for warning mechanisms to be effective.
Nils Müllner, Sibylle Fröschle, Martin Fränzle 11/13

Brief Problem Outline Practical Application Conclusion
Lessons learned
I Number of simulations should not be fixed.I The velocity interval has minor influence on results.I The radio range has major influence on results.I The number of cars need a critical mass based on other
parameters for warning mechanisms to be effective.
Nils Müllner, Sibylle Fröschle, Martin Fränzle 11/13

Brief Problem Outline Practical Application Conclusion
Lessons learned
I Number of simulations should not be fixed.I The velocity interval has minor influence on results.I The radio range has major influence on results.I The number of cars need a critical mass based on other
parameters for warning mechanisms to be effective.
Nils Müllner, Sibylle Fröschle, Martin Fränzle 11/13

Brief Problem Outline Practical Application Conclusion
Lessons learned
I Number of simulations should not be fixed.I The velocity interval has minor influence on results.I The radio range has major influence on results.I The number of cars need a critical mass based on other
parameters for warning mechanisms to be effective.
Nils Müllner, Sibylle Fröschle, Martin Fränzle 11/13

Brief Problem Outline Practical Application Conclusion
Future work
I Employ Hoeffding to determine number of simulations.I Switch to SUMO & OMNET++ for better traffic simulation.I Determine security weak spots caused by unequal
distributions (e.g. traffic backlog).I Tackle larger and realistic scenarios.
Nils Müllner, Sibylle Fröschle, Martin Fränzle 12/13

Brief Problem Outline Practical Application Conclusion
Future work
I Employ Hoeffding to determine number of simulations.I Switch to SUMO & OMNET++ for better traffic simulation.I Determine security weak spots caused by unequal
distributions (e.g. traffic backlog).I Tackle larger and realistic scenarios.
Nils Müllner, Sibylle Fröschle, Martin Fränzle 12/13

Brief Problem Outline Practical Application Conclusion
Future work
I Employ Hoeffding to determine number of simulations.I Switch to SUMO & OMNET++ for better traffic simulation.I Determine security weak spots caused by unequal
distributions (e.g. traffic backlog).I Tackle larger and realistic scenarios.
Nils Müllner, Sibylle Fröschle, Martin Fränzle 12/13
Brief Problem Outline Practical Application Conclusion
Future work
I Employ Hoeffding to determine number of simulations.I Switch to SUMO & OMNET++ for better traffic simulation.I Determine security weak spots caused by unequal
distributions (e.g. traffic backlog).I Tackle larger and realistic scenarios.
Nils Müllner, Sibylle Fröschle, Martin Fränzle 12/13

Brief Problem Outline Practical Application Conclusion
Questions?
Nils Müllner, Sibylle Fröschle, Martin Fränzle 13/13