enabling advanced automation tools to manage trajectory ... · copyright © 2017 boeing. all rights...
TRANSCRIPT

Copyright © 2017 Boeing. All rights reserved.
Engineering, Test & TechnologyBoeing Research & Technology
Enabling Advanced Automation Tools to manage Trajectory
Prediction Uncertainty
Enrique Casado 24/10/2017| | 1
ART 12 - AutomationEnrique Casado (BR&T-E)
Frequentis, Vienna, Austria, October 24th, 2017

Copyright © 2017 Boeing. All rights reserved.
Boeing Research & Technology | COPTRA
Enrique Casado 24/10/2017| | 2
Outline
Introduction
Trajectory Prediction Framework
Uncertainty Quantification
Polynomial Chaos Theory
Case Study
Conclusions & Remarks

Copyright © 2017 Boeing. All rights reserved.
Boeing Research & Technology | COPTRA
Enrique Casado 24/10/2017| | 3
Introduction
• Ground-based automation tools rely on the capability of accurately predicting the traffic flow within an airspace such as that prediction enable the provision of expected safety and efficiency.
• Nowadays the trajectory prediction process is set as a deterministic process, although the nature of required inputs is intrinsically stochastic .
• Due to the underestimation of the stochastic behavior of the trajectory prediction inputs, current systems usually do not provide with reliable predictions.
How could advance automation tools manage stochastic prediction in an efficient manner so that prediction reliability
is increased and enhanced features become available?
Copyright © 2017 Boeing. All rights reserved.
Boeing Research & Technology | COPTRA
Trajectory Prediction Framework
Enrique Casado 24/10/2017| | 4
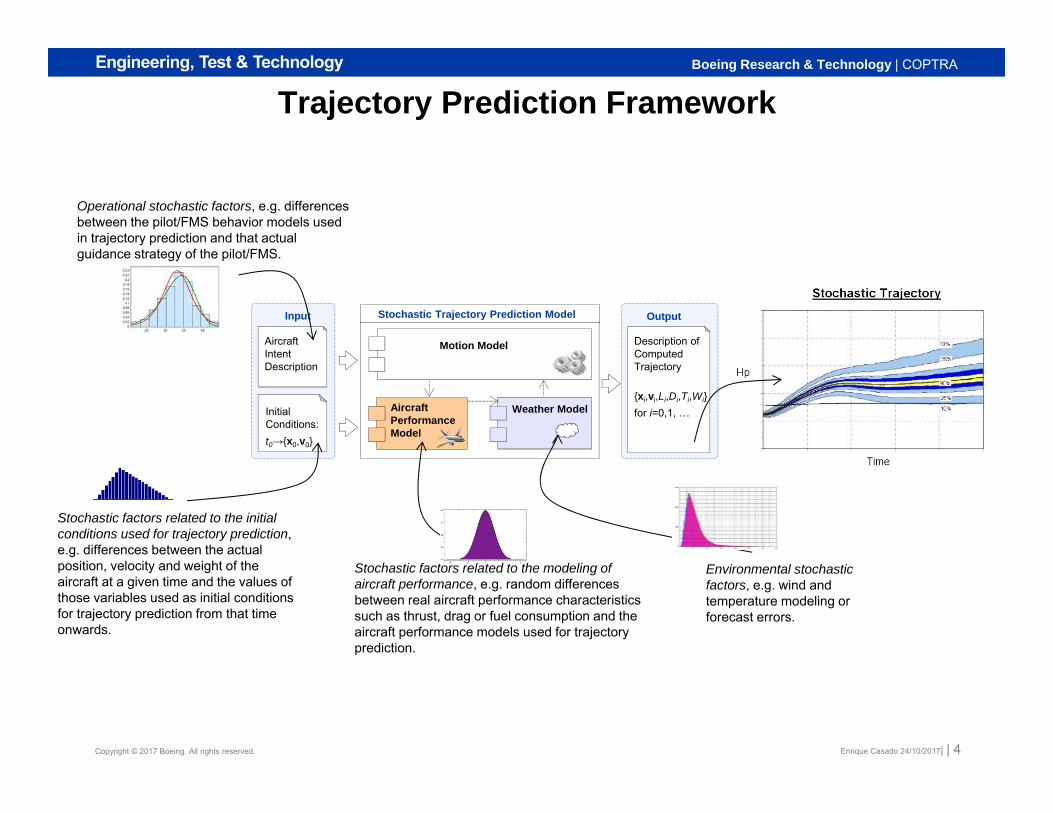
Input Stochastic Trajectory Prediction Model
Aircraft Intent Description
Initial Conditions:t0→{x0,v0}
Aircraft Performance Model
Weather Model
Motion Model
Output
Description of Computed Trajectory
{xi,vi,Li,Di,Ti,Wi}for i=0,1, …
Stochastic factors related to the initial conditions used for trajectory prediction, e.g. differences between the actual position, velocity and weight of the aircraft at a given time and the values of those variables used as initial conditions for trajectory prediction from that time onwards.
Stochastic factors related to the modeling of aircraft performance, e.g. random differences between real aircraft performance characteristics such as thrust, drag or fuel consumption and the aircraft performance models used for trajectory prediction.
Environmental stochastic factors, e.g. wind and temperature modeling or forecast errors.
Operational stochastic factors, e.g. differences between the pilot/FMS behavior models used in trajectory prediction and that actual guidance strategy of the pilot/FMS.
Copyright © 2017 Boeing. All rights reserved.
Boeing Research & Technology | COPTRA
Uncertainty Quantification
Enrique Casado 24/10/2017| | 5
Input
Aircraft Intent Description
Initial Conditions:t0→{x0,v0}
Aircraft Performance Model
Weather Model
Motion Model
Output
Description of Computed Trajectory
{xi,vi,Li,Di,Ti,Wi}for i=0,1, …
0 200 400 600 800 1000 1200 1400150
200
250
300
350
time [sec]0 200 400 600 800 1000 1200 1400
150
200
250
300
350
time [sec]0 200 400 600 800 1000 1200 1400
150
200
250
300
350
time [sec]0 200 400 600 800 1000 1200 1400
150
200
250
300
350
time [sec]0 200 400 600 800 1000 1200 1400
150
200
250
300
350
time [sec]
0 200 400 600 800 1000 1200 1400150
200
250
300
350
time [sec]0 200 400 600 800 1000 1200 1400
150
200
250
300
350
time [sec]0 200 400 600 800 1000 1200 1400
150
200
250
300
350
time [sec]0 200 400 600 800 1000 1200 1400
150
200
250
300
350
time [sec]0 200 400 600 800 1000 1200 1400
150
200
250
300
350
time [sec]
0 200 400 600 800 1000 1200 1400150
200
250
300
350
time [sec]0 200 400 600 800 1000 1200 1400
150
200
250
300
350
time [sec]0 200 400 600 800 1000 1200 1400
150
200
250
300
350
time [sec]0 200 400 600 800 1000 1200 1400
150
200
250
300
350
time [sec]0 200 400 600 800 1000 1200 1400
150
200
250
300
350
time [sec]
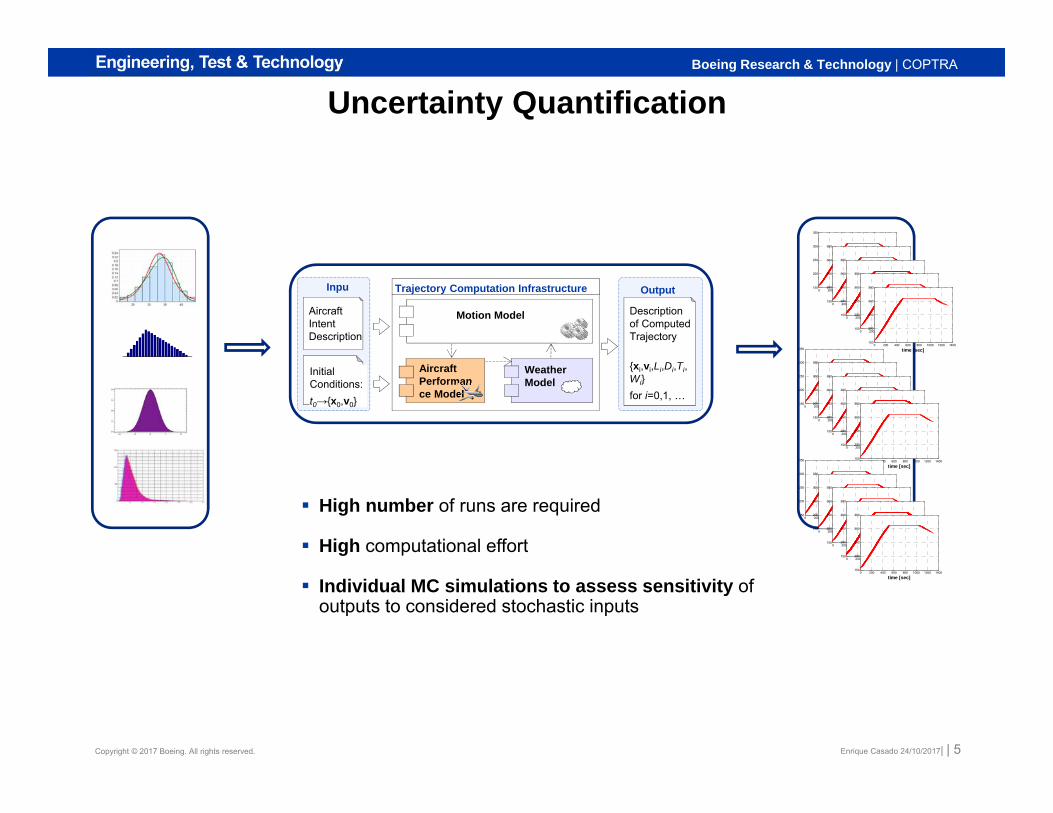
High number of runs are required
High computational effort
Individual MC simulations to assess sensitivity of outputs to considered stochastic inputs
Trajectory Computation Infrastructure
Copyright © 2017 Boeing. All rights reserved.
Boeing Research & Technology | COPTRA
Uncertainty Quantification
Enrique Casado 24/10/2017| | 6
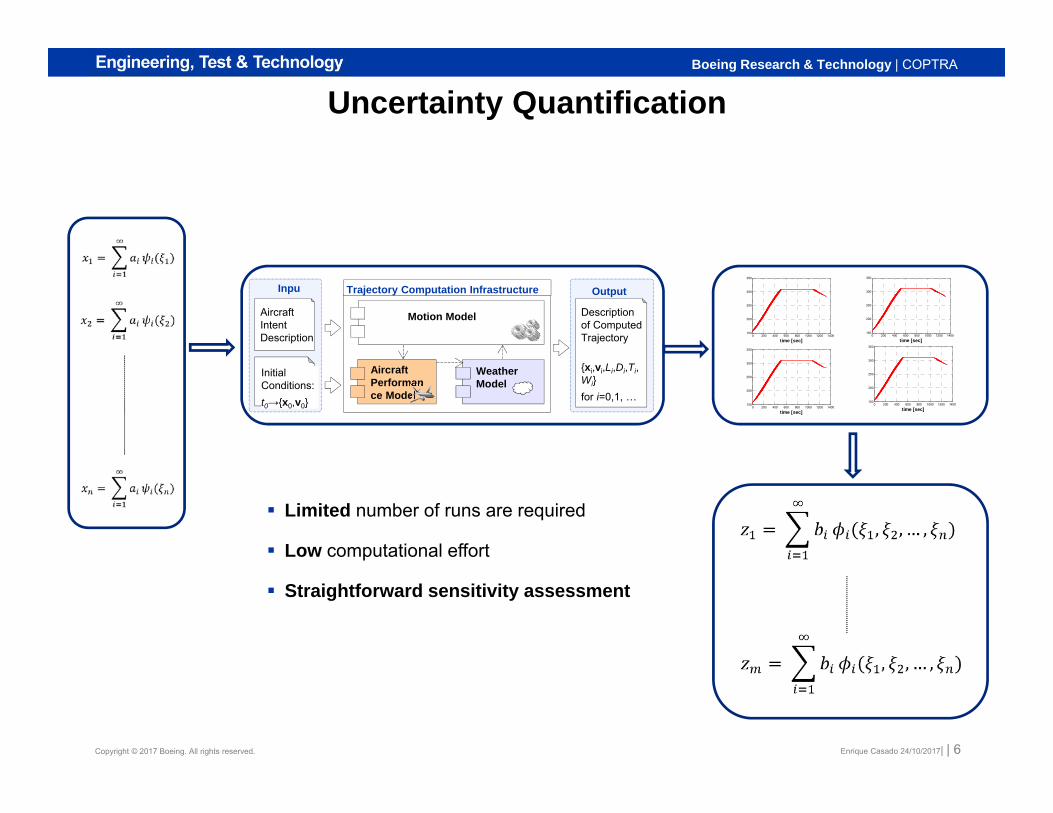
Input
Trajectory Computation Infrastructure
Aircraft Intent Description
Initial Conditions:t0→{x0,v0}
Aircraft Performance Model
Weather Model
Motion Model
Output
Description of Computed Trajectory
{xi,vi,Li,Di,Ti,Wi}for i=0,1, …
0 200 400 600 800 1000 1200 1400150
200
250
300
350
time [sec]
0 200 400 600 800 1000 1200 1400150
200
250
300
350
time [sec]
0 200 400 600 800 1000 1200 1400150
200
250
300
350
time [sec]
0 200 400 600 800 1000 1200 1400150
200
250
300
350
time [sec]
Limited number of runs are required
Low computational effort
Straightforward sensitivity assessment

Copyright © 2017 Boeing. All rights reserved.
Boeing Research & Technology | COPTRA
E. Casado, 24/10/2017 | 7
Polynomial Chaos Theory (I)
Application of Polynomial Chaos Expansions (PCE) to quantify the propagation of uncertainty indynamic systems.
Technique extensively applied in several fields: aerodynamic design, vehicle dynamics, micro-electromechanical systems, petroleum engineering, nuclear waste disposal, etc.
The system response u can be represented as a function of the variability ξ of the inputs x withthe time t
Two approaches to obtain u:
• Intrusive Method, which requires thestochastic formulation of the original model
• Non-Intrusive Method, which requires a set ofdeterministic solutions of the original model

Copyright © 2017 Boeing. All rights reserved.
Boeing Research & Technology | COPTRA
E. Casado, 24/10/2017 | 8
Polynomial Chaos Theory (II)
Copyright © 2017 Boeing. All rights reserved.
Boeing Research & Technology | COPTRA
Enrique Casado 24/10/2017 | 9
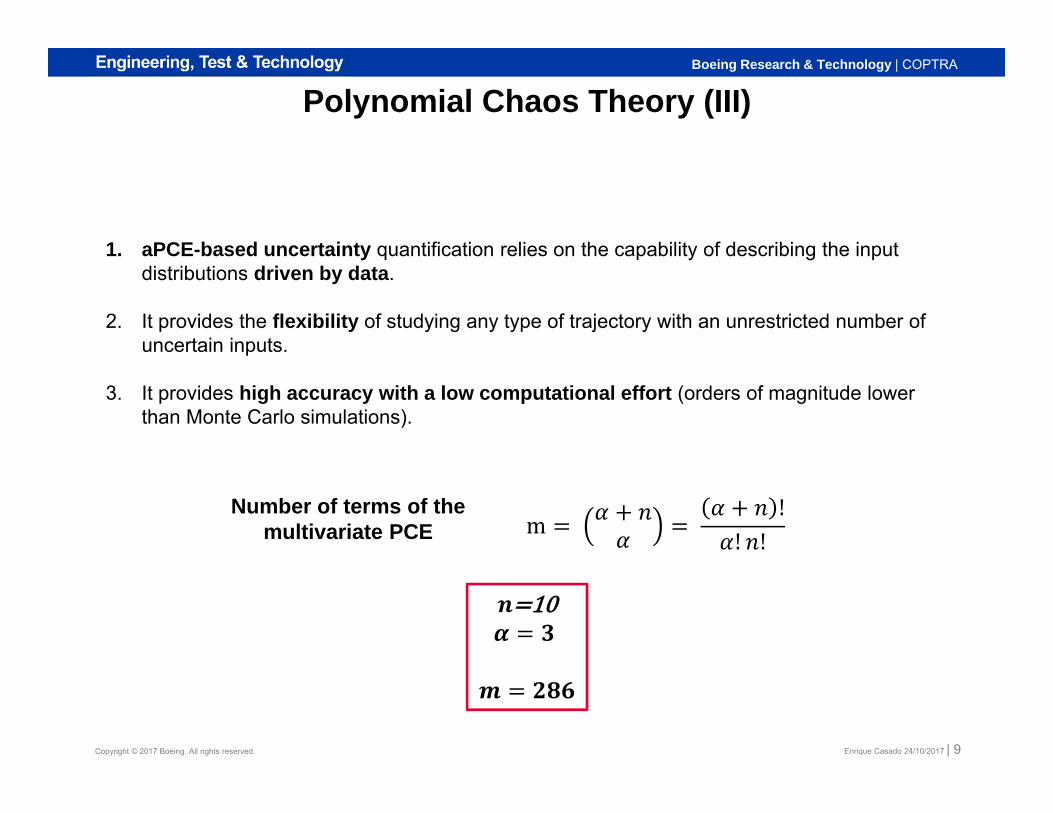
1. aPCE-based uncertainty quantification relies on the capability of describing the input distributions driven by data.
2. It provides the flexibility of studying any type of trajectory with an unrestricted number of uncertain inputs.
3. It provides high accuracy with a low computational effort (orders of magnitude lower than Monte Carlo simulations).
Number of terms of the multivariate PCE m
!! !
Polynomial Chaos Theory (III)
10

Copyright © 2017 Boeing. All rights reserved.
Boeing Research & Technology | COPTRA
Enrique Casado 24/10/2017 | 10
One-dimensional PCE Multi-dimensional PCE
Ψ
mean Ψ
std Ψ
Ψ ,… , Φ , … ,
Φ ∏ , … ,
1, … ,
Polynomial Chaos Theory (IV)

Copyright © 2017 Boeing. All rights reserved.
Boeing Research & Technology | COPTRA
Enrique Casado 24/10/2017 | 11
Case Study (I)

Copyright © 2017 Boeing. All rights reserved.
Boeing Research & Technology | COPTRA
Enrique Casado 24/10/2017 | 12
STOCHASTIC FACTORS TO BE CONSIDERED
Take-off time
Take-off weight
Cruise Mach speed
Cruise Altitude
Capturing bearing
Descent speed
Top of Descent (TOD) Location
Weather
Individual Uncertainties are described by different probability density functions
APM (drag and fuel consumption coefficients)
Case Study (II)
Copyright © 2017 Boeing. All rights reserved.
Boeing Research & Technology | COPTRA
Enrique Casado 24/10/2017 | 13
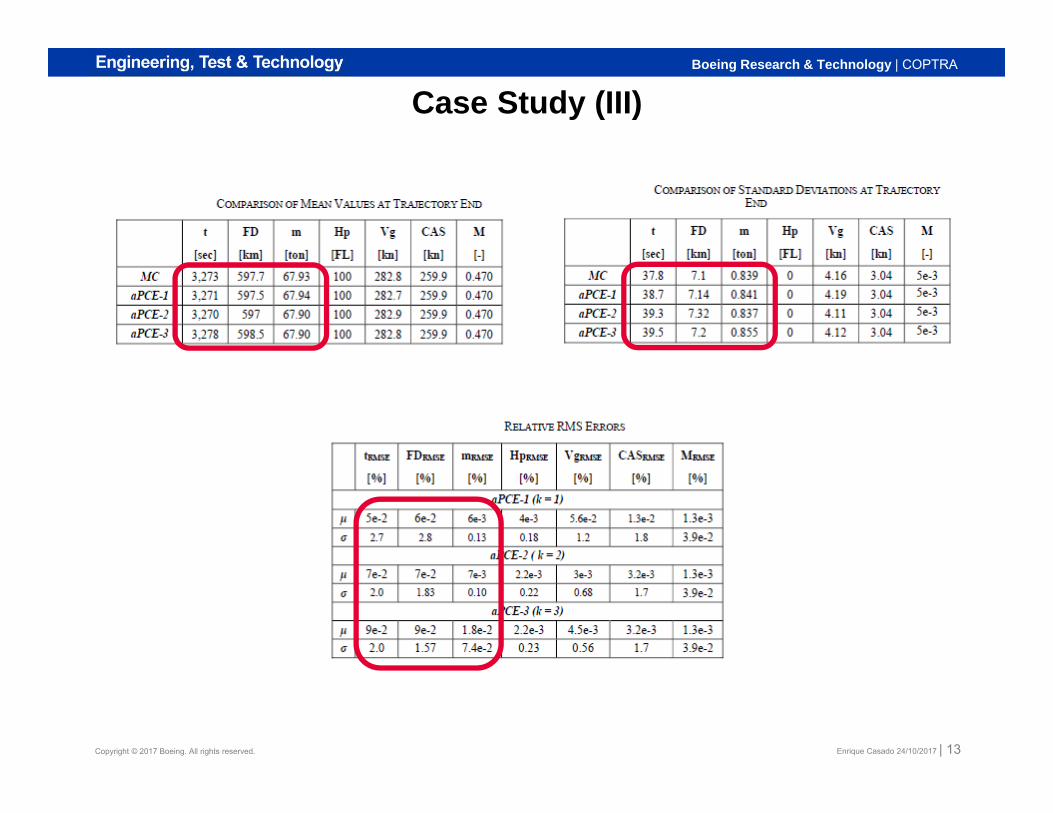
Case Study (III)

Copyright © 2017 Boeing. All rights reserved.
Boeing Research & Technology | COPTRA
Enrique Casado 24/10/2017 | 14
Number of runs required to compute the multivariate PCE
m !
! !
10
Case Study (IV)
Copyright © 2017 Boeing. All rights reserved.
Boeing Research & Technology | COPTRA
Conclusions & Remarks
Enrique Casado 24/10/2017 | 15
• aPCE-based uncertainty quantification provides the flexibility of studying the influence of an unrestricted number of uncertain inputs.
• It relies on the capability of describing the input distributions driven by data.
• It provides high reliable uncertainty quantification with a low computational effort (orders of magnitude lower than Monte Carlo simulations).
• Applicable to all Trajectory Prediction tools without requiring any modification of the native implementation.
• It could enable enhanced robust ATM capabilities by the provision of analytical descriptions of the trajectory prediction uncertainty.
Copyright © 2017 Boeing. All rights reserved.
Copyright © 2017 Boeing. All rights reserved.
Boeing Research & Technology | COPTRA
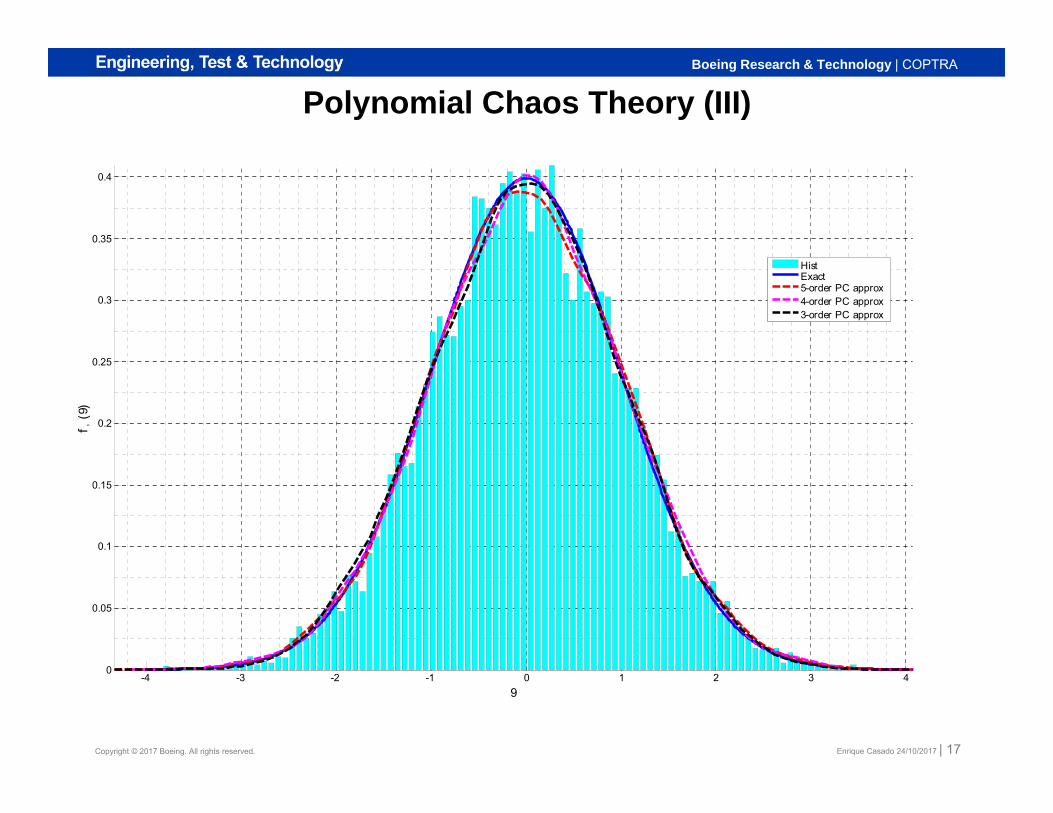
Polynomial Chaos Theory (III)
Enrique Casado 24/10/2017 | 17
-4 -3 -2 -1 0 1 2 3 40
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
9
f ,(9
)
HistExact5-order PC approx4-order PC approx3-order PC approx
Copyright © 2017 Boeing. All rights reserved.
Boeing Research & Technology | COPTRA
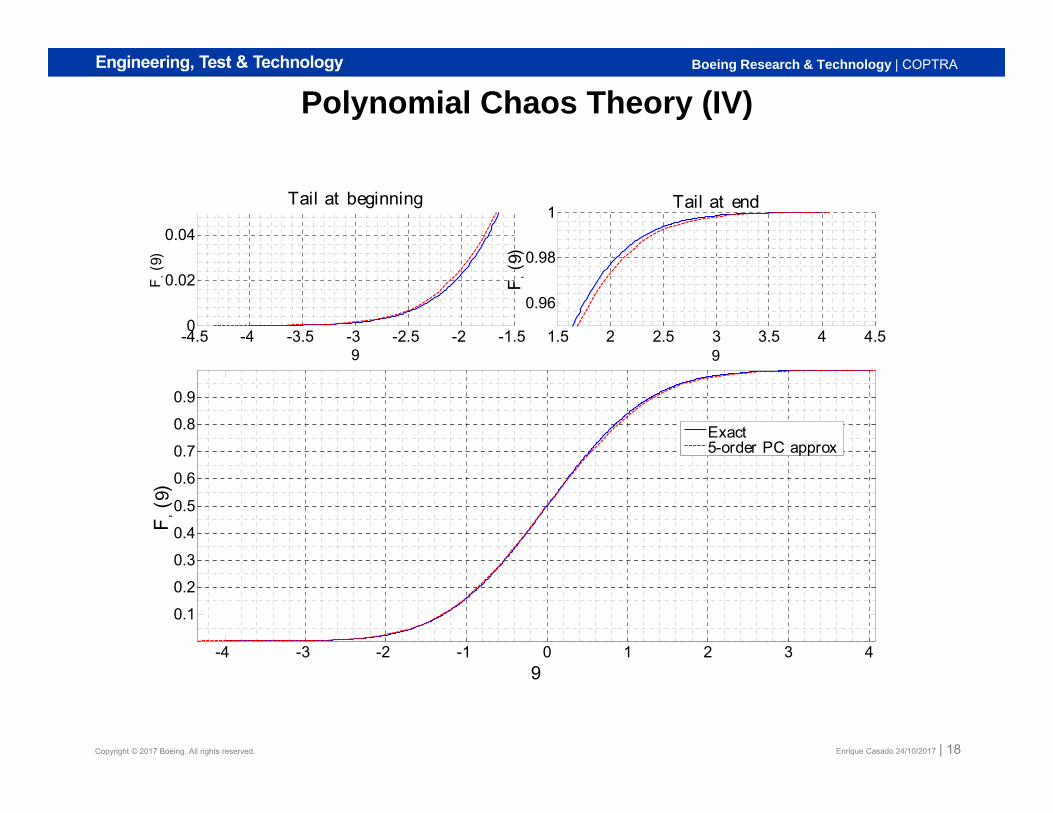
Polynomial Chaos Theory (IV)
Enrique Casado 24/10/2017 | 18
-4.5 -4 -3.5 -3 -2.5 -2 -1.50
0.02
0.04
9
F ,( 9
)
Tail at beginning
1.5 2 2.5 3 3.5 4 4.5
0.96
0.98
1
9
F ,( 9
)
Tail at end
-4 -3 -2 -1 0 1 2 3 4
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
9
F ,( 9
)
Exact5-order PC approx

Copyright © 2017 Boeing. All rights reserved.
Boeing Research & Technology | COPTRA
What is different from other algorithms
Enrique Casado 09/10/2017| | 19
Copyright © 2017 Boeing. All rights reserved.
Boeing Research & Technology | COPTRA
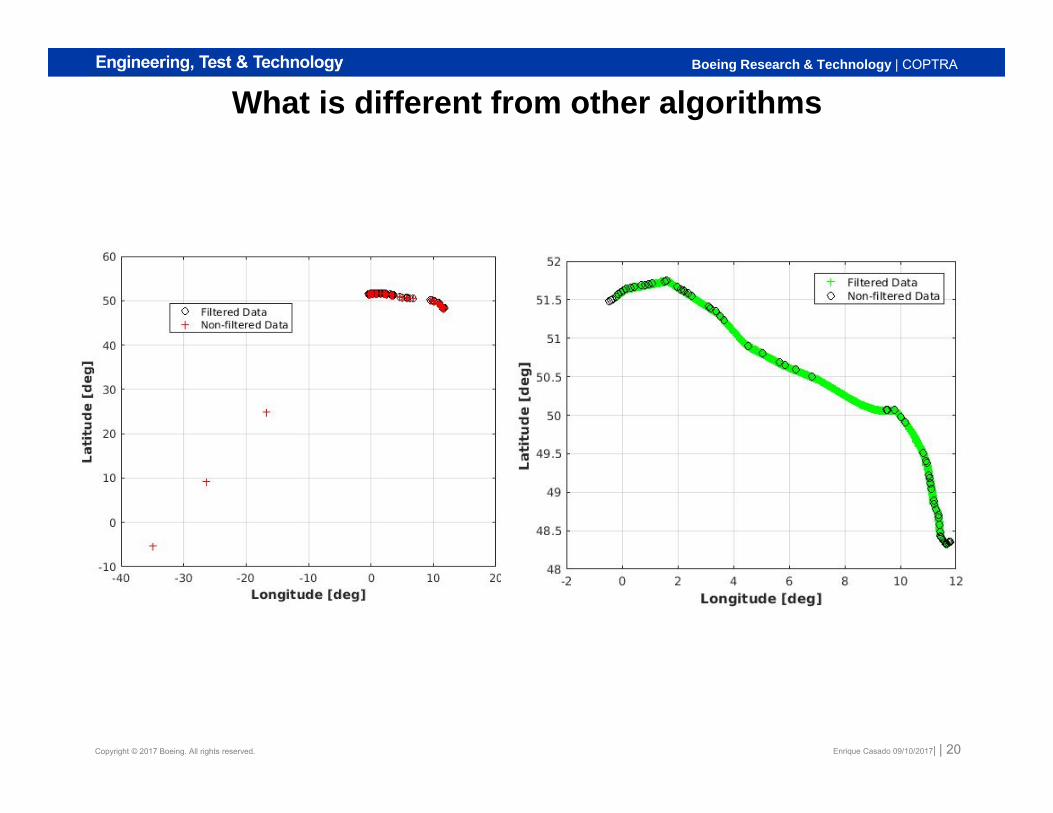
What is different from other algorithms
Enrique Casado 09/10/2017| | 20

Copyright © 2017 Boeing. All rights reserved.
Boeing Research & Technology | COPTRA
What is different from other algorithms
Enrique Casado 09/10/2017| | 21

Copyright © 2017 Boeing. All rights reserved.
Boeing Research & Technology | COPTRA
What is different from other algorithms
Enrique Casado 09/10/2017| | 22