em210 linux user manual - boardcon embedded design manual/em210_lin… · em210 linux user manual...
TRANSCRIPT

www.armdesigner.com
EM210 Linux User Manual
EM210 Linux User Manual V1.2
Date:2014-10-10
www.armdesigner.com

www.armdesigner.com
EM210 Linux User Manual 2
Index
1. Features ............................................................................................................................................3
2. Hardware Introduction .....................................................................................................................3
2.1 Hardware interface.................................................................................................................4
2.2 Set boot mode.........................................................................................................................4
3. Software Introduction ......................................................................................................................5
3.1 Version ...................................................................................................................................5
3.2 Linux Features........................................................................................................................5
4. Compiler Environment.....................................................................................................................6
4.1 Vmwa re7.0+ubuntu10.04......................................................................................................6
4.2 Install the Cross Compile toolchain .......................................................................................6
5. Compile the Source..........................................................................................................................6
5.1 Compile u–boot......................................................................................................................6
5.2 Compile kernel .......................................................................................................................6
5.3 Generate the root file system(ext2) ........................................................................................7
6. Burn images to iNand ......................................................................................................................8
6.1 Burn uboot.bin to iNand when there have no uboot.bin in iNand..........................................8
6.2 burn kernel and system.........................................................................................................24

www.armdesigner.com
EM210 Linux User Manual 3
1. Features
• Processor: Samsung ARM Cortex-A8 S5PV210AH, up to 1GHz
• Memory: 512MB DDR2
• Flash: 4GB emmc iNand
• Supporting 2D graphics acceleration, up to 160Mpixels/s, maximum resolution 8000*8000
• Supporting 3D graphics acceleration(Power VR SGX540)
• Monolithic integrated power management chip
• Supporting 4.3 inch, 7 inch, 10.1 inch resistive touch screen
• Supporting GPS, WCDMA, Camera, WIFI , RFID
• 3.1Mega pixels Camera
• Supporting Cramfs/ramfs/ext3/fat32/nfs
• System parameters can be saved in REGEDIT, and residual Flash can be read and written
• The system can be updated via USB interface.
• Supporting qtopia-2.2.0
• Dimensions: Carrier board-108mm×141mm; CPU board- 60mm×60mm
2. Hardware Introduction

www.armdesigner.com
EM210 Linux User Manual 4
2.1 Hardware interface
Feature Specifications
CPU
Samsung ARM Cortex-A8 S5PV210AH, 1GHz System Clock
Supporting NEON instruction
Supporting MPEG-4, MPEG2, H.264/H263, VC-1 and DivX video codec
Supporting 2D graphics acceleration, maximum resolution 8000*8000
Supporting 3D graphics acceleration(Power VR SGX540)
Memory Default mounted 512MB DDR2
iNand Samsung KLM4G1FE3B, 4GB iNand
Power 5V power supply for CPU board
CPU Board Dimension 60mm×60mm
Serial Ports
(UARTs)
COM-0, five-wire DB9 RS232 serial port
COM-1, four-wire RJ11 serial port
COM-2, four-wire RJ11 serial port
Resistor Touch Screen: The board supports driver for 4.3", 7", 10.1",
15"(1024*768) TFT LCD LCD
Capacitive Touch Screen: The board supports driver for 4.3" and 7"
Ethernet 10M/100M High performance Ethernet, RJ45 interface
USB 2 × USB Host2.0, 1 × USB2.0 OTG
Camera 1 × 20-pin 310Megapixels CMOS camera interface
JTAG 1 × 10-pin JTAG Port
Mouse Mouse working via USB
Keyboard 6*7 Keypad interface, alternative module
Audio codec Adopt WM9713 Audio chip, Audio I / O interface
RTC Real Time Clock, powered by external lithium battery
SD card 1 × T-Flash card, 1 × SIM card slot
General Purpose I/O 1 × 30-pin SPI Expansion Connector
Buttons 6 Programmable User Buttons
WIFI 802.11 b/g/n, alternative module
WCDMA Supporting GSM card make calls, send messages, alternative module
GPS Built-in non-directional antenna, alternative module
Carrier board
Dimension 108mm×141mm
2.2 Set boot mode
EM210 provide a variety of boot mode, can be set by DIP switch. Currently we only use USB boot
mode and iNAND boot mode. Set as follows:

www.armdesigner.com
EM210 Linux User Manual 5
Boot Mode J1 J2 J3 J4 J5 J6
iNAND ON ON OFF OFF ON ON
USB OFF ON ON ON OFF ON
3. Software Introduction
3.1 Version
1.Bootloader: u-boot 1.3.4
2.Kernel: linux 3.0.8
3. qtopia-2.2.0
4. Cross Compile toolchain: arm-2009q3
3.2 Linux Features
•LCD driver
•LCD backlight driver
•Resistive touch screen driver
•HDMI driver
•HSMMC/SD/MMC/SDIO drvier
•IIC driver
•IIS driver
•KEYBD driver
•Audio driver,supprot AC97 and IIS
•DMA driver
•RTC driver
•USB HOST/DEVICE driver
•JPEG hardware codec driver
•MFC multimedia hardware codec driver(supports MPEG-4/MPEG2, H.264/263,VC-1,DivX and
other formats)
•CMOS/CCD Camera driver
•2D hardware acceleration driver
•3D hardware acceleration driver
•Ethernet driver
•SD card driver(the maximum capacity 32G)
•3G driver
•SDIO WIFI driver
•BT driver
•Capacitive touch screen driver
•Power management driver

www.armdesigner.com
EM210 Linux User Manual 6
4. Compiler Environment
4.1 Vmwa re7.0+ubuntu10.04
Install Vmware7.0 in windows OS , and then install ubuntu10.04 in vmware to compile. You can see
the installing steps in the initial version.
4.2 Install the Cross Compile toolchain
cross compile toolchain version: arm -2009q3
location: Tools\linux
You had better install the cross compile toolchain to /usr/local/arm/ ( The makefile
have designated the directory in the source ).
User also can install other versions of the tool chain according your demand.You can
reference to the following installing steps:
# mkdir /usr/local/arm
# tar xvjf arm-2009q3.tar.bz2 –C /usr/local/arm
# gedit /etc/bash.bashrc
Add the following information in the end of “bash.bahshrc”:
PATH=/usr/local/arm/arm-2009q3/bin:$PATH
Export PATH
Save “bash.bashrc” and execute the following command to set a default cross-compiler:
#source /etc/ bash.bashrc
Execute the following command to check if the cross-compiler has been installed successfully and
check the revised version:
# arm-linux-gcc -v
5. Compile the Source
5.1 Compile u–boot
u-boot.bin is mainly used to guide and start the kernel .The steps of compiling:
# tar xvf uboot_smdkv210-Boardcon_V6_iNand.tar.gz
# cd uboot_smdkv210-Boardcon
# make distclean
# make smdkv210single_config
# make
If it is ok, you can get the u-boot. bin in the current path.
5.2 Compile kernel
There is em210.config file which we had configured in the kernel source folder,and you can use
directly, the default LCD is 7 inch. The steps of compiling:
# tar xvf kernel_V6.0_iNand.tar.gz
# cd kernel
# make distclean

www.armdesigner.com
EM210 Linux User Manual 7
# cp EM210_iNand_config .config
# make
If it is ok,you can get the zImage file in the arch/arm/boot folder.
5.3 Generate the root file system(ext2)
1、generate the genext2fs command
# sudo tar xvf genext2fs-1.4.1 .tar.gz
# cd genext2fs-1.4.1
# ./configure
# make
# make install
Now the genext2fs will be generated in current directory,as follow:
2、Edit script(the script is in \Linux\Tools\linux directory)
#!/bin/bash
num_blocks=`du –sk /home/zgf/Desktop/210/system | tail -n1 | awk '{print $1;}'`
if [ $num_blocks -lt 20480 ]; then
extra_blocks=3072;
else
extra_blocks=20480;
fi
num_blocks=`expr $num_blocks + $extra_blocks`
num_inodes=`find /home/zgf/Desktop/210/system | wc -l`
num_inodes=`expr $num_inodes + 500`
/home/zgf/Desktop/genext2fs -d /home/zgf/Desktop/210/system -b $num_blocks -N $num_inodes
-m 0 /nfsboot/system.img
tune2fs -L system /nfsboot/system.img
tune2fs -C 1 /nfsboot/system.img
tune2fs -O rw /nfsboot/system.img
e2fsck -fy /nfsboot/system.img

www.armdesigner.com
EM210 Linux User Manual 8
Note: the red part needs to be changed to your own the corresponding file system, the file system
name should be change to system.Blue command is your first step to do the command position.
Give permission to execute, execute the following command:
# sudo chmod +x install.sh
3、unzip the file system source code package and generate the file system of ext2 format
# sudo tar xvf system.tar.gz
# sudo ./install.sh
Now system.img is in directory nfsboot,you can burn it to the development board and then start the
system.
6. Burn images to iNand
6.1 Burn uboot.bin to iNand when there have no uboot.bin in iNand.
Step 1:
Set EM210 board to USB boot mode.
The boot mode configuration:
Boot Mode J1 J2 J3 J4 J5 J6
iNAND ON ON OFF OFF ON ON
USB OFF ON ON ON OFF ON
Step 2:
EM210 board connect 5V adapter, serial cable, USB cable (between EM210 USB OTG port and
PC).
Step 3:
Power on EM210 board. The PC will report that found new hardware if your PC have not ever
install this usb drive(Tools\windows\usb_download_driver),install the driver as followings,

www.armdesigner.com
EM210 Linux User Manual 9
Click “next” and select tools/windows/usb_download_driver director.

www.armdesigner.com
EM210 Linux User Manual 10

www.armdesigner.com
EM210 Linux User Manual 11
Click “Browse” and select tools/windows/usb_download_driver/secusb2.sys.
Click “Open” and then clilck “OK”.

www.armdesigner.com
EM210 Linux User Manual 12
Now,the USB download driver is installed successfully.

www.armdesigner.com
EM210 Linux User Manual 13
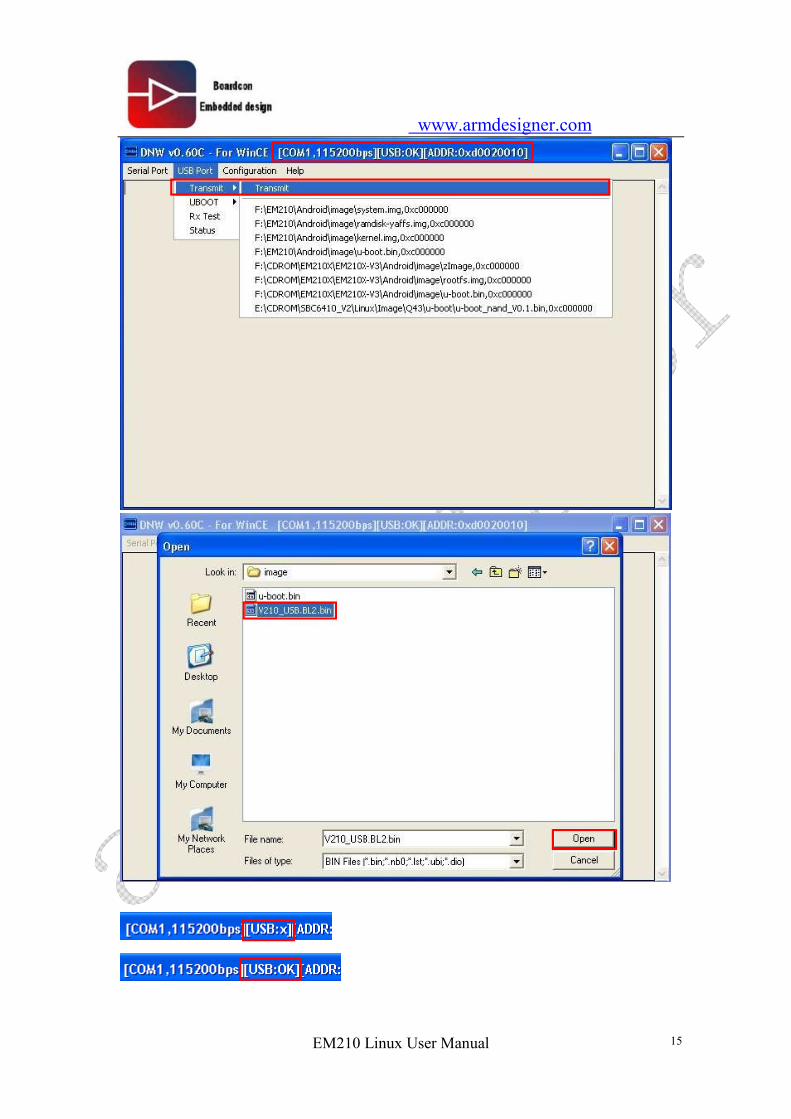
Step 4:
Open DNW(Tools\windows\dnw\dnw.exe)
Serial Port->connect: to connect EM210 serial console
configuration->options: to set USB Port download address:0xd0020010
This time on the top of DNW window will show:
[COM1:115200bps][USB:OK] [ADDR:0xd0020010]
Then lunch USB Port->transmit:transmit to download images\V210_USB.BL2.bin to EM210 RAM.
notice:
All the images and tool cmd.exe(include V210_USB.BL2.bin ,u-boot.bin,zImage-7inch_R and
system.img) are stored in the directory \Linux\Images
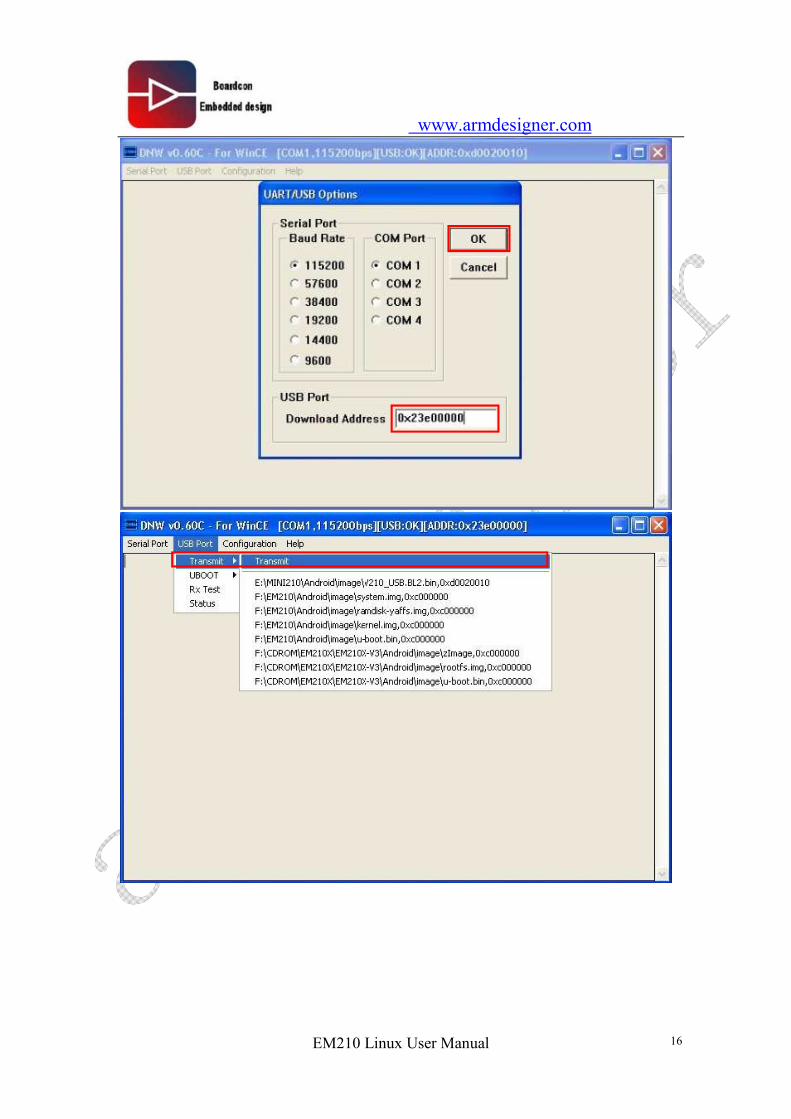
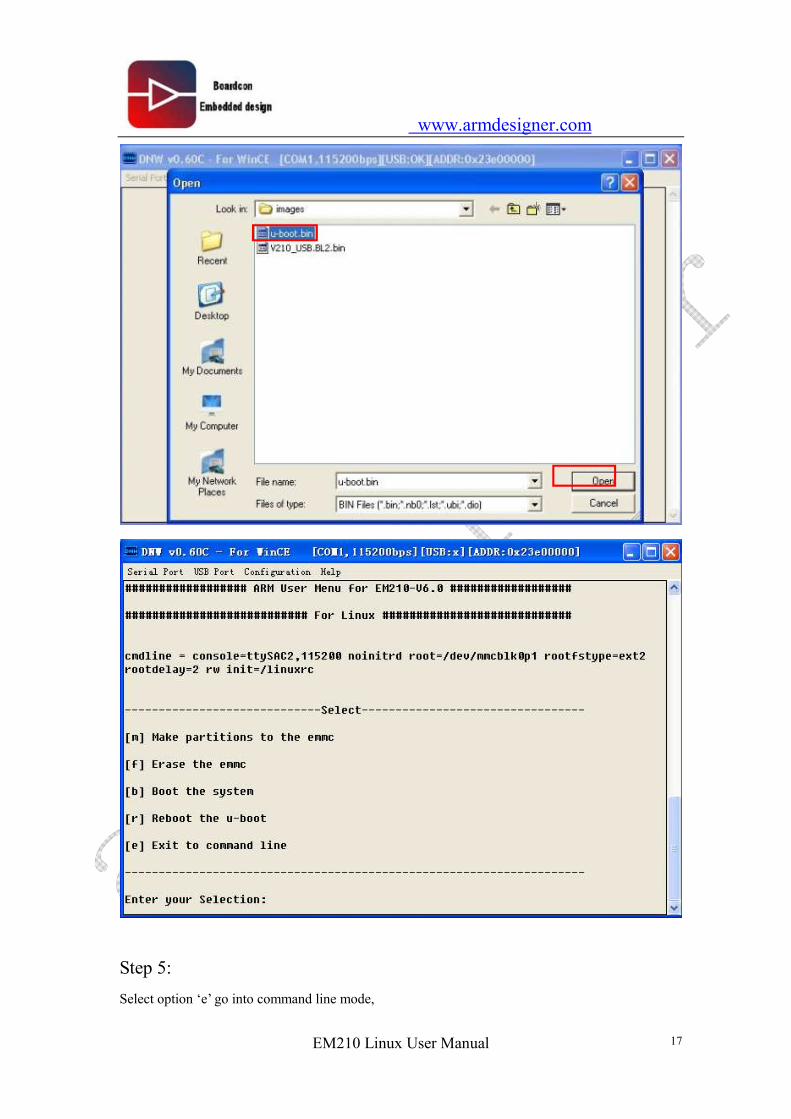
Confiure->Option to set USB Port download address: 0x23e00000
lunch USB Port->transmit->transmit to download Linux\Images\uboot.bin to EM210 RAM.
This time uboot.bin are going to run in EM210 board and will output message through serial port.
Following pictures show the detailed process:

www.armdesigner.com
EM210 Linux User Manual 14
www.armdesigner.com
EM210 Linux User Manual 15
www.armdesigner.com
EM210 Linux User Manual 16
www.armdesigner.com
EM210 Linux User Manual 17
Step 5:
Select option ‘e’ go into command line mode,

www.armdesigner.com
EM210 Linux User Manual 18
in uboot console create 3 partitions for iNand as followings,
SMDKV210#fdisk -c 0
Then lunch fastboot
SMDKV210#fastboot
The pc will report that have found new hardware if you have not ever install this usb
driver(Tools\windows\usb_fastboot_driver)

www.armdesigner.com
EM210 Linux User Manual 19
Now you need to install the USB fastboot driver.
Click “next” and select Tools/windows/usb_fastboot_driver director.

www.armdesigner.com
EM210 Linux User Manual 20
Click “Browse” and select Tools/windows/usb_fastboot_driver/i386/WinUSBCoInstaller.dll.

www.armdesigner.com
EM210 Linux User Manual 21

www.armdesigner.com
EM210 Linux User Manual 22
Now,the USB fastboot driver is installed successfully.

www.armdesigner.com
EM210 Linux User Manual 23
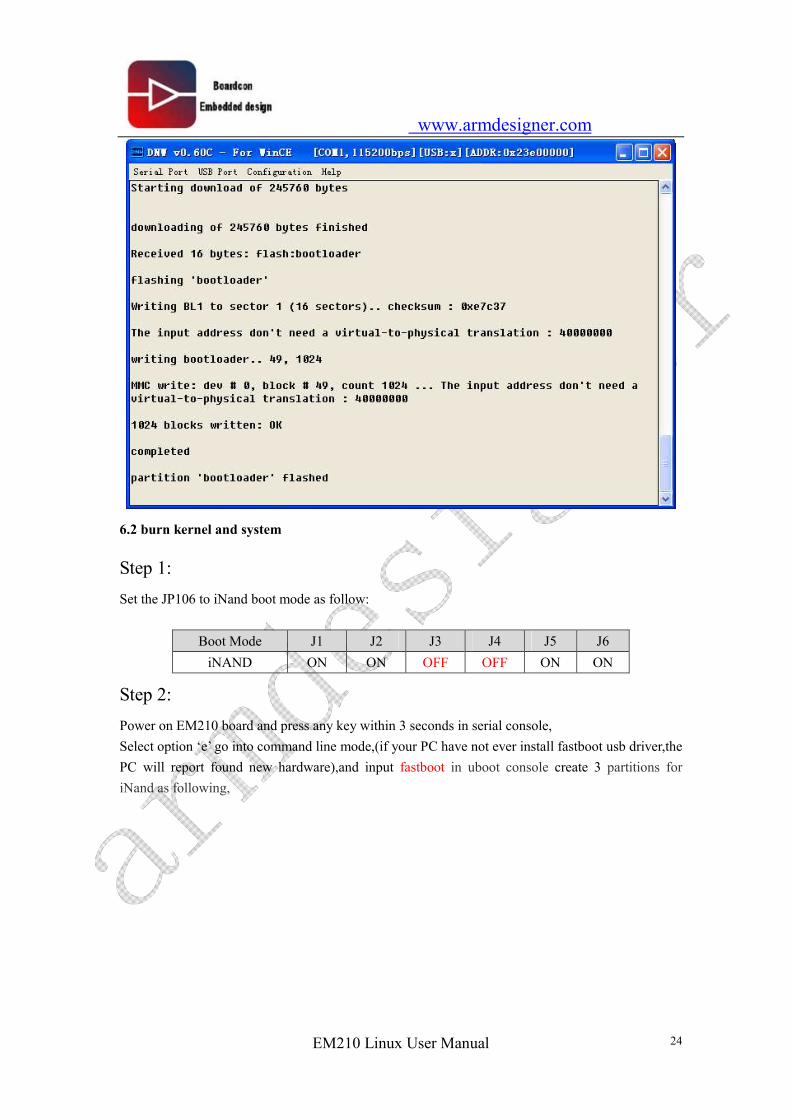
Step 6:
Open cmd.exe(\Linux\Image, double-click directly and open cmd.exe in the directory) and lunch
fastboot flash bootloader u-boot.bin to flash uboot.bin to iNand, following pictures show the
detailed process.
www.armdesigner.com
EM210 Linux User Manual 24
6.2 burn kernel and system
Step 1:
Set the JP106 to iNand boot mode as follow:
Boot Mode J1 J2 J3 J4 J5 J6
iNAND ON ON OFF OFF ON ON
Step 2:
Power on EM210 board and press any key within 3 seconds in serial console,
Select option ‘e’ go into command line mode,(if your PC have not ever install fastboot usb driver,the
PC will report found new hardware),and input fastboot in uboot console create 3 partitions for
iNand as following,

www.armdesigner.com
EM210 Linux User Manual 25
Open cmd.exe(\Linux\Image, double-click directly and open cmd.exe in the directory),and lunch
follow command to burn kernel and system to iNand:
fastboot flash kernel zImage
fastboot flash system system.img

www.armdesigner.com
EM210 Linux User Manual 26
So far, all images have been flashed to iNand. And now we can reboot the system.
Step 3:
uboot setup boot parameters, select [s]:

www.armdesigner.com
EM210 Linux User Manual 27
Power on EM210 board and press any key within 3 seconds in serial console,
Select option ‘e’ go into command line mode
SMDKV210#rm etc/pointercal
SMDKV210#reboot
Now the system go into calibrate the touch screen mode.
Note: if you want to erase the system partition ,please power on EM210 board and press any key
within 3 seconds in serial console, select option ‘f’ and ‘y’, it will be cleaned. As follow:

www.armdesigner.com
EM210 Linux User Manual 28
Note: Sometimes fails to start, you need to set the startup parameters.
Connect power, press and hold the power button for 3 seconds, and the system running, type any
key in 3 seconds to enter uboot command line, enter your Selection: e, as following:
# setenv bootcmd "movi read kernel C0008000; movi read rootfs 30800000 180000; bootm C0008000 30800000"
# setenv bootargs "console=ttySAC2,115200 noinitrd root=/dev/mmcblk0p1 rootfstype=ext2 rootdelay=2 rw init=/linuxrc "
# saveenv