electrical & computer engineering & computer engineering. ... which are the bottleneck in...
TRANSCRIPT

VLSI Component Placement byGrid Warping
Zhong Xiu
2003
Advisor: Prof. Rutenbar
Electrical & ComputerENGINEERING

VLSI Component Placement by GridWarping
Zhong Xiu
A thesis submitted to the graduateschool in partial fulfillment of the
requirements of the degree of
Master of ScienceIn
Electrical and Computer Engineering
Carnegie Mellon UniversityPittsburgh, Pennsylvania 15213
May 2003

Abstract
Placement is an important step in the overall IC design process in DSM technologies, as
it defines the on-chip interconnects, which are the bottleneck in determining circuit
performance. The "quadratic placement" methodology is reputedly used in many
commercial and in-house tools for placement of standard-cell and gate-array designs.
Numerous quadratic placement algorithms have been developed and tested over time.
Currently, these methods are capable of placing a few million modules, but are unable to
scale beyond that. The legalization step, required of all algorithms, is the step that is
expensive to perform and has limited scalability.
We have extended and improved an algorithm specifically targeting these extremely large
placement problems. Our approach is fundamentally different than existing tools in that
we move the placement area as opposed to moving the modules, thereby formulating a
problem that is mainly dependent on the placement area, instead of the net list size. As a
result, our algorithm is essentially a low dimensional optimization problem that is
inherently parallel. Preliminary tests running on big benchmarks show that our algorithm
is extremely scalable and will potentially allow us to handle the ever-increasing net list
better than existing tools. We believe we can improve our placement algorithm with more
future work.
VLSI Component Placement by Grid Warping i

Acknowledgments
I would like to thank my advisor, Rob A. Rutenbar, for his guidance throughout this
research project. He has been an unlimited source of information and ideas, not only for
my research but also for the final writing of this thesis. He not only pointed out the
direction, but also discussed many details with me.
I would like to thank Larry Pileggi for having reviewed this thesis.
I would also like to thank James Ma for cooperating with me during the implementation
of this project. His intelligent ideas and diligent work are appreciated.
I would like to thank Suzanne Fowler for allowing me to use her original codes. I would
also like to thank Trevor Carlson for his work on the IO part of this project.
Finally I would like to thank my father and mother. Without their consistent supports, I
could achieve nothing.
VLSI Component Placement by Grid Warping ii

Table of Contents
1 Introduction............................................ 11.1 The Problem ............................................................... 11 2 Background .......................... 21 3 Motivation ............................... 31.4 Organization of the Thesis ......................................... 3
2 Previous Work........................................ 52.1 Basic Quadratic Formulation ...................................... 52.2 Quadratic Solver ......................................................... 62.3 Refine Step ................................................................. 8
2.3.1 PROUD ............................................................................ 82.3.2 GORDIAN ....................................................................... 92.3.3 GORDIANL ................................................................... 102.3.4 DOMINO ....................................................................... 112.3.5 Other Techniques ........................................................... 13
2.4 Summary ................................................................. 15
VLSI Component Placement by Grid Warping iii

3 Approach: Grid Warping ................... 163.1 Overview .................................................................. 163.2 Initial Placement ....................................................... 173.3 Warping .................................................................... 193.4 Structure of Grid ...................................................... 25
3.4.1 Source Grid ..................................................................... 253.4.2 Target Grid ...................................................................... 27
3.5 Optimization ............................................................. 303.5.1 Classical Powell-style Optimization ............................... 303.5.2 Evaluation of the Cost Function .................................... 323.5.3 Iterative Sequential Warping ......................................... 34
3.6 Final Legalization ..................................................... 353.7 Summary .................................................................. 36
4 Experimental Results........................... 374.1 Experimental Methodology ...................................... 374.2 Results and Analysis ................................................ 384.3 Summary .................................................................. 41
5 Conclusions........................................... 445.1 Summary ................................................................. 445.2 Direction ................................................................... 44
VLSI Component Placement by Grid Warping iv

Introduction
1.1 The Problem
In a VLSI CAD flow, physical design is a backend process. In the physical
implementation of deep-submicron ICs, placement solution quality is a major
determinant of whether timing correctness and routing completion will be achieved. In
row-based placement, the first-order objective has always been obvious: place connected
cells closer together so as to reduce total routing and lower bounds on signal delay.
Because there are many layout iterations, and because fast placement estimation is
needed in floorplanning for design convergence, a placement tool must be extremely fast.
As instance sizes grow larger, swap-based methods like annealing may be too slow
except for detailed placement improvement. Due to its speed and "global" perspective,
quadratic placement is reputedly an approach that has been used within commercial tools
for placement of standard-cell and gate-array designs.
Quadratic placement algorithm makes two basic assumptions: 1) Each module is modeled
as a dimensionless point; 2) Each net is modeled as a set of 2-point springs. With these
two assumptions, the placement problem can be easily formulated as a neat mathematical
problem, and this problem can be solved relatively quickly even for very large net-lists.
But, since every module has its own shape and size, unfortunately the placement is illegal
with many overlaps. So a legalization step is needed. This step varies among tools, but it
is this step that is expensive and not able to scale very well. Today, most tools adopt a
partition-based approach as the legalization step. These tools can typically manage up to
a few million modules. But they all become very slow for larger designs.
VLSI Component Placement by Grid Warping 1

Introduction
1.2 Background
Today, all layout flows are composed of several heterogeneous steps: logic synthesis,
placement, global routing, and timing analysis are intermixed. A sequence of coarse to
fine layouts is evolved to allow difficult constraints to be addressed either logically or
physically at each step. But no matter how this flow is designed, the placement of a
single flat net list under basic area, congestion, and delay constraints is a core
competency. Placer capacity and quality are enormously important in all layout flows.
One important component of recent flows is the capability to "finalize" a "near" layout
efficiently.
Most layout tools adopt the fiat style of placement design. These tools can typically
manage up to a few million modules. Larger designs are forced to resort to a hierarchical
approach. The majority of these flat style tools use a quadratic placement method. There
are many existing placement tools using quadratic placement as the starting point. But
they tend to deviate in the way of legalizing the placement.
Some famous placement algorithms: PROUD [1], GORDIAN [2], GORDIANL [3], etc,
all use a classical quadratic objective function to begin placement, and alternate quadratic
solves with partitioning. They use partitioning to reduce the size of the placement
problem. Each region is recursively cut and the quadratic algorithm applied until each
region has a small number of modules. The resulting placements of these placers are not
legal. So they still use some strategies in the end to produce a legal placement.
Overall, these partition-based placers are very fast and the resulting placement quality is
very good, even competitive to simulated annealing. But they are very slow when dealing
with very large designs. And actually this is a common problem for most current tools,
including placers that use other strategies.
VLSI Component Placement by Grid Warping 2

Introduction
1.3 Motivation
In [20], Fowler developed a fundamentally different concept for a placement scheme,
motivated in part by a desire to handle extremely large placements in a completely flat
way. Our work begins here, by trying to extend her very simple, first generation
formulation, and repair several flaws in this initial attempt. Similar to current tools, our
technique uses a quadratic placement method, but is fundamentally different when
attacking the legalization step. The idea is strikingly simple: rather than move the
gates/blocks to optimize their location, we elastically deform a model of the 2-D chip
surface on which the objects have been quickly and coarsely placed. Put simply: we
move the grid, not the gates. Rather than move each point, we "stretch" the underlying
sheet until the points arrange themselves to our liking.
This strategy has two potential advantages: (1) deforming the elastic sheet is
surprisingly simple, low-dimensional optimization; (2) this very big design problem
transformed from a very high-dimensional optimization task into a very large numerical
cost function with a small number of degrees of freedom that determine the warping of
the grid. But this large cost function can be evaluated on a network of cheap computers--
the problem is very parallel, unlike classical placers. Following [20], we call this method
placement by grid warping.
Because our placement algorithm is a very low dimensional problem, we believe that this
can be extremely scalable and therefore potentially useful in placing large net-lists.
1.4 Organization of the Thesis
Chapter 2 is a review of related previous work, serving as a background to some
placement techniques. Chapter 3 goes through our new reformulation idea of the grid
warping idea for placement, including initial quadratic placement followed by refinement
VLSI Component Placement by Grid Warping 3

Introduction
steps. Chapter 4 describes the experiments we preformed and the results we obtained.
And Chapter 5 concludes with the future direction of this research.
VLSI Component Placement by Grid Warping 4

2 Previous Work
In this chapter we will revisit the quadratic placement algorithm and review some
existing placement tools relevant to our work. Quadratic wire length objective functions
are very common in these tools. These tools start from the quadratic placement and try
bard to make it legal or bring it closer to a legal placement. Overlap removal is iteratively
performed in the refine step.
2.1 Basic Quadratic Formulation
A VLSI circuit is represented for placement by a weighted hyper-graph, with n vertices
corresponding to modules (vertex weights equal module areas), and hyper-edges
corresponding to signal nets (hyper-edge weights equal criticalities and/or multiplicities).
The two-dimensional layout region is represented as an array of legal placement
locations. Placement seeks to assign all cells of the design onto legal locations; such that
no ceils overlap and chip timing and routability are optimized. The placement problem is
a form of quadratic assignment; most variants are NP-hard. [4]
"Pad" constraints fix the locations of certain vertices (due to the pre-placement of I/O
pads or other terminals); all other vertices are movable. The one-dimensional placement
problem seeks to place movable vertices onto the real line so as to minimize an objective
function that depends on the edge weights and the vertex coordinates.
By modeling each module as a dimensionless point and each wire as 2-point springs, the
placement problem is transformed into a mathematical problem. Actually the two-
dimensional placement problem is addressed by the means of independent horizontal and
vertical placements. Each placement tries to minimize a quadratic matrix form.
VLSI Component Placement by Grid Warping 5

Previous Work
Squared Wire Length Formulation: Minimize the objective ~(x) Y, i>j aij (xi - xj 2
subject to constraints Hx = b. This function can be rewritten as qb(x) = 1A xTQx.
(Here, xi is the x coordinate of module i, aij is the number of connections between module
i and module j)
If we take the pads constraints into consideration, the squared wire length formulation
can be written as:
tI)(x) = 1/2 xTQx + (1)
which is also a quadratic matrix form. (The formulation of Q and d can be found in [1]
[21)
fixed
Figure 1. Quadratic Formulation - For this example, the quadratic wire length in x-axis is:
I(Xl - k)2 + l(xa - XI)2 + (h - x2) 2 = [xi 2 - 2XlX2 + X22] + [-2k xl -2h X2] + [k 2 + h2]
The vast majority of quadratic placers solve the 2-dimensional placement problem with a
top-down approach. After the quadratic placement, the chip is divided into two parts and
quadratic placement algorithm is re-applied to each region, and this process recursively
repeats until each sub-region only has a small number of modules.
2.2 Quadratic Solver
To minimize (1), we compute the derivative of ~(x):
¯ ’(x) = Y2 xTQ + ~/2 Qx + d (2)
Since Q is a symmetric and positive definite matrix, (2) can be written as:
~’(x) = Qx + (3)
VLSI Component Placement by Grid Warping 6

Previous Work
The optimal solution is: Qx = -d, which is a linear equation. Since the number of
modules can be millions, it is not practical to solve this equation directly. Iterative
methods are used to get the solution.
Iterative methods for solving large systems of linear equations can be classified as
stationary or non-stationary. Stationary methods include Jacobi, Gauss-Seidel,
Successive Over-relaxation (SOR) and Symmetric Successive Over-relaxation (SSOR).
They are older, easier to implement and computationally cheaper per iteration. Non-
stationary methods include Conjugate Gradient (CG), Generalized Minimal Residual
(GMRes) and numerous variations. These are relatively newer and notably harder
implement and debug, but provide for much faster convergence. Additional
computational expense per iteration is normally justified by much smaller numbers of
iterations. [4]
A difficulty associated with the SOR, Chebyshev semi-iterative, and related methods is
that they depend upon parameters that are sometimes hard to choose properly. CG is a
method without this difficulty for the symmetric positive definite Ax = b problem.
The essential idea of CG is: if the search directions are linearly independent and Xk solves
the problem
min(4)
x xo + span {Pl,’",
for k - 1, 2, ..., (here ~(x) = V2 xTAx - ba’x, p~, ..., pk are the k directions to search
minimal x) then convergence is guaranteed in at most n steps. This is because xn
minimizes q~(x) over n and therefore satisfies Ax,~ -- b.
The CG method can guarantee to find the accurate solution in at most n steps by choosing
the search directions that are so-called A-orthogonal, a detailed description of CG and
pre-conditioned CG can be found in [5] and [6].
VLSI Component Placement by Grid Warping 7

Previous Work
2.3 Refine Step
As we know, after the quadratic placement algorithm, the layout has many overlaps.
There are different ways to remove the overlaps, and these lead to many different
placement algorithms. Most of these algorithms choose a recursive strategy to legalize
the layout. Algorithms using rain-cut partitioning are very popular. We will review some
famous placers and their refining strategies. These tools represent state of the art
quadratic placement placers.
2.3.1 PROUD
PROUD [1] uses a direct quadratic placement as a starting point for a recursive min-cut
partitioning strategy. Once the initial placement is found, the placement area is cut into
two regions of about equal modules. The quadratic placement algorithm is re-applied to
the two resulting regions. Pseudo-pins on the cut line between the modules are used to
model connections with modules outside of the current region. Each region is recursively
cut and the quadratic algorithm applied until each region has only 10’s of modules. The
whole process is repeated three to five times so that the modules’ movements in one
region have a chance to globally affect all other regions. The process is illustrated in
figure 2.
The resulting placement is not legal, so PROUD finalizes the placement by snapping the
modules into rows. This alone would not produce a very good result, so it iteratively
looks at a small area (window) of the layout and swaps modules, using a greedy
algorithm, to improve wire length. Overall this algorithm is fairly fast, but it is interesting
to note that over half the total wire length improvements are due to this finalization step.
VLSI Component Placement by Grid Warping 8

Previous Work
Use quad placement Padition Re-place left Re-placeas the starting point region right region
Repeat
Figure 2. PROUD - After the quadratic placement, partition the chip into two regions, re-apply
quadratic placement algorithm to each region and use pseudo-pins to model modules outside this
region, repeat this process several times.
2.3.2 GORDIAN
GORDIAN [2] is another tool that uses a classical quadratic objective function to begin
placement, and like PROUD alternates quadratic solves with partitioning. However, the
steps are very different. GORDIAN is more careful when partitioning. It recognizes that
modules have area, so it partitions the placement area into regions with about the same
module area, not necessarily the same number of modules. It is also more precise when
modeling the positions of pins on a module.
PROUD uses partitioning to reduce the size of the placement problem - each region
consists of a smaller quadratic solve. In contrast, GORDIAN uses partitioning to confine
the movement of modules. The idea is that the average location of the modules must be
the center of their region, as shown in figure 3. This location is referred to as the center of
gravity. GORDIAN recursively minimizes the quadratic wire length subject to a fixed
center of gravity constraint for each region. This has the advantage of moving all
modules at the same time. These new constraints change the formulation of the matrix
solve, but it is similar. CG method is used to solve the matrix.
VLSI Component Placement by Grid Warping 9

Previous Work
x center x center
Figure 3. GORDIAN - Center of Gravity Constraints: The average location of the modules must
be the center of their region
The resulting placement is not legal either, so GORDIAN also does a finalization step.
For standard cells, GORDIAN only snaps them into rows. This is fast, but not very
effective. For macro-cells, GORDIAN performs an exhaustive slicing optimization.
Actually there are still many additional engineering and tuning optimizations to improve
the layout quality. Overall GORDIAN is a very competitive and fast algorithm.
2.3.3 GORDIANL
Some researchers [3] noted the pros and cons of using a quadratic objective function.
These types of functions tend to overweight long wires at the expense of shorter ones.
(See figure 4 for a simple example) In other words, quadratic objectives functions
minimize the squared Euclidean length of all nets rather than just the standard Manhattan
length of all nets. The reason these functions have become so popular is that they are
continuously differentiable and minimizing them only requires solving a linear system of
equations. But this is not true for linear objective functions.
VLSI Component Placement by Grid Warping 10

Previous Work
fixed movable fixeds) quadratic objective function
le fixedb) line~.r objective function
Figure 4. GORDIANL - Optimal placements for different objectives: two fixed modules A, C
and a movable module B. Three nets connect them. Minimizing the quadratic objective function
yields the placement in a). The minimization of the linear function results in the placement in b).
This figure is from [3].
To obtain a near linear wire length estimation, GORDIANL uses essentially the same
algorithm as GORDIAN, except that after each quadratic solve it calculates the linear
wire length of each net and uses the inverse lengths as weights for the next quadratic
solve. This process is repeated until the wire length converges. By solving a sequence of
modified quadratic wire length problems, the resulting placement approaches a linear
wire length model without any difficult linear programming.
As they mentioned in the paper, GORDIANL yields results with up to 20% less area than
the quadratic objective function of the original GORDIAN procedure. The main reason
for these distinct improvements, as they said, is the length reduction of nets connecting
only two and three pins. But GORDIANL needs a much longer time to converge than
GORDIAN.
2.3.4 DOMINO
One detailed placer that is commonly used in conjunction with GORDIAN and
GORDIANL to further improve the layout is DOMINO [7] [8]. DOMINO is an efficient
iterative improvement procedure for row-based cell placement with special emphasis on
the objective function used to model net lengths. This iterative placement process starts
with a given placement and produces a sequence of intermediate placements. DOMINO
VLSI Component Placement by Grid Warping 11

Previous Work
is able to iteratively improve already legal placements, or legalize placements containing
overlapping modules, by cleverly formulating the problem into a network flow problem.
In the first step, an initial placement is generated by the GORDIAN or GORDIANL
procedure. DOMINO uses these coordinates as initial placement for the iterative process.
In each iteration step a new placement is generated from a current placement. The
process finishes when after several generations no significant improvement is achieved.
To divide each generation into local subproblems, the layout area is covered by an array
of overlapping regions. A subproblem consists of rearranging the cells currently placed
inside a region. Since the cells have different heights, their rearrangement may produce
overlaps and unused spaces. To construct a legal placement, DOMINO uses a simple but
effective strategy as briefly described below.
border l~se
Figure 5. DOMINO - Generation of a new placement: this figure is from [8].
DOMINO walks the layout along a jagged borderline (see figure 5). It tries to legalize
and improve the modules immediately above this line by packing them into rows. It
attempts to reduce the wire length with minimal disturbance to the modules. After each
iteration, a new, improved placement is generated that is free of interspersed spaces and
overlapping modules. These one-dimensional placement improvements "walks" are
VLSI Component Placement by Grid Warping 12

Previous Work
iterated over the whole layout until no significant improvement can be found. DOMINO
is a fast, efficient, detailed placer with the added advantage of being deterministic.
2.3.5 Other Techniques
PROUD, GORDIAN and GORDIANL all use some forms of rain-cut partitioning to
spread out dense overlapping modules. DOMINO is a deterministic detailed placer. We
now turn our focus to two placers using two very different techniques to accomplish the
same goal.
KRAFTWERK:
The fundamental problem with the quadratic formulation, according to [9], is it only
models wires as attractive forces. So they present a new force directed method for global
placement. Besides the well-known wire length dependent forces they use additional
forces to reduce cell overlaps and to consider the placement area. They believe that
compared to existing approaches, the main advantage is that the algorithm provides
increased flexibility and enables a variety of demanding applications.
A standard quadratic solve is first calculated. Then each small region of the placement
area is given an attractive or repulsive force that acts on every module - an attractive
force for regions with excess modules and a repulsive force for regions with excess
space. For each module, a net force is calculated and a new quadratic solve is formulated
with these new constraints. This process is repeated until the wire length converges.
The final placement is again not legal, and they choose to use DOMINO to finish the
layout. Based on their results, they said that this placer is able to outperform
GORDIAN/DOMINO in placement area by 6% using comparable or less CPU time.
They emphasized that the algorithm is the first one that is able to handle large mixed
block/cell placement problems without treating blocks and cells differently. And contrary
to state-of-the-art approaches, this algorithm can assure that timing requirements are
precisely met. Its main advantage may be due to the elimination of rain-cut partitioning;
VLSI Component Placement by Grid Warping 13

Previous Work
without partitioning it is impossible for the tool to make bad decisions, forcing modules
to reside in sub-optimal regions. One problem when applied to large net-lists, however, is
the reportedly complicated force calculation and tuning process for each module.
VYGEN:
The final tool we will discuss is a tool by Vygen [10]. They strongly believe that the
initial quadratic placement is a good placement and the only problem is that modules
overlap. So the basis of their algorithm is a quadratic optimization approach combined
with a new quadrisection algorithm. In contrast to most previous quadratic placement
methods, no rain-cut objective is used at all. Based on a quadratic placement, a
completely new algorithm finds a four-way partitioning meeting capacity constraints and
minimizing the total movement. Their solution is to legalize the quadratic placement with
as little movement as possible. They accomplish this by partitioning the layout into four
sub-regions (a 2x2 grid) based only on a capacity constraint. Their capacity constraint
the total area of modules that is allowed in a particular region. The process continues
refining the placement area into a 4x4 grid, then 8x8, and so on, until it is sufficiently
fine. At each stage, the circuits are assigned to the rectangular regions induced by the
grid. The procedure stops when the grid is fine enough: The height of the rows equals the
standard height of the circuits, and the width of the columns is roughly 50 times the
minimum width of a circuit. A special algorithm does the final detailed placement.
The final placement procedure makes use of the row structure of a standard cell chip. The
final placement consists of two main phases. The first phase determines an assignment of
the non-fixed circuits to the zones such that the total width of the circuits assigned to one
zone does not exceed the width of this zone. The second phase of the final placement
then finds an optimum disjoint placement such that the circuits remain within their zones
and also remain in their horizontal order according to the positions after the last QP. In
this way, they mentioned that they were able to legally place a 200,000 net circuit in
about six hours.
VLSI Component Placement by Grid Warping 14

Previous Work
2.4 Summary
All tools discussed above agree that a quadratic placement is a good start, if nothing else.
The differences arise when tying to legalize this initial quadratic placement. Many apply
a recursive min-cut partitioning algorithm to spread the modules out across the placement
area, while others believe this may force modules to wrongly live in sub-optimal regions.
Most descendants of GORDIAN use some form of linear re-weighting to better
approximate Manhattan instead of quadratic wire length. Except [10], who argues for a
"pure" quadratic placement, and strives to preserve as much of this placement as possible
in his own legalization process.
While these tools are relatively fast and efficient when dealing with wire length, we
believe problems will become apparent when trying to place extremely large net-lists.
The above algorithms, maybe with the exception of [10], were developed to target
placements of tens of thousands of modules. With transistors shrinking and density of
chips increasing, the need for a very large fiat placer is growing dramatically.
VLSI Component Placement by Grid Warping 15

3 Approach: Grid Warping
3.1 Overview
From Chapter 2, we know that there are two basic steps in placement algorithms: (1)
obtain an initial placement and (2) refine this placement until it is legal, or close to legal.
The main differences in the algorithms appear in the refinement step. Currently these
algorithms move the modules to legalize their locations. Here is where our placement
technique is fundamentally different. Instead of moving the modules, we move, or warp,
the surface on which these modules are placed. By creating a two-dimensional grid on
top of this surface, we are able to warp this grid until the underlying modules are
arranged such that our cost function is minimized. This new technique is essentially a
low-dimensional optimization problem, less dependent of problem size, with a potentially
large, but inherently parallel, numerical cost function. These characteristics will
potentially allow us to handle the ever-increasing net lists better than existing tools.
Our strategy is different with the GORDIAN and PROUD placers. We use only the
quadratic wire length, without linear re-weighting (like Vygen), and a significant part
our effort goes to "preserve" the overall quadratic placement, while moving it towards
legality as quickly as possible. However, our resemblance to prior placers basically ends
here: our goal is a formulation that moves the grid, and not the modules.
Our placement algorithm is composed of several optimization steps that are followed by a
final placement step that adapts the global placement to style-dependent constraints. The
input to our algorithm consists of a net list, and a description of the geometry of the chip.
Our algorithm starts with an initial quadratic placement, and then formulates the
improvement problem as an optimization problem. The optimization process is continued
VLSI Component Placement by Grid Warping 16

Approach: Grid Warping
until no big improvement is available. In each optimization step, we move the grid to
modify the layout. Then evaluate the new placement to see if it’s an improvement. After
the process, we do a final legalization step to guarantee the final placement is a legal one.
In the remainder of this chapter, we will explain the steps of our algorithm. First we will
discuss our initial placement, a classic quadratic solve, and then go into the details of our
refinement steps. These steps involve creating two grids: a source grid and a target grid.
The source grid is essentially a reduced net-list. The target grid has weights associated
with each grid segment which are the variables being optimized to minimize our cost
function. We will explain in details about our optimization process and also show the
final legalization step.
3.2 Initial PlacementFor our initial placement, we use the classical quadratic placement method of [11], which
minimizes the total squared Euclidean wire length. All modules are modeled as
dimensionless points, so shape, size, and pin locations are ignored. Wires are modeled as
two-point springs and I/O pads are fixed along the boundary of the placement area. The
problem is formulated into two matrix equations (one for each coordinate axis) that can
be solved quickly using a well-known conjugate gradient method with preconditioning
[5] [61.
Let us look at the quadratic problem in detail. Let cij be the connectivity between module
i and module j, e.g., the number of nets connecting the two modules. Thus a symmetric
connectivity matrix C = [cij] is introduced with cij = 0. We use the sum of the squared
wire lengths as the objective function. Let lij be the distance between module i and
module j, then with n modules, the objective function is
L = -g Z i~ l i~z ":’ (5)
VLSI Component Placement by Grid Warping 17

Approach: Grid Warping
where (xl, Yi) represents the coordinate of module
Next, a modified connectivity matrix B is defined:
B=D-C
where D is a diagonal matrix with
(6)
It is easily shown that Eq. (5) can be rewritten as:
L(x, y) = xa’Bx + yTBy (8)
where x and y are n-vectors which specify the coordinates of n modules. The usual
placement problem is then to minimize L subject to the "slot" constraints, that is, all point
modules are placed on an evenly spaced, two-dimensional grid. We use pads constraints
here and Eq. (8) becomes:
L(x, y) = x~Bx + 2dl~’X + y~By + 2d2a’y + (9)
The matrix C is positive definite if all movable modules are connected to fixed modules
either directly or indirectly. This condition holds for all useful net lists, since each
module should be accessible from the outside of the circuit. The vectors dl and dz
originate from the contributions of the pads.
Since (9) is separable into L(x, y) = L(x) + L(y), we can minimize L(x)
separately. Each is a quadratic form and can be transformed into a linear equation. The
conjugate gradient method (CG) is an iterative method for quickly solving large systems
of linear equations of the form Ax=b, where x is an unknown vector, b is a known vector,
and A is a known, square, symmetric matrix. This method is especially suited for sparse
matrices because it avoids factoring and back-substitution, which is mentioned in the last
Chapter. So we adopted this method with pre-conditioning to get our initial quadratic
placement.
VLSI Component Placement by Grid Warping 18

Approach: Grid Warping
3.3 Warping
Now that we have our initial placement we need to bring it closer to being a legal one.
The initial quadratic solve is a good start, but tends to produce very dense clusters of
overlapping modules. The essential idea of our algorithm is: after the initial quadratic
placement is obtained, we put a uniform grid on top of the chip, and then we begin to
warp this grid, at the same time we enforce all the points to move with this grid. In this
way we modify the layout until all the points are arranged in an optimal way.
We can just interpret the placement area as one elastic sheet and we can deform it. When
the placement area deforms, all the gates will move with it. In other words, we try to find
an optimal warping that makes each gate move to the right place, and thus improve the
layout. This process is illustrated in figure 6.
Figure 6. Warping - This is a simple example to show how warping works. Consider a circuit
with tour modules; the left figure is the initial quadratic placement. We interpret the placement
area as one elastic sheet and we can deform it. When the placement area deforms, all the modules
will move with it. We will try different kinds of warping methods until finally we find an optimal
solution. This is overall an optimization problem.
This idea is not complicated, but to implement such an algorithm is not so easy. There are
three very important questions in our algorithm:
1. How do we formulate the optimal warping?
2. Where do the modules go?
3. How do we optimize the grid warping?
These questions are critical to the implementation of our algorithm. By answering these
questions, the outline of the algorithm will be clear.
VLSI Component Placement by Grid Warping 19

Approach: Grid Warping
1. How do we formulate the optimal warping?
As in Fowler’s formulation [20], we place a uniform grid on top of the layout, but we
interpret this grid as "balls and springs", as shown in figure 7. Each spring has a unique
numerical strength and this strength can be changed. So, to change the grid, we just
change the strength of the springs, and thus make the balls move in the layout. At the
beginning, all the springs have the same strength and the grid is a uniform one. As we
change the strength, the balls will move due to the changing length of the springs. The
four balls in the comers are fixed; the other balls on the boundary can only move in one
dimension; all the other balls inside the chip can go anywhere. After the springs change
their strength, we only need to compute the new positions of all the balls to get the
warped grid.
Place targetgrid on layout
1
Interpret thisgrid as ballsand springs
0.5 2.5
1.5
1
t.5 0.7Change strength ofsprings - change the grid
Figure 7. - The formulation of warping: This is a simple example - a 2x2 grid. Originally all
the springs’ strengths are the same. Once we change their strengths, the balls will move, and thus
the grid is warped.
An elegant feature of Fowler’s formulation is that to compute the new locations of the
balls from the springs’ strengths, we only need to consider another quadratic problem.
Consider the four balls in the comers as fixed pads, the balls on the boundary have one
coordinate fixed, and the remaining balls are movable points. The springs are just the 2-
VLSI Component Placement by Grid Warping 20

Approach: Grid Warping
point springs between two points. We can formulate this problem as another quadratic
solve and apply the quadratic placement algorithm to compute the location of each ball.
Once we get the new locations of the balls, the warped grid is determined.
2. Where do the modules go?
After the new locations of all the balls are computed, we get the new warped grid. This
grid is not uniform any more. The next step for us is to map back this non-uniform grid to
a uniform grid and require all the points to move with the grid. As illustrated in Figure 8,
after we change the strengths of the springs, the balls move and thus the grid is warped,
our new problem is how we map back this warped grid to the original uniform grid.
The convex quadrilateral shape of the target grid determines location of each module in
un-warped source grid. There are many possible geometric transforms to map from a
convex quadrilateral to a unit square, and here we choose the bilinear mapping.
Warped Grid Uniform Grid
Figure 8. - Where do modules go: After we solve for the new location of each ball, the warped
grid is determined. The next step is to map back this grid to the original uniform grid and require
all the points to move.
Bilinear mapping [12] is a simple, proportional geometric transform. It is most commonly
defined as a mapping of a square into a quadrilateral. As shown in Figure 9, this mapping
can be computed by linearly interpolating by faction u along the top and bottom edges of
VLSI Component Placement by Grid Warping 21

Approach: Grid Warping
the quadrilateral, and then linearly interpolating by fraction v between the two
interpolated points to yield destination point (x, y):
(x, y) = (1 - u)(1 - v) Poo + u(1 - v)plo + (1 - u)vpol
~ sou~ space ~ ~estination ~ace
Figure 9. Bilinear mapping - This figure is from [12].
The bilinear mapping has an unusual mix of properties. Because of its linear
interpolation, the forward transform from source to destination space preserves lines
which are horizontal or vertical in the source space, and preserves equispaced points
along such lines, but it does not preserve diagonal lines.
As can be seen in Figure 9, we actually, need the inverse bilinear mapping to map back
from our warped target grid to the uniform grid. The inverse mapping from destination
space to source space is not a bilinear mapping, in fact it is not even single-valued.
However, the inverse mapping can be derived by solving two simple quadratic equations.
For details of bilinear mapping and inverse bilinear mapping, see [12] [13].
3. How do we optimize the grid warping?
The next question is how do we optimize the grid warping? After the quadratic
placement, we need to warp the grid and there are many different ways to warp it. So we
VLSI Component Placement by Grid Warping 22

Approach: Grid Warping
need to evaluate each warping to see if it is an improvement. Overall, this is necessarily a
nonlinear optimization process.
To evaluate the warped layout, we focus on two objectives: wire length and capacity.
That is to say, given the warped grid, we need to map it back to a uniform grid and force
all the points to move with it. After we get each point’s new location, we should evaluate
this placement. So we calculate our cost function based on these points’ new locations.
For the estimation of the wire length, we use the bounding box model for each net and
sum up all the lengths together. For example, if we have a 3-point net, we draw the
smallest bounding box that can enclose all the points; we use the sum of this box’s height
and width as the estimation of this net. Bounding box (also known as the half perimeter
model) is not a perfect wire length model, but is easy to compute and is a very good
estimation.
For the capacity, we just want each target grid cell to have about the same area as the
total area required containing all the modules placed in this cell. If all the modules have
the same area, we just want each cell to have about the same number of modules. A
penalty is added if there exists a difference between the grid cell’s area capacity and the
actual number .of modules it has. For example, suppose a 2x2 grid has 1, 2, 3 and 4
modules respectively, in the 4 unique cells of the grid. The total number of modules is 10;
there are 4 grid cells. So a simple capacity penalty is:
C = (1 - 2.5) 2 + (2 - 2.5) 2 + (3 - 2.5) 2 + (4 2 = 5
We simply penalize the "distance from mean capacity" for each grid cell. This does two
things: It discourages cells with more modules than can actually fit (more demand than
supply, for area). But it also penalizes cells that are "too empty", i.e., where there is more
supply than demand.
Our total cost is defined as:
f = (1 + k × capacity )wirelength
VLSI Component Placement by Grid Warping 23

Approach: Grid Warping
where k is a weight that can be adjusted. The goal for our placement algorithm is to
minimize the wire length while spreading all the modules out evenly over cells.
Given this cost function, we can evaluate each warping and determine whether to accept
it or not. So this is an optimization process, the weights of all the springs are the variables
to be optimized. The cost function is the criteria to be minimized. The starting point is
that all the springs have the same weights. The flow of our optimization is shown below:
Figure 10. - The Flow: After the quadratic placement, we do our optimization process.
After the initial quadratic placement, we put a uniform target grid on top of this chip.
Then we begin to perturb the weights of the grid’s segments and thus change the layout.
After each warping, we evaluate the cost function to see if it is an improvement and
decide whether to accept it. We repeat our optimization process until no improvement is
available.
VLSI Component Placement by Grid Warping 24

Approach: Grid Warping
We use a standard non-linear optimizer: a Brent-Powell style downhill engine, to
minimize our cost function [14]. And we will discuss the optimizer engine later in this
chapter.
3.4 Structure of Grid
After the initial quadratic placement, we want to improve our layout by formulating it
into an optimization problem. We attack this problem by building two grids - a source
grid and a target grid. Now, we discuss the details of these two grids and see how they
work in our formulation.
3.4.1 Source Grid
Our placement algorithm is designed to specifically target very large flat placements. To
handle this size, we create a relatively fine grid on top of the placement area, after the
initial quadratic solve. This grid is called the source grid. However, more attention needs
to be given to this grid since Fowler discovered [20], relatively quickly, that a uniform
source grid would not suffice for a few reasons.
Because of the dense clustering, if a uniform grid is simply placed on top of the
placement area, the majority of the grid cells will have few or no modules in them, while
other grid cells will have thousands. Figure 1 la shows an initial quadratic placement of
2271 modules, 2478 nets with fixed pins around the border of the placement area. Figure
1 lb shows a uniform 20x20 source grid overlaid on its initial quadratic placement. The
source grid cell occupancies range from 0 to 643. The fact that the modules are so
unevenly distributed among the source grid cells hinders our algorithm from spreading
them out because we are requiring all modules inside a particular grid cell to move
together. So instead, Fowler imposed a non-uniform source grid, which is created such
that each grid row or grid column has about the same number of modules.
To build the non-uniform grid, the placement area is walked twice. First, it is walked
from left to right calculating the width of each grid column as the distance walked until
VLSI Component Placement by Grid Warping 25

Approach: Grid Warping
1/(source grid size) of the modules has been seen. For example, if the source grid
20x20, the width of the source grid columns is the distance walked until 1/20th of the
modules have been seen. This process is repeated, except now walking from top to
bottom to determine the height of the source grid rows. We are essentially evenly sorting
the modules into rows and columns, which results in a non-uniform grid. Figure 12 is the
same initial placement as Figure 11, only now it shows a non-uniform 20x20 source grid.
The cell capacities range from 1 to 61. Better results can be achieved by increasing the
size of the grid.
Figure lla: Initial quadratic placement Figure lib: Uniform 20x20 source grid
After the non-uniform source grid is built. We spread out the non-uniform source grid
cells to a uniform one, while preserving most of the initial placement, to ease the task of
warping (as shown in figure 13). This new method, referred to as pre-warping, when
compared to a non-uniform source grid not spread out, gives us an 80% improvement in
the uniformity of the final target grid cell occupancies.
VLSI Component Placement by Grid Warping 26

Approach: Grid Warping
Figure 12: Non-uniform 20x20 source grid
Figure 13 - Pre-warping: Spread out the non-uniform grid to a uniform grid.
3.4.2 Target Grid
We now turn our attention to the target grid. The target grid is the grid that is "warped"
during the optimization of our cost function. It is a square, initially uniform, 4x4 grid laid
on top of the source grid. The target grid is not restricted to this size, but increasing the
grid size increases the dimension of the optimization problem. Other target grid sizes
VLSI Component Placement by Grid Warping 27

Approach: Grid Warping
were tested, but 4x4 and 5x5 seem to perform best. When this algorithm is run on even
larger benchmarks, a larger target grid may produce better results.
Figure 14a shows an un-warped 4x4 target grid. The key insight here is that we can
formulate warping using the identical mechanics of quadratic placement. The 4x4 target
grid is modeled as:
¯ 40 stretchable "grid segments", which define the left, right, top, and bottom sides
of each cell. 16 of these are colinear with the perimeter of the overall placement
area; 24 are internal.
To warp the grid, we simply re-weight the grid segments, and solve the associated
quadratic placement problem to relocate the grid points. Figure 14b shows the result of
changing a single grid segment weight and solving from [20]. As illustrated here, a single
point has "moved" from one target cell to another - not because we moved the point, but
because we warped the area on which the point was placed.
Point
/
Figure 14a: A 4x4 target grid with all grid
segments weights equal
Point
/~Wl
Figure 14b: Resulting grid if wl=100. Note
the point is now in a different target cell.
VLSI Component Placement by Grid Warping 28

Approach: Grid Warping
Warping really has two parts.
¯ Forward warping: given a set of segment weights, this is the process of solving
for the placements of the target grid.
¯ Mapping back: As shown in Figure 13b, given the new target grid, a point has
moved from one target grid to the next. To evaluate this warping, we need to map
back the point into its new, transformed location on the original placement area.
We note here that this formulation has several nice properties:
¯ Convex tiling of the placement area: our forward warping algorithm always yields
either a convex quadrilateral (e.g., a diamond-shape) or a triangle (in fact,
quadrilateral with a degeneracy that puts two end points essentially on top of each
other). In any event, our 4x4 grid tiles the overall space, and partitions all the
placed points onto one of the 16 regions of space, each of which is a simple
convex shape. This is enormously helpful in allowing us to design efficient
mechanisms to find which module is in which region after each warping trial, and
in allowing us to map the modules in each region back to a new physical location
on the placement area.
¯ Problem size: the dimensionality of the warping problem is related to the size of
the target grid. Said differently, the degrees of freedom in the problem - 40 - are
determined solely by the 4x4 choice for the target grid for warping. The cost of
evaluating a trial warping depends on the size of the placement netlist, but this is
just a large static cost function. We believe it can easily parallelize.
¯ Non-unique mapping problem: in our formulation, each set of choices for the grid
segment weights creates a new warping, which determines the "ownership" of
each module, i.e., into which of the 4x4=16 target cells any placed module will
fall. Once inside a target cell, however, there are many different options for
choosing the exact location of the warped module inside this region. Following
Fowler’s results, we also decided to use bilinear mapping, as mentioned before.
So, returning now to Figure 13, to allow the target grid to be warped, recall that each grid
segment has a weight associated with it. To start, all weights are set to be the same.
VLSI Component Placement by Grid Warping 29
Approach: Grid Warping
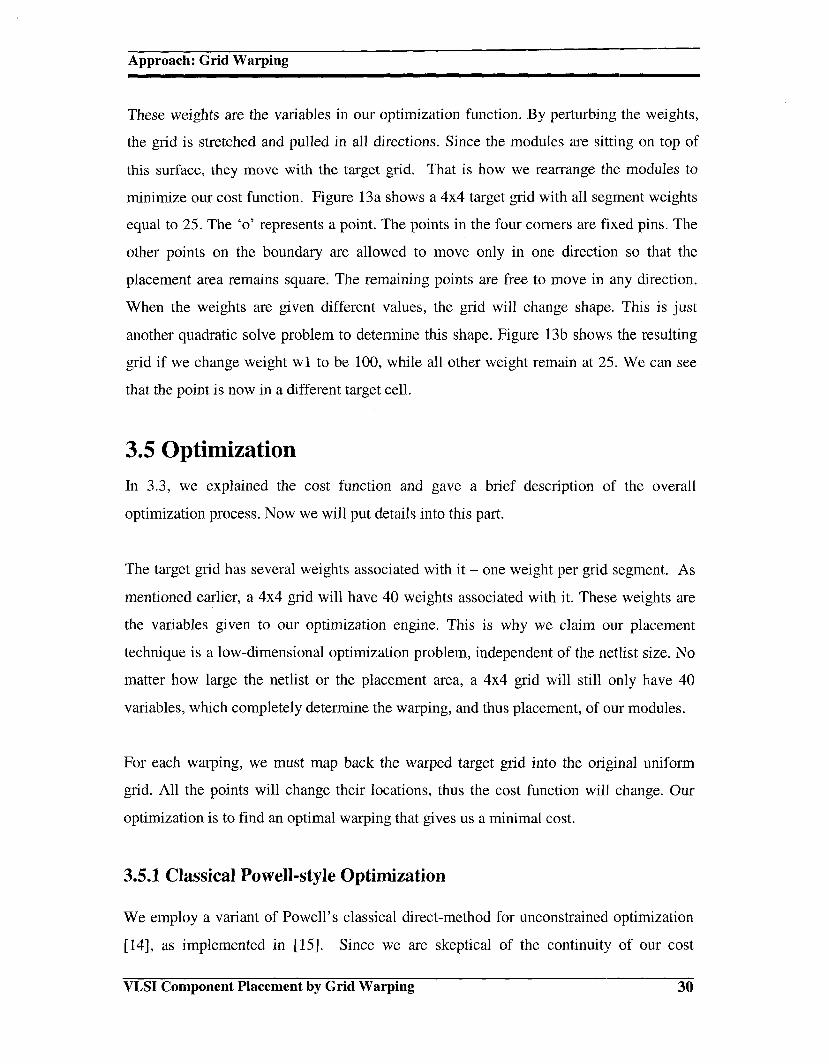
These weights are the variables in our optimization function. By perturbing the weights,
the grid is stretched and pulled in all directions. Since the modules are sitting on top of
this surface, they move with the target grid. That is how we rearrange the modules to
minimize our cost function. Figure 13a shows a 4x4 target grid with all segment weights
equal to 25. The ’o’ represents a point. The points in the four comers are fixed pins. The
other points on the boundary are allowed to move only in one direction so that the
placement area remains square. The remaining points are free to move in any direction.
When the weights are given different values, the grid will change shape. This is just
another quadratic solve problem to determine this shape. Figure 13b shows the resulting
grid if we change weight wl to be 100, while all other weight remain at 25. We can see
that the point is now in a different target cell.
3.5 Optimization
In 3.3, we explained the cost function and gave a brief description of the overall
optimization process. Now we will put details into this part.
The target grid has several weights associated with it - one weight per grid segment. As
mentioned earlier, a 4x4 grid will have 40 weights associated with it. These weights are
the variables given to our optimization engine. This is why we claim our placement
technique is a low-dimensional optimization problem, independent of the netlist size. No
matter how large the netlist or the placement area, a 4x4 grid will still only have 40
variables, which completely determine the warping, and thus placement, of our modules.
For each warping, we must map back the warped target grid into the original uniform
grid. All the points will change their locations, thus the cost function will change. Our
optimization is to find an optimal warping that gives us a minimal cost.
3.5.1 Classical Powe|l-style Optimization
We employ a variant of Powell’s classical direct-method for unconstrained optimization
[14], as implemented in [15]. Since we are skeptical of the continuity of our cost
VLSI Component Placement by Grid Warping 30

Approach: Grid Warping
function, but we need to minimize the number of evaluations of our expensive cost
function, we selected Powell as a reasonable starting choice for a direct method.
Powell is an algorithm that minimizes a given m dimensional cost function by
minimizing along specified direction vectors. So given a starting solution (a set of
weights in our case) and a direction vector, Powell calls a line minimization algorithm (to
be discussed momentarily), and when it returns, Powell has an improved m dimensional
solution. This process repeatedly continues, minimizing the cost function through all of
the m direction vectors until the relative decrease in the cost function is minimal.
The choice of direction vectors is key in minimizing the number of calls to the line
minimization algorithm, since we want to minimize in the direction that is most
beneficial. Simply put, we want to take a few large steps instead of several small ones.
Initially the direction vectors are unit vectors because we do not know, or wish to
calculate, gradients. During the execution of the algorithm these directions are selectively
replaced. It seems counterintuitive, but after each cycle through the direction vectors, the
direction providing the largest decrease is replaced by the average of all the directions.
The idea is that this direction will be a major component of the average; so replacing it
will reduce the linear dependencies of the set.
The line minimization algorithm used by Powell is called Brent’s method [14]. It is a
one-dimensional search trying to accelerate classical golden selection search using
inverse parabolic interpolation. The golden selection search is a well-known iterative
search algorithm that brackets a local minimum with three points. With each iteration it
closes in on the bracketed minimum until the window is sufficiently small (please refer to
Figure 15). Brent’s method attempts to find the minimum in only one iteration by finding
the minimum of a parabola that has been fitted to these three points. If the parabola is an
accurate model of the given cost function, then it has succeeded in finding the minimum
quickly; otherwise it resorts to the golden selection search algorithm.
VLSI Component Placement by Grid Warping 31

Approach: Grid Warping
Figure 15. One-dimension Search - This figure is from [14]. This search brackets a local
minimum with three points and repeats the process to find the local minimum.
3.5.2 Evaluation of the Cost Function
The cost function will need to be evaluated numerous times due to Powell’s repeated
calls to the line minimization algorithm. This means the target cells’ capacities and wire
lengths both need to be calculated. The calculations themselves are straightforward, but
we first must determine which point is in which target grid cells. For this Fowler used a
scan-line heuristic.
Scan-line algorithms have been widely used in the EDA community for mask checking. It
requires two tables: an edge table and an active edge table. In our case, each edge is a
target grid segment. The edge table is build using a bucket sort; where the number of
buckets corresponds to the number of scan lines. The number of scan lines, for us, is the
number of rows in the source grid. The edge table is sorted by each edge’s smaller y
coordinate, and within each bucket, sorted by each edge’s corresponding x coordinate.
The active edge table is initially empty. Then the edge table bucket with the smallest y
coordinates is moved into the active edge table and sorted by x coordinates. By simply
walking the active edge table, we are able to determine which x coordinates, and
therefore which source grid cells, correspond to which target grid cells, and we insert this
target gird cell number into a list of this source grid cell. Once a source grid cell is ending
VLSI Component Placement by Grid Warping 32

Approach: Grid Warping
or a new target grid segment is touched, the active edge table is updated. The next line
then is ready to be processed, so the edge table bucket with the next smallest y
coordinates is moved into the active edge table and re-sorted on x. This continues until
both tables are empty. (See figure 16 for an example)
Figure 16. Scan-line Algorithm - This is an example. Scan-line algorithm is run on each row.
For the row we choose in this figure, there are 8 possible target grid cells the point can belong to:
4 -ll, as indicated in the picture. For this 10xl0 source grid, we take out this row and run the
scan-line algorithm. We begin from the left most edge and walk from left to right, we only
consider the segments in this row’s range. After the scan-line algorithm, each source grid cell’s
list will be built up. For example, the 9th cell here finally get the list: 6->7->11->/. This means the
points in this cell can only belong to target grid cell 6, 7 or 11.
After the scan-line algorithm is done, each source grid cell has a list of target grid cell
numbers that the points in this source grid cell can only belong to one of these target grid
cells. Once we have this list, in the mapping back step, we need to determine which point
belongs to which target grid cell in the list. Then we can map this point back according to
the target grid cell’s location and we’re able to calculate each of the cost function
components once all the points are mapped back into their new locations. Here we use
VLSI Component Placement by Grid Warping 33

Approach: Grid Warping
bilinear mapping to map back the points. Bilinear mapping was introduced in 3.3 already.
Figure 17 shows an example of placement before and after bilinear mapping.
Figure 17. The placement before and after mapping - The left picture shows the warped grid
with all the points at their original locations. The right picture shows the grid is mapped back to a
uniform grid and all the points are mapped to their new locations.
3.5.3 Iterative Sequential Warping
Fowler’s original formulation for warping assumed a standard recursive decomposition in
which each cell in the warped placement is itself recursive warped. However, this is too
slow and we want to use a relatively quick way to try some experiments.
Notice the fact that one optimization can only find us one warping. So actually we do
three Powell steps, the latter one starts from the former one’s placement and begins to
find a new warping. We also use different target grid sizes here to add the flexibility. We
first use a coarse 2x2 target grid and use Powell to optimize, Then after this, we start our
2"a Powell step using a finer 3x3 target grid. Finally we use a yet finer 4x4 target grid and
run our final optimization step - the 3ra Powell step. After this step, we are done; we
currently do not use any recursion hierarchy, instead, we used this fast algorithm to try
some experiments. For large designs, of course we must recursively apply our algorithm
VLSI Component Placement by Grid Warping 34

Approach: Grid Warping
deep into each sub-region to further improve the layout. Our goal is this work was to re-
implement and tune Fowler’s initial warping kernel, and render it into form suitable to
use as the basis of ongoing experiments with warping.
We show the pseudo code of our algorithm below:
Grid-Warping Placement Algorithm:
1. Quadratic Placement Algorithm: Get the initial Quadratic Placement.
2. Build up the source grid so that each column and each row have the same number of
modules. Do Pre-Warping to spread out the dense clusters.
3. Begin our 1st Powell step
3.1 Starting from the given placement
3.2 Put a uniform grid on top of the chip
3.3 For each one-dimensional search
3.3.1 Perturb the segments’ weights, we call this vector x
3.3.2 Use another quadratic solve to get the warped grid’s location
3.3.3 Map every point into its new locations
3.3.4 Evaluate the cost function
3.3.5 Find the optimal solution in this dimension, update x
4. Go on with the 2nd and 3rd Powell steps
5. Final legalization step
Finish
3.6 Final Legalization
Our goal is not to take a very large net list all the way to legalization. We only want to
get close enough to drop it into a detailed placement polisher such as DOMINO.
Currently, we simply snap the final placement into rows by their y-coordinates before
putting it into DOMINO. One of our contributions in this work was implementing the
formulation for a more complete top-to-bottom flow from net-list, to rough placement, to
legalized row-based placement via the DOMINO tool. Fowler’s original warping kernel
VLSI Component Placement by Grid Warping 35

Approach: Grid Warping
lacked any backend integration with a real detailed legalization engine. Solving this was a
tedious but essential step for us, as it allows us now to compare our ongoing warping
results with a more standard placement flow, i.e., GORDIAN.
Before we are able to drop our placement into something like DOMINO, we believe a
few more steps may be necessary. Recall GORDIAN. To legalize their final placement of
standard cells, they only snapped the modules into rows, which proved to be very
inefficient. In contrast, PROUD made over half of their total wire length improvements in
their final legalization steps. These observations may imply we need to do something
similar.
Instead of only snapping the modules in rows, we may try PROUD’s technique of
looking at a small window, a target grid cell in our case, and apply a greedy algorithm to
improve the wire length. This may give us a better placement that will allow DOMINO,
or something similar, to finish the layout.
3.7 Summary
We reused Fowler’s original warping formulation, and described each of its steps. We
have completely re-implemented her initial warping kernel in a more modem object-
oriented style, integrated it in a standard placement flow, and introduced the idea of
replacing one single "deep" warping with a set of quicker coarse-to-fine sequential
warping. We describe our results in the following section.
VLSI Component Placement by Grid Warping 36

4 Experimental Results
4.1 Experimental Methodology
We acquired 18 benchmarks from the ISPD98 circuit benchmark suite [ 16] ranging from
about 10,000 to 210,000 modules. These benchmarks, listed in Table 1, were converted to
our input format; however, there was no information on initial placement area, module
size, or I/O pad locations.
We noticed these benchmarks had recently been used by Cong, et al, in [17] [18] to
compare their new placer technique to that of GORDIANLfDOMINO. They did not
specify an initial placement area and their I/O pads were located in a single line on one
edge of the chip area, as opposed to around the placement boundary. As a result, we
added ten percent to the total module area, assuming, as [17] did, each module was one
hundred square units. I/O pads were randomly placed around the boundary at the 8
compass points.
We ran these modified benchmarks on our re-implemented and improved warping engine
and compared our resulting wire length and CPU times to that of GORDIANL. We also
ran our placement through DOMINO to get our final legal placement, and also ran
GORDIANL’s placement through DOMINO to get a comparison reference final
placement. We compare the final wire length to the wire length of
GORDIANL/DOMINO.
VLSI Component Placement by Grid Warping 37

Experimental Results
The wire length of each net was computed as the half perimeter of the enclosing
bounding box. All CPU times are in seconds and are the overall running times.
# OF MODULES # OF NETS # OF ~O PADS # OF PINS
lbm01 12506 14111 246 50566
Ibm02 19342 19584 259 81199
Ibm03 22853 27401 283 93573
Ibm04 27220 31970 287 105859
Ibm05 28146 28446 1201 126308
Ibm06 32332 34826 166 128182
Ibm07 45639 48117 287 175639
Ibm08 51023 50513 286 204890
Ibm09 53110 60902 285 222088
Ibml0 68685 75196 744 297567
Ibmll 70152 81454 406 280786
Ibml2 70439 77240 637 317760
Ibm13 83709 99666 490 357075
Ibm14 147088 152772 517 546816
Ibml5 161187 186608 383 715823
Ibm16 182980 190048 504 778823
Ibml7 184752 189581 743 860036
lbml8 210341 201920 272 819697
Table 1: Benchmarks
4.2 Results and Analysis
All benchmarks were run with a 20x20 source grid. All benchmarks were run with three
Powell steps with the 2x2, 3x3, and 4x4 target grids respectively. Our placement
VLSI Component Placement by Grid Warping 38

Experimental Results
algorithm was run on a SUN Solaris CPU with 750MHz, GORDIANL and DOMINO
were run on a Linux machine with a single 750MHz CPU. It is fair, since we lack in our
current re-implementation of the warping engine any recursive placement step (as Fowler
originally had), we know a priori that our placement results will be inferior since they are
incomplete. Hence, we chose to run the GORDIAN flow at its "fast" setting, allows it to
trade wire length for run time. This is an imperfect, but not unreasonable comparison. We
do note here, however, that running GORDIAN at higher levels of effort can reduce wire
length by an additional 20-30%. For our placement algorithm, in the cost function, we set
the weight K equal to 1.
We compared our algorithm + DOMINO with GORDIANL + DOMINO. Table 2 shows
the resulting wire length and CPU times of both methods. We give raw wire length and
CPU time for GORDIANL+DOMINO, and for our own placer, give normalized relative
wire length and CPU time by dividing our results by GORDIANL + DOMINO’s results.
For CPU times, values larger than 1.0 mean that GORDIANL + DOMINO’s approach is
better or faster, while values smaller than 1.0 would mean that our approach is better or
faster. For wire length, values larger than 1.0 mean that GORDIANL + DOMINO’s
approach is better, while values smaller than 1.0 mean that our approach is better.
GORDIANL + DOMINO
WIRE LENGTH CPU TIIVIE
OUR PLACER + DOMINO
WIRE LENGTH CPU TIME
Ibm01 1.68e6 175.8 1.14 1.20
Ibm02 4.59e6 533.9 NA NA
Ibm03 5.99e6 508.0 1.01 0.77
Ibm04 6.79e6 521.9 1.14 1.23
Ibm05 1.17e7
Ibm06 8.28e6
lbm07
1045.0 1.03 0.74
1001.5 1.02 0.95
1082.2
2420.4lbm08
1.07e7 1.25
1.261.15e7
1.92
0.56
Ibm09 1.20e7 1389.1 1.19 1.02
VLSI Component Placement by Grid Warping 39

Experimental Results
Ibm 10 1.96e7 2227.8 1.20 0.98
Ibml 1 2.20e7 1881.0 0.95 0.97
Ibml2 2.96e7 2359.3 0.97 0.99
Ibm13 2.50e7 2809.5 1.12 0.97
Ibm14 4.53e7 6237.7 1.24 0.74
Ibml5 6.84e7 8529.2 1.06 0.67
Ibm16 5.54e7 9611.4 1.41 0.84
Ibml7 8.91e7 10798.3 1.05 0.62
Ibml8 7.90e7 14274.9 1.06 0.48
Table 2: Comparison between our approach and GORDIANL + DOMINO
From the results we can see that our wire length is as expected, inferior to GORDIANL +
DOMINO’s, but on average we are only 10% worse. However, we are faster, our speed
increases as the net-list sizes increase.
Of course, again, the comparison is imperfect. Our warping engine is as incomplete, and
is a partial attempt to "level" the comparison; we ran the GORDIAN flow at its faster,
lower quality setting. Nevertheless, we are pleased with these intermediate results, and
note that Fowler’s original engine, which lacked our integration with DONIMO, but did
have a full recursion capability, was producing wire lengths closer to 50% over the
GORDIAN result. We believe we are headed in the right direction. And the reasons why
our wire length is not as good as it could be:
1) No linear re-weighting: The GORDIANL work suggests that a linear re-
weighting scheme saves 20-30% on total wire length. We are not implementing
any re-weighting. Perhaps part of our wire length penalty relative to GORDIAN
is from this alone.
2) Compromised mobility of clusters: Our initial attempts at pre-warping, following
Fowler’s strategy, were intended to spread out the clusters by roughly one order
of magnitude. We succeeded in doing this, but it seems that the very small dense
clusters were not fully weighted in our equation. We were unable to break them
apart and relocate their individual modules to the appropriate locations. We
VLSI Component Placement by Grid Warping 40

Experimental Results
3)
believe that we need a more sophisticated non-uniform pre-warping. An adaptive
mesh, in the style of 2D finite elements, seems the right direction here.
Optimization Engine: We selected a classical Powell downhill optimizer because
of its ease of implementation, and the fact that it required no derivatives. Powell
works quite well for us, but the number of calls to our cost function determines
our mntime, which is a large flat evaluation of layout quality. We are considering
revisiting our "no derivatives" assumption: we need to see empirically how
smooth the space of grid edge weights really is. If it is reasonably smooth, a more
modem trust region method, e.g. [19], might give us a significant reduction in
runtime.
We note here finally that the differences in run-times among the experiments make sense.
As mentioned before, this algorithm is low dimensional and inherently parallel. Not only
could each target grid cell be optimized in parallel, but also the cost function could be
split into sections and calculated in parallel. We believe this would greatly reduce the
run-times since these optimizations and calculations are fairly data independent.
It is important to point out that as the size of the net-lists increase, the ratio between our
CPU times and GORDIANL’s increases. This implies that as the placement problem
grows, our algorithm has the potential of handling this size, whereas GORDIANL begins
to slow down.
4.3 Summary
We re-implemented and enlarged Fowler’s original warping kernel, integrated it in a
GORDIAN-DOMINO flow, and experimented with the standard ISPD98 benchmark set.
At this point, we have re-implemented roughly 80% of the original engine; our current
engine has roughly 10,000 lines of C++.
We presented results from the ISPD98 benchmarks, ranging from about 10,000 to
210,000 modules. As expected, our placement quality is inferior, but demonstrate a range
VLSI Component Placement by Grid Warping 41

Experimental Results
of performance we regard as quite promising. Our very incomplete engine averages 10%
more wire length, but shows an accelerating speed up over the GORDIAN flow as
problem size increases.
An example placement of our algorithm:
Initial Quadratic Placement
After Pre-Warping, try to find an optimal 2x2 target grid, and warp the grid, change the
layout. This is done in the 1st Powell step.
VLSI Component Placement by Grid Warping 42

Experimental Results
Do the 2nd Powell step, using 3x3 target grid
Do the 3rd Powell step, using 4x4 target grid. It’s the final step and the final layout.
VLSI Component Placement by Grid Warping 43

5 Conclusions
5.1 Summary
We believe the current placement algorithms will begin to break down as net-lists
continue to grow to 10-100 million gates. We described our efforts to re-implement and
enhance Fowler’s initial formulation of the grid-warping concept, to create a new
placement algorithm targeting these very large net-lists. The formulation of the problem
is essentially a low-dimensional optimization problem, independent of net-list size,
because we only optimize the target grid segment weights. This new technique is also
inherently parallel. These characteristics should allow us to handle these ever-increasing
net-lists, potentially better than existing tools.
We described an implemented completely new warping engine, and integrated it into a
GORDIAN-DOMINO flow for comparison. Preliminary results show much promise.
With additional research, we hope this technique can compete with current algorithms
and handle the net-lists of tomorrow.
5.2 Direction
The techniques and results presented here are preliminary and encourage further research
to refine this algorithm. Some future areas in our research will include:
1. Completing the missing recursion steps missing in our current version of the
warping engine
VLSI Component Placement by Grid Warping 44

Conclusions
2. Try alternative cost function and nonlinear optimization formulations to improve
the results
3. Modifying the algorithm so that large computations are done in parallel
4. Accounting for module size so that they are no longer modeled as points.
We believe that our initial placer results show promise, and with further direction could
be on the right path to a very fast, efficient, and fiat algorithm that is able to quickly
handle large net-lists.
VLSI Component Placement by Grid Warping 45

Bibliography
[1] R.S. Tsay, E. Kuh, C.P Hsu. "PROUD: A Sea-Of-Gates PlacementAlgorithm," IEEE Design & Test of Computers, December 1988.
[2] J. Kleinhans, G. Siegl, F.M. Johannes, K. Antreich. "GORDIAN:VLSI Placement by Quadratic Programming and SlicingOptimization," IEEE Transactions on Computer Aided Design,Vol. 10 No. 3, March 1991.
[3] G. Siegl, K. Doll, F.M. Johannes. "Analytical Placement: A Linearor a Quadratic Objective Function?" Proc. 28th Design AutomationConference, June 1991.
[4] C. J. Alpert, T. Chan, D. J.-H. Huang, I. Markov and K. Yan."Quadratic Placement Revisited" Proc. 34th Design AutomationConference, June 1997.
[5] J.R. Shewchuk. "An Introduction to the Conjugate GradientMethod Without Agonizing Pain", Carnegie Mellon University,August 1994.
[6] Gene H. Golub, Charles F. Van Loan. Matrix Computations, thirdedition, The Johns Hopkins University Press, 1996.
[7] K. Doll, F.M. Johannes, K.J. Antreich. "Accurate net models forplacement improvement by network flow methods," Proc. IEEEInt. Conf Computer Aided Design, 1992.
VLSI Component Placement by Grid Warping 46

[8] K. Doll, F.M. Johannes, K.J. Antreich. "Iterative PlacementImprovement by Network Flow Methods," IEEE Transactions onComputer Aided Design, Vol. 13 No. 10,.October 1994.
[91 H. Eisenmann, F.M. Johannes. "Generic Global Placement andFloorplanning," Proc. Design Automation Conference, 1998.
[10] J. Vygen. "Algorithms for Large-Scale Flat Placement," Proc. 34th
Design Automation Conference, June 1997.
[11] C.K. Cheng, E.S. Kuh. "Module Placement Based on ResistiveNetwork Optimization," IEEE Transactions on Computer AidedDesign, Vol. 3, July 1984, pp. 218-225.
[12] P.S. Heckbert. "Fundamentals of Texture Mapping and ImageWarping," Master’s Thesis, University of California, Berkeley,June 1989.
[13] J.D. Foley, A. van Dam, S.K. Feiner, J.F. Hughes. ComputerGraphics, Principles and Practice. New York: Addison-WesleyPublishing Company, 1990.
[14] W.H. Press, et al. Numerical Recipes in C: The Art of ScientificComputing. New York: Cambridge University Press, 1992.
[15] M.J. Krasnicki. "A Methodology for Distributed Simulation-BasedSynthesis of Custom Analog Circuits", PhD Dissertation, CarnegieMellon University, December 2000.
[16] http://vldicad.cs.ucla.edu/-cheese/ispd98.html
[17] T.F. Chan, J. Cong, T. Kong, J.R. Shinner. "MultilevelOptimization for Large-Scale Circuit Placement," Proc.International Conference on Computer-Aided Design, 2000.
Placement by (~rid Warping 47

[18] Chin-Chih Chang, Jason Cong, Zhigang Pan, Xin Yuan "PhysicalHierarchy Generation with Routing Congestion Control," ISPD’02,April 7-10, 2002, San Diego, California, USA.
[19] A.R. Conn, N.I.M. Gould, Ph. Toint. "Trust-region methods,"MPS-SIAM Series on Optimization, SIAM Publications,Philadelphia, PA, USA, 2000.
[20] Suzanne M. Fowler "Placement by Grid Warping" MS thesis,Electrical and Computer Engineering Department, CarnegieMellon University, December 2001
Placement by Grid Warping 48