dynamics of structures - personal homepageshomepages.ulb.ac.be/~aderaema/dynamics/2_dos_1dof.pdf ·...
TRANSCRIPT

Dynamics of Structures 2017-2018 2. 1DOF system
1
2.Vibrations: single degree of freedom system
1
Dynamics of structures
Arnaud Deraemaeker ([email protected])
*One degree of freedom systems in real lifeHypothesisExamples
*Response of a single degree of freedom (sdof) systemFree responseForced responseInfluence of the damping
*Reduction to a sdof systemEquivalent stiffnessEquivalent massEquivalent dampingValidity of the reduction
Outline of the chapter
2

Dynamics of Structures 2017-2018 2. 1DOF system
2
One degree of freedom systems in real life
3
Reduction of a system to a one dof system
Hypothesis :
-Rigid body-Motion in one direction-Linked to a reference point through a flexible element (with negligible mass)
Valid under certains conditions
-Specific direction of excitation and motion-Limited frequency band
4

Dynamics of Structures 2017-2018 2. 1DOF system
3
Rigid vs flexible body
In statics: flexibility = ability to deform under applied load, function of the stiffness
In dynamics, flexibility is a function of:- the stiffness- the mass- the frequency of excitation- the damping in the system
Freq < 20 Hz(earthquake)
Rigid vs flexible body : illustration

Dynamics of Structures 2017-2018 2. 1DOF system
4
Freq > 100 Hz
Rigid vs flexible body : illustration
Not a rigid body
Massless spring
Can be reduced to a one dof system
Rigid vs flexible body : illustration
Cannot be reduced to a one dof system

Dynamics of Structures 2017-2018 2. 1DOF system
5
Reduction of a system to a one dof system
Example 1:
9
Reduction of a system to a one dof system
Example 2:
10

Dynamics of Structures 2017-2018 2. 1DOF system
6
Example 3:
11
Reduction of a system to a one dof system
The motion is the rotation instead of the displacement
Reduction of a system to a one dof system
Example 4:
12

Dynamics of Structures 2017-2018 2. 1DOF system
7
13
Reduction of a system to a one dof system
Example 5:
Offshore platform
Response of a single degree of freedom (sdof) system
14
Dynamics of Structures 2017-2018 2. 1DOF system
8
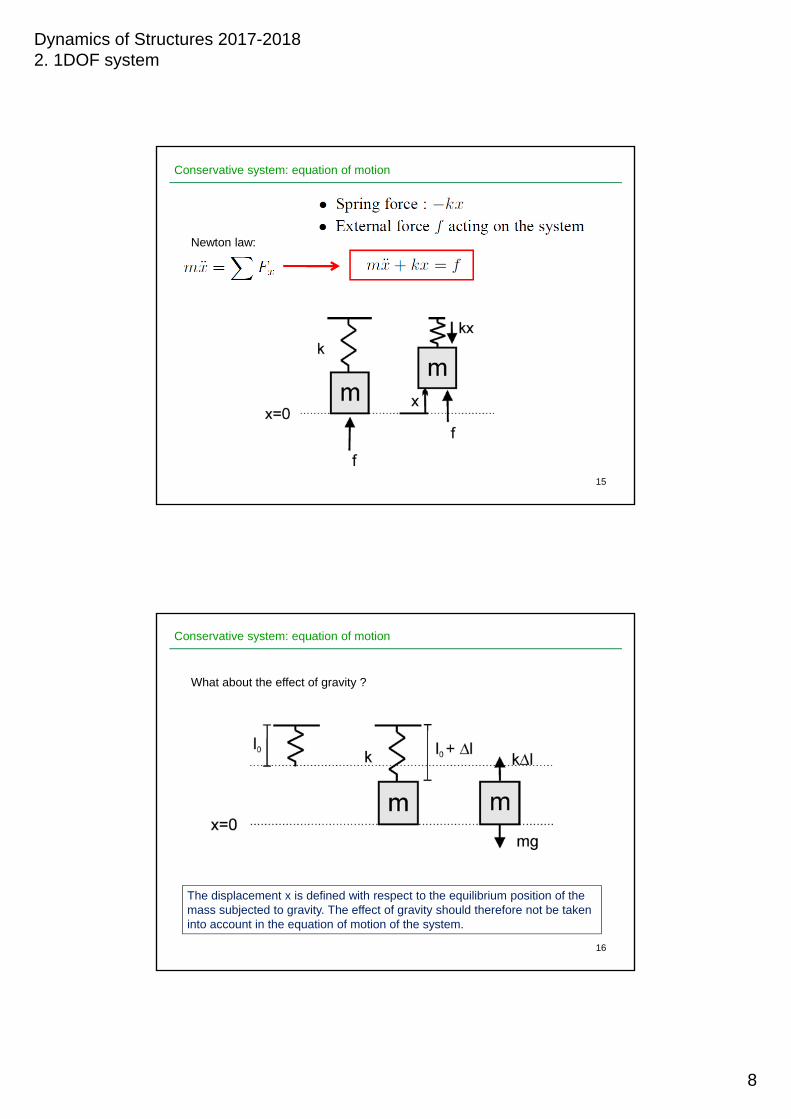
Conservative system: equation of motion
Newton law:
15
The displacement x is defined with respect to the equilibrium position of the mass subjected to gravity. The effect of gravity should therefore not be takeninto account in the equation of motion of the system.
Conservative system: equation of motion
16
What about the effect of gravity ?

Dynamics of Structures 2017-2018 2. 1DOF system
9
Equation of motion: general solution
Characteristic equation:
0
•In the absence of external excitation force, the motion is oscillatory. The natural angular frequency is defined by the values of k and m•The motion is initialized by imposing initial conditions on the displacement and the velocity
17
Equation of motion: general solution
18
*

Dynamics of Structures 2017-2018 2. 1DOF system
10
Alternative representation:
The motion can be described by a cosine function with a phase. The phase is a function of the initial conditions.
Equation of motion: general solution
19
*
20
Equation of motion: particular solution
Consider the continuous inverse Fourier transform of the excitation f
and isolate a single frequency component of the form
We now compute the particular solution of the equation of motion for this single frequency harmonic excitation

Dynamics of Structures 2017-2018 2. 1DOF system
11
Equation of motion: particular solution
21
Equation of motion: particular solution
22

Dynamics of Structures 2017-2018 2. 1DOF system
12
Positive if <n
Negative if n
Infinite if n
Equation of motion: particular solution
23
Bode diagram (linear frequency axis)
Equation of motion: particular solution
24
Dynamic amplification factor

Dynamics of Structures 2017-2018 2. 1DOF system
13
Bode diagram (logarithmic frequency axis) see MATH-H-201 (ULB) 25
Equation of motion: particular solution
*
26
Displacement in the time domain
Equation of motion: back to the time domain
Continuous Fourier
transform
Inverse continuous
Fourier transform

Dynamics of Structures 2017-2018 2. 1DOF system
14
What is resonance ?
Amplification of given frequencies
28
How resonance can lead to failure

Dynamics of Structures 2017-2018 2. 1DOF system
15
How resonance can lead to failure
Wine glass
Damped equation of motion
Damping force :
30
viscous damping

Dynamics of Structures 2017-2018 2. 1DOF system
16
Damped equation of motion: general solution
Characteristic equation:
31
*General solution
damping coefficient
Initial conditions:
32
Damped equation of motion: general solution
*
Dynamics of Structures 2017-2018 2. 1DOF system
17
33
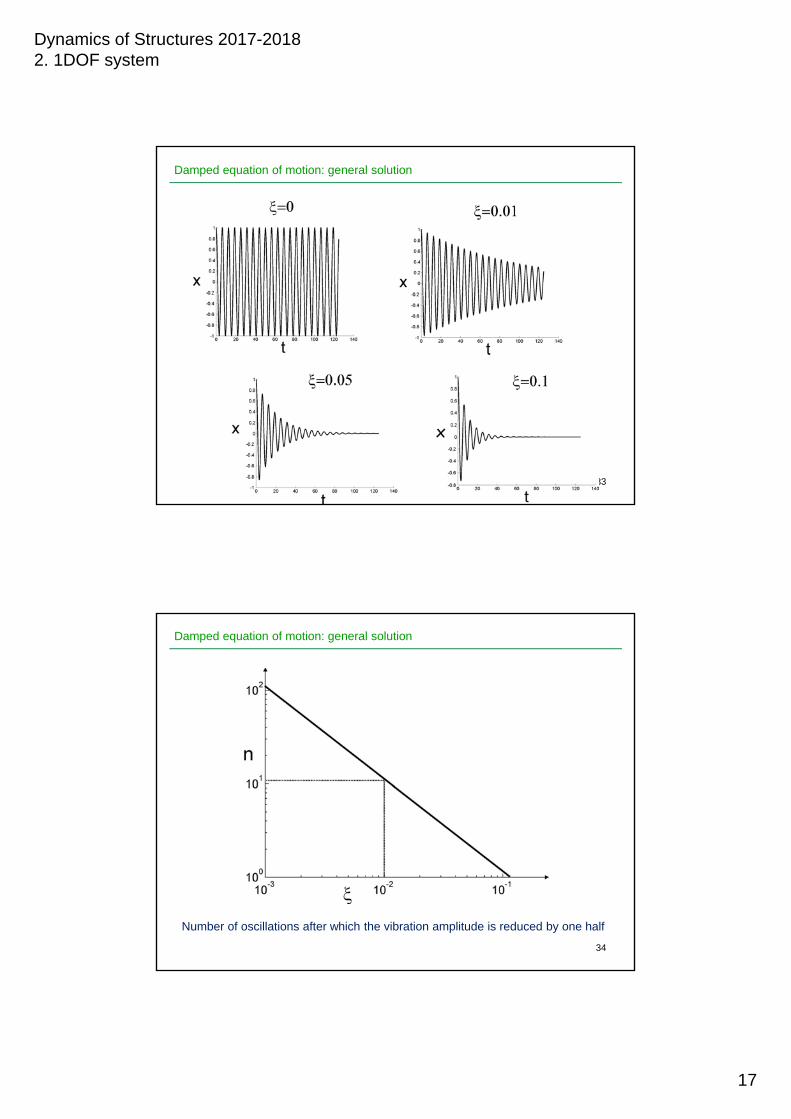
Damped equation of motion: general solution
Number of oscillations after which the vibration amplitude is reduced by one half
34
Damped equation of motion: general solution

Dynamics of Structures 2017-2018 2. 1DOF system
18
Critical damping
35
Damped equation of motion: general solution
Critical damping
Impulse response
Equivalent to initial velocity at t
36

Dynamics of Structures 2017-2018 2. 1DOF system
19
37
Impulse response
For an initial velocity, the response of the system is:
with
For a unit impulse , we define the impulse response h(t)
Damped equation of motion : particular solution
38

Dynamics of Structures 2017-2018 2. 1DOF system
20
39
Damped equation of motion : particular solution
*
Maximum
Max ampl.For small
40
Damped equation of motion : particular solution
*

Dynamics of Structures 2017-2018 2. 1DOF system
21
41
Bode diagram
Displacement
Velocity
Acceleration
42
Nyquist plot
The plot enhances strongly the frequencies around resonance

Dynamics of Structures 2017-2018 2. 1DOF system
22
We have and for so that we can write
The contribution of one impulse to the response of the system is given by :
43
Time domain response using Duhamel’s integral
f(t) is decomposed into a series of short impulses at time
The total contribution is therefore:
(h(t) is the impulse response)
44
Time domain response using Duhamel’s integral
For a single degree of freedom, we have :
Special case : harmonic excitation
The Fourier transform of h(t) is the transfer function

Dynamics of Structures 2017-2018 2. 1DOF system
23
Base excitation
Excitation
45
Illustration
46

Dynamics of Structures 2017-2018 2. 1DOF system
24
Reduction to a sdof system
47
Reduction to a sdof system
-Equivalent stiffness?-Equivalent mass ?-Validity (frequency band) ?
48
Dynamics of Structures 2017-2018 2. 1DOF system
25
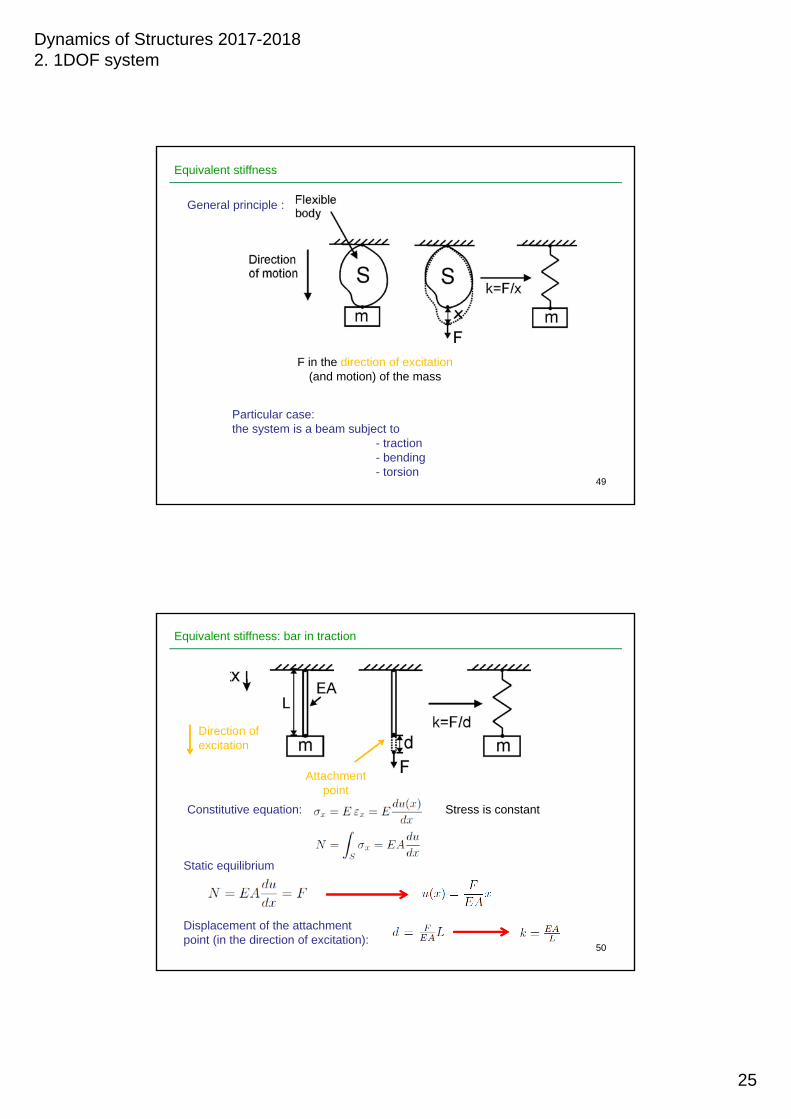
Equivalent stiffness
Particular case: the system is a beam subject to
- traction- bending- torsion
49
General principle :
F in the direction of excitation(and motion) of the mass
Equivalent stiffness: bar in traction
Displacement of the attachmentpoint (in the direction of excitation):
Constitutive equation: Stress is constant
Static equilibrium
50
Direction of excitation
Attachment point

Dynamics of Structures 2017-2018 2. 1DOF system
26
Equivalent stiffness: bar in torsion
Circular sectionConstitutive equation :
Rotation at the attachment point: 51
Direction of excitation
Attachmentpoint
Static equilibrium
J=rotational intertia
Equivalent stiffness : cantilever beam in bending
52
Direction of excitation
Attachment point
From tables

Dynamics of Structures 2017-2018 2. 1DOF system
27
53
Equivalent stiffness : of beams in bending
Equivalent stiffness of beams in bending can be computed using formulas fromresistance of materials or using tables :
54
Equivalent stiffness: portal frame

Dynamics of Structures 2017-2018 2. 1DOF system
28
55
Equivalent stiffness: portal frame
From tables (internet)
Equivalent stiffness: energy approach
Strain energy in a mass-spring system :
Bar in traction:
Bar in torsion:
Beam in bending:
56
Dynamics of Structures 2017-2018 2. 1DOF system
29
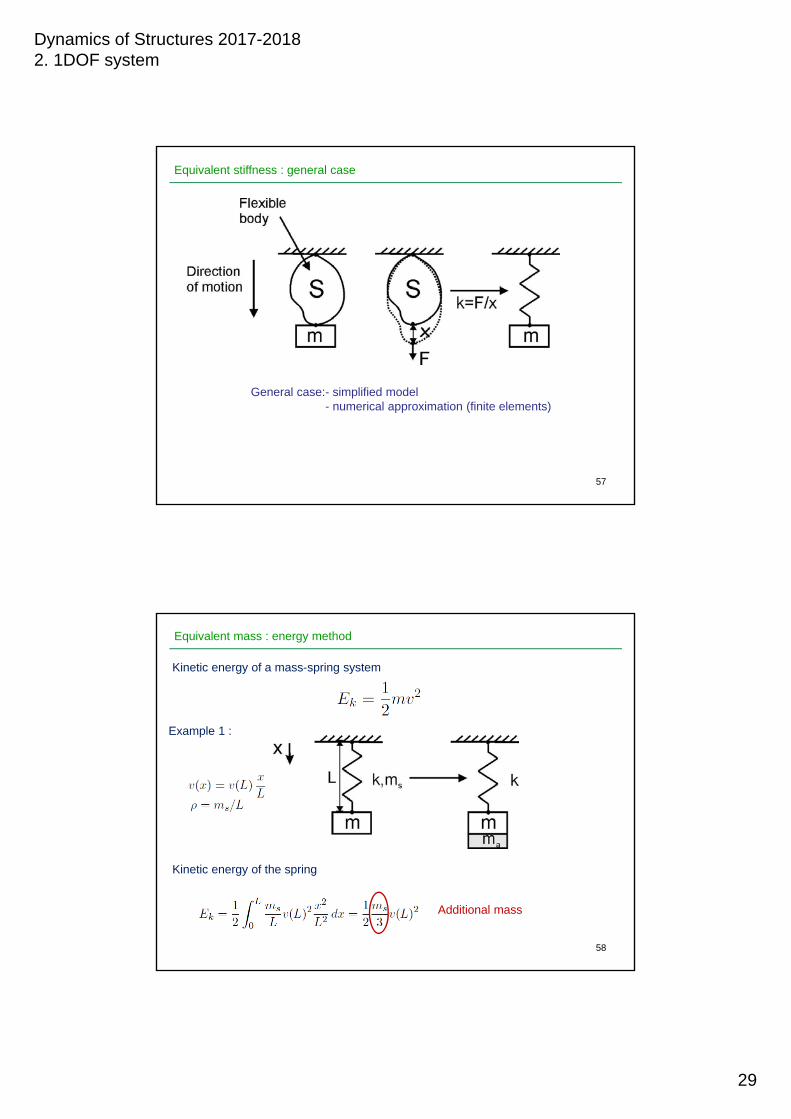
Equivalent stiffness : general case
General case:- simplified model- numerical approximation (finite elements)
57
Equivalent mass : energy method
Kinetic energy of a mass-spring system
Kinetic energy of the spring
Additional mass
Example 1 :
58

Dynamics of Structures 2017-2018 2. 1DOF system
30
Equivalent mass : energy method
Kinetic energy of a mass-spring system
Kinetic energy of the bar
Additional mass ma
Example 2 :
59
60
Equivalent damping : Types of damping
Damping = dissipation of energy
[Vibration Problems in Structures, CEB, 1991]
Dynamics of Structures 2017-2018 2. 1DOF system
31
61
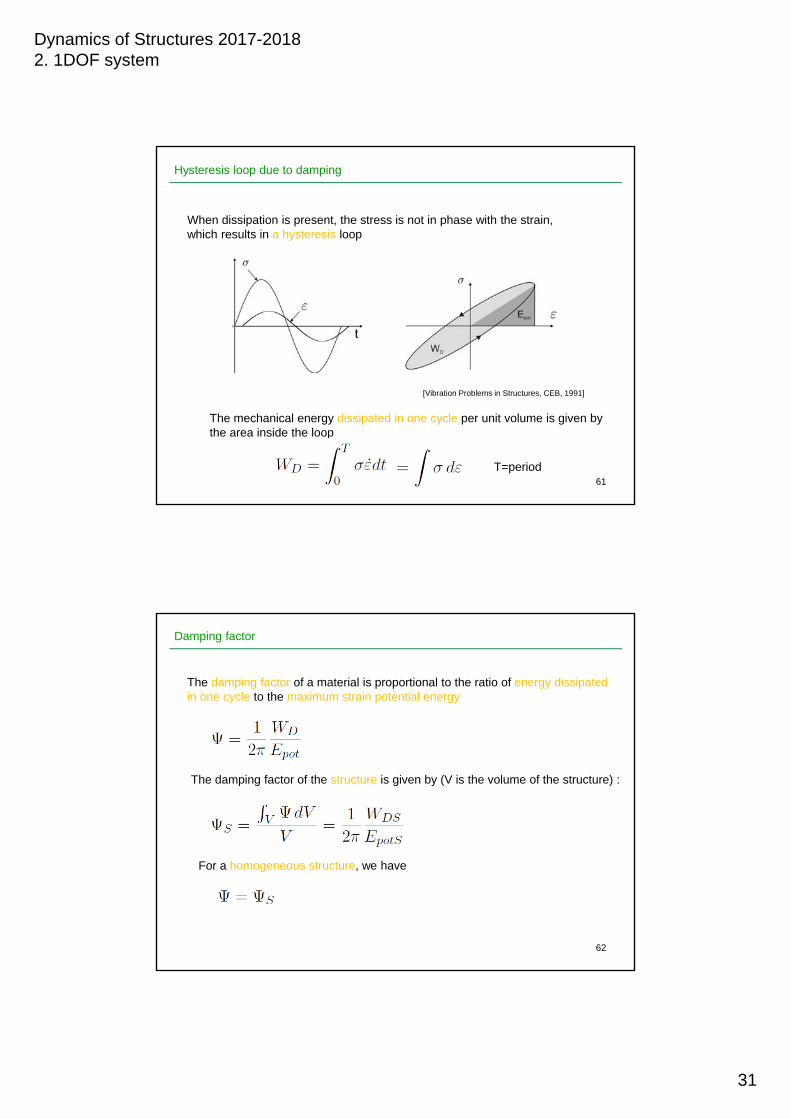
Hysteresis loop due to damping
When dissipation is present, the stress is not in phase with the strain, which results in a hysteresis loop
The mechanical energy dissipated in one cycle per unit volume is given by the area inside the loop
[Vibration Problems in Structures, CEB, 1991]
T=period
62
Damping factor
The damping factor of a material is proportional to the ratio of energy dissipated in one cycle to the maximum strain potential energy
The damping factor of the structure is given by (V is the volume of the structure) :
For a homogeneous structure, we have

Dynamics of Structures 2017-2018 2. 1DOF system
32
63
Damping factor of a SDOF system with viscous damping
*
64
Damping factor of a SDOF system with viscous damping
At resonance :
at resonance
Dynamics of Structures 2017-2018 2. 1DOF system
33
65
Equivalent viscous damping in real structures
Example of energy dissipation in a real structure
Frequency dependent damping coefficient -> difficult to use for time domain computations
66
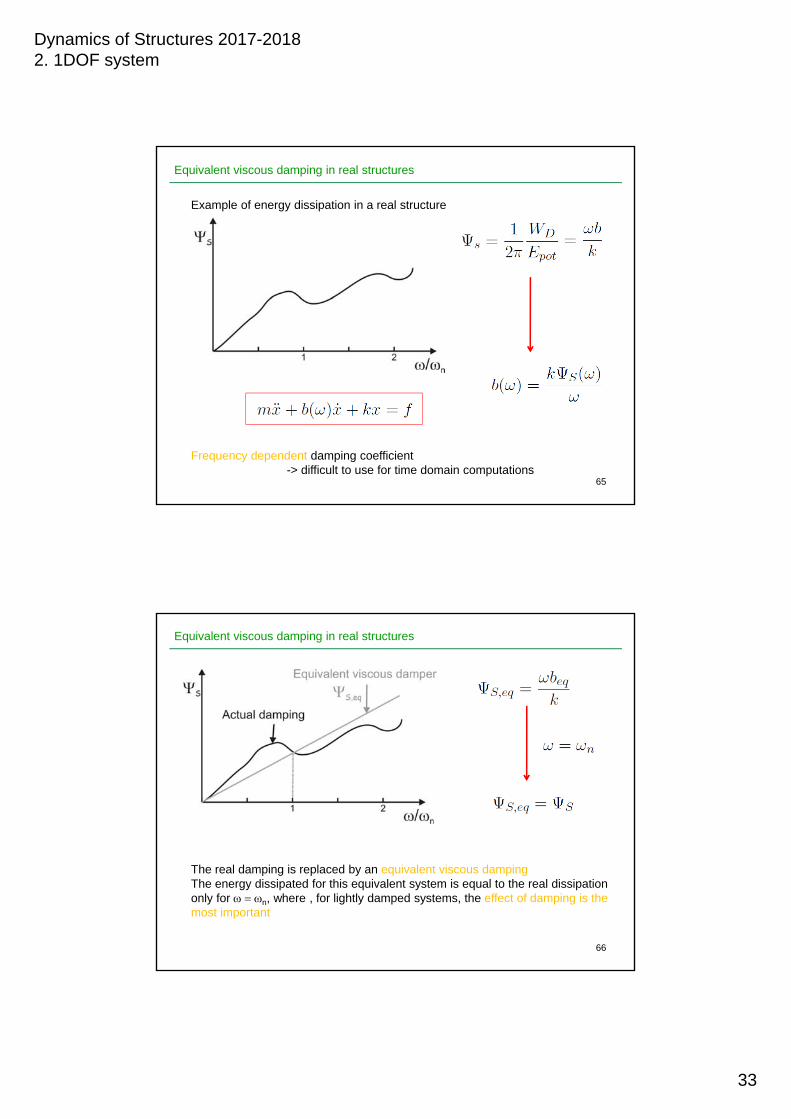
Equivalent viscous damping in real structures
The real damping is replaced by an equivalent viscous dampingThe energy dissipated for this equivalent system is equal to the real dissipation only for n, where , for lightly damped systems, the effect of damping is the most important
Dynamics of Structures 2017-2018 2. 1DOF system
34
67
Hysteretic damping : equivalent damping
In many engineering applications,S is found to be constant with the frequency
Hysteretic damping-> depends on frequency
68
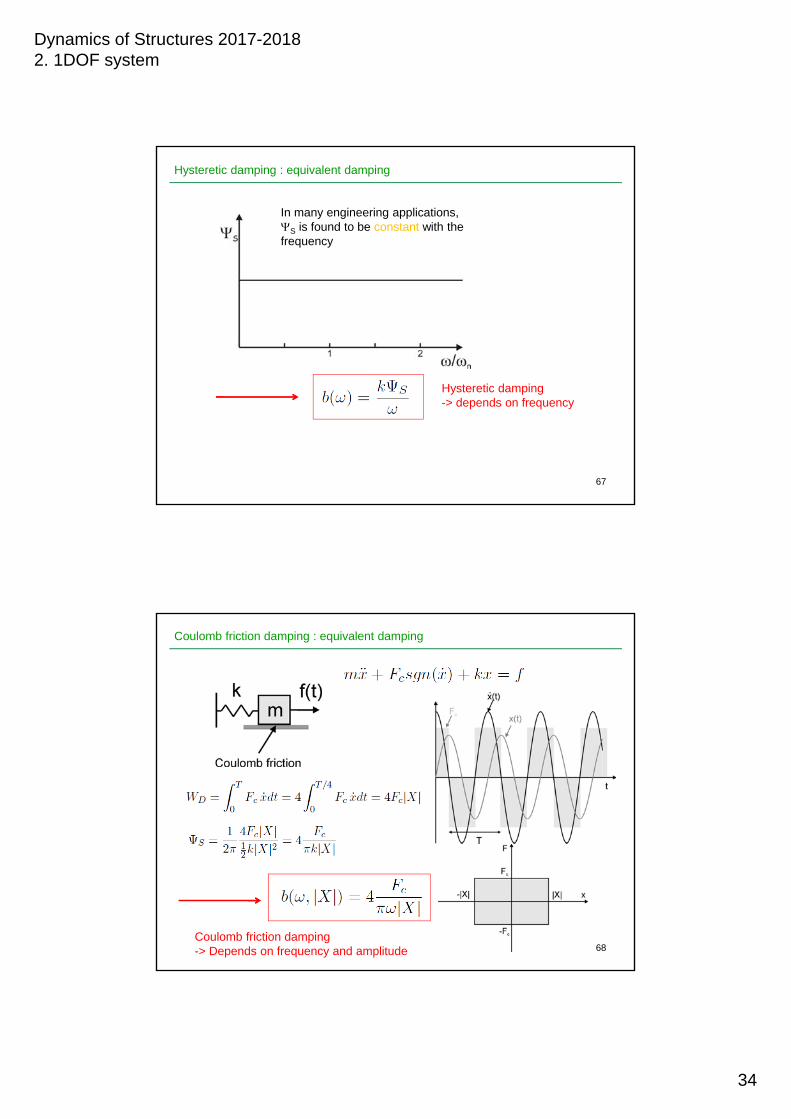
Coulomb friction damping : equivalent damping
Coulomb friction damping-> Depends on frequency and amplitude

Dynamics of Structures 2017-2018 2. 1DOF system
35
69
Measurement of damping
Logarithmic decrement method Half-power bandwidth
Estimation of in the time domain Estimation of in the frequency domain
70
Logarithmic decrement method
Dynamics of Structures 2017-2018 2. 1DOF system
36
71
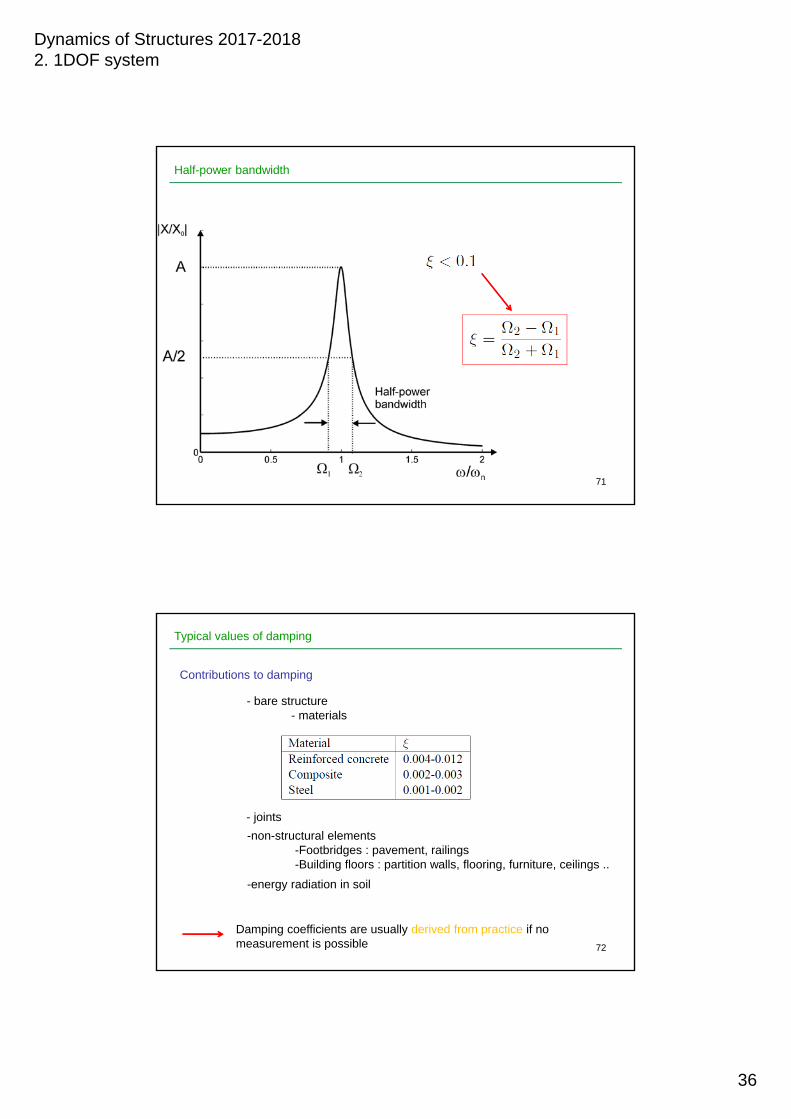
Half-power bandwidth
72
Typical values of damping
- bare structure- materials
- joints
-non-structural elements-Footbridges : pavement, railings-Building floors : partition walls, flooring, furniture, ceilings ..
-energy radiation in soil
Contributions to damping
Damping coefficients are usually derived from practice if no measurement is possible

Dynamics of Structures 2017-2018 2. 1DOF system
37
Frequency limits for one dof systems
73
Continuous model
SDOF model 1 SDOF model 2
m=100 kg, E =210 GPa, =7800 kg/m3, L=1m;A = 0.0004 m2
Frequency limits of SDOF systems for real continuous systems
74
k =EA/L = 8.4 107 N/mM = 100 kg
fn=145.87 Hz (mass M)
fn=145.11 Hz (mass M+ma)ma = AL/3 = 1.04 kg <<M
SDOF hypothesis not valid for frequencies > 2000 Hz
Dynamics of Structures 2017-2018 2. 1DOF system
38
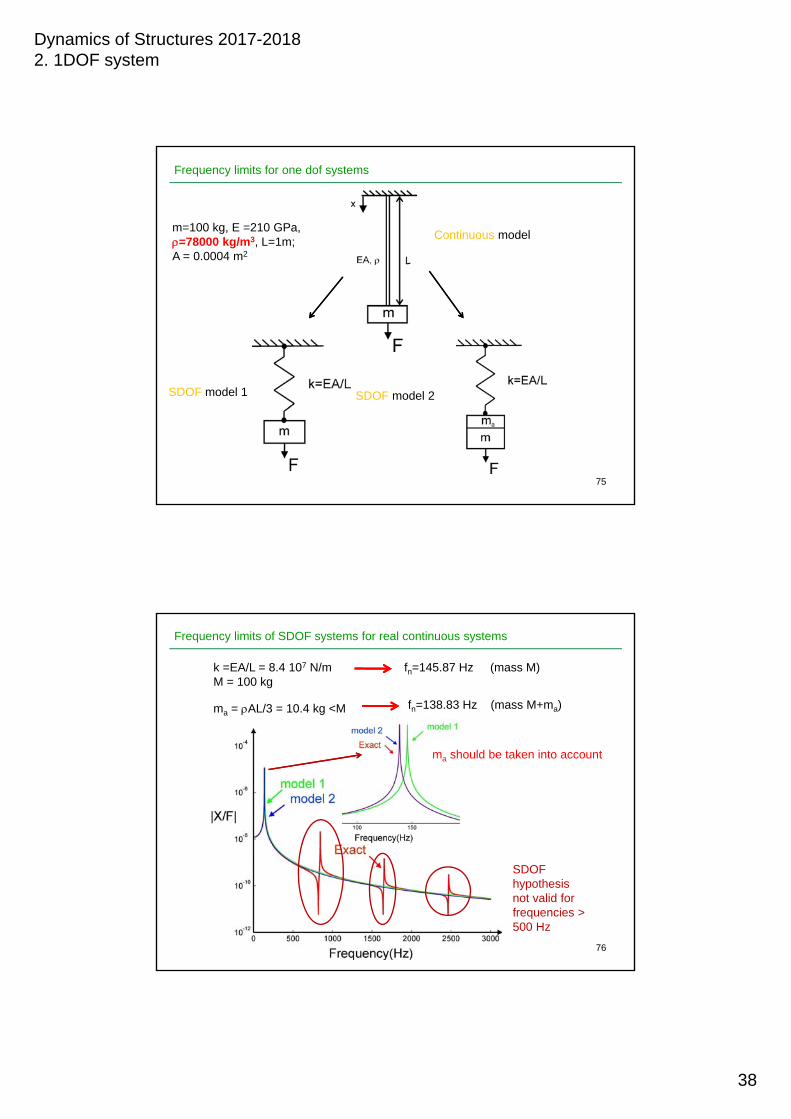
Frequency limits for one dof systems
75
Continuous model
SDOF model 1 SDOF model 2
m=100 kg, E =210 GPa, =78000 kg/m3, L=1m;A = 0.0004 m2
Frequency limits of SDOF systems for real continuous systems
76
k =EA/L = 8.4 107 N/mM = 100 kg
fn=145.87 Hz (mass M)
fn=138.83 Hz (mass M+ma)ma = AL/3 = 10.4 kg <M
SDOF hypothesis not valid for frequencies > 500 Hz
ma should be taken into account

Dynamics of Structures 2017-2018 2. 1DOF system
39
77
Summary
In particular cases, a real system can be reduced to a sdof system.
This requires computing the equivalent mass, stiffness and damping of the system
The validity of the model is limited and it should not be used outside of a certain frequency band, and for motions and excitations in other directions.
The tools to compute the response of single degree of freedom systems have been described in this chapter, both in the frequency and in the time domain
78
Application example: the accelerometer
In the frequency domain :

Dynamics of Structures 2017-2018 2. 1DOF system
40
79
Application example: the accelerometer
Piezoelectric accelerometer
80
High resonant frequencyLow sensitivity
Low resonant frequencyHigh sensitivity
Application example : the accelerometer