dynamic pilot power control
TRANSCRIPT

8/3/2019 Dynamic Pilot Power Control
http://slidepdf.com/reader/full/dynamic-pilot-power-control 1/5
DYNAMC PLOT OWER AOATON N CDA
SSTE
Jug, M Shh F Drkshn
Lucn Tchnologies Ntwrk Sytm GmbHuux tre 1941 umbr/y
Emai: {umchahdkan}@uctcomF +9911 60
Kyrds CDM tm l btng et pot powerocaton do mo
Absr
In ths per a w conct o h pilot powr aotio ince son mUpe as (CDM) moi ommu-ton yte is todued he dwk of nowdy onst pt powe aoon e se el atn ff. T nrod ocpt f dyn pot pw o-to h t pt te au plt pwr aorn tote t d tuatn n te l. h o te one hnt o mo n b ue w e l i owa coon nd o te othr hand mor subriers b ev gly oded l T reu n edora caiy o t A syst
Inrdu
ody CA mob ommunon yt o
m pot can e conou bdcs at a otnpowr n e own to ow itco eceitll murmen. Th rsmt owe the mopot cal crcl t detme t oe of trouh gnneren rtio mrm Asrom t sout anmt pwr h nrr l t nwok ee ect quaity a mobl.One ko e tat occu o otat pot pw -oton th oc ll bhn he l wlw eee ve co g aa than oe wit ghntrrence lv. ote fft t mntn is t -tern au t lot can em tw lod ad r o t te nteren e low, then h nerfrnce nwrk s maiy ued b
lo caes the cruns t ow ht itilse sr mo n dict chnn mnlytd b po hn inrenc.akn t drwbacks f cotan o pwr loion nout we tod alohm wr po pwr,ll n il Moble ommuat yemS networ date to the pacua ow onto By yical justng t t powerinte l wl i emon a be giant reuc w twork ca mnt hpeon o te opoed agtm s gtd w o nac st imatr t b obrd t
whn pyig th dnc pot pwr cti cm tovea cc of t sytem nrehe pa s orge olw ton w nodue dymc pt powr ocaio chm en, co h saton too a te nvestitd nio e ed n
4ow ome smaton rsuts an h
ovl pty ga t lgor i ln eton oncuin drw
lgrhm
oway M mol oton sytm sopt contt o pwr of 10% of t mmumpow o t rdo mir 2] ypl m ml- ppled g ot w f dB. Dg two o the plt wer res ntatut nt ot power s crae te syem nret c rthn . umr o the powreem o be to hh f low lodd wch unnel crae ntern l d t o snu t dtg f th plt pwer s nmcadaptd o h c e oa to mt pnn cora arah cr a l om s i th ll lras ue to etoo o t to oR on lo hnl t cll g us mobl ti the e w nt ae o ook into e oe ercton t ot pow hosen w tsupo od els u wi be orszd o owoad ces a thu d o h te oruon an ro sion
y runnin nac ytem ions t av e capay a un o er o a o slo pw ng wa ttd Tn or ctd
pot ow ttn mmu c oa was dtemi twh he proba tha mol is a t oo into thell ow n trhold . 0. gur necton s sut a rati etw g ellod i downlnk iecto ad plo wr wasfound
PC/H = · P +
wh d w appom to numa dmto bta y ystm l smon he new plt

8/3/2019 Dynamic Pilot Power Control
http://slidepdf.com/reader/full/dynamic-pilot-power-control 2/5
pw e H ded s uput rttnger with ter ac h ltg w us so tat thepi pwe is chaged moohly a g t t aatn, Te e lad downlik cn sdefd s o [I]:
he DCH is he urent tste poe f the base tt r th deated hel mm he trsitdw f th coon hans and is e ximmp prde by h an e W
3 Simulaton Scearo
Th eac o h pped dync pi po ada-an hm hs been eved y mens o nmeimul e e the ymc yte iuln tolT Simio o th vtion Alghms ne nw) wch h een dscribe n 2] he p-se th i th nvtigaon a vd e ynm tok aiu The to w muag l ue e number mong obi emnas a mu- en mt t ue to be of a reor mngmet agotms n eae( s a n hdoe e he ra eok efoa. Ro i qt a cl permance etcay evalate Pe pamees nukig pbity h obbi tat obl can b
h l no el" n rhp e d tE mato's bad n a prate pah lossmap w ddi be aamets Fgu 1 o gated SAM l cenao with ae tn B NdB n nuu e satn (UE usr
qupme.Fr the vio ue rg le af xagaao raped n e orde w h cd ps p le y a a hdwn ros. heao pramter ht e e te stn edpi i e W hae et a pe tl del cnsdegaxiu atio onig a sein mbin for stnd ste hndv repiy. F u nvns thenmbe simune lik was scte a mxm u he ins r di an dpng a lin e e o dB ad dB epecte f.
# f B t / 2 3 seo ach lesctr s a wraped oudPth l ol O umr a u
e au 00
hd di 5 d stanard ein200 m en l
mot 50 h an see kh tdd etio
b Sn pmetr
TE I ; -m tl1-,� "1iIf'D=; �," - ._�nf � lAO, 9f-
:i O a[�JLl' f:< !
My_; : Acle : i i
o263
C
Cl al 3
CI.
no" 0 H
U
\ trmfi £! 1o C
( sl�c /
02
ULl rXp' "59dm
\
, E
tai �
eb-
2
7
n )
F
Oh ulJ
: /. s W
di
HI.91 �
\ 8
G U P ·4 O 3 Im
M sa sar,
8/3/2019 Dynamic Pilot Power Control
http://slidepdf.com/reader/full/dynamic-pilot-power-control 3/5
od cnt hs bn apped ung the downn cla, Equin W app msson n ngsonoto as we s nm dt rt aaptto (dynaber conto DBC [4]) Te packt daa contl agohm gorithm ngotts te ud a t ng
a ep depndng o the cnt ld staon o hel t. hi le bu on onoschm admts high data r anmon g 3 bpi h ce d
' lw h ow mon hsho
rDBc d a ow dat rat wh h ell od is beow thhgher dmon thehod r" or the ow daes uhermo DB gom a u novod stuas ongton on nd rus hdt rte a wh nsume r amon o had sous whn he od hs ben dtcd o o the ongeson thl w nall the dat ate i dted to he tu conitns Fr instnn h mobile mmnn syt tutn mour whre th ro lin o pi usr oms
we wth ncsng pbbilty ong th nnctionThn s bnfa to redu t ate oer tmna h aio lin. Moroer if t rdo iine eter a cn mount of dt as t berm ed (bur shod t t t te s n-cred gan a a time ncre e) p (ds-n conto i pfmd The ppld ad ontro prts e ummed in ae
t tt
C 50%
rsion 75%cnsi 0% tr 50 ky
nr tm ond
e : ontr aramet fr dwl.
U sc svc pa t Ta Th mos ue a pket e p wh mmu r 38 kbps trmore dt wlkt aes pos A s po a ndm wkwith he vel oi ivn n abl . Wthin th nvtig tns w a k dwod s n new al. hs a t owng a Poson pcs aoding oh frd lad I vl rt my di-ut ov h smuto a h s ctt w t
to A I srvi) nd h lok a ws
amd as BER = % h phy ly pame na nmy reurd J nd ereneato F (with an without s hando tan romnk ar smulation h owng the hosn pmters fo the namcpot per apin gothm e ls se EqutnI» = 3 W and = 004 W h cl d s bow
= 8 th pilot pow mt o 03 W n ce od s b 6% the plo powr s mt t 2 W h f atoJw t to 000
7
ere Peer egake sere D d ats 36/8
38 bps (rbUL t re 6 ks(xd
Dt oum D I M
Atit BL BE %
Tbl 3 Sce pmt
Peer Stg
L R = 64kp E = 30 BD R = 3 = 5564 dB SHO) R 128 E = 45526.0 B (SHO Rh 6k E 50565 dB SO R 32kbs 62.0 B SO)free ft 08.55/060 (SHO
hy la pmet
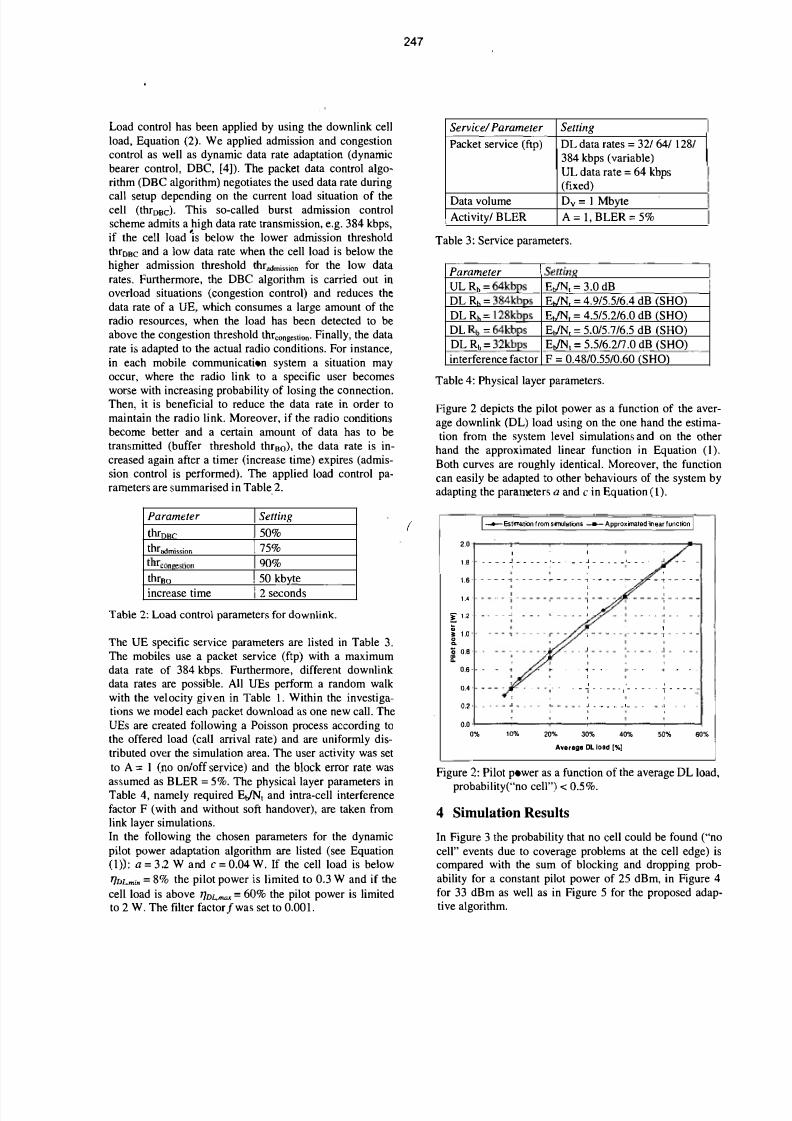
gr 2 ps he pot owr s funion o h r-ge downk D lod ng n e hnd th estm- tn fo the tm e mulaon and on the therh th ppxmatd ln fuo n uto IBoth us oughy nta ooe th funtonn ai dae othe hau th sm ptng th rrs d n uato )
n ltn ppxd tn
,-
B J '
0a OB
,
- _
. % 0 0 0%
A�.rg DL
gue : i o pw s fncton t aag ad
pbty(no l <
4 Smuln Rsus
n gu pblit tht no l ould be foun (nocl t du to oerg pms at th c dg) mped wth te sum f bok n rpping roblty or otnt plt powr of 2 dBm n Fg 4f 33 Bm as w n gu 5 for h ropod adp ti ghm

8/3/2019 Dynamic Pilot Power Control
http://slidepdf.com/reader/full/dynamic-pilot-power-control 4/5
ll 9 = 25 ".Ip. = 2
4.5%
.
3%
! 0
� 1 2
1
0
{ - t •
I I ,
• I ' j 1 I l
- ; - L "
I
- • !
·
0.% +--_-+I=:i=-�-_ 0
veg ol tbup [k$J
Figue Coaron e oalty tat n el an beound wh the bocng n doppn probbity r otnt p pwr dBm.
l Rb r kQ• Rl power �
4.
5
l. 0
.0% I--.-_t:_
a cl nhp1 :]
gu mpn o h paby ta o ce n ben wi e g n opping babiy o aontant i pwer 3 dB
In the llwing thee 3 ei a died at an otage pbaty o 2 The og pbay the um o
bkng prbility due o adin otl tec png pbty du t ad rdo nk qaty ndngton on wel th babity a no ellcud fund piot ower w st o conany dB ·the mstoen asn fo ug the no c eent d o crae pbem a te el edge whn th e lad incess.H n er c tpu f bot 68 bp cldbe uppord b w nant rg prlm c dg
ilt e BkJa., Adp1iv pi
.-4
03. 5%
� �
0.% 1-=r.� 4 60 80 0
A ig p
Fu 5 ompron th pbab tha no an beound wh te bocking nd drng ity ungh ropsd adp gotm.
O th ot hnd i th plt ower a t nany dBm okn/png the ma reon r e u-e te n c eent o nt ppa ere, an eageell hoght o oy 38 bp w eached sng th poe adt gothm, o ongdrppng mn ron o otage t he a an petag o o l" ent w teat e.g.bo 0.5% w h st is fuly oadd h ooe lad n ve cl huh f . b 5 s he eus
pwr ThRp @29 ue
Bm 68 p 9 )3 d 3 ks (% n ce"Adptive algorthm 8 b (4 no ce")
Tb Ret mry
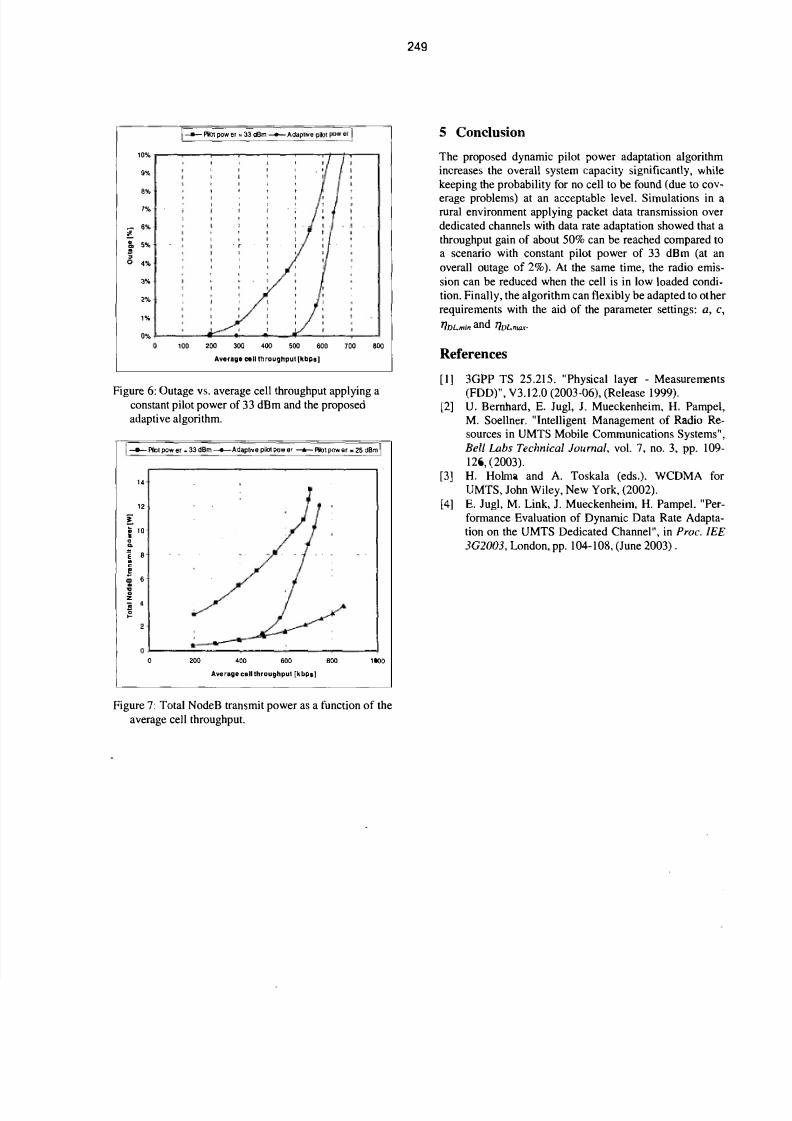
n gr 6 the otg pait s a ncto o h ag e thgpu s dd. A sen ung a on-snt pi wr of dBm p h on app-n the rped adpte lgoitm ady odabo at 2 out an verag el trouht 8 bp was ued e onant pot per 3 dB Bt pyig the pod dpv am
vrag ll tgp of abut 8 bp a b aheedwh s uent a gn f b ny gr 7 dpt tot tami pwer NeB fto h ege el thrgut th ens dsuse bv h rults y ndcatetat ou prpo at auss t NodB rdia ss pw han the c sn cnst pt pow Bm em a a lw tght t rdat pw s as h scai sng onst m n a g c adg moe pw sned to srve ers at t ll ed.
8/3/2019 Dynamic Pilot Power Control
http://slidepdf.com/reader/full/dynamic-pilot-power-control 5/5
\ dBm Aapte i power!
10%
9
%
l
5S
%
1
%10 3 60 7
vg
ig 6: Oge VS verae e rugp applng ansan p pwer f 3 dm nd te prpsepti algorthm
w " d ANe ef r " Bm
! �E 8.� oZ
o� 60 B
g huhu [kb]
ig : a NdB mt pwe a a non eaeg cel rougpu
29
5 Cu
h pped dynm pilt owe daptn athmnrae h oea s apa ekeping pobii f n e to e f due o c
eg pe) at an ptb eeL n in rra enrnmen applng pket a ranmion ededited anns wt dta ae adapa owed ht ghput gin b 50% an echd cmed en wth onstnt pi pw of d (a eal g of % At te ame m rd msn n e reded whn h ell is in w ded cndin Fin he gm n exy e dped t er requren wih th i f e pramee etn a c
nd '
Referees
[ G S 2521 Pc lae - Memet
F V20 (2006, (Res 199.[2] U Bd E Jg Mueenhm H Pmp
M. Soeln "Ingen Mngmen R R-oue n UM Me Comuniain stems Ta Ja l 7, n. p 1016, (2003).
Ho and A Toaa (ed WD for MS on ly e Yo 002).
] E ug Mkenh H. mpel "Peforane Evln na aa Rate dptt n e MTS edaed hnnel in o lG ndon, pp 104-108 (une 003