Download - Robo Soccerx
2015

Material needed for making a simple moving bot
• Motors• Wire• Chassis• Wheels• Switches• Battery
• And (ittu) sa dimaag

BASIC PARTS FOR OUR ROBO
1)Chassis: Is a basic framework on which a vehicle is built.

2) BatteriesRechargeable & non rechargeable

3) 8 or 10 wire bus

4)Connecting wiresfor connecting different components of robot.
5)Remote controlit can be used for controlling wired as well aswireless robots.
6)Switchcomponent of remote.
7)Tiresdifferent type of tires are available in marketbased on the type of robot for which it is going to be used.
8)Motorsthe no. of motors to be used depends on theparticipants. Its rpm plays a crucial role while controlling the robot (don't use motor of 500rpm or more motors).

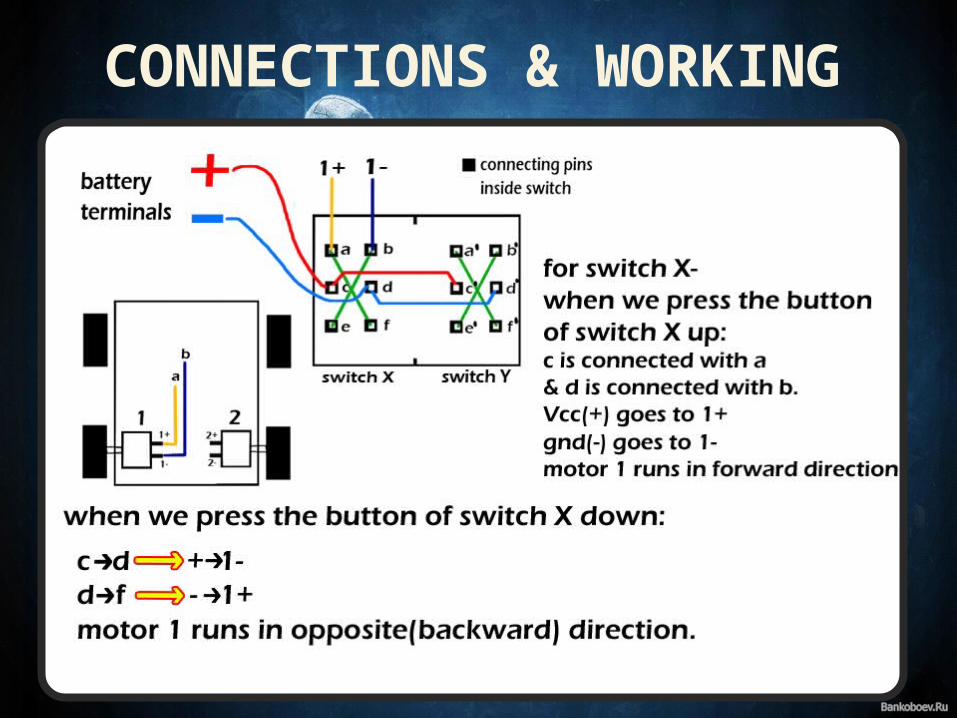
CONNECTIONS & WORKING
UP
DOWN
Remote control

CONNECTIONS & WORKING
CONNECTIONS & WORKING

WIRELESS• RF Module : Two RF work
together as Transmitter & Receiver. Also need encoders & decoders.
• X-Bee : Also work on radio frequencies . Commonly used with microcontrollers (ARDUINO).



• Bluetooth Module:It also work with some microcontroller .Range is lesser than RF & DTMF.
• DTMF: Work with an Android phone and communicate b/w phone & pc via WIFI or Bluetooth.

RULES• Each team consists of maximum 3
members
• Each robot must fit in 22cm x 20cm x 40cm(length X breadth X height)box.

• The robots may be controlled with wires or wirelessly. If they are controlled with wires, the wires have to be suspended from a height so that no wires get entangled.
• 8 or 10 wire bus must be at least 7 metres long.
• A standard tennis ball will be used for the game.
• Only electrical energy or mechanical energy can be used. No form of chemical energy or any other form of energy can be utilized.
• The maximum potential difference should not be more then 12V DC at any instant between any two points on the robot.

ROUND ONE
SIMPLE ONE-ON-ONE ELIMINATION ROUND.
3 MINUTES...THE TEAM SCORING MAXIMUM GOALS WINS .
BALL SHOULD NOT RISE ABOVE THE GROUND IN ROUND ONE

FINAL ROUNDFREE STYLE ROUND
NO RULES……ONLY GOALS……..USE ANY MEANS TO GOAL….(EXCEPT PICKING THE BALL BY YOURSELF ….. PLEASE USE ONLY YOUR ROBOS TO GOAL)U COULD DESTROY OPPONENTS BOT….. LIFT AND THROW THE BALL…ANY TYPE OF CUSTOMISATION IS ALLOWED!!
ONLY FOR FINAL ROUND
SIDE EVENTS
1) ROBO SPEED TEST(TIME EVENT).
2)ROBO SKILL TEST (PASS THE OBSTACLES).

PRIZES
1)WINNERS ROBO SOCCER 20152)RUNNER UP3)SECOND RUNNER UP4)MOST INNOVATIVE DESIGN

FOR QUERIESCONTACT US
Alok Ranjan83700 39457
Maharshi Dhada 95844 63558
Solar Singh96301 69918
Ayush Agarwal83580 48727







