
Jafari, H., et al.: New Method for Solving a Class of Fractional Partial Differential Equations... THERMAL SCIENCE: Year 2018, Vol. 22, Suppl. 1, pp. S277-S286 S277
NEW METHOD FOR SOLVING A CLASS OF FRACTIONAL PARTIAL DIFFERENTIAL EQUATIONS WITH APPLICATIONS
by
Hossein JAFARI a,b* and Haleh TAJADODI ca Department of Mathematical Sciences, University of South Africa, Pretoria, South Africa
b Department of Mathematics, University of Mazandaran, Babolsar, Iran c Department of Mathematics, University of Sistan and Baluchestan, Zahedan, Iran
Original scientific paper https://doi.org/10.2298/TSCI170707031J
In this work we suggest a numerical approach based on the B-spline polynomial to obtain the solution of linear fractional partial differential equations. We find the operational matrix for fractional integration and then we convert the main prob-lem into a system of linear algebraic equations by using this matrix. Examples are provided to show the simplicity of our method.Key words: fractional partial differential equations, linear B-spline function,
operational matrix, Caputo derivative
Introduction
Over the last decades fractional calculus were not useful application in physics and mathematical, albeit having a long history. In recent years a number of books [1-5] on fractional calculus were published.
Compared with ODE, fractional order differential equations (FDE) has arbitrary or-der derivatives and integrals. Our purpose is essentially useing the linear B-spline functions to solve PDE in fractional calculus. We paid attention on the following a class of fractional PDE (FPDE):
( , ), 0 , 1γ µ
γ µ µ γ∂ ∂+ = < ≤
∂ ∂z z k x t
x t (1)
s.t
0 1 0 2| ( ), | ( )ψ ψ= =
∂ ∂= =
∂ ∂x tz zt xt x
(2)
1 2(0, ) ( ), ( ,0) ( )η η= =z t t z x x (3)
where 1 2 1 2, , , ,ψ ψ η ηk are the known function and ( , )z x t are the unknown functions. The /γ γ∂ ∂z x and /µ µ∂ ∂z t are the fractional Caputo derivative that is given:
( )
( , ) , ( 1, ),( , )
( , ),
mm
m
m
z x tI m m mz x tx
xz x t m
γγ
γ
γ
γ
− ∂∈ − ∈Ν∂ = ∂
∂ =
(4)
* Corresponding author, e-mail: [email protected]

Jafari, H., et al.: New Method for Solving a Class of Fractional Partial Differential Equations... S278 THERMAL SCIENCE: Year 2018, Vol. 22, Suppl. 1, pp. S277-S286
Note that:
10
1 ( , )( , ) d , 0, 0( ) ( )
x
xz tI z x t x
xγ
γ
τ τ γγ τ −= > >
Γ −∫ (5)
( 1) , 0, 0, 1(1 )
x x xx
γ δδ γ
γ
δ δ µδ γ
−∂ Γ += > > > −
∂ Γ + − (6)
1
0
( , ) (0 , )( , ) , 1!
j jm
x jj
z x t z t xI z x t m mx x j
γγ
γ γ+−
=
∂ ∂= − − < ≤
∂ ∂∑ (7)
where γI is Riemann-Liouville integral operator. There are numerous methods to solve FPDE. These methods include Adomian decomposition method [6], Fractional subequation meth-od [7], homotopy perturbation method [8], collocation method [9] , homotopy analysis method [10], He’s variational iteration method [11], and other methods [12-17].
In the current paper, we suggest the linear B-spline operational matrix method to solve the FPDE. At the first, we approximate z in the eq. (1) by linear B-spline functions of unknown coefficients. Then using operational matrixes, the eq. (1) convert to a set of algebraic equations. Recently, FPDE have been solveing using Linear B-splines operational matrix of fractional derivatives and B-spline wavelet collocation method [14, 18]. Also Haar wavelet method used to sole these equations [19, 20].
The B-spline function and operational matrixes for fractional integration
Linear B-spline function on [0,1] The mth order cardinal B-spline ( )mN x has the knote sequence { , 1,0,1, }− Also
there are polynomials of order m (degree 1−m ) between the knots. The B-spline functions for 2≥m on [0,1] has the following form:
1
0
1( ) ( 1) ( )( 1)!
−+
=
= − − −
∑m
k mm
k
mN x x k
km (8)
where supp[ ( )] [0, ]=mN x m and for 1=m the characteristic function is 1 [0,1]( ) ( )χ=N x x . Here, we apply the linear B-spline function of order 2 in the following form [21]:
2
20
, [0,1),2
( ) ( 1) ( ) 2 , [1,2),0, otherwise
+=
∈ = − − = − ∈
∑ k
k
x xN x x k x x
k (9)
Let , 2( ) (2 ), ,= − ∈jj kN x N x k k j Z and , ( ) =j kB x supp , ,[ ] close{ : 0}= ≠j k j kN x N .
It can show that their support is:
, [2 ,2 (2 )], ,− −= + ∈j jj kB k k k j Z (10)
Define the set of indices:
,{ : [0,1] 0}= ∩ ≠j j kS k B
According to eqs. (9) and (10), the minimum and maximum of { }jS are –1 and 2 1−j . Because support of ,j kN can be outside of [0,1], so we have to define ,φ j k on [0,1]:

Jafari, H., et al.: New Method for Solving a Class of Fractional Partial Differential Equations... THERMAL SCIENCE: Year 2018, Vol. 22, Suppl. 1, pp. S277-S286 S279
, , [0,1]( ) ( ),φ χ= ∈j k j kN x x j Z (11)
The function approximation
We can expand function ( )f x by ,φ j k for a fixed =j J :
2 1
,1
( ) ( ) ( )φ−
=−
≈ = Φ∑J
Tk J k J
kf x c x C x (12)
where the vectors C and Φ J are:
11 0 2[ , , , ]−−= J
TC c c c (13)
1, 1 ,0 ,2( ) [ ( ), ( ), , ( )]φ φ φ −−Φ = J
TJ J J J
x x x x (14)
with
1
1
0
( ) ( )d − = Φ ∫T T
JC f x x x P (15)
and symmetric matrix is given:
1
20
(2 1) (2 1)
1 112 241 1 124 6 241( ) ( )d
21 1 124 6 24
1 124 12
−
+ × +
= Φ Φ =
∫
J J
TJ J JP x x x (16)
Also any function ( , )f x t could expand by linear B-spline functions:
2 1 2 1
, ,1 1
( , ) ( ) ( ) ( ) ( )J J
Tik J i J k J J
i kf x t f x t x F tφ φ
− −
=− =−
≈ ≈ Φ Φ∑ ∑ (17)
where , , ,( ), ( , ), ( )φ φ= ⟨ ⟨ ⟩⟩i k J i J kf x f x t t .
Operational matrix for γIIntegration of the vector Φ J , leads to:
( ) ( ),γ γΦ ≈ Ι Φx J JI x x (18)
where γΙ is the (2 1) (2 1)+ × +J J operational matrix of fractional integration. We obtain the matrix γΙ :
1 1
1
0 0
( ) ( )d ( ) ( )dγ γ γΙ − = Φ Φ = Φ Φ
∫ ∫
T Tx J J x J JI x x x I x x x P (19)

Jafari, H., et al.: New Method for Solving a Class of Fractional Partial Differential Equations... S280 THERMAL SCIENCE: Year 2018, Vol. 22, Suppl. 1, pp. S277-S286
where
1
0
( ) ( )dγ= Φ Φ∫ Tx J JE I x x x (20)
In eq. (20), ,[ ]= i kE a is a (2 1) (2 1)+ × +J J matrix:
1
, , ,0
( ) ( )d , , 1 ,2 1γφ φ= = − −∫
Ji k x J k J ia I x x x i k (21)
and , ( )γφx J kI x according eq. (11) can be obtain:
2
,0
2 1
0
1
11
1
2( ) ( 1) 2 ( )
22 ( 1) 2 ( )(2 )
0, ,2
1(2 ) , ,2 2 21 2(2 ) (2 ) 2 2 ( 1) ,
2 2
(2 ) 2
x xi J
J ki
Ji J
i
J
JJ J J
J JJ J
J
I x I x k ii
x k ii
kx
k kx k x
k kx k x k x
x k
γ γ
γ γ
γγ
γγ
γ
φ
γ
γ
+=
−+
+=
+−
++
+
= − − + = = − − + = Γ +
<
+− ≤ <
=+ +Γ + − − − + ≤ <
− −
∑
∑
1 1 22 ( 1) 2 ( 2) ,2
J JJ
kx k x k xγ γ+ +
+ − + + − + ≤
(22)
So that , 1( )γφ −x JI x and ,2 1
( )γφ−x JJ
I x obtain:
1
, 11 1
1( 1)(2 ) (2 ) ,2 2( )1( 2) ( 1)(2 ) (2 ) (2 1) ,2
J JJ J
x JJ J J
J
x x xI x
x x x x
γ γγ
γ
γ γ γ
γφ
γ γ
+−
−+ +
+ − <= Γ + + − + − ≤
(23)
1,2 1
1 1
2 10,2
2 2 1 1( ) (2 2 1) ,( 2) 2 2
(2 2 1) (2 2 ) (2 2 1) , 1
J
J
J
J JJ J
x J JJ
J J J J J J
x
I x x x
x x x x
γγ γ
γ γ γ
φγ
γ
−+
−
+ +
−<
−= − + ≤ <Γ +
− + − − − + + ≤
(24)
by substituting , ( ), 1, ,2 1γϕ = − −
Jx J kI x k in eq. (21), we can find matrix E:

Jafari, H., et al.: New Method for Solving a Class of Fractional Partial Differential Equations... THERMAL SCIENCE: Year 2018, Vol. 22, Suppl. 1, pp. S277-S286 S281
1 2 3 2 2 1
1 2 2 1 2
1 2 2 2 2 1( 1)
1 2 3
1 2
1 (2 1) (2 1)
10 1
2 0( 4)
0 00 0 0 10 0 0 0 1
γ
κ κ κ κ κµ µ µ κ
µ µ µ κ
γµ µ κ
µ κκ
+
−
− −− +
+ × +
= Γ +
J J
J J
J J
J J
J
E (25)
where
[ ] [ ][ ]
21 2
3 2 22
2
3 2 2 12 1
3 3 51 2
32
2, ( 1)2 2 3( 1) 3( 1) 2 3( 1) ( 1)
( 1) ( 2) , 1, ,2 2
(2 2) 2( 2 4)(2 1) ( 2 1) 3 5 4.2 (2 )
2 4, 3 2 6( 2) 4
J
i
J
J J J J J J
i
i i i i i
i i i
k
i
γ
γ γ γ
γ
γ γ γ
γ γ γ
γ
κ γ κ γ γ
κ γ γ
γ
γ γ γ
µ µ
κ
+
+ + ++
+
+ + ++
+ + +
++
= + = + − −
= − + − − − − − + +
+ − − + = −
= − + − + − + − + + + −
= − = − +
= + −
3 3 3 3( 1) 6 4( 1) ( 2) , 2, ,2 2Ji i i i iγ γ γ γ+ + + ++ + − − + − = −
Numerical solution of FPDE
Consider eq. (1) with conditions (2) and (3). First, we expand
2
( ) ( )∂≈ Φ Φ
∂ ∂TJ J
z x Z tx t
then we have:
2
10 2 2
0 0
d | ( ) ( )d ( ) ( ) ( ) ( )ψ ψ=
∂ ∂ ∂= + ≈ Φ Φ + = Φ Ι Φ +
∂ ∂ ∂ ∂∫ ∫t t
T Tt J J J J
z z zt x Z t t x x Z t xx x t x
(26)
2
10 1 1
0 0
d | ( ) ( )d ( ) ( )[ ] ( ) ( )ψ ψ=
∂ ∂ ∂= + ≈ Φ Φ + = Φ Ι Φ +
∂ ∂ ∂ ∂∫ ∫x x
T T Tx J J J J
z z zx x Z t x t x Z t tt x t x
(27)
So unknown function ( , )z x t obtain:
1 12 2
0
( , ) ( )[ ] ( ) ( )d ( )ψ η≈ Φ Ι Ι Φ + +∫x
T TJ Jz x t x Z t s s x (28)
Then we have:
1 1 1 1 1 1
2 2( ) ( ) ( ) ( )[ ] ( ) ( )γ
γγ γ γ
γ ψ ψ− − − −∂ ∂ = ≈ Φ Ι Φ + = Φ Ι Ι Φ + ∂ ∂
T T Tx x J J J J x
z zI I x Z t x x Z t I xx x
(29)
1 1 1 1 1 1
1 1( )[ ] ( ) ( ) ( )[ ] ( ) ( )T T T Tt t J J J J t
z zI I x Z t t x Z t I xt t
µµ
µ µ µµ ψ ψ
− − − −∂ ∂ = ≈ Φ Ι Φ + = Φ Ι Ι Φ + ∂ ∂ (30)
where 1 12 1( , ) ( ) ( )γ µψ ψ− −= +x tg x t I x I t that can be written:

Jafari, H., et al.: New Method for Solving a Class of Fractional Partial Differential Equations... S282 THERMAL SCIENCE: Year 2018, Vol. 22, Suppl. 1, pp. S277-S286
( , ) ( ) ( )≈ Φ ΦTJ Jg x t x G t (31)
and ,[ ]= i jG g is a (2 1) (2 1)+ × +J J matrix. Also we approximate functions ( , )k x t by the linear B-spline basis:
( , ) ( ) ( )≈ Φ ΦTJ Jk x t x K t (32)
Now, by substituting eqs. (29)-(32) into eq. (1), we obtain:
1 1 1 1( )[ ] ( ) ( )[ ] ( ) ( ) ( ) ( ) ( )γ µ− −Φ Ι Ι Φ + Φ Ι Ι Φ + Φ Φ = Φ ΦT T T T T TJ J J J J J J Jx Z t x Z t x G t x K t (33)
or
{ }1 1 1 1( ) [ ] [ ] ( ) 0γ µ− −Φ Ι Ι + Ι Ι + − Φ =T T TJ Jx Z Z G K t (34)
Finally, eq. (33) give linear system of algebraic equations in the following form:
1 1 1 1[ ] [ ] 0γ µ− −+ + − =T TI ZI I ZI G K (35)
So Z can be computed by solving previous system. Consequently, we get the numeri-cal solution of ( , )z x t using eq. (28).
Numerical examples
Now we solve four examples that shows the efficiency of our technique.Example 1. Analyze the following FPDE [19]:
( )
1/4 1/4 3/4 3/4
1/4 1/4
4( ) , , [0,1]3 3/4
∂ ∂ ++ = ∈
∂ ∂ Γz z x t xt x t
x t (36)
subject to:
0 0| 0, | 0= =
∂ ∂= =
∂ ∂x tz zt x
(37)
(0, ) 0, ( ,0) 0= =z t z x (38)
That exact solution is xt which is studied by Wang et al. [19] by using Haar wavelet. Here we applied the linear B-spline function to solve it. By using eqs. (26) and (27), we have:
2
10
0 0
d | ( ) ( )d ( ) ( )=
∂ ∂ ∂= + ≈ Φ Φ = Φ Ι Φ
∂ ∂ ∂ ∂∫ ∫t t
T Tt J J J J
z z zt x Z t t x Z tx x t x
(39)
2
10
0 0
d | ( ) ( )d ( )[ ] ( )=
∂ ∂ ∂= + ≈ Φ Φ = Φ Ι Φ
∂ ∂ ∂ ∂∫ ∫x x
T T Tx J J J J
z z zx x Z t x x Z tt x t t
(40)
So unknown function ( , )z x t obtain:
1 1 1 1( , ) ( )[ ] ( ) (0, ) ( )[ ] ( )≈ Φ Ι Ι Φ + = Φ Ι Ι ΦT T T TJ J J Jz x t x Z t z t x Z t (41)
According eqs. (29) and (30), we have:
1/4 3/4 3/4 1 3/4 1
1/4 [ ( ) ( )] ( )[ ] ( )T T Tx x J J J J
z zI I x Z t x Z tx x∂ ∂
= ≈ Φ Ι Φ = Φ Ι Ι Φ∂ ∂
(42)

Jafari, H., et al.: New Method for Solving a Class of Fractional Partial Differential Equations... THERMAL SCIENCE: Year 2018, Vol. 22, Suppl. 1, pp. S277-S286 S283
1/4 3/4 1/4 1 1 3/4
1/4 { ( )[ ] ( )} ( )[ ] ( )T T T Tt t J J J J
z zI I x Z t x Z tt t∂ ∂
= ≈ Φ Ι Φ = Φ Ι Ι Φ∂ ∂
(43)
Similarly we approximate 3/4 3/44( )/3 (3/4)+ Γx t xt :
( )
3/4 3/44( ) ( ) ( )3 3/4
+≈ Φ Φ
ΓTJ J
x t xt x K t (44)
and ,[ ]= i jK k is a (2 1) (2 1)+ × +J J matrix. Now by substituting eqs. (42)-(44) into eq. (36), we have:
3/4 1 1 3/4( )[ ] ( ) ( )[ ] ( ) ( ) ( )Φ Ι Ι Φ + Φ Ι Ι Φ = Φ ΦT T T T TJ J J J J Jx Z t x Z t x K t , (45)
or
3/4 1 1 3/4( ){[ ] [ ] } ( ) 0T T TJ Jx ZI Z K tΦ Ι + Ι Ι − Φ = (46)
Finally, we obtain:
3/4 1 1 3/4[ ] [ ] 0Ι Ι + Ι Ι − =T TZ Z K (47)
That by solving system eq. (47) we can compute Z. The numerical results for J = 3 and the exact solutions are plotted in figs. 1 and 2, re-
spectively. From figs. 1 and 2 is obvious that numerical solutions converge to the exact solution.
Figure 1. Numerical solution for example 1 when J = 3 (for color image see journal web site)
Figure 2. Exact solution for eq. (36) (for color image see journal web site)
Example 2. Solve the following fractional PDE [19]:
1/3 1/2 5/3 5/3
1/3 1/2
(3) (3) , 0 , 1(8/3) (5/2)
∂ ∂ Γ Γ+ = + ≤ ≤
∂ ∂ Γ Γz z x t x t
x t (48)
subject to:
0 0| 2 , | 2= =
∂ ∂= =
∂ ∂x tz zt xt x
(49)
2 2(0, ) , ( ,0)= =z t t z x x (50)
That exact solution is 2 2 .+x t

Jafari, H., et al.: New Method for Solving a Class of Fractional Partial Differential Equations... S284 THERMAL SCIENCE: Year 2018, Vol. 22, Suppl. 1, pp. S277-S286
This example is studied by Wang et al. [19] using Haar wavelet. Here we applied the linear B-spline function to solve it. Let 2 / ( ) ( )∂ ∂ ∂ ≈ Φ ΦT
J Jz x t x Z t then by using eqs. (26) and (27), we have:
2
10 0
0 0
d | ( ) ( )d | ( ) ( ) 2= =
∂ ∂ ∂ ∂= + ≈ Φ Φ + = Φ Ι Φ +
∂ ∂ ∂ ∂ ∂∫ ∫t t
T Tt J J t J J
z z z zt x Z t t x Z t xx x t x x
(51)
2
10 0
0 0
d | ( ) ( )d | ( )[ ] ( ) 2= =
∂ ∂ ∂ ∂= + ≈ Φ Φ + = Φ Ι Φ +
∂ ∂ ∂ ∂ ∂∫ ∫x x
T T Tx J J x J J
z z z zx x Z t x x Z t tt x t t t
(52)
So unknown function ( , )z x t obtain:
1 1 2 1 1 2 2( , ) ( )[ ] ( ) (0, ) ( )[ ] ( )≈ Φ Ι Ι Φ + + = Φ Ι Ι Φ + +T T T TJ J J Jz x t x Z t x z t x Z t x t (53)
Then
2/3
1/32/3 1 2/3 1 5/3
1/3
2 (2)[ ( ) ( ) 2 ] ( )[ ] ( )(8/3)
T T Tx x J J J J
z zI I x Z t x x Z t xx x∂ ∂ Γ
= ≈ Φ Ι Φ + = Φ Ι Ι Φ +∂ ∂ Γ
(54)
1/2 1/2 1/2 1 1 1/2 3/2
1/2
2 (2){ ( )[ ] ( ) 2 } ( )[ ] ( )(5/2)
T T T Tt t J J J J
z zI I x Z t t x Z t tt t∂ ∂ Γ
= ≈ Φ Ι Φ + = Φ Ι Ι Φ +∂ ∂ Γ
(55)
Substituting eqs. (54) and (55) into eq. (48), we have:
2/3 1 1 1/2( )[ ] ( ) ( )[ ] ( ) 0Φ Ι Ι Φ + Φ Ι Ι Φ =T T T TJ J J Jx Z t x Z t (56)
Finally, we obtain:
2/3 1 1 1/2[ ] [ ] 0Ι Ι + Ι Ι =T TZ Z (57)
So by solving previous system we achieve 0=z . Consequently by substituting 0=z in eq. (53), we obtain the exact solution of eq. (48) that is 2 2( , ) .= +z x t x t
Example 3. Now we examine the numerical solution of the FPDE [19]:
2 2 2 2(3) ( 1) (3)( 1) , 0 , 1(3 ) (3 )
γ µ γ µ
γ µ γ µ
− −∂ ∂ Γ + Γ ++ = + ≤ ≤
∂ ∂ Γ − Γ −z z x t x t x t
x t (58)
subject to:
0 0| 2 , | 2= =
∂ ∂= =
∂ ∂x tz zt xt x
(59)
2 2(0, ) 1, ( ,0) 1= + = +z t t z x x (60)
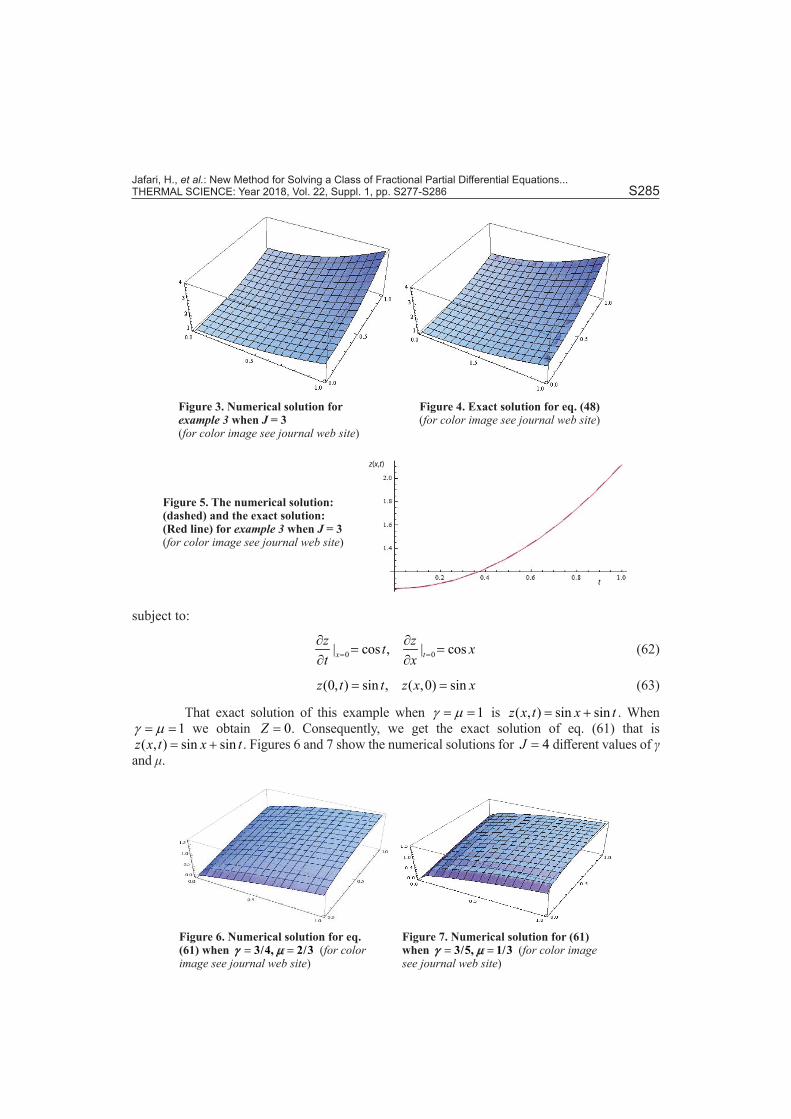
That exact solution of eq. (58) is 2 2( 1)( 1).+ +t xFigures 3 and 4 show the approximation and exact solution of ( , )z x t for 3=J when
1/2, 1/3γ µ= = , respectively. The numerical results comparing the exact solution for 0.25, 3= =x J are shown in fig. 5. We can see numerical results converge to exact solution.
Example 4. Now we examine the numerical solution of the FPDE [19]:
cos cos , 0 , 1z z x t x tx t
γ µ
γ µ
∂ ∂+ = + ≤ ≤
∂ ∂ (61)
Jafari, H., et al.: New Method for Solving a Class of Fractional Partial Differential Equations... THERMAL SCIENCE: Year 2018, Vol. 22, Suppl. 1, pp. S277-S286 S285
subject to:
0 0| cos , | cos= =
∂ ∂= =
∂ ∂x tz zt xt x
(62)
(0, ) sin , ( ,0) sin= =z t t z x x (63)
That exact solution of this example when 1γ µ= = is ( , ) sin sin= +z x t x t . When 1γ µ= = we obtain 0=Z . Consequently, we get the exact solution of eq. (61) that is
( , ) sin sin= +z x t x t . Figures 6 and 7 show the numerical solutions for 4=J different values of γ and μ.
Figure 3. Numerical solution for example 3 when J = 3 (for color image see journal web site)
Figure 4. Exact solution for eq. (48) (for color image see journal web site)
z(x,t)
t
Figure 5. The numerical solution: (dashed) and the exact solution: (Red line) for example 3 when J = 3 (for color image see journal web site)
Figure 6. Numerical solution for eq. (61) when = =3/4, 2/3γ µ (for color image see journal web site)
Figure 7. Numerical solution for (61) when = =3/5, 1/3γ µ (for color image see journal web site)

Jafari, H., et al.: New Method for Solving a Class of Fractional Partial Differential Equations... S286 THERMAL SCIENCE: Year 2018, Vol. 22, Suppl. 1, pp. S277-S286
Conclusion
In the present paper we used operational matrix of fractional integration based on lin-ear B-spline function to solve the FPDE. We expand the unknown function with chosen polyno-mial. The problem has been reduced to a system of algebraic equations. Application examples show good coincidence of the numerical result with exact solution. We used Mathematica for computations.
References[1] Gorenflo, R., et al., Fractional Calculus and Continuous-Time Finance, III. the Diffusion Limit, in: Math-
ematical Finance, Trends Math., (Eds., K., Tang) 2001, pp. 171-180[2] Jafari, H., An Introduction to Fractional Differential Equations, (in Persian), Mazandaran University
Press, Babolsar, Iran, 2013[3] Kilbas, A. A., et al., Theory and Application of Fractional Differential Equations, Elsevier, Amsterdam, The
Netherland, 2006[4] Podlubny, I., Fractional Differential Equations, Academic Press, New York, USA, 1999[5] Samko, S., et al., Fractional Integrals and Derivatives: Theory and Applications, Gordon and Breach
Science Publishers, Yverdon, Switzerland, 1993[6] Jafari, H., et al., A Decomposition Method for Solving the Fractional Davey-Stewartson Equations, Inter-
national Journal of Applied and Computational Mathematics, 1 (2015), 4, pp. 559-568[7] Jafari, H., et al., Application of a Homogeneous Balance Method to Exact Solutions of Nonlinear Frac-
tional Evolution Equations, Journal of Computational and Nonlinear Dynamics, 9 (2014), 2, 021019[8] Jafari, H., Momani, S., Solving Fractional Diffusion and Wave Equations by Modified Homotopy Pertur-
bation Method, Phys Lett A, 370 (2007), 5-6, pp. 388-396[9] Tian, W., Polynomial Spectral Collocation Method for Space Fractional Advection-Diffusion Equation,
Numerical Methods for Partial Differential Equations, 30 (2014), 2, pp. 514-535[10] Jafari, H., et al., Homotopy Analysis Method for Solving Abel Differential Equation of Fractional Order,
Central European Journal of Physics, 11 (2013), 10, pp. 1523-1527[11] Jafari, H., et al., Solutions of the Fractional Davey-Stewartson Equations with Variational Iteration Meth-
od, Romanian Reports In Physics, 64 (2012), 2, pp. 337-346[12] Huang, Q., et al., A Finite Element Solution for the Fractional Advection-Dispersion Equation, Advances
in Water Resources, 31 (2008), 12, pp. 1578-1589[13] Momani, S. Odibat, Z., Generalized Differential Transform Method for Solving a Space and Time Frac-
tional Diffusion-Wave Equation, Physics Letters A, 370 (2007), 5-6, pp. 379-387[14] Li, X., Numerical Solution of Fractional Differential Eqiations Using Cubic B-Spline Wavelet Collocation
Method, Commun Nonlinear Sci Numer Simulat, 17 (2012), 10, pp. 3934-3946[15] Lotfi, A., et al., A Numerical Technique for Solving Fractional Optimal Control Problems, Comput. Math.
Appl,. 62 (2011), 3, pp. 1055-1067[16] Rostamy, D., et al., Solving Multi-Term Orders Fractional Differential Equations by Operational Matrices
of BPs with Convergence Analysis, Romanian Reports in Physics, 65 (2013), 2, pp. 334-349[17] Saadatmandi, A., Dehghan, M., A New Operational Matrix for Solving Fractional-Order Differential
Equations, Computers and Mathematics with Applications, 59 (2010), 3, pp. 1326-1336[18] Lakestani, M., et al., The Construction of Operational Matrix of Fractional Derivatives Using B-Spline
Functions, Commun Nonlinear Sci Numer Simulat, 17 (2012), 3, pp. 1149-1162[19] Wang, L., et al., Haar Wavelet Method for Solving Fractional Partial Differential Equations Numerically,
Applied Mathematics and Computation, 227 (2014), Jan., pp. 66-76[20] Wu, J. L., A Wavelet Operational Method for Solving Fractional Partial Differential Equations Numerical-
ly, Applied Mathematics and Computation, 214 (2009), 1, pp. 31-40[21] Boor, C. de, A Practical Guide to Spline, Springer-Verlag, Berlin, 1978
Paper submitted: July 7, 2017Paper revised: December 15, 2017Paper accepted: January 10, 2018
© 2018 Society of Thermal Engineers of SerbiaPublished by the Vinča Institute of Nuclear Sciences, Belgrade, Serbia.
This is an open access article distributed under the CC BY-NC-ND 4.0 terms and conditions







