Download - NASA CR-II2I40
NASA CR-II2I40
VIBRATION AND DAMPING OF
LAMINATED, COMPOSITE-MATERIAL PLATES
INCLUDING THICKNESS-SHEAR EFFECTS
Final Report (Part II)NASA Research Grant NGR-37-003-055
by
C.W. Bert & C.C. SiuSchool of Aerospace, Mechanical and Nuclear Engineering
The University of OklahomaNorman, Oklahoma 73069
Prepared for
National Aeronautics -.and Space AdministrationWashington, D.C.
\ March 1972
https://ntrs.nasa.gov/search.jsp?R=19720022240 2018-02-12T19:37:57+00:00Z
1 NR/(SANCR- II2I404. Title and Subtitle
VIBRATION AND DAMPING IMATERIAL PLATES INCLUDIN
2. Government Accession No.
DF LAMINATED, COMPOSITE-IG THICKNESS -SHEAR EFFECTS
7. Author(s)
C. W. Bert and C. C. Siu
9. Performing Organization Name and AddressSchool of Aerospace, Mechanical, and Nuclear EngineeringThe University of OklahomaNorman, Oklahoma 73069
12. Sponsoring Agency Name and Address
National Aeronautics and Space AdministrationWashington, D.C. 20546
3. Recipient's Catalog No.
5. Report Date
6. Performing Organization Code
8. Performing Organization Report No.
10. Work Unit No.
501-22-03-0311. Contract or Grant No.
NGR-37-003-05513. Type of Report and Period Covered
Contractor Report14. Sponsoring Agency Code
15. Supplementary Notes
16. Abstract
An analytical investigation of sinusoidally forced vibration of laminated, anisotropicplates including bending-stretching coupling, thickness-shear flexibility, all three typesof inertia effects, and material damping was conducted. The analysis begins with theanisotropic stiffness and damping constitutive relations for a single layer and proceedsthrough the analogous relations for a laminate. Then the various types of energyand work terms are derived and the problem is formulated as an eigenvalue problemby application of the extended Rayleigh-Ritz Method. The effects of thickness-sheardeformation are considered by the use of a shear correction factor analogous to thatused by Mindlin for homogeneous plates. The general analysis is applicable to plateswith any combination of natural boundary conditions at their edges.
Natural frequencies of boron/ epoxy plates calculated on the basis of two differentresonance criteria (peak-amplitude and modified Kennedy-Pancu techniques) and theassociated nodal patterns are in good agreement with previously published experimentaldata.
17. Key Words (Suggested by Author(s))
Composite materialsVibration dampingStiffnessVibration , Micromechanics
19. Security dassif. (of this report)
Unclassified
18. Distribution Statement
Unclassified - Unlimited
20. Security Qassif. (of this page)
Unclassified21. No. of Pages 22. Price*
245
For sale by the National Technical Information Service, Springfield, Virginia 22151
VIBRATION AND DAMPING OF
LAMINATED, COMPOSITE-MATERIAL PLATES INCLUDING THICKNESS-
SHEAR EFFECTS
CONTENTS
Page
ABSTRACT lv
SYMBOLS vi
I. INTRODUCTION 1
1.1 Introductory Remarks 1
1.2 A Brief Survey of Selected Vibratlonal Analyses ofLaminated Plates 4
II. FORMULATION OF THE THEORY 9
2.1 Hypotheses 9
2.2 Kinematics 10
2.3 Stiffness Constitutive Relations 11
2.4 Strain Energy 15
2.5 Damping Coefficients and Dissipative Energy 17
2.6 Kinetic Energy 18
2.7 Work Done by External Forces 19
2.8 Application of the Extended Rayleigh-Ritz Method 20
2.9 Reduction to Matrix Form 23
III. DERIVATION OF THICKNESS-SHEAR FACTORS FOR LAMINATES 25
3.1 Static Approach 26
3.2 Dynamic Approach 30
IV. MODAL FUNCTIONS USED FOR VARIOUS PLATE BOUNDARY CONDITIONS 32
4.1 Simply Supported on All Edges 32
4.2 Fully Clamped on All Edges 33
4.3 Free on All Edges 34
V. NUMERICAL RESULTS AND COMPARISON WITH RESULTS OF OTHERINVESTIGATORS 35
5.1 Thickness-Shear Factors for Laminates 35
5.2 Plate Simply Supported on All Edges 36
5.3 Plate Free on All Edges 38
VI. CONCLUSIONS 42
APPENDIXES
A. NOTATION AND TRANSFORMATION FOR ELASTIC COEFFICIENTS 44
B. MODELS AND MEASURES OF MATERIAL DAMPING 50
Bl. Mathematical Models for Material Damping 50
B2. Measures of Material Damping 62
B3. Inter-Relationships Among Various Measures of Dampingfor Homogeneous Materials 67
C. DERIVATION OF ENERGY DIFFERENCE 76
D. COMPLETE ENERGY EXPRESSIONS 79
Dl. The Energy Difference 79
D2. Equations for Minimizing the Energy Difference 80
E. DERIVATION OF THICKNESS-SHEAR FACTOR FOR THE THREE-LAYER,SYMMETRICALLY LAMINATED CASE USING THE DYNAMIC APPROACH 85
El. Dynamic Elasticity Analysis of an Individual LayerUndergoing Pure Thickness-Shear Motion 85
ii
E2. Dynamic Elasticity Analysis for Three-Layer,Symmetrically Laminated Case gg
E3. Dynamic Analysis of a Symmetrically LaminatedTimoshenko Beam Undergoing Pure Thickness-Shear Motion 88
E4. Determinations of the Thickness-Shear Factor 91
F. COMPLEX STIFFNESS COEFFICIENTS FOR A LAMINATE HAVING ALTERNATINGPLIES OF TWO DIFFERENT COMPOSITE MATERIALS 92
Fl. Introduction 92
F2. Analysis 93
G. IDENTIFICATION OF INTEGRAL FORMS 100
Gl. Trigonometric Integrals 100
G2. Combination Trigonometric-Beam Type Integrals 107
H. EVALUATION OF EXPERIMENTAL METHODS USED TO DETERMINE MATERIALDAMPING IN COMPOSITE MATERIALS 109
I. DISCUSSION ON SYMMETRY OF THE ARRAY OF CONSTITUTIVE COEFFICIENTS 123
J. COMPUTER PROGRAM DOCUMENTATION 126
REFERENCES , 128
TABLES 147
FIGURES 157
COMPUTER PROGRAM LISTING 180
iii
ABSTRACT
This report is concerned with analytical investigation of si-
nusoidally forced vibration of laminated, anisotropic plates including
bending-stretching coupling, thickness-shear flexibility, all three
types of inertia effects, and material damping.
In the analysis the effects of thickness-shear deformation are
considered by the use of a shear correction factor K, analogous to that
used by Mindlin for homogeneous plates. Two entirely different approaches
for calculating the thickness-shear factor for a laminate are presented.
Numerical examples indicate that the value of K depends on the layer
properties and the stacking sequence of the laminate.
The general analysis is applicable to plates with any combination
of natural boundary conditions at their edges. The analysis begins with
the anisotropic stiffness and damping constitutive relations for a single
layer and proceeds through the analogous relations for a laminate. Then
the various types of energy and work terms are derived and the problem is
formulated as an eigenvalue problem by application of the extended
Rayleigh-Ritz method.
The first five resonant frequencies of boron/epoxy plates with all
edges free are calculated on the basis of two different resonance criteria:
the peak-amplitude and modified Kennedy-Pancu techniques. The results show
that the resonant frequencies obtained by the two techniques differ by only
a very small amount, and are in good agreement with the results obtained
iv
both experimentally and analytically by Clary. Furthermore, the nodal
patterns obtained agree satisfactorily with those of Clary. Finally,
the damping values in this investigation are in good agreement with the
experimental ones obtained by Clary.
SYMBOLS
A cross-sectional area
AQ area involved in shear-stress integration (fig. 8)
A.,B constants depending upon the boundary conditions (Appendix E)
Aj hereditary constants, eq. (B-21)
A.. stretching stiffness of the plate
a length of plate
a(x.) ,a(x2) wave amplitudes at positions x. and x«
a.,a _,a free-vibration amplitudes corresponding to the i-th,1 (i+l)th, and (i+n)th cycles
a initial amplitude
B. . bend ing-stretching coupling stiffness of the plate
B. . complex stiffness coefficient
b width of plate
b material damping coefficient defined in eq. (B-10)
b critical material damping coefficient
C, damping coefficient defined in eq. (B-22)
C' damping coefficient defined in eq. (B-8)
C. constants depending upon the initial conditions
C. . Cauchy elastic coefficient
C.. complex version of C..
C ' effective stiffness coefficients defined followingJ ' eq. (F-7)
C ,C characteristic parameters tabulated in ref. 44m n
c viscous damping coefficient
VI
c Kelvin-Voigt complex damping coefficient
c critical value of c
c shear wave-propagation velocitys
D total dissipative energy
D energy dissipated per unit of plate area
D.. bending and twisting stiffnesses of the plate
D.. complex version of D..
E Young's modulus
E.. . ,E_2 Young's moduli in the x,y directions
Ei(u) the exponential integral defined in eq. (B-18)
e base of the natural logarithms, e ~ 2.7183
F, damping force
F spring forceS
F exciting force amplitude
AF horizontal shear force per unit width
F . thickness-shear stiffnesses of the plate
F.. complex stiffness coefficients associated with F
|fI generalized-force column matrix
g loss tangent
g1 parameter of the Biot model
g, dimensionless geometric parameter defined in ref. 35
g. ,etc. subscripted loss tangents where the subscripts (i.e.refer to the associated stiffness; for example, g^iisignifies the loss tangent associated with thelongitudinal stretching stiffness
H factor - (h/m)
HPMF half-power magnification factor
H factor = H/u,n
vii
H ,H thickness fractions of layers a and b, respectively
h total thickness of the plate; parameter in eq. (H-2)
I integral form defined in Appendix G
i unit imaginary number =• /-I
K thickness shear factor
K factor defined in eq. (H-10)
K complex-flexibility factor defined in eq. (F-15)
K. . composite shear coefficient
k spring rate
k complex spring constant
k' stiffness coefficient associated with the total in-plane force
k11 C1 e m (C1 and m are constants)
ic Kelvin-Voigt complex stiffness defined in eq. (B-3)
L effective length of spring
L amplitude of Lagrangian energy difference
L complex-stiffness factor defined in eq. (F-16)c
-f.n natural logarithm
log logarithm with base 10
mass matrix
M stress couples, moment per unit width
MF,MF' magnification factors defined in eqs. (B-38) and (B-16)
m damping exponent defined in eq . (B-22)
m mass
tn,n cos 9, sin 0
m ,m. ,nu mass per unit of plate area, first moment of mass perunit area, second moment of mass per unit area
viii
N.. membrane stress resultants, force per unit width
n degree of heredity
Q quality factor ? reciprocal of the dimensionless bandwidth
Q. thickness-shear stress resultant
Q.. reduced stiffness coefficients transformed to platecoordinates (x,y); see eq. (A-16)
*Q. . reduced (plane-stress) stiffness coefficients with re-
spect to material symmetry axes (X,Y); defined in eq. (A-6)
q normal pressure acting on plate
R density ratio (;= p^/p(2))
RMF resonant magnification factor
§ complex flexibility defined in eq. (F-22)
fS] complex stiffness matrix
T kinetic energy; period of damped oscillation (Appendix Bonly)
T. kinetic energy per unit of plate area
[T ] transformation matrix defined in eq. (A-12)
t time
t|,t~ two different specific values of time
U strain energy
U. strain energy per unit of plate areaA
U, energy dissipated per cycle
U, damping energy per cycle and per unit of volumedv
U undetermined longitudinal-displacement parametersrun
U shear strain energys
U1 shear strain energy associated with equivalent uniform,longitudinal thickness-shear strain
U strain energy per unit of plate volume
ix
u,v,w displacements in the x,y,z directions
u ,v ,w displacements of middle surface in x,y,z directionso o o
u displacement amplitude of vibration
u1 trasient solution in eq. (B-70)
u static displacement; see Appendix 8o t
V volume
V undetermined transverse-displacement parameter
v spatial attenuation constant defined in eq. (B-33)8
v temporal decay constant defined in eq . (B-30)
W total work done
W undetermined normal-displacement parametermn
X,Y,Z coordinates of the material-symmetry axes
x,y,z rectangular coordinates in the longitudinal, transverse,and thickness directions
x. ,x? two different specific values of position
Z ,Z characteristic parameters tabulated in ref. 44m' n
z,,z thickness-direction coordinates of outer and inner faces*~l of the k-th layer
•j > column matrix
[ j square matrix
normalized arguments in the x,y directions
heredity constants in eq. (B-21)
C^/C^ in Appendix E only
loss angle defined in eq . (B-27)
spatial attenuation rate defined in eq. (B-34)s
v decay rate defined in eq. (B-31)
A comples factor defined in eq. (F-22)
o logarithmic decrement defined in eq. (B-28)
6 logarithmic attenuation defined in eq. (B-32)s
e Biot parameter in eq. (B-17)
e . . strain components with respect to x,y axes
eTT strain components with respect to X,Y axesL J
e strain corresponding to longitudinal thickness-shearXZ action (Section III and Appendix E)
longitudinal thickness-shear strain weighted accordingto eq. (55)
damping ratio
XZ to eq. (55)
9 angle of orientation of an individual layer
<t . . curvature changes
u parameter (* t / . i< )
v Poisson's ra t io
V12 ,v?1 major and minor in-plane Poisson's ratios
| generalized coordinate
\f \ column matrix representing generalized displacementsL mnJ
rt pi *-• 3.1415962
p density
V> summation symbol
6 stress amplitude
3.. stress components with respect to x,y axes
0 stress components with respect to X,Y axesi. J
T dummy time variable in eq . (B-19)
>!> assumed modal function
4>(t) hereditary kernel defined in eq . (K-21)
xi
V ,¥xmn ymn
x y
0
phase angle between response and exciting force
undetermined rotation parameters
angles of rotation in the xz and yz planes
dimensionless frequency (=
Q at half-power points
OJ
Superscripts:
(k)
Subscripts:
k
t,
m
n
R
circular frequency of vibration
natural frequency
angular frequencies defining the half-power pointsof the frequency spectrum
denotes a typical kth layer
denotes a damping quantity
denotes differentiation with respect to time
denotes that the quantity is an amplitude
refers to the middle surface of the plate
denote the respective imaginary and real parts ofa complex quantity
denotes partial differentiation with respect to thevariable following the comma, i.e. UQ x = ouo/5x
integers ; k = 1,2,... K
integers ; /. = 1,2,... L
integers ; m = 1,2,... M
integers ; n = 1,2,... N
denotes resonance
xii
SECTION I
INTRODUCTION
1.1 Introductory Remarks
The continuing demand for increased structural efficiency in many
advanced aerospace vehicles has resulted in development of laminated
structures made of advanced fiber-reinforced composite materials, such as
boron-epoxy, graphite-epoxy and boron-aluminum (reference 1). One of the
most common structural elements for such vehicles is the rectangular plate
or panel, for which numerous stable static, buckling, and free-vibrational
analyses have been performed (reference 2). These advanced vehicles must
maintain their structural integrity not only during high staticly applied
mechanical and thermal loadings, but also in a variety of dynamic environ-
ments. In order to predict the dynamic stresses to which a structure will
be subjected, it is necessary to perform a dynamic response analysis in-
cluding the effects of damping properties as well as the various stiffnesses.
An example of this type of requirement is found in the Space Shuttle now
under NASA preliminary development (reference 3).
A composite material is defined as two or more materials joined to-
gether to form a nonhomogeneous material, which is used in constructing
structures. Although such a material is nonhomogeneous on a micro scale, it
behaves tnacroscopically as if it were a homogeneous, anisotropic material.
An anisotropic material is one which exhibits different properties when
tested at different directional orientations within the body. For example,
a single layer of composite material containing unidirectionally oriented
fibers (hereafter referred to as a unidirectional composite) has consider-
ably greater stiffness and strength in the direction of the fibers than it
does in a direction transverse to the fibers (see figure 1). This aniso-
tropic aspect is one of several which makes structural analyses for composite-
material structures more complicated (reference 4) than those for ordinary
isotropic materials, such as aluminum alloys or many unfilled plastics.
A single layer of unidirectional composite has certain orthogonal
axes of material symmetry and thus is said to be orthotropic. and behaves
in considerably simpler fashion than a general anisotropic material. If
the material is thin it is called plane orthotropic. However, for purposes of
obtaining a more efficient design, it is often advantageous to place dif-
ferent layers or plies at different orientations. For the case of a thin
plate, this means that we must consider it as a plane anisotropic material.
This treatment is intermediate between the complicated general anisotropic
case and the much simpler plane orthotropic case.
A laminate consists of two or more layers integrally joined together.
It is said to he laminated symmetrically if all of the layers above and be-
low the mid plane of the laminate have the same dimensions, properties, and
(orientation)(if the layers are orthotropic); see figure 2. A laminate is
said to be balanced if all of the layers oriented at -1-9 are balanced by an
equal number of identical layers at an orientation of -9; see figure 3.
If a laminate is not symmetrically laminated, coupling occurs between in-
plane (either normal or shear) stress on one hand and either bending or
twisting deformation on the other hand. In such a case as a laminate
consisting of a metallic substrate and a few layers of overlaying filamentary
'composite material, considerable bending-stretching coupling can occur and
thus, it is necessary to consider not only the in-plane and bending stiff-
nesses but also the coupling stiffnesses which couple together the other
two effects (reference 4). Obviously, this is considerably more complicated
to analyze than a simple single layer.
Unfortunately, it appears that no one has yet succeeded in devising
'a lamination scheme that is both symmetrical and balanced. However, in the
•'special, yet practical, case of multiple identical layers oriented alter-
'nately at +9 and -9, as the number of layers is increased, the bending-
coupling effect diminishes (reference 5). For more than ten such layers,
the bending-stretching coupling may be neglected for most engineering pur-
poses and, thus, the laminate may be treated macroscopically as if it were
a single-layer plate.
It has long been recognized that, due to the relatively low shear
stiffnesses of composite materials in planes normal to the laminating plane,
the thickness-shear* deformations must be included in the analysis, even
when the plate is relatively thin (references 6-8), in order to achieve
reasonably good predictions of laminate flexural behavior. Although
several existing laminated plate theories include thickness-shear flexibility,
all of them require an ad hoc assumption of the required shear correction
factor. In this report, two different, relatively simple procedures are
fSometimes referred to as "transverse shear", especially in the case
of beams. The terminology used here follows that established by Yu for sand-
wich plates (reference 9). Here the term, transverse, is reserved for the
in-plane direction which is normal to the longitudinal direction.
3
presented to enable rational prediction of the appropriate composite shear
correction factor (K) . The frequencies calculated using these values for
K in shear-flexible laminated plate vibrational analysis give good agree-
ment with the exact three-dimensional elasticity solution, which is com-
putationally much more complicated.
The use of high-damping polymeric materials in the form of a thin
layer or tape has come into widespread use as a structural damper to reduce
the vibrational response of aircraft panels, especially in high-noise regions
such as in the vicinity of jet engines. When the polymeric material is
added on either one side or both sides, it is known as an unconstrained
damping layer; when the polymeric material is placed between two or more
layers, it is called a constrained damping layer (or layers). Appropriate
analyses and design procedures have been developed for including either type
of damping layer, assuming all layers (metal and polymer) are isotropic
(references 10-12). However, so far as known, no detailed solutions have
been published on vibration of laminated composite-material plates which in-
cluded material damping. Such an analysis is presented in this report and
the results are compared with experimental data reported recently by Clary
(reference 13).
1.2 A Brief Survey of Selected Vibrational
Analyses of Laminated Plates
Apparently the first vibrational analysis was carried out by Pister
(reference 14) for a thin plate arbitrarily laminated of isotropic layers.
In this case, the net effect of the bending-stretching coupling resulted in
a reduced flexural stiffness.
Stavsky (reference 15) formulated a coupled bending-stretching
dynamic theory for thin plates laminated of composite-material layers,
but he did not present any numerical results. Apparently the first pub-
lished results of the vibrational analysis of such plates is due to Ashton
and Waddoups (reference 16), who used the Rayleigh-Ritz method to analyze
rectangular plates. These results compared reasonably well with experi-
mental results for the completely free and cantilever cases. A similar
analytical and experimental study, but involving simply supported and free
boundary conditions, was carried out by Hikami (reference 17). Additional
analysis of the free-edge case was carried out by Ashton (reference 18).
For simply supported plates, Whitney and Leissa (references 19,20)
presented closed-form solutions for the natural frequencies in the case
of cross-ply and angle-ply lamination schemes. As would be expected, their
results showed a strong effect of bending-stretching coupling in lowering
the natural frequencies.
The case of clamped boundary conditions is more complicated analyti-
cally, but more representative of practical aerospace structures. Rayleigh-
Ritz and experimental investigations of such structures were carried out
independently by Ashton and Anderson (reference 21) and by Bert and May-
berry (reference 22).
The first more accurate vibrational analysis of laminated plates in-
cluding thickness-shear flexibility was made by Ambartsumyan; see reference
23. He assumed an arbitrary distribution of thickness-shear stresses through
the thickness. However, in carrying out his actual calculations, Ambart-
sumyan assumed a simple parabolic distribution. It can be shown by a
simple mechanics-of-materials analysis (Jourawski shear theory; see Section
5
Ill) that the thickness-shear stress distribution must be discontinuous
from layer to layer; thus, the simple parabolic distribution does not hold.
Ambartsumyan did not give any numerical results for vibration of laminated
plates; however, Whitney (reference 24) did so, using Ambartsumyan's basic
theory.
Using another approach, Yang et al (reference 25) entended the Mindlin
homogeneous, isotropic, dynamic plate analysis (reference 26) to the laminated
anisotropic case. They assumed a thickness-shear angle which is independent
of the thickness coordinate (z) and then integrated the stress equations of
motion to obtain the governing partial differential equations. After
integration, they introduced a thickness-shear coefficient in an ad hoc
fashion to correlate the predicted frequencies with known results.
Also Yang et al introduced the coupling inertial effect (present
only in the case of plates laminated unsymmetrically with respect to mass
distribution), as well as the familiar translational and rotatory inertia
effects present in homogeneous (or mass-symmetrically laminated) plates.
The inclusion of these higher-order inertial effects is consistent with the
inclusion of thickness-shear flexibility.
The analysis presented in this report is an improvement over both
the Ambartsumyan and Yang et al analyses, in that it presents simple rational
means for calculating the shear coefficient, rather than assuming it a priori.
An alternative to considering shear deformation per se is to make a
microlaminar analysis, such as considered by Biot (reference 27) and
Bolotin (reference 28). However, this approach has not been used very ex-
tensively so far.
Another approximate approach is to use the Voigt and Reuss models to
6
determine the properties of an equivalent homogeneous, anisotropic, shear-
flexible plate. This method was originated independently by Postma (refer-
ence 29), White and Angona (reference 30), and Rytov (reference 31) to
investigate wave propagation in a continuum consisting of alternating layers
of stiff and flexible isotropic materials. This concept was applied re-
cently to plates with experimental verification for the special case of a
beam, by Achenbach and Zerbe (reference 32). A new analysis, extending the
Postma approach to the more general case of a laminate consisting of alter-
nating orthotropic layers, is presented in Appendix F.
All of the analyses mentioned above are approximate formulations in
this sense: interlaminar compatibility is impossible unless both of the
in-plane Poisson's ratios are identical in all of the layers. The reason
for this is that, in a plate, one can have discontinuities in the strain
component in a given direction in the plane, due to the Poisson contraction
caused by a stress resultant or a stress couple acting in the perpendicular
direction in the plane. This deficiency can be removed by using the ap-
proach introduced recently by Hsu and Wang (reference 33) and Wang (refer-
ence 34) for laminated shells. Another technique is to apply the nonhomo-
geneous three-dimensional elasticity approach, such as used recently by
Srinivas et al (references 35-37) for a special case of simply supported
edges. Still another method is to use finite elements in the thickness
direction, as introduced recently by Tso et al (reference 38). Unfortunately,
all of the more accurate analyses mentioned in this paragraph are quite
complicated computationally and thus are not amendable to engineering
analyses of practical structural elements. Furthermore, the work of refer-
ence 37 showed that for structurally reasonable values of the following
modal parameter, the Mindlin-type theory (such as extended here) is
sufficiently accurate for determination of natural frequencies, but not for
determination of the associated stress distribution.
There are numerous analyses in the literature on vibration of damped
plates with isotropic layers; also there are a few vibrational analyses
of single-layer, anisotropic plates and a few quasi-static (creep) analyses,
of laminated, anisotropic plates. However, vibrational analyses of laminated,
anisotropic plates are quite limited. Dong (reference 39) indicated the
solution for the dynamic response of a simply-supported rectangular plate
arbitrarily laminated of orthotropic, viscoelastic plies modeled as a
standard linear solid.
SECTION II
FORMULATION OF THE THEORY OF LAMINATED, SHEAR-FLEXIBLE PLATES
In this section is presented a theoretical analysis of sinusoidally
forced vibration of laminated, anisotropic plates including bending-
stretching coupling, thickness-shear, all three types of inertia effects,
and material damping. First the assumptions, on which the analysis is
based, are stated explicitly. The general analysis is applicable to plates
with any combination of natural boundary conditions at their edges. The--;
analysis begins with the anisotropic stress-strain relations for a single
layer and proceeds through the stiffness and damping constitutive relations,
formulation of the various types of energy and work terms, and culminates
in the formulation of an eigenvalue problem by application of the extended
Rayleigh-Ritz method.
2.1 Hypotheses
The following assumptions are made in the analysis presented here:
HI. All displacements are assumed to be sufficiently small so that
the linear strain-displacement relations are sufficiently accurate.
H2. The layers which make up the plate are linearly elastic and
may be isotropic or orthotropic with any arbitrary orientation in the
plane of the plate.
H3. The layers are sufficiently thin that thickness-normal-stress
effects may be neglected, i.e. the layers are assumed to have finite
stiffnesses which resist membrane, bending, and thickness shearing
stresses.
H4. The layers are assumed to be bonded together perfectly.
H5. The plate is assumed to have all components of translational,
translatiohal-rotatory coupling, and rotatory inertia.
H6. All material damping effects are assumed to be small. They
are incorporated by using stiffnesses which are complex rather than real
(see Appendix B); the complex-stiffness array is assumed to be symmetric
(see Appendix I). All other thermal effects are neglected.
H7. All initial-stress effects are neglected.
H8. All interactions with a surrounding fluid can be either
neglected or considered to be included in the values used for the material-
damping coefficients.
H9. The excitation consists of a uniformly distributed normal
pressure loading, sinusoidal with respect to time.
2.2 Kinematics
The displacement field is assumed to be (hypothesis H3) :
u (x,y,z,t) = u (x,y,t) + zy (x,y,t)
v (x,y,z,t) » VQ (x,y,t) + z\t (x,y,t) (1)
w (x,y,z,t) = WQ (x.y.t)
where u,v,w are the displacement components in the x,y,z directions (see
figure 4); u ,v ,w are the displacement components at the middle surface
10
of the multi-layer plate; ijj and i|t are the weighted middle-surface rotationsx y
in the respective xz and yz planes; and t is time.
Within the framework of hypothesis HI, the total engineering strains
are given by the following in-plane strain-displacement relations:
(no sum)
where
e=u ; e = v ; e = v + u (3)xx o,x *yy o,y xy o,x o,y
H = i|i ; x = ii/ ; K ' = I | J + \ ! J (4)xx x,x yy y»y xy y,x x,y
Also the following thickness-shear strain-displacement relations
hold:
e = w + \ | i ; e = w + i t / .(5)xz o,x *x yz o,y Ty
where a subscript comma denotes partial differentiation with respect to
the variable following the comma, i.e. u ? ^u /£x.
2.3 Stiffness Constitutive Relations
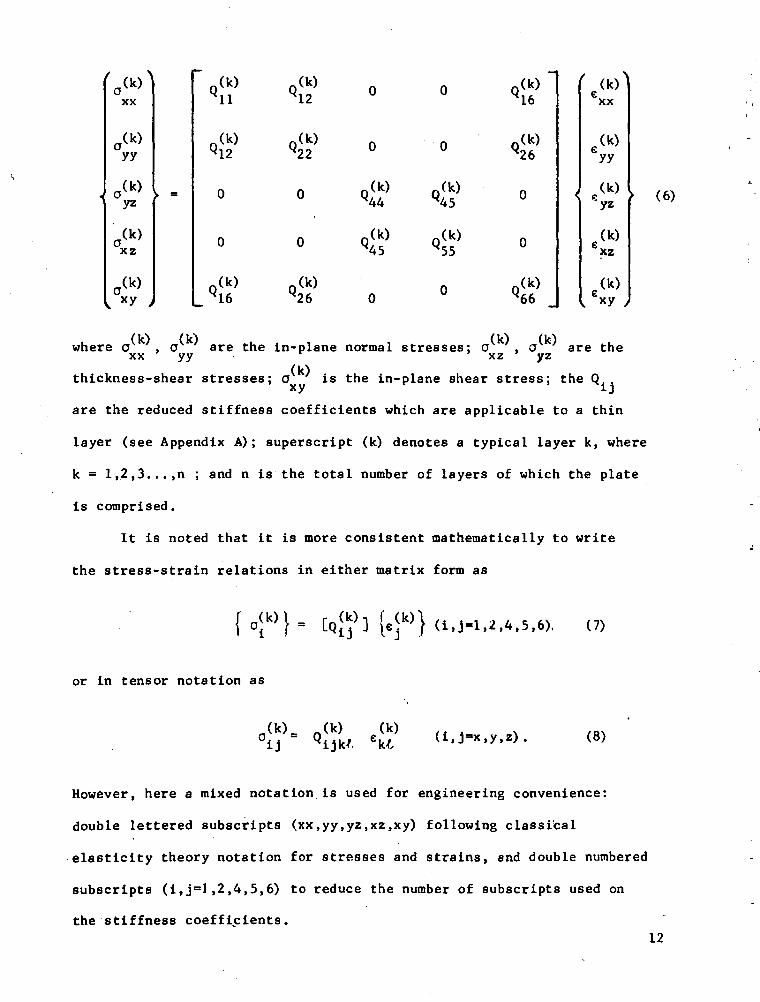
In line with hypothesis H2, the following stress-strain relations
are assumed to hold for each individual layer of which the plate is com-
prised:
11
'°lk)1
yy
a(k>yz
xz
a(k>I, *y J
> =
"<« Q« o o „<»-
o y o o oL£ £ £ 4_ O
0 0 Q.(k) Q.(k) 044 45
0 0 Q<k> Q<k> 0
Q«0 (k) (k)_^16 W26 0 U 66 _
<
, \
exx}
e(k)
yy
eyz
exz
e(k)
l e x y J
(6)
(k") (k") (k) (k)where O , a are the in-plane normal stresses; a , a ' are thexx yy xz yz
(k)thickness-shear stresses; O is the in-plane shear stress; the Q
are the reduced stiffness coefficients which are applicable to a thin
layer (see Appendix A); superscript (k) denotes a typical layer k, where
k = l,2,3...,n ; and n is the total number of layers of which the plate
is comprised.
It is noted that it is more consistent mathematically to write
the stress-strain relations in either matrix form as
(7)
or in tensor notation as
(k) (k)(i,j=x,y,z) . (8)
However, here a mixed notation is used for engineering convenience:
double lettered subscripts (xx,yy,yz,xz,xy) following classical
elasticity theory notation for stresses and strains, and double numbered
subscripts (i,j=l,2,4,5,6) to reduce the number of subscripts used on
the stiffness coefficients.12
As is conventional in plate and shell theory, it is convenient to
introduce generalized forces which are applicable to the whole laminate,
rather than only a specific distance from the plate middle surface.
(k)The stress components, o. . , are functions of x,y,z; therefore, integrat-
ing them through the thickness yields the following generalized forces,
which are functions of x,y only:
h/2,_,N ,N ,Q ,Q| B f {a(k),o(k),o(k),o(k),o(k)) dz
xx' yy' xy'xx'xyJ .) ,_ I xx ' yy ' xy ' xz ' yz J
= 7 J {a(k),o(k),a(k>a(k),a(k)ldz (9)L J I xx yy xy' xz yz fk=l Zk-l
{M ,M ,M ], [{o(k), a(k),a(k)}zdzI xx yy xyJ J h/9 xx ^ x^
I xx yy xyk=l k-1
where h =? total plate thickness, the quantity (zk~z. ,) is the thickness
of an individual layer (see figure 5), N.. ^ membrane stress resultants
(force per unit length), Q. ^ thickness-shear stress resultants (force
per unit length), and M.. are the stress couples (moment per unit length)
Inserting the stress-strain relations, given by equations (6) in-
to equations (9) and (10), one obtains the following constitutive re-
lations for the composite:
13
x \NXX
Nyy
Nxy
MXX
MyyMxy
V> ,
( _
" All A12 A16 I Bll B12 B16' ° °l i
A12 A22 A26 i B12 B22 B26 j ° °
A16 A26 A66 : B16 B26 B66 j ° °
11 12 16 ' 11 12 16 1I
IB12 B22 B26 j °12 °22 D26 j ° °
I
B16 B26 B66 _] °16 °26 °66 i ° °_ _ _.
0 0 0 ' 0 0 0 ,F.. F . _. " 44 45
o o o i o o o (F45 F55
/ NO
0eyy0
_€_xy
KXX
Kyy
Kxy
eyz
k e
xz
(11)
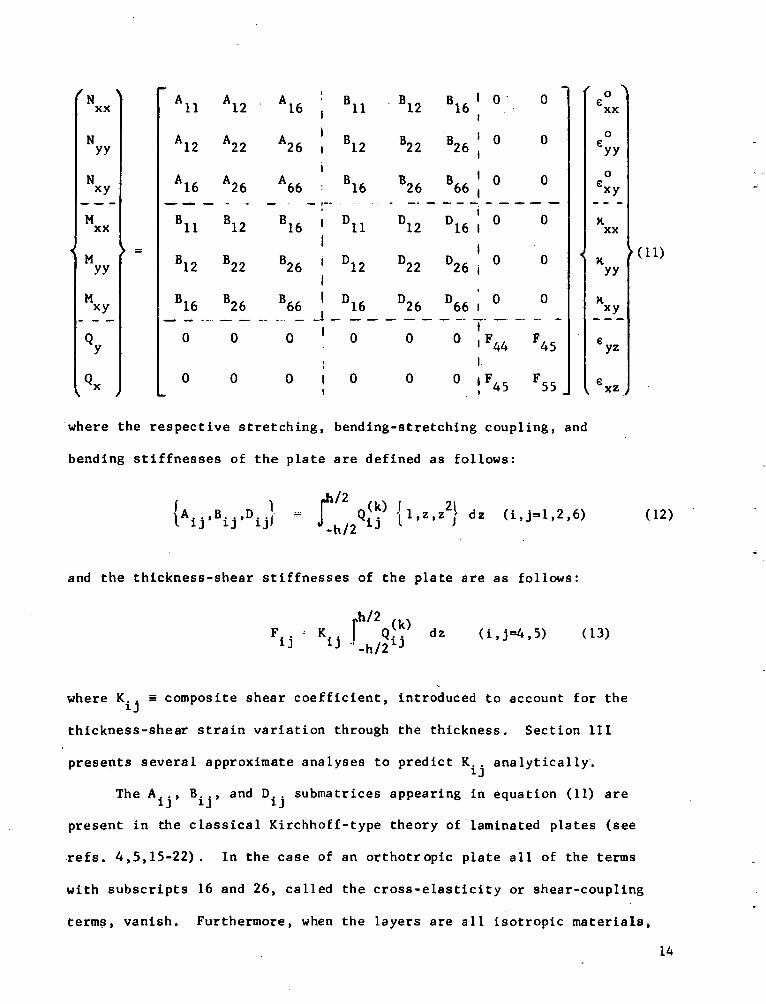
where the respective stretching, bending-stretching coupling, and
bending stiffnesses of the plate are defined as follows:
12(
h/2dz (12)
and the thickness-shear stiffnesses of the plate are as follows:
rh/2 (MFij * Kij J. ,?i1 dz <l»^»5> (13)
where K.. = composite shear coefficient, introduced to account for the
thickness-shear strain variation through the thickness. Section III
presents several approximate analyses to predict K.. analytically.
The A.., B.., and D. . submatrices appearing in equation (11) are
present in the classical Kirchhoff-type theory of laminated plates (see
refs. 4,5,15-22). In the case of an orthotropic plate all of the terms
with subscripts 16 and 26, called the cross-elasticity or shear-coupling
terms, vanish. Furthermore, when the layers are all isotropic materials,
14
only two of each set of the terms with subscripts 11,12,22, and 66 are
independent.
If the plate is either homogeneous (i.e. single layer) or laminated
symmetrically about the plate middle surface, the bend ing-stretching cou-
pling stiffness submatrix B. . vanishes. Then the only remaining terms are
the A., and 0.. submatrices, which are present in classical, homogeneous
thin-plate theory.
The thickness-shear stiffness coefficients F. . account for the pre-
sence of thickness-shear strains, in a manner which can be considered to
be B generalization of that used by Mindlin (ref. 26) for homogeneous,
isotropic plates. To reduce the present theory to the classical Kirchhoff-
type plate theory, the thickness-shear strains would be omitted; thus,
from equations (5), one would obtain:
*x = ' Wo,x ; *y = - Wo,y
Furthermore, one would delete the thickness-shear strains, e and e ,
from equations (11) and the thickness-shear stress resultants, Q and Q ,x y
would be computed from equilibrium considerations only.
2.4 Strain Energy
The differential of the strain-energy density (strain energy per
unit volume) is given by:
«= o(k) de(k) + 0(k) de(k) + a(k) de
(k)
v xx xx yy yy xy xy
15
Integration of equation (15) yields:
U<k)=(l/2) [u(k) e(k) + o(k) e
(k) + o(k) e(k>v xx xx yy yy xy xy
. (k) (k) (k) (k) .°yz eyz xz exz ] (16)
The strain energy per unit of plate area (U ) is the integral ofA
GOU over the total thickness of the plate:v
h/2 n ZkU = [ U ( k > d z = 7 f U ( k ) dz (17)
A J -h /2 V /•. J«. . Vk=l k-1
Substituting equations (16) , (6), and (2) into equation (17) , per-
forming the integration, and using equations (12) and (13), one obtains
the following expression for the strain energy per unit area:
(1/2)
26 xy 66 « 112A « + A <* + 2B
+ 2 B10(e° K + e° H ) + 2 B_, e° K12 xx yy yy xx 22 yy yy
+ 2 B, , (e° H + e° K ) + 2B0 ,( e° K + e° K )16 xx xy xy xx' 26 yy xy fcxy yy
ty f*
+ 2 B,, e H + D * + 2 D K K + D00 K66 xy xy 11 xx 12 xx yy 22 yy
2 2+ 2 D16 \x Kxy + 2 °26 Kyy \y + °66 Hyy + F44 eyz
+ 2 F45 eyz exz + F55 exz 3
16
2.5 Damping Coefficients and Dissipative Energy
For a material with Ktmball-Lovell structural damping (see Appendix
B), the stress-strain rate relation for sinusoidal motion at a circular
frequency uu can be expressed as follows:
o = (b/iu) e (19)
where b is a material constant and e is the strain rate.
The strain is given by
1 f H4.
(20)
where i = ./-I.
Thus,
e = iue (21)
Substituting equation (21) into equation (19), one obtains:
d = Qe (22)
where
Q = ib (23)
Generalizing equation (23) to the entire array of stresses and
strains in layer "k", in contracted notation analogous to equation (7), we
* (k)obtain the following expression, where Q is symmetric (hypothesis H6) :
17
Equation (24) is the same as equation (7), except that here the
presence of the hat symbols (*) denotes damping quantities rather
than elastic quantities.
The energy dissipated per unit of plate area, due to damping,
is denoted by the symbol D.. The expression for it in terms of theA
midplane strains (e..) and the curvatures (H .) is the same as
equation (18), except for the presence of the hat symbols over all
of the A , B.., Dj.» and F.. quantities, where
(25).<*">,,
where gi> are loss tangents (see Appendix B).
2.6 Kinetic Energy
The differential kinetic energy of an elemental volume (dx by dy
by dz) is given by:
(p(k)/2) (u2 + v2 + w2) dx dy dz
(k)where p is the density at the point (x,y,z) and u,v,w are the velocity
components in the x,y,z directions respectively.
Now the kinetic energy per unit of plate area is obtained from the
differential quantity given above by dividing by dx dy and integrating
over the entire thickness of the plate, as follows:
18
(p(k)/2Xu2 + v2 + w2)TA • (P V2Xu + v + w ) dz (26)A J-h/2
Substituting the kinematic relations, equations (1), into equation
(26) and performing the integration, assuming that the density is uni-
form through the thickness of each individual layer, one arrives at the
following expression:
T. = (m /2)(u2 + v2 + w2) + m. (u ty + v ijf )A o o o o 1 o x o T y
+ (m 12) (\2 + ft (27)£• x y
where m ,m , and m are respectively the mass per unit of plate area,
first moment of mass per unit area (coupling inertia), and second
moment of mass per unit area (mass moment of inertia) , defined as
follows :
2k
k=l zk-l
dz <28)
Only the coefficient m appears in classical Kirchhoff theory for
the dynamics of thin, homogeneous plates. The Mindlin dynamic plate
theory of homogeneous plates (ref. 26) contains both m and m_ , while the
dynamic theory originated by Yang et al (ref. 25) for laminated plates
contains m , m, , and m. .o 1 i.
2.7 Work Done by External Forces
19
The only external force considered here is a uniformly distributed
normal pressure which has a sinusoidal wave form in time. Thus, it can
be written in complex variable notation as follows:
q(x,y,t) = q eilljt (29)
where q ~ amplitude of the normal pressure.
The following expression for the total work done may be derived
easily from the principle of virtual work:
W = I I q (x,y,t) w (x,y) dx dy (30)o o
2.8 Application of the Extended Rayleigh-Ritz Method
Since the present problem is one of steady-state harmonic ex-
citation denoted in complex-variable exponential forms, the displacements
and rotations are proportional to e also. It is noted that the phase
angle between the response and the excitation is taken care of by the
imaginary components of these quantities. Thus, the time dependence
cancels out in all of the energy terms which appear in Lagrange's equation.
Therefore, it is necessary to consider only the amplitudes of the re-
spective energy and work terms. Then, as shown in detail in Appendix
C, the amplitude of the Lagrangian energy difference can be expressed
as follows:
L~ = (T + W) - (U + D) (31)
20
where D.f.U.W are the amplitudes of the dissipative, kinetic, and strain
energies and of the work done by the external forces, respectively.
The strain and damping energy terms can be combined by introducing
complex stif fnessses , as discussed in Appendix B. Making this sub-
stitution and integrating over the plate area, we obtain the following:
a b
\ I I {A-, u2 + 2A.-1i v + A,0v2 + 2(A,,:U +A_,v ) (v +u )JQ J I 11 uo,x 12uo,x o,y 22 o,y x 16 0,x 26 o,/ v o,x o,y
•^^(v +" )2 + 2B. .U .ty + 2B,,(u' ^ +v ^ )+2B0 'v 'if66 o,x o,y 11 O , X T X , X 12 o ,x T y ,y o ,y r x ,x 22 o .y^y.y
+2B1,[ui (^ +$ )+(v +u )"$ 1 + 2B0,[v ("$ -Hj )16L o ,x v y y ,x vx,y v o,x o,y Yx,x 26 o,y y,x Y x,y
+ (v -hi )f ] + 2B,,('v +u )(^ +7 ) + 6 '\[(2
o,x o , y / Y y , y J 66V o,x o , y / v y y , x *x,y H Y x , x
,,16yx,x y,x ''x.y'
7
dx dy (32)
where the superscript ('-) denotes that the quantity is an amplitude, and
V(33)
The sum of the amplitudes of the kinetic energy and the work done
by external forces can be expressed as follows:
21
,b
\> x"o ' "o ' "o' ' -1"r."o1'xT-W = (oj2/2) f f [m (u2 + v2 + w2) + 2m, (u f +
J J u Y
o o
~2 ~2 fa fk ~ ~+ nu (i|f + i|» )] dx dy +1 q \* dx dy (34)"2 vvx T V
o o
To apply the extended Rayleigh-Ritz method, the assumed functions
for the amplitudes of the displacements and rotations are given the
following general form:
M N
, u $ (o/)fo /_. l-i mn urn unm=l n=l
M N
v / ) V $ (o)*L L, mn vmo , mn vm vn
tn=l n=l
wo
ft f) > w,/ W $ (a)* (B) (35)
c- mn wm wnm=l n=l
M N,
/ } Y *. (a) $ (B)
m=l n=l
M N
y / « *. (cy)$, (B)/_. c.; xmn \jixm •'"—m=l n=l
The modal coefficients U ,V ,W ,Y ,y are the undeterminedmn mn mn ymn xrnn
parameters, the $'s are assumed modal functions, a ~ x/a, p :- y/b.
Substituting equations (32), (34), and (35) into equation (31)
for the Lagrangian energy-difference amplitude (L), one obtains the
result presented in Appendix Dl.
Hamilton's principle can be stated mathematically as follows:
22
6 | L dt = 0 (36)"t.
To achieve as close of an approximation as possible to equation
(36), the Lagrangian function L is minimized by setting its partial
derivatives with respect to the modal coefficients respectively equal
to zero, i.e.
(37)
=0 ; k = 1,2,..., M ; f = 1,2,..., N
Equations (37) represent a set of M x N nonhomogeneous, linear algebraic
equations.
2.9 Reduction to Matrix Form
For computational convenience, it is desirable to express the set
of equations (37) in matrix form as follows:
5 J - "2[M] (O = M (38)
where [S] --• complex stiffness matrix, [M] ~ mass matrix, and '.£ | and
| f I are column matrices representing the generalized -displacements and
generalized forces, respectively, i.e.
23

mn
Vmn
Wmn
'ymn
xmn
0
0
'q
o
o
(39)
Equation (38) can be written in explicit complex form as follows:
mn mn ran (40)
where superscripts (R) and (I) denote the real and imaginary parts of
the complex quanti t ies appearing in equation (38).
Equation (40) can be solved for the response matrix, partitioned
into real and imaginary parts, as follows:
-s(I)
s(R>- «,VR>
-1f(R)l
(41)
The modal coefficients are placed in the inverse matrix in equation
(41). For the specific numerical case treated M=N=2, i.e. m,n=l,2. Thus,
the complete matrix is of order 40 x 40 with each submatrix being of
order 2 x 2 . Thus, the problem has been reduced to a standard algebraic
eigenvalue problem which can be solved by an available computer suboutline
for the IBM 360 Series bQ digital computer. Complete computer program
documentation is presented in Appendix J.
24
SECTION III
DERIVATION OF THICKNESS-SHEAR FACTORS FOR LAMINATES
In this section are presented two entirely different approaches
for calculating the thickness-shear factors for a laminate. The first
approach is to extend the Jourawski static theory of shear-flexible
beams (reference 40), as presented in elementary mechanics-of-materials
textbooks, to a laminated beam. The other approach is to extend, to
the laminate case, Mind 1in's method (ref. 26) of matching the pure
thickness-shear-mode frequencies predicted by two-dimensional dynamic
elasticity and by Timoshenko one-dimensional, shear-flexible beam theory
(references 41, 42).
In the case of isotropic plates, there is only one independent
thickness-shear factor (K) , since K 5=0 and K «K^=K. The static
approach mentioned above yields a value of K = 0.833 (reference 43),
while Mindlin's dynamic approach results in a value of 0.822 for K.
Srinivas et al. (ref. 35) showed that use of either of these values for
K in Mindlin's plate theory results in a very close approximation to
the lower natural frequencies computed by exact, dynamic, three-dimensional
theory of elasticity for rather thick, homogeneous isotropic rectangular
plates simply supported on all edges.
In the case of orthotropic plates, there are two independent thick-
ness-shear factors (K,, and K,.,.) , since K, ,.=0 and K_,^K,,. In the case
of a plane anisotropic plate, such as one consisting of a unidirectional
25
composite material with its major material-symmetry axis oriented at an
acute angle (0) with its edges, there are three independent, non-zero
K... However, for this case, Appendix A presents transformations from
which the three F.., proportional to K. . and defined in equation (13),
can be calculated from the following data: F and F for the orthotropic
case (0=0 ) and the value of 0 in the anisotropic case. Thus, the general
problem of determining K . is reduced to one of calculating K, , and K,.,.
for the orthotropic case.
To calculate KSE. for an orthotropic laminate by either of the two
approaches mentioned above, one considers a beam oriented in the x
(k)* (k)direction and laminated of layers having properties E.. . and C_5 . To
calculate K44, x - y, E- E , and
To provide a check for the results, the fundamental eigenvalues
for free vibration calculated by laminated, shear-flexible plate theory
(Section II), using these values of K. ., are compared with the exact
laminated elasticity theory values given by Srinivas et al. (ref. 35).
3.1 Static Approach
To calculate the horizontal shear force per unit width, AF, acting
on a cross section, figures 6 and 7 are used. For consistency plate notation
is used, even though the theory is only one dimensional.
The bending stress in typical layer "k", at a distance z from the
midplane of the laminate, is calculated as follows:
(k) = E(k)K z (42)
XX 11 XX
* (k) (k)For thin plates as treated in this report, E|. -• Q),, where
(k)_ E<k), Q _v(k) <kKll = Ell ' (1 V12 V21 )m 26
(k)where * = longitudinal bending curvature and E.1 = longitudinal Young's
XX i. 1.
modulus of layer "k".
The longitudinal stress couple (bending moment per unit width) is
defined as follows:
V fzk mMxx = L\ °xxzdz
k=1
The longitudinal curvature can be expressed in terms of M asXX
follows:
K = M /Dnl (44)XX XX 11
where D.j ^ longitudinal flexural rigidity.
From equations (42) and (44) , the bending stresses acting on the
left (x=x ) and right (x = x^Ax) sides of the elements are:
Z/Dll)Mxx 5
(45)
Since both of these bending stress distributions act on identical
cross-sectional areas, the horizontal shear force per unit width, which
acts on the element, is given by:
AF = [o (x.+Ax)-0 (x.)] dA (46)JA xx i xx i
where A --- area shown in figure 3 .o
27
Combining equations (45) and (46), one obtains:
AF = (AM /D )Y(z) (47)XX JL J.
where
Y(z) = E(k)z dA= f EJA
The force per unit width, AF, must equilibrate the horizontal
(k)shear stress, a , acting on the bottom face of the element shown in
figure 7. Thus, we have:
AF = a(k) Ax (48)xz
Hooke's law in shear for layer "k" is
a(k) - Ce (49)xz 55 xz
( k) ( k)where C and e are the modulus and strain corresponding to longi-55 xz
tudinal thickness-shear action in layer "k".
Substituting equation (49) into equation (48) , one obtains the
following result:
AF = C 'e 'Ax (50)
The following expression for the longitudinal shear strain at
a distance z is obtained by equating the right-hand sides of equation
(47) and (50) :
28
exz>(x'z)
where Q is the thickness-shear stress resultant (force per unit width),A
which is related to M by static equilibrium as follows:A A
Qx - AMxxMx (52)
The shear strain energy for a laminated, rectangular-cross-section
beam, shown in figure 9, is:
Jc-Le-TdA (53)
The shear strain energy associated with an equivalent uniform,
longitudinal thickness-shear strain in a laminated, rectangular-cross-
section beam of cross-sectional area A is:
where K is the longitudinal thickness-shear factor and e' is weightedJj X Z
according to:
n k n
xz U J xz xz
Vi k'1 zk-i
Equating the right-hand sides of equations (53) and (54) yields an
equation; then substituting equations (49) and (51) into that equation,
one arrives at the following explicit expression for the longitudinal
29
thickness-shear factor
J Y(z) dz]1
k=1 z
k=l Zk-l k=l Zk-l
Equation (56) is a general expression for the static, longitudinal
thickness-shear factor for an arbitrarily laminated beam. It is a
relatively simple algebraic expression which depends upon only the
longitudinal Young's and thickness-shear moduli of the individual layers
(k) (k)(E / and C^ ) and the lamination geometry. Numerical results are
presented in later examples.
3.2 Dynamic Approach
Due to the inherent mathematical form of the equations of dynamic
elasticity theory for a multi-material (multi-layer) medium, it is not
feasible to present a general solution for the thickness-shear factor
obtained by using the dynamic approach. Even in the case of a specific
class of laminate, such as the three-layer, symmetrically laminated one,
it is not possible to obtain an explicit expression for the thickness-
shear factor. In fact, the complexity of the dynamic case, which in-
volves the dynamic elasticity-theory analysis of a shear-flexible
laminated beam, approaches that of the shear-flexible laminated plate and
thus negates much of the advantage of using the thickness-shear factor
30
approach to laminated, shear-flexible plate dynamics. However, in order
to illustrate the dynamic approach and to provide a numerical comparison
with the static approach and with the exact results of Srinivas et al
(ref. 35), an analysis for the symmetrical three-layer case is presented
in Appendix E.
31
SECTION IV
MODAL FUNCTIONS USED FOR VARIOUS
PLATE BOUNDARY CONDITIONS
In applying the extended Rayleigh-Ritz method, the approximate
modal shapes assumed must satisfy the kinematic boundary conditions.
However, to improve convergence, it is desirable to satisfy the force-
type boundary conditions also. For a rectangular plate, the three cases
of boundary conditions most commonly encountered in practice are discussed
in Sections 4.1-4.3.
It should be noted tha C , C , Z , Z are characteristic parametersm n m n
tabulated in reference 44. Also, five boundary conditions per edge need
to be prescribed rather than four as in classical theory.
4.1 Simply Supported on All Edges
The boundary conditions considered here are simply-supported edges
in the sense that
N = M = v = w = i l i = 0 a t x = 0 , a (o/=0,l)XX XX O O y
<5 7>N = M = u = w = \ j i = 0 a t y = 0 , b (0=0,1)
yy yy O O YX J » v H i /
As was pointed out by Wang (reference 45), it is impossible for a
separable-form deflection function to satisfy the above boundary conditions
for the case of a plate of anisotropic material (Q., and Q~, ^ 0). However,lo £o
the following modal functions permit eqs. (35) to satisfy eq. (57) exactly
32
in the orthotropic case, but only approximately in the anisotropic case:
(58)
= $ = cos mrrrY ; $ = $ = $. = sin timo/urn \Jixm vm \fln \|iym
$ = $ = cos nrr8 ; f = $ = $. = sin nrrBvn tyyn K un wn \)/xn H
For the simply supported case, we substitute equations (58) into
equations (D-l through D-6). The evaluations of the integral forms are
presented in Appendix G.
4.2 Fully Clamped on All Edges
The boundary conditions for a fully clamped laminated plate are as
follows:
u =v =0 a t x = 0 , a and y = 0,b
w = w = i l i = 0 a t x = 0,a (59)o o,x Ty
w = w = T i = O a t y = 0,bo o,y Yx J
The assumed modal functions selected to permit equations (35) to
satisfy equations (59) are as follows:
= 4 > = $ = 4 = s i n 2mrro;um vm \jixm ~i|iytn
$ = $ = $ = $ , = s i n 2nTr8un vn tyxn \)iyn
}> = cosh Z a - cos Z a - C (sinh Z o - sin Z a)wm m*^ m m m m
$ = cosh Z P - cos Z 0 - C (sinh Z p - sin Z p)wn n n n n n
(60)
33
For the fully clamped case, we substitute equations (60) into
equations (Dl through D6). The evaluations of the integral forms are
presented in Appendix G.
4.3 Free on All Edges
The boundary conditions appropriate for a laminated plate free on
all edges can be expressed mathematically as follows:
N =M =0 a t x = 0,a and y = 0,bxy xy
N = Q = M = 0 at x = 0,a (61)XX X XX
N = Q = M =0 at y = 0,byy y yy
The assumed modal functions selected to permit equations (35) to
satisfy equations (61) are as follows:
fc = $ = $, = $, =1- cos 2mmurn vm \jixm \|iym
= $ = 4 > , = $ =1- cos 2nna (62)un vn tyxn \jiyn
$ = cos mno ; $ = cos nrrSwm wn
For the free edge case, we substitute equations (62) into equations
(Dl through D6). The evaluation of the resulting integral forms are
presented in Appendix G.
34
SECTION V
NUMERICAL RESULTS AND COMPARISON WITH
RESULTS OF OTHER INVESTIGATORS
In this section a comparison is made between the numerical results ob-
tained in this investigation and those obtained by other investigators.
5.1 Thickness-Shear Factors for Laminates
Two example problems are analyzed and, where possible, results of
Example 1 are compared with solutions obtained from other sources. The
results of Example 2 are presented for use in design.
Example 1: Three-layer, symmetric. isotropic_laminate. - The coordinate
system is shown in figure 10. All geometrical and material property ratios
correspond to the data of ref. 35 given as follows:
z-/z, = h /fh +2h 1 = 0.8 , E,, /E,, — 15,2 1 1 1 1 1
p(2)=l , and v(1) = v(2) = 0.3
Assuming only the x-direction is considered in the static and dynamic
approaches which were developed in Section III,then the following results
are obtained: (I) static case - the result obtained from equation (56)
can be expressed as K,.c=0.651, (II) dynamic case - the result obtained by
equating eqs. (E-13) and (E-27) is K55=0.350.
35
When the three-layer, laminate thickness parameter is chosen to be
Z2^zl =1» C^e analysis given in Section III can be reduced to a single-
layer homogeneous, isotropic material. Thus, using the data E /E^ -
C55)/C55) = P ( 1 ) /P ( 2 ) = = 1 and v(1) = v (2) = 0.3, the static case gives
K,-c = 0.833 and dynamic case results in K ,. = 0.822. These results are
identical with the values of the static and the dynamic shear factors
obtained for single-layer plates by previous investigators (refs. 43 and
16).
Example 2: Mult ip le alternating layers of two materials. - The
geometrical and material property ratios are given as
' C55>/C55)
The laminates vary from two layers to nine layers. Since the static
case is a relatively simple algebraic expression which considers only
longitudinal Young's and thickness-shear moduli of the individual layers
(k) (k)(E^ and w,. )and the laminate geometry, for design purposes, eq. (56)
will be used. The results are shown in table 1 and figure 11.
5.2 Plate Simply Supported on All Edges
Here we consider only free vibration of plates made of composite
material having material-symmetry axes coinciding with the geometric
coordinates (plate edges) as shown in figure 12 . Neglecting energy
dissipation, the time integral of the difference between the potential and
kinetic energies attains a stationary value. The displacement and rotations
36
are proportional to e . The time dependence in the strain and kinetic
energies cancel each other, i.e. only the amplitudes of the strain energy
and kinetic energy need be considered. Thus, we use only the real part
of homogeneous eqs. (D1-D6) with proper boundary conditions, see eq.
(57) , to apply Example 3.
Example 3: Three-layer, symmetric . isotropic plate. - The elastic
coefficients are those of isotropic material:
, Q<k>
- Q<k) = Q<» - E<»/ [2[l+v<k>] } , Q<k>=0
Geometrical and material property ratios correspond to the data
of ref. 35, given as follows
z2izl = n - / L n - +Zh - J» 0.8, EjJ'/E^'- C^/C^-15,
=0.3
and the following dimensionless geometric parameter defined in ref. 35:
2 (k) 2 (k) 2 U r0-0002"2 for k=1
k l . ^ J 0.0128iT2 for k=2
When the thickness of three-ply laminates is chosen to be z2/Ei = 1»
it can be reduced to a single-layer material as a special case. Then the
material properties are as follows:
37

E < } > / E< 2 > = C < i > / C < ? = p < l > / p < 2 > = 1 ; v(1) = V(2) - 0.311 11 55 55
82
A FORTRAN IV program is employed to compute the lowest eigenvalues
of plates with simply supported edges. The two cases considered are:
(1) single-layer homogeneous, isotropic, and (2) three-ply symmetrical
construction. The results are shown as a solid line in figures 13 and
14. The static and dynamic shear factors calculated in examples 1 and
2 are also shown for comparison.
The static Jourawski shear theory and dynamic Timoskenko type
theory appear to give good results for K as evaluated by inserting in
laminated, shear flexible plate theory and comparing the lowest eigen-
values with those given in refs. 35 and 14.
5.3 Plate Free on All Edges
The problem considered here is forced vibration of a rectangular
plate made of an arbitrary number of composite-material layers each
having its major material-symmetry axis oriented at an arbitrary angle
with geometrical coordinates as shown in figure A-2.
Since the present problem is one of steady-state harmonic excitation
including material damping effects, the complete set of eqs. (D1-D6) with
proper boundary conditions, eqs. (61), must be used.
38
Example 4: Boron/epoxy plate with twenty-four parallel plies
oriented at an arbitrary angle. - The input-data material properties are
Young's and shear moduli (E.,, E00 , C. . , Ccc, C,,), major Poisson's ratio11 t-i- HH 33 DO
(v,2) , bending and twisting- stiffnesses (D,,, D2~, D.™. D,c), and their
corresponding loss tangents, as generated in ref. 46 from constituent-
material experimental properties. It is noticed that all of the above input
data are functions of frequency. Geometrical and material properties
correspond to the data of ref. 13, as follows:
length, a = 18.19 in ; width, b = 2.75 in.
o /thickness, h = 0.034 in. ; density, p = 0.000194 Ib-sec /in
angle of orientation, 9 = 0°, 10°, 30°, 45°, 60°, 90°
A FORTRAN IV program is employed to compute the eigenvectors of
a plate with all edges free. To obtain the resonant frequencies of the
first five modes, two different resonance criteria are applied. In the
peak-amplitude method, the system is excited harmonically and the amplitude
at a particular point (a = 0, (3 = 1) is measured over a range of fre-
quency. The amplitude of the response depends not only on the dynamic
characteristics of the system, but also on the amplitude of the force
applied to it. For a linear system the peak amplitude is taken as
maximum displacement per unit amplitude of force. Throughout this re-
port, this ratio is referred to as the response. A typical result of
response with varying frequency is shown in figure 15 for an angle of
orientation, 9 = 10 . The complete results are as tabulated in Table II.
In the modified Kennedy-Pancu method, the modal shapes, phase
relations between motions at various points, and coupling between the
39
various degrees of freedom are assumed to be unaffected by the presence
of a small amount of damping. Vectors are used for the analysis of the
results of forced vibration by making a polar plot (called the Argand
plane) of the displacement vector (amplitude and phase angle). In the
vicinity of resonance, the resulting curve would be an approximately
circular arc. Each point on the circle locus corresponds to a value of
frequency.
In the modified Kennedy-Pancu method, the resonant frequency is de-
fined to correspond to the point of the Argand-plot curve having maximum
change in arc length (As) per fixed change in frequency (Auj) . The
change in arc length AS can be determined approximately in analytical
fashion as the response amplitude (W/q) multiplied by the difference in
the phase angles corresponding to the two distinct frequencies (separated
by Alt)) , i.e.
As = (W/q) Acp
The parameter As/Au, is plotted versus excitation frequency in figure
16 for a specific angle of orientation, 9 = 10 .
As can be seen in the figure, the curves exhibits sharp spikes and
thus the Kennedy-Pancu resonant frequencies, i.e. the frequencies cor-
responding to the maximum points, can readily be found. The results obtained
in this fashion for all of the plates used by Clary are tabulated in Table II.
A discussion of experimental methods used to determine material
damping in composite materials is presented in Appendix H. Here the damping
ratios are calculated by using the modified Kennedy-Pancu method as expressed
in equation (B-69), Appendix B. It is noted that the damping ratio is the
40
ratio of material damping coefficient to critical material damping coef-
ficient. The results associated with each mode are tabulated completely
in Table II.
The nodal patterns of the first five modes are calculated from the
response at selected points on the surface of the plate. Twenty-five
points in the x direction and five points in the y direction are used.
The nodal patterns are shown in figures 17-22. The results appear to
be in good agreement with the data of ref. 13.
41
VI. CONCLUSIONS
The analyses in Sections II and IV were developed for the vibra-
tional problem of composite-material plates with thickness-shear flexibility
and material damping. The theory used in the analyses is that of Yang,
Norris, and Stavsky (ref. 25), which can be considered to be the laminated,
anisotropic version of Mindlin's dynamic plate theory.
To account for the effects of thickness-shear deformation, a shear
correction factor K was introduced. A variety of methods to arrive at
an appropriate shear factor have been proposed for homogeneous plates;
the most popular ones resulted in K = 0.833 for a static distribution
(ref. 44) and 0.822 for the dynamic case (ref. 26). Srinivas et al.
(ref. 35) showed that use of either of these values for K in Mindlin's
plate theory gives a very close approximation to the lower natural fre-
quencies computed by exact, dynamic, three-dimensional elasticity theory
for rather thick, homogeneous, isotropic rectangular plates simply sup-
ported on all edges.
Unfortunately to date no one has proposed a means of rational
calculation of the shear factor for a laminated plate. Srinivas et al.
made an exact, dynamic three-dimensional elasticity analysis of simply
supported laminated plates. However, their analysis is quite tedious
computationally and thus they have presented numerical results for only a
very limited number of cases.
42
In the present Investigation, both static (Jourauski shear theory)
and dynamic (Mindlin type analysis for pure thickness-shear motion)
approaches were used to derive a shear factor K for laminates.
An assessment of the accuracy of these theories was made by com-
paring the lowest eigenvalues calculated by the laminated, shear-flexible
plate theory with the laminated, three-dimensional exact values given
by Srivinvas et al. (ref. 35).
It has been found that the shear factor K for a laminate is not
the same value as that for a homogeneous, isotropic member. The numberical
examples indicated that the value of K depends on the layer properties
and the stacking sequence of the laminate.
Using peak-amplitude and modified Kennedy-Pancu methods, the first
five resonant frequencies were calculated for various laminated boron/
epoxy plates with all edges free. The resonant frequencies obtained by
the two techniques differed by only a very small amount, and were in good
agreement with the results obtained both experimentally and analytically
by Clary (ref. 13). Furthermore, the nodal patterns have been found to be
satisfactory or as good as the data given by Clary. Finally, the damping-
ratio results were in good agreement with the experimental ones obtained
by Clary. No comparison with analytical results for Imainated-plate
damping could be made, since they have not been available previously.
43
APPENDIX A
NOTATION AND TRANSFORMATION FOR ELASTIC COEFFICIENTS
The generalized Hooke's law (Cauchy equations) for a general
anisotropic material in terms of rectangular coordinates x,y,z are as
follows:
/ \a
XX
ayy
azz
°y*
axz
a1, xyj
» =
" Si
C0121
C21
C41
C51
C.,61
'12 "13
"22 "23
"32 "33
"42 "43
'52 "53
'63
'14
'24
'34
"44
'54
'64
'15
'25
'35
"45
'55
'65
C16
C26
C36
C46
C56
c"66
<
f -\eXX
eyy
Gzz
ey2exz
exyv J J
(A-l)
where 0. . and e.. are stress and strain components, and C . are the1 J 1 J Kit
Cauchy stiffness coefficients for a three-dimensional body. It can
be shown that the matrix of Cauchy coefficients is symmetric, provided
that the material is conservative (elastic) , so that
(A'2)
Usually a single layer of fiber-reinforced composite material has
the fibers oriented more or less parallel to the top and bottom surfaces
44
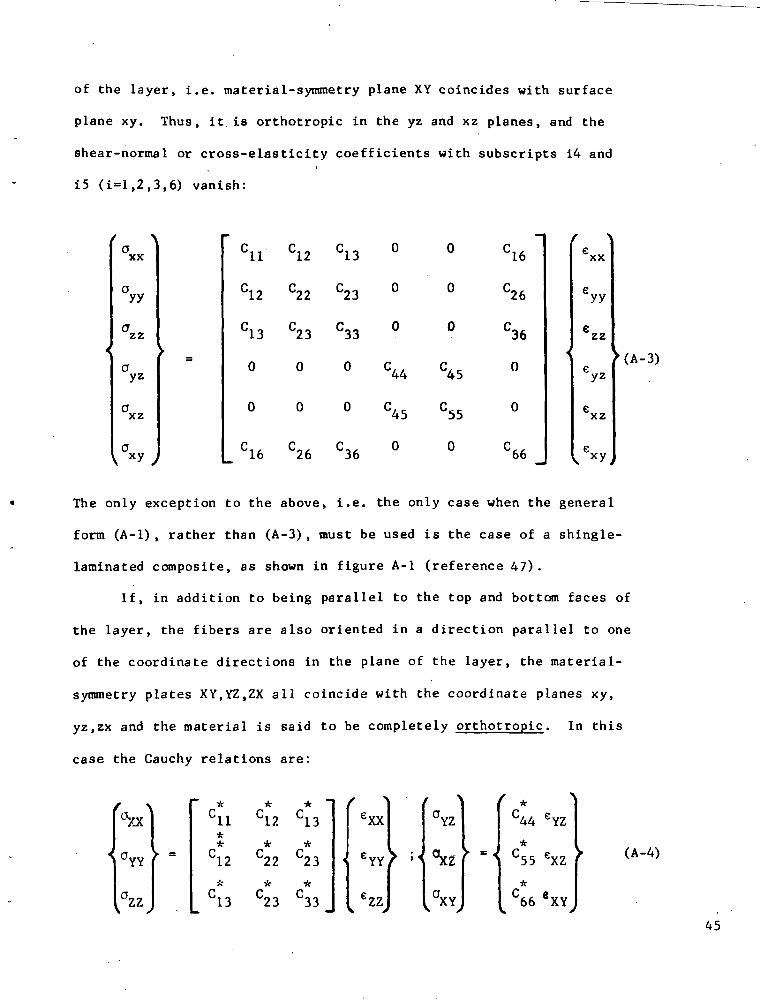
of the layer, i.e. material-symmetry plane XY coincides with surface
plane xy. Thus, it is orthotropic in the yz and xz planes, and the
shear-normal or cross-elasticity coefficients with subscripts i4 and
i5 (i=l,2,3,6) vanish:
/ \a
XX
°yy
azz
ayz
Oxz
o
=
12
12
22
13
23
33
44
45
45
55
16 26 36
—C16
C26
c36
Q
0
C66_
/ \exx
eyy
ezz
eyz
exz
,exy
The only exception to the above, i.e. the only case when the general
form (A-l), rather than (A-3), must be used is the case of a shingle-
laminated composite, as shown in figure A-l (reference 47).
If, in addition to being parallel to the top and bottom faces of
the layer, the fibers are also oriented in a direction parallel to one
of the coordinate directions in the plane of the layer, the material-
symmetry plates XY,YZ,ZX all coincide with the coordinate planes xy,
yz,zx and the material is said to be completely orthotropic. In this
the Cauchy relations are:
» . . . % . f N
r°xx1
°YY
>,
* -
* * *r r rCll C12 C13** * *
C12 °22 C23
* * *C13 C23 C33_
'
X^ '
6 XX
6YY
^ ;<1[ezzj
°YZ
\i
°XYV. y
Y =
*C44 £YZ*
C55 eXZ
*CM «XYDo XY^ s
(A-4)
45
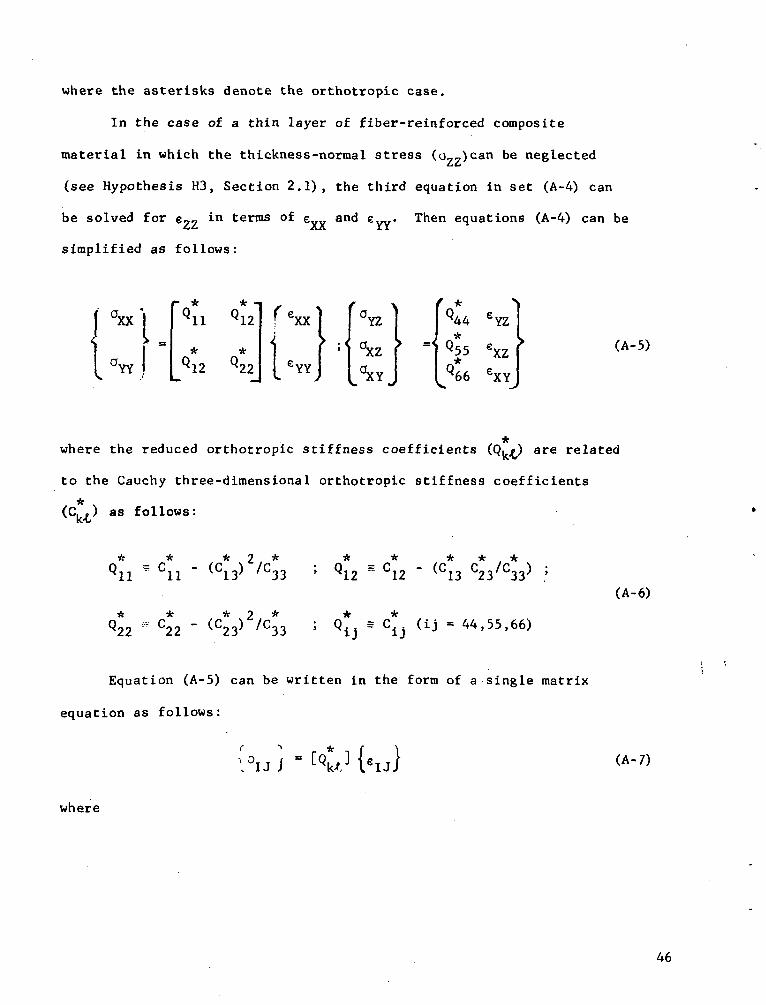
where the asterisks denote the orthotropic case.
In the case of a thin layer of fiber-reinforced composite
material in which the thickness-normal stress (o77)can be neglectedLtC*
(see Hypothesis H3, Section 2.1), the third equation in set (A-4) can
be solved for e77 i-n terms of evv and e...,. Then equations (A-4) can be<£^ XX II
simplified as follows:
°xxj
1 =°YY
V ..'
r * * -\Qll Ql2
* **12 ^22
f e x x '
1*
eYYJ
' ;<
r %
°YZ
^CZ
SCY^ •/
> =<
f * 1Q44 6YZ*
Q55 exzQ66 eXY
^ ^/
(A-5)
where the reduced orthotropic stiffness coefficients are related
to the Cauchy three-dimensional orthotropic stiffness coefficients
(C. f) as follows:
* 2 *(C13> /C33
* * * *C ' (C C / C )
12
22
13 2 3 3 3
(ij = 44,55,66)
(A-6)
Equation (A-5) can be written in the form of a single matrix
equation as follows:
where
(A-7)
46
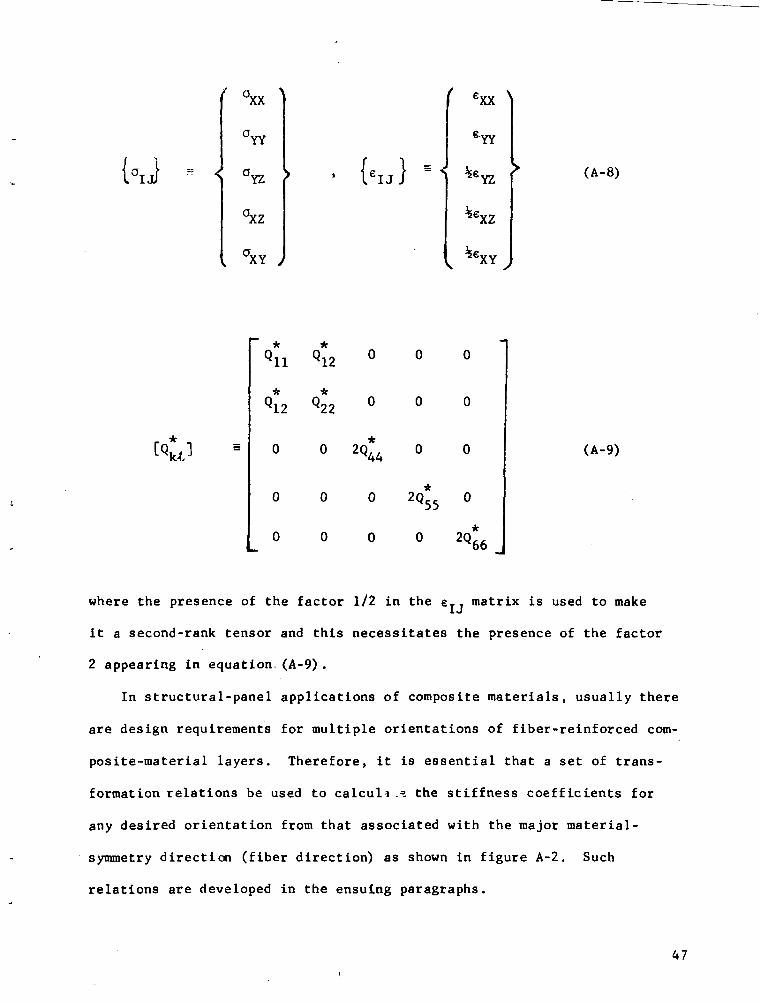
= <
( °xx 1
°YY
°YZ
°XZ
CXY ;
fcxx
6YY
5eYZ
^exz
5eXY
(A-8)
*
*'12
0
0
0
*
*Q22
0
0
0
0
0
2<4
0
0
0 0 0
(A-9)
where the presence of the factor 1/2 in the e matrix is used to makeLtj
it a second-rank tensor and this necessitates the presence of the factor
2 appearing in equation.(A-9).
In structural-panel applications of composite materials, usually there
are design requirements for multiple orientations of fiber-reinforced com-
posite-material layers. Therefore, it is essential that a set of trans-
formation relations be used to calculi .= the stiffness coefficients for
any desired orientation from that associated with the major material-
symmetry direction (fiber direction) as shown in figure A-2. Such
relations are developed in the ensuing paragraphs.
47
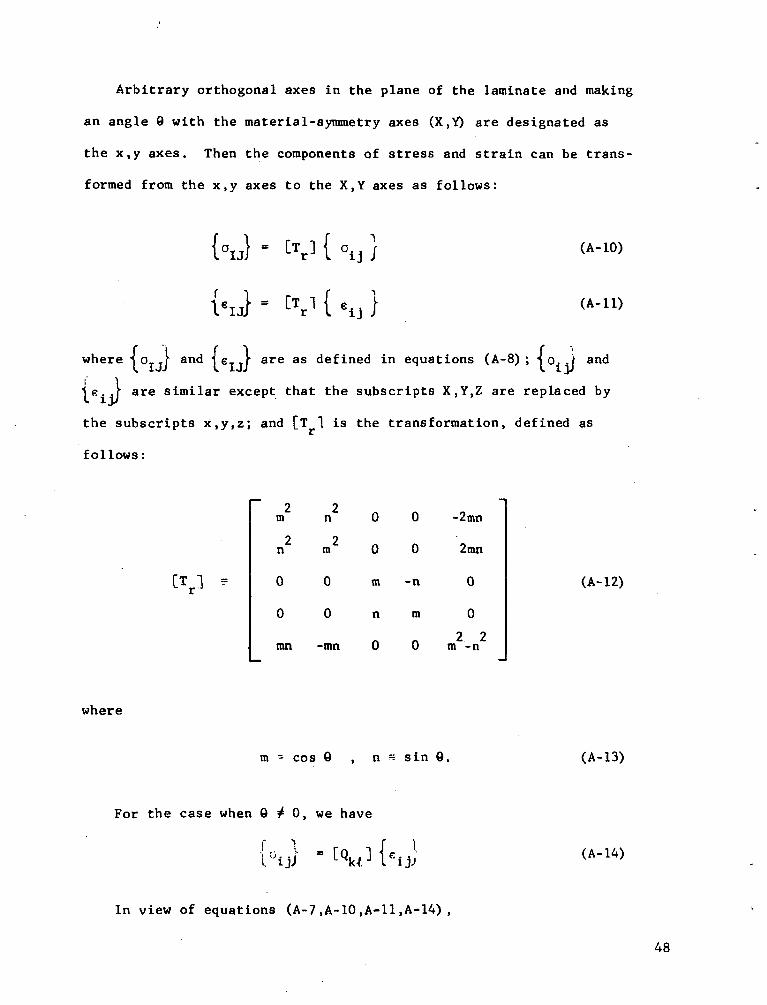
Arbitrary orthogonal axes in the plane of the laminate and making
an angle 9 with the material-symmetry axes (X,Y) are designated as
the x,y axes. Then the components of stress and strain can be trans-
formed from the x,y axes to the X,Y axes as follows:
[VJ (A-10)
(A-ll)
where joTTf and jeTTf are as defined in equations (A-8) ; 1 0. .f and
1e..r are similar except that the subscripts X,Y,Z are replaced by
the subscripts x,y,z; and [T 1 is the transformation, defined as
follows:
J =
2m
2n
0
0
mn
2n
2m
0
0
-mn
0
0
m
n
0
0
0
-n
m
0
-2mn
2mn
0
0
2 2m -n
(A-12)
where
m - cos 9 , n =- sin 9. (A-13)
For the case when 9 ^0, we have
In view of equations (A-7,A-10,A-11,A-14),
(A-14)
48
By substituting equations (A-9) and (A-12) and then performing
the matrix operations indicated in equation (A-15) the elements of
k»3 matrix are related to those of the [Qk»the [Q»3 matrix are related to those of the [Q»] matrix as follows
* 4 * * 2 2 * 4Qn = Qnm + 2 (Q12 + 2Q66) m n' + Q^n
* 4 * * *22 * 4Q12 = Q12m + (Qu + Q22 - 4Q66)m n + Q^n
* 4
* 4 * * * * 2 2 * 4Q66m + (^11 + Q22 - 2^12 ' 2(*t>6>m n + Q66n
n - <2(
= Q44m* 2 * 2
Q45 = Q55mn - Q44mn
Q55 - Q55ra* 2 * 2
49
APPENDIX B
MODELS AND MEASURES OF MATERIAL DAMPING
Bl. Mathematical Models for Material Damping
Internal friction or damping in materials can be caused by a variety
of combinations of fundamental physical mechanisms, depending upon the
specific material. For metals, these mechanisms include thermoelasticity
on both the micro and macro scales, grain boundary viscosity, point-
defect relaxations, eddy-current effects, stress-induced ordering, inter-
stitial inpurities, and electronic effects (reference 48) . According to
Lazan (ref.48), little is known about the physical micromechanisms
operative in most nonmetallic materials. However, for one important class
of these, namely polymers and elastomers, considerable phenomenological
data have been obtained. Due to the long-range molecular order associated
with their giant molecules, polymers exhibit rheological behavior inter-
mediate between that of a crystalline solid and a simple liquid. Of
particular importance is the marked dependence of both stiffness and damp-
ing on frequency and temperature.
The purpose of developing a mathematical model for the rheological
behavior of a solid is to permit realistic results to be obtained from
mathematical analyses of complicated structures under various conditions,
such as sinusoidal, random, and transient loading. According to reference
48, as early as 1784 Coulomb recognized that the mechanisms of damping
50

operative at low stresses may be different than those at high stresses.
Even today, after more than 2500 publications on damping have appeared,
major emphasis is placed on linear models of damping for several reasons:
they have sufficient accuracy for the low-stress regime and linear analyses
are computationally more economical than nonlinear ones.
The simplest mathematical models of rheological systems are single-
parameter models: (1) an idealized spring, which exhibits a restoring
force linearly proportional to displacement and thus displays no damp-
ing whatsoever, and (2) an idealized dashpot, which produces a force
linearly proportional to velocity. Obviously, neither of these models
are very appropriate to represent the behavior of most real materials.
The next most complicated models of rheological systems are the
two-parameter models: (1) the Maxwell model, which consists of a spring
and dashpot in mechanical series, as shown schematically in figure B-l(a);
and (2) the Kelvin-Voigt model, which is comprised of a spring in
parallel with a dashpot, as shown in figure B-l(b) . The Maxwell model
is a fair approximation to the behavior of a viscoelastic liquid. How-
ever, as a model for a viscoelastic solid, it has several very serious
drawbacks (reference 48); there are no means to provide for internal
stress and for afterworking. The Kelvin-Voigt model overcomes these
deficiencies and is a first approximation to the behavior of a viscoelastic
solid. However, it has the following disadvantages (reference 48): there
is no elastic response during application or release of loading, the
creep rate approaches zero for long durations of loading, and there is
no permanent set irrespective of the loading history.
51
It should be mentioned that the Kelvin-Voigt model is the simplest
one which permits representation as a complex quantity when subjected to
sinusoidal motion. To show this, one can write the following differential
equation governing the motion of a single-degree-of-freedom system con-
sisting of a sinusoidally excited mass attached to a Kelvin-Voigt element:
mu + cu + k u = F eiUJt (B-l)
where m = mass, c & viscous damping coefficient, k = spring rate, F s
exciting force amplitude, UJ H circular frequency of exciting force,
u s displacement, i = V-l , t & time, and a dot denotes a derivative
with respect to time. Assuming that sufficient time has passed for the
*transients to die out, we can write the steady state solution of equation
(B-l) as follows:
~ i(uut-cp) ~ r/1 2.^ . -,-1 i&t ,_ 0,u = u e = F [(k-muu )+ iuucj e (B-2)
where cp = phase angle between the response (u) and the exciting force,
and u s displacement amplitude.
It is noted that the terms containing Kelvin-Voigt coefficients k and
iac can be grouped into a single Kelvin-Voigt complex stiffness (k) as
follows :
*It can be shown that they do die out for a mechanical system, for which
c, m, and k are all positive quantities.
52
k = k + i'juc (B-3)
Alternatively, the Kelvin-Voigt element coefficient could have
been grouped into a single complex damping coefficient (c) as follows:
c = c - (i k/!i,) (B-4)
The force (Fd) in a dashpot is given by
F = c ii = i o i c u e " (B-5)d
The energy dissipated per cycle (U.) is a dashpot undergoing
sinusoidal motion can be calculated as follows:
P -2rr/ju ~U = A F.du =1 F u dt = nc.i-.7i (B-6)
o
In 1927, Kimball and Lovell (reference 49) observed that many
engineering materials exhibited energy losses which were contradictory
to equation(B-6). Specifically, they found that U, was proportional
~2to u but independent of ou, i.e.
(B-7)
~Later work by Wegel and Walther (reference 50)also showed that U , oC u
but C1 was a weak function of ju. Still later, for stresses below thed
2fatigue limit of the mater ial , Lazan (references 48,51) showed that U.oCu
and C was pract ical ly independent of x.d
53
Equating the energy dissipated per cycle in the Kimball-Lovell
material, equation (B-7), to that in the dashpot, equation (B-6), one obtains
C' = TTCUJ (B-8)
To utilize the Kimball-Lovell observation in practical structural
dynamic analyses, it was desirable to have an expression for the as-
sociated damping force, i.e. an equation analogous to equation (B-5), which
governs a dashpot. According to Bishop (reference 52) this was first done
by Collar. Combining equations (B-5 , B-8), one obtains the following
"frequency-dependent damping" relation:
Fd = (b/'ju) u (B-9)
where b is a constant given by
b = C'/TT (B-10)d
The kind of damping represented by equation(B-9)has been called fre-
quency-dependent damping, since the usual dashpot coefficient c is now
replaced by the quantity b/uj.
For the damper represented by Eq.(B-9),it is convenient to replace
k in the undamped system by the following Kimball-Lovell complex stiffness
(reference 53):
k1 = k + ib (B-ll)
where it is now noted that both k and b are assumed to be independent of
frequency. This representation has been used extensively in aircraft
54

structural dynamic and flutter analyses (references 54,55).
An alternative to equation (B-ll), is to use the concept of a complex
damping coefficient, originated by Myklestad (reference 56), in which the
spring constant is replaced by
k" = C eim (B-12)
where C.. and m are constants.
Although Kimball and Lovell's original work was based on data
obtained during steady-state sinusoidal motion, the models represented
by equations (B-9, B-ll, B-12) have been applied to free vibrations as
well (refs. 52,53,57). To alleviate the difficulty of the interpreting of
a; in equation(B-9)for the case of free vibration or for multiple-fre-
quency forced vibration, Reid (reference 58) suggested the following form:
Fd = b | u/u | u (B-13)
where the bars denote that the absolute value of the quantity between
them is to be used.
In summary, four different versions of material damping have been
discussed. In terms of the differential equation for free vibration,
they may be written as follows:
mu' + (b/.j,) u + ku = 0 (B- 14a)
mu + (k + ib) u = 0 (B-14b)
mu + Cl eim u = 0 (B-14c)
mu + bju/u | u + ku = 0 (B-14d)
55
The models represented by equations (B-14) have been criticized
by many investigators for various reasons:
1. In equation (B-14a), the interpretation of a. is dubious (refer-
ences 58,60). Milne (reference 59) suggested that it is associated with the
imaginary part of the pair of complex roots, but went on to state that
there is no clear justification for this interpretation.
2. Equations (B-14b) and (B-14c) are equations with complex coef-
ficients and the meaning of this is not clear (references 57,59) . Further-
more, although they have complex exponential solutions, neither the real
nor imaginary parts alone are solutions (references 59,60).
3. Equation (B-14d) is a nonlinear differential equation, due to
the behavior of |u/uj (reference 59).
4. None of the models represented by equations (B-14) can be sim-
ulated, even on a conceptual basis, on an analog computer (references
58, 60).
5. The model represented by equation (B-14a) does not meet the
Wiener-Paley condition (references 61,62) of causality for physically
realizable systems, as was shown in references 60, 63-65..
6. Equation (B-14b) fails to give the proper relations of a
damping force that is proportional to displacement and in phase with
velocity. This can be alleviated by use of a more unwieldy expression
proposed in references 66,67.
Incidentally reference 68 claimed that none of the equation
(B-14) models result in energy dissipation that is independent of
di (the reason for abandoning the Kelvin-Voigt model). However, an error
in this reasoning, which makes it invalid, was pointed out in reference
69.
56
It can be shown that the sinusoidally forced vibration version of
free vibration equations (B-14«,b,c) are exactly equivalent. Probably
the most popular form for writing this is as follows:
mu' + (k + ib)u=F elajt (B-15)
The major criticism of the use of equation (B-15) is that it results
in a conventionally defined magnification factor (see Section B2) , correspond
ing to zero frequency, which is not equal to unity for g / 0 (reference 52) .
This difficulty can be eliminated by redefining the magnification factor as
follows:
MF' = u/u' (B-16)S w
where
and k1 is the stiffness coefficient associated with the total in-plane force
amplitude, i.e.
k'5(k2+b2)*
Thus,
MF' = (k2+b2) /[(k-muJ2)2+ b2]* = (1 + g2)*/[(l-uu2/uu2)2+g2^n
The major advantages of using the equation (B-15) model for steady-
state vibrational and flutter analyses are as follows:
1. The analysis is considerably simplified in comparison with that
for viscous damping, as pointed out in reference 70.
2. The analysis is linear.
3. The complex -modulus concept has long been in common use, especially
57
in connection with measurement of the damping properties of elastomers,
polymers, etc. (reference 69).
4. The complex-stiffness approach has been used very successfully
in flutter analysis for approximately three decades refs. 54, 55, 69, 71).
In view of these considerations, the complex-stiffness approach is
used in the main portion of the present report. However, for completeness
and comparison, a number of other more complicated approaches are also dis-
cussed in this section.
To overcome some of the deficiencies of the Kelvin-Voigt and Max-
well models, they were combined in various ways to obtain the three-para-
meter models shown in figure B-l(c) and (d). It can be shown (reference
72) that by properly selecting the values of the coefficients, the two
models can be used interchangably. In other words, the model repre-
sentation is not unique. In fact, both representations have been called
the "standard linear solid", "standard linear material," "simple an-
elastic model", or "standard model of a viscoelastic body" (references
73-76). Unfortunately, few materials have been characterized by the use
of the standard linear solid. Perhaps the most extensive characterization
has been carried out for flexural vibration of 2024-T4 aluminum alloy:
by Granick and Stern (reference 77,78 ) in air and by Gustafson et al
(reference 79) in vacuo.
Obviously one can go on from a three-parameter model to a four-
parameter one, etc. Continuing this process, one obtains two well-
known models (reference 74): the Kelvin chain, shown in figure B-2(a),
and the generalized Maxwell model, shown in figure B-2(b). The be-
havior of such systems can be written in either differential or integral
form, as discussed in detail in reference 74. However, the complexity of
58
such a model has limited its use both experimentally (in characterizing
engineering materials) and analytically (in performing dynamic analyses).
Thus, for engineering applications, there is a continuing search for
models which are simple, yet represent the behavior of real materials
with sufficient accuracy.
A^relatively simple model, which is somewhat similar to the generalized
Maxwell one, is due to Biot (reference 80 ); see figure B-2(c) . The number of
simple Voigt elements in this model is allowed to increase without bound,
so that the damping force is represented by the following expression:
rtFd = 8lJ Ei [-e(t-T)](du/dT) dt (B-
*1where T is a dummy variable; e,g-i = parameters, end Ei(u) is the exponential
integral
r~u -£Ei (u) =1 (e /?)d? (B-18)
00
Caughey (ref. 60) made a detailed study of Biot's model for both
free and forced vibration. He showed that for a/e > 10, the energy dis-
sipated in Biot's model is within 4% of being independent of frequency
and thus essentially depends only upon the square of the displacement
amplitude. Milne (ref. 59) studied the Biot model by means of the con-
volution integral.
Neubert (reference 81) introduced a variant of the Biot model, in
which a different distribution function for the local stiffness-damping
ratio is used. Milne (ref. 59) also studied this model via the convolution
integral. Milne introduced a new synthesized model of his own. However,
59
the main conclusion of his investigation was that, for practical engineer-
ing purposes, the choice of a rheological model is not critical, provided
that the range of constant damping is kept the same and the damping is
sma 11.
The linear hereditary theory of material damping was originated in
1876 by Boltzmann (reference 82). In this theory, the energy loss is
attributed to the elastic delay by which the deformation lags behind
the applied force. It is called a hereditary theory because the in-
stantaneous deformation depends upon all of the stresses applied to the
body previously as well as upon the stress at that instant. The damping
force is given by
Fd = J *(t'T) u(T) dT
where t == actual time, T = an instant of time (dummy variable), u =
displacement, and § =• hereditary kernel or memory function. Often the
hereditary kernel depends upon the difference (t-T) only; then equation
B-19) becomes:
F, = *(t - T) u (T) dT (B-20)d v
It is most advantageous to determine the hereditary kernel from
experimental data. It has been found to be a monotonically decreasing
function which can be represented mathematically as follows:
n
$ (t) =yA..e"ait (B-21)
Such a system is said to have a heredity of degree n and A. and Q.
60
are called heredity constants. Hobbs (ref. 75) has shown that a first-
degree hereditary model is equivalent to a simple anelastic model
(standard linear solid).
Volterra (reference 83) has presented a method of determining the
hereditary kernel from material response to either suddenly applied
loading or to sinusoidal excitation. He also presented plots of mag-
nification factor and phase shift verus frequency for a wide range of
parameters of a single-degree-of-treedom system with first-degree
hereditary damping. For certain combinations of the parameters, the
magnification and phase characteristics are quite different from that
of a viscously damped system; yet for certain other combinations, the
characteristics are quite similar.
Numerous nonlinear mathematical models have been proposed to per-
mit better correspondence between theory and experiment. However, all
of them, by their very nonlinear nature, are more complicated to apply
in structural dynamic analyses of practical engineering systems. Perhaps
th« simplest one is damping energy per unit volume and per cycle pro-
portional to stress to a power (ref. 48):
Udv= Cdom (B-22)
where C. and m are material constants and <r is the cyclic stress
amplitude. It is noted that m=2 corresponds to the Kimball-Lovell re-
lation (linear theory) discussed previously. It has been found that m
varies from 1.8 to 6.0, generally being near 2.0 at low stress amplitudes,
The hysteresis loop associated with the complex-modulus model,
equation (B-ll), is elliptic in shape; see figure B-3(a). However,
61
the hysteresis loops determined experimentally have sharp corners at both
ends and are nearly linear in the low-stress, low-strain region, as shown
in figure B-3(b). According to ref. 48 (page 97), in 1938 Davidenkov
proposed a nonlinear mathematical model which results in a similar shape
of hysteresis loop. Further work on this class of model has been carried
out by Pisarenko (reference 84).
Rosenblueth and Herrera (reference 35) proposed a nonlinear model
which eliminates the causality difficulties of the complex-modulus model.
Chang and Bieber (reference 86) introduced a nonlinear hysteresis model '
in which there is no hysteresis damping unless the displacement amplitude
exceeds a certain threshold value.
B2. Measures of Material Damping
In this section, various definitions of damping are discussed in
the context of a complex-modulus material.
Energy Dissipation Under Steady-State Sinusoidal Vibration. - Energy
dissipated per cycle (U,) in the form of internal frictional heating is
one measure of damping. However, this quantity depends upon the size, shape,
and dynamic stress distribution (which in turn, depends upon the particular
mode of vibration). In view of the above difficulties, the specific damping
energy (U, ) is usually considered to be a more basic property of the
material. rather than the structure. The U, is defined as the damping energy
per cycle and per unit volume, assuming a uniform dynamic stress distribution
throughout the volume considered. Thus, the total damping energy is
U. = <p IT dV (B-23)d J dv
62
where V -.- volume. The usual units of U, are in-lb/cycle and of U. ,d dv
in-lb/in -cycle.
Resonant Magnification Factor Under Steady-State Sinusoidal Ex-
citation. - The resonant magnification factor (RMF) is defined as the
dimensionless ratio of the response at resonance to the excitation,
where both the response and the excitation must be specified in the
same units (see figure B-4). These quantities may be in units of dis-
placement, velocity, acceleration, or strain. Unfortunately, the re-
sonant magnification factor is dependent upon the structural system con-
figuration as well as upon the damping property of the material, so that
it is considered to be a system characteristic, rather than a basic material
property.
Incidentally RMF is not applicable to nonlinear systems, since then
it depends upon the excitation level. (In a linear system, RMF is independ-
ent of the level of excitation.)
Bandwidth of Half-Power Points Under Steady-State Sinusoidal Excitation.
The separation (uu-iu..) between the frequencies associated with the half-
power points increases with an increase in damping (see figure B-5) and thus
can be used as a measure of damping. A more meaningful definition is to
normalize by the associated resonant frequency (uu ), i.e. use the dimension-
less bandwidth given by:
- a; )
This measure is the basis for determination of damping by the original
Kennedy-Pancu method (reference 87).
The quality factor Q is defined as the reciprocal of the dimensionless
63
bandwidth.
Derivative of Phase Angle with Respect to Frequency, at Resonance.
This measure is the basis for determination of damping by an improvement
(reference 88) of the Kennedy-Pancu method.
Loss Tangent Under Steady-State Sinusoidal Excitation. - Applying
the complex-stiffness (see Section Bl) to the material property represent-
ing stiffness, namely the Young's modulus (E), we obtain
E - ER(1 + ig) (B-24)
*Thus, the loss tangent is defined as follows:
g ? El/ER (B-25)
I ** R ***where E = loss modulus and E is called the storage modulus.
Referring to figure B-6, we obtain the following relation:
g = tan Y = ET/ER (B-26)
or
v = arctan EX/ER (B-27)
*Also known as the "loss coefficient", "loss factor", or "damping
factor".
**Also sometimes called the "dissipation modulus."
***Also sometimes called "elastic modulus" or "real modulus."
64
The quantity Y is called the loss angle and equation (B-26) explains
the origin of the term loss tangent for g.
Cyclic Decay of Free Vibrations. - In a linear system, free vibrations
decay exponentially (see figure B-7). The larger the damping, the faster
is the decay. Thus, the logarithmic decrement 6 is defined as follows:
6 = in (3,/a. J (B-28)
where Ln ^ natural logarithm.
For a power-law material, eq. (B-22), to have 6 independent of
amplitude, m must be 2 (see Section B3 for proof). When m=2, the follow-
ing means of calculating 6 is more practical, especially when damping
is small:
6 = (1/n) t.n (a./a ) (B-29)
where n is any arbitrary integer.
Temporal Decay of Free Vibrations. - Another measure associated with
the decay of free vibrations is the temporal decay constant v , defined as
follows (reference48, foldout opposite p. 35):
vt - (tj-tj)"1 >,n [u(t1)/u(t2)] (B-30)
where t, and t_ are two different values of time, arbitrary except that
t~ > t1 and (t~ - t ) must be an integer number of periods of damped
vibration. The quantities u(t.) and u(t2) are the respective displacements
at times t, and t2. It is seen that the usual units for v are sec
65

An alternate way of specifying the temporal decay is the decay
rate v , which has units of decibals per second (db/sec) and is defined
as follows:
or
t - 20 (t2-t1)"1 log [u(t1)/u(t2)] (B-31)
-1 Vt(t2"tl)Yt = 20(t2-t1) log e = (20 log e)vt ** 8.68 V(;
where log = logarithm to the base 10.
Spatial Attenuation of a Plane Wave in a Slender Bar. - If
one propagates a plane, harmonic wave in a slender bar made of a homo-
geneous, linear material, the wave exhibits exponential decay with axial
position (x), analogous to the temporal decay of free vibration (which
may be consiered as a standing wave). Analogous to the logarithmic de-
crement (see above), we have the logarithmic attenuation 6 , defined ass
follows in terms of amplitudes a(x..) and a(x~) at stations x.. and x?:
6S = [a(x1)/a(x2)] , (B-32)
Analogous to the temporal decay constant, we define the spatial
attenuation constant v as follows:. s
vs 5 <X2'X1)"1 '-n Ca(x1)/a(x2)] (B-33)
The unit of v is in" .s
Finally, analogous to the decay rate, we define the spatial
attenuation rate y as follows:~ S
66
Ys - 20(x2-x1)"1 log [a(x1)/a(x2)] ~ 8.68 v^ (B-34)
The unit of y *s db per unit length.8
It should be cautioned that the determination of damping by wave
attenuation requires that the cross section of the bar be compact (pre-
ferably round or square) and that the largest cross-sectional dimension
be very small compared to the wave length of the traveling wave. Further-
more, the two stations along the bar, at which the wave measurements are
made, must be: (1) sufficiently far from the point of impact that initial
transients have died out and (2) sufficiently far from each other so that
a measurable change in amplitude occurs. Kolsky discussed these points
in detail in reference 89 .
1
B3. Inter-Relationships Among Various Measures of Damping
for Homogeneous Materials
Here we consider a single degree-of-f reedom system consisting of a
mass supported on a mass less spring made of a homogeneous Kimball-Lovell
or complex-modulus material. Then the governing differential equation
for simple harmonic excitation is equation (B-15), which has the following
steady-state solution:
u = u e " (B-35)
where
u ? F [(k-mo2)2 +b2]'1/2 (B-36)
rp s arctan [b/(k-tmu2) ] (B-37)
The magnification factor (MF) is defined as fol lows:67
MF = u/u (B-38)8t
where u is the so-called static displacement, defined as follows:S L
u = F/k (B-39)S C
Combining equations (B-36, B-38, and B-39), one obtains the
following relation:
MF ={[1 - (uj/u, )2]2+ (b/muj2)2 }"1/2 (B-40)I n n J
where u; is the natural frequency (i.e. the resonant frequency of the
undamped system) , given by:
1 /2a, = (k/m) ' (B-41)n
The critical material damping coeff ic ient (b ) is the minimum value
of b for which the free vibratory motion is non-oscillatory. It
is obtained from the following relationship:
2 2(b /2mu.' ) = k/m = uue n n ,
or
b = 2mu. 2 (B-42)e n '
The damping ratio £ is defined as follows:
C - b/bc (B-43)
Combining equations (B-40, B-42, and B-43), one arrives at the
following general, dimensionless relationship: ,„
MF = {[l-(uu/U)n)2]2 + 4£2}~1/2 (B-44)
It is seen easily that MF is a function of only two parameters: the fre-
quency ratio (ii)/uu ) and the damping ratio (Q . It should be mentioned
that equation (B-44) is somewhat different than the known relationship
for a single-degree-of-freedom Kelvin-Voigt viscously damped system,
even though the damping ratio £ is defined analogously ( = c/c ,
where c = 2moj ) .c n
The resonant magnification factor (RMF) is defined as the value
of MF at resonance, which is taken here to occur when cp = 90 . In view
of equation (B-37) , this implies that the resonant frequency is ou .
Thus, at resonance, equation (B-44) reduces to the following simple
expression:
RMF = (2£)-1
(B-45)
Thus, it is seen that the same simple relationship between the damping
ratio and the resonant magnification factor holds as does for a Kelvin-
Voigt system. Although the resonant amplitude can be measured accurately,
there are problems in measuring the static deflection in complicated
structures (due to signal-to-noise ratio limitations of instrumentation).
For this reason, in structural dynamics, RMF is seldom used as a measure
of damping.
The damping energy, i.e. the energy dissipated per cycle, can be
computed as follows:
U, = J> FJ du = j F,u dt (B-46)d J d J do
where F. is the damping force, given by
69
(B-47)
Substituting equations (B-35) and (B-47) into equation (B-46) and
integrating, we obtain the following result:
U. = rrb 1? (B-48)d
To convert equation (B-48) to the form of equation (B-22) , with
m=2 , it is necessary to divide by the volume and to relate 11 to Cf.
Now the force amplitude is
? = Aa = kii (B-49)
where A - cross-sectional area.
Assuming the spring is a mass less and uniform bar, we have
k = AE/L (B-50)
where L z effective length of spring and E •-= Young's modulus of the bar.
Combining equations (B-48, B-49, B-50), one obtains the following result;
j " UJ/V • (nbL/A) (o/E) 2ds d
Comparing the form of equations (B-22) and (B-51) , we see that
for a Kimball-Lovell mater ia l , m = 2 and
C. = TtbL/AE2 (B-52)d
It should be noted that Lazan (reference 48 , chap. II) has shown
that these results are independent of the stress distribution and the
specimen geometry, provided that ra = 2.
70
In view of equations (B-42, B-43, and B-44), equation (B-52) can
be expressed in the following more useful form:
C = 2ir (B-53)
According to equation (B-48) , the damping energy (and thus,
excitation power) is proportional to the square of the displacement
amplitude u (and thus, the MF). Then the power is one half of what it
is at resonance when MF = RMF//2. In view of equation (B-45), the half-
power magnification factor (HPMF) is related to the damping ratio as
follows:
HPMF = RMF//2 = (2/2 Q~l (B-54)
To determine the two sideband frequencies (j; = uu. and sO cor-
responding to half power, we combine equations (B-44) and (B-54) to
2obtain the following quadratic expression in n; :
(2/2
which has the following positive roots:
a;. , = a; (1±2 f)* (B-55)1 ti n
It is interesting to note that equation (B-55) is identical to the analogous
2expression for the lightly damped Kelvin-Voigt system, i.e. (c/c ) « 1.
For small damping (C « ^),
*1>2 * (i ± 0 %71

Thus, we get the following relation between the dimensionless bandwidth
and the damping ratio Q:
2£ (B-56)
In the original Kennedy-Pancu method (reference 87), this relationship is
used to determine the damping ratio from the geometry of an experimentally
determined Argand plot (a polar-coordinate plot of response amplitude
versus phase angle).
In terms of the quality factor Q, equation (B-56) may be rewritten
as follows:
Q ~ (2C)"1 (B-57)
It is interesting to note that in order for the half-power frequencies
to be real, the damping ratio £ must be no greater than /2/2 <** 0.707. How-
ever, this is not a severe limitation for actual structural materials.
The potential energy (strain energy) stored in our single-degree-of-
freedom mathematical model is given by:
(B-58)U = 4> F dus
where F is the spring force, given byS
F = kus (B-59)
Thus,
U = k J u du = ku2/2
Combining equations (B-48) and (B-60) , we obtain
U /U = 2rrb/kd
(B-60)
(B-61)
72
Using equations (B-41, B-42, B-43), we can rewrite equation (B-61)
in the following more useful form:
U,/U =d
or
C = (1/4TT)(U./U)d
(B-62)
(B-63)
The loss tangent is defined as follows for the system considered
here:
g = b/k (B-64)
Inserting equations (B-41, B-42, B-43) into equation (B-64) we
obtain the following useful relationship:
(B-65)
The following useful relationship, which is sometimes taken as a
fundamental definition of damping (reference 66), is obtained here by
combining equations (B-63) and (B-65):
g = 2C
g = (1/2TT)(0./U)d (B-66)
Taking the derivative of phase angle rp with respect to frequency
one obtains the following result from equation (B-37) :
dcp/du, = 2biW[(k-mu;2)2+b2] (B-67)
At resonance (subscript R) , defined by UF=UU = /k/m, equation (B-67)
becomes:
(dcp/do;)_ = 2mu. /bR n (B-68)
Combining equations (B-42, B-43, and B-68), we obtain the following
73
very useful result:
[uu (dqp/duj) ]n K-1
(B-69)
It is interesting to note that although the MF vs. ui relation,
equation (B-44), is different than the corresponding relation for a Kelvin-
Voigt viscously damped system, equation (B-69) is identical to its cor-
responding relationship for a Kelvin-Voigt system. Equation (B-69) is used
to determine the damping ratio from an experimentally determined Argand
diagram in the improved Kennedy-Pancu method (reference 88).
The transient solution of the system represented by equation (B-14a)
can be written as follows:
u' = 1J'e ' n sin (/l-£2 0) t - <p) (B-70)
From its definition in equation (B-28), the logarithmic decrement 6
can be determined as follows:
6 = In
where T is the period of damped oscillation, given by
T - (2TT/-JJn)d-C? -1/2
Thus, we now have
(1-C )2,-1/2
(B-72)
(B-73)
For small damping (£ «1) , equation (B-73) can be replaced by the
following approximate expression:
(B-74)
74
6 = TTg
Combining equations (B-65) and (B-74), one obtains the following:
(B-75)
In view of equation (B-63) and since the specific energies are
given by:
(B-76)
we have
, /4nUds s (B-77)
However, the specific strain energy is
U = o /2Es
(B-78)
A power-law-damping material is defined by equation (B-22).
Combining this relation with equation (B-78), one obtains:
(E C/8TT)om"2 (B-79)
Thus, it is clear that £ is independent of stress amplitude only for a
KL (Kimball-Lovell) material (m=2). Then
(B-80)
or, in view of equation (B-65),
g = E Cd/4rr (B-81)
Furthermore, since the logarithmic decrement of a KL material with
small damping is approximately proportional to the damping ratio as shown
by equation (B-74), the following approximate relation holds:
6 » E C./4d (B-82)
75
APPENDIX C
DERIVATION OF ENERGY DIFFERENCE
It is assumed that the generalized coordinate | and generalized
force f have the following forms:
(C-l)~ iuut
f = q e
where 5 is a complex form representing %» 0' 0» x and 1 •
The strain energy can be expressed as
n. t»U =
where Q.. are stiffness coefficients and U is the amplitude of the strain
energy given by:
n nU =(1/2) Y Y Q ? r (C-3)
i-> i-> ij i J
For the damping energy, a dissipation function suitable for material
damping (reference 90) is developed. Hence, we introduce a dissipation
energy function for material damping as follows:
n n n n(bij /UJ> Si 'Sj "< l u > / 2>I lQlj?Jje
2lUit"(i«)5e2la*.i-1 j-1
(C-4)
76

where b.. are structural damping coefficients, Q = ib.. and D is the
amplitude of dissipation energy given by:
n nA. ~,
The kinetic energy of the system is
(C-6)
where m . are inertia coefficients and T is the amplitude of kinetic
energy given by
n n
T = (a2/2) V Yn,^ |. (c-7)
The work done by the uniformly distributed normal force is
n
W = f Z ?i= B -21" <c-8)
where q is the amplitude of the normal pressure and W is the amplitude of
the work done
W = q ?. (C-9)
The Lagrangian equation takes the following form (reference 91)
77

Each term of equation (C-10) can be expressed in terms of its
amplitude as follows:
d ,0TX oT icut oD SD iuut=-~ e ' = ~ e
(C-ll)
dU at! iuut , W aw iuuti S -^— p f = — — = ^-» (3
a? ' a? ai
With equations (C-ll) introduced, one can rewrite equation
(C-10) as follows:
flllf"
(T + W - if - D) e E = 0 (C-12)
or
|~ ( T + W - U - D ) = 0 (C-13)o^
Equation (C-13) is analogous to one presented by Volterra (reference 83 ).
Thus, the amplitude of the Lagrangian energy difference can be
expressed as follows
L = (T + W) - (U + D) (C-14)
when used in conjunction with Hamilton's principle, expressed in equation
(36).
78
APPENDIX D
COMPLETE ENERGY EXPRESSIONS
Dl. The Energy Difference
M N 1 1
^T 7 f f {(A11/a2)(U 4' 4 )2+(2A10/ab)(U 4' f ) (V $ 4' )L L J J I 11 mn um un v 12 mn um un ran vm vn
m=l n=l 0 0
+2A.,(a"1U 4' $ Xa-1V 4' $ +b~1U $ 4' )16 mn urn un mn vm vn mn um un
+2A,,(b~1V I 41 Xa-1V 41' 4 +b~1U f 41 )+A,,(a"1V 41 $ +b~lumn$,,m
$1',n)
26 mn vm vn mn vm vn mn um un 66 mn vm vn mn um un
+2B 1 1(a~ 1U $' $ ) (a~\ 4' * )+2K.J(a~ lV 9' 9 Xb~*Y 4 41
11 mn um un xmn tyxm tyxn 12 mn um un ymn ^ym fyyn
+bV $ $' X a " ^ *', *. ) ] + 2 B . _ ( b " V $ «' X b " ^ 4 $' )mn vm vn xmn \|ixm \lixn 22 mn vm vn ymn fyym 4'yn
+2B1 ,L(a"1U $' $ Xa"1^ $' $. 4-b"^ *, *,' )+a"1V *• $16 mn um un ymn y ym ipyn xmn \)fxm fxn mn vm vn
+b"1U $ 4' Xa-1Y $,' *. )]+2B0,[b"1V $ $' )(a" l vC •*,' $.mn um un xmn \ j ixm 'Jlxn 26 mn vm vn ymn \j; ym ty yn
+b"1'if f, $! )+(a"1V $' $ +b~1U $ *' Xb'S $, $.' )]xmn \J|xm \jixn mn vm vn mn um un ymn ty ym jjiyn
+2B,,(a"1V *' * +b -1U $ $' ) (a" 1 Y 4 ft -t-b"1^ $ 4' )66 mn vm vn mn um un ymn di ym \|f yn xmn \jixm \ J jxn
+ (D 1 1 / a 2 ) ( > f »' 4 ) 2+(2D 1 0 /ab) (^ 4,' $ , ) (Y * 9' )11 xmn i|;xm ij;xn 12 xmn 'ty xm i|/ xn ymn ^ ym ty yn
+(D 0 0 /b 2)(Y * 4' )2+251,(a"1Y *' f Xa"1^ *' $22 ymn \|i ym \(| yn 16 xmn ty xm ^ xn ymn ^ ym ^ yn
+b"1Y 4 *.' )+2D.,(b"1Y 4 4' Xa"1* f 4 +b"1V $ 4' )xmn \|l xm i|( xn 26 ymn 'Ji ym ijjyn ymn (jiym \(i yn xmn ^ xm ^ xn
+D,,(a~ lv 4' 4 +b"LY *. 4' )2+K A (a"1W $' $ +V $ f )66 ymn \|fym \|) yn xmn >Ji xm \j/xn 55 55 mn wm wn xmn ^ xm ^ xn
+2K. /-A / . (a"1W $' 4 +v * * ) (b"^ * 4' +w 4 $ )45 45 mn wm wn xmn \jixm ij( xn mn wm wn ymn ijiym ^ yn
ab do-+ K / / A / / ( b ~ 1 W $ 4' +Y 4 4 )Z\44 44 mn wn wn ymn tyym tyyn •»
M N ! i
-(iii2/2) T Y f [ fm [(U $ * )2+(V $ $ )2+(W $ $ )2]L Li 3 •) L o mn um un mn vm vn v mn wm wn J
m=l n=l 0 0
+2m,[(U * # )(Y 4 4 )+(v 4 * )(* 4 4 )]1 mn um un xmn ty xm i|J xn mn vm vn ymn ty ym ly yn
79
,[(Y '4. 4. )2-(-(Y ». *. )2]} ab do- dpI xmn \jixm \jixn ymn \liym i|iyn J p
M N 11
Z V f I - (D-l)) q W * 4 ab dor dpL> J J mn wm wn
where
D2. Equations for Minimizing the Energy Difference
N
If I 6' *' A~ I * T v
un u-f/1 1 ° Om=l n=l
M
M, N 1 19L/9U. = (b /a )A } T U f *' *' dor f
k-C 11 £_, L, mn .1 um uk Jm=l n=l ° °
• \ ^ r1 r1 ,L _ / / V $ $ . do< $ $ .dB12 L L> mn J vm uk J vn uf.
, , o om=l n=l
M NM IN 1 iv v r r
+(b /a )A, . ) ) V i $' $ ' , d f y $ $ .dp16 £j Zj mn J vm uk ' vn u-f. H
, , o om=l n=l
M NM IN i iv v f r
+A,, } ) U * *', do/ $' * .dp16 Lt I, mn I "um'uk J un ul
i O On=l
- v f r1 r1+An , / ) U 4' * .dor 4 4 ' . d p16 '— i_i mn J um uk J un u-t
m=l n=l o °
+(a/b)A9 , y TV f 4 $ .da f 4' 4' dp26 L- i-> mn J vm uk J vn u-f,
m=l n=l
M NT r v r , r *,+A,, ) /' V i $ $ . da' 1 $ $ .dp
60 Li i-j mn J vm uk J vn u-f.n=l
M N
+(a/b)A,, y y U I 4 * .do I" *' * ' .dp66 L^ ' L-i mn J um uk J un u£m_l i O Om=l n=l
M N l 1
11 7 7 f f $' $ ' d a f $. $ .dp11 L: L> xmn J toon uk J 'Jrxn u-o
1 1 ° °m=l n=l
80
M Nv v r r ,j y / Y 1 $ 9 d o / 1 $ $ d
12 L. £_. ymn J ijiym uk J ijiyn u{.m=l n=l
1+(b/a)B., } Y Y i $! ty'.da | $ $ ,dfi16 L*. L-. ymn j uiym uk J iliyn u-f-m = l . o o ™n=l
M Nv v r r+Bit / / Y $ $ , da $' * ,dBID Z_j i_i xmn J \(ixm uk J \(ixn u-C
m=l n=l ° °
M N i iT V f P+B / ) Y $' $ da $ f' d 6
16 LJ L. xmn J \l|xm uk J ibxn u-f.m=l n=l
M N 1
+(a/b)B9 , y y Y f $. f ,c2o i_t LJ ymn J ^iym uk
1 1 ° " °m=l n=l
M NV V P , i. P+B,, / ) Y $ * da i 9 * dp
66 ^ £j ymn J i|;ym uk J \j,-yn u-t-m=l n=l
M N , ,v v r r1
+(a/b)B,, ) } Y $, * ,da » '• * ' d p66 /_, /..- xmn J ijixm uk J \)jxn u-f,
m=l n=l
M N2 r- r-. p1 p1
-ab u, ) ) m U # * . da * * .dpLl, o mn J urn uk J un -uf
m=l n=l
2 M * rl ri-ab u/ / i m v . $ $ da i 9 9 d8 = 0 (D-2)
L, L> 1 xmn . "'J«m uk J itocn u/.. . o f o Y
m=l n=l
There is another equation, for 5L/5V .=0, which is analogous to eq. (D-2)
with the following substitutions:
u**v , U4-»V, x-»y, 1«*2, $*-*•*', a4* b. (D-3)
81
Nv(b / a )K A Y Yw f $' $ ' d o < f $ $, dB
5-> JJ *-• <L mn J wm wk J wn w-f- H
m=l n=l ° °
M~~ ^ r1 r1
' 4. 4'. da 4. 4 $ .dpxmn J wxtn wk J then wxn w-f,m=l n=l ° °
ft A .1 -I) ) ¥ 4 , 4 ' , da 4.L^ L* xmn J pctn wk J i|i=l n=l C
M N 1 i
+K A Y Yw f 4' 4 ,da f 4 S ' . d B45 {,*. L> L, mn J wm wk J wn wt-* i , o om=l n=l
M N 1 1+K,,A. Y Yw [4 4 ' , d a f 4' 4 ,d645 45 L L mn J wm wk J wn wt v
m=l n-l ° °
M N i i
) Y f ) 4. 4 .da f $. 4 ' . c/L £_ xmn J u[xm wk J wxn w-f,1 1 O O *m=l n=l
M N l 1
+b K,, .A, Y Yv [4. 4 ' . da f 443 45 L. L. ymn J tyym wk J J. ,ymn J \|iym wk J \[iynm=l n=l ° °
" " 1 1+ ( a / b ) K / / A / . } Yw f 4 4 ,d» | 41
44 44 L L mn J wm wk J v1 1 ° °m=l n=l
M N 1 1+aK, ,A , y Yf f 4. 4 ,da f f. «' dp
44 44 L, L ymn J \|iym wk j ipyn w-f,1 * O «n=l
M N i i
-ab a-2 Y Y m W f 4 4 .da f 4 4 .dBL. LJ o mn J _ wm wk J _ wn we
n=l
M Nr." . r1.
(D-4)
M N 1 1
I I J $wk
d" Jm=l n=l
M NP1 P1
,<*P
M N 1 1$,, Y Y U f 4' 4' da f <11 L> L, mn J um ibxk Jum \||xk J un
m=l n=l u °
82
& N
) VL V
+B, \ ^' -112 L ±:-!•-*»*>! *' *n=1 o vn
M
f f v r1
16 ^1 *- mn J *' »;ri
o j $ «m=i n=i o - T—V JQ vn
M N
*1 n=l
f fv T1^26 L> L\n J $
vm^xm=l n=1 o vm fx
M N+B > V f1 1
'-' ^ mn J vm^tej.dQ'= vm Xk
.1f
J
n=l
66 A ^,-".*-ltafc* ff..:,:
M ^fn Z >f r1^ -i
m=, _^ Xmn -„**»p
m=1 n Xm" -
"
M N+(b/a>6.6 7 Tt fV ,. „ r'
^ n. W" J
0*»^f|«* J
+6 T V\ f1 r
^ c, xmn J **xmWdor Im=l = o **m fxk J— ^ xmn .j temTfrxk^ *, *' dftm=l n=1 o ^m vxk J^ ifrxn ^ °
? #
^ «i=1 n=l o
83
M N 1 1+(a/b)D,, y y? f $, $, .da \ *'. *'. .dp
26 <L i-i ymn J tyym \jixk J tyyn tyx*.m=l n=l
M N ! L
+6AA Y 7 v f $1 *, ,d<* f *, $! ,dPoo Z_, /_, ymn J \|iym ijix-f. J \|iyn lyxtm=l n=l
M N i j
+(a/b)D,, V Vur f 4 f, d« f »! $' .dp66 L. L xmn J tarn \bck J ten \lix-t0 T Y 0 Y
m=l n=l
M N j !
c C A C c y Yw f $' $. ,da f | * .dp55 55 L /L mn J wm \|ixk J wn \(rxtm=l n=l ° °
PA ("•+ab K^Ar r ) ) Y *. *. ,da $, * .dp
55 55 ZL £j xmn J tyxm \Jixk J i|ixn \jpc-tm=l n=l
M. N 1 1+a K, CA. c Y / W I $ *, ,d<y | $' $, ,dB
45 45 ^ L mn J wm 'jixk J wn Ax-t H
1 1 ° °m=l n=l
^ A ,1 .1
+3b K45^5 m=l n=l
M N ! 1
-ab uo / ) m.U $ $. .do/ $ $, .dpZ^ Z-. 1 mn J urn wxk J un ta-t, p
, , o o Y
m=l n=lM N T !
. 2 m ^ $ , * , i d o ^ , * , , d p = 0 (D-5)-ab uu L L 2 xmn J \|ixm \jixk .1 i|ixn i^x', K
m= 1 n= 1
There is an analogous expression for SL/W k>=0. using the trans-
formations (D-3) , plus the following additional one:
45** 55 (D-6)
84
APPENDIX E
DERIVATION OF THICKNESS-SHEAR FACTOR FOR THE THREE-LAYER,
SYMMETRICALLY LAMINATED CASE USING THE DYNAMIC APPROACH
El. Dynamic Elasticity Analysis of an Individual Layer
Undergoing Pure Thickness-Shear Motion
For an individual layer undergoing pure thickness-shear motion
in the xz plane, the only non-zero strain component is e • Now itX Z
is assumed that the layer is orthotropic, so that the only non-zero
stress component is o , given by equation (49). Then the generalx z
stress equations of motion for three-dimensional, dynamic elastic
theory reduce to the following two equations:
o = pu. . ; o = pw,.. (E-l)xz,z K tt xz,x tt
The longitudinal thickness-shear strain can be calculated from
the displacements (u,w) in the x,z directions, respectively, as follows:
exz=U'z+W'x
The following displacement equations of motion are obtained by
substituting equations (49) and (B-2) into equations (E-l):
cs(u*zz + "•*«> = U'tt ; Cs(u'xz + w'xx) = w'tt (E'3)
85
where c Is the shear wave-propagation velocity defined by:s
=C55/p (E-4)
However, for pure longitudinal thickness-shear motion, the dis-
placements are independent of axial position x. Thus, all derivatives
of displacements with respect to x vanish and equations (E-3) reduce
to the following single expression:
cs u'zz = u>tt
Equation (E-5) is the familiar, one-dimensional wave equation,
which is solved easily by the separation-of-variables method, with the
following solution for simple harmonic motion:
u(z,t) = (A cos Q z+B sin 0 z)(C cos At + C« sin u>t) (E-6)S 8 L £
where Q s uu/c , A and B are constants depending upon the boundaryS S
conditions, and C. and C2 are constants which depend upon the initial
conditions.
E2. Dynamic Elasticity Analysis for Three-Layer,
Symmetrically Laminated Case
Here we consider the special case of a three-layer, symmetrically
laminated member, in which the two identical outer layers are designated
by superscript 1 and the middle layer is denoted by superscript 2, as
86
shown in figure E-l. The proper boundary conditions for the anti-
symmetric modes in pure thickness-shear motion are
(z2,t) = u(2) (z2,t) ; u. 0 ;
u,z(2)(z2,t) ; u
(2) (0,t) =0
(E-7)
where z1 and z_ are dimensions shown in figure E-l.
Substituting equation (E-6) into equations (E-7) yields the follow-
ing set of expressions:
cos + B sin cos
+ B0 sin fl z. ; - 0 A, sin 0 z_ 4- 0 B, cos2 s 2 s 1 s 2 s 1
V ' A «:-in (V~' •* 4- O v~' R ro«i O x ~ ' z • -O V * 'A < ? i n »-)x"' ?4 o ^ a l l l H Z~ * \ t O ^ C U o ^ i ^— > — \ l n o i n i cs 2 s 2 s 2 s 2 s 1 s 1
B. cos n z. = 0 ; A_ = 0S 1 S 1 i
(E-8)
or
cos s
sin
sin 0(1)z,S fc
.s i
8 lna< 2>, 2 -
)s(2)cos n^2 )z2
0 _
/ \Al• B l
J
» = 1
0
0
0V /
(E-9)
The homogeneous system of linear algebraic equations (E-9) has a
nontrivial solution if, and only if, the determinant of its coefficient
87
matrix is equal to zero. The resulting determinants1 equation has as
its solutions the roots of the following transcendental equation:
0(1) tan nf z, - - n<2> cot CO z, - n «.) (E-10)S S £ S S £ S L
(k) (k)From the definitions of Q and c , we have
S
where
P — P^ ' /P^ ' . P = rA ' /r,' ' ft} 1O\- ^55 '^55 > K P 'P V.i-l^;
Then equation (E-10) can be expressed as follows:
tan ( C n z O / R ) = cot
where
E3. Dynamic Analysis of a Symmetrically Laminated Timoshenko
Beam Undergoing Pure Thickness-Shear Motion
*Here we consider a symmetrically laminated Timoshenko beam . The
*A beam exhibiting both thickness-shear flexibility and rotatory
inertia is generally referred to as a Timoshenko beam (refs. 41,42).
88
axial and thickness (or depth) directions are designated as the x and z
axes, respectively. Such a beam could be analyzed as a special case of
the laminated plate theory presented in Section II by merely deleting
all derivatives with respect to y. However, the beam case is so much
simpler and pure thickness-shear motion is such a simple type of motion;
therefore, it was decided to make an exact analysis for the present case.
The following kinematic relations hold throughout the entire
thickness of the laminate:
K =ilf 5 e =w +\li (E-15)XX *X,X XZ 0,X *X
The following stress-strain relations are applicable to a typical
layer "k":
l H z ; a =xx 11 xx 11 xx xz 55 xz
The bending moment and shear force, expressed on the basis of a unit
width as in plate theory (Section 2.3) are:
n
oz dz ; QJ xx
n kM = o(k)z dz ; Q =Y | ok) dzL. Jxx
k=l Vl k=l Zk-l
Substituting equations (E-15) and (E-16) into equation (E-17) and
introducing the shear factor K,c as a correction factor to be determined
later, one obtains:
Mxx = Dll*x,x ;
39
where
zkk=i Vi
The equations of motion for a symmetrically laminated Timoshenko
beam are identical in form to those governing a homogeneous Timoshenko
beam (refs. 41,42), namely:
Q = m w ;M -Q= m.* (E-20)x,x o o,tt xx, x x 2Yx,tt
where m and ou are defined in equations (28) .
Inserting equations (E-18) into equation (E-20) , one obtains the
following set of two coupled equations of motion in terms of the generalized
displacements w and \li :
K55A55 (w0,xx+*x,x> =moW
0,tt
*x.tt
For pure thickness-shear motion, w and \|i are independent of axialo x
position x, so that equations (E-21) and (E-22) uncouple and become:
Wo,tt =°
m 2 * x , t t + K 5 5 A 5 5 * x
Since equation (E-23) does not contain K,.,. and since w is not
90
in equation (E-24), we have no further need for equation (E-23).
For steady-state harmonic motion, the solution of equation (E-24)
can be expressed as follows:
s1"* (E-25)
where ^is a constant.
Substituting equation (E-25) into equation (E-24), we are led to
the following relationship:
a.2 = K A/m (E-26)
This equation is applicable to any symmetrical laminate. For the special
case of a three-layer one, using the notation depicted in figure 10 and
the definitions of A,., and m- from equations (E-19) and (28), one obtains:
u>2 = 3K55 z~2 (C )/p(1))[(C2/P) + 1-C2]
(E-27)
' [(G2/R) + 1 - Cj I"1
where g,R, and £2 are as defined previously.
E4. Determinations of the Thickness-Shear Factor
The longitudinal thickness-shear factor, K , is determined implicitly
2by equating u/ associated with the lowest non-trivial solution of equation
(E-13) to that given by equation (E-27).
91
APPENDIX F
COMPLEX STIFFNESS COEFFICIENTS FOR A LAMINATE HAVING
ALTERNATING PLIES OF TWO DIFFERENT COMPOSITE MATERIALS*
Fl. Introduction
The theory presented in Section II can be used to calculate the
stiffness and damping coefficients for an arbitrary laminate, i.e. one
consisting of any number of plies of any thickness, material, and orienta-
tion. However, in many cases of practical importance, laminates are de-
signed to have many plies of two alternating materials. In such cases,
the approximate approach used in refs. 29-31 is sufficiently accurate.
Although this approach was originated for application to wave propagation in
an infinite medium, it is applicable also to plates. In the latter con-
figuration, it has been verified experimentally in several instances. By
comparison with static experimental results, Rose and Tshirschnitz (refer-
ence 92 ) found that it gave good predictions of the in-plane elastic
modulus and in-plane shear modulus. Also Achenbach and Zerbe (ref. 32)
found that it gave a frequency versus wavelength relationship for longi-
tudinal vibration of a laminated beam which was in excellent agreement
with experimental results.
In all of the work mentioned above, all of the individual layers were
isotropic. However, in many cases of increasing importance, at least one
of the sets of layers may be made of composite materials. Some examples
*After completion of this derivation, the work of Chou et al.. (Referencecame to the attention of the authors. In their work, Chou et al. derived.purely elastic equations which are analogous to the complex ones derived here,
92
are as follows:
1. Alternating layers of an isotropic material and an orthotropic
material. Examples: armor plate consisting of alternating layers of a
hard ceramic material (isotropic) and a lossy glass fiber-epoxy matrix
composite (orthotropic); a laminate consisting of alternate layers of high-
modulus orthotropic composite material (such as boron-epoxy or graphite-
epoxy) and low-modulus, high-damping polymer (to increase the damping cap-
acity of the laminate).
2. Alternating layers of two different orthotropic composite materials,
Example: Boron-epoxy (for high stiffness) and glass-epoxy (for low cost).
The lamination scheme may be either parallel ply (unidirectional) or cross
ply.
3. Alternating layers of the same composite material and thickness,
but oriented alternately at 4« and -9, where 0 < 9 < 90°. This is the so-
called angle-ply lamination arrangement, which is very popular in a variety
of aerospace structures.
An original derivation is presented here which is applicable to
determination of both the stiffness and damping of the above three classes
of laminates. It may be considered to be a generalization of the work of
refs. 29-31; necessarily the resulting equations reduce to theirs in the
case when both materials are isotropic.
F2. Analysis
The bases for the present analysis, as well as that of refs. 29-
31, are the following hypotheses:
1. Strains in the plane of the laminations are equal.
93
2. Stresses in the direction normal to lamination planes are equal.
Hypothesis 1 leads to the Voigt upper-bound estimate (reference 93)
of the equivalent macroscopic properties of a two-phase material having
arbitrary geometrical configuration of individual constituents. Except
for the presence of an additional Poisson's ratio effects term, this is
known also as the "rule of mixtures". Hypothesis 2 leads to the correspond-
Reuss lower-bound estimate (reference 94), which is almost identical with
the so-called "inverse rule of mixtures".
Here we consider a medium consisting of repeating alternating
layers denoted by "a" and "b", as shown in figure F-l. The plane of
the laminations is designated as the xy plane and z is the normal to this
plane. Then the two hypotheses mentioned above can be stated mathematically
as follows in contracted notation:
e(3) = e(b> = 6 0=1,2,6) (F-l)
o.(a) = Oi(b) = a. U=3,4,5) (F-2)
where the e. are strain components, the a. are stress components, and
superscripts (a) and (b) refer to layers "a" and "b". Subscripts 1 and 2
refer to normal strain (or normal stress) in the plane of the layers, 3
refers to thickness-normal effects, 4 and 5 refer to thickness shear, and
6 refers to in-plane shear. This notation is consistent with that most
widely used in the field of composite-material mechanics (ref. 4) but
differs from the mixed notation used in the body of this report.
As a consequence of the complex, orthotropic version of Hooke's law
94
and static equilibrium, equations (F-l) and (F-2) imply the following re-
lations :
O. = H(a>o.(aWb)0.(b)J J J
1,2,6) (F-3)
(1-3.4.5) (F-4)
where H and H are the thickness fractions of layers "a" and "b",
respectively. Thus,
(F-5)
The complex, orthotropic version of Hooke's law, alluded to above,
holds for each type of layer as follows:
,<»"a"'
°3
"4
°C5
o\ X
>• =
p(k) =(k) s(k) n n = (k)~Cll °12 C13 ° ° C16
g(k) g(k) =(k) -(k)L12 22 °23 U U C26
-(k) =(k) =(k) n = (k)C13 L23 L33 ° ° C36
o o o c.(k) c.(k) o44 45
o o o cfk) c^k) o^»5 55
s(k) =(k) =(k) =(k)L16 26 ^36 °66
^
el
62
e3
e(k)64
(k)e c5
66
(k=a,b)
(F-6)
-(k)where the C.. are the complex stiffness coefficients.
95
f \al°2
°3
(T
3 .
=
\ >
c ' r ' r ' r ' ' r '11 °12 C13 C13 C16
C1 r ' r ' r ' ' r*°12 C22 °23 C23 C26
C(a) C(a) C(a) 0 r(a)°13 C23 C33 ° C36
c(b) c(b> o c(b) c(b)13 ^23 U L33 °36
•<
r \el
e2
(a) se3
(b)e3
, 66 ,
where
(a)
C!, = H(a) C'
; i,j = 11, 12, 16, 22, 26
• - H(b)r (b>-
j ~ " °ij ;
= 13, 23
13, 23
(F-7)
Combining equations (F-4) and the last two of equations (F-7), we
get the following relations:
e(a)= rc(b) , - H(b)fc(a) -e3 LL33 e3 (L13 13 23 " 23 e2
(b) . ,(a)
(F-8)
-H^CCJ^-C^).,! [H(a>C<b) +H(b> C 33
Substituting equations (F-8) and (F-9) into the first of equations
(F-7), one is led to the following result:
(F-10)
96

where
= H(a)g(a) (b)-(b) £ , = (a) 5(b)- " Cll + H Cll KC (C13 ' C13
- ,
13 S
- _ (a) -(a) . H(b)-(b) - -(a) ?(b) -(a) =(b)C16 = " C16 + " C16 ' Kc(C13 " C13 )(C36 ' °36
Kc
Analogous equations to equations (F-10) - (F-14) can be obtained
readily by interchanging the roles of subscripts 1 and 2.
From the last two of equations (F-7), one gets:
+ (C(a) + C(b))e + C(a) (a) + C(b)
Then substituting equations (F-8) and (F-9) into equation (F-17), one
finds the following result:
°3 = 513 el + S3 62 + 533 £3 + 536e6 (F
where C1_ and C__ are given by equation (F-13) and an analogous equation
and
97
36 (F-20)
Still another set of equations analogous to equations (F-10)-(F-14)
can be obtained by interchanging the roles of subscripts 1 and 6.
As the first step toward determining expressions involving the com-
posite coefficients with subscripts 44, 45, and 55, it is expedient to in-
vert the pertinent equations in set (F-6) , thus arriving at the following
expressions:
(F-21)
f 1
e4
Uk>j> =
" ~Q \ ^/ 0 V *^/S44 S45
r» \ "/ o x "/
_S45 S55 _
•«
f \
°4
°5
where
44
55
55
- C°
(k)
. -(k)' S45
r(k) _ :(k) =(k) x«A - C44 C55 " (C45
(F-22)
Inserting equations (F-21) into equations (F-4), we arrive at the
following expressions:
(F-23)hi.I-.}"\ '
S44 S45
§45 §55—
•h\
1^1V. /
where
AA44 44 44 (F-24)
98
There are three expressions, analogous Co equation (F-24), which are
obtained by merely substituting subscripts 45 and 55, respectively,
for subscript 44 in equation (F-24).
We now have derived expressions for all twenty of the laminate
coefficients which appear in equation (F-23), above, and in the follow-
ing expression:
'11
'12
'13
'16
'12
'22
'23
'26
'13
'23
'33
'36
'16
'26
'36
66
/ \
> (F-25)
The effective density of the laminate is given by the following
expression:
D = (F-26)
99
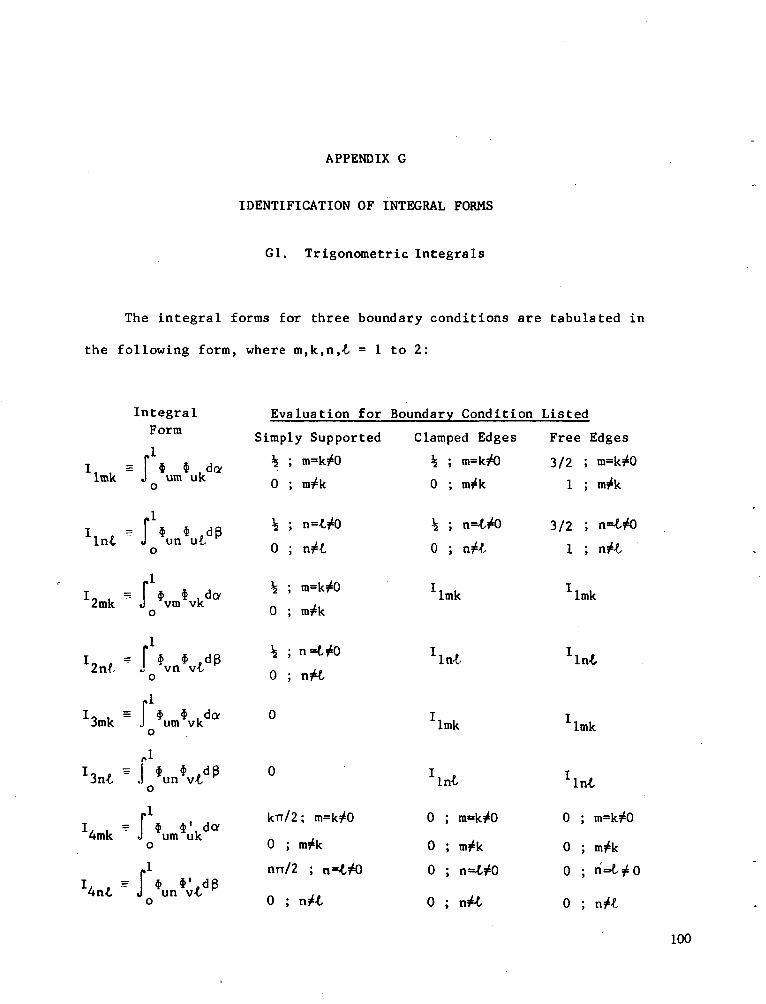
APPENDIX G
IDENTIFICATION OF INTEGRAL FORMS
Gl. Trigonometric Integrals
The integral forms for three boundary conditions are tabulated in
the following form, where m,k,n,-t. = 1 to 2:
"""Irak
hnl
X2mk
hnl
X3mk
'**
X4mk
hnl
IntegralForm
r1 .= 1 * $ dcyJ urn uk
o
= f $ $ fdpJ un ut,o
piH J «v»*vkda
o
1pJ vn v-f-
0
r1
^ J $um$vkda
0
= f * * .dp.1 un vlo
r1= $ $' dor
J urn uko
Pl= $ t ' . dpJ un vlo
Evaluation for
Simply Supported
0 ; m^k
\ ; n=^,^0
0 ; n^-t
% ; ~»0 ; m^k
0 ; nil
0
0
krr/2; m=k#)
0 ; m^k
nrr/2 ; n^-t-^0
0 ; nil
Boundary Condition
Clamped Edges
0 ; m^k
0 ; nil
Jlmk
hi
Tlmk
Zlnt
0 ; ».kW
0 ; m^k
0 ; n=tj^0
0 ; nil
Listed
Free Edgei
3/2 ; m=k=
1 ; m?*k
3/2 ; n-fc
1 ; nil
Xlmk
Xlnt
X lmk
Iln-t
0 ; m-W
0 ; m^k
0 ; n=t :
0 ; nil
100
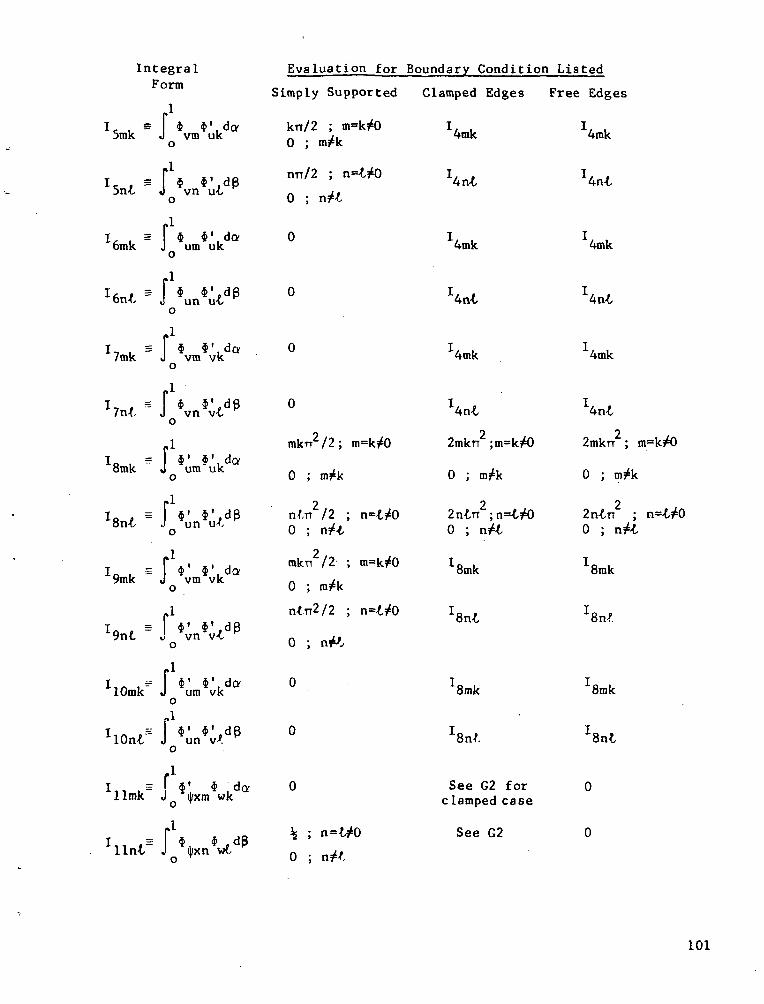
IntegralForm
T =5mk
'**•
1 =6m k
Ifin; =
T7mk =
I =
X8mk ^
W
Z9mk "
X9nt -
I10mk"
T10ntS
Illmk=:
W
1P ,
J vm uko
r $ $',dpJ vn u-to
f1* «• daJ um uko
r1§ f .dp
J un u-Co
r1*J vm vk0
p1
J vn v-Co
.1r1 $ 6 daJ um uk
o
f1*' f dJ un u-f,o
F $' J ' . daJ vm vko
P1
1 /?» t d» ' /^ QJ vn v-t
o
r1*' 4 ' .daJ um vk
o
f1 ,1 Xt 1 <!* t JOI *r T Q pJ un v-'.o
r1 -J ijrxm wk
P1
1 $ *P €1PJ ilixn w(^
0 Y
Evaluat ion for Boundary Condition Listed
Simply Supported Clamped Edges Free Edges
krr/2 ; m=k#) I. I/. 4mk 4mk0 ; mfk
nrr/2 ; n=-t#0 I, I, .
0 ; n^-f,
0 I. . I. .4mk 4mk
0 I I
0 I, , I. .4mk 4mk
0 I I
j 2 2mkn /2 ; m=k?k) 2mkn ;m=k^0 2mkn ; i
0 ; nn'k 0 ; mj'k 0 ; m?=k
2 2 2n-f,rr /2 ; n=-t^0 2n-trr ;n^L?Q 2n-trr ;0 ; n^-t 0 ; n£t 0 ; n^-C,
mkTT 12 ; m=k^0 I8mk Igmk
0 ; tn^k
n*t'TT / 2 * n^'tfi^O X *• r\on'O on i.
0 ; n^t/
0 T8mk X8mk
0 I I
0 See G2 for 0clamped case
Jj ; n=<t#) See G2 0
0 ; n#.
101
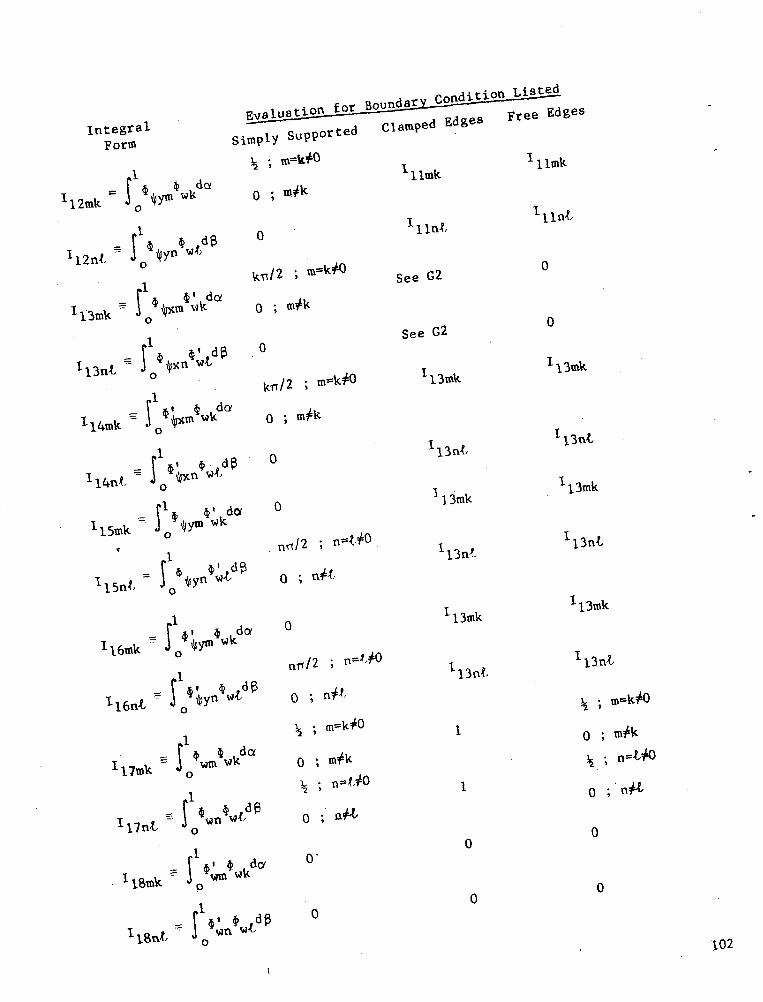
Evaluation for Boundary Condition Listed• C^/TOB Free Edges
dai!2mk - 0
r^112*1S JJ
- fI-\Amk J .
$• da13mk
O
.1kn/2 ; -*«'«
- r.s.f,
nfl/2 ;
.OOf
/
17tnk -i;- iwm wk
da
o ;
k ;
0 ;
*-Udwn
Lllmk
See G2
See G2
kl3nt
llmk
l3mk
H3mk
Il3ni
J5 ; »
0 ; n
^ ' '
o ;
o
o
102
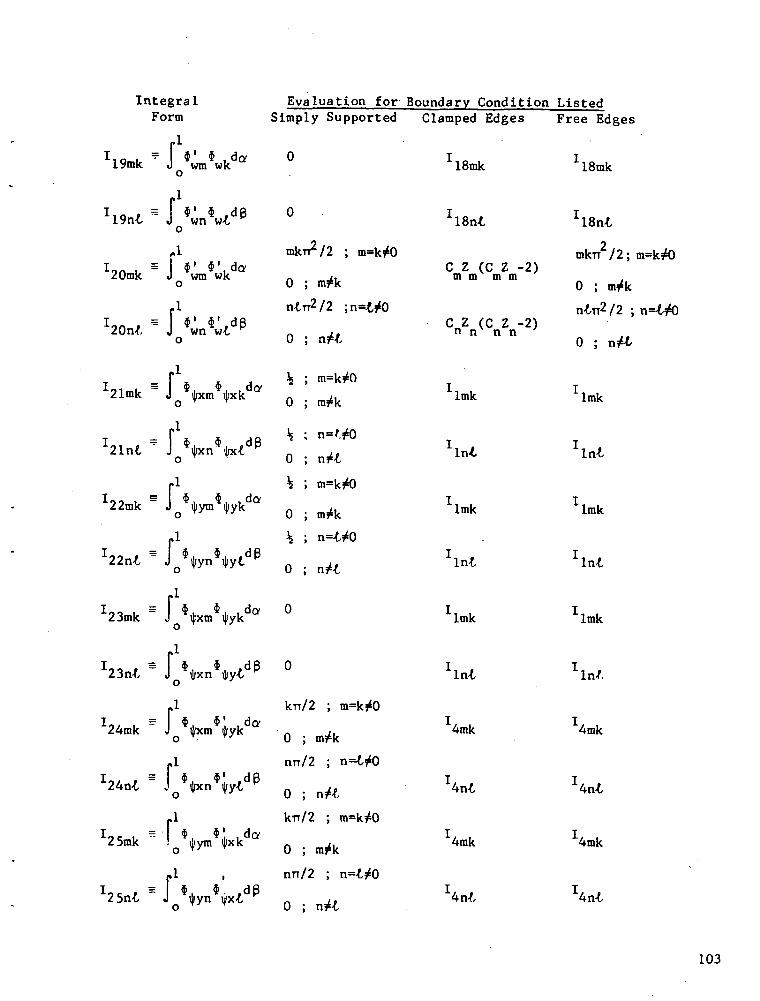
IntegralForm
r* J 'im*wkdof
19nt
r
_. . = «.' t'.da20mk J wm wk
*' $'dpwn wt
22mk
23mk
24mk
.1=~ J
25mk
Evaluation for Boundary Condition ListedSimply Supported Clamped Edges Free Edges
iSmk
n /,0 ; ntfk
0 J "^
h ; m=
kn/2 ; m=k^0
0 ; m?*k
nn/2 ; n=
kn/2 ;
Q . m
nn/2 ;
C Z (C Z -2)m m m m
C Z (C Z -2)n n^ n n ^
mkn/2;m=k#)
.0 ; m^k
lmk
lmk
103
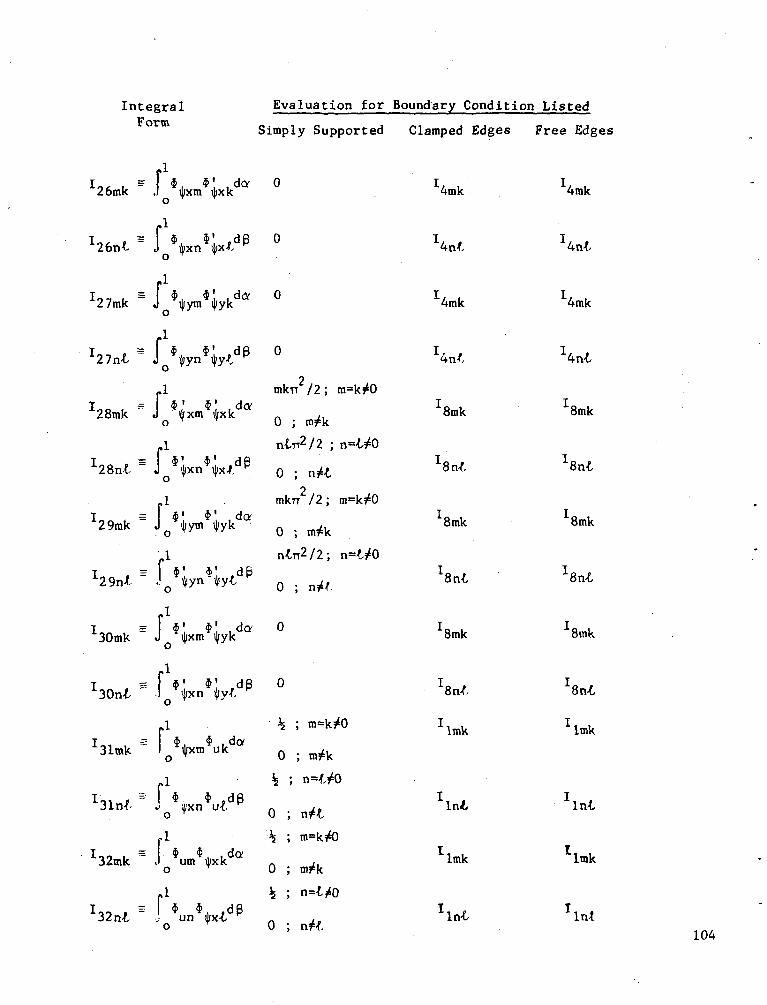
Integral Evaluation for Boundary Condition Listed
Simply Supported Clamped Edges Free Edges
Io^,. - f *^_*L.,dot 0 !,._,_• I
T = I s> s' ri ft n27nt ~ ' *•<—y-i-»ap
= f * *u.fdP
26mk ,1 >|;xm \jjxk . 4mk 4rak
1
I = I $ $ d^y 0 I L27mk J \lfym dfyk 4mk 4mk
X28mk
I28nt
T29mk
T29n*.
I30mk
X30nt
I31mk
*™.
Z32mk
2_1 mkn /2 ; m=k^0
• = | $ ' $ l d a ^ 0 1" J ilfxm \lixk n ,. omko Y ' 0 ; m^k
.1 ntrr^/2 ; n=t^0= $' $' dp Ignj
O '2
-1 . mkn /2 ; m=k^0=1 4 ' $ ' da IQ 1
JQ ij,ym ^yk Q . m^k »mk
= f $' ft' dp IQ ,-o *xn'*H o . n^. 8«<<
P 1 ( i n
~" J tyxm \(iyk 8mko
~~ J tan iliy^ 8n/-o
1 , \ ; m^kj^O I. ,
1 \lfxm uk n y.O U , uliFK
= 1 $. $ .dp I. .% *'xn ut 0 ; n^ lni
S 1 $um%xkda ft ,, Ilmk
o T 0 ; nij*k
I8mk
hnt
X8mk
l8nl
J8mk
I8n^
•""Imk
W
1lmk
un U/A-I/ _ i,° ; ^' 104
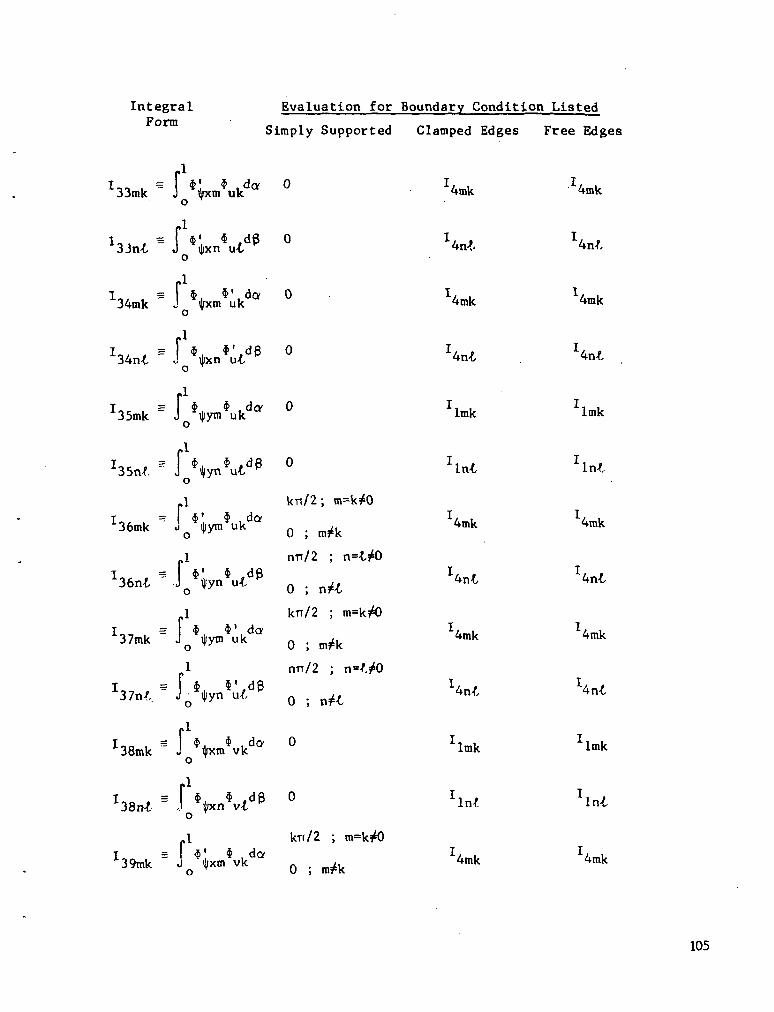
Integral
33mk
* f
34mk
r5 J
36mk
38mk
"39mk
Evaluation for Boundary Condition Listed
Simply Supported Clamped Edges Free Edges
o
,1o ^ym u
.1
kn/2 ;
k 0 ; nrf
nn/2 ;
' docuk
kn/2 ; m=k#)
nn/2 ; n=J,j
4nt
4mk
4mk
105
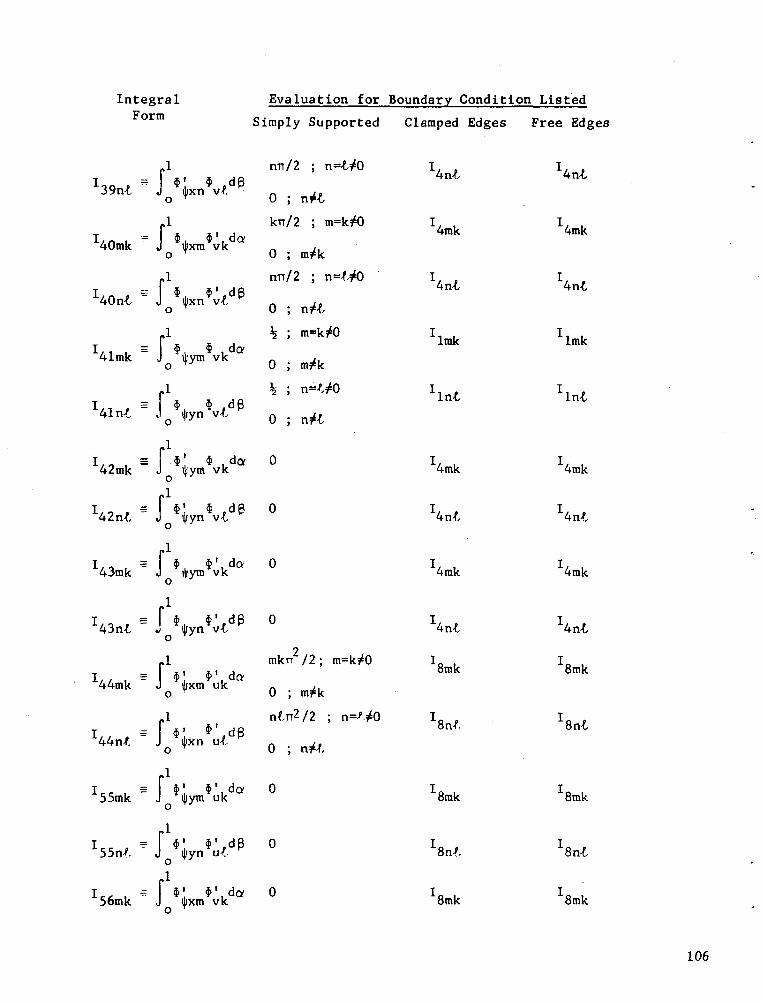
Integral Evaluation for Boundary Condition ListedForm Simply Supported Clamped Edges
39n-£,
40mk
I40n-t
i
41mk
1 41 rut
Z42mk
:43mk
I43nt
T44mk
W
I55mk
'55n,
I56mk
„! nrr/2 ; n=^0 I. ,- f *• $ dp 4n^
J ten v-f, n /,o * 0 ; ntt
rl kn/2 ; m=k#) Ir , , , j 4mk
^ 1 8 , w , OOtJ \^xm vk ,.o 0 ; m#k
.1 nrr/2 ; n=t?k) I= *, $ ' . d PJ ten v-f, . ,.
o T 0 ; n^-t-
= r1* $ da % ; m=k3t° IlmkJ \jfym vk r\ . M
o u y m*tc
" J0%yn v/, 0 . nft
r1= $' $ da 0 I.
J \kyrn vk 4mk0 Y
f1= $! $ ,dp 0 I. ,J \|(yn v-f, 4n-f,
r1= $ $' da 0 I, ,J \|iytn vk 4mk
r1
= 1 1. $ .dp 0 I.J i|(yn v-o 4n-t
- r1*- *• da mkn2/2; m=^0 lsmk= Jo**™ Uk ° 0 ; m^k
= f , $ ' d g n T T » n ~ 8nf.J ten u-t -. /.o 0 ; nf-f.
pi= $' $' dor 0 I
J \liym uk 8mko
= f $' f dp 0 IJ ij/yn u-c 8n-r.
J tern vk 8mk
Free Ed{
W
4mk
4n-[-
•"•Imk
hrA
4mk
4mk
I8tnk
W
I8mk
I8nt
I8mk
106

Integral Evaluation for Boundary Condition ListedForm
Simply Supported Clamped Edges Free Edges
s f $! $'dp 0J , 8 , ft .tyxn v-C, on*, on*,
mkTT2/2 ;
n-f,TT2/2
0 ;
.1
" J $iyn
G2 . Combination Trigonometric-Beam Type Integrals
These integrals are related to Illmk>Illnr I13mk. and I13n^ for
clamped and free edges of the plate mentioned in Appendix Gl. Therefore,
these integrals were evaluated and are listed below:
All Edges Clamped.
r1!,,,= *, $ . doJ,,, , .llmk J tyxm wk
(Zk)2 + (2nm)2\Z sinh 1. sin2mn-2mTT cosh Z, cos 2mn + 2mn\L k k k J
fcos[2mn + Zk]-l cos[2mTT -I 2[2mTi + Z. ] + 2[2mrr -
Ck f 1r < Z. cosh Z. sin 2mn - 2nm sinh Z, cos 2nm,>(Zj2
+(2mTT)2 l k k k JK
^ sinL2inTT~Z, J » x u - *.u»u • *-, j -.:k 1 2f2mTT - Z ] " 2[2mTT + Z ] J
K K
I is analogous to I,, . with the following substitutions:lint
107

m •*-»• n , k •*-»• f , a
r1
2 + ,_ .2 Zk COSh \+ (2nm)
2mn sinh Z. cos
ZL. C!k k
(Zk)2 + (2mTT)2 k
- «~ W 0 4. IU 11 I I l-i. I f\r f\ T : vTT T^
k J k I 2[2mTT - Zk] 2[2mrr + Zk]
•i Z, sinh Z, sin 2mn - 2mn cosh Z. cos 2m-rr + 2mrrfL k k k )
rcos[2nm + zkl~1 cos[2mTT - Z ]-l
Zk Ck I 2r2mTT + Z, ] + 2[2mTT - Z, ] J
I,_ . is analogous to I,_ with the fol lowing substi tut ions:1 4~' 1jmk
m-»-»-n , k «-*- / , <y
108
APPENDIX H
EVALUATION OF EXPERIMENTAL METHODS USED TO DETERMINE MATERIAL
DAMPING IN COMPOSITE MATERIALS
HI. Specimens and Experimental Techniques
The following experimental techniques and specimen types have been
used to determine material damping by experimental means (references
48, 79):
1. Decay of free vibration:
a. Torsional pendulum
*b. Axially vibrating bar (reference 95)
c. Beam*
(1) Free-free (reference 96)
(2) Cantilever (references 97, 98)
2. Resonant response:
*a. Torsional (reference 99)
b. Axial
c. Beam
(1) Free-free (references 99, 100)
*(2) Cantilever (references 101-104)
*Apparently only these methods have been applied to measurement of damping
in composite materials; each is discussed briefly in succeeding paragraphs.
109
d. Cubic block£.
e. Plate (reference 13)
*f. Shell (reference 105)
*3. Rota ting-beam deflection (reference 106)
4. Composite oscillator
5. Ultrasonic methods
6. Thermal methods
Pottinger (reference 95) measured the temporal decay of axial vibrations
of bars (Type Ib, above) of glass fiber-epoxy and boron fiber-aluminum com-
posites in the frequency range of 1 kHz to 100 kHz.
Among the earliest uses of free vibration to determine the logarithmic
decrement of a composite material were the free-free beam experiments re-
ported by Bert et al. (reference 96). The specimens were sandwich beams with
glass-epoxy facings and hexagonal-cell honeycomb cores of either aluminum or
glass-phenolic. Good correlation was obtained between the measured values
of 6 and those predicted by an energy analysis of a Timoshenko beam, which
includes thickness-shear flexibility and rotatory inertia. However, the
complexity of the analysis prevents explicit determination of the 6's of the
facings and core.
Later Schultz and Tsai (references 97, 98) used free flexural vibration
of very thin cantilever beams to determine 6 for glass-epoxy in two con-
figurations: (1) unidirectional with the fibers at an arbitrary orientation
9 with respect to the longitudinal axis of the beam, and (2) symmetrically
laminated quasi-isotropic layups (layer orientations of 0 , -60 , 60 ,
-60°, 0° and of 0°, 90°, 45°, -45°, -45°, 45°, 90°, 0°). In the 9 * 0°,
90° case, the coupling between bending and twisting significantly in-
validated the simple flexural theory used in the data reduction.
110
Adams et al. (reference 99) used torsional and flexural resonant
response to determine the damping of glass fiber-epoxy and carbon
fiber-epoxy. The magnetic-coil driver was located at the one end
of the test bar to excite torsion, Type 2a, and at the center to
excite flexure,Type 2c(l). Similar tests were conducted by Wells
et al. (reference 100) on graphite-epoxy.
Cantilever beams, Type 2c(2), were used by Keer and Lazan (reference
101), Gustafson et al. (reference 102), Mazza et al. (reference 103),
and Tauchert and Moon (reference 104). It is noted that Keer and Lazan
used sandwich-type beams with glass reinforced plastic facings and core,
and determined the resonant energy dissipated per cycle as the measure
of damping, and found it to be proportional approximately to the square
of the stress amplitude, i.e. Kimball-Lovell behavior (see Appendix B).
Clary (ref. 13) conducted resonant response tests on long free-edge
plates (Type 2e) made of unidirectional boron fiber-epoxy. He used
the modified Kennedy-Pancu method of data reduction, and studied the
effect of fiber orientation. The analytical results of the present
study are compared with his experimental results in Section 5.3.
Bert and Ray (reference 105) carried out resonant response measure-
ments on a free-edge, circular, truncated conical shell (Type 2f) with
an aluminum honeycomb core and glass fiber-epoxy facings. They used
the original Kennedy-Pancu data reduction method.
Richter (reference 106) used the rotating-beam deflection technique
(Type 3) to determine the damping characteristics of glass fiber-epoxy
at low frequency (0.01 to 1.67 Hz).
It is apparent that the most popular techniques that have been used
111

in connection with measurement of composite-material damping are the
free-vibration decay and resonant-response methods. Differences in re-
sults obtained by these two methods have been studied analytically by Parke
(reference 73), using a standard linear solid, and by Heller and Nederveen
(reference 107), using a generalized Maxwell model.
H2. Excitation and Data-Reduction Techniques for Modal Resonant
Response of Complicated Structures
The experimental and data-reduction techniques for determining damping
from free-vibration decay are rather straight forward. In contrast, a
great variety of techniques are in use for modal response at resonance,
especially in regard to data reduction.
One approach is to use multiple shakers located at various locations
on the structure and having controlled force amplitudes and phase re-
lationships. This approach was origated by Lewis and Wrisley (reference
108) and has been used and extended by Fraeijs de Veubeke (reference 109),
Asher (references 110,lll),Traill-Nash et al (references 112 ,113) , Hawkins
et al (references 114,115), and de Vries (reference 116). The major dis-
advantage of this approach is the complexity and expense, in time and cost,
of installing multiple shakers.
Another approach is to use a single excitation, even when the structure
is complicated. In conjunction with this method, there are a variety of
resonance-determination methods; these are discussed in the paragraphs which
follow. Comparative critical evaluations of a number of these methods
have been presented by Bishop and Gladwell (reference 117) , Pendered and
Bishop (reference 41) , and Pendered (reference 118) .
112
Peak-Amplitude Method. - In this simple, classical method, resonance
is defined very simply to occur when the amplitude response reaches a
peak. The major disadvantage of this method is that it is limited to
lightly damped systems without closely spaced frequencies. The reason for
this is that both of two closely-spaced-frequency modes may contribute to
the amplitude at an intermediate frequency resulting in an indication of
only one mode (a pseudo mode, of course). In an analytical study of a
typical system with two natural frequencies, closely spaced, Turner
(reference 119) showed that the peak-amplitude method results in a 1307»
error in determination of the resonant amplitude.
In general, there is no direct means of determining the modal damp-
ing, i.e. the magnitude of damping associated with various vibrational
modes. However, it can be determined from the response at the anti-
resonant frequencies, using the equations derived by Brann et al (refer-
ence 120). Also, for the special case of a base-excited system, the ratio
of the tip-to-base amplitude to the base amplitude is related to the
damping, as was shown in references 121,122.
Peak-Quadrature-Component Method. - This method was originated by
Stahle and Forlifer (reference 123) in 1958. In this method, resonance is
defined to occur when the quadrature component (90° out of phase with the
excitation) of the response peaks in either a positive or negative dir-
ection. Damping is determined from the in-phase-component peaks which
occur at a frequency below resonance and another frequency above re-
sonance. Applications of the method are discussed in references 124-126.
Quadrature-Response Method. - In this method, resonance is defined to
occur when the in-phase component of the response vanishes. The errors
associated with this method have been discussed by Pendered (ref. 118).
113
Kennedy-Pancu Method and Its Modifications. - This method was origin-
ated by Kennedy and Pancu (reference 87) in 1947. Its basis is the geo-
metry of the theoretical Argand diagram for a single-degree-of-freedom
damped system, which is a circle (see figure H-l). The data-reduction
procedure is to fair a circle through an Argand diagram obtained from
experimental data corresponding to a range of frequencies. The tacit
assumptions inherent in the method are:
1. The system is a lightly damped, linear system.
2. In the vicinity of a particular resonance, the extraneous con-
tributions from the off-resonant modes are either negligible or invariant
with respect to frequency.
3. There is no damping between the normal modes, i.e. the inertia,
damping and stiffness matrices are all diagonal.
Advantages of the method are:
1. It permits resonant frequencies, modal amplitudes, and modal
damping values all to be determined from the Argand plot.
2. It has been demonstrated on a comparative basis that the KP
(Kennedy-Pancu) has better capability in separating closely spaced re-
sonant frequencies.
In the KP method, two ways to determine the resonant frequencies are
possible. One way is to use the frequency associated with the point (on
the faired-in circle) which is most distant from the real axis. The other
way is to use the maximum frequency spacing technique, in which resonance
is defined to occur when the rate of change of the arc length (of the
Argand plot) with respect to frequency attains a local maximum.
In the original Kennedy-Pancu method, the damping ratio was determined
from the half-power points, which are two ends of the diameter (of the
114
Argand circle) which is parallel to the real axis. See equation (B-56) .
Tendered and Bishop (reference 88) introduced an improved method, based
upon the change in phase with respect to frequency, evaluated at re-
sonance. See equation (B-69).
Gladwell (reference 127) proposed a method of determining the true
response peaks and their associated damping ratios, using three points
on the frequency-response curve. However, Pendered and Bishop (ref. 88)
showed that variations of the two side-points caused changes of 1357o
in the damping coefficient of the system that they investigated.
Keller (reference 128). Smart (reference 129), and Pallett (reference
130), discussed improvements in instrumentation used in conjunction with
the KP method. In his analytical investigation of a typical two-degree-
of freedom system with closely spaced natural frequencies, Turner (ref.
119) indicated a 267, error in resonant amplitude determination, which is
a considerable improvement over the 130% error for the peak-amplitude
method. The modal-shape-determination aspects of the KP method were
discussed in reference 131.
The KP method has been applied successfully to a great variety of
vibrating systems, including:
1. Aircraft ground and flight testing (ref. 87)
2. Beam-type structures (ref. 88)
3. Two-degree-of-freedom system (ref. 120)
4. Liquid-propellant launch-vehicle axial vibration (refs. 132,133)
5. Unstiffened stringer-stiffened, and ring-stiffened sandwich cylin-
drical shells( refs. 103,130,134,135).
6. Sandwich conical shell with composite-material facings (refs. 102-104)
115
7. Composite-material plates (ref. 13).
The last three categories listed above are particularly useful ap-
plications of the mode-separating capability of the KP method, since they
often have numerous closely spaced natural frequencies. Pendered and Bishop
(reference 136) used the KP method in connection with determination of the
dynamic characteristics of a sub-system from resonance test results on
a complete system consisting of two sub-systems.
f
Woodcock (reference137) extended the KP method by providing for any
arbitrary amount of damping of the classical viscous type and by
making no assumptions about the form of the damping, stiffness, and in-
ertia matrices. However, as pointed out by Nissim (reference 138), it
is necessary that the inertia matrix be known a .priori in order to deter-
mine experimentally the complete dynamic description of the system. (It
is noted here that the inertia matrix could be determined experimentally,
at the cost of additional tests, by the displaced-frequency method, refer-
ence 139) . Nissim went on to present a set of data-reduction equations
with which the disadvantages of ref. 138 are eliminated. It should be
pointed out that apparently no actual applications of the methods of
refs. 137 and 138 have been documented so far.
H3. New Equations for Applying Two Different Versions of the Kennedy-
Pancu Method to Two More Realistic Classes of Solids
From linear vibration theory, it is well known that the largest value
of the damping ratio £ for which free vibrations can occur is £=£ =1;
at higher values of f,, the motion is nonperiodic. For a standard linear
solid, Zener (reference 140) showed that the critical loss tangent is 53 ,
which corresponds to approximately 1.183 for g . (This compares with a
116

value of 2.00 for g of a Kelvin-Volgt or Kimball-Lovell solid, since
equation (B-65) is assumed to hold for such materials). Parks (ref.
73 showed the error resulting from the use of equation (B-75) for a
standard linear solid.
As mentioned previously in the preceding section, in applying
the Kennedy-Pancu method, it is tacitly assumed that the inertia, damping
and stiffness matrices are all diagonal. Although this assumption may be
satisfied in the case of a simple structure made of one material, it is
certainly not justified in the case of a laminated composite-material
structure. However, if the damping is sufficiently small that it does
not affect the modal shapes (although, of course, it affects the modal
amplitudes) and the intermodal damping coupling is negligible, then the
KP method should still be sufficiently accurate to justify its use
for engineering purposes.
It was mentioned in Section B3 that, in order for two half-power
points to exist for a Kimball-Lovell material, the damping ratio £
must be less than/"2/2. However, when the damping is greater than this
value, one half-power point (denoted as uu) still exists. Thus, the
method can be modified to accommodate this by using equation (B-55) re-
written as follows:
C = (1/2) [(uu /uu )2 - 1 ] ' (H-l)L n
Just as the modification of the original KP method as described above,
equation (H-l), permits its use regardless of the amount of damping, other
appropriate equations can be derived to extend the use of the method to
linear systems composed of materials represented by other damping models.
117
Here we present original equations for two cases: the standard linear
solid (or first-degree hereditary mode 1) and the Biot model. Since
these models contain two parameters rather than one as in the cases of
viscous and Kimball-Lovell damping, more experimental data will be
necessary, of course.
Standard Linear Solid (or First-Degree Hereditary Model). -
Volterra (ref. 83) presented an analysis of the sinusoidally forced
vibration of a single-degree-of-freedom system exhibiting first-de-
gree hereditary damping, which is equivalent to a standard linear
solid. The equation of motion can be written in the present notation
as follows:
•£
mu + ku + h I e 1 [ d u ( T ) / d f ] d T = F sin out (H-2)J o
or
mil 4o/ tnii + (k+h)ii +0. ku = F (uu cos ULit + c^sin uut) (H-3)
The steady-state-response solution of equation (H-3) is of the
form:
u = u sin (ait - en) (H-4)o r
where
u H (F An) {[a2 u;2- (a2. -H2-^2-^]*+[(*/aT)2 |1/2
o o L n l n i J
f 2 2 2 2 2 2 2 2 2 1 - 1' \a, (it - uu ) + audir-aT-HV \ (H-5)L i n n J
f U2 r 2 2 . 2 2 2. 2 4,-l \cp= arctan ^^H oj [^ ^n - (a^H -oi^uo -uu J | .
118
2 2H = h/m , ou 3= k/ro
n
Equation (H-5) can be written in dimensionless form as follows:
[ - ? ? 2 2 2 - 2 2 " ! - ]« (i - a ) + rrco-i-irr ) fe-7)
where
a H Qf /u, , H = H/UJ .I n n
At resonance defined by U) =* ua (0=1), the resonant magnification
factor is:
-- 2 1/2 -1KMF-[l+(aH) I1' /IT (H-8)
At the half-power points
HPMF » RMF//2 (H-9)
(
Combining equations (H-7, H-8, H-9), we obtain the following
result:
where
K ? [l+(a H )2] (2 H6)"1
119

2Unfortunately, equation (H-10) is quartic in H. and thus is very
unwieldy for practical use.
To develop equations for the Tendered improvement of the KP method
for a standard linear solid, we diffrentiate equation (H-6) with re-
spect to time, obtaining the following result:
O O f O O O O O 0 / 1 O / O ^ 1
dcp/duu = a1 h uu | [a uu - (a -h -uu )uu -uu ] + a b (JJ [ (H-ll)
At resonance defined by OJ=(U and denoted by subscript R, we can
simplify equation (H-ll) as follows:
(dcp/dou)D = f [1 + (uu /a)2](u I"1
K L n n j
or
a = uu I [uu (dcp/duu) ] - 1 [n l» n R ;-1/2
(H-12)
It is interesting to note that at resonance, the parameter h drops
out, so that 01 can be determined directly from equation (H-12). To
determine h, it is necessary to measure dcp/duu at some other frequency
(say uu1) and then use equation (H-ll), with a known from equation (H-12).
The second frequency uu1 should not be too close to uu to avoid inaccuracy.
However, it should not be too far from oj that the MF has dropped down to
such a low value that signal-to-noise-ratio difficulties develop.
Biot Solid. - Caughey (ref. 60) presented an analysis of the sin-
usoidally forced vibration of a single-degree-of-freedom system with
Biot damping. In the present notation, the equation of motion is:
120
rc
mu + ku -g tk J Ei [-e(t-r)] (du/df) dT = J sin out (H-13)o
where g and e are parameters of the model.
The steady-state-response solution of equation (H-13) is of the
same form as equation (H-4) , where here
- .02]2+[g1arctan(.0/u)]2}^
cp s arctan (ir/2)gl fl+Cg/2) In (l/|j) - H] - (H-15)
where
, U sn n
Equation (H-14) may be rewritten in terms of the magnification
factor as follows:
C i' 2 2 91 1/7MF = |Cl+g1^n/l+(Q/u)2 -n ] + L^a rc t an (Q/u) ] j- ' (R_16)
At resonance defined by ou = ou (i.e. f) = 1), the resonant magnifi-
cation factor is:
RMF = g" [(^nl-M-2) + (arctan (H-17)
It is noted that the RMF defined in this way is not the peak MF, but it
is very close to it in practical systems. Also, t is emphasized that
the RMF is a function of both parameters, g and u. Thus, data from some
other frequency is required. At the half-power points (subscript hp)
121
defined by HPMF = RMF//2 , the following relation must hold:
)2 ]2 + [g^rctan (Oh /u) ]2 = 2/(RMF)2
(H-18)
Using the necessary experimental data, equations (H-17) and
(H-18) can be used to determine the Biot material parameters g and
U.
To derive Pendered type K? relations, we take the derivative of
equation (H-15) with respect to time, with the following result:
dcp/du {[l-02+(gl /2Kn u'9 91
+ (TT/2)^gJj
-1(H-19)
At resonance defined by 0 = 1 and denoted by subscript R, we
can simplify equation (H-19) to the following result:
(dcp/du,)D = -K. (H-20)
Since equation (H-20) contains both parameters (g and u), it is
necessary to measure dcp/du; at some other frequency (say Q1) and then
use equations (H-19) and (H-20) to solve for the two parameters.
122
APPENDIX I
DISCUSSION ON SYMMETRY OF THE ARRAY
OF CONSTITUTIVE COEFFICIENTS
In the analyses made in the body of this report, we have assumed
that the arrays of both the elastic coefficients and the damping coef-
ficients are symmetric, i.e.
In the present appendix, we discuss both classical and modern think-
ing, as well as experimental results which are pertinent to this topic
of symmetry of the constitutive-coefficient arrays. In recent years, the
validity of the symmetry hypothesis has been questioned for a wide
variety of materials such as soil, geological formations, laminated wood,
fabrics subjected to membrane loads, and certain composite materials
(references 141-144).
II. Elastic Coefficients
More than a century ago, there was considerable controversy regarding
the symmetry of the stiffness matrix (or the compliance matrix) of a
perfectly elastic material. About a century ago, the argument was supposedly
resolved by the brilliant mathematical analysis due to George Green and
123
the experimental work of Woldemar Voigt; see reference 145. Although
Green's analysis was purely mathematical, its importance to modern energy
methods of static and dynamic stress analysis was recognized by Love
(reference 146) , who stated that symmetry of the elastic coefficient array
is a necessary condition for the existence of the strain energy function.
Voigt verified that symmetry did hold, within experimental accuracy, for
the wide variety of single crystals which he investigated. Thus, this
hypothesis became well established in anisotropic elasticity theory and
it was tacitly assumed to hold for all materials.
Incidentally symmetry of the compliance matrix array requires that
the following so-called reciprocal relationship must hold among four of
the engineering elastic properties:
V., /E = v, . /E (k,-t=l,2,3; no sum) (1-1)
where the E's are Young's moduli and the v's are Poisson's ratios.
Recently Alley and Faison (ref. 143) clearly demonstrated experimentally
that equation (1-1) does not hold for fabrics subjected to biaxial load-
ings. They attributed this result to fiber friction, which is a noncon-
servative process. Table III lists some filamentary-composite-material
test values for which eq. (1-1) does not hold. The viscosity of the epoxy
matrix may have been the nonconservative process operative in the case
of the glass-epoxy and boron-epoxy composites; see Section 12 of this
Appendix. Also, the glass was in fabric form, so fabric friction could
have played a part. Furthermore, in the case of the boron-epoxy composite,
the minor Poisson's ratio is so very small that it is difficult to measure
124
with a high degree of confidence and experimental scatter effects become
highly magnified. However, none of these explanations account for the
case of graphite-graphite composite. It does not creep at the test
temperature (room temperature); the fibers were filament wound, not
in fabric form; and the minor Poisson's ratio is large enough to be
measured accurately (especially since .strain-gage transverse sensitivity
was provided for in the data reduction). Thus, so far, there has not
been a satisfactory explanation for this anomaly.
12. Viscoelastic Materials
For viscoelastic materials which are homogeneous and anisotropic
on a macroscopic basis, Rogers and Pipkin (ref. 141) claimed that there
are no thermodynamic bases which require symmetry of the array of con-
stitutive coefficients. Thus, they indicated that for such materials,
symmetry can be established by experiment only. For composite materials
having a viscoelastic (epoxy resin) matrix, some experimental data
suggest that symmetry may not hold in the case of reinforcement by
glass fibers and boron fibers (see table III). However, other experi-
mental data on a viscoelastic composite (nylon-fiber-reinforced rubber)
suggest that symmetry does hold.
In view of the lack of a definite proof regarding symmetry of a
viscoelastic material, symmetry is assumed to hold in the present in-
vestigation (see hypothesis H6, Section 2.1).
125
APPENDIX J
COMPUTER PROGRAM DOCUMENTATION
The program described in this appendix was programmed to ac-
complish the following three computations:
1. Calculate the shear factor K for laminates, using Jourawski
static shear theory.
2. Calculate the lowest eigenvalue for a simply supported laminated
plate without damping.
3. Calculate the amplitude frequency response and modified
Kennedy-Pancu frequency response and damping data for a free-
edge anisotropic plate with material damping.
Computation 1 was accomplished by using an explicit algebraic expression.
Computation 2 was performed by using IBM System/360 Scientific Subroutine
Packages NROOT and EIGEN. Computation 3 was performed by Package SMIQ.
A complete description of the variables, operations, etc. may be found in
IBM Manual 360A-CM-03X, version III, for the subroutines NROOT, EIGEN and
SMIQ.
The program was written in FORTRAN IV language as prescribed in IBM
System Reference Library Form C-28-6274-3.
The input-data deck was set up as follows.:
Computation 1 -
126

(a) Thickness of each layer (lower and upper limit)
(b) Elastic and shear moduli
Computation 2 -
(a) Plate geometryi
(b) Lamination geometry (specially orthotropic)
(c) Moduli and Poisson's ratio data for each ply
(d) Density for each ply
(e) Shear factor (as calculated in Computation 1)
Computation 3 -
(a) Young's and shear moduli for each layer
(b) Poisson's ratios for each layer
(c) Bending and twisting stiffnesses for each layer
(d) Loss tangents corresponding to moduli, Poisson's ratios, and
stiffnesses for each layer
(e) Plate geometry
(f) Lamination geometry, including angle of orientation for each
layer
(g) Density of each layer
(h) Shear factor (as calculated in Computation 1)
(i) Mode numbers of the assumed modes.
A complete listing of the computer program is presented at the end
of this report.
127
REFERENCES
1. Engler, E.E.; and Cataldo, C.E.: Design and Test of Advanced Structural
Components and Assemblies. NASA Space Shuttle Technology Conference,
vol. II, NASA TM X-2273, Apr. 1971, pp. 527-583.
2. Ashton, J.E. ; and Whitney, J.M.: Theory of Laminated Plates. Technomic
Publishing Co., Inc., 1970.
3. Ojalvo, I.U.; and Areas, N.: Approximate Analysis and Dynamic Tests for
a Thermal Protection System Panel. NASA Space Shuttle Technology
Conference, vol. Ill, NASA TMX-2274, Apr. 1971, pp. 49-93.
4. Ashton, J.E.; Halpin, J.C.; and Petit, P.H.: Primer on Composite Materials:
Analysis. Technomic Publishing Co., Inc., 1969.
5. Tsai, S.W.: Structural Behavior of Composite Materials. NASA CR-71,
July 1964.
6. Chambers, R.E.; and McGarry, F.J.: Shear Effects in Glass Fiber Re-
inforced Plastics Laminates. ASTM Bull., no. 238, May 1959, pp. 38-
41.
7. Khischenko, Yu. M. : Effect of Shear on the Modulus of Elasticity of
Specimens of Glas-Fiber Reinforced Plastics Tested in Transverse
Bending. Indust. Lab., vol. 30, no. 6, June 1964, pp. 937-939.
8. Tarnopol'skii, Yu. .; Roze, A.V.; and Polyakov, V.A.: Shear Effects
During Bending of Oriented Glass Reinforced Plastics. Polymer Mechanics,
128
vol. 1, no. 2, Mar.-Apr. 1965, pp. 31-37.
9. Yu., Y.-Y.: Simple Thickness-Shear Modes of Vibration of Infinite
Sandwich Plates. J. Appl. Mech., vol. 26, no. 4, Dec. 1959, pp.
679-681.
10. Ross, D.; Ungar, E.E.; and Kerwin, E.M., Jr.: Damping of Plate
Flexural Vibrations by Means of Viscoelastic Laminae. Structural
Damping, J.E. Ruzicka, ed., Amer. Soc. Mech. Engrs., 1959, pp.
49-87.
11. Ruzicka, J.E.; Derby, T.F.; Schubert, D.W.; and Pepi, J.S.: Damp-
ing of Structural Composites with Viscoelastic Shear-Damping
Mechanisms. NASA CR-742, Mar. 1967.
12. Derby, T.F.; and Ruzicka, J.E.: Loss Factor and Resonant Frequency
of Viscoelastic Shear-Damped Structural Composites. NASA CR-1269,
Feb. 1969.
13. Clary, R.R.: Vibration Characteristics of Unidirectional Filamentary
Composite Material Panels. Composite Materials: Testing and Design
(Second Conference), Amer. Soc. Testing & Matls., Spec. Tech. Publ.
497, 1972, pp. 1*15- 38.
14. Pister, K.S.: Flexural Vibration of Thin Laminated Plates. J. Acoust.
Soc. Amer., vol. 31, no. 2, Feb. 1959, pp. 233-234.
15. Stavsky, Y. : Thermoelastic Vibrations of Heterogeneous Membranes and
Inextensional Plates. A1AA J., vol. 1, no. 3, Mar. 1963, pp. 722-723.
129
16. Ashton, J .E. : Analysis of Anisotropic Plates. J. Composite Ma t l s . ,
vol. 3, no. 1, Jan. 1969, pp. 148-165.
17. Hikami, Y.: Transverse Vibrations of Laminated Orthotropic Plates.
Rept. No. 32, Div. of Solid Mech., Structures, & Mech. Design,
Case Western Reserve Univ., Apr. 1969.
18. Ashton, J.E.: Natural Modes of Free-Free Anisotropic Plates. Shock
& Vib. Bull., Bull. 39, Pt. 4, U.S. Dept. Defense, Apr. 1969, pp. 93-97.
19. Whitney, J.M.; and Leissa, A.W.: Analysis of Heterogeneous Anisotropic
Plates. J. Appl. Mech., vol. 36, no. 2, June 1969, pp. 261-266.
20. Whitney, J.M.; and Leissa, A.W.: Analysis of a Simply Supported
Laminated Anisotropic Rectangular Plate. AIAA J., vol. 8, no. 1,
Jan. 1970, pp. 28-33.
21. Ashton, J.E.; and Anderson, J.D.: The Natural Modes of Vibration
of Boron-Epoxy Plates. Shock & Vib. Bull., Bull. 39, Pt. 4, U.S.
Dept. Defense, Apr. 1969, pp. 81-91.
22. Bert, C.W.; and Mayberry, B.L.: Free Vibrations of Unsymmetrically
Laminated Anisotropic Plates with Clamped Edges. J. Composite
Matls., vol. 3, no. 2, Apr. 1969, pp. 282-293.
23. Ambartsumyan, S.A.: Theory of Anisotropic Plates. Technomic Publish-
ing Co., Inc. , 1970.
24. Whitney, J.M.: The Effect of Transverse Shear Deformation on the
Bending of Laminated Plates. J. Composite Matls., vol. 3, no. 3,
130
July 1969, pp. 534-547.
25. Yang, P.C.; Norris, C.H.; and Stavsky, Y.: Elastic Wave Propagation in
Heterogeneous Plates. Int. J. Solids & Struct., vol. 2, no. 4, Oct.
1966, pp. 665-684.
26. Mindlin, R.D.: Influence of Rotatory Inertia and Shear on Flexural
Motions of Isotropic, Elastic Plates. J. Appl. Mech., vol. 18, no.
1, Mar. 1951, pp. 31-38.
27. Biot, M.A.: Continuum Dynamics of Elastic Plates and Multilayered Solids
Under Initial Stress. J. Math. &Mech., vol. 12, no. 6, Nov. 1963, pp.
793-803.
28. Bolotin, V.V.: Vibration of Layered Elastic Plates. Proc. Vib. Probs.
(Pol. Acad. Sci,.) , vol. 4, no. 4, 1963, pp. 331-345.
29. Postma, G.W.: Wave Propagation in a Stratified Medium. Geophysics, vol.
20, no. 4, Oct. 1955, pp. 780-806.
30. White, J.E.; and Angona, F.A.: Elastic Wave Velocities in Laminated
Media. J. Acoust. Soc. Amer., vol. 27, no. 2, Mar. 1955, pp. 310-317.
31. Rytov, S.M.: Acoustical Properties of a Thinly Laminated Medium.
Soy. Phys.-Acoust., vol. 2, no. 1, Jan. 1956, pp. 68-80.
32. Achenbach, J.D.; and Zerbe, T.R.: Flexural Vibrations of Laminated Plate.
J. Eng. Mech. Div., Proc. ASCE, vol. 97, no. EM3, June 1971, pp. 619-628.
33. Hsu, T.M.; and Wang, J.T.: A Theory of Laminated Cylindrical Shells
Consisting of Layers of Orthotropic Laminae. AIAA J., vol. 8, no. 12,
131
Dec. 1970, pp. 2141-2146.
34. Wang, J.T.-S.: Axisymmetric Deformation Theory of Orthotropic
Layered Cylindrical Shells. Developments in Mechanics, vol. 6 (Proci
12th. Midwestern Mech. Conf., Aug. 1971), Univ. of Notre Dame Press,
1971, pp. 787-800.
35. Srinivas, S.; Joga Rao, C.V.; and Rao, A.K.: An Exact Analysis
for Vibration of Simply-Supported Homogeneous and Laminated Thick
Rectangular Plates. J. Sound & Vib. , vol. 12, no. 2, June 1970,
pp. 187-200.
36. Srinivas, S.; Joga Rao, C.V.; and Rao, A.K.: Some Results from an Exact
Analysis of Thick Laminates in Vibration and Buckling. J. Appl.
Mech., vol. 37, no. 3, Sept. 1970, pp. 868-870.
37. Srinivas, S.; and Rao, A.K.: Bending, Vibration and Buckling of
Simply Supported Thick Orthotropic Rectangular Plates and Laminates.
Int. J. Solids & Structures, vol. 6, no. 11, Nov. 1970, pp. 1463-
1481.
38. Tso, F.K.W.; Dong, S.B.; and Nelson, R.B.: Natural Vibrations of
Rectangular Laminated Orthotropic Plates. Developments in Mechanics,
vol. 6 (Proc. 12th. Midwestern Mech. Conf., Aug. 1971), Univ. of
Notre Dame Press, 1971, pp. 891-905.
39. Dong, S.B.: Behavior of Laminated Orthotropic Viscoelastic Plates.
J. Spacecraft & Rkts., vol. 4, no. 10, Oct. 1967, pp. 1385-1388.
40. Timoshenko, S.P.: History of Strength of Materials. McGraw-Hill
132
Book Co., Inc., 1953, p. 141.
41. Timoshenko, S.: On the Correction for Shear of the Differential
Equation for Transverse Vibrations of Prismatic Bars. Phil. Mag.,
ser. 6, vol. 41, 1921, pp. 744-746.
42. Timoshenko, S.: Vibration Problems in Engineering, 3rd. Ed.
D. Van Nostrand Co., Inc., 1955, p. 329.
43. Reissner, E.: The Effect of Transverse-Shear Deformation on the
Bending of Elastic Plates. J. Appl. Mech., vol. 12, no. 1, Mar.
1945, pp. A69-A77.
44. Young, E.; and Felgar, R.P., Jr.: Tables of Characteristic Functions
Representing Normal Modes of Vibration of a Beam. Bulletin No.
4913, Bureau of Engineering Research, University of Texas, Austin,
Tex., July 1, 1949.
45. Wang, J.T.: On the Solution of Plates of Composite Materials. J.
Composite Matls., vol. 3, no. 3, July 1969, pp. 590-592.
46. Bert, C.W.; and Chang, S.: In-Plane, Flexural, Twisting and Thickness-
Shear Coefficients for Stiffness and Damping of a Monolayer Filamentary
Composite. Final Report (Part I) on NASA Research Grant NGR-37-003-055,
School of Aerospace, Mechanical and Nuclear Engineering, University of
Oklahoma, Norman, Okla., Mar. 1972.
47. Ganov, E.V.: Investigation of Bending Stresses in Shingle-Laminated
Glass Reinforced Plastic. Polymer Mech., vol. 1, no. 5, Sept.-Oct.
133
1965, pp. 101-102.
48. Lazan, B.J.: Damping of Materials and Members of Structural Mechanics.
Pergamon Press, 1968.
49. Kimball, A.I..; and Lovell, D.E.: Internal Friction in Solids. Physical
Rev., ser. 2, vol. 30, 1927, pp. 948-959.
50 . Wegel, R.L.; and Walther, H.: Internal Dissipation in Solids for Small
Cyclic Strains. Physics, vol. 6, 1935, pp. 141-157.
51 . Lazan, B.J.: A Study with New Equipment of the Effects of Fatigue
Stress on the Damping Capacity and Elasticity of Mild Steel. Trans.
Am. Soc. Metals, vol. 42, 1950, pp. 499-549.
52 . Bishop, R.E.D.: The Theory of Damping Forces in Vibration Theory.
J. Roy. Aeron. Soc., vol. 59, no. 539, Nov. 1955, pp. 738-742.
53 . Soroka, W.W.: Note on the Relations Between Viscous and Structural Damping
Coefficients. J. Aeron. Sci., vol. 16, no. 7, Jul. 1949, pp. 409-
410, 448.
54. Theodorsen, T.; and Garrick, I.E.: Mechanism of Flutter - a Theoretical
and Experimental Investigation of the Flutter Problem. NACA TR
685, 1940.
55 . Scanlan, R.H.; and Rosenbaum, R. : Introduction to the Study of Air-
craft Vibration and Flutter. Macmillan, 1951; Dover, 1968.
56 . Myklestad, N.O.: The Concept of Complex Damping. J. Appl. Mech.,
vol. 19, no. 3, Sep. 1952, pp. 284-286.
134
57. Lancaster, P.: Free Vibration and Hysteretic Damping. J. Roy.
Aeron. Soc. , vol. 64, no. 592, Apr. 1960, p. 229.
58. Reid, T.J.: Free Vibration and Hysteretic Damping. J. Roy. Aeron.
Soc., vol. 60, no. 544, Apr. 1956, p. 283.
59. Milne, R.D.: A Constructive Theory of Linear Damping. Paper C.4,
Symposium on Structural Dynamics, Loughborough Univ. of Technology,
Longhborough, England, 1970.
60. Caughey, T.K.: Vibration of Dynamic Systems with Linear Hysteretic
Damping (Linear Theory). Proc. 4th. U.S. Nat. Congr. Appl. Mech.,
vol. 1, 1962, pp. 87-97.
61. Paley, R.E.A.C.; and Wiener, N.: Fourier Transforms in the Complex
Domain. Am. Math. Soc. Colloquium Publicat., vol. 19, 1934.
62. Garcia-Moliner, F.; and Thomson, R.: Linear Response Functions and
the Phenomenological Equations of Internal Friction. J. Appl.
Phys., vol. 37, no. 1, Jan. 1966, pp. 83-89.
63. Fraeijs de Veubeke, B.M. : Influence of Internal Damping on Aircraft
Resonance. AGARD Manual on Elasticity, vol. 1, chap. 3, 1960.
64. Crandall, S.H.: Dynamic Response of Systems with Structural Damping.
Air, Space, and Instruments (C.S. Draper Anniv. Vol.), S. Lees,
ed. McGraw-Hill Book Co., 1963, pp. 183-193.
65. Crandall, S.H.: The Role of Damping in Vibration Theory. J. Sound &«
Vib., vol. 11, no. 1, Jan. 1970, pp. 3-18.
135

66. Pinsker, W.: Structural Damping. J. Aeron. Sci., vol. 16, no. 11,
Nov. 1949, p. 699.
67. Scanlan, R.H.; and Mendelson, A.: Structural Damping. AIAA J. , vol.
1, no. 4, Apr. 1963, pp. 938-939.
68. Naylor, V.D.: Some Fallacies in Modern Damping. J. Sound & Vib.,
vol. 11, no. 2, Feb. 1970, pp. 278-280.
69. Scanlan, R.H.: Linear Damping Models and Causality in Vibrations.
J. Sound &Vib., vol. 13, no. 4, Dec. 1970, pp. 499-509.
70. Bishop, R.E.D.: The Behavior of Damped Linear Systems in Steady
Oscillation. Aeron. Quart., vol. 7, no. 2, May 1956, pp. 156-168.
71. Cunningham, H.J.: In Defense of Modern Damping Theory in Flutter
Analysis. J. Sound & Vib., vol. 14, no. 1, Jan. 1971, pp. 142-144.
72. Bland, D.R.: The Theory of Linear Viscoelasticity. Pergamon Press,
1960, pp. 3-4.
73. Parke, S.: Logarithmic Decrements at High Damping. Brit . J. A p p l .
Phys., vol. 17, no. 2, Feb. 1966, pp. 271-273.
74. Fliigge, W.: Viscoelasticity. Blaisdell Publishing Company, 1967,
p. 14.
75. Hobbs, G.K.: Methods of Treating Damping in Structures. AIAA Paper
71-349, presented at the AIAA/ASME 12th Structures, Structural
Dynamics and Materials Conference, Anaheim, Calif., Apr. 19-21, 1971,
136
76. Huang, T.C.; and Huang, C.C.: Free Vibrations of Viscoelastic
Timoshenko Beams. J. Appl. Mech., vol. 38, no. 2, June 1971,
pp. 515-521.
77. Granick, N. and Stern, J.E.: Material Damping of Aluminum
by a Resonance-Dwell Technique. NASA TN D-2893, Aug. 1965.
78. Granick, N.; and Stern, J.E.: Material Damping of Aluminum by
Resonance-Dwell Technique. Shock & Vib. Bull., Bull. 34, Pt. 5,
U.S. Dept. Defense, Feb. 1965, pp. 177-195.
79. Gustafson, A.J.; Mazza, L.T.; Rodgers, R.L.; and Mcllwean, E.A.:
Development of Test Methods for Measuring Damping of Fiber-
Reinforced Materials. Rept. USAAVLABS TR 70-42, U.S. Army
Aviation Materiel Laboratories, Ft. Eustis, Va., June 1970
(AD-873990).
80. Biot, M.A.: Linear Thermodynamics and the Mechanics of Solids.
Proc. 3rd. U.S. Nat. Congr. Appl. Mech., 1958, pp. 1-18.
81. Neubert, H.K.P.: A Simple Model Representing Internal Damping in
Solid Materials. Aeron. Quart., vol. 14, no. 2, May 1963, pp.
187-210.
82. Boltzmann, L.: Zur Theorie der elastische Nachwirkung. Annalen
der Physik und Chemie, suppl. 7, 1876, pp. 624-654.
83. Volterra, E.: Vibrations of Elastic Systems Having Hereditary
Characteristics. J. Appl. Mech., vol. 17, no.4, Dec. 1950, pp.
363-371.
137
84. Pisarenko, G.S.: Vibrations of Elastic Systems Taking Account of
Energy Dissipation in the Material. Kiev, 1955; Engl. transl.,
WADD TR-60-582, Wright Air Development Div., Feb. 1962 (AD-274743).
85. Rosenblueth, E.; and Herrera, I.: On a Kind of Hysteretic Damping.
J. Eng. Mech. Div., Proc. ASCE, vol. 90, no. EM4, Aug. 1964, pp.
37-48.
86. Chang, C.S.; and Bieber, R.E.: Synthesis of Structural Damping.
AIAA J., vol. 6, no. 4, Apr. 1968, pp. 718-719.
87. Kennedy, C.C.; and Pancu, C.D.P.: Use of Vectors in Vibration
Measurement and Analysis. J. Aeron. Sci., vol. 14, no. 11, Nov.
1947, pp. 603-625.
88. Pendered, J.W.; and Bishop, R.E.D.: A Critical Introduction to
Some Industrial Resonance Testing Techniques. J. Mech. Eng.
Sci., vol. 5, no. 4, Dec. 1963, pp. 345-367.
89. Kolsky, H.: Stress Waves in Solids. Oxford Univ. Press, 1953;
Dover, 1963.
90. Bishop, R.E.D.: The General Theory of "Hysteretic Damping". Aeron.
Quart., vol. 7, no. 1, Feb. 1956, pp. 60-70.
91. Meirovitch, L. : Analytical Methods in Vibrations. Macmillan, 1967, p. 40.
92. Rose, J.L.; and Tshirschnitz, R.: Static Material Constants for
a Layered Composite Material. Paper No. 1845A, Spring Meeting,
138
Soc. for Exper. Stress Anal., Salt Lake City, Utah, May 18-21, 1971.
93. Voigt, W.: Lehrbuch der Kristallphysik. B.C. Teubner, Leipzig, Germany,
1928, pp. 738-741.
94. Reuss, A.: Berechnung der Fliessgrenze von Mischkristalien auf Grund der
Plastizitatsbedingung fur Einkristalle. Zeits. f. ang. Math. u. Mech.,
vol. 9, no. 1, Feb. 1929, pp. 48-58.
95. Pottinger, M.G.: Material Damping of Glass Fiber-Epoxy and Boron Fiber-
Aluminum Composites. Rept. ARL 70-0237, Aerospace Research Lab-
oratories, Wright-Patterson Air Force Base, Ohio, Oct. 1970 (AD-721191).
96. Bert, C.W.; Wilkins, D.J., Jr.; and Crisman, W.C.: Damping in Sandwich
Beams with Shear-Flexible Cores. J. Eng. Industry, Trans. ASME,
vol. 89B, no. 4, Nov. 1967, pp. 662-670.
97. Schultz, A.B.; and Tsai, S.W.: Dynamic Moduli and Damping Ratios in Fiber-
Reinforced Composites. J. Composite Matls., vol. 2, no. 3, July 1968,
pp. 368-379.
98. Schultz, A.B.; and Tsai, S.W.: Measurements of Complex Dynamic Moduli for
Laminated Fiber-Reinforced Composites. J. Composite Matls., vol. 3, no.
3, July 1969, pp. 434-443.
99. Adams, R.D.; Fox, M.A.O.; Floord, R.J.L.; Friend, R.J.; and Hewitt, R.L.:
The Dynamic Properties of Unidirectional Carbon and Glass Fiber Re-
inforced Plastics in Torsion and Flexure. J. Composite Matls., vol. 3,
no. 4, Oct. 1969, pp. 594-603.
100. Wells, H.; Colclough, W.J.; and Goggin, P.R.: Some Mechanical Properties
139
of Carbon Fibre Composites. Proc. 24th. Ann. .Tech. & Mgt. Conf.,
Reinf. Plastics/Composites Div., Soc. Plastics Industry, Inc.,
1969, sect. 2-C.
102. Gustafson, A.J.; Mazza, L.T.; Rodgers, R.L.; and Mcllwean, E.H.:
Development of Test Methods for Measuring Damping of Fiber-Re-
inforced Materials. Rept. USAAVLABS TR 70-42, U.S. Army Aviation
Materiel Laboratories, Ft. Eustis, Va., 1970 (AD-873990).
103. Mazza, L.T.; Paxson, E.B.; and Rodgers, R.L.: Measurement of
Damping Coefficients and Dynamic Modulus of Fiber Composites. Rept.
USAAVLABS-TN-2, U.S. Army Aviation Materiel Laboratories, Ft. Eustis,
Va., 1971 (AD-869025).
104. Tauchert, T.R.; and Moon, F.C.: Propagation of Stress Waves in Fiber-
Reinforced Composite Rods. AIAA J., vol. 9, no. 8, Aug. 1971, pp.
1492-1498.
105. Bert, C.W.; and Ray, J.D.: Vibrations of Orthotropic Sandwich Conical
Shells with Free Edges. Int. J. Mech. Sci., vol. 11, no. 9, Sept.
1969, pp. 767-779.
106. Richter, H.P.H.: Photographic Method for Measuring Material Damp-
ing and Dynamic Young's Modulus at Low Frequencies Applied to
a Fiberglass Reinforced Resin Structure. Proc. 18th.Ann. Tech.
& Mgt. Conf., Reinf. Plastics Div., Soc. Plastics Industry, Inc.,
1963, sect. 4-D.
140
107. Heller, R.A.; and Nederveen, C.J.: Comparison of Complex Moduli Ob-
tained from Forced and Free Damped Oscillations. Trans. Soc. Rheology,
vol. 11, no. 1, 1967, pp. 113-123.
108. Lewis, A.C.; and Wrisley, D.L.: A System for the Excitation of Pure
Modes of Complex Structures. J. Aeron. Sci., vol. 17, no. 11, Nov.
1950, pp. 705-722.
109. Fraeijs de Veubeke, B.M.: A Variational Approach to Pure Mode Excitation
Based on Characteristic Phase Lag Theory. AGARD Rept. 39, Advisory
Group for Aeron. Res. & Dev., North Atlantic Treaty Org., Apr. 1956.
110. Asher, G.W.: A Method of Normal Mode Excitation Utilizing Admittance
Measurements. Proc. Nat. Specialists Meeting on Dynamics & Aeroelasti-
city, Ft. Worth, Tex., Nov. 6-7, 1958; Inst. of Aeron. Sci., 1959, pp.
69-76.
111. Asher, G.W.: A Note on the Effective Degrees of Freedom of a Vibrating
Structure. AIAA J., vol. 5, no. 4, Apr. 1967, pp. 822-824.
112. Traill-Nash, R.W.: On the Excitation of Pure Natural Modes in Aircraft
Resonance Testing. J. Aero/Space Sci., vol. 25, no. 12, Dec. 1958, pp.
775-778.
113. Traill-Nash, R.W.; Long, G. ; and Bailey, C.M.: Experimental Determination
of the Complete Dynamical Properties of a Two-Degree-of-Freedom Model
Having Nearly Coincident Natural Frequencies. J. Mech. Eng. Sci., vol.
9, no. 5, Dec. 1967, pp. 402-413.
114. Hawkins, F.J.: An Automatic Shake Testing Technique for Exciting the Normal
141
Modes of Vibration of Complex Structures. AIAA Sympos. on Struct.
Dynamics & Aeroelasticity, Boston, Mass., Aug. 30-Sept. 1, 1965,
pp. 452-464.
115. Hawkins, F.J.; Skingle, C.W.; and Taylor, G.A.: A Multiple-Frequency,
Shake-Testing Technique for Structures with Rapidly-Changing Dynamic
Characteristics. Shock &Vib. Bull., Bull. 35, Pt. 2, U.S. Dept.
Defense, Jan. 1966, pp. 107-116.
116. de Vries, G.: The Principles of Global Tests of a Structure. NASA
TT F-10,003, Feb. 1966.
117. Bishop, R.E.D.; and Gladwell, G.M.L.: An Investigation into the Theory
of Resonance Testing. Phil. Trans. Roy. Soc., London, ser. A, vol.
255, no. 1055, Jan. 17, 1963, pp. 241-280.
118. Pendered, J.W.: Theoretical Investigation into the Effects of Close
Natural Frequencies in Resonance Testing. J. Mech. Eng. Sci., vol.
7, no. 4, Dec. 1965, pp. 372-379.
119. Turner, L.J., Jr.: An Analytical Investigation of a Vector Technique
for Determining Normal Mode Amplitudes from Vibration Data. M.S.
Thesis, Virginia Polytech. Inst., May 1968.
120. Brann, R.P., Devney, A.J.; and Robinson, C.D.: Harmonic Excitation of
a Lightly Damped Multi-Degree System. Bull. Mech. Eng. Education, vol.
5, no. 2, 1966, pp. 95-111.
121. Rodden, W.P.; and Whittier, J.S.: Damping of Shaker-Excited Beams
Calculated Solely from Displacement-Amplitude Measurements. J.
L42
Acoust. Soc. Amer., vol. 34, no. 4, Apr. 1962, pp. 469-471.
122. Wambsganss, M.W., Jr.; Boers, B.L.; and Rosenberg, G.S.: Method for
Identifying and Evaluating Linear Damping Models in Beam Vibrations.
Shock & Vib. Bull., Bull. 36, Pt. 4, U.S. Dept. Defense, Jan. 1967,
pp. 65-74.
123. Stahle, C.V.; and Forlifer, W.R.: Ground Vibration Testing of Complex
Structures. Proc. AIA-AFOSR Flight Flutter Testing Sympos., May
1958.
124. Stahle, C.V.: A Phase Separation Technique for the Experimental
Determination of Normal Vibration Modes of Flight Vehicles. Shock
& Vib. Bull., Bull. 29, Pt. 4, U.S. Dept. Defense, 1961, pp. 30-42.
125. Stahle, C.V., Jr.: Phase Separation Technique for Ground Vibration Test-
ing. Aerospace Eng., vol. 21, no. 7, July 1962, pp. 56-57, 91-96.
126. Hutton, F.E.: The Application of the Component Analyzer in Determin-
ing Modal Patterns, Modal Frequencies, and Damping Factors of Lightly
Damped Structures. Shock & Vib. Bull., Bull. 33, Pt. 2, U.S. Dept.
Defense, Feb. 1964, pp. 264-272.
127. Gladwell, G.M.L.: A Refined Estimate for the Damping Coefficient.
J. Roy. Aeron. Soc., vol. 66, no. 614, Feb. 1962, pp. 124-125.
128. Keller, A.C.: Vector Component Techniques: A Modern Way to Measure
Modes. Sound &Vib., vol. 3, no. 3, Mar. 1969, pp. 18-26.
129. Smart, T.E.: Dynamic Phase Plotting. Shock & Vib. Bull., Bull. 37, Pt.
2, U.S. Dept. Defense, Jan. 1968, pp. 77-85.
143
130. Pallett, D.S.: System for the Complex Plane Representation of Mechan-
ical Vibration Response Parameters. Rept. TM 107.2811-06, Ord. Res.
Lab., Penn. State Univ., State College, Pa., Mar. 13, 1969.
131. Tendered, J.W.; and Bishop, R.E.D.; The Determination of Modal Shapes
in Resonance Testing. J. Mech. Eng. Sci., vol. 5, no. 4, Dec. 1965,
pp. 379-385.
132. Schoenster, J.A.; and Clary, R.R.: Experimental Investigation of the
Longitudinal Vibration of a Representative Launch Vehicle with Sim-
ulated Propellants. NASA TN D-4502, May 1968.
133. Clary, R.R.; and Turner, L.J., Jr.: Measured and Predicted Longitudi-
nal Vibrations of a Liquid Propellant Two-Stage Launch Vehicle. NASA
TN D-5943, Aug. 1970.
134. Bray, P.M.; and Egle, D.M.: An Experimental Investigation of the Vibra-
tion of Thin Cylindrical Snells with Discrete Longitudinal Stiffening.
Jour. Sound & Vib., vol. 12, no. 2, June 1970, pp. 152-164.
135. Schoenster, J.A : Measured and Calculated Vibration Properties of Ring-
Stiffened Honeycomb Cylinders. NASA TN D-6090, Jan. 1971.
136. Pendered, J.W.; and Bishop, R.E.D.: Extraction of Data for a Sub-System
from Resonance Test Results. J. Mech. Eng. Sci., vol. 5, no. 4, Dec.
1965, pp. 368-378.
137. Woodcock, D.L.: On the Interpretation of the Vector Plots of Forced
Vibrations of a Linear System with Viscous Damping. Aeron. Quart.,
144
vol. 14, no. 1, Feb. 1963, pp. 45-62.
138. Nissim, E.: On a Simplified Technique for the Determination of the
Dynamic Properties of a Linear System with Damping. J. Roy. Aeron.
Soc., vol. 71, no. 674, Feb. 1967, pp. 126-128.
139. de Vries, G.: Sondage des systemes vibrants par masses additionelles.
La Recherche Aeronautique, no. 30, Nov.-Dec. 1952, pp. 47-49.
140. Zener, C.: Mechanical Behavior of High Damping Metals. J. Appl.
Phys., vol. 18, no. 11, Nov. 1947, pp. 1022-1025.
141. Rogers, T.G.; and Pipkin, A.C.: Asymmetric Relaxation or Compliance
Matrices in Linear Viscoelasticity. Zeits. f. angew. Math. u.
Physik, vol. 14, 1963, pp. 334-343.
142. Busching, H.W.: Mechanical Behavior of Transversely Anisotropic
Materials. Proc. (First) Canadian Congr. Appl. Mech., Laval Univ.,
Quebec, Canada, May 22-26, 1967, vol. 1.
143. Alley, V.L., Jr.; and Faison, R.W.: Decelerator Fabric Constants
Required by the Generalized Form of Hooke's Law. AIAA Paper 70-1179,
presented at the AIAA 3rd. Aerodynamic Deceleration Systems Con-
ference, Wright-Patterson Air Force Base, Ohio, Sept. 14-16, 1970.
144. Bert, C.W.; and Guess, T.R.: Mechanical Behavior of Carbon-Carbon
Filamentary Composites. Composite Materials: Testing and Design
(Second Conference), Amer. Soc. Testing & Matls. Spec. Tech.
145
Publ. 497, 1972, pp. 89-106.
145. Todhunter, I.; and Pearson, K.: A History of the Theory of Elasticity
and of the Strength of Materials. Dover Publications, Inc., New
York, 1960.
146. Love, A.E.H.: A Treatise on the Mathematical Theory of Elasticity,
4th. Ed. Dover Publications, Inc., New York, 1944, chap. III.
147. Bert, C.W.; Mayberry, B.L.; and Ray, J.D.: Behavior of Fiber-Reinforced
Plastic Laminates Under Biaxial Loading. Composite Materials:
Testing and Design, Amer. Soc. Testing &Matls., Spec. Tech. Publ.
460, 1969, pp. 362-380.
148. Hadcock, R.N.: Boron-Epoxy Aircraft Structures. Handbook of Fiber-
glass and Advanced Plastics Composites, ed. by G. Lubin, Van
Nostrand Reinhold, 1969, pp. 628-660.
li>9. Chou, P.C;, Carleone, J., and Hsu, C.M.: Elastic Constants of Layered
Media. J. Composite Matls., vol. 6, no. 1, Jan. 1972, pp. 80-93.
146

H
fnMH
IXH
1 4 r~J
3 W
- §S *- S8 SO fa< ob
CO
w
ON
00
f*-
00V4Q) **O
COi-J
O
Mo) ms3Z
<t
en
CN
CM m>^> mo
O -v.
u i— i mto ^ mw uCO II3 x-vr-l CM 1-13 - r-lT> tdo2 --
^— ' I— 1w
enen00
o
enooo
enen00
o
enen00
0
enenooo
enenooo
enenCO
o
enen00
o
1— 1
vOCOr-l
o
oo00i-H
o
enON
•-Io
inON1-H
o
i-HoCN
o
enoCM
o
oo>I— 1
0
en
<->o
oi-H
CMvDoo
envOoo
\ooo
CMf .
oo
CN00oo
oooo
1 —00oo
i-H
oo
0CM
r-lenoo
CMenoo
vOenoo
enoo
r-vtoo
ino0
inoo
CMvoo0
oen
ooi-Hoo
ONr-l
oo
CMCMoo
enCMoo
r_^
en0
o
enen0
o
i-H
oo
^o0
0o-
CMi-H
0
o
enr-l
oo
i-Hi-H
oo
ini-H
oo
vOi-H
oo
CMCM0
o
CMenoo
00enoo
om
0>oo0
ONoo0
r-li-H
oo
i-Hi-H
oo
vOr-loo
r--i-H0
o
f.CMoo
CMenoo
ovO
vOooo
ooo
00ooo
ONooo
enI-H
oo
r-l
oo
enCMoo
CMoo
op
mooo
mooo
ooo
000oo
or-loo
i-Hi-H
oo
oCMoo
CMoo
o00
ooo
ooo
mooo
inoo0
00ooo
ON0oo
00i-H
oo
i-HCM0
o
oON
enooo
enooo
ooo
ooo
px.
ooo
0o0
vO1— 1oo
oCM0
o
ooi-H
147
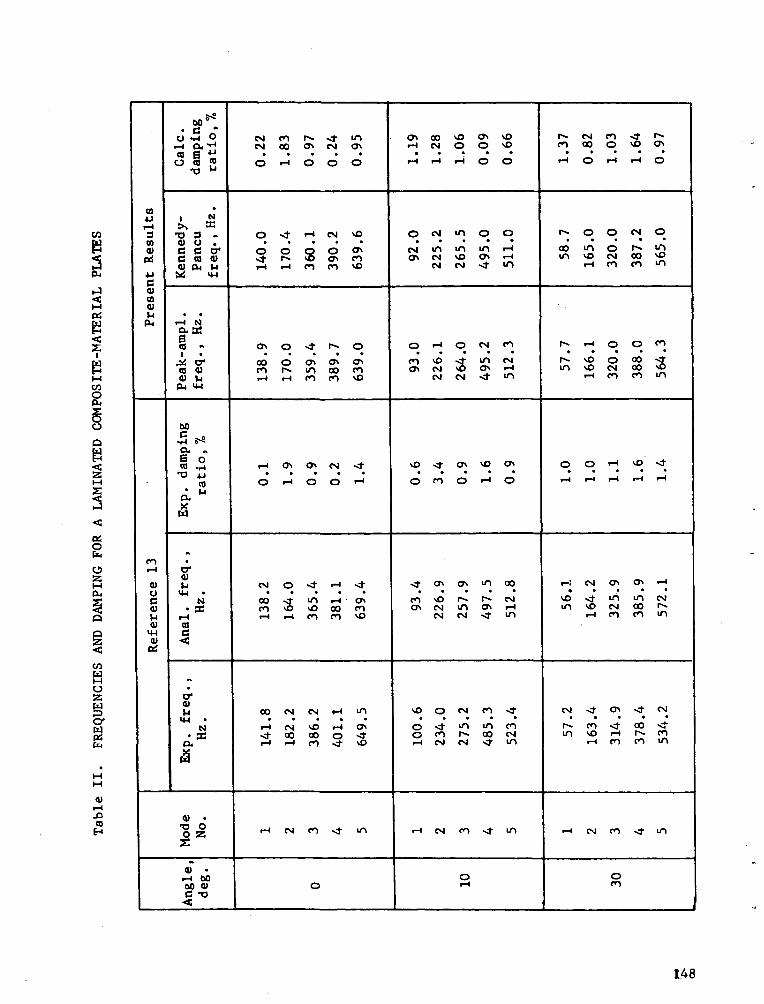
V)
B
rJ<M05
g<£
BMCO
2oQ
Bg
o
o5Pu
I
enU
oz
o-
<U
COH
m4J
3CO<ued4-1C0)O)
I-lPH
CO1-10)
Re
fere
nc
O i-l Or-i o. •"-'co S *0 -o 2
^ KT> 3 «(U U .C C crC « 4)0) PH M
r-l M
!•*CO «1 •
Ji& C7*CO 0)Q) jpL| *W
00
a. .§ °CO .,-1
coa. M
fi
cr0)
N• sc
r-lae
cr<uM
N• ECa.
0) •73 Oo z
0) .r-l 00oo a>c -o
CM co r >j- mCM OO OS CM OS
O r-l O O O
O ^ *•* CM vO
O O O O O\• r-» vO ^ POi-i i-< en co vo
O1^ O * f*** 3
00 ^ * * ^co r ^ oo or-l r-l CO CO VO
O r-l O O «-<
CM O -* r-l J-
oo * ~ in t- ' osCO vD vO 00 COr-l r-l CO CO VO
OO CM CM rH m
i— 1 CM vO r-4 OS*& CO CO O ~tr-l r-l CO -d" VO
r-l CM CO >!• m
O
^ 00 vO Os vOr-l CM O O VO
r-l r-l r-l O O
o c>> m o oCM in m m r-iOS CM VO OS rHCM CM <r m
O <-l O CM CO
co vo " in CMCM CM -* m
O CO O i-l O
co vo i » r CMos CM in os r-i
CM CM >* "
vO O CM CO >*
o * in in coo co r~ oo CMr-i CM CM <* m
i-i CM co -* m
oi— i
P^» CM CO ^ f^CO 00 O vO OS
r-l O r-l r-l O
r^ O O CM O
oo m o f^ "">m vo CM oo vor-i co co m
1^ r-4 O O CO
r^ vo o oo stm vo CM oo vor-4 co co m
r-l CM OS OS r-l
so j m in CMin vo CM oo f*r-i co co m
CM *d" Os > CM
r~- co ^ oo i?m vo i— i r^ co
r-i co co m
r-i CM co st m
oCO
1.48
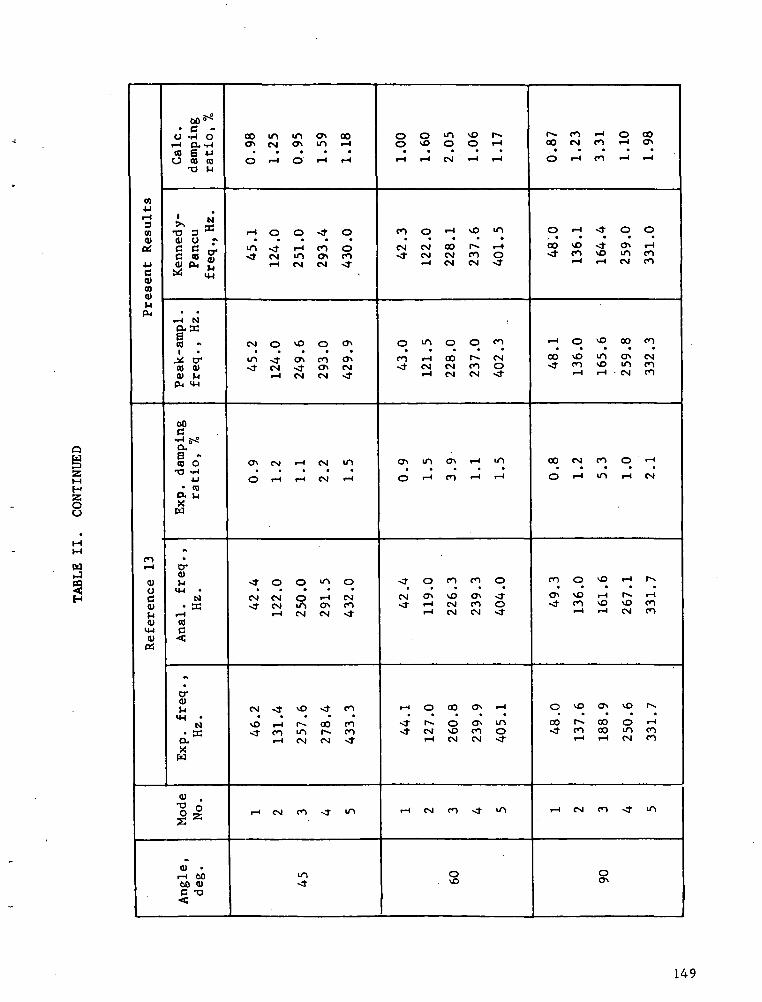
CO4J
CO<uod4-1CcuCOQ>
PL,
COr-l
<uoCi01rlCU
UHcu
. jj -O -rl OrH CL -rlCO S 4-1
O CO CO•O M
' N
•0 3 *CU O J>
S S -*"rf, -Tj
. .
r-l NtXffiaCO -1 •
j* trCO CU0) M
PL, MH
00C
Q.6^B «CO O
•O -rl4J
• CO
Xta
M
crcu14-1 •
N• 3C
1-1COe<
crt-i
X-l •N
• sdo.Xw
1^•t
CU •l-H 0000 0)C T3
oo m m ON oo
O rH O rH rH
rH O O St O
m st «-• co ost CM >n <T» co
rH CM CM St
CM o ^0 o cy>
St CM St <y> CMrH CM CM St
CT> CM rH CM m
O rH rH CM rH
st o o m oCM CM O rH CMSt CM in CTi CO
rH CM CM St
CM St VO St CO
\O rH r— 00 COst co m r-» co
rH CM CM St
i— i CM co st m
mst
O O m \o r-»O vO O O rH
I-H rH CM rH rH
co o •—' *o m(M CM 00 r i-»St CM CM CO O
i-H CM CM St
o m o o coCO rH 00 Is* CNSt CM CM CO O
rH CM CM St
ON in CTN rH in
O rH CO rH rH
St O CO CO O
CM cy> vO ON stSt rH CM CO O
rH CM CM St
rH O 00 ON i— 1
st r*- O ON mst CM vO CO O
rH CM CM St
i-H CM CO St m
O- \D
1 - CO rH O CO00 CN CO rH CT>
O rH CO rH rH
O rH St O O
OO vO st O% i— 1st co vo m co
rH rH CN CO
rH O VO OO CO
OO vO in ON CMst co vo in co
rH rH • CM CO
00 CM CO O rH
O rH in rH CM
CO O VD rH 1^
ON VO rH r rHst CO vO vO CO
rH rH CM CO
O ^O ON \O f^
00 1^ OO O rHst co oo m co
rH rH CM CO
I-H CM co st m
OON
149
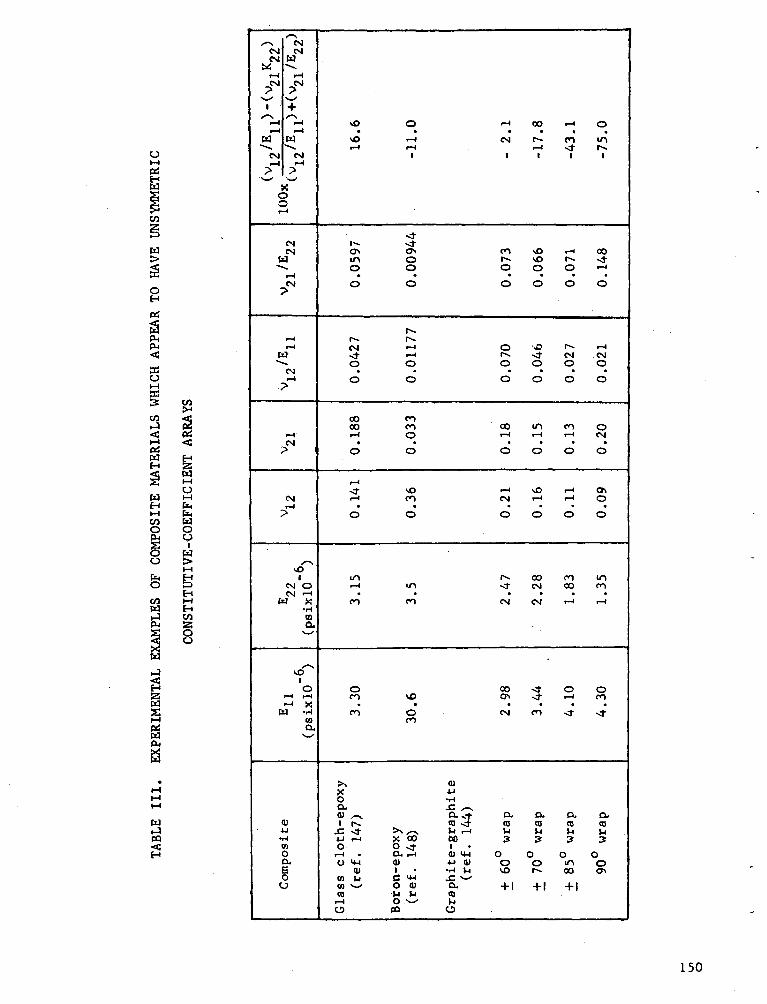
oH
Pi
$P-!
PM
SJOI-lEC
corJ
caH
wrJPQ<H
1
Ui-(O
opiw
Hr-lH
x-v CMCM CM
r-H i,'1--!W M
CM CM
^ x"oor-l
CMCM
W
' —CM
r-l
r-l
W"•-•
CMr-l
r-lCM
?
CM
?
vfT^1
CM OCM "-H
W X
COa
or-4 r-l
-" XW 1-1tOa.
<UU
1-1
COOOuEOcj
\O O r-l OO
vO r-i CM ri f^j |_^i i i
5G\ Q\ CO ^Din o f"» voo o o oo o o o
t**1* f 1**CM r-l O vOvf r-l (^ <fO O O O
• • • •
0 O O O
CO 00co co oo mi— 1 o i— 1 i— 1
• • • •O O O 0
r-l
r-l CO CM r-l
O O O O
m r- oor-i m -* CM
• • • •oo en CM CM
o oo <ten vo CT> <j-en o CM co
en
>, <uX •U0 i-lCL .C s~>(U x . D. <f Q. O.i r^ co >^* co co
J=^f >* S^ r* r-l r-l r-lU r - l X 00 C>0 33O O <t 1
r-l OU r-l CD M-l O O
O M-l d) 4-1 (U O Ocu 1 • 1-1 »-i vO r»
co Jj C <w J2 v^co v~x O 0) Cu +| -J-|co M l-i eg
i— 1 O .^-* r4O co O
i— i
m1
i-H
f*«^
oo
CMo
•
o
COr-4
•o
I— 1r-l
o
en00
•r-l
o1— 1
•o-
exCO
3
omoo
+ 1
oini
oo»^i— i
o
r— 1
CMO
•
O
oCM
•O
oo
If}
CO•
r—t
O
*
•>^
a.COl-i
oo
150
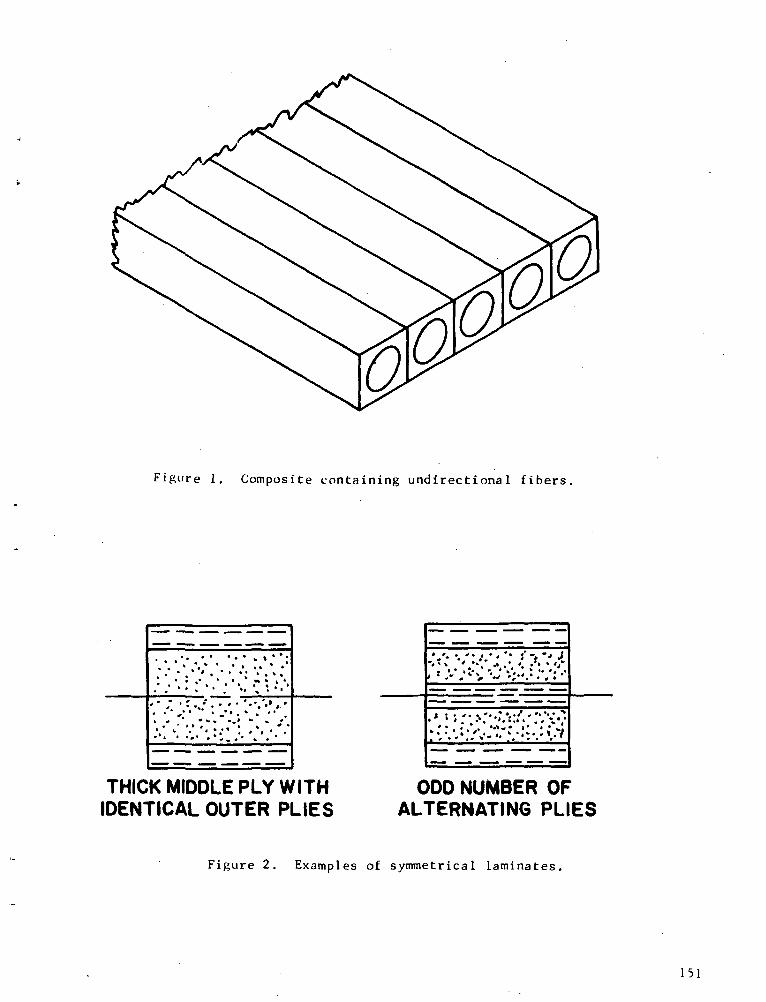
Figure 1. Composite containing undirectiona1 fibers.
THICK MIDDLE PLY WITHIDENTICAL OUTER PLIES
ODD NUMBER OFALTERNATING PLIES
Figure 2. Examples of symmetrical laminates.
151
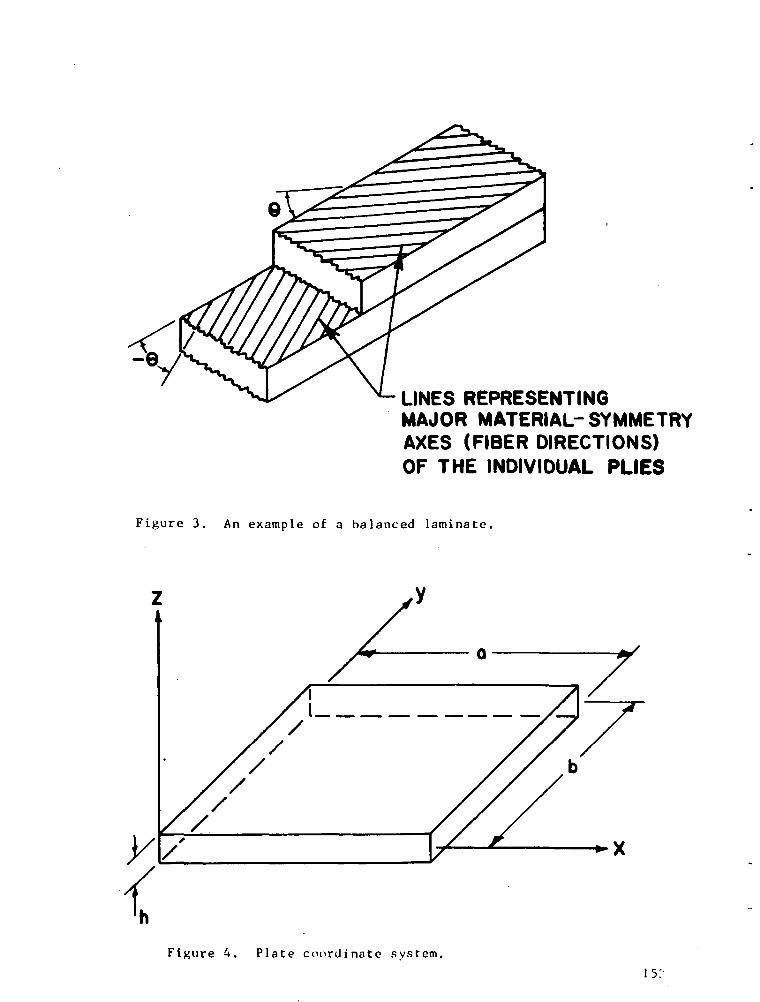
LINES REPRESENTINGMAJOR MATERIAL-SYMMETRYAXES (FIBER DIRECTIONS)OF THE INDIVIDUAL PLIES
Figure 3. An example of a balanced laminate.
Figure 4. Plate coordinate system.
is:
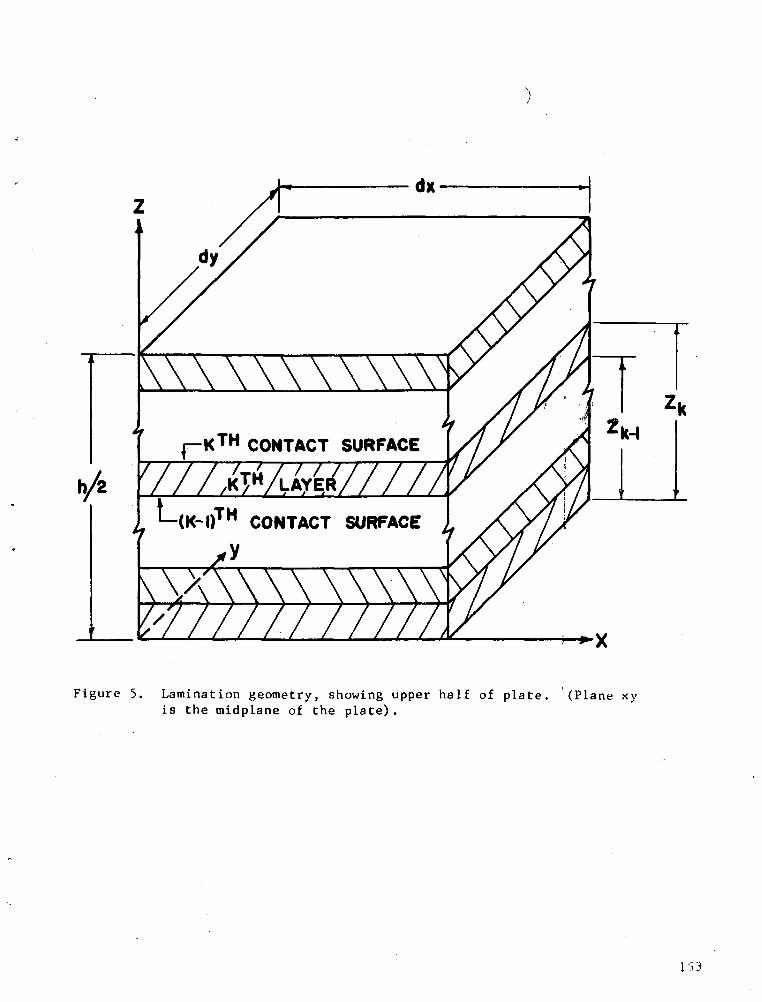
dx
\ \ \ \ \ \ \ \ \vrKTH CONTACT SURFACE
7//M/M/////.
CONTACT SURFACE
VOAXX
Figure 5. Lamination geometry, showing upper half of plate. '(Plane xyis the midplane of the plate).
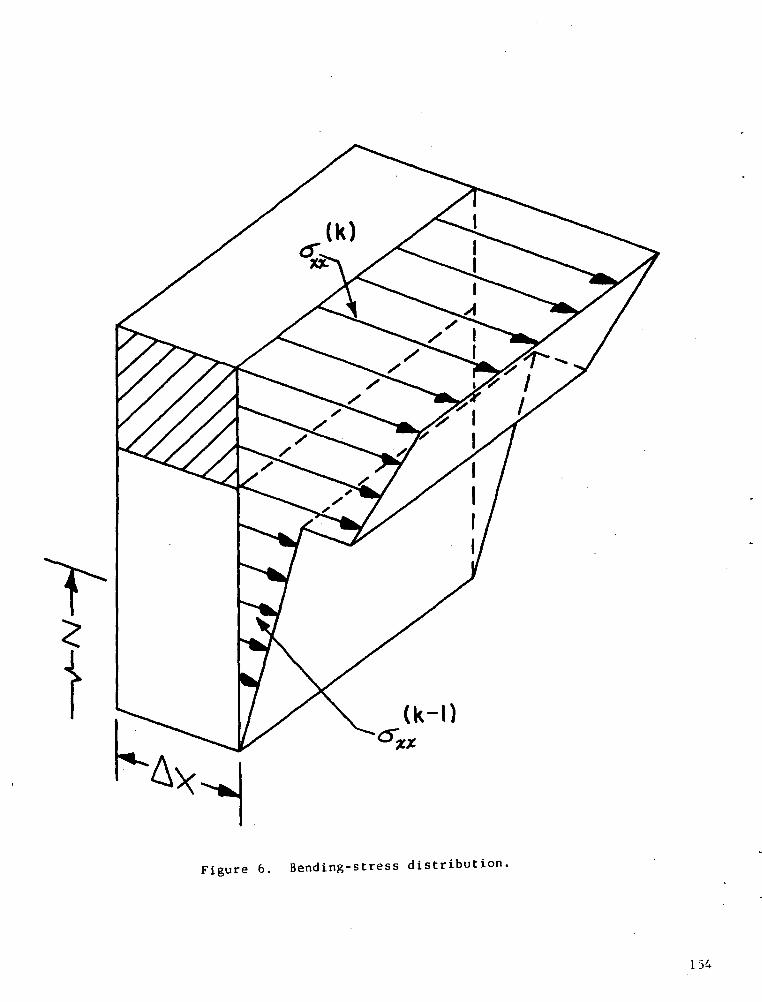
(k-1)
Figure 6. Bending-stress distribution,
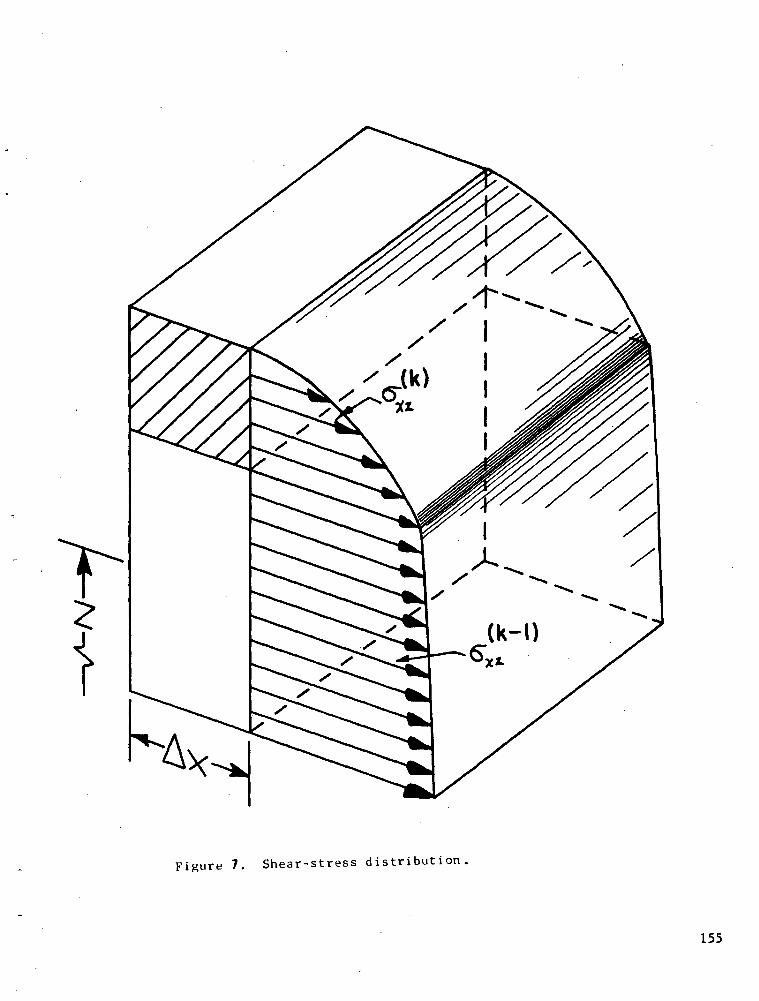
Figure 7. Shear-stress distribution.
155
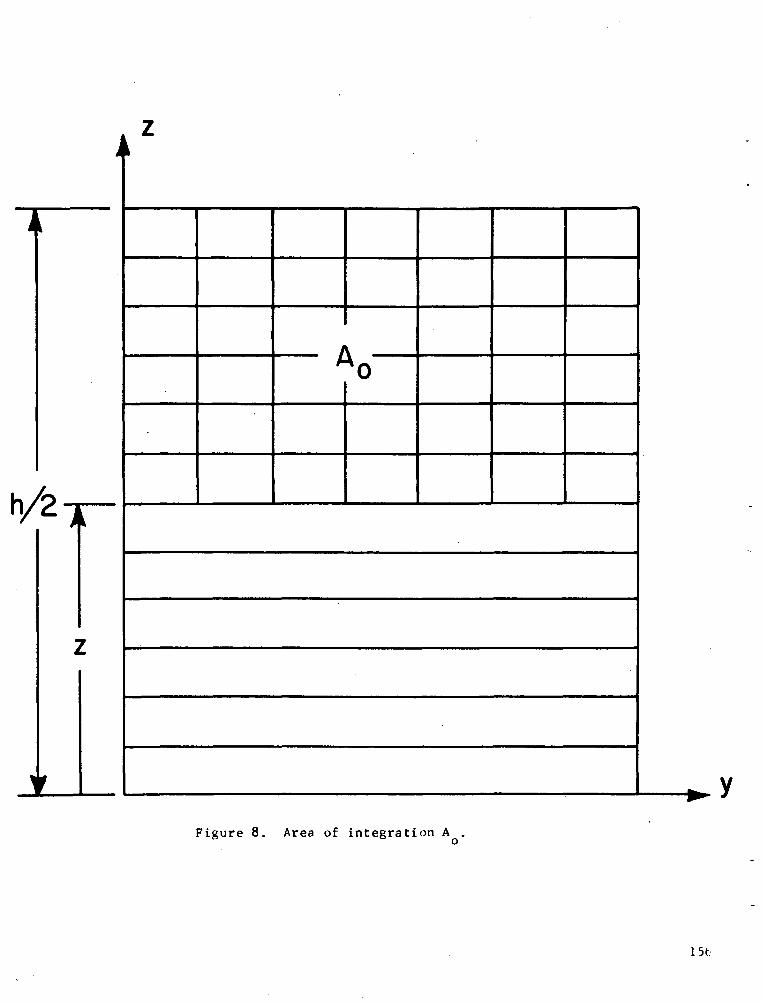
t
h/2
V
Figure 8. Area of integration A .
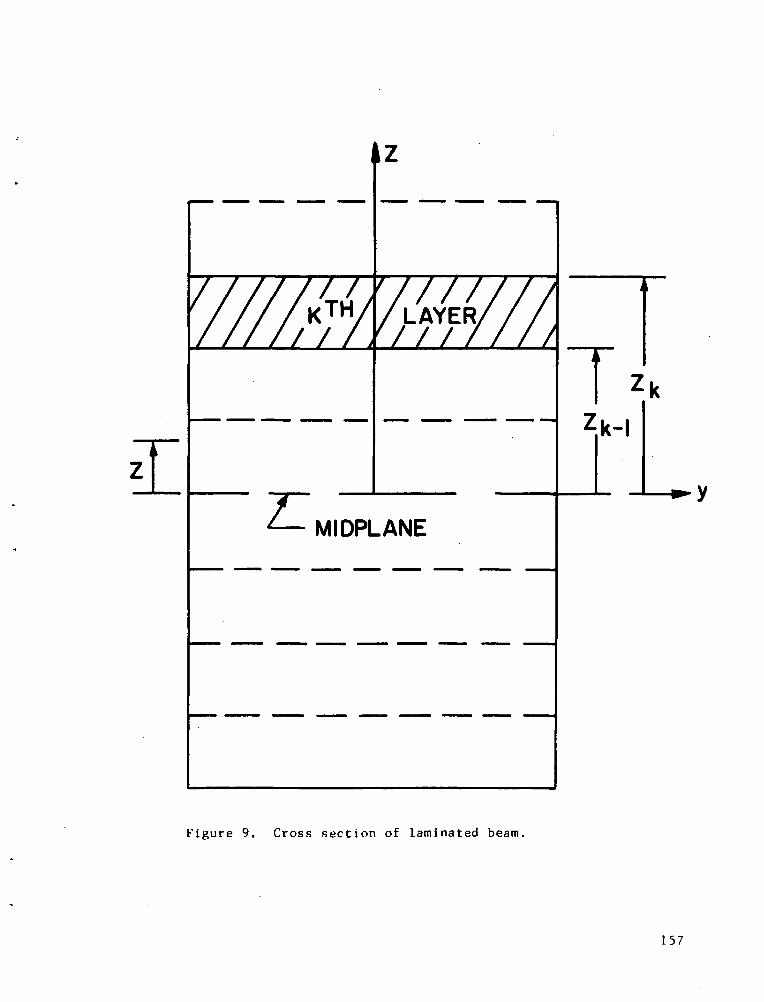
r
TZfc-|
MIDPLANE
Figure 9. Cross section of laminated beam.
157
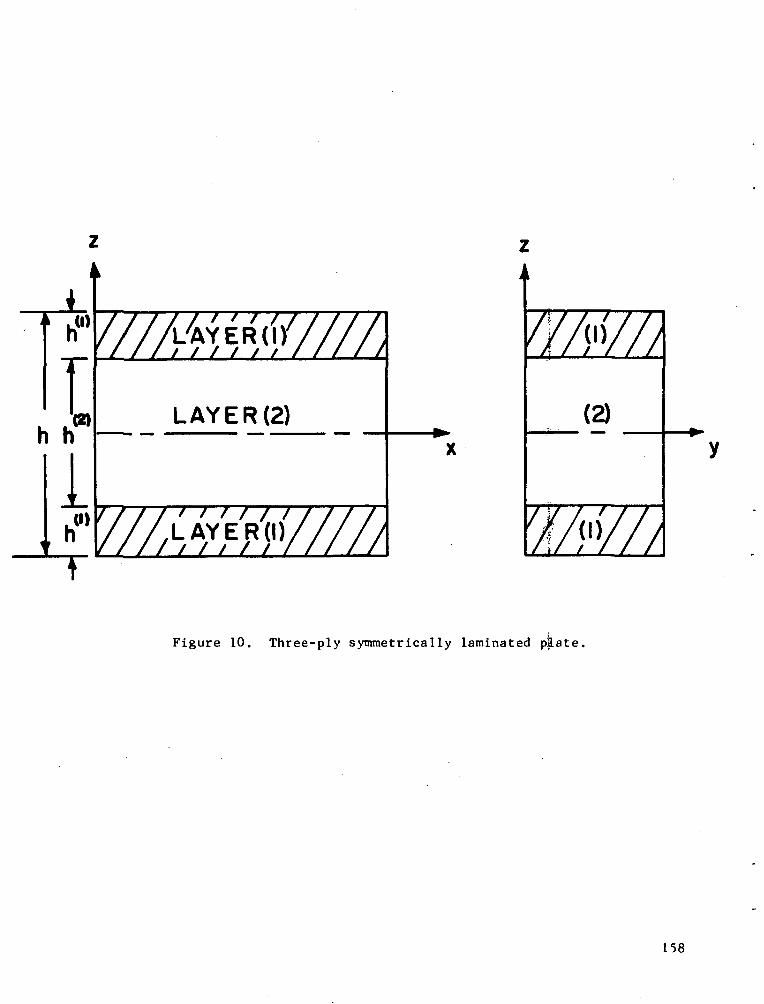
J_* »
LAYER (2)
7mm(2)
Figure 10. Three-ply symmetrically laminated piate.
158
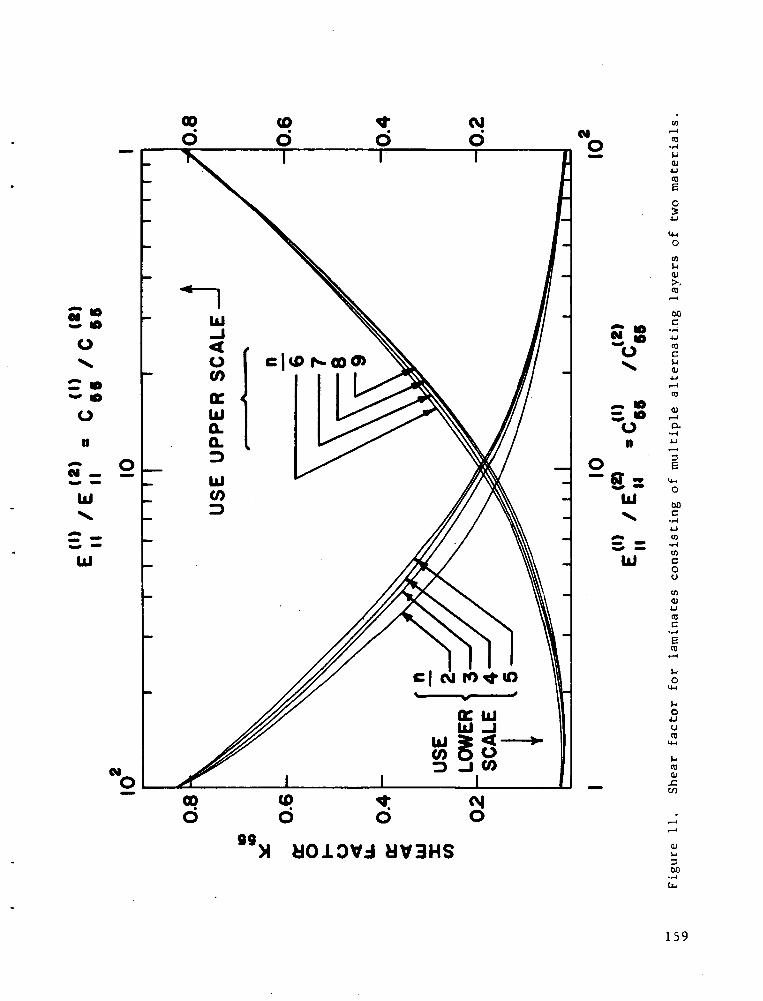
00d
<od
(VId N
C M>
O
on
£_ 2UJ
UJ
M
<-. H>s. »oII
o— g 3
UJ
UJ
U)d
89X
d o
MV3HS
ini—i(0•Hl-i<U4-1R)5
O
oCO
0)
co
(0c
to
0)
D.•H
60C
toCOu
co01
c•r-4
eto
O4JU
0)j:co
159
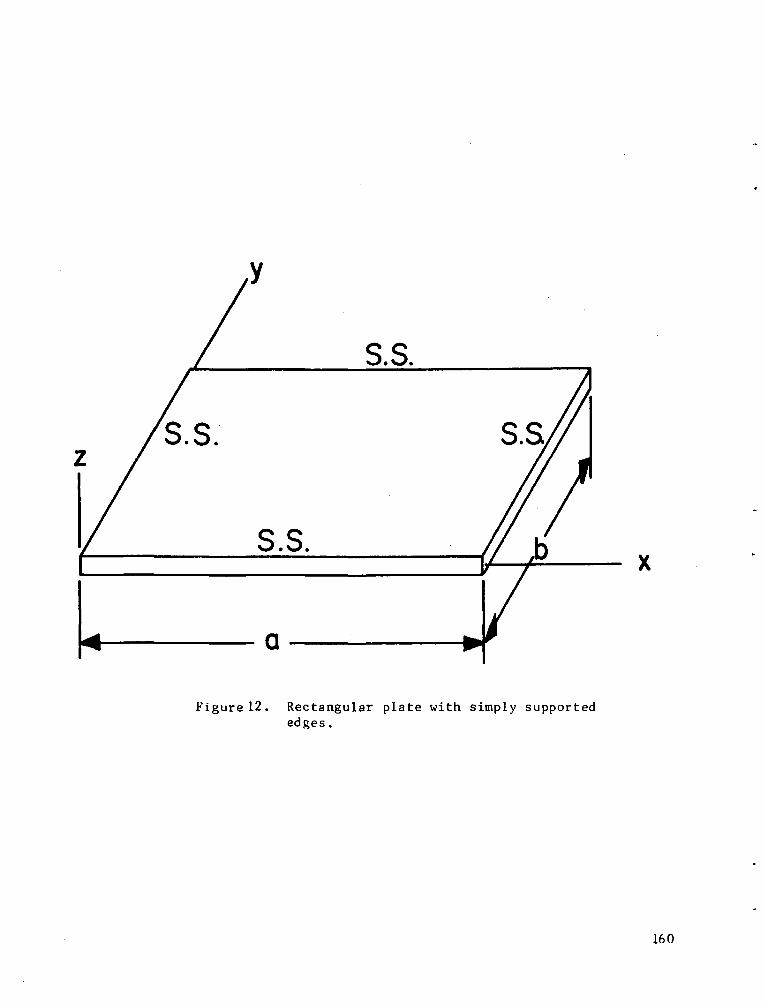
Figure 12. Rectangular plate with simply supportededges.
160

0.10
0.0901
M 0.08
0.07
0.00
THIN PLATE THEORY
TIMOSHENKO TYPE THEORY
JOURAWSKI SHEAR THEORY
SHEAR-FLEXIBLEPLATE THEORY
0.10 0.30 0.50 0.70 0.90SHEAR FACTOR K
Figure 13. Lowest Eigenvalue (A) for homogeneous, isotropicplate.
161
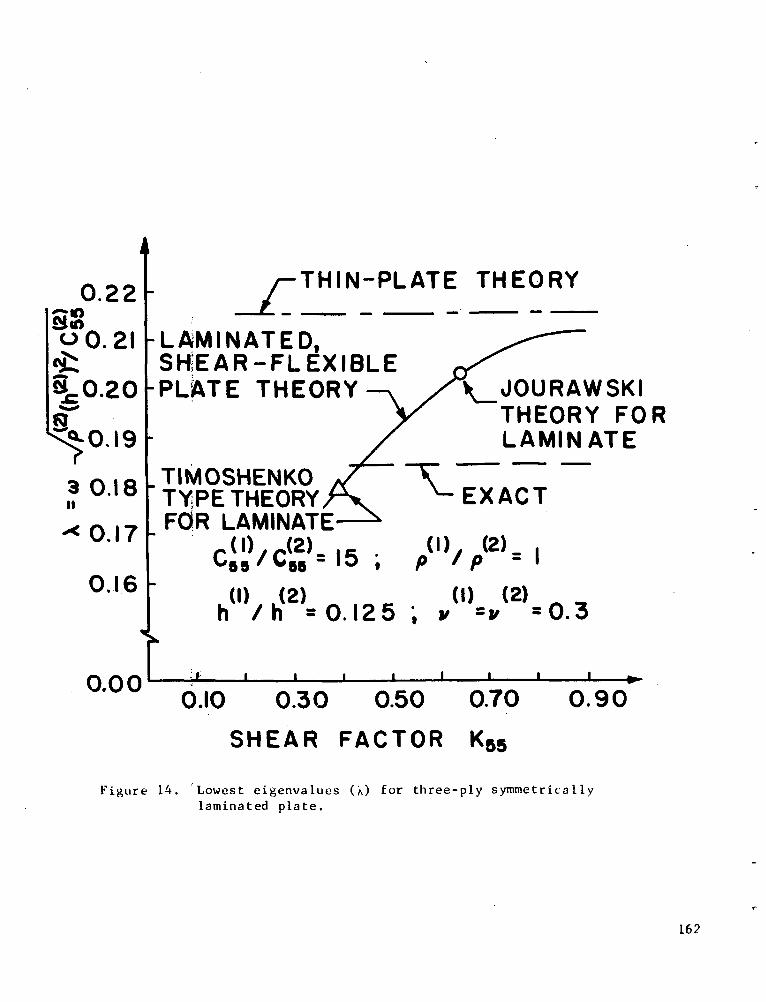
0.223800.21
^-0.20
0.19
3 0.18Hx 0.17
0,16
THIN-PLATE THEORY
-LAMINATED,SHEAR-FLEXIBLE
-PLATE THEORY
kTIMOSHENKOTY1PE THEORYFOR LAMINATE
r < l>//.<«>-
\__JOURAWSKITHEORY FORLAMINATE
EXACT
0.00I
(\) / (2) =
h ( l ) /h ( 2 )=0. .25, ,('W(2)
0.10 0.30 0.50 0.70
SHEAR FACTOR K55
0.90
Figure 14. Lowest e igenvalues (X) for three-ply symmet r i c a l l ylaminated p la te .
162
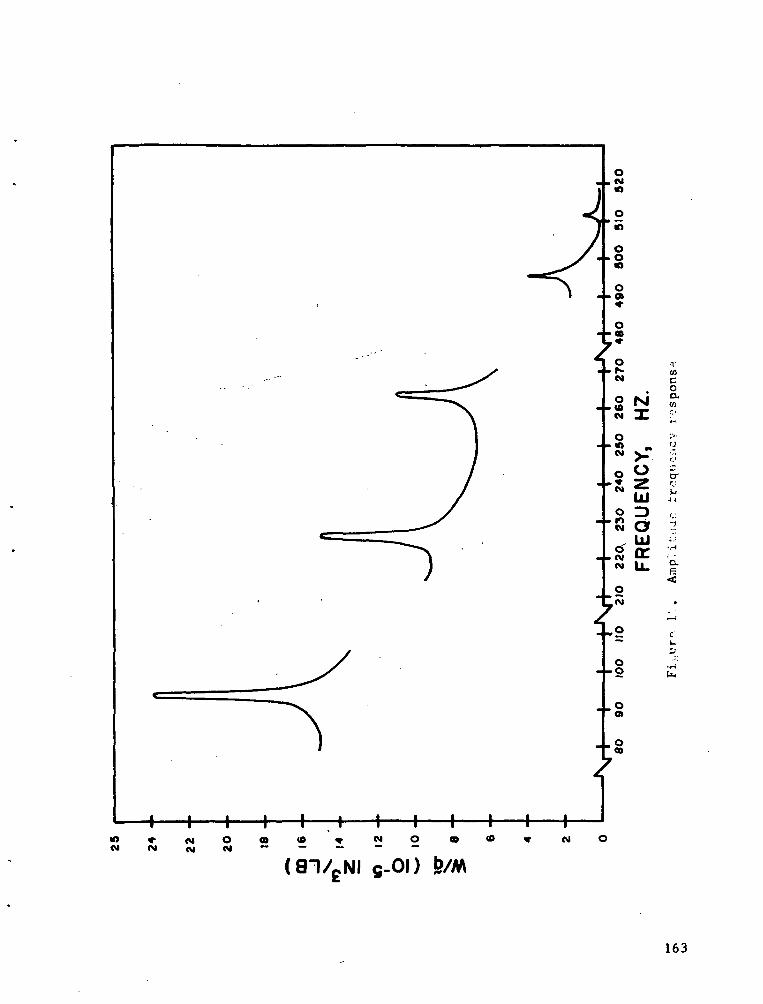
M
-»-2 NCVI J_
O
' *" >^o O
'a 5° P-*•£• cjri U.S a:<M U_
<nCO0.CO
(J
O.R
O• O
. .0*
o00
H 1 h 1 1 1 1 1M (M
(O C4 CM
(81/CNI g-OI) b
163
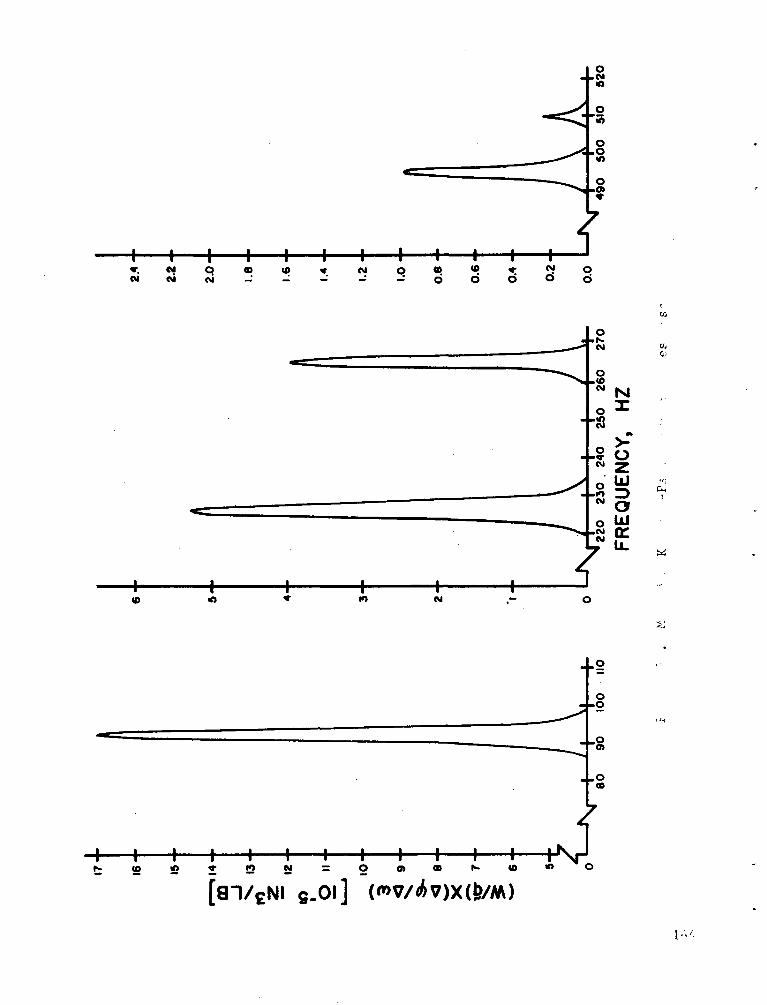
H 1 1 1 1CM
CMqCM
(0 CM
o.f«-CM
O.(0CM
4-? O
CM
I o

Ref. 1'J MeasuredRet. 13 Calculated
Present Calculation OMODE
rKi<I xfs- \
6 <
>j>iH
< » f r ^-o-o-«>e e-oo-o-»4^^-o-OKMM>-»»^^-<> 2
*O<t
<
(
»l
)lI
1010
2T<P
J
"~H
?i
t ij
i $Fi^ur- 17. Wo-Ja l pat'.--: •..> oi t-.h« j.irsr. i.lv: mo-.e . oi :ompo';il:e
raat«rial plates at aagl? of oriencatior. S = 0°
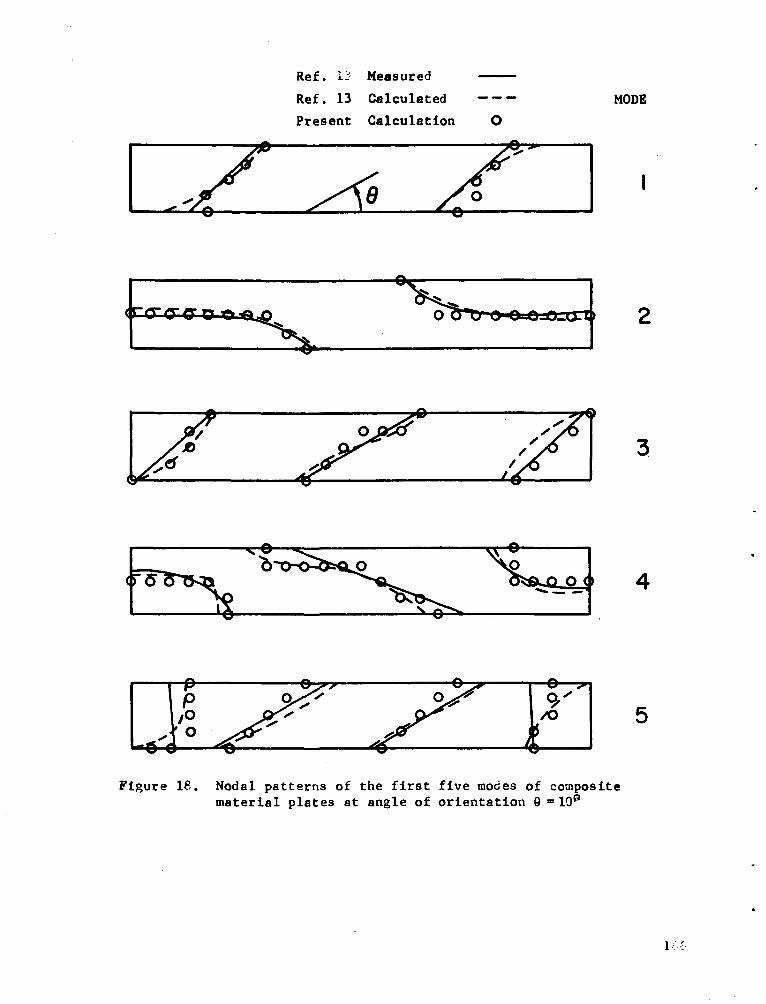
Ref. 1- Measured
Ref. 13 Calculated
Present Calculation O
e
MODE
O O"
O s
/O
Figure 18. Nodal patterns of the first five modes of compositematerial plates at angle of orientation Q =10P

Ref. 13 Calculated
Present Calculation O
MODE
e
Figure 19. Nodal patterns of the first five mooes of compositematerial plates at angle of orientation 6 = 3C'fl
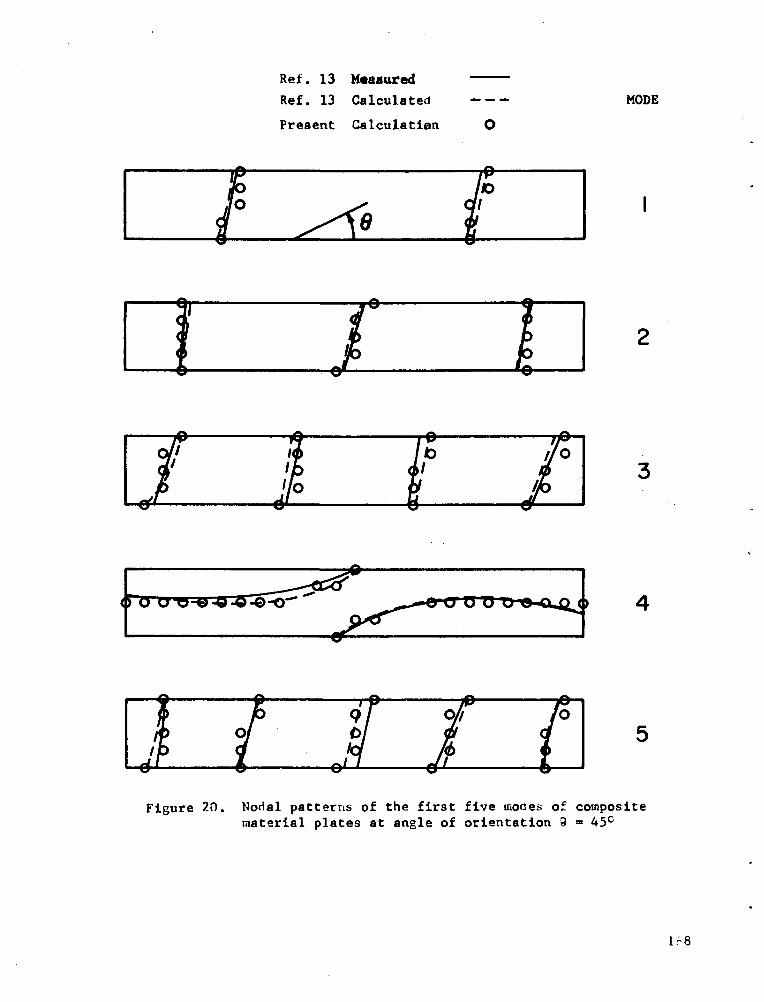
Ref. 13 MeasuredRef. 13 Calculated
Present Calculatian
MODE
eK>
Figure 20. Nodal patterns of the first five modes of compositematerial plates at angle of orientation 9 » 45C
Ir8
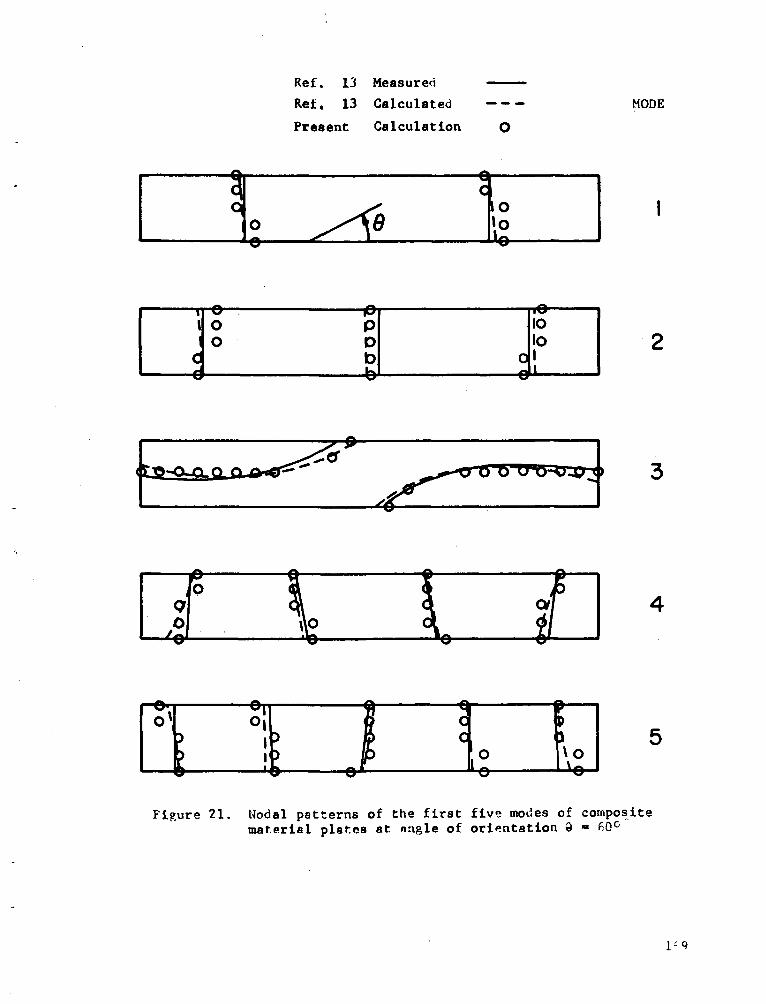
Ref. 13 MeasuredRet. 13 Calculated
Present Calculation O
MODE
O
-
rr« — :1 O\ O
ffPDb
...... ,-b0n
10101i
I
Figure 21. Nodal patterns of the first five modes of compositematerial plates at angle of orientation 9 • 60°
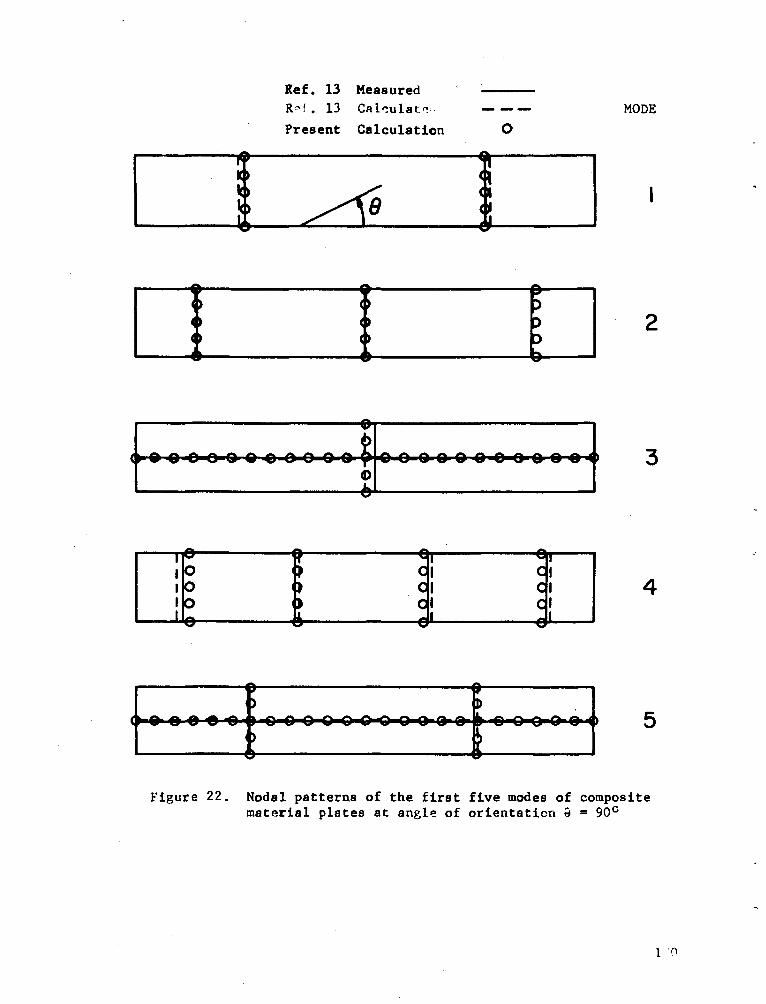
Ref. 13 Measured
Present CalculationMODE
'TKkkI i ^
<
\J (
1
1t1
<b (9 <
I <
iii
P
v
0h
iiiii
o <O iO (
f e> C) c> 0i . r
\ «1 C1 C1 C
I1111
Figure 22. Nodal patterns of the first five modes of compositematerial plates at angle of orientation 5 = 90°
1 0
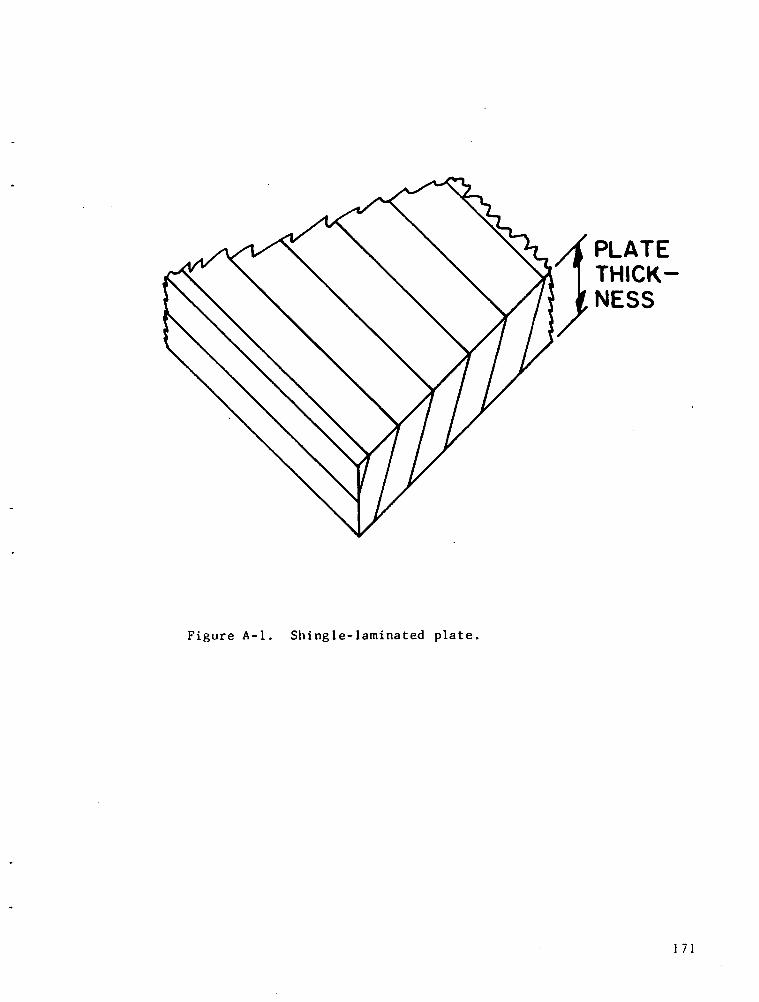
PLATETHICK-NESS
Figure A-l. Shingle-laminated plate.
171
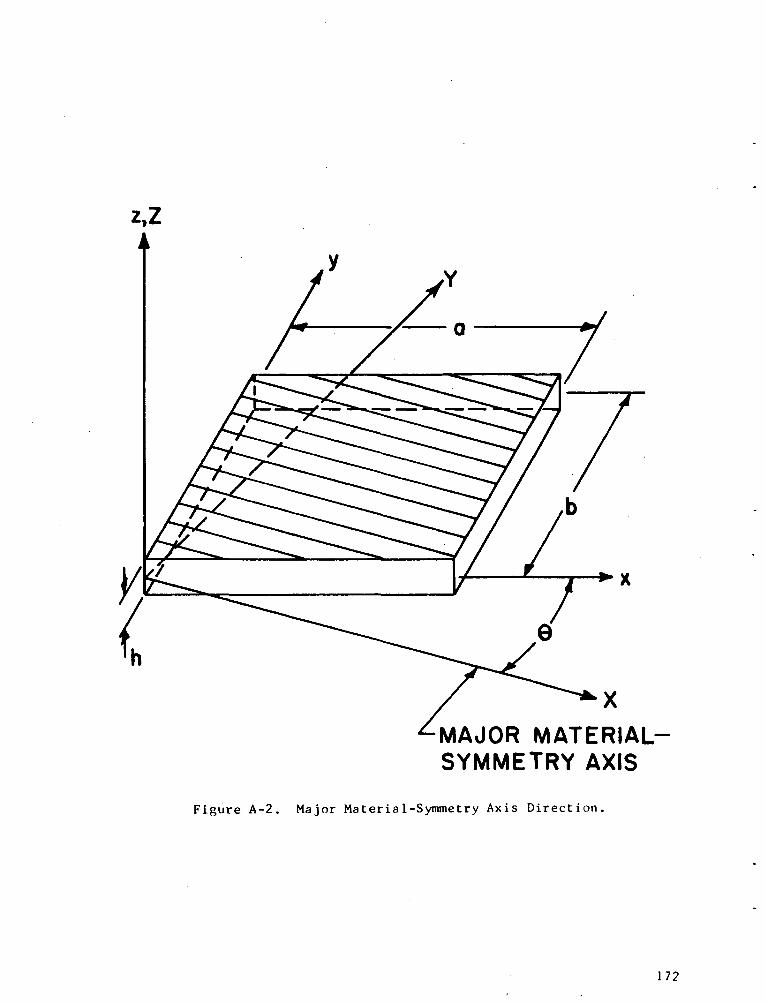
MAJOR MATERIAL-SYMMETRY AXIS
Figure A-2. Major Material-Symmetry Axis Direction,
172
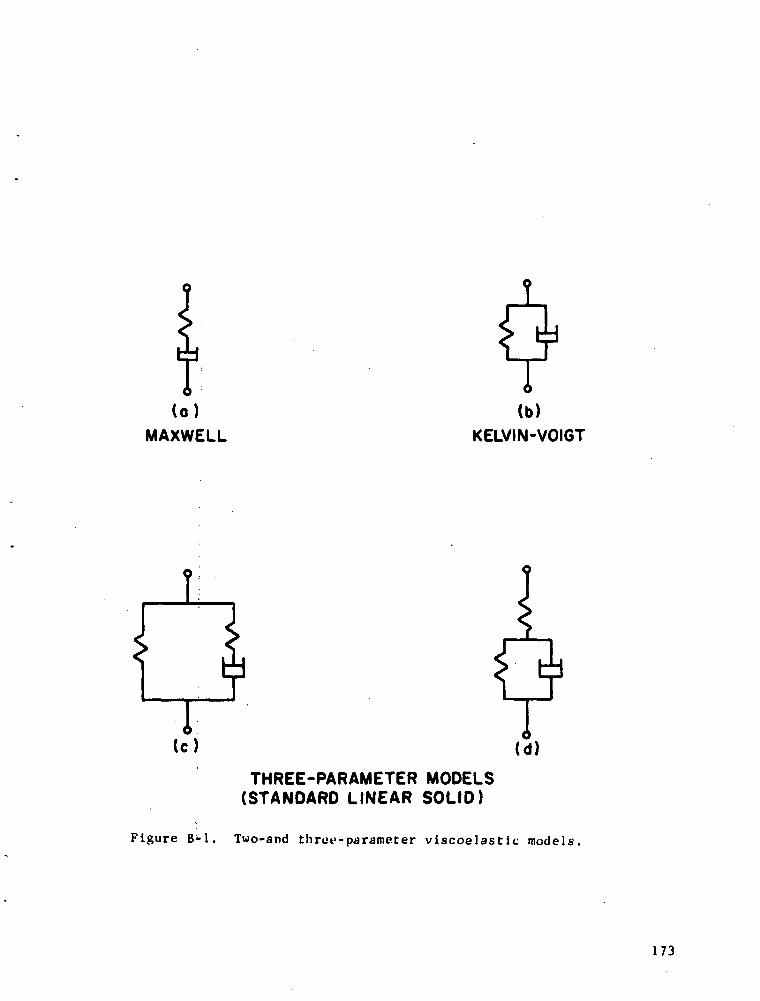
(o )
MAXWELL(b)
KELVIN-VOIGT
1
(C)T(d)
THREE-PARAMETER MODELS(STANDARD LINEAR SOLID)
Figure B-l . Two-and thret '-parameter viscoelast ic models ,
173
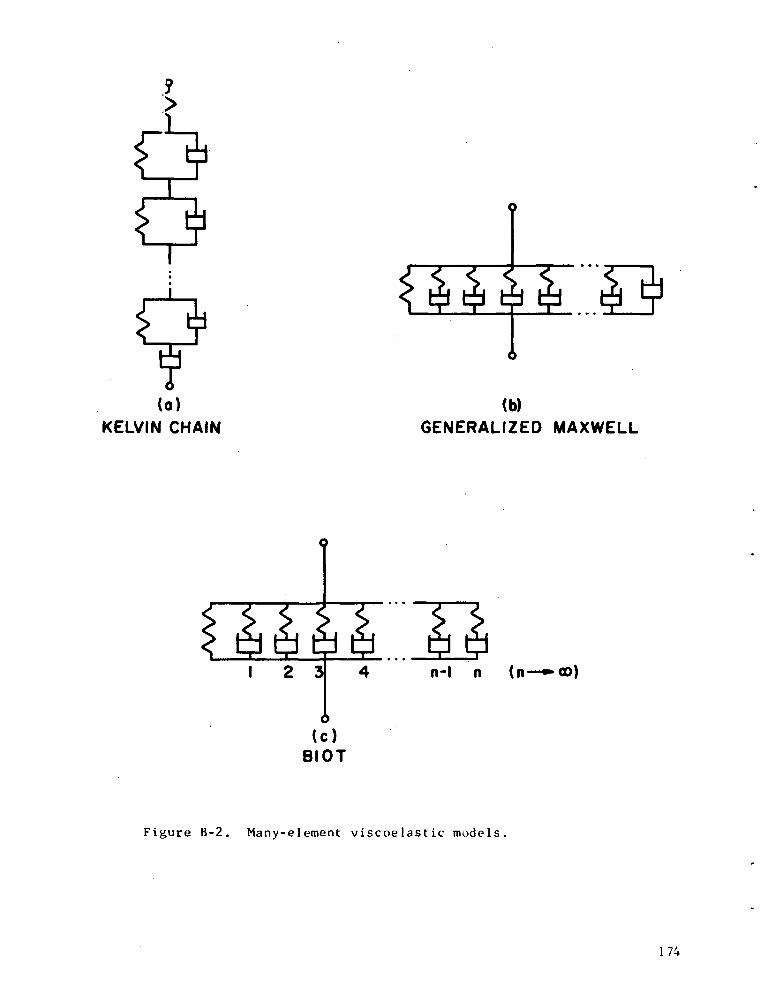
(a)KELVIN CHAIN
(b)GENERALIZED MAXWELL
aa fl gI 2 3 4 n-l n (n—^
o(0
BIOT
Figure B-2. Many-element viscoelastic models.
174
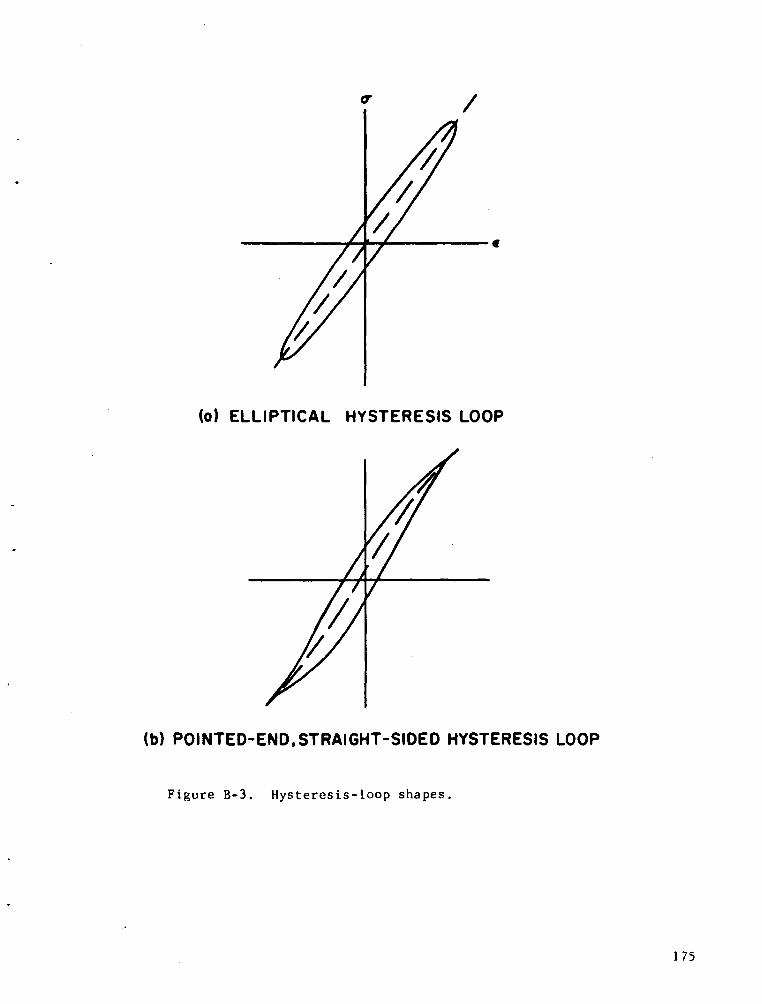
(a) ELLIPTICAL HYSTERESIS LOOP
(b) POINTED-END,STRAIGHT-SIDED HYSTERESIS LOOP
Figure B-3. Hysteresis-loop shapes.
175
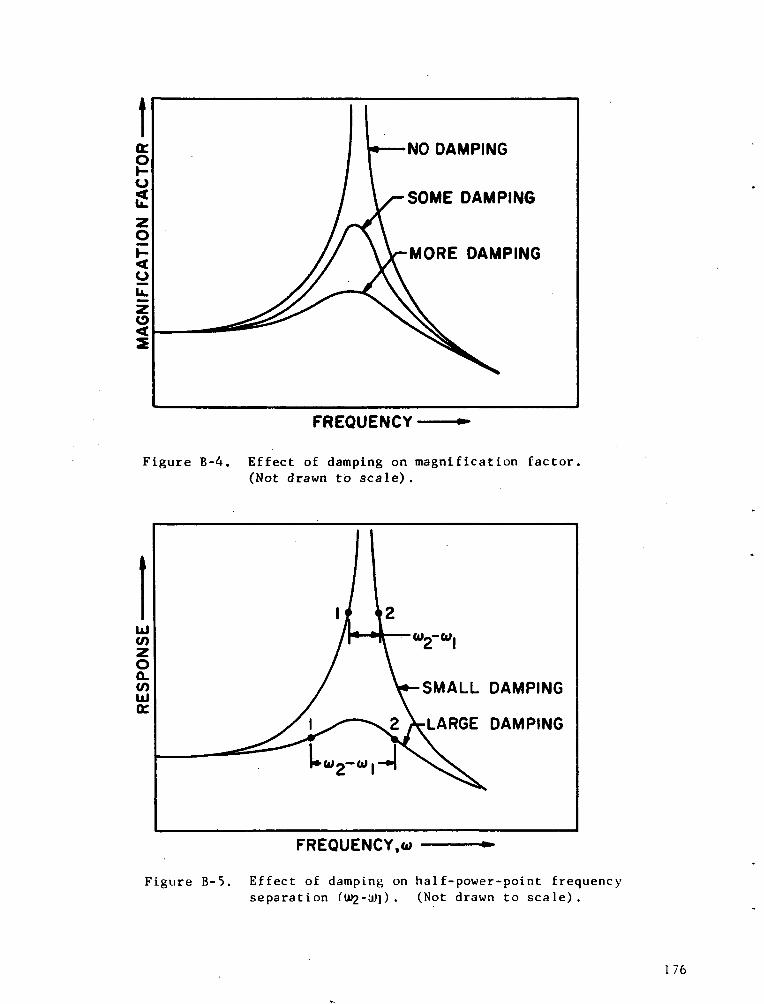
ccou
<o
o<
NO DAMPING
SOME DAMPING
MORE DAMPING
FREQUENCY
Figure B-4. Effect of damping on magnification factor.(Not drawn to scale).
OQ.</>UJOC
SMALL DAMPING
LARGE DAMPING
FREQUENCY.w
Figure B-5, Effect of damping on half-power-point frequencyseparation (Ofy-it)]) . (Not drawn to scale).
176
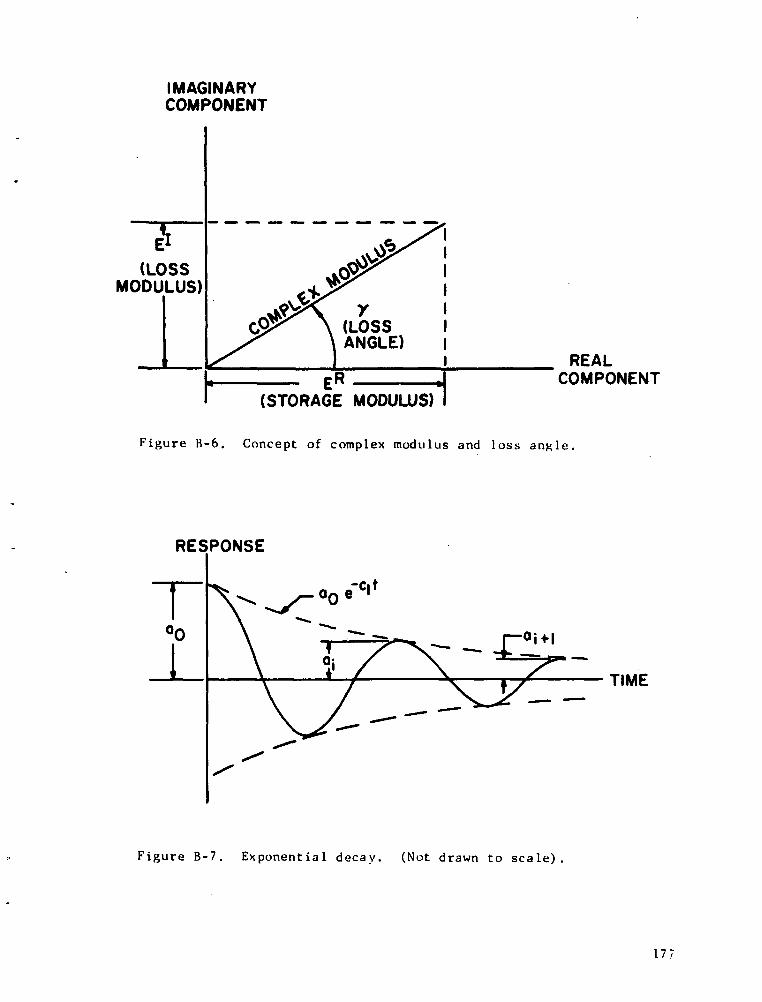
IMAGINARYCOMPONENT
(LOSSMODULUS)
REALCOMPONENT
(STORAGE MODULUS)
Figure B-6. Concept of complex modulus and loss angle.
RESPONSE
°0
TIME
Figure B-7. Exponential decay. (Not drawn to scale).
17;

FIBER MATRIX
LAYER "aLAYER "b"LAYER *Q*-LAYER "b"
ETC.
Figure F-l. Medium containing many repeating alternating layers oftwo different types.
178

IMAGINARY
I.
REAL
W/W s 0
0.9
Figure H-l . Theoretical Argand diagram.
179
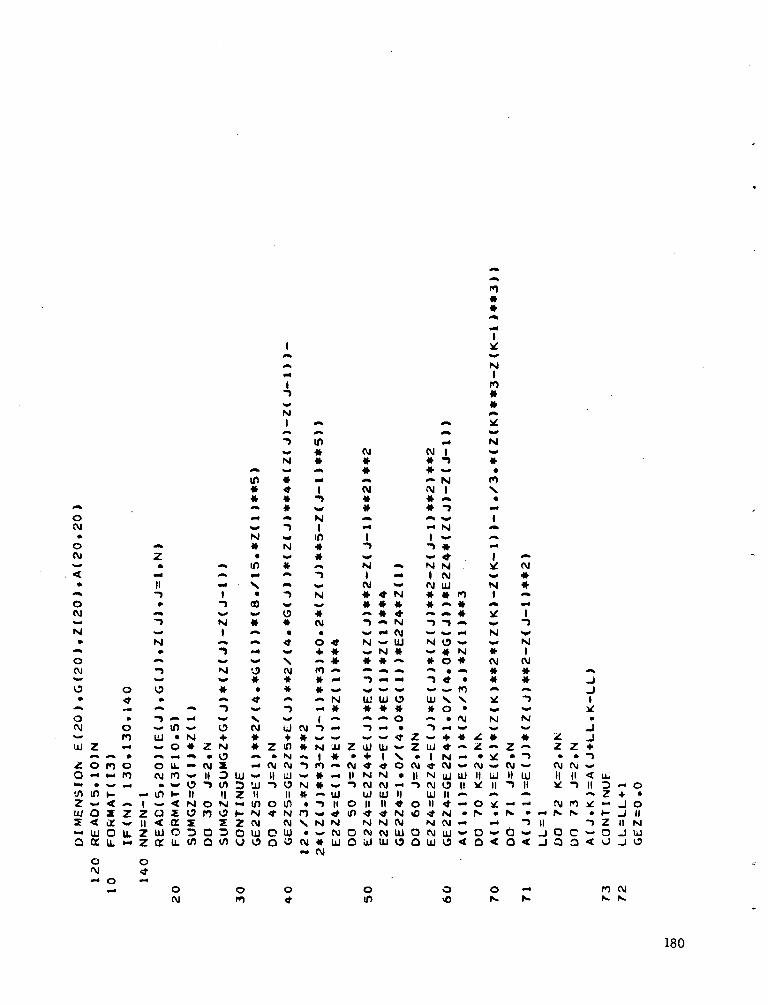
oOJ
ftoOJ
. ft
^1
N
oCM
••OCMw»LU Z
~*£. OO -** •!/) mz ••»(u oz <-. UJa a
o<M^4
.*
•On.*
«•» •n o*- n• .*K< **Z Za: «-0 U,u, «
0
Zft
II
N•>
**
~
»«•»
^—UJ••VIoCM
•-4 \f>
1 ' —
z au <Z UJz ao**
— «••» —m ~• rsj0 »•* — >u. —n <-s^ (J
1- II< NZ Oa. xO 3u. </>
oCM
z•
CMII*S
Onaa
art
1
M1
*-
™)•
O+NOzoyiIISIV?Z
(/)
in
*^*N
in
X
*
*~
*<J«^XCMftft
— •*4
U —3 UJZ M** inK NZ CMO UlO O
o1*)
1
*•1
N1
N
ft
IM
0ft
X
«^
^u4.
z m• N
CM <MII dJ•> o
no in•* N
<MO UJa o
O<t
CMnft*»•«^Nft
•nx•
CMM
in**i
N1in**
N
ftCM
O <f+ ft
Jt ^
— N
— ft1 ~
«* -*N JJ1 «
ft •-•ft •»•-. UJ-) II«^ 4^N Nw CMft LUCM
CM
ft
1
N1
CMft
N
*n
UJft**T«*
z uj• +
CM ^|l Nl
-> CMU
0 |tm •*
NO CMQ UJ
om
«t N
<-» M- CM~ UJN ftft -»
*4 W4
UJ Oft ft— o1-1 •«* <frUJ *~1 X•* 0N •CM —UJ HII «^ NjN CMCM UJUJ O
CMftft
CMftft
1
*•*N1
CMft
N
ft
1
UJ&
—TZ -z uj• i
CM <rII N-» CM
UJ0 II<o <t
NO fMO UJ
I*E
2Z
4*(Z
( J
)-Z
( J-1
) )
K3
o ft
ft N0 »
^ *
X Xo •• <VJrl
•f ft
* ~h4 **CM *•
UJ UJ13 IIII —<t — iN •CM -•UJ «-0 <
o<o
*ft
7*M
nft*
N
ft
mX
i
1
N1
N
ftCMftft
^,
N«<i ftZ *•• ~£
CM •*
It U* II
—0 *N •
—4o ~o <
oN.
Z•
CMM~>MN
do
i
N1
CMftft
T
**ISJ<^ft Z*» Z•^ •«- CMUJ IIII *~*- CM» -. Ni u•- _) O< _J Q
—N-
1
•>-1J
Z +
• ^CM —
II <-> II
^n ^N •i
c -o <
u-3Z
—f»ZOu
nK
— o4> •
_l 0-1 IIII N_J UJ_J 0
CM
^
180
zII
tart
tart
«»X•
Z * tart •>z * ~ ~• • • <
•« - _J *II II II -»Z — ") Z
0 •z «t • m -• in «Z N O f*> + ^ wu n ~ <* O « o u O n* O < D -J O O
UJ3D D* Z< tart
< *••
M Z< O< U
<#Az o•*• 4O N "* UJ 1in o «• || M
0 N IIII UJ —u o «
N'JJO+mNMOJo+4-NCM
— UJ1 O* II* NII UJ
* O
n
*
(
*-».rt;
«*
UJ4««• Z
PO •X M• II
**II 0n coN- OUJ O
•rt
M
ro
N
*
X
*rt
l
l
N
^
N
*<M
**
N
*rt»1wUJ
*mo4>fON_
UJIItoN
UJ
UJDZ
*+, **
~* Hf^ Z# o* u
**^•rt««
N
*o•rt
««.
UJ4fin•oIIN(M
UJ
(VJ
**•rt
1
*
N
•UJ
*in•o^Z M
• rjfu NII --> UJ
II0 N0» t\)
NO -O UJ
<v
**•rt%^
N
*•rt%^
UJ
*in•iN(MN.«UJIINrjN
U
•
»4
S^
^
*N(VIIM
•rt
UJII"0N.4
UJ
(M
*#
1-}
M«
(VJ
**->^^N%i
***,->^^
UJ»m•
z oZ 1• N
(\l f\|II N~1 •*
UJ0 IIo rsj•rt (M
NO -
«*l»
«^1T
**N1^•>^
N^^
*NfWN•>UJ4>
")N•rt
UJ uJ< 3II Z"1 tartNl K-• ZUJ O
CM N* UJ# tf-, (flr*i *N M- 0UJ Z^ ID
+ inro ^N X-« nUJ Nw *rt
II UJ
rO </5N II— ^UJ U.(ft (n
^u.w*2«^O•rt
^4
•
»0*l*
UJ.tart
a
•SM
EA
R
FA
CT
OR
K =
«,F
7.4
//)
•Hin•C\itart•
•II
Zo
• CVJ«« •«h>< O
a0 0u. o
^*tart
X•JJ
JJ 0< zU UJ
oro
mN
OCD
OO
O -i
181
AL
. B
Y
C.C
. S
IUA
CT
OR
Kl
1X
2.K
22
X2
.K1
2X
2A
LY
SIS
B
Y
S.
SR
INIV
AS
T
O
CO
MP
AR
E
U U, Z<
Z JJ0 d Kx, « ut- X << in xCX UJOJ UJ«- t- Z> M <
tnuj a oi A fx Q.
J O </>a u 3
INC
LU
DIN
G
TR
AN
SV
ER
SE
S
HE
AR
D
EF
OR
MA
TIO
N
FN
TS
F
OR
3
LA
YE
RA
S
3R
D
LA
YE
R
> U UJa - so u. <m U. :/lX UJ»- o <n
W *•*
UJH- v) a< (/I UJ_J UJ >-a z <
U. JZ iiu.
« i- <n3 </> -
z «< <»CV» (JX •CM •-
• UCM •X x>
CM —CM CM* CM» U
CM •X M
— CM«4 f\|
^ VJ
CM —
• CM•*< -•V5 O ^"*• • in
CM « • - — . •o CM •"* in in» u o m u
-4 • O ** UJ
o — • — >a M « < ijjCM •* <0 — —i o o m in• • • • <r» UJ UJ
- - « m j * u• -i in in > o ai u in <. xi a u
u • •z z • z z u uo o - a o <x uin io in 1/1 w cu nM M U XI M X U
u u • u u * •UJ UJ xi Uj UJ < <a a — a a a ua a in a a•* a aUJ UJ O ill UJ UJ til-1 J • J J 0 0CD CD ^^ CD QD ^1 if )3 D in 3 3 K Ho o «»• o o z zQ O U O Q -i «
UJ
H-(XUJa0(XaUJK4i
Q^
UJa
z
DZ
CMXCM
CM **X CMCM •CM Oyi —
» u.<M <\iX •
•4 .* o
«4
•* U.N ro* <^
in t-II Q 21 < CX-> lii O-> a u.
(0UJ
aUJa.oaaUJK<Jau».a:*
22
X2
.K
. 1
2X
2 *
AN
U*A
N
0.2
)
^£ •"• U.
CM CMX »
<^ .^ 0«« wrt00 U.* ro
\o -^• ^»UJ <» »r* 2XI IX
a o3 U.
H-zu;uM
U.a.UJ0u
_J<u
NU
.**2
.),
<.tv
oQ
~*><V •-0 '-Q -•, O
-• II115 -
-, -•»• »-
M ^
CM
*
Z<10o»
— »•«V CM
^ *•*
Z U< IIII M
CM <M«< — tU U
ta*
1-1 1
* «*4
—• UU IIII xi
CM CMCM CM0 U
Z
oQ
+*«0Q
CM•\oo«^n<t<tu
If, CO
u u u u u u u u u u u o u u
182
zVo0•
•-4
t^
»M<fr
*UII*"
•*U
o0 QQ •• O
0 11H •*
in in^ ^U 0
oQOnin*o
M 1-4 CM
M M O
*« « *• •* II)
<t <? ^ <fr ™
* U <t U *U II U II -II «•* II •* 1
<n in >o <c uin in *o >o **u u u u a
••• •*a a» *in in0 0
* ** **•• ^o <o0 00 0
O "k*-lII II
- <VJo o
O O 00 Q 0
_^ flf\ ft** \4J \J
II II -— CM nI I X
oo•
oa.
0Q
_ _. Ift•* III
H ^rf f\l PA j+ lA «d AJ PO ^ II^ v X j n i ^ u * * 1 * * ^ ! " * ^ n<M I* II H II II II II II II Uo ^ o b O o u j ^ f l o O o oa a a a c r a u u i j u
S
MA
TR
IX
WJUJzu.u.h-inUlK<J
U
U
1 1
I/C
66
I I+
C6
6I/
C6
6I I
)*G
l**2
I/C
66
II4
-1
.D
O)*
G2
**2
U —1_ »M
« —0 UQ -
• *m ofM Ou •~. c< ••<J X• o
tf *\^ ^J
a A•*• ml/l W< +
12
I/C
66
II*C
66
I/C
66
II )
*G
1**2
u^^
*oQ
inCMn*%OU•
t/)<
I/C
66
U +
I.D
O)
*G
2**2
iCM**U*• 0» Oo •Q 0» II
O ->- uV U0 •
• fyLL
in —fM (ft+ <
12
I/C
66
1 I
+C
66
I/C
66
II l
*G
l**2
U+*
*o0 0 OO Q •• • in
O O CMII ^ IIO uJ <u u u4 rf m^* JJart ' fYU. U
l/> t/> I/)< < <
183

CM#
O
*«Ml
(VJ MI CM
* O *# £ #CM U CMO X O* MI *
O \0 O0 0 0• + •
•M tort «rtJ
+ ** +tort £l tort
*"i \o ***O O ^0vO X vOO MI oX CM XMl (\J M
- (J Ml
CM — CViMI * CMO O O— O w O* • # O
O CM O 0• II • II
— B — OX O X O
o on a a>• a. • tr
CM en CM tn* < + <w* »*
I I
)+
20
0.D
O*K
22
X2
*
*0«0OXMl
4
<
O
**CMXXMl
X^»CMX•iMI
4f-O0•
o o o o oO O O O 0
0 0 0 0 —II M II II II
O UJ < CD Oo o o o oD CD O O Oa cr a a a(/> (n (ft m in< < < < <
*(C
45
I/C
66
II )
)*G
1**2
6.O
O*K
22
X2
*(C
5b
II/C
66
I
*» .rt,
CM XX 0X O CMMl • »
x m »«•» (VJ CM» * OCM — *X « -.
— O MI^ O MI» o oo x -oO Ml (J
• Ml X
O •* Ml
O <t" Ml
•* o m+ *•• — » oMl CVI —
Ml X *
o MI CMo — xo * CMx # -M. O *irt ^> j&UJ U win • oO *Q Q
•» X 00~ 0 XCM Q OI • 0x m •X "* vM
— * +MI CM ro
O O
* *** «%Ml Ml
Ml Ml
*o o<o oo oX XMI CM MI CM^ 13 *n o* * in *o -. o —* Ml * Ml
•^ O •* *0CM «o CM >ox o i oX X X XMl Ml Ml Ml
X -1 X Ml
— * — in* * * inCM O CM O
X — X —— * (VI *MI CM CM (VI^x i|£ . vx
* Ml * CVI
O MI o CMO X a x• » • »
O *•» o M.CM O CM OH O M O
O •* dj <t
O X O X
0 O 0 0a • a •*^ Ul ^^ uj(/) — V) w< -f < *
** *-l
krt
tort
vO
oXh«
•*o
*CMIXMl
X«^
*<MXMl
Ml
4o
o o oo o •• • o
O O CMM II M
< (O Oo o oO O Qa a aW (fl </)
61 I
)*G
l**2
+l.
DO
/12
.DO
*
H2
)*(C
44
I/C
66
I IJ
+(C
44
I
<O XO MJ
X Xtort %*
•O «^5 I J
CM O OO •«• •* Ml (\J
"••"• —Ml •O #
* *0 CMvO O X<0 X —(J Ml Ml
X - *Ml Ml +
MI 0 CM
* ** #* •» #O 0 CM- 0 «3» • #CM CM —X -I O
Ml X O
Ml O •
^ Q M)
* • +o o M!O II vO
<» O OX O XO » hrf
a o MI. a -irt <•_* _iUl ^^ ^
— (/) O* < «*fl Ml
c^/^
^J
Ml
Ml
<00s«ooMl
•*50X
CMvrt
o%^
*o0•
CVIMl
Xoo•
•GM
- uj-» O
M> O
\rt QfO - ~w
O WX <CM
CM4t4tCVIO#oo•- 0 0* Q Q
tart ' •Ml 0 0
o II IIO < CDX <J O
Ml UJ IJJ
CM a ao tn w— < <-<
*oQ
CM
XO
•fCM
**O
*0 M# Ml
— *« o^3 ^^>0 Ml
O OX «OMI CM Oin o +in » MO M Ml
^ MI JD•» >o oCM 0 XX O •-X X CMMl Ml Ml
I Ml (J
» m «-* in *CM O 0X w OCM * •(VJ CV) (VJ
* X —# CM XO CM Oo * o• * •
(VJ 0 OII O II
0 <t O0 X O• o *
UJ Q UJa • a^* in —in — w< * <
MJ
*Oo•CMMl
Xon•
Ml
+
CM
*#Ml
19
*
*0OXMl
\Q
\ooMl
Ml
ooX
CMCVI
CM O» *** #CM O0 O
* •— CM
O —O X• o
-J Q•+• •
M 3
0 ^
O 01X O
Ml UJ
CM a.
o en— <Ml
H2
)*(C
55
I/C
66
I 1 )
4-
(CS
S I
XMl
X
$ooCM**
(VI
CMCMy+(VI
**(VJ15
*Ml
O0•M>
+_
vO
o —x -»M Ml
(VJ \0
0 O
— XMI CM
XMl
at-<z<IM
K3jOJ
UJh-<_J
O
O
184
oo"—
CMOojX•*otr«^CVJIX•4
r%^4frOO•CM
**«CVJ#
*CVJi oX Q
^^ C)II M^* *s
o u
« «
< <
o0
+CMOaxoa*CMIX
x%*4tOO•
CM*^
*CM4t
*CM
O O O O IQ O O Q X
o o o o ^II II II M II<J O UJ < CDu o u o u
S a a S S
< < < < <
0o•
+CMOax•4
a<r#**CMXX•4
X•
*0o(M,,*4rvi
****CM
O O O O O XQ Q O Q Q X
II U l| II II II
O O UJ < (0 Uu u u u u u
a S S 2 a £
< < < < < <
CMOaxv4
Oaw
*oQ
CO<0NXOo**•o+o
' 0
cv;
XO O O O O Oa o o o o oo o o o o —II II II II II IIQ UJ < CD U OU O U U U U
O U O O Q O
< < < < < <
CMOaxoa*ToQ•
co
(Xoo•*<Q
ooCM*>4
Xo o o o o oQ O O O O O
o o o o o ~II II II II II IIUJ < CD O Q UJU (J U U U (J
Q UJ U UJ UJ UJ
< < < < < <
Koaz
J
U
«•%
uUJ>UJ
J<>UJ
•«*4• (/I
< 3• _l
t- ZO UJo oa ~Z UJ
J ^-A**
< /y•J.
A,
*+, ^tari »^
*W <ta
J J
< <
UJ LL%^ »K ^*
iTJ ^ ^^
• o ro— !/)!*!n /^ (TVa w^M II »
-* cO N— ^^
O *^ (Y^ -*•
Q U J»
O (J U u o u
185
00t
<0P4
O»•
II-^
•»
CMM
•
«*
Ul3J<>ZUloM
UJ•ft
X0tf•
•o•+*H.<zcrou.n•0
in.in»
p*
inO1
**,••* "+ ->~> ™>•^ I-> oII in
-> u." **
***X
*
X
CD»•zta.
HO0oraUJzM
H-
Oa ao a ceH Z 3(/> UJ (/)
—in
*p»UJ -l5 *,*< Xa •• P*a ~M -JU) X
•z —CO -.t«-« ^»*
CD2 •p*> **>
>4
a •-D <i
UJ Z1- Op* p^a <nB Z
UJuj zUJ M
</> O
. X
.SU
MV
EIG
EN
VE
CT
OR
S
OF
B
J Qx z• <
CO• </)
< Ul3
Z J0 <
w z.- uiij oUJ «a uia
UJUJ t-_l 3m a3 ZO Oo u
SY
MM
ET
RIC
M
AT
RIX
Ula<
in»*--•
z -> co. •
CM •• XII ~ II •» *-
1 NP K
o •> o co <o «- o - - n z-># — + + • » o
x Z _J * * U l|II O II O M II — I >* a . j a _ i * c o H Z
oo
AR
E
RO
OT
OF
EIG
EN
VA
LU
ES
. T
HE
R
ES
UL
E
AS
SO
CIA
TE
D
EIG
EN
VE
CT
OR
S.
~- 3 T> 0 KZ (0• V
Z U. CD• O
X Q• W id
CD _J -i- < Ju a.z o -uj a H.o a _i*« •* oUl U Zo ui uj
a orJ a< ce uju o a
u. <
*•*
J
CD«rt>
I/)
CO<otapt-ao
Z (A• o-• sII 0-> •
p4
0 I)
-» +• TO .J «- OII 0 II J II_l O _| x .<
op4
z z* *
f-tf --I
M IIn M
in inM p»
** **
C 0O 0
->_JX
*^Jta.X
« II+ *•%
^ v^
II s.
X CD
mM
«•>
p^
(MSP4
ta^
*
*3D**
#
<
*UJZM
(Xa
CMX- z1 •
ta* PM
* II» —(tw 0
CJZ - 0or uO O CMU. Q Z
z•
f* **II --> 1
M
o ^CM *- z
IIo -Q Z
U VJ U
186
M
+»%
« O1 •1 O— IIZ JII ~-1 X
z•
.M
II^oM•4
Oo
+ 7- wz zII II— MZ Z
(MZ
**<**^»4
Z
CO
•••JXuJX
z ->• •
~* ««II II^ ••*
0 0t*> nx -<
0II O O_J Q Q
„W4
|
I
1 *M ZII IIM (VIz z
z•,*
MO ^•o o
4 -» «*J -1II — OJ < 0
Z -•f +2 ZII II- P«Z Z
N2
)S
A
ND
E
IGE
NV
EC
TO
RS
O
F.M
V)
— uj a.3D D •
l3!X.•• > <z z —^* illX O Z+• «-• UJ~ UJ V3_l -~. UJ LU< t- Q
*» Q. J_l Z _J- O << U U
Z•
.4
II
*<
O
^—o
II OJ O
A
J
**<II
M »•»
+ l—
J *»II J-I X
IZE
D
EIG
EN
VE
CT
OR
S
U<:XXOz
zUJ •I -H- II
»•«UJH OD ma -z0 OU O
X
*
• ** . a— 4. - +(i — u ->~> - o ^ _)
I • Z - ~O T 1 O O + + <in i ^ n in M <M n
r t O - " > - * — - Z Z ~II II Z -J II II J O O
O « M O » - I I — O ~ < M * - M I IO Z O Z J < Q Z Z < - ^
187
•
•
0J^< •-»* >-» z >
Z Z - (fl Z 3• » < ~ • (fl
— ~ -f H — Xu u > a M —~> o •« z o « *• 3 (/) «
OOO !rt Q 0 <Z«c ii N -, u u co - ii a> - « > » < + > > » * + ~ » 3
Z .J Z Z * * 1- OO 3 O I I 3 3 O H — U i Za v ) O . j ( f l ( / ) Q t t x a u J
o in or- N oo
uM
aHUJZZ}r
10
_J
UJa<u.o(ftOfoKuUJ
2UJ0
•—UJ
Q2<
toUJ3
I«J
Z >uj zO UJM (£
IU Nrf
Q UJ
UJ UJZ V- X<-< 3 ***i- uj a a:3 (0 2 »-0 Q O <a a u zCD Q:3 oifl a
«»>z•z•a•<«»>2UJOMUJoJ_J
UJ <O (J<t/>3
2a •M UJ
t- U. 10< O «U B3 J Za < zZ Z ~)O O JU O Q
< U2 -M Q Q
UJo z o:UJ M 0
^ ^»O Q COa uj -•h- a(fl O (/) -~uj j a toQ UJ O UJ
> • 1- 3• uj a (j j« Q UJ UJ <U Q > >« uj a z z aix a o uj ujt - < OOOUJ O — i- ZZ (0 Z UJ UJ <Z UJ «-> 3 Q U, (fl <to (fl j z o <
a ~ < uj v>UJ > U X UJ UJ1- X Z (fl ~ O OUJ - uj uj cr z -z a o a t- uj a< K ~ < 3 t-a: < uj z z o << Z M UJ Za >- t- (f>
-I Z < 2 li.U. < < < UJ OO Z H X t- Z
- _j « _i < orZ O 3 a 3 <fl UJO « I/) K (fl O» a uj < uj z ai- o a z a - oa- i i tau < a z(flUJa
0zfc*J_j
UJ <fQ U
(rt 1- Za o «o zh- au a <UJ UJ UJ> uj a2 2 0 .UJ <o a« *. jUJ -i
Q J £2 2 (fl< O
^*(fl (fl (flUJ Ul 33 3 ZJ J< < K> > 3Z Z COUJ UJO O Q« M UJ
UJ UJ Z •*O UJ
UJ UJ « OK H (fl Z3 3 Z UJa a uj 3z z z o
uj o o M ujO U U Q (rt00
K O —3a2
1>
^
u u o o u u u o u u o o u u o u o u u u o u o u o
188
v O N a o o * o « 4 ( v i r o * m o N a o o < O ' « ( v j i r > ^ i n > O N < D O > o « * < M m < i n t O N a o 0 t o - «< \ j f v i { v j < v i ' 0 f ) r « i > r o i ' > r o i ' o n f > f ' > ^ * * * * * * * * < i n i n i n i n i n t n i n t n i n i n > o < 0o o o o o o o o o o o o o o o o o o o o o o o o o o o o o o o o o o o oZZZZZZZZZZZZZZZZZZZZZZZZZZZZZZZZZZZZUJ 111 UJ 111 UJ UJ LU UJ U J U J U J U J U J U J U J U J U J U J U J U J U J U J U J U J U J l L l U J U J U J U J U J U J U J U J U J U JO O O O O O O O O O ' J O ' J O O O O O O O O O O O O O O O O O O O O O O O
Uj UJ UJ UJ
•*•4
IIuQaX 2
111 Xo «< ora Ko <t- z(/)w (/)
O« Zor o
X1?Z 0> o</> -I
J UJ< zUJ <or </>UI UJCO I
h-I-\n z3 •*T
UJ< CO
X t-M 0
or z1- Z< <z o
J ^<Z XM M
trt o a¥ *•* Ha or <« a zzUJor
UJ UJ
oUJaM
3OUJaUIz<or0ooraCO
1/5
zoM
^»oz3u.
oz<
(/)
UJzM
t- aJ3 ZO Oa zCO3(/>
U J U J U J U J U J U J U J U J U J U U J U J l U U J U J U J U J L U U J l l l U l U U J U J U L u U J U J U J U J_J (/)
5 UJ Z Z— N I iiJ iUv- Q H in z z
Q < z a t- dj ujIJ Z < UJ • Z Z</) O » - » -t - U J K Q O U -• ( / ) <<a i z a. oi « zx j H h-< h- o < ori /> • uJ^- <( />( / )Q < K X -- x t-tf Z (A U I/)U (/) <X ^ZZ
• _l UJUI O I-K (««'-Q<» O CK U </> M 3Z Z O T ( V J 0 . • S Z ^ - ( / >< « - \ o . m t \ j z o : O Q
• 0\ •- OJ X OZ LLi O <- Q < - _i z -o zcno z u j c o » ( / ) * - • -0 3 > » Z 3 « r t - K • - •U O C O ^ » - O • U U 3 » K< u . c t r t- Q x, LU z O i ^ o r- > Q O 3 Z O T 3 O T Z O
10 uj >• o ui — a -> mow><K t tX ( /> Z 3«Qf B • - < B ^ - • U J O ( / ) ^ >
t / ) O U J t f l > J O U Oo a u i z «z • eo ( n Z HUJUI X O X 3 Z - 3h- t- • • t- a • o - i u. a< 3 - i / > UL or Q t - ' i jz a t n z u, i o zo— i a o a Q H z LU u, < zi so ' j j t f ) u j • ow oa<• - O H Z> X QJ3 > - Ia 3 o o o z u, z a r oo u i a z « z o r w o o «
oz< to uj z ouj »u.Uiino a o oror < to LU z co m ODo « o > - » u j • » o > « a z <X J U J > > U J W Z Z O H U J O » - Qt - _ i _ J z c o » a « z 3 > « «LU a < - • z o o en uj o co 3 oZ O H * z o o j z » o r a : z — z t -
U . — • > - _ J J < ( V J O Uz o z a i / >3a » X U J Q : — U J J O Qo z « x • <-• o u. or w> aQu j ^ I O T N U J« Z Q O < - » u x » o i — a o>- < 1 ^ — UJ CO X < O Q 1- UOZ< Z 3 T Z " a u t O O U J U J Z <N 3 o » u j a a - ^ ^ z j o r j < xN - U J U . U , o » x o < z a c o uJ Z _ I - — U J Z B - - 3 •< ( / ) > - > UJ — _! Z (/) K LU O LO LUZ Z Q B Q - ^ Q 3 H " • ( / )O J Q N OO O O < 3 _ | Z U 3 Z « C O< J > I « UJ O O IU UJ Z - « U J 3 Z » H
o < H t f ) zz o u x a r a z o ^ eo v>Q M > L J * « — o L U o . u < > - ' O < i O 3x a s c z x H « < z t - m i - i - yl _ 3(/ j — < U J U J Q . 3 U J Z *u j a z U . H _ J x a o i a o r oz a ui « u i/) 21 t- < a i- u ^ -o
(0 Z 33-< o(/) 3 Q
O O U U O U U O U U O O O ' J O U U U O O <J U u o o u u o u u u o
189
g3•
ia
r o * i n < o N a o o < 0 ' « < v j f n « i f l v o r > »o o o o o o o o o o o o o o oz z z z z z z z z z z z z z zU J U J U J U J U J U J U J U I U J U J U J U J U J U J U Jo o o o o o o o o o o o o o oU J U J U J I i l U J U J U J U J U J U J U J U J U J U J U J
Xza§**oz<zaozwinzaozj
X <« za «>- u.Z 0
z> 4^wH« J
K 0 <Z ~ 0 «-uu • cvj »-o in • *^•-< (vi in z
• 0 M 0 MUv O Z Z O • OK - • » + 0 + U J< « — a <\j o >-a -» ii ii • • u 3ID - - > Z « « 0 ~ - 3 aZ 1 4 + M •» |l Z ZU.1 > Z O O O O — I ' » « - Oo X I < M I - ' < \ J » - ~ > « ~ - » » - u
--II II |l — -^ - ZU , 3 O O O l w u , » * OM M Q M O M I X M { ) C U
o in oM - C V J
oo o> o •* w too o o o o oz z z z z zUJ UJ UJ UJ UJ UJo o o o o oUJ UJ UJ UJ UJ lil
**
of)• M
in \o ro o z z • •>+ • • 0 1Q M M m ->• u u «
O w T -» ->II -> -sr in in i +QC CO f! 1-1 •-•O « IIZ O 0 U, << Q Q M «•
m oM n
<*ozUJoUJ
.•»<•«^»
#«»<««^
+zaaz<nzQJ0z<
inozUJ
UJ
'JL!
ZM
t»
Zouinf>
oZUJoUJ
o•*•
mo-»*
ino••4
««H
ZQCOZ<«*•a.^^
fYSQU0
Z
8u
^(Xoz<wt-£O10o*oo+o<*•M4
^
•
•
II
aoz<otf
00/v\(X)O
UJ0
UJ
^zwf~<0Ju.xNOo1
QO•
»*
*za0zIIXza:z<
^ O
IGE
NO
E
IGE
NO
<
UJ UJ
trXK
0•JoX
UJaXt-
UJ
5az0uQ•z.4
(ft<Xot-<oM
oz**
UJN•4J
1—»M
z»•«
-« (vi ro «f in <0 NO* ^n ^ ^^ ^n O^ ^ho o o o o o oz z z z z z zUJ UJ UJ UJ UJ UJ UJo o o o o o oUJ UJ UJ UJ UJ UJ UJ
/—z,.*
.<aJ
Z li.a: xo aZ X
O < k- xII II II +Q a cc - _iZ X X II |l« K >- J Z
in ojn^ in in
«J u u u o o
190
^ 0^ O O O O O O O O O O •* *•* ** ** ^ «•* •*• «^ *4 v* fVj (\j (\| N (M fVJ (M f\| CNJ ^J fO fO fO f)O O ** ** *•* ••* ** ••* *"* ••* ** ** •* ** ** ^ ** ** ••> »* ** * * «rt •* ** * ^ ** ** f* *+ m* v* mmt *4
zzzzzzzzzzzzzzzzzzzzzzzzzzzzzzzzzzzzU J U J U J l J U J U J U J l i J U J l i J U J U J U J U J I i l U J U J U J U J U J U J U J U J i y U J U J U J U J U J l J j l l J l t l U J U J U J U J
l i l U J U I U J U J U J U J U J U J U J U J l U U J L U U J U J U J U J l i J U J U J U J i J L I U J U J U J U J U J U J U J U J U J l U l l J l l l l i l
*XIoo
oV)Q
tooo
ouoz
aou
N CMX X~* »NZ J1 1» *Z J•w «»
II II3 3Z J
O>o
o
•*
4i%
ax.Ki
—•zJ<^
3 (/)Z OD4 <J 0II —Z U.J -
(MO
MIIozM
tovO
3 3
4. ^J ZII IIJ Z_! Z
Zz<1
J<*»«o0
*oiO•oIIX
*zJ
aoi/)QX«*jji&<\II>
(0*0
toN•
tON•
ON
r*X >•~ 1U. II
oN
XN
Q' 1
)*0
0+
O«
2
** Mt- l/>
a: *o x(/) ZQ 1-1X tft> IIII (MX XZ Z** MV) I/)
toN
XzV)
0ooo•
V*
w
Ha3t/>QMXV,au(ON
X</)0u
*Xl/>ouM
CMXt/)o
Xtrtou*XzM
tf)II(/)uzM
(fl
zz
ouzo<
JUJ
<Koa
I I II
oCO
in»4
CVJ —X •-> o~ 00I
tOo
XCrtou
X »z -•« z(/) M
* w— <z *— X— z
* *z zII .113 3J Z
10 * _lI- I
O 3 U.
Z ZI *M M
«» II
lO
• X *O t/> —O O J- O U —
- # —
II < —
tO Oo —
O (0
o o U O
191

zzzzzzzzzzzzzzzzzzzzzzzzzzzzzzzzz. zzzU J U J l i J U J U J U J U J U J U J U J U J U J U J U J U J U J U J l l J U J U J U J U J U J i y U J U J U U J U J U J U J U J I l J l i l U J U J000000000000000000000000000000000000U J U J U U J U J U J U J l U U J U J U J U J U J U J U J U J U J I i t l U U J U J U J U J U J l U U J U J l U U I U J U I U J U J U J U J U J
oCM
in
* T+ +o oJ Z
xMoo*
X —2 at" Zm ~* «--» aa +z x-4 Z
a toi *x ~tn ao _)u «
— aa M_) ~M. a
in *o ~z z* 3T
-4^0:— u, _»< -4 MM
a «x a
*X UJ OII 3 O
— Z 0a - aj t- ••• z wo
*MX
ou*
CMXZtnCMX10ou
z_1V
X <+ +(M I/)x um za —u in* *
3L —Z Z
— z< VCM IX ->Z J
10 •—'* <
•• « .*
in o-• w
~ ~ O H IIa o x .»•
in
u_i -— z< uu wX <
XIIzz
UJ
azouaou.in(OUJ
zzr>_)oot-tn in
z -aou.
tnUJ
z.z3JOuKw<Jzoau.ozouUJin
zaoz
zli.z
m
om
in
ovO
inm
o•o
in
zizwu.
«4
•fzIIz
o<0
oK
oo
a —o —U. —i(O wUJ 1t- J
•u.
_l
•fJIIJ
mmoH>co
1ozIX
**u.•<
oIIo2MM.
oinoK
oo
in
in
• oin x
-5X Kza uj'*. ai aa si ot- O
o inm n
om
o o u o o o u u u
192
ZZZZZZZZZZZZZZZZZZZZZZZZU U J U I t i / l U U J U J l U U J U J t U U J U / U J U J U J l l l l U U I U I U J l i J U J U JO V 5 O O O O O O O 1 9 O O O O O O O O O O O O O V 3
U J t U U J U J l i i U J U J U J U I U J U J U J U J U J U J U J U J l U U J U J U J U J U J U J
uaJ>zdJ
UJ
oz
tou
If)CO••4•inCO
~ n
EIG
EN
VA
U
t_oro(0
z
u
mZ 05i -u0 O"- Q
m-0
CMV
1
2 «•f ~<3 *l-« «-"
II II0 J« J
2*
N II1 ->
Z in# COz -II0 C-> o
1
*z ->
* —o +•> ">II IIb z-> z
zz
1J ~J -1< "^^ ^u. \\
oN
mCC
m*» N
z ""
< X —II II 1.•»•••.>-1 Z ZJ Z —
— — u.
z
II
+ ^o o ot) »^ - n n
y. aO J ZQ « «
•>nN
o:
*» cr xa. it n_i •* ~- ar or- _J Z2t ** *^II ** *x a a
o10
UJ3Z 2- -rr*• 32 t- £Q U J
u or, u
in9
uUJr «u
2 "^
!*• •—DO UJor K
3 CD *•*r D orU (/) B
< •
CH
EC
K
t- 2< a.Z 3a t- QO UJ 2u. a ui
—
193
uUJu.u.
(0 UJUJH O< Z
a ao <- oao aa zi- <oin cc•-> <Z 10< I
inauj m
S U< «-1 Z
Ku,o o
zz «o a~ UJK Q< —a in0} ZM a> u
oft
O <*
O CO
• UJ
^ u«- zen <z za o
IME
NS
ME
NS
l
Q Q
CM
CMCMUJ
CM
5-CM
CM
+
-
UJ
Zoin2
X.
Cl
M
-a
*4
a>zo
[ME
NS
l
°
•*<\J
M
•
CM
m
o
CM
CO
o•
<tCM
mfMa
-CM
fO
a
a
zo
[ME
NS
l
O
«CM**CM•••»-
U
<M
CM•*K-au•
CM
-1-
u
CM
-
auz0
tME
NS
O
ET
66
(2
4]
U
<tCM
99
1«
D*I
CM
ro
h-
<j
CM
H-au
0
inzUJzQ
[ T
26
(2
4i
U
CM
I.C
RT
26
1
CM
•O
1-
u
CM
0
a.
zomzUJzo
•*CM
tf)
U
CM
,CR
T4
5(
CM
<*
o
*-ctuzo
ME
NS
l
Q
CM
in
U
^%
(\J
4)
auz0
[ME
NS
l
O
AJ
3 CM
Z *» CM
Z -
• 4 GOCM * *(\J *"1 ^^ *t
* vn « cvi
^ m >» mw <( «•*
j c ar Q< < a <a ct u. a
in
•*•oU-in
za
u.CM
IL
fO
ozUJ
IT)nina<a:o
«t
»rt
li.
3R
MA
T1
u.inro
-.
II
Oa
-X
w
z
vOninQ<a
o•o
u.
)«M
AT
(
U.
n
II
CMcyUJ
i
•4
II)
«
CM
aOf*
ta-i
-aUJ*>
N
ino<a
toUJ
JR
MA
T4
u.
N
Ml
*
«
•
a
*
«CM
a
sino
a
ou.CM
JR
MA
T
U.
n
t) ,
GG
23
( 1
) • 1
=1
1 .G
G1
3C
fM
CM
«
n
*
-cva •*o •— oO UJ
in t-
0 X.< aa a.
0
inH2UJ
ILU.UJOU
inzUJoQZ
za
amin•uzu.u.t-in
UJ
uj
o o o oII II II II— ** CM W
2 « a —< < < <z z z zin 10 in in
u u
194
o o o o o o o o o o o o o o o o o o o o o o o o o o o o o o o o o o o oII II II II II II II II II II II II II II II II II II II II II II II II II II II II II II ii it n n n
m in
Z Z Z X 3 F Z X Z X Z X Z X Z X Z Z Z Z Z Z Z Z Z X X X X Z Z
195
. •0 0II II'O *0O £a «-o oz zU) W)
•oII0azIrt
•oII«4
azU)
•oII
CMaz3V)
ar.t*COinn
o*in•*4»4
•nH*••a
i
uM
Oin.4
Oo
l*V
R2
l 1
«
CM••*
T
1
•«
_
•4a'XInIX
au
(1
)1 I3
9*( i
I*V
R2
1<
i
CM
tr
i•«
•«<^OfUJn•
u
•*CMa>*-CM
ai,*
CMCMaUJnCMCMau
CMCMUJ
*
CMa
**4
CM
at
1•
»4
CMCMaUJII
CMCM
O
«>**>4
CMoc
*
CM**4
ai~\tad
^*
CMaUJ
CM•4
anCM
au
>*V
R2
1( I )
)*G
E2
2( I )
>-V
R1
2<
«
\
CMCMZUJ
CM•4
or>nCM
au
LTA
)*C
OS
( TH
ETA
I:T
A)*
SIN
<T
HE
TA
)rH
ET
A)*
SIN
( T
HE
TA
)
UJ UJ r-r T -X ^^
*•» w Q
in 2 uo « *O V) ~»* * << < UJ
• KHZ0 U UJ t-
co n CM «- i/> z u- CM - a o <- *<? y> o # o (ft •••o o o — # # <« JL ^ fe^ ^HK. *W W ^ ^ ^ ^
r o f i r i f i c x j f N j C J l X ^ ^p - * - * j < V — — 2 K » - 7 )a a a a a a c < ^ ^ - oO O V ^ O O O I I * / * 7 UII 11 tt II II II < O *-» II< * ^ m i n > o < o i - < J ( / ) ~^ • ^ L O l D O \ C U J M II </)a ^ c t ^ - t x w X ^ * ^u u o u u o » - u ^ o
" H
ET
A )
*C
OS
( T
ME
T A
)
r-
&*H"UJ
z10
*«*<Tl
*,zM
</l
IIu<n
rHE
TA
)*S
IN(T
HE
TA
)
r~
^(/)
*
UJ
to0o*»•><n iIU
.«.I/)ouIICM
CMU
<
UJzt-
0u*
1 1 1UJ
H•**if)
ouII
CMU
Ip.
UJ
z</>*_7*JT|Z»-«^Ztmt
tf)
II
CM<n
<
^^Z
«/)*
111UJ
t-»r
(/)
0uAu
>6
)*C
2S
2*-C
R2
2*S
4'V
CM
CM
•CM
U»
II~**«*^_i*4t-au
1
V
CM•fCM
M
CM+
U
*—
•»M
^«
••4
•«
O
zoK-
/v
NS
FO
F
<a
UJ>-<uIM
U.u.UJoo
:R66 )
*C
2S
2+
CR
1 2
* 5
4
\s
iCM
U
u*
II••
•-«•?CM*4
ao
;i6
6)*C
2S
2+
CI
12
*S
4
>6
)*C
2S
2+
CR
II*S
4
s/ >w» rytZ
•» *1 «
CM CMCM +N- CM
•»• a•4 t J^ w•4 >M*
fc— »*** W
U ••- CM
U U
* *fVl
— <Y
u uII IIx» ^
l-< >-•<« «*
CM CM— CM^ au u
U U U
196
,*C
I66
)*C
2S
2+
CI
1 1
*S
A
-2.*
CR
12
-2.*
CR
66
)*C
2S
2+
CR
66
*S
4
• 1Al A. IC\| »M
* Aj*>l
Al (VCv I*.
- uM *<J •*
* a• u
CM **
* *^ *U U
* *CM >OCM 'O- au un u
^u ^5CM *0H- KM 2U t,>
-2
.*C
I12
-2
.*C
I66
)*C
2S
2+
CI6
6*S
4
I*C
3S
1-(
2.*
CR
66
*C
R1
2-C
R2
2)*
S3
C1
1 "j\j ^—Of ^
ftj •**V ••M / yu>O O+ 1^rf Ml•" CM
-« ao o^^ ^
* 0t ^D
U (X* u\o *o *— CMU •*II II
vO \0*o •*l» H>« (Xu u
»4
to*
CM
uCM
u*•CM
-4
•nu^
ui
fM
M
<0>M
U
*•CM•II
O94
.to4
(J
U
to*
M*
*U
CM
a
tO
tr
*•CM**
»
(VI*>J
CM
•f
IcITtj«•
CM«»1II
•6CM,
gjo
>l*
C3
Sl + (
2.*
CI6
6-fC
I12
-C
I 1
1 )*S
3C
*A|CNJ
i**u+irtV<oi_iu*•(M
**1II
~OCMt.M
y
CMtoirtinina+(MU»<fr
ajju
tf
i_Qr
U
CMtoirtu)in
CM(J
*«
•HU»
^l_>^u
tou4fr
trui
tou*inmauu
in)_Q;(j
toU
2
1tou*If)inM
UII
m^.M
u
CM10
<taw+CMU
*in(xun
i\flQT
y
C M X Z Z Z I Z Z Z Z Z Zto i i i i i i i i i i i
* * * * * * * * * * * *< H > « M M ^ M ( \ | l > 4 ^ | M ( > J M ( V j M \ O M > O M t O > * l ' O M
+ z a z t - z a z « z a z « - Z ( r z « z a z » « z( M ^ 4 M < w < * * < M > < « < < * * < w 4 « * < M 4 t « *u * < * < * < * < * < * < * < * < * < * < *# » * - » * * » * * » * - % * * » * - » * - » * « » * « * «l f > M ^ < - i ^ i - i ( M M C M M C M M C M M \ O M i O M t O M O M
l f ) % « V M « ^ > « * ^ > 4 * * v « « » ( M « » ( M * * ^ ) ^ ^ > « ' x * s * < > * > ^M M g ~ « i - i C M ( x c M ' ~ i C M a c M » r i i O t t < O k * \ c a < c > ' « oU . « 4 « 4 < « M < _ 4 < C M < ( M 4 ^ < > 0 4 > * 4 * M ^ ( Mn ^ - a » - a ^ - i K a t - i > - a ^ - Z H i > - a . K * H
a </% h^ /A (Y i/\ brt (A 3f (ft brf Irt fV (rt M irt *V lA krt t/\ fYV' ^^ wl ^L v) ^^ VI hfc VI ^* VI Ub W ^^ VI h*. tf/ ^* vi Lfcb^ 1 1 It 1 1 II It II 11 II 11 II Ik II II II t 1 II t ) II t I ll 1 1** J \J II W U \s M ^ " W II \J 11 M w M w M W II \J
H^ II _A II Kl II M II fVI II A.I II lO II ifl ll irt II *rt II^ II ^ 11 *>l |i »M M 'V M v\l |i *J ?i «fc/ 11 *W l| "*.' 1'
tO M* «^ ** ** fW ** W *•* A J * J ( N J f \ J v O ^ £ ^ 0 ^ ^ ) w ' ' t £ 9 * * * £l O ^ C t ^ ^ ^ K ^ ^ ^ Q C ' C M ^ ^ O f X O ^ ^ d ^ ^ C N Jh - c r < i - » < t x < M - < t t < » - < a < « - * < ( X < « < 3 :^ < z < z < z < z < x < z < s < z < z < x << J < ( / ) < t / ) < ( / ) < ( / ) < i / ) < ( A < ( / ) < v ^ < ( / > < V ) <
^
z•
^<0 Mf\J ^^1>J >*
0* Z< «-'< ** —(O M
CM vX >0< CMZ Hto N«II I )II W\A ii"** 11M <0a CM< M
z <to <
197
z*
r* r*r*
i* r»x*
x*
x*
i*
XI
XI
XI
II
XI
XI
XI
1I XIII
XI
XI
XI
XI
ri X*
X«I*I*
X
*
X#
X
*
X
*
X
*
X
*
r«
<\J «- (WCO (VI CD (VI
ZM (/) X V) •>• )/)
U II U II U IIII (VI II (VI || (VI
198
o(M
O0)
X
~X
f*
#
*
r
z
Xi
*
X*
+
i*
- —« »
z
X1
+
*
+
X*
- — <v
z
X1
+
X
+
I»
»*
X
Xt
•f
I»
+
I*
N —
X
X1
•f
I*
*
I*
<v —
X
X1
+
X*
-fI*
N —
X
X
X1
*
X
*
X«
•o —
X
X
X
+
X*
+
X*
•o ~
X
I
I1
•f
X*
*
X*
\Q M
X
X
X1
•f
X*
+
X«•
0 «
X
z
I1
+
X» .
*
X» t
tf — vfl X
-
X
1
I
_
-X
"»
X*
s^
N*
X^ < \ J « » { \ ) « - » < 0 » - i O » * * 1 " % - ' " " ~ * < \ I ^ Nr t r i - x a x — x a r « - x a x « x Q : i « i a x « ^
.-O — O — O — O C M O M O j ) Q O Q — Q — Q < \ I Q ( V JH - z * - z > - z * - a . * - z . > - z * - » H X * - X H Z * - * > -
IIII U— II
II U
— II
II OM II
II OW 1!
ozI/)
o-Z O
o aZ O
o-Z O
c aZ Q
U It VJII (\J II
- o aO Z O
UII
M U«O !!
o aZ O
DZ
II U<0 II<N >Oa <MO'-'Z Q
a * o •+•+ -• a -(M X * I_ _. O ~
o * a *z - z *V)
- •»• Ma - aa ~ a* r +« », t\ja *
|| .- V) — (/) ~vC O II O II O
az aDV)I)
a o a — a: M- n a no o z -z a o aW a w) a
a.z3 aen a
az -D aui <
oin
— (V •>/ (V_• ^ M f\J
— a •- c< < < <
z z z z z< / > « / » < / ) < / ) ( / !II II II II II— — (VI (M CVJ.— _< p- ~ (\|
a - a< < <
199
(M*o*oo^o*o^^^ininio(\j\o\o»4>*(\i(vi4444ttnM a M <x M a <-• a — a •« a< < < < < < < < < < < <zzzxzzxzzzzz</)tf)</)(/)U}Witf>(/)</)WJ<rt</)II II II II II II II II II II II II^^ ^3 *0 ^O ^D *4? ^D ^^ ^^ tO tO 10W ' O ^ O ^ ^ ^ ^ C N J f N J ' ^ ^ ^ ^ l OM ( t M K i - i a M ( r M a » i a
— -.-. — ( \ J ( \ J > O ^ ~ - . C J f > J • • • • • • • • • • •-
C Q C D ( D ( D C D C D t D O D t D C 3 C 3 c a X V X X X X X X X V X
• " » » * # » » * * * » * * a « c t « « a » - ' a i - i ( x * * a :z « *zzzzzzzzzzzII II II II II M II II II II II II II II II II II II II II II M II II
200

•ms —
CM z n- 3 SO rt (A f\t^f V* \M
z a * ato z in zII 3 • D*O to ^^ ^)CM II l| II•- O — CMQ a a a
</>>-zUJ14U CO•• ^IL VJU. UJUJ U.O U.O UJ
(/) oco zUJ M
z au, zu. <M O
Kco a
zQ <Z< xCO UJUJ Z— toHer utUJ en0. iiJO £a xa * )\^J I< 1-
a -<5wUJ ZH —4 /Ytx
Q
UJ 1-11- CO«4 Za aB O
•Xin•in•
CM»4
UJ••
II••>•«Q£CC•
•Xm•
in••* CMx ujo •• •M
-• II
a -CO -
• X
f4 •
< x inco •
in • 41• o •
f- nUJ < —»- z «M (X X
X O Q* U. •
Oin
•Xtfi»in•CM*4
UJ••
IIM
M
M
CO•
•Xin*m•CM
M UJ
*• •M •
0" II
«4 •*
«* M
M M
CD <
-J , -."• x inM CO •
< — o/
in • ujm o •
vO —*» >- |iUJ < —K Z -^
X O OB IL •
in10
»X(fte
in•
CM*4UJ«
•
IICM•*XCO»
»Xm*m•CM
CM UJM •
X •o• II
9rf •*
X XCD <
r\j • —•* x inX CO •< ~ cvO • Ui«o o •^j %-•^ K l|UJ < CMH Z -
X O OB U, •
O-0
»xtf7^in•
(M•UJ»
»
IICM•«MCD•
•Xin•
in•
<M
CM UJ*• •14 •Q• II
CM CM•* **>M M
CO <
<H * ~•* x in•4 Q •
< -» M
in • ujo o •
o **•» K IIUJ < CM^* Z **14 3J M
X C 0B U. •
IT.•0
v
Xtfl9
in•
(Mv4
IU••
MCMCMQ£
CD•
•Xin•
in•CM
CM UJCM •X •Q• II
CM CMCM fMX XCD <
CM • ->CM x inX CO •< •• rvO • UJN O *
& ++*•• H IIuj < CMH* z CM** X Xx o aB U. •
ON
»Xtfl^in•
(M04UJ••
IICMCMM
CO•
•Xm* •m•CM
CM UJCM •M •
0• II
CM CMCM CM
CD <
CM • -sCM x in1-4 CO •< — fM
in • ujN O *
•O -•^ • ^ 1 1in < CMh» Z CMN- CC 14
X O 0
* "• z.mN
,x>W
in•CM^^IU••
II>0
QJ
CD•
•Xinm•CM
vO UJ<0 •X •Q• II
•G O^ \0X XCD <
^^ * ^^^D X ^^X CO •< — (\)
O • UJCO O *
<3 —•** " IIUJ <* >0
*•* X XX O O» u. -
oCO
»
XU7»in•CM^4
UJ•
m
II*ookrtCO•
^Xinin•CM
\O u)<o •MM •
o• II
^ ^14 M
tn <vO . ~
«o x mM CO •
< - M
in • ujCO O »
•0 ~— t- uU,' < «0^ y oM Z -
X O CB U. •
inJO
„X
^in.CMUJ
m
n(Q
^XCO„
^XinmCM
vO UJV* »
a •a• no oM^ M
X XCO <
«O •
— XX CO
o •c^ o
\o *~^ !••
UJ <H SM orx c* U.
Oo
»
X
*in,CMUJ
m
IIff
^CO•
g.
Xin•
m9
CM
vO UJ•• •14 •
O• II
-o oV4 <4M >4
X <
~ ,0 •If) — X• M CO
CM < -
uj in •• o* o
<o •*•n — i->O UJ <-< f- ZX "-1 XQ X 0• * U.
ino
0 0 0
201
Page Intentionally Left Blank
zz ZZ
ry M» «* «z zz z# »CO ^M nX >-> ->
H — II fvjd —z a
Z'o «o +in -
zC IIa z
«\J 3 —z a *
z orO •-• 3O + ->in <M ii
z ao n 3a z -»
_lzCO <\Jw Ou in
* •*z oco in
O <\lo
j m
cr *U IUJ Z
Z U.M —
•OII¥z
uOJom
in0inot-oo
C\J
*Q.
*
*
II
^
U
oin
3ZM
Ouinoin
oin00oin
o
iz
u.M*
•OIIJz«Y\OU
u
>0oin
(Vl
**a**z
o> »o •tn rvj
IIO _lK Z
c «o o
COom
UJ
z_•t-
ou9/3m
3J
o
•
z*<uJaoUJ^^^Z«
•ritn•
*in»
CVJ
inf*
xiz
u.**
IIX OZ K
M au o(M^4
in
tn
li" z^ «z t-M Q
(j y
^ in•^ M
m m
•0•M
mCO
m
in^s
iz
u.^^
• *M- inu-1 OZ K
« ou oo4
in
in• u
li" z_j «z »-
- 0u uCO 0>
~* •*m mu o u u
J
u
o
orUJKz
o o o
203
CM(\Jm
CMmCMCY min • CM— o m* ii1 ¥ OZ Z t-ft *OU. « O— u o
CM<Min
• LlJO 3II Z
^ **Z H*0 Z~ cU U
<f ;nCM CMm in
•ocvinCO
m•om • M••* o in_i it1 -I O
w» \0
IL *•• C« u o
,0CMin
• ULJo oII ZJ -vO ZM O
U U
00 <7><M CMm m
Zin
u
zin
a0UJKzM
* Jz z
O UII IIX Jz zin inM M
U U
zta*
U
JacoIU
z«
Z 2
O UII IIy jz zG •&tat |_|
0 U
o
U
zo
U
J(X0UJt-zM
z zCO CD
<J UII IIX Jz z0 0M M
M M
(J VJ
znto*
U»
zn*+U
aoUJ
z«
Si J
0 UII II* Jz zn nM •"
U O
L
CI4
4M
K.C
I44
NL
OfUUJt_z••
y -Iz zCO CO
U UII II* Jz z
U U
O U U U U U <J U U
204
ro
u
Jzro
o
J-cro
UJ
J
o
z
\i— - (j
M Z
o uII IITz
Z x
O O
ro r*)
U O
oroUJ
u oII II
Jn
zn
*• zo •*J *"
J.
nu
Nn x•- zo *
z •-> «
z zn
o o
UJt-z
o oII M
Z Z
rO ro
u o
oUJ
zNn
j
uiizN
II _
ZN
Z - - MM U O o
-0
*C
I23
Nl_
*(
A/3
5*C
I23
MK
* <rz «o <n **- CMo -* X•G «M CDM «
0 <# +-» -J< Zx inCO CM
T oJ *z *<t zCM <t~ <MO w* O* »z <om <£>(M *-*• •au *£2!— o» no -«* oI «n *~ z— n>• CMT ••< ** O
C£ 4t 2X <O *~> CM 0^ *^ N
*^ O i
(/) * *
X
a>-<zCO3(/)
UJ» h-J <
1 3J O• J; <t u
tmt
VceV•IM«
Xav•tarf
*a>••>a>••»•3cr>»
ceVce>•9
aXcr»a z z» z zcr N • •>• » - -• » II - II CM
Ct Z •* 3 N D> z K: a j aa * z z• n o + o •«•
CC. Ct 0> •* O CM3 > * Jcr ™^ o ii o n> ~> o i: o _j
CM CM C\J# * *» * #z z zz z z* # *
o — M nM II II IIa a x a3 > 9 X-) ~> -> T
- CM
o o o o o o oXX
ooCC
0 U
205
CM
**Zz«IIV->
zz•
CM CM CM CM CM -• •«* » * * » •*. II» » * * * a -z z z z z >• zz z z z z ->ifl *0 N 00 0* M Oii n n n ii a: oD > * X > ~> O- » - > • > - > - > - > o
Zz»
v«-t II CMD CM D —a z a +z z a. . ^^ to* "^•^ *J *^ _ ;
•f O * "I^ O CVJ |lZ f IV4L. IX
H O M OZ Q Z ->
CI3
7M
K,
CI3
7N
L
_)<
OUJP"
zta4
CM0O-•
<too•
(MO0>
v>K1Z
u.M
•oIIV*XZNMMr*/
uCMOO
inoo«oH
O0
•0IIv/Jk•s.Nr^iU
•*o»
UJDz
fc-
CSuin0a
<ooo«•00oV•0o0***
1z^^
u.^4
•oII
zN1*)M
u>00o
o>o0
oH
oo
•0II
1^J
N1*)to*
u90of>
UJ3
t-
0uooo
J>oro
u•
*z*0(*)u-1<0UJt»z^4
37
MK
to4
uII^fz•0f>»^O
37
NL
1*4
UII
Z01*1
o
CIS
SM
Kt
CI5
5N
L
_l<3;OUJ.z
M
OJv^
o»
•^<0*•
W•0^^
1zu.»4
• ino —II O
Z 0in t-in« oU 0
CM-4o
o o u u o u o
206
* —a«
*z
COtart
0>
•
M ID a>II 3 -«v: z jx tart rm K ztn z —« o u.u u •*
o> o«
ca**a
*z*o> •
- ego> HO zK in
ino **13 (j
<0
UJ
Z
zouo>a^
-1mn
in
a.UJ*-z
(VJ
*<v
(\i in m
*» II O I' 3 -» II 0> II O-^ ^ ^ z j _, j z
n z -~
rww eg
m vON
CD
z
u
z«*rtftart
u
_J
aUJ
T.tart
Zinntart
{J
II
Z•4
<Jtart
O
_Jzmi*>tart
UII-Jz•rt
tart
U
Nmu
z»intart
U
_J4a.15ID
ZM
^Zinintart
UII
zNin>>u
J
zinintart
UIIzh.intart
U
ZM
Z(M
tart
uJ
"Ct(Ju;ztart
*ZNntart
UII
*zCM
tart
U
^J
zNntart
(J
II
-J
ZPU
tart
U
u u o u u o u u o u o
207
Zn<t
inJ
24
-1m(M
-1n 0
nu
J
CM
43
MK
to*
U
J«fIXoUJHz
^ -Jz zK Nn nu un u* _iz zf) "1•* •*"f . *r
Z -mtart. .
OJ •a.oUJ^*z
0 0,II II* Jz zm m•* •*to* to*
Z'
ta*
o-J(XoIU>-z
ain IPf) f)
0 UII IIX Jz zCM CMv* —4
•* to* .
X
Z'
CMto*
U
JaO'Hi
z
zK
MuII*zCMto*
J
Nf>
UIIJz<tNto*
Zm(Mto*
U
-1aoUJ^»'
z
* _)z zN Kn to-te* ta»t
O UM II* -JZ Zin m(V fMto* ».
23
MK
N«
U
_,
uUJ.
z•- UU <-• UO to . UU -*
zi< J O * J
'Z z n z zin in to* tn mc> n u -n in
IIun
z zn nCM
aoUJ
IIu,|i
z zo on
u u « ** utart tart Z *-t Nrt
to* u
zCMCM
.•-J
a.UJ»-•
U U o u u u u o u o u o u u u u o
208

X -1X Zin mn n1— M
U UII II* JX ZCM CMCM CMM M
(J <J
J
Z
CMIX
U
•
X
CM«•(J
J
crOJy.zIX
* _)X Zin min mM 1-1
o o«X ZC^ (7*CM CMIX M
<J U
J
ZN(M•*U
•X
NCMM
U
J. - < -
ao(U
Z
^0.*
COIt*%«{vo«•»
*_J
2»0nkrto
. *
XK.hi_i0
*CM•aa
* J COx z nN N «-f) 1*) ZIX IM 3
u o ->II II »X Z >•N N ->CM CM n«x 1-1 «•>u u m
_»zK»*>
U»
*X«O
•n»•«
u*>o<oOf.00•VJ2mm«xu*¥XmroixV»>oCMau*•rt
6*C
I4
2M
K*C I
43N
L 4
6*2
6
W2
*A
*8
*P
l*C
I4lM
K
(M 1(X JCO Z4- -.J «Z -K Um «•* xU X* K* inX M- u* *- <0
4t Q£
CM CD(M »CC •»m <* x<•* COCO ~X -f
ialII (M•» ^tr —
- > u4> 1 #a • X. j> or x z*i > n •<ii ~> & &a ~> •• ix> «* o u~ > i / > # #
-> CM
22 *
AR
55 *
C 1
1 2
MK
* C
1 1
5N
L
^*<+-1Z(M
IX
U
*XXin•4
IX
U
*in*cr<»(M*^
^00II*^(X
•rt X »rt
4> " 4>
* QC X"1 X ">II •> IIor 1 (x3» «^ X"J </) "1
6*C
I30
MK
*C
I 2
3N
_+
(A
/B
)
*B
*K
12
* A
R4
5*C
I23
MK
*rt) <{
a +o j» z^ in< CMX -CO U
** *4> ^«J XZ ^«/ (\J(M >—** OO 4fr* V0
^ \0x a!\J -f- J
* 0CM n•rt *x
0 #M ^** XZ f)X CM —T "rt 4.
ce * z xV \C "1 1•> CM CM n^ QC ** OC•* O U XC/) # # "5
- CM
OR
26
*C
I 2
7M
K*C
I27
NL
*(B
/A
CI 2
2N
L-
W2
*A *
B*»
2*C
I 2
2M
K
« *• X
CM X+ CM_l CMz «f> UCM »M inu m* orx <x *CM CMCM CM•x XU ** mCM *f\i <a *a ^* z— CMX CMX —w *II *a o> CM"1 !X
a * zT <0 CM"* CX **•• c utf) # *
-H CM
II6
*C
I55
MK
*C
I35
NL
*(
A/B
)
m* -.— _i< zS N03 O«* ix+ U
-1 *Z *vO Xn >oM «
u —» u* «X <0
m —M 03U +» J
M in•x mCO •*
T *II ^— X~ in
•* 3 •*)4 T «x
S a V-n -> CM3 ** CO">( / !#
•<
I26
*C
I42
MK
*C
I43
NL
+B
I26
CQ A
irfz -S *m —•"" Uu ** ^^ XX N- in•* —M U
U ** vOCM OCM —M CO
03 »* ->"* <CO XX CO
— rt>T zII CM
— •*IX IX
•rt > <J «•
4 n » 4
> tt X *-> >• "1 TII ~> <t II
> — U »->< / ) * n
-rt
o u u
209
I45
*C
I 1
5M
K*C
I12
NL
+A
*K
22
*A
I55
*C
I12
MK
*C
I15
NL
)
<
*
-^*CO
1II
"-*»ay•>^,yj
25
MK
*C
I24
NL
+(8
/A)*
OI1
6*C
I30
MK
*C
l23
NL
+(A
/B)
M
u*(VIrtM
O
1
II•~
^* X
M •
X 2-> >•II I
*"* ^
X ~~) y)
I66
*C
I24
MK
*C
I25
NL
+A
*B
*K
12
*A
I45
*C
I23
MK
04-
Z0roM
U
*J£
Z
(VI
(J J* z<O PICVI CM
o u* *— rvt
I22
*C
I22
MK
*C
I29
NL
+2
.*D
I26
*C
I27
MK
*C
I27
NL
4-(
B/A
*B
*K
22
*A
IS5
*C
I22
MK
*C
I22
NL
)
0 <* +•^ J00 ZV (V)< CVI«« 1-4
- (J1 *II *~ z!•* Q\
•« y (VI•f I *•M • O> a *-> > -oII -> <O
>• ^ o-j tn ».«
ooc*
3
X
3
X
3
3
3
a
3•
x aM X
a MH 3<t *
Z £
ffl *3 -"<n 3111 fVUJ UK >< "*_l 33 •u aJ 3
(J 3
zz•
CM •"* II
* —
Z* 0in oII 0
3•> c-> Q
ZZ•
**II- CVI (VI3 _J "^
a aZ 0 Z« o —+ o +— — (VIX -1II O II* a _!
CM
*zz*o -
II IIa a3 >
zz»
.-1C M C V f C V I C V i C V I C M C V I C V i — II
* * * * * * * * + « «
Z Z Z Z Z Z Z Z 3r z z z z z z z - > o# * # * * * * * ^ oc v i t o ^ m ' O ^ ' O O c j ' n on n u n n n M u - -a a c t t « t » « - ' > - ' * - 3* x > 3 > » x y - > o" 1 ~ > T " * T T " > T T Q
Zz»
MII
— CM*~i J^W *-az o•"• O+ owrf «M
zII CZ Q
(VI™^ jw *^0. +z a>- 3^ -^(VI I)z zII 32 ~>
(VI_) 0z o00 -M »
u t• o
y: os. -CO •«-• CMU O
J -ct ^0 1UJ ZK "Z U.M •-*
'
\f)
• oo —II* 0Z K00«- OU 0
(VIoo
o o o
210
M*K
*P
I**2
06
t 1
00
8*1
00
6
* 0• UJ -
(VJ -3-*>
II Z J* M |Z K Z00 Z ~•" O U.U *J M
«* 100 0o o•« •<•
0• oo •*IIz ZCD- oo o•00o»4
N*L
*P
I**2
*• uM 3 -.II Z_l »Z H00 Z- 3U U
CO o>0 Oo o*4 •*
zMl
u
•
*•4M«
u-J~a~UJt-z•"
(M•M
o•4
v«
o•
(VJ
o•* •
_ **- V«
^ II
z z«« — 1IL *"— (J
(VJ^0
in•* mO • UJ•* ^4 3
II "Zo ^ «*• Z H-
-• Zo ** co o u
* m•4 •»
0 0•4 <->
<c•4omt
»
oo•«o
<oo•M (
te ••J II1 Jz zu, **M U
>D,«
0
- mo •*4 «4
II
0 JK Z
*4
O M
O U
(0•4
o•4
UJ3zHzo<">0>,«oV4 •
z
u
zM
J~aoUJh-zM
(VI O(VI (VI0 0•« vrt
« 00(VJ W0 0
(VI KQ
(vi m (vi o>O (VJ O (VJ« • O • UJ — • O • U
--•» O -— _O D--« O-— O 3* n u z j M nz1 * O * « 1 J O -1 -Z Z H S K Z Z ( - Z K** *o ^ z ^* *o ^ozu . * - o « o u . - c « o« O O U O " - O O < J O
N ^ in *o oo o^(VJ (VJ M (VI (VI (VIo o o o o o
zinu
zinuJa0UJ
z*••
u u
211
* -JZ 2
^ ^••* M
u oII II* _)z zin intart tort
U U
J
u
M
u
J4tgj'J01
Z
^ — 1Z 2.O O» •*O UII IIzz1
<s ^•H M
u u
Jo
u*
sroMu_J
eoUJt-jr
*-
Z ZCO CCM M
v yu u* _iz z0 0•M •"•
•1 M
u u
ro
u
znM
U
Ja0ut_z«-
^ Jz z** *rtIM "•
u uII II* Jz z1") f*lIM M
u u
<tu
z
M
oJ«f
a0LU
Z
Z
0
z^ j nZ Z «i00 GC U*x >«lU O -1II II <* J ftZ Z 13<t <t UJ•* •* ^*M - zu u «
z ^•rt M
V* l-l(J uII IIz zco ro-• t-t\j U
34
MK
.CI3
4N
L
>_i0
_l
aoUJ
z
z z<f <»1-1 l-lU 0It IIX Jz z* <tfO ^01-1 krt
u o
nu
zP)
••H
u-J<(XoOfh-z«
z•
u1)zro**4
(J
U O U u o u u u o u u u u u
212
J
tart
O-II —J(•)*)tart
U
-1zNntart
(J
•
Z
f)tart
^
-1
aout_z
ztart
UII-¥zf^n*•*
U
jz -tart
U-II —JzNntart
U
Jz<0f)tart
U
•
z<om * jtart Z Z
u •* *tart tart
J (J U<- II -II-
a * jo z zUJ *0 ^0^ fO r^>Z ••« •-** O O
jzmmiu•
zinintart
U
Ja13Ult-z
^£zCOtart
u— II
i£zinintart
U
J4.COtart
u-II— -Jzmintart
U
-Jzin•n•<u>
zinntart
U
_J< -a13UJt-ztart
J£
Xtarttart
U— II-
zinntart
u
1*C
I8M
K*C
I1N
L+
2.*
AI 1
6*C
I 6
MK
*C 1
6N
I_*(
A/3
)
tart
tart
<
*.»
<
XCO**«*4-
-J II.s —tart (X
•"• 3u ->II -.Z 3m ->n ->tart *,
U (/)
*»_J
ZCOtart
U
*yfz•rtj
tart
U
•o>0tart
<
*
BV<%^
4--1
ntari
U#
*Zo
o»>o•4
tart
<
*' <
CDw+-1•*u«
zintart
U
*eg•rt
tart
<.»,
+
II
a-« >+ Ta •> tart
1 3
II I
> «^
-> *n
*C
I4M
K*C
I5N
L )
OOtart
<+
JZo•rt
tart
U«(Jzn — i>-> 4U-tt
* *<O ">(M IIta. a< 9» ~>
•OII
aB -•^ 4-•-a•- X3 •»•> li-> a» XW) ->
1 *
CI4
4M
K*C
I31
NL
*B
I16
*C
I34
MK
*C
I33
NL
48
I 16
66
*C
I31
MK
*C
I44
NL
>
M ••tart CDCO *
* -*" B< XX <CO ~^^ 4**• -J4 ZII <t
— f,a —X (J~> *--• .^_*•• f.3 f^i n~) tart
•" UV) »
MK
*C
I36
NL
*(B
/A)*B
I16
*C
I55
MK
*C
I35
NL
*(
A/B
Ntntart
UftCMtart_
3«*4II•»ax >
4 ")CC --^> *<™> I>II ">a ->x ««i <n
6*C
I36
MK
*C
I37
NL
)«tart2)4-_JZinmtart
Uft
zmn ~tart 4
^-tart
ft 3\o ^CM IItart tart
03 3ft ->
CI8
MK
*C
I 1
NL
*-2
.*A
R1
6*C
I6M
K*C
I6N
L*(
A/B
)
«tart
•rt
a<*-•<XD»••<
II•«tart
3"1
--•Ltart
D1->•(ft
u o o o u u u u u o u
213
NL
-W2
*A
*B
*P
O*C
I 1
MK
*C I IN
L
00»<U
*z_
tj
•M-•H
tart
u#SO
oc
*
CO
*zm
#CVJ•*or«t
J^tart
— >
tart *-> 3II -»ta* — )
•> v>
ON
L+
AR
66
*CI4
MK
*C I5N
L
••«tart
U
*
Zn —u •-•« »£
*
(M II
< *» ->•*)
•0IItartX **"> +tart V^^ ^
3 ~»~) II
— Xw •>
A )
*B
R 1
1 *
C I
44
MK
*C I 3
1 N
L+
BR I
6*C
I 3
4M
K*C
I 3
3N
L
VCO•II
X
»
5-)^I/)
34N
L +
( A
/B)
*B
R6
6*C
I3lM
K*C
I44
NL
-W2
*A
*B
*P
l*C
I31
Ml
ta«
O4tj£Znnu _j» y
4L.
-< na .*^CC U4- *— eg
2*C
I37
MK
*C
I36
NL
*<
B/A
)*B
R1
6*C
I55
MK
*C
I35
NL
*{
A/8
vrt
orCOu
•• >+ Tta« .
-J 3II ~>
X —T (/)
55
NL
*B
R6
6*C
I3
6M
K*C
I37
NL
M
U•»XzinN-t
U
<0(M
!j>
•<
tart
X
. «
*
or
x z"- Xor «t- >< •z orx >D -(/) >
iu cri- >
J **..
^D •«j aI -<
W — /rf »•*
u >
zz»
CM »»* II
•z.* 0
II —tatf *^
-> o-» o
—
a•z.+-u^
zz«4
II<M-1
O
2•*oo
<\JDaz+CM
IIJ
(VI
*• #Zz
o —II II3 >•> ->
C\i (M
* *» «•Z Zz z» MwCM !•)II II» Xn ->
#
zz
II
T
'
z z z z z >Z Z Z Z 7 -)
lO O N« 00 IIII II II II II -D > * X V TT "J T "S T "^
ZzM
V*
1
0o**Q
Q
*rt
Daz7
2
ZZ
««
CMZ
oo
~Q
Q
<MZ5 *^a +z or•f ">CM nZ fy
\I.
II Oz ->
ooo
214
J
u
*to*
U
Jor—oLUhtoZto*
CM0
O
CMOto*to*>*
~s£1z*»u.to*
ino
• •*o —II* cz t-M O
u o(M
•O~ir¥z•M
U
-0Oto*
<C0
«*
oto*-
u -•^ to*Z~J- 1t- Zz ~C ILo «-•
to*
0II_)zto*
(Joto*
oto* •— o~ irO -J1- Z
^a *-o u
CO
^"Z~to*t»zcu
zmu
zin
_jo;o•u^vz•"
z<»to*
uIIyzinto*
U
J
(JIIJz:nto*
u
z
u
zmto*
O
-1«£
~or~"0uz"*
(M
(M
to*
*1
Z**u.••*
tf)• to*
to* to*II^ oZ t-"0to* ou oeg
-
in
—-O-II Z
Z H^0 *?
». ou u•* in»* «*
o«*
CO
to^J1z*>^
IL
•.*)IIJroto*<->
•0
•
O" in>* •••-to*.
nO -J1- Z
1*)o •-0 U
CO
**
UJ
~z~
^-z0ua
^
zo
u
zo
o_/
"" aoUJ
z
CMCM
CMCM
-* o. -»-||
| ZZ 0
IL "-1to* u
CMCM
**O O <J o u u o u o u o
215
<\J
* — *# • *
CL N a* -. ** - _i» • *z a z
tn * rw o «CM • -< • CM •• « C M U j " - " O » - C \ l U J- M 3 - M - II 3
* Z _l J J Z0 Z - I Z C Z ~H O ^ Z O K O H.« z «. - -. zO ' - C U - ' - ' O ' - Oe > o ( j * - L > o u ( j
^ in o o cj*CM CM {\j c\j CM
zCM
u
zCM•M
u
J4a
UJ
z•-1
* _Jz zn n>-« ••u uII IIz zCM (VJ•* »H
u u
J
u
zoM
u
-1<or0Uj
z"•
z z0 0•« — ••— wU 0II IIz z0* 0*ta* M
y u
zN
U
zN•M
U
J<aoUJ.z"-1
* Jz zV <tM M
0 UIf II* -Jz zN NM M
u u
39
MK
. C
I39
NL
M!
U
J
oroUJ
z
* J<t <f>-> l-<(J yII M* -1Z Z
n *)1-1 M
U U
40
MK
, C
I40
NL
M
U
_J<a•oUJ.z
z ^•* •*\j U
• II II
x zo oIX M
u o
_/•0inMM
U
•
*Z>0inU
j<aoUJH-z
u u o (J U U u o u U O (J U O
216
* JZ 20 0•rt _4
tort tort
0 UM ilIt
z z<O ,0m in
400to•rt
U•
•£•x.00ntort
(J
J
^auu
j^xf>to*
UIIII
*zCOn
J2ntort
UII '
zCOn
_jz•rt
tort
U
•
^£z•rt
•rt
U
-»oroUJv-
j£zntort
U
*z•4
^
_l2COtort
U
Jztort
^
J
Z
intort
U
•J£
ZNintort
U
rffL —
or0UJt»
zo«rt
tort
UIIH-
zNm
_izo•rt
tort
UII1zsin
jz(M
tort
.U
•¥zM
tort
o
^XoUJK
y -1z z<t <ttort tort
U 0H II— II
* Jf. Z<\J <M<» <t
JZntort
u
•
*zmtort
U
—
a0tith-
*C
I4N
L+
<B
/A)*A
I16
*C
I10
MK
*C
I3N
L+
(A
/B)
CI4
MK
*C
I5N
L )
^ *Z 0in otort tort
U .<* +<M -J- Z— o< -fen* tort
+ U* _» II »<t o- a ztort tort PO
M il & t 1— II »-W
Z Z > vOf) ro ~j f\i^ •* ~> *—
*C
I2M
K*C
I9N
L+
2.*
AI2
6*C
I7M
K*C
I7N
L. +
(B
/A)
<MNtort
<
***XX<**+*
*II—»a— >
a —- --*.
•^ >It ~>
ff ">
^*_iz<vjtort
U
*j£.Zo-
-
o\Qtort
•oM
a— *fV A(X — •-
~) >II -»OC ~>
K*C
I40
NL
+(B
/A|*
BI1
6*C
I56
MK
*C
I38
NL
*(
A/B
Z0>ntort
U
*C\Jvrt
tort
33w
II«>a
-rt X
*Y A-iX — •
^ >II ->
or 1tort tort zO U «
tort tort 2 tort tort z ». to*•. U U ~> u u -
Z to. tort Z - to-
U U (J (J U O u o u o o
217
66
*C
14
0M
K*C
I39
NL
)
tart
03•f_jZOin•Ml
u*zCOf) •*
u a•O 1CM M
CO >•
22
*C
14
1M
K*C
I57
NL
+B
I26
*C
I42
MK
*C
I43
NL
+B
I26
I66
*C
I57
MK
*C
I41
NL
)
tart 0303 *
* -»•» 4CO XX CD
«•» +""* Jrt> Zl| CM
ct •-^* ^•> *M X
> n-> •*
— u(/> *
*C
I4N
L+
<B
/A)*
AR
16
*C
I 10M
K*C
I3N
L +
1 A
/B)
XZintart
U»CM•4
CC<IIM
+ Ttart •D tart
1 >
II ~»
D «--» </>
6*C
I4M
K*C
15
NL
<0a<rt>J
Zo»rt
tart
U»J£zPO
tj
*vOCMCC
*
*C
I2M
K*C I
9N
L+
2 •
*A
R2
6*C I
7M
K*C
I 7
NI_
+ (
B/A
)
CMCMCC<
*e+
00X<•II«
* ntart •> **
"^ >II ">M ««
7
n io
CM
U
ZCM
U
0a*03
*<
*CMB1-1ZCMM •
U 0» IIZ tart
tart + *>(J tart .
* » «*0 *") ^O II ->CX M "*
» n w
K*C
I40
NL
*( 8/A
> *
BR
1 6
*C
I 5
6M
K*C
I 3
8N
L *
( A
/B
)
Z01")tart
(J
*CMwrt
or03II*+
*+
** ?C•f •»l-rt •
X tart-> >
II ">
X ~"> w
66
*C
I40
MK
*C
I39
NL
a.ca4>
J
*£mtart
y
*j^ZCO
tart
(J
**0CM
CQ
*
*C
I41
MK
*C
I5
7N
L*B
R2
6*C
I42
MK
*C
I 4
3N
L*B
R2
6
CMCMaCO
*COX<«vII*%tart
4- ->tart •X tart
-> >
tal
> ^1 trt
Oo
R6
6*C
I57
MK
*C
I41
NL
-W2 *
A*B
*P
1 *
C 1
4 IM
K*C
I 4
IN
I
CO
*A<XCOt.
rt>1
zCM4tart
*ZPO
*(J*
B
tart
X
tart
D
X
tart
B•
X CCtart X
Ct «f- B< "Z Ct03 B3 •*(0 B
•
t- >4 ««J »"N «
U CCJ 3
U B
CM
*
Z
*NII
~>
Zz•«rtII•"^ooCM
—ao
• zz«rt
II" CMD j
J
aZ 0tart r>4 CV*^ *^
II Ox a
CM3aztartrt> OCM IIJ *yI
J T
CM
*ZZ
*wrt
II
->
CM#
ZZ
*C\JI)
-)
c\i CM
* *z zz z* *K) <fII IIa *vu.
-) ->
CM CM CM CM CM
Z Z 2. Z Z7 Z Z Z Z
* * * * *iO *C ^ CC C^It M II II M
D > * x >- > - ) - ) - > 1
—i•*•
B->1IIM
-^Jfc
"»
<J U
218
zz
IIXI IX
s oa
o zo —
zO IIO X
zz
IICM CMZ D —
a *o z a0 - 3cvi + ->« CM ||
z aO II 3O Z "»
Z0(VIXI
u»*XoCMxiU
J<ac13UJKZXI
CMO(VIXI
•<*o(VIXI
•CMO(MXI
«**1Z**U.IX
•oII*T0CMM
U
CMO(VI
inoCMXI
oK
oo
0*M
*K
*P
I**2
•CMIf
*ZO(VI»4
o•*o(M
UJ3Z»•*
V-ZCuinoCM
«0CM
•coo(VIXI
»
oo(VIXI
AJ1zwa.
•oMJZO(V)M
0
•0oCM
o>o(MXI
OV-
oo
0*N
*L
*P
I**2
•CMII-1ZoCMIX
u(CoCM
Hi3ZIX
V-ZOU
0>o(M
XX
u
CMXI
(VIXI
«>•*XI
CVI
— in inXI (VI XI
u -i u
z*••u.
z o zN H NXI XI
IX C -
U O U
Jz
•O vO-• fON wXI (J
»CO •-1 ^CM X~4 vO• tn
>0 N-
- uCM
111 — _J3 - <z _j cr•x I Ot- z iuz ^ i-O U. Z(J -I «
-z z4t <tIX !-•
U UII II* _JX Z
Zininu
zininuj<a.oUJ
z z» COtort »••«
U UII II^ Jz zin min m
CM^^CM
<*XI
(VJ
u u u L> U u u
219
J
zinnMl
u•
xmnMi
U
_J^ .
CC0LU
ZMl
*X.4
Ml
UII¥5mnMl
U
(8
/V)4
TN
9I3
*X
H9
I3*9
l«V
*^+
nN
I 13*
¥XCOMl
u4f•M
M
X<*•»<XCO*^
-J ^»« XMl 3u ~>M •-J ccZ 3in ->n "»Ml <*t
u to
_jz
u**
u*o0.
*CO
*«t
*CM91JZCOMl
U
*•)£.
XV* »4
Ml 4
U X* >\Q ">«O IIx a< >* n
4(B
/A
)*A
R1
6*C
I 1
0M
K*C
I3N
L*(A
/B)
K*C
I5N
L
J XZ 4<f Ml
M. U
U *» <oX <0X Xin <u j* zCM 0•4 *4
X -< 0II *•• ^X X> 1") «"•"^ ••• 4• U Xa » sO *0 ^~> CM II-> x x•^ < *CO * ->
K*C
I31
NL
4B
R1
6*C
I34
MK
*C
I33
NL
X44MIU»•4«4XCO
*f*<X
• rno «"II H•* ~>X X
* — X~> 4 "">» X •a x a3 ^ D~* II ""> X "»M> X V
CO "> CO
66
*C
I31
MK
*C
I44
NL
->T
2*A
*B
*P
1*C
I31
MK
XCO
•CDX<•-.4
irj>-iU
*XronMl
u«*0_4
XCC4
NL
4(B
/A)*B
R1
6*C
I55
MK
*C
13
5N
_4
(A
/B)
«n
O
*XNro
~
CM•«
OIIAX
•" >4 *1
j a •z >• or-« -» Dro l| •)M. x -»U >• **# ~) CO
zN
ro»*(J
*•O<oXCO4
ininMl
*
XinroMl
O»0CVIXCC
*
MK
*C
I1N
L4
2.*
AI
16
*C
I6M
K*C
I6N
L4
( A
/B
)
COMl
u4tV*
*4Ml
<
*
< ~^ _l
CO Z~ 00
T uII *** ^Ml X
•» o •*4 "> -Ml • (3 a #-> D vOII "> «0Ml "> Ml
D - <-> co #
«^COX<»H4
mIM
U
*XO•4
M«
U»0
< JX Zco in** Ml
4 U
4 XMl ^
U M.
* UX «X ^0in oMJ Ml
O <
* 4CM u-< zMl O
< ••'W Ml
1 UII *
<•» ^M> X
- > m4 -) MIMl «, (J
> X *-) 3 >On n CMMl -) M
> V, <
n CO *
4M
K *
C I 3
1 N
L 4
B 1
1 6
*C
I 3
4M
K *C
I 3
3N
L4 B
I 1
6
31
MK
*C
I44
NL
)4 Ml
M, O
u *
•4 ^^•4 Ml
Ml CO
co »— 15< XX <CD ~•"• 4
o T^n n «— — roMl Ml Ml
— « — X U4 1 4 -> *
*•* * ta4 * ^* x x or 5-> D n r> nII 1 II n roMl 1 Ml - M
» W X — U
"» co -> to *
36
NL
4<
B/A
)*B
I16
*C
I55
MK
*C
I35
NL
4(
A/B
Ml
U»
XNroM4
uCM•4
M
CD«•«
1II
M•• >•+ 1Ml •
> X
II •>X «--» co
6M
K*C
I37
NL
)
roM
U»vOvQ_
o-I Xz -in xm t-u x* CD^ DX COtnro LU«- r-U <* -J•0 3CM UMl J
CO <* u
Ml
X
Ml
XX
Ml
X
Ml
X
3X
»
ctX
»XXX
»X
*X CM
> *» *X Z> zX »> —• IIX X
x ->> ->
ooin
u u
220
J
« CVi<J o
vOo
zin
zz•
II •«_- -5••* ^
* ao —0 +«o -i0 ||0 *
zz*
II CVJM "}v^l ^X_j a
zo —o +<C CM
0 IIO «J
CM
*zz*0 -
II II3 >
Cvj cvjft «IN
N*C
=«kN
N*£
= 2
-L U.
* X
ftzzftII
>
CM
ZZ
*inn
3
CVJft
ZzftII
>
cvjft
ZzftII»
N (VIft «z zz zft ft<C <3>II II
X >•
• zz•
+ IIa _-
^
> X
-> oII 0a. <o-> a-> a
z•
-4 IID / V i
*S*a zzi- O•f O- <oy
II 0X O
a +z a- 3+ TCVJ IIZ ffu.II OZ 1
X
•*u
auH-z
O<o•NovO •~> O^ II
00o
X X I-
inO • UJvQ O 3
"I Zo ^ <-•
u. *-» uCvjO<0
Z0 « OO U U
<» ino ovO '-0
O ON>0 • O— O «0_l II..' -J a
— •*u. « o« o o
• UjO 3II 7-I -Z t-<* z- o
O
_J<y.oUJi-z
CO 0>o o
o u o o u o
221
Z Z
M CM
n
o uII IIX Jz zin mMM Z
u u «
a:oUJ
oo•
CO
<O
CM
«0«^ V*
* III *z zu. —M U
CM
m in•^ • LJ<O<O — D« —
II Z _) IIC * « - I J» - Z K Z Z
*o z — (*so - a i L -o o u — u
o in« • LU
~ z
ro Z
O U U
CQ ^
-Io
zo
u-Iatou
<MCM•o
(M•0
CMCM ••0 O— M
**2
CM
CM
**
in
a.***z*•
COCM
CM
Z O H
U. «« U
MCM•-0
a.*
*z*• (^ •
o CM <M u;II 3 T* II >0 l| DV Z _l _l _l Zz - i z a z -O H Z O H O »-~ Z ~ i - Z
o - o u . » - o « cO ( J U * - U O U U
CM CM IU<0
-ICVJ*+
u
ZCMu z z
m m
< u un M* J
LU Z Z>- CM CMT ^^ *•«
o
j
2O>
U
aLU
Z
•* mCVI CMvO O
Mon a*o ^o
U (J u u u U (J
u —
u u u
222
* -1z z0 0
o oII II* _»z zO g>IX fr4
0 U
z
o
z
o
4y.oUJt_zfa*
* Jz z* •*fa* Ml
o oII II* -Jz zN r-•* IX
0 0
-1z0>nu
*
z0>nuJa15UJ.
Zfa*
* _lz zfa* fa*
u uII IIX Jz z^ ^n nIX M*
0 O
Jo•*o
o
oJa0UJt»z
z z
0 0II II* Jz z0 0* •*M IX
0 0
L
CI5
6M
K,
C1
56
NL
<aOlit.
Z«•
Z Z0 0
0 0II IIX Jz zO iOm inHI IX
0 0
L
CI3
8M
K.C
I38
NL
<a0u.z•»
z zn f>o on n* -iz z00 COco roM IX
0 0
J
u
z
oJ<aouf-ztart
* -JZ Z
fa* fa*
0 OI) IIz zM <X
<f ^IX IX
o u
L
CI5
7M
K.
CI5
7N
L
<aoUlH-ztart
O
tart
UII
ZNinIX
<J
u u u u u u 0 0 0 O O O O O O O O O O O
223
J 1z zCM ro<t *M tart
u o» .¥ ^z z
-i CM roZ * * J «o *- z *- «•. U <f Utart tart tart
U J <J U JII < II II <j a * j az o z z oN LU CM CM OJm K •* < »-
z « « z,j .- u U »-
«%.COX<«^+Jzrotart
u**zo•M)
*4u'•*
>0tart
a.<* _i-> z< mx «CD U~ #+ X
zl* .4ta- uu «4t ^
V >0z am <»"* +U J* zCM O** **Q£ ^-4
< U* _l II #Z Z ~ *•* <t a zta. ** o roU U 1 "-II II • U* j or *z z > ^ro ro -» CM•*•*•> atart tart »»<
(J <w> l/> #
<\
CO«^4.^J2Ntart
U
**zNtart
U
*oCMa< -i» z• CM
CM ~* UJ »
Z *o zt-i CMo —* u* *Z 0CM a« #u co* *CM <CM *a CM< »* 1
£2!X CM< tartw UII *or z
•• > O1 «•f -> — 4or • u a> (V # »
n > >o ->n -> o uor -> or or> w < %
-> in * -»
COX<M+_jz00rotart
U
**z<0mu*<o«rt
aCD J* Z^ ^< fO
CO U«- *•f ^zl0 <t•* «tart (Ju ** vO
^ <0Z X^ CDro +tart _J
u z# «cCM in«rt ta4
• or uO CO #M II *~ - za cc. t>x -• x n"> + ~> w• a • <J
a x ct #> •* > >o-J II -> CM"> or "> orw x *. m« / ) " > « / > »
_iz«4
>o *CM -« U2) *+ X_J Zz -ro ** «M U
U *» -«x az *CM CD<t *« <O ** CM<o »CM 1a jCO Z4- _•-I 4Z ~N Uin «.« ^u z* Nid inz ~- 0<t *tart ,0o ^* orCM CO<\j *a -»CD <» X_ COCO ~X +^ I•* zI) CM*•» ^or «
- >• o•f ") #a • *>• or z-» > roII -> *rr -> -> ~ ui »n *
^%COX<«**4>-1ZrotanU
*XZo*rt
ta4
O
*<094
tart
<
**% «^
< -1
X Zca in*^ tart
+ UJ *z *<t ztart *U -i* uX »Z ^5in <oM M
O <* +CM _l
- Ztart o< «*^^ tart
1 UII *
i-rt 2•" 3 f) •*+ T *- 4.*- • (j «.D O1 * >^ > i£ -jII ~> CM IItart T at tart
D "^ < >- > ( / ) # T
<XCOSrt>
4_l
?
Ntart
u**zNta«
U
*vOCMta4<
*•CM4JZotart
o*t!CMM
U
*CMCM
^
**^CD «-X J< Z— (M*•» tart
1 UII *M Z
T tart +
• u «-"a » *> >o ->"> o n• tart ta"
*. < *U) # ->
enX<•
+_lzCOrotart
U
**zvOmtart
U
*«••4
tart
CO* -.-» J< zX 0>CQ ro
+ UJ *Z *0 Z
* 0•- «•o —* u* «Z vC0* Oro tarttart ac
* _iCVi Z
n mCD ta.
• •*» u0 1 *n n x
tart ta. CO* - X ro -
• ». . y ».a x or # >> -» > « i1 II 1 CM II
** X N. CD >10 "1 </) * T
U u o u
224
Jzm<tort
u**CM
*tart
u*<0CMtart
00 ~
WP
YW
RX
}*z -N <tin «ta4 (J
u ** ** zZ N- in
tart
9a*•tort)
>
KB•
tart
* «
-( <
A/B
)*B
I2
2*C
I
NL
+(B
/A)*B
I66
*C
M CM— <frtart »rt
> Un #• *
a y«r
> !*>"> «"^ MI ^^
•~ (Jl/> *
BM
AT
RIX
WR
.W
RX
R .
WR
YR
, WR
3 ttifl *
»ui af- >< or
1 %^ v3 •«-> a_j — t^ -rt'
< aU 2
\
zz
CM •
* -« II'£. —Z X
*ryj oII Oa Nf-> o-> a
zz•
»rt
— II3 CMa _izNrt O
+ 0- Nx'II O* O
CM3az+ oCM IIJ 0»II 3_l -»
CM CM
* «Z Zz z- CMII IIa *ua.> »-> •>
CM CM
* *Z Zz zn *n na * *
\LX >•-> n
CM CM
« *Z Zz zin on nD >-» -)
CM CM
» »Z Zz zS 00II II3. Xn ->
CM -
* aZ 9z ->0> IIn or> ->n ->
zz»
vrt
II -- Dz a
zO ^^*"0 •«•N -•j
O IIO i
zz»
n* CMCM 3 -z a +
z orO te •••.*^ Jo * ->S <NJ ||
Z iYiiC II 30 Z ~>
zoCM•- CMu o
zoCM
OUJ
oN»
CMOh.
VI
CM
**to*
a*
ooN•
00oN.
• ino oII N
OO
« ou oCMos
z
*o•
(M UlII D* Zar >-o i-CM Z« OO O
<t mo oN S
• O>^ O OJ II NI _lZ Z O>* O K
U. «« uco
u u o
225
iCM 111U 3J ZZ «O K*M 7CM ^«- cu u00 0*o oN N
Z
•4
U
*N
••*U
_J
aUJh-Z~
p-
f-s*.Xi2
U.
•**II
ZN_
U
(NJ•4
N
in.MN
O
*-OO
in-. UJII D5^ ZZ -N H
- OU U
<t in•^ ^4
N N
N
N.
N**.J1Z
u.M
t-i MII N
Z 0N t-
*• OU O
•o•N
inM
II
ZN
M
U
CO«4
N
UJ3ZM
Ooa«4
N
JZCO••4
u
z00
u_J<aoUJ
z•"
0 0n nz z00 00
M —u u
Jzn
U
uJaIX.'
— z
o oM M^ _l
n n
u u
jz
- y. zM N N
U -• -
atou
«4 « 2 « —
jm
in
uJ
II IIX -J az z o- - liJ
« u (J ~
o o o u o o u o u o o u u u
* -Jz zco n
u on nx _jz zm in
u u
u
226
z(VI
u
z(VI
u-1crouKZ«•*
X
^krt
u
zCJ»4
*4
U
•J 0Z II
— a«- 3II A
iaz *(VJ -»»4 "}
« *^
U (/)
*4
*
"1
II
a
">
•ona> «•A fy* l£a BB ~)• II•» a«-• *<n ->
/A
)*K
1 1
*A
R4
4*C
I20
MK
*C
I17
NL
+2
.*K
12
*A
R4
5*C
1 18M
K
K2
2*A
R5
5*C
I 1
7M
K*C
I 2
0N
L-
W2
*A
*B
*P
O*C
I 1
7M
K*C
I 17N
L
33 *
II CC
a <* —-> ** 1
a z1
* 00-> ^-> -i^* ^J(/) *
Kl
1*A
R4
4*C
I 1
3M
K*C
I11
NL
*A
*K
12
*A
R4
5*C
I1 IM
K*C
I13
NL
*XIIex
M X* na _•x a•> »n ">a -»X Mi tfl
Ki
2*A
R4
5*C 1
15
MK
*C I 1
2N
L +
A*K
22
*A
R5
5 *
C I 1
2M
K*C
I 1
5N
L
*COIIa
"H >
a &
*> a•» an ~>a "»y —
• •o oII U
M M
•* O •• >
+ •) 4- 1
3 a > a-> B -> *II ~> II ")•4 "1 *4 T
3 -* > --> <n -> tn
(B/A
) *K
1 1
*A
I44
*C
I20
HK
*C
I17
NL
4-2
.*K
12
*A
I45
*C
I18
MK
«»1II_
•• jt+ 1
» a"> BM ">•4 T
B N^
-> in
K2
2*A
IS5
*C
I17
MK
*C
I20
NL
)
O*K
1 1
*A
I44
*C
I 1
3M
K*C
I 1 i
NL
+ A
*K
1 2
* A
I 4
5*C
I 1
1M
K*C
I13
IM
B*K
12
*A
I45
*C
I 1
5M
K*C
I12
NL
*A
*K
22
*A
I55
*C
I 1
2M
K*C
I15
NA
TR
IX
. X
RX
R.X
RV
R.X
RU
I, X
RV
I .
XR
WI
,XR
XI,
XR Y
I
* «- — z a z~ 1 1 CO B ZCD II M 3 CT (VJ •X ^* ** I/) X # *^< « « • * II -— - « x . 4 > t i j a : z — 3* - f - » + - > H > z ^ az x a v a j x n o —C O T « - > B 3 » I I O 4 >— H T i i T u a a c o - i*•* ** ^J ••* ^J ^J ^J X JL
U X > x y — < a •» O M* " ) ( / ) ~ ) ( / > U X - ) Q ^
OON
zz
II (VJ(VJ 3_j ao —O 4-D <VJ
_jO IIO -1
(\J
**z
*o •*II Ita a3 >
(vj (vi
* ** *Z ZZ z* *(vj nM na aB X
u u u u
227
CM CM
* ** «Z Zz z# »•* mu ua «->- o-> ->
CM
**Zz*oII>
">
CM CM
* ** *Z Zz z* #N COII II«•« Ma X-> ->
CM
**zz*oIIto*
>.
~>
+a.XT•>ua.X~>~>
zz
« Dz az
O «~t0 +CO —
z0 II0 £
z
•4
IICMzooCO
oa
CMO *4
a +z a- "24. TW l|Z XII 3Z T
C1
44
MK
* C
14
4N
L
J
a(yUJ
Z"
CMO00
000
<\JoCO>•»y1z^>ItM
• (00 0II CO
*S 0
•« oU 0
CMoCO
*M
*K
*P
I**i!
*CM UII 3* ZZ I-*•& ^*<t z•- o(J (J
•& in0 O00 CO
vO0CO•
COoCO«oo •co o— II_J _l1 Zz •*«- <»u. •-— u
vOo00
*N
*L
*P
I**2
a •O CM3) M
Jo z
4o —o u
COo03
ItlzM
t_z0u9>o00
Jz«*
z
uJa(y(U
ztart
CM«4
CO 00
00
CO
CM
CO<-»
1ZMu.•-
m• m •
•« «H «-•
II » ||
X 0 X«•* - «-i
*0 ro« o —u o u(M •*
00 OD
Uj3Zi-»^»Z0umoo
co
00«**
jizs^
tt
^IIJz••4
n*wu>0
00
_lcc
o.
c15
u u U <J O
228
in•*« (xJH Oj 2Z *•"•"• H»"> Z- oo u00 O•4 •*30 00
33
MK
. C
I33
NL
!_|
U
J4XoLU
z
CM <OCM CM9 00
<fr COCM CM00 SO» •
CM OOg « If) • ( M * O *C O O C M O U J C O O C M O O J•» II CO II D -» M <C II D* * * Z _J _J _IZI Z O T - I Z O Z -
*^(O r o Z ^ ^ P * ^ O Zl i . f » O ' " « O l L ' " ' O > " 4 C- O O U U i - O O U O
(M •* 10 *0 00 O1
CM CM CM CM CM CM00 OC 00 30 GO 00
34
MK
, C
I34
NL
<_iU
-1aoUJt-z
s.nfON4
UIIznu
z(0n*^uujznMu
39
MK
, C
I39
NL
i-iU
j<a0Ujh-z
ii -1z zro nn mM M*
U UII IIX _)z zc^ ^n roM M
u u
z0
u
zoM
U
-JaouH-z"•
* Jy. 2n ror^ f^)••< IM
y (ju n¥ _jz z0 0
* *M M
0 O
56
MK
, C
I56
NL
M
U
-J<KOUJKZ!•*
Z Z^ •*•* •*** ^4
U 0II IIX Jz z*o *c>n inM •—
U 0
u o o u u O <J O o u u
229
JzCOnu
•>
*zCOroM
<J
J
aoIDtviz
^ «Jz z•4 »4
n n
u uu ux ^z zCO (DW) 1*)
u u
-1Z**)-•
U
Xz•uM
u.JajjKZ
0 OII IIX _lz zro ro«M »*
M 1-4
U U
Jz•*
—5*
z*rtM
kH
U
J4fJ
a15UJ
^-z•
* Jz z« «4
n no uu itx JX Z
•4 V4
•4 1-1
u u
JzCO<\J
u
JzccM
uJa15UJt-z**
x Jz z<t «•- *o uII IIX Jy z00 03CM <\J
H ""U U
_Jz-4CM
U
J
Z
CMM
U
JoroUJt-z
X -Jz z•* •*f) (*)
u uII IIX Jz z-4 «4
CM CM1-4 1-4
O U
J
Z4<M
U
•XZO<MM
«->
-J
aoUJ
z
^ Jz zn rof*> O
u uu nx jz zVfl !0
CM CM•^ ^4
U (J
Jztrt<M
^*ylACM»••U
j4X
aoUJt-z•*
X «Jz z!*) (*)
2 M
*J OII IIz zID IDCM (Mk4 M
U U
JzCMNH
U
JZ
(MM
O
_J
a15UJ^*z«->
u u u u u u u u U O U U O O U U (J U O
230
X _Jz zn inro *oM Ml
U UII IIX Jz z•* <*!M (VIMl Ml
U U
-1 -1Z ZO rom cviM Ml
U U
• •x xz zo x j nro z z (vjMl * <J Ml
U * * <JMl Ml
-1 U U -1< II II <a x j a0 Z Z OUJ o O UJh- ro n HZ — Ml Z
MI u y M.
-Jz
<0 roMl Ml
ac oa) *4- X
z'Sro ron MIMl U
u *» —x az *4* COro #i- <u ** (VIvO »Ml |
a _iCO Z+ *j *Z Ml
Ml U
ro *Ml *u z» Ml
X roZ M.<t 0<f »Ml VC
U O« KMl C
Ml *a ~ro 00* X-. <
< —X 4-0 J
X _l — Zr z ii <tMI MI «• roro ro ct «Ml Ml 3 O
U U T *M II • Xx -J a zZ Z X "0ro m -> ro(V) (VI 1 —Ml Ml *- U
u u in *Ml
6M
K*C
I38
NL
+(A
/B)
(nu»<oMl
aGO J« Z*•* o^< rnX «-"CO UV *4> XJ ZZ 00 <t* <-Ml U
o »* oX >0z or0> COro +u z« «o(vj mMl Ml
<r oa *II *-« zX CO- > n
+ -> —a • o> a *n x ,0II *•> (VIa -> a> — cc•>( / )#
•4
JZmMl
Ml
U
*Ml
Ml
U»in*a<*(VIMl
X
*<+Jz*•«*4
M
U
*XzroMl
Ml
(J
*«
<t
a.<*Ml
Ml.
X
*CDII
*•%
2— * Ml4- ") 4-a • a» a x-> x nII -) IIa -> D:* — x-> tn ->
CI2
6M
K*C
I26
NL
4-(
A/B
L-W
2*A
*B
*P
2*C
I21
MK
* Z•0 -Ml (VI
a MI0 U
* *• X(VI Z+ Ml
_l (VIZ M.
Ml U
(VI *
— *U <t* orx <z «CO Ml
(V -«"• ^u ** coMl *Ml <
a 4>a -i* z^ CO< (VIX *•ro u~ *II X^ zor MIX CVJ
-> —» O -Ja # zx «o ->-> o w-» a: MIv O U</) * »
Ml (VJ
toX4
4._J
in(VJMl
U
*XzoroMl
U»<o•4
ao***<xCOta*
4>_l
(VI
o*xzin(VI
u*(VI«4
ceoitir
Ml >•
4- ->a •> a-* xn ~>a ->> w•> w
2*A
R4
5*C
I23
M<
*4
X
*CD«<+_»
in(VIt^
u*Xz«(VJMl
U
*<0>0
aQ+_)
0roMl
U
*Xzro(VJM
U _J* z<O ro(VJ (VJ
C O» *- (VI
I34
MK
*C
I33
NL
U#<OV*
Ml
COtJZ
roMl
U
*X4<tMl
U»—
Ml
CO
*««<xCO«^
YIIk-
- 34- ->Ml •
3 a-> xn ->
D ~-> (ft
A
JZ
**Ml
U
*XzMl
roMl
U»•0oMl
CO
*«%CDX<**4-
4•*mMl
U
Xzmro —- 4-u —* >o •»- n25 >+ -)•*
I56
MK
*C
I38
NL
+(A
/B)
U#«Ml
Ml
CO* *+-• J< zx o>CD roS* Ml
* UJ »Z Xo z•* o« •*O Ml
* uX *z <oo <on —— CDU 4-* J(VJ ZMl «
M. mCO Ml
— u1 »II X— zM, CO
> n•> Ml
• oa *X •£T M
, CCui *
»«4
xz•4
Ml
U
*m«•Ml
<
*(VIMl
X
*<4>J
Ml
.«
Ml
U
*XznMM
U
**<tta*
<
*Ml
X
*CO
TII**Ml
MI m* ->Ml •
* a.-> xII -i
X *,n i/)
U (J U <J u u o
231

-I>oCVJ
- n
u x* •>
u** ~Z _l>0 ZCM ">M <M
U K« U0 *"* XM Z
Q -* (M
<\J U
• *_l *Z <t
(M <"• *U —» **
* *z *CO 00OJ #M <
u +* J- z- COM (M
Q «» U~+ #< ^X *CD -i— (V
1 UII *~ o*•* <0 0*
H •* ~n o w• » —or —x to o™> X K™i 4« ^ oui * o
in•
M S— J ^Z MN ^>
— Z« o0 (J
J0)
^zCO
aoOJ
_Jz
M N
0IIZ ZCO CO
Of15OJ
O OII IIX _lz zn n
z - - z - ~»•- (j U •-
4orinz
(J U —
u uII IIX Jz z
m
zin
u_joruuz
J
v _Jz zn fo
u on nx -iin in
z(M *M Z
U
JI13HI
UII
Z<M
J O
Z ^
— a»- DO •>II *
Z(M
OII
ex
^* *^ z ^^ *^ ^^
• or*•• 3
* ->a
CO
(M
U U U O O <J O U
u — uu «- o u < n
U U U
n ~>or -»> »*•» <n ">
232
*z»p*u*in•*<*(VJ**x#•
(VI+
zN»*M
U -»* _l* zZ 0O (VJ(VJ MM U
u ** *•* z* NM «*
< <->
ft O
- *- m* in* M-» <
< ft
X (VJCO (VI"^ ¥w *+ *^II X__ ^** Xa <B ~ —T + 4• j a- Z x
B CO T-) — II-> — a~ u x< / ) » - >
*C
I1 1
MK
*C
I13
NL
in*p*<*cvt•M
*<
*-1
Zp*p*p*uft
*znp*M
U
**<tM
<
«
P*PN
*4tX
**•fII
aX•}_
B•
v
(/)
*C
I12
MK
*C
I15
NL
<ninPM<
*<VI(VJx
*<+jz(\J«4
•M4
u*Vzm-*4
*N«
U
*in•*x«<*(VI
X
*00>v•*•IIa
v4 X »*
+ 1 +
a • —V -- 3*1 B ">II 1 IIa i «V «- 3-> l/> 1
R4
5*C
I Ib
MK
17
MK
OC
I17
NL
< —» U(VI «•* 0^ a» «• CO
(VJ ft+ <J ftZ (VJN B
- 1« JU Zft O* (VJz -0 U(VJ ft
M *u zft N
* -* p-a u< »» m•* m- xX <ft ft-» (VJ< (VJX )£
• • ec ft0 O — -»l| II II CO
D — > — * ~- —"> + -> + -) + +— > « B — Z XB -» B -) B CO In n T n n p- u-5 «-> — ->— —~ > — B «- U Xin ~> v> ~> (/> » i
I 1
1
MK
*C
I13
NL
I12
MK
*C
I15
NL
U Uft ftin m* in
^5ft *(VJ (VJ— (VJ
* *ft ft< <+ +J Jz z— CVIp* PI
M M
u uft ft* *z zm mp4 P*
M ••«
0 Uft ft<t m<» *a a< <* *— (VIp* *4
^ ^ft ft3) CDII M
M M
«"" X >••f -) •>> •_, —^ B BU T T
>p< T T> ^» **^ I/) CO
k^
>»
p^
X
••*Xp^X»
p^BPM
X«
ta«
>«^
X
•M
31*X•
X>p*X•x or
p- Xa -K X< •z aCO B
tn wv/ ^
•iu ctH >
J XO •u ocj 34 •-•U X
Zz*
N —« nM# —zft ^3
00 C5II 1*)pM P-x-> o
zz
II(M (V) * ft
ft ftZ Zz z
(VIftft
zz
(VI cvi CM -> IIft ft ft + -
o M
O -II IIQf QC3 >
(vj nM na ctB X
Z Z Z Z Z Z XZ Z Z Z Z Z - > 0# » # » # » - > o^ in '0 N oo o> n mII II II II II II - -
QJ M M M M M X
> 3 > B X > " » O" > - > - > - » - > - > - > o
ooM
u
233
2.Z
II~> N (MO Z. 0 ~a a +Z o Z (t«- O •- 3
— -4 C\J II
z z orII O II 3Z 0 Z •»
44
MK
, C
I44
NL
•«U
J
aOJ
Z
(VJ0n•
0
»(VIon ••*• o— (II Xz •*••* ^u. *•~ u
ftlro
*K
*P
I**2
Xm *o •- n
^o zK ^
^O ••w u
*ro
* 1
30
8*
13
06
*L
*P
I**2
« Z0 0- »ro • o •
UJ -» O fO fvj3 - II - IIZ J J J
t" Z <fr >• <t'Z • <t <SO U, "• O *—
u — u o ulO vO 00
n ro ro
III3z•_
.2;Q
uan
J- Mro —•-I rou ~
z ro
- Mo **
roJ — 14 **a ^O 1OJ Z
Z it
in in• «4 *
-. ro ~II — II^ Vz a z••• ^ *Hro "iM a Mu o uCU <f
ro "»
<0
CO
0Mro •
ui - «3-11Z J J- 1 ZK Z —Z ^ (0O (L «U w U
«1 vO
ro w
o* <n» •ro - UJ•» H 3
J Z0 Z -K »* H
n rc - oo u O
co a(0 fO
33
MK
* C
I33
NL
>—O
J<aOU1-z"
(VI(VI
(VIn»
(VIw inro • (V«• O IO*• II •«^£. ^1 Z 0z ro K~ nu. - oM u 13
(VI
ro
u u u u u u u u
234
o04n
50N
oII
roUj -
Z «n »-ro Ztort ou u<t inM Nro ro
o ro oII - IIJ Jz o zro h- ro
U. tort 3 -4
— O
•O(Mro
(J
UJ
Zcu
34N
L3
4M
K
oroUJ
so o<\J Nro ro
Z Zro roro rotort tort
U OII II
Jz<fnz « *-
to* u U
JZO"0tort
U
•
*z0>rotort .
U
J<a15UJKZ*«
33
MK
33
NL
MM fc«*
U OII IIX JZ Zo aro rotort tort
U U
-10•*tort
U
•Xzo
*tort
U
J4a19uHzM
33
MK
33N
L
tort tort
U UII II* -1z z0 O<f <fMl tort
0 U
CI5
6M
K,
CI5
6N
L
J<oroUJKztort
44
MK
M
UII*ztfmtort
U
_»
*•*to*
UIIJZ•ointort
U
-1COrO*•*
U
»
*Z00ntort
U
J<atouKZtort
*Z
rotort
UII*z00rotort
U
-1•«•rotort
U
MJ
CDro**4
U
-1zro«•*
tart
U
•>
*znw*
M
U
J<aoUJKztort
•OII*zro
««U
o u u o o o o u u u o u u u o u
235
Jz
o
oIIJ
EG
RA
L
rt mV* M
U UII II* _)z z
-1z00CM
28
MK
EG
RA
L
z-M
CMH4
u
JvOCMh*
u
Z !•««-> Z
M U O "»
* *z zX -I - * -I * * J•S. Z CM ZZ CM ZZ44 •— •*••< «•« I") f)•*•* U »O ro U r») f>
u uu u* Jz z
U U
U U>II II* Jz z00 00CM CM»-" «->u u IN
TE
GR
AL U U
II IIX _)
I*/CM fMM "xU U IN
TE
GR
AL
J
mCM
U
»
:s:mM
u_j<QC
OUJKz
^ uz zro com nu uII M* _lz zin mCM CM1-1 M
J
*(M•4
U
*z4CMim
U
J<aoUJKz
* _lz zn n(0 f>*^ tortU UII II^ Jz z4 4CM CMM M
-J
Omtart
U
*Zorotart
O
J<aoUJt-z
* -iz z* •** •*M M
u uII II* -Jz zo om 10•* »*
« o u -
O O O o u u u o u U O <J
236
jz•nCM
u•¥z"1CMu
U
-J
tro(U
zM
^ _J
Z Z— 1 Mro roMl Ml
O UII IIz zro roCVJ CMMl Ml
0 U
JroroMl
Uft
zroMl
W "^
* -1<o zMl ^
« •*CD «4- O
z t- ZI*) Ml
M. roU «ft (J
* ft* 5^ Ml
MI mu »* *»Ml CO
- X
CQ —ft 4.
4 ^X ^CD ro
^ UII X-» ZQC ro3 ro"> ••• U
X >0
« cc(/> 4>
x
*C
I3d
NL
+(A
/B)
Z<cinMl
Uft-0•*Ml
m* ~*< zX OCD roW Ml
4- OJ »Z V.0 Z•* 0
(J Ml
ft U
* ftZ NO0* "Oro «
o ^* i** vO•- inCO M«^ u4- ftII *— ZCt CO
-• > ro4- -> «a • o"^ X ^II "> CM*V " »•*Z T •«
> ~ 33">( / )*
Ml
Z
UftinM
^ft
CMMl
ft
4+-1
•M
Ml
Ml
Uft
zM
Ml
JJ
ft
<
Ml
4(
—
J^ft
CO•4>II
aMl B
4- "^ **a • j» « z"> x roII "> -a ^ hi
> *«*
9 w U-> J) ft
-*
6M
K*C
12
6N
L
NL
)
CM •"M. CMU •-ft UvO ft•N )£
» zQ -* CM• Ml
CM U4- ft
i*CM 4•• »u -
X *z »00 CDCM »Ml 4
U *» J« ZMl CO
« CM3 -.» U
— ft4 *X ZCC -
« Ml
+ (JII ftcc o
-« X •-4- -> Oor • ft
-> x on -> xa ™ S rff
9 ^
•> in *•Ml
OC
I23
NL
-K
A/3
)
5*C
I23
M<
^ <tZ -0 <ro *— CMu -* *>o *-• CDM *Q <it +- J< Zx inCO CM
+ U-I ftz *<r z>- CMU «ft U
* *Z vOin «M. Q
u *
— oMI ro0 M
~ U
* ftII *— zcr ro
** ^ CM+ ->-,-*ct • o _j> - « z-5 x \o roII "i CM CM
> ~ Q O") in * ft
- CM
I33
NL
+B
R1
6
CI3
1M
K*C
I31
NL
U ft
* —x az *<• coro *•— 4U «ft CM
Ml |
a j00 Z
-i •*z -— oro *Ml ^
U Z
* —* roZ -* (J
* *Ml V0
u <o* a- CO-I fta -»co co* X—, 44 ***X +0 Jw ZM *-. roMl Ml
- 3 U+ 1 *
0 - Z-» X rou •-> n
o — u"> t/5 ft
M
COX
4-
COro
u#
z<0inMl
U4t•0
a03 _lft Z*^ Qt4 roX «-CO U••» ft4. 5£
4 S0 <t
^ **Ml (J
u ** <0X <0z aCn COro *
Z zft <0CM inMl Ml
or uCO *u *
*•» zM. 00
-• > m4- •> —« • O> Ml *
^ >c M n CM
> — ro") W ft
•«
zro
U
\
Ml
(J
ft
ina4ftCM
ft
-1Z
.*Ml
y
JZro.4Ml
<Jft
%
aft
—•
«COn»»Ml
Ml f
4- nMl •
-> xII •»» 3" i/>
K*C
I26
NL
*(
A/B
A*B
*P
2*C
I21
M<
Z ft<3 CMCM »•* 1U J* Z
— CMa Mo v* *• >^CM Z4- MJ CMZ T J
"• UCM ftMl .3-
U <t# ax. <z *CO -CM MIMl ^
U *ft CO-* ft
a 4-O J» z-» CO4 CMX •-•CO Uw 4
II V— zMl M
— X CM+ ~) M
Ml • (J _)
X — ft Z•> X ^0 Ml
II "* <0 CMMl T QJ *•
X *- Q U~> in ft #
-" CM
I2
3N
L*(A
/B
)
5*C
I23
M<
U <t# a* 4Z *O CMn ~u »ft CDsO ftMl 4
a 4-0 _lft Z~ in4 CM
CO U•~ ft4- ^J Zz <t<t CMCM «M U
U »ft sD^ Oz a*n QCM 4>
U Zft 0ru roMl Ml
a uQ ftH *~ zM. ro
- > CM4- "1 "•
> - ft Z•» x & rol| -> CM CM
> — Q O- > < / ) » «
-. CMoo
O U O
237
>»
»•«>
•M
3
V
xM
a
sCD
ZZ
M (VJ ^
> # II
cr z x 3> z a•- » o z> <y o ~• n * +a w _ «3 >• *« •» O tlv •> o *
zz
II(M (M_J 3
ao zo •-
— N_l
O II
zz
* ** *Z Zz z* *II IIa a> B
tv
ZZ»
V*
II* * * * + » * ~ 4 f \ j r v j
Z Zz z* »
II IIa crx >•
z z zz z z# » »10 vf) N11 II I)
z zz z» *00 OII II
-« 2.a
o zo
> * X V
Za •»•
o z a>- o « 3* <t •«• ">
CVJz zn o n oz a z -»
->->n— — — — CM nf-"> o•> o
zNro
3TNnu
UJ
•0o
•COo
~ IIUJ
(f)o •« o" II
y zo z «K- N
n z w
0 ^•» • o— o ^— l| «-I _J1 Z OZ N. K
O UJII DJ Z
N *-rO Z
U . - , O « O U . « O » - O« — u o o o — u o u(\Jo
* tno o<t *
CD (o o
U O O U U
238
-Jz•nu
z
u
troUJt>z*•"
* _)z zN N.n m
u uii Mz zo *o1*1 "0•— l-lu u
Jm win -«*•< <£u -• ^* -z «in -in ••* (\j0 -
j -a *O 1UJ Z1— *•z u.
= 0
.
1415
=2
.*M
*K
*P
I**2
¥ ^z o zin H inin m« o «u o uN <f
•* <f
0
oc<t
Uj -.
Z J« 1K ZZ «-0 U,u «in<t
o <tli -Jz oin »-- ou o<5
<t
=2
.*N
*L
*P
I **2
UE
J ZZ -in H-m z•- oU 0
oo a« <f
zm
u
zin
o
y0UJKZ•"
(\i
CVJ
<VJ
<f
1z-»,li.•"
CVJ
00
•oin in cvi o o> ai
• CVJ • <f • C\J •^ < < t - u - - * -II — II 3 •» II — II* * Z -J J JZ O Z « 1 Z O Zi p ^ - i n H - z i n h - i nn n z ^ n -o« O « O U , - o «u o u u ^ u o uC\J <^ ifi vO CO
<f <t <t •* ^
z
u
z
*•*u
UJ J
Z K>-l IJK UJZ I-c zo •-a<J
=C
I35
MK
=C
I35N
L
^ _)Z Z
- <J1-4 ••
u u
U O O <J O U U !_> U
239
zsin
zfVJ<t
_J•*c\j
inc\i
*">•
XNvni—u_jQ;13Ut-z"•
•£s.ininuitzh*inM
U
_)zinmM
unzf*.m•«u
u»xCV)<t«•«u-JTfOUJh-z•••
i£zNro
UIIi£zrv)i— iU
JZ
n
unjzCJ<t«•«u
u•
zn<$•-<u-i<^oroUJ^>z>-<
J^zh.nuuz:*>
•*1-1O
jZNnuu-izto*MU
IJ
•
zm_i•—oja:UJt-z•H
OIIzm«rtM
u
onjzinW4
t-t
U
u•
ztv**4
M
U
JaijUJt-z"-"
v;ZinmyuzN»*i_iU
jZ>nn
on_jzCM*^M
(J
U
•
z(MM
U
JcrUJ>~z.. h»^
zNmunz<tPJM4
u
Jz(s.
noII-Jz<tOJM
u
u»
zinCM»•*
U
J
aalt-z1*4
i£ZNn
uIIyzinCMM
VJ
JzNf>
UIIJZinrj*•«u
o u u u u o u u u u u u u u o u o u u
240
z
u
z
tart
U
_l<a0UJKz•"
zinntart
UII
zroCVI•-u
zmntart
UIIJz1*1CVitart
U
30
MK
. C
13
0N
L
•rt
U
,J4oroUJKZl»ri
Xtnmtart
UII¥.zontart
U
-Jinmtart
uII-1zontart
U
22
MK
. C
I22
NL
tart
IJ
J
aoUJi-ztart
Xinfotart
UII¥
zCVJCVJtart
u
zinrotart
UIIJzCVICVItart
U
29
MK
, C
I29
NL
tart
(J
J
aoUJ
z•rt
Xinintart
UIIX0^CVItart
U
-1zmintart
UIIJzoCVJtart
u
?7
WK
, C
I27
NL
tart
uJ<orUUJ
ztart
XNrotart
(JIIzNCVJtart
u
NL
= •»
•< B
I I2
*C
I37
MK
*C
I36
NL
+(B
/A)*B
U6
*C
I55
MK
*C
I35
NL
+(A
/B
N. «-.ro atart 3
u ->II •J M
Z VN -)cvj ntart u m
K*C
I55
NL
*B
I66
*C
I36
MK
*C
I37
NL
)
X
ro
U
OCVJ
CO#M
tart
.+
a>->na>n
=+
( ( A
/e)*B
I22
*C
I41
MK
*C
I57
NL
+B
I26
*C
I42
MK
*C
I43
NL
+B
I26
~*a>n•
M«>
•>,
in
2N
L*(B
/A)*B
I66
*C
I57
MK
*C
I41
NL
>
tart
U
*z-0
tarty
*•rt
=*(b
*K
12
*A
I45
*C
I 1
5M
K*C
I 1
2N
L+
A*K
22
*A
I 5
5*C
I12
MK
*C
I IS
N
Aa.
— *•f ->or •3 ta.
-> >.ii -»a ">X w•> in
^4
+
orX•)ny.X••>
=+
(O
I l2
*C
I25
MK
*C
I24
NL
+(B
/A)*D
I16
*C
I30
MK
*C
I23
NL
+<
A/B
K*C
I30
NL
*O
I66
*C
I24
MK
*C
I25
NL
+A
*H
*K
12
*A
I45
*C
I23
MK
« Za. nX CVn ta<• o
^* ^3
~> (VJ-) *,^ Q<rt *
^rt
vrt
-» "f
J az yro ->(VI II
u >•# ->CVJ
u u o o u u u o o u o o u
241
CI2
7M
K*C
I27
NL
*{
B/A
*<0CMMl
O
*•CM4-Jz0CM•«*
U
*TCMCMMl
U
*CMCMMIQ»*•*OlX<N«*
**+II0«
a>i»
>
if\VJ
^
_iCMCMMl
U
*zCMCVJb*U
*mm<*CMCM^*B
*«r4.^jzCMCMMl
U
*z0*CM
—U
*•o•Ml
^DX<•4-
Z1
inro
u**zinmM
U
*£^*am4t*»<
£^*
4
4oroMl
U
*¥zp*.ro•*U4t
CM_
cr33M
M
»* ^
•f ->
3 «-> VII ~>
"^ irt' VI
_jZNro
U4t
Z•OroMl
U
*•0•oa•n4.jzininMo*<^zmn•H
O
•oCMcra;
K*C
I43
NL
*-B
R2
6
iCM<rMl
U
*>oCMaCO4>J
ZNinMl
(J
*
ZW
^»^u
*CMCMQ;CO4^^«03X<%^II
M
M >
•f ~»
> ~~> >
M T
* irt
*Z»4
*tf
U»a*CO
*<*CM»1jZM4-Ml
U
*zNinMl
U
**0oaCOw«•>
X2)»,4-
12CM
Ml
U»sm21u
*C
I12
MK
*C
I15
NL
inina<«CMCMX&<•f-JZCM
»«dU
*Zink^
U
*in
cr•CM*^
^*03II«*Ml
— »+ ~)
Z » «— •» >^ II ^
u * *-« ^% irt» wlCM
toX<+
roCMMl
U
**zoro.!-(
U
*£•4
aQ#<Xm*^4,
^CMMl
U
*¥zinCM•<j#CM•M
OfoIIMl
~ X4- ~)
^< •-<-> >II "
X -.^ (rt* VI
AR
45
*C
I23
MK
••»CM•4
^
*CD»<4,J
l/lCM
u
*z
CMMl
U
*<coorQ+J
zonMl
U
zCOCM
—i!oCMao
27
MK
*C
I27
NL
*(B
/A)
**«
u•oCMceo*•CM4jZoCMMl
U
*zCMCMM
U
*CMCMorQ
***ccX<^II
«•»Ml
•1 >•4- ->
Z V «n T >/\t ii *HW II »
•M *^ ^
U V -» *^ /A» WJJ
CM0O
^zCMCVM
U
*CMfl.«CD
*<
*CM
1
*CMCMMl
U«
zCMCMMl
U
*ininer
*CMCM
^*CD
*<+jZ x.CM —CM C*» Ku <* zJ£Z DOCM ID— f-
* Z J»0 CM 3
a - JQ U <» 4fc i I1C \
-. CM
Z Zz z» •
C M C M C M C M C M C M C M C M C M — - 1
* * * * * » « » # II || —# # * # * * # * * — — " ( M f M *^ ^ C Z Z ^ Z ^ l ^ Z ^ ^ Z O C CZ Z Z Z Z Z Z Z Z Q . Q . D
M ii ii ii n il it n it ii in 4 tn 4 nD > * X > 3 > B X > Z Z D- > - 1 - > - ) - > ~ > 1 " > 1 - ) O |l O II ~>
242
£
**U
»
zto*'
u
odJ
u*
u
*ID*
o a oII > II
•f • *a — ax n x
ii ii* _i
3 II-> a
II B IIa •> a
o an >or —x n" QC
•f •
3 II^ *> II
• *o —II x
• +o •-it >•
> II D II > II » II X II V
ooin
sX
-• n
- M2 u) tn
• O +<vj (/) in (vi (vi» — o » #
o » o M » #Z Z Z • • Z ZM Z ~ vC ~ Z Z(/) » ( / ) < - » - # *
O HI < W ")_J -• _l H Z II II_j ii j «- a -• tvi< - < a o z zu . z u * u. * *
oino
u o
z zy *» •
— mz z
* *II II
(VI (VI
* ** *Z 2Z Z« *N COII IIf^ <^
Z Z
* *
m inm ino o<Vl (VI
UJ
a or» B
243
CD CD
<•»"1•oM
U.••
U. II~ ~ 0»n N u.CVJ O-> cviUJ * • O
* ** K ""< UJ < OZ fcav V k.~ JL M»
a — cto a o ou, « u. om Kin <oo oCVI CVJ
V-
UJ
_) O< zU UJ
nn">n
IFIE
D
KE
NN
ED
Y -
PA
NC
U
ME
TH
OD
S(
I)
, N
2P
I B
.M3
PI A
, N
3P
I 8 .
N4
P I A
. N
4P I B
Q t- <O II ~z ~ a
M (VJo +* *Z M, .
< a coMl
uj Q aQ Z -D < Z
Ml *» <
_» -> —
a ~ a< II Zi -»V ^ I* • *J
:JJ Ct LUa a cc
in•» CVJ
a <t •ll_ • ^D*» O COO -i •CVJ U, 0
w < oO y 1.
t ^L< a ~UJ O U.a u, -0 0— i CVI
a MI
• •"i *>Ct Ml
a a• •
CVJ CVJa -a x• *•» »« ^ ««a • M.
o u. oro <» *
•n *- inQ y /^
^ UJ
< CC <UJ O UJa u. ctin o<vi n
znZ
CVIZ
z•
•*z•mz•
CVJ" Z•^ •
O x -»^L ^^
U, 0 M.
•* UO CO
M- in K
Z o ^t«i &cc < ccD UJ OU. Ct U.
0 0* m
**CO •*
< r*i\J
in u,in cvjin >-— <O v2< aUJ 0cc u.
in^^
< < < <* * * #a a o. a
— ^ eg r> <tJ* T Y T* Y<T * * *C i.Ml H l| |l l|
n a a a aMl *rt (\J f) ^
a z z z z
3D CD CO» # *
a a a- cvi nZ 7 ^^ zII II IIB CD (t!
a a a— cvi mz z z
(NIP
I8)+
WR
2*C
OS
(M2
PI
A)*
CO
S(N
2P
PIB
)+
WR
4*C
OS
( M
4P
I A
) *
CO
S( N
4P
I B
)
i/> no zo —* m~ o< uMl *
a ->CD Z -* ^ aa o z•* » 00Z . M
•* On cr uco a *
a t- a:•* a az a +
(N1
PI6
)*-W
I2
*C
OS
(M2
PI A
|*C
OS
(N2
PP
IR)*
WI4
*C
OS
< M
4P
I A
)*C
OS
CN
4P
I8)
5
oo n •O Z 0u — #* i/> *~ Q —< U CVJ
M- » *a - *Z Ml Ml
— a *o z cviu — ** in **•» i— « O t—— O Ta * aH IM
PI %*
K Ml ||
*•* a H* -f *
„H
^, K
<o a
II K* Ml
^ ^0 IIx aa cc
U U
244
»9 <a I•" az »H 94 I"II CO< J£ UJa o
0UL
I/)JUJQ•<Ia— »0\o
«k
o«^UJ
»a
o••4
U.
IIOu,
oa,
umu0
w
•<t0M
u.•IIIa
vw^<zttou.oo
•rt
>OXB
*in>o4,•cUl
MorB
**in•CM
ID••.H
^OXB
K
• O -•«-> — Xt- UJ< oZ t- _J2 _J Co o « ;u. o u iin oo o
X
B
0
*O •^ **• •
in*•on• >o—•oIIO2 •<
aou.<s> xau ^»- n^ • •a vo *». ^_J UJ <
3 o - aLJ Z B U.
inn
egz.
»9
Z
*»
CMZ*4
ZB•
.*Z*zB*OCVJrvjnazUJ•oCM•
inQ
<
UJa:o,.
fMZ•
CMX•
^^
— Z4" *• _•o zM »»u. o•^ ro
— •>- in3t O£X <O UJu. aoCM
< 03in * #
- . <t « -m - • a a— <5 II 0 •» #<* — -># «- -«*<i — ^ m » z 2._ _ o — *m * M I I M< »o i — • o — < az n - T v o + v-*-a n ^ > i x x a ao — c n n n n M — —u . a o > - c : i x x < z 2o *oro r*)
*•<H
a#C«JzII<N^
aCM£
03*N-l
a*COzIIItort
a<MZ
oaCMz
ou
azinou*z.zB*«*CDM
a••4
Zs^
COou*"<•-Ia-4
2
•i"
coou4t_
Z
—z5IIX
WM
2N
2*
CO
S (M
2P
IA)*
CO
S(N
2P
IB )
+^ccl-la*•*
2>^toou*»»<tort
aCVJz*COo ~O B
» —•« CO2 1)CM «^Z IIB -•f i*
B•
CD»
<«^O
•>
o— •£>UJ f)^»^^ r~*Ct h-B-» O- oo —• oo •• ~*
^— •-J K
— i •B <•~ .U- U.
*•
•O
—iU.n ui
— DI- Z4 M
Z H-I Zc oa. vj
0 0* 0
*
h-0 «-
— XU.'oK- J
Jo <o u
0rJM
U
2 4 5







