
Motion Planning in Dynamic Environments
Two Challenges for Optimal Path planning
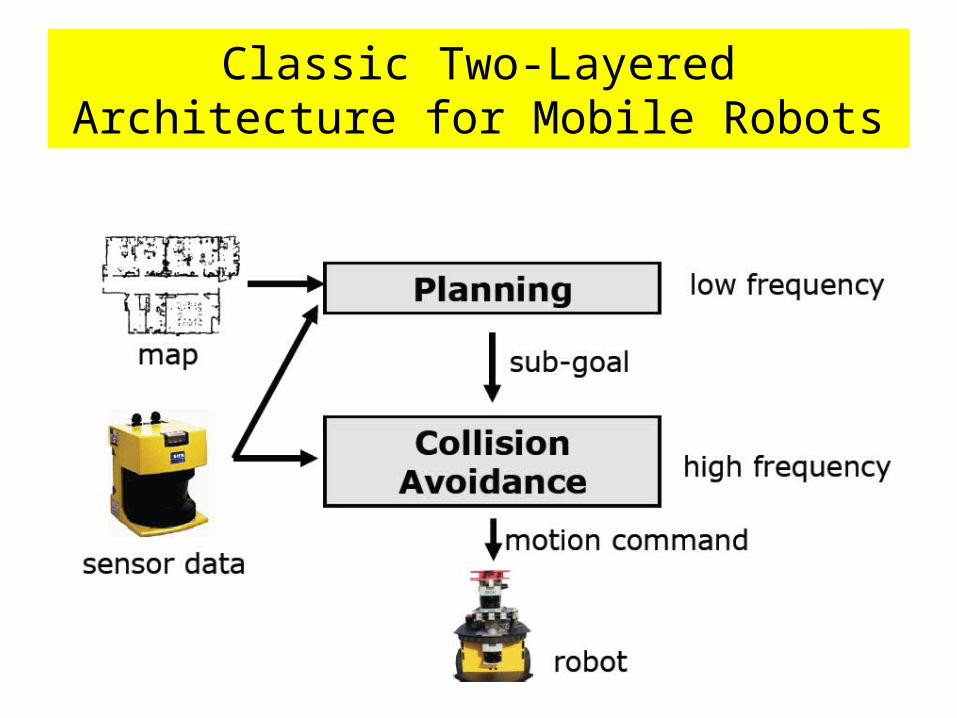
Classic Two-Layered Architecture for Mobile Robots

Dynamic Window
Approach (DWA)
Dynamic Window Approach
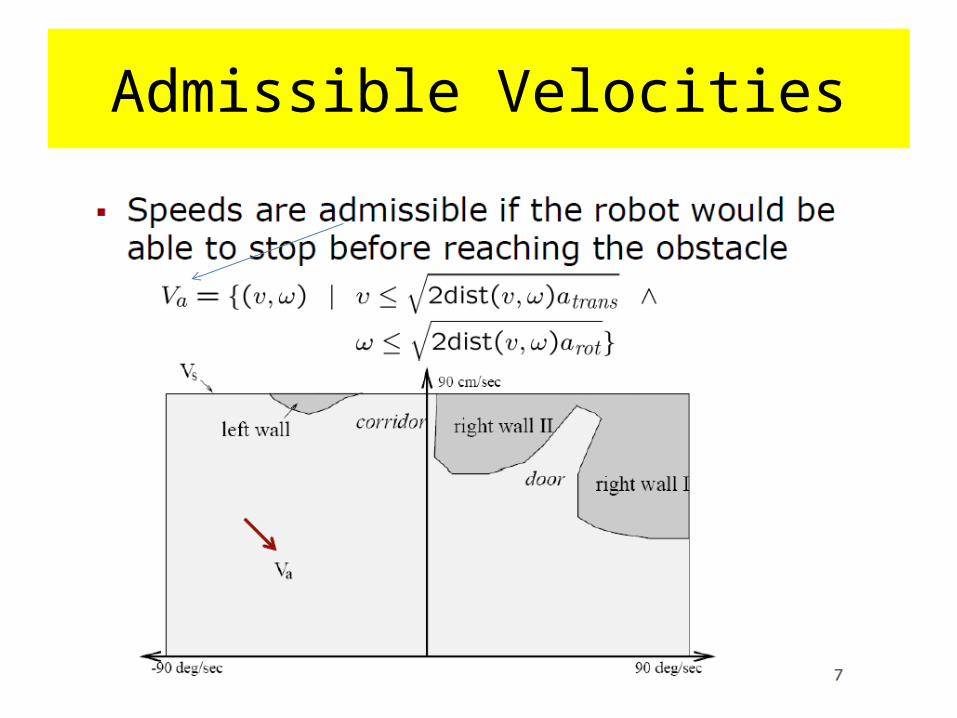
Admissible Velocities

Reachable Velocities

DWA Search Space
Dynamic Window Approach
Dynamic Window Approach

Dynamic Window Approach
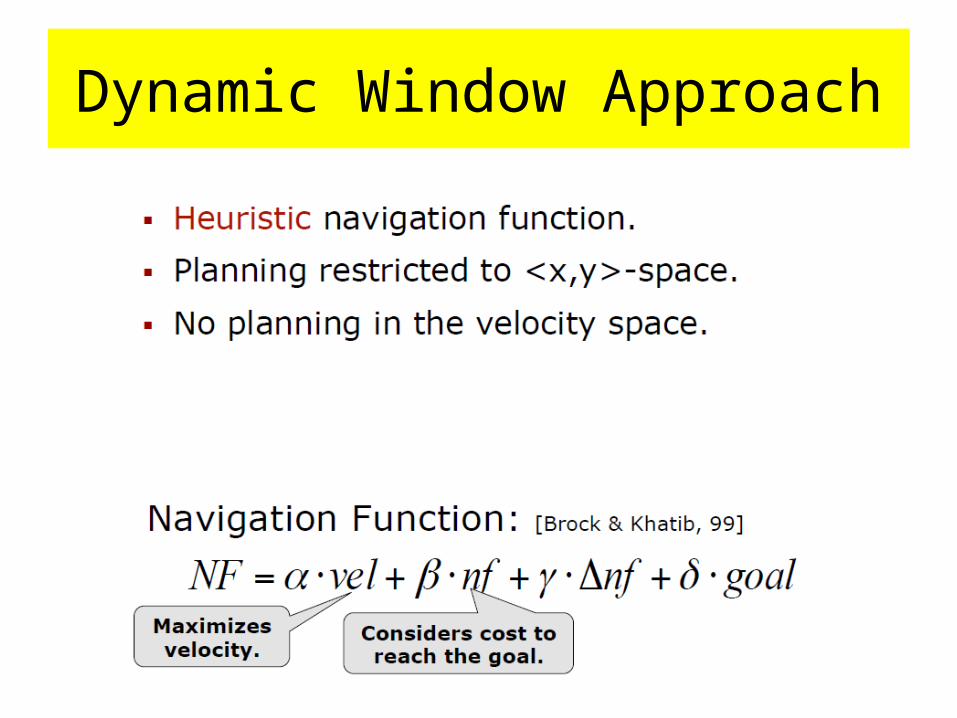
Dynamic Window Approach

Dynamic Window Approach
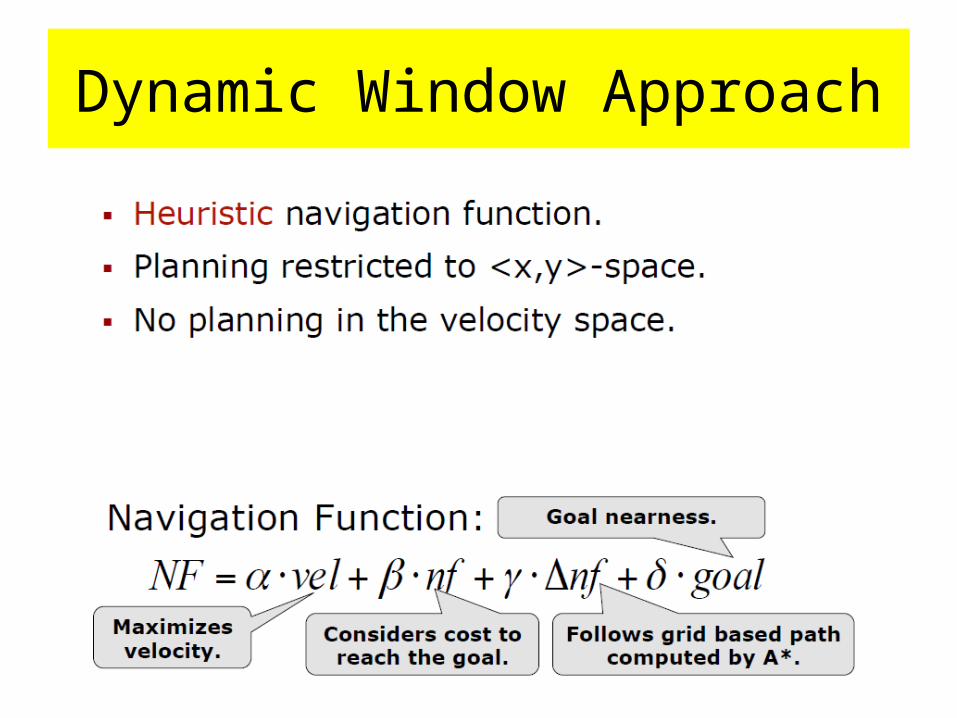
Dynamic Window Approach
Dynamic Window Approach: PLUSES of this method

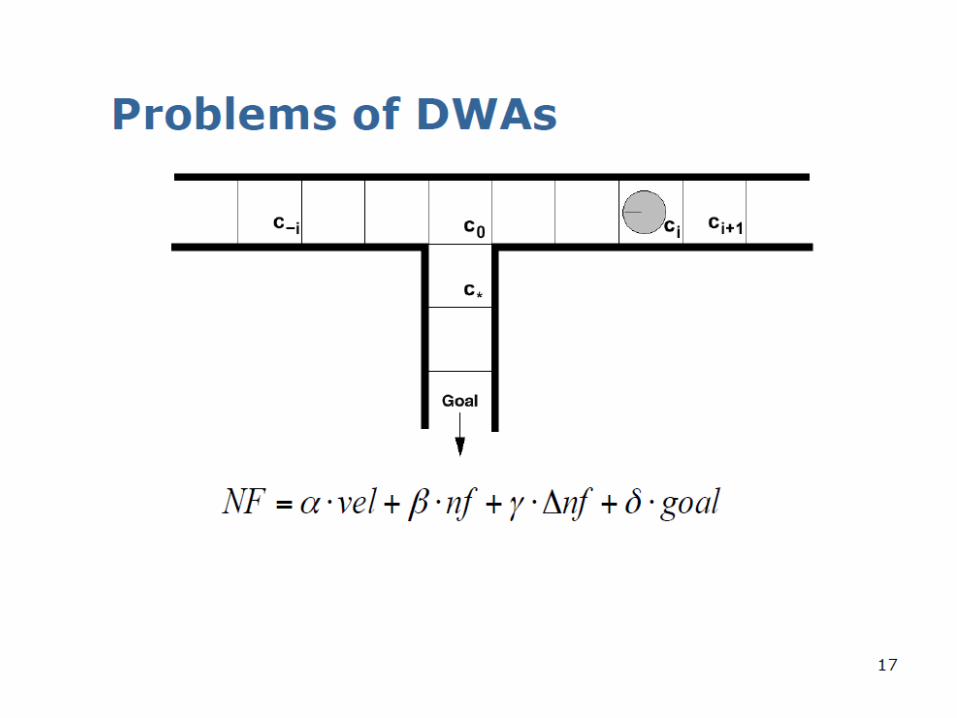
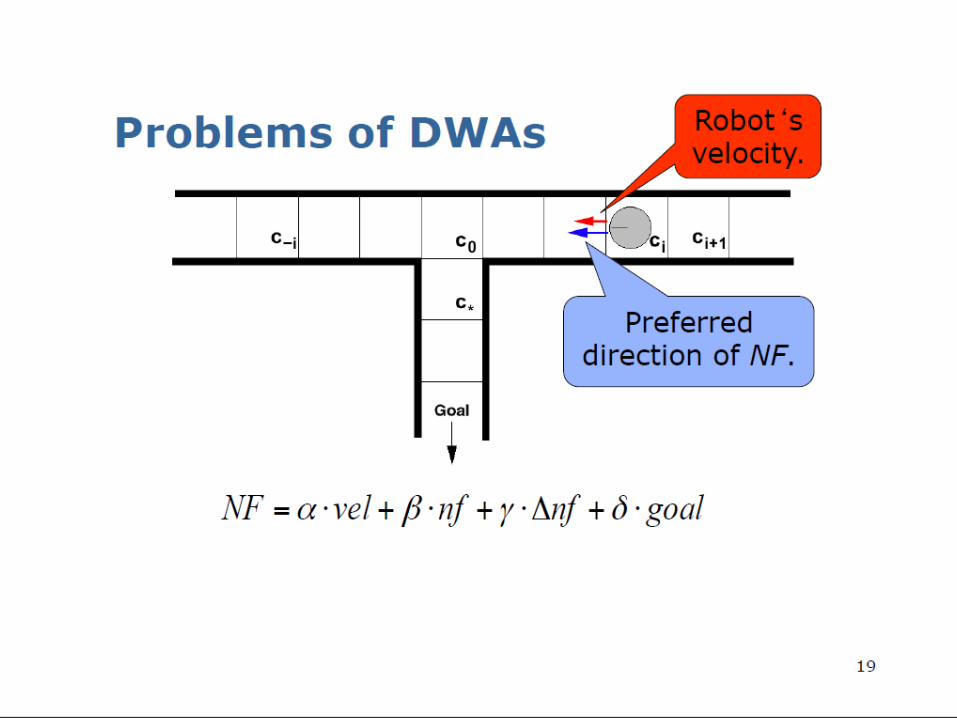
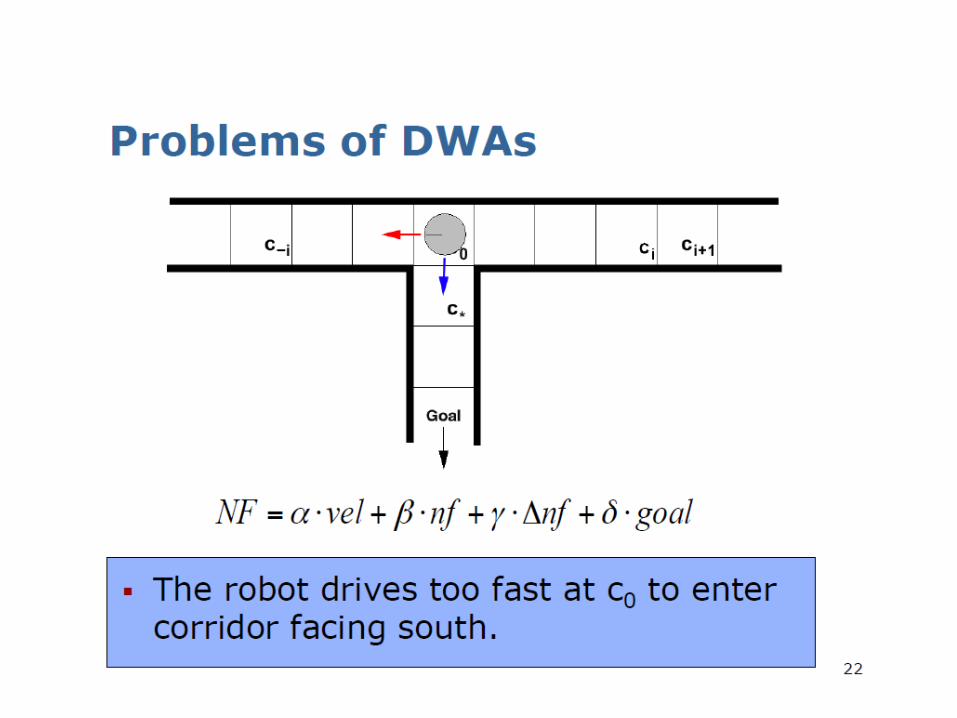
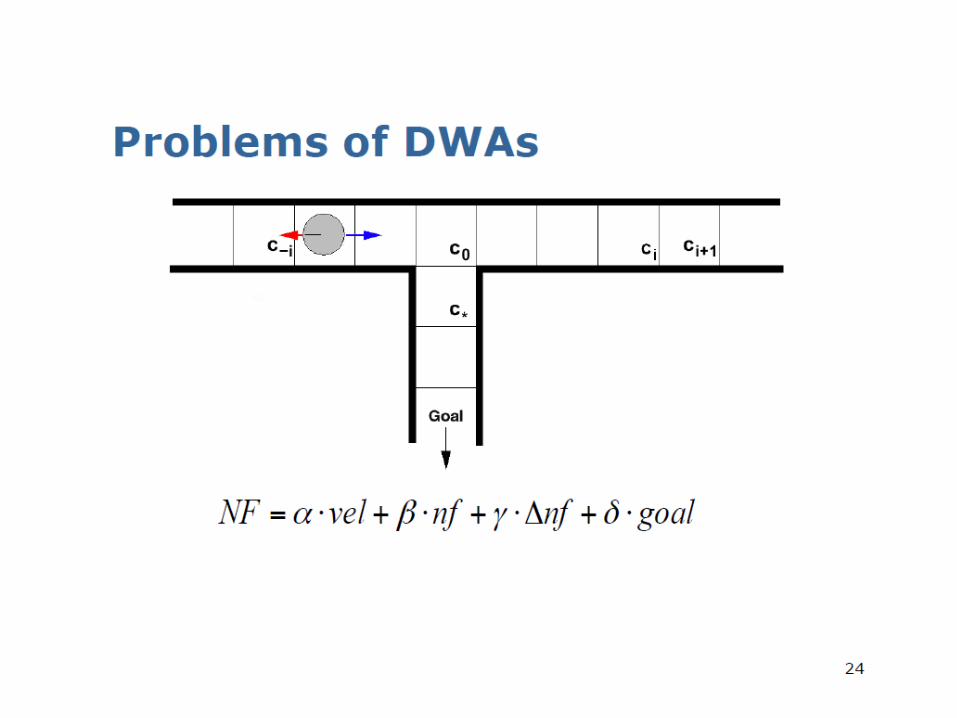
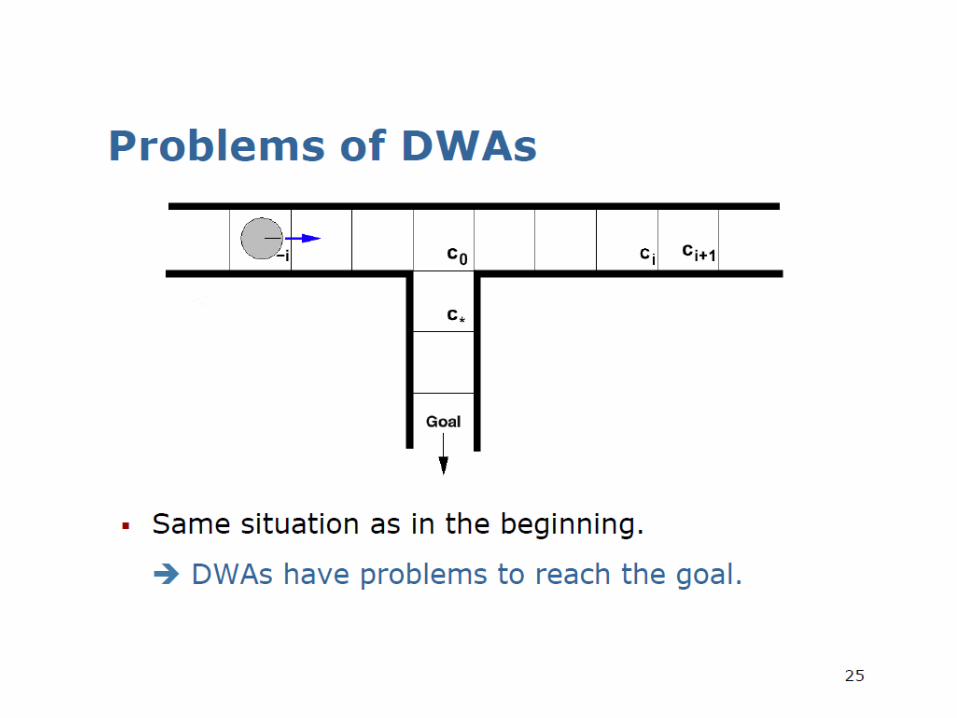
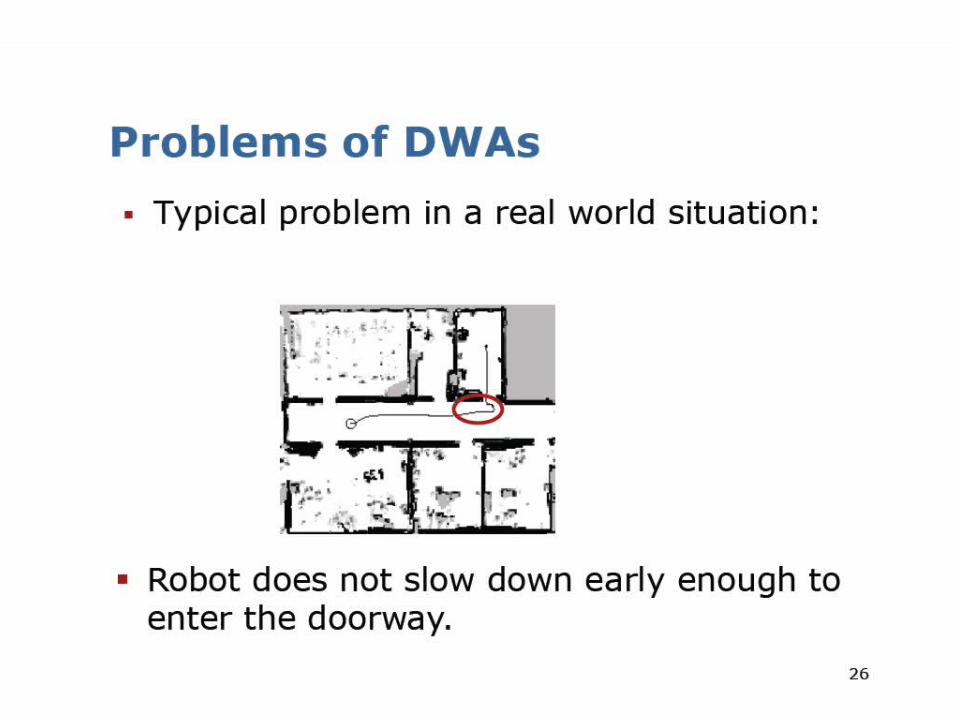
Problems of DWA





Robot Path Planning with A*
Robot Path Planning with A*

A*: Minimize the estimated Path Costs

Example: Path Planning for Robots in a Grid-World
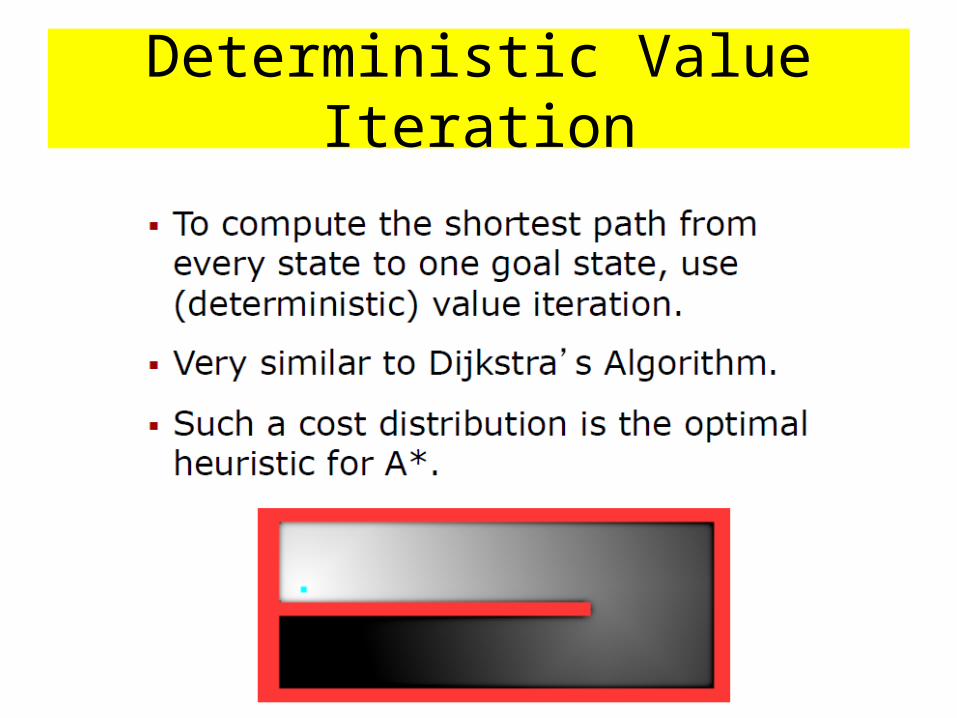
Deterministic Value Iteration

Typical Assumption in Robotics for A* Path Planning

Problems with A* for robot path planning
Convolution of the Grid Map
Convolution of the Grid Map

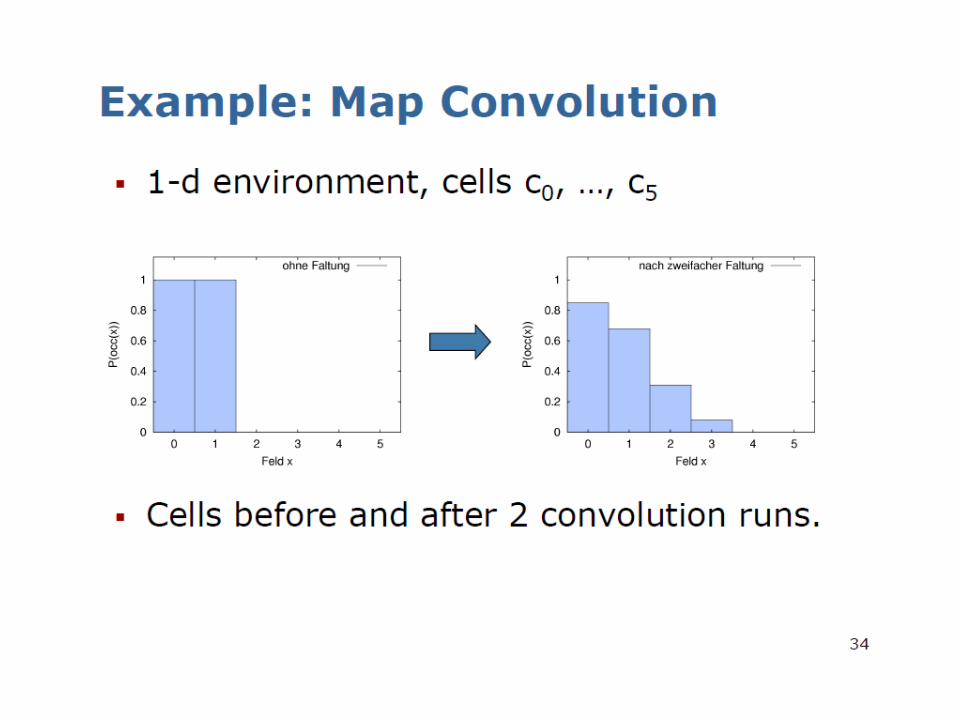
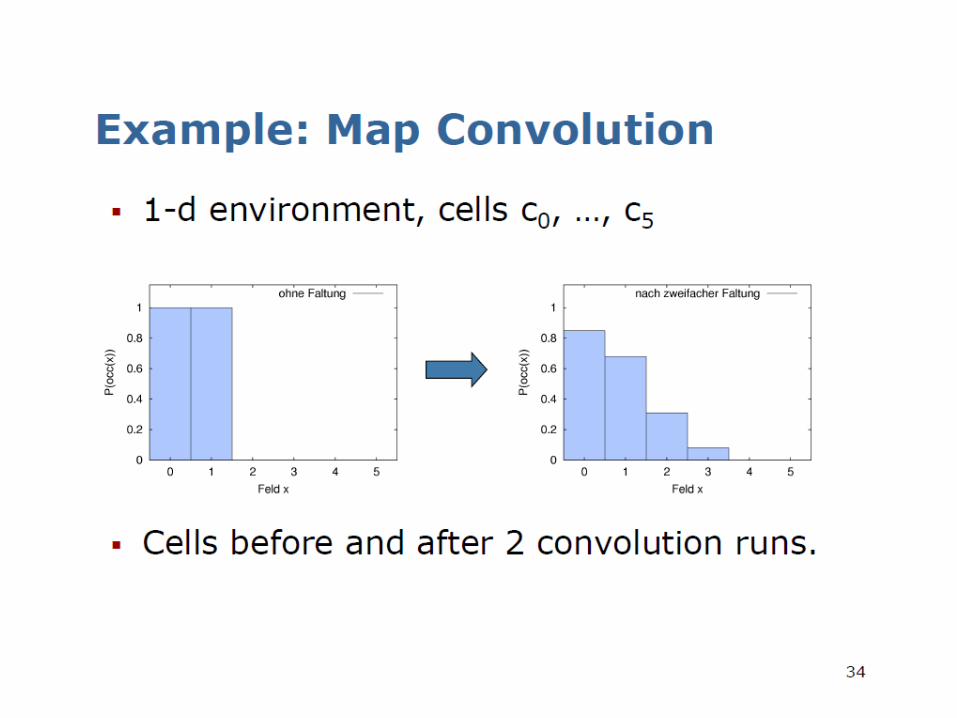
Example: Map Convolution
5D – Planning. An Alternative to Two-Layered
Architecture

The Search Space

The Search Space Problem formulation
The Search Space Problem Formalization (2)
• What is the problem?• What is a solution?

The Main Steps of the 5D algorithm

Updating the Grid Map
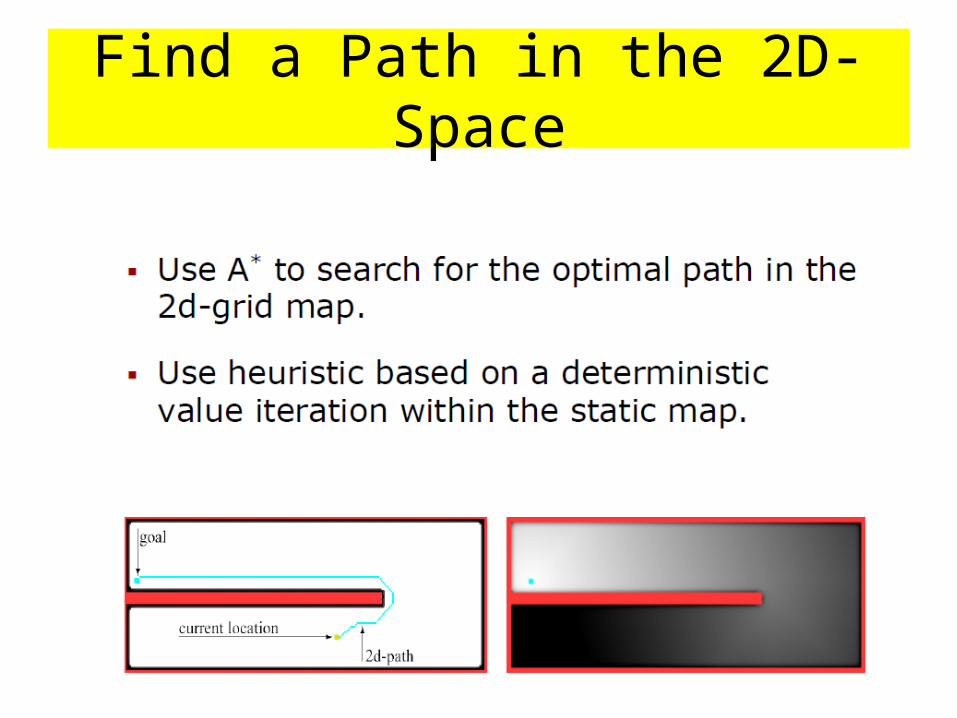
Find a Path in the 2D-Space

Restricting the Search Space

Space Restriction
Find a Path in the Five Dimensional Space
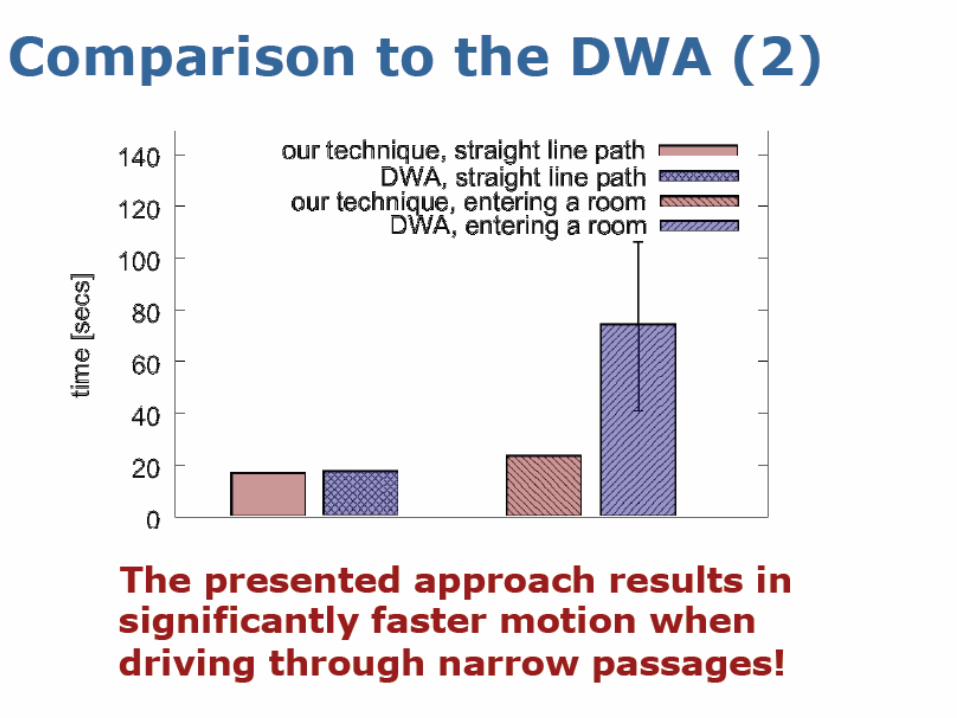
Example and Comparisons to other
approaches
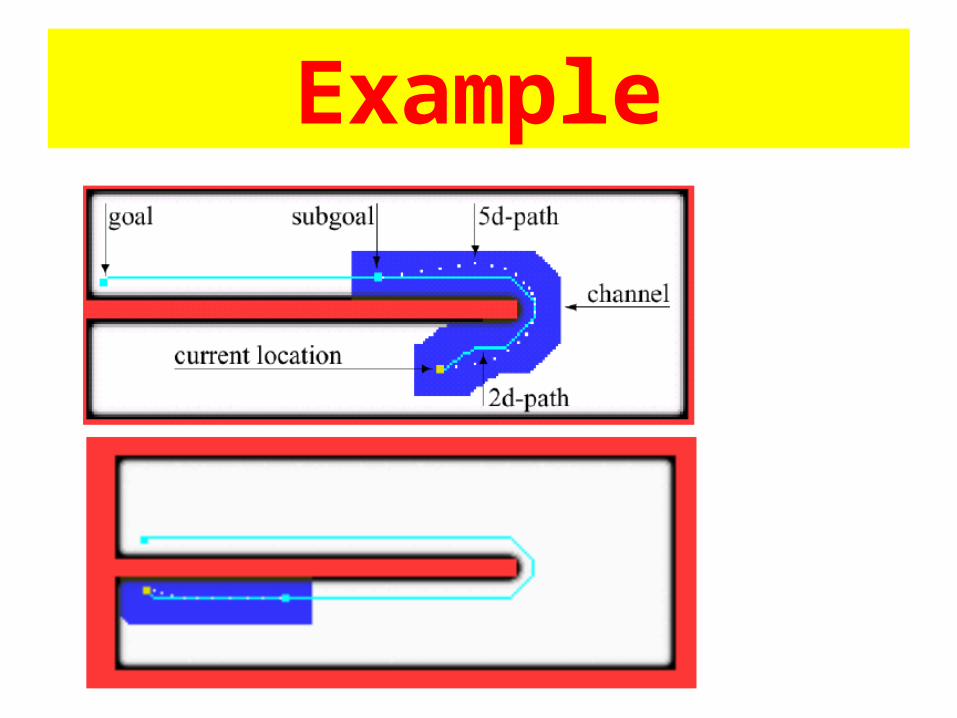
Example
Timeouts
Alternative Steering Command
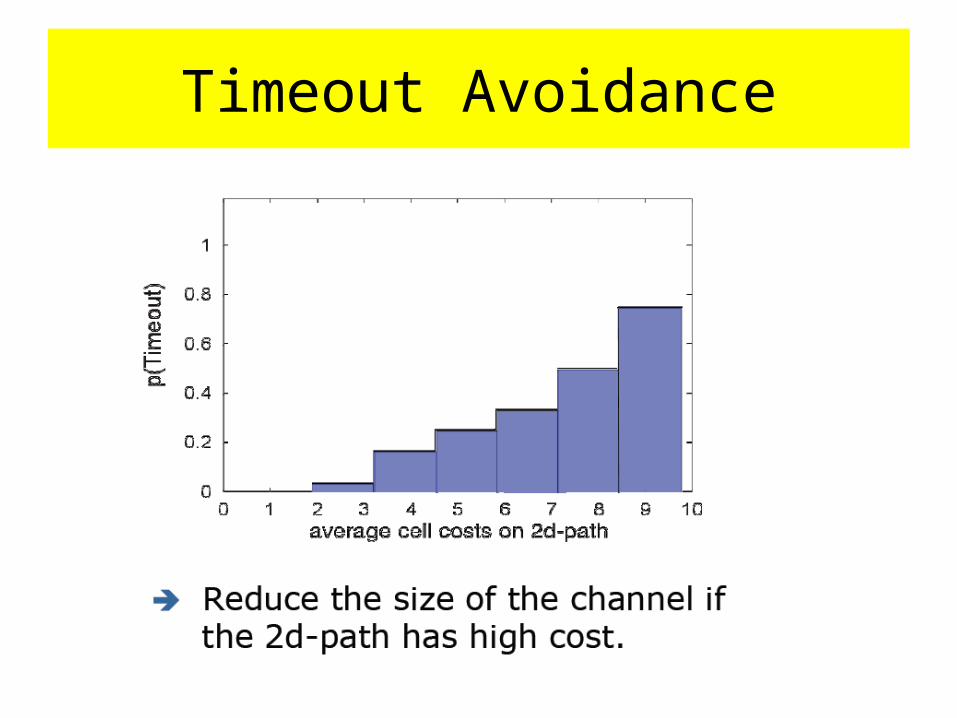
Timeout Avoidance

Another Example and Comparisons




Summary
What else should be discussed?







