
Kandidatprojektet Skrivuppgift
Mattias Krysander* och Mikael Rosell**
*Datorteknik, **Valla biblioteket

Kandidatprojekt i elektronik, 16 hp
2
• PRA1 (U/G) Projektarbete 11 hp
• UPG1 (U/G) Skriftlig rapport 2 hp
• UPG2 (U/G) Etik 1.5 hp
• UPG3 (U/G) Presentation o opposition 1.5 hp
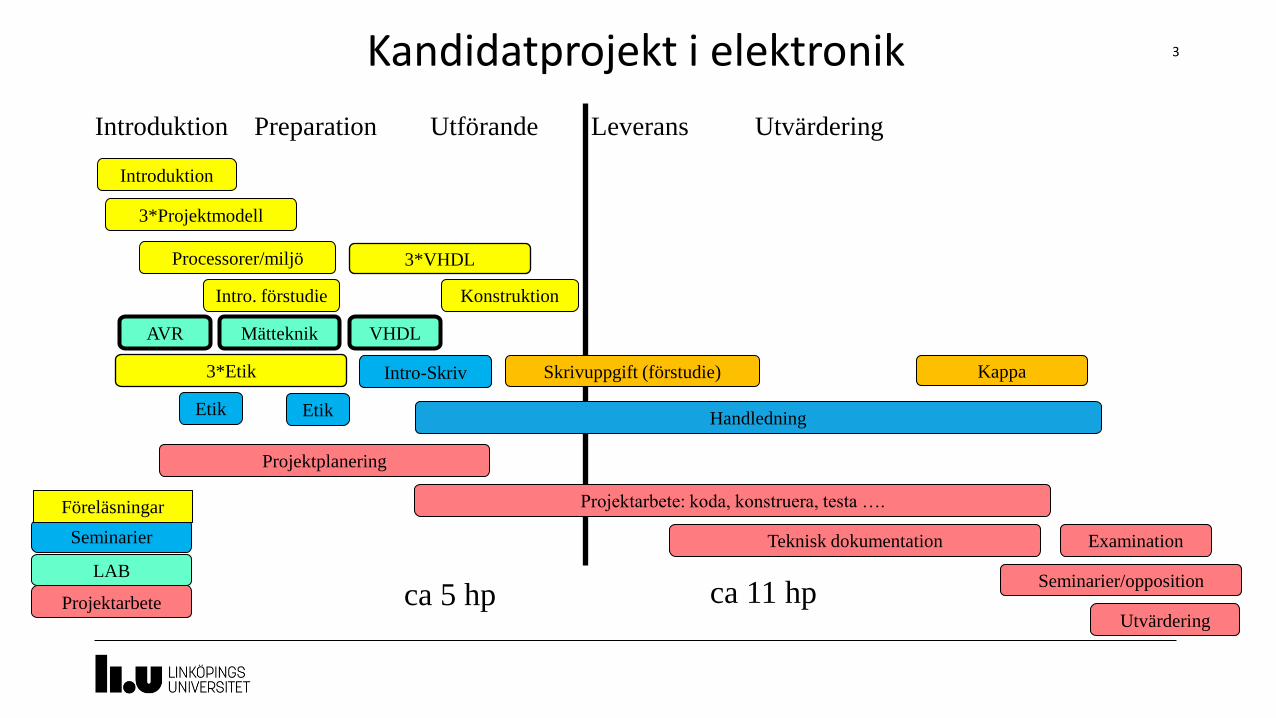
Kandidatprojekt i elektronik
Introduktion
3*Projektmodell
Introduktion Preparation Utförande Leverans Utvärdering
3*VHDL Processorer/miljö
VHDL
Seminarier
LAB
Projektplanering
Projektarbete: koda, konstruera, testa ….
Teknisk dokumentation Examination
Projektarbete
Seminarier/opposition
Utvärdering
AVR
Handledning
ca 5 hp ca 11 hp
Konstruktion
Skrivuppgift (förstudie) Kappa 3*Etik
Föreläsningar
Etik
Intro-Skriv
Mätteknik
Etik
Intro. förstudie
3
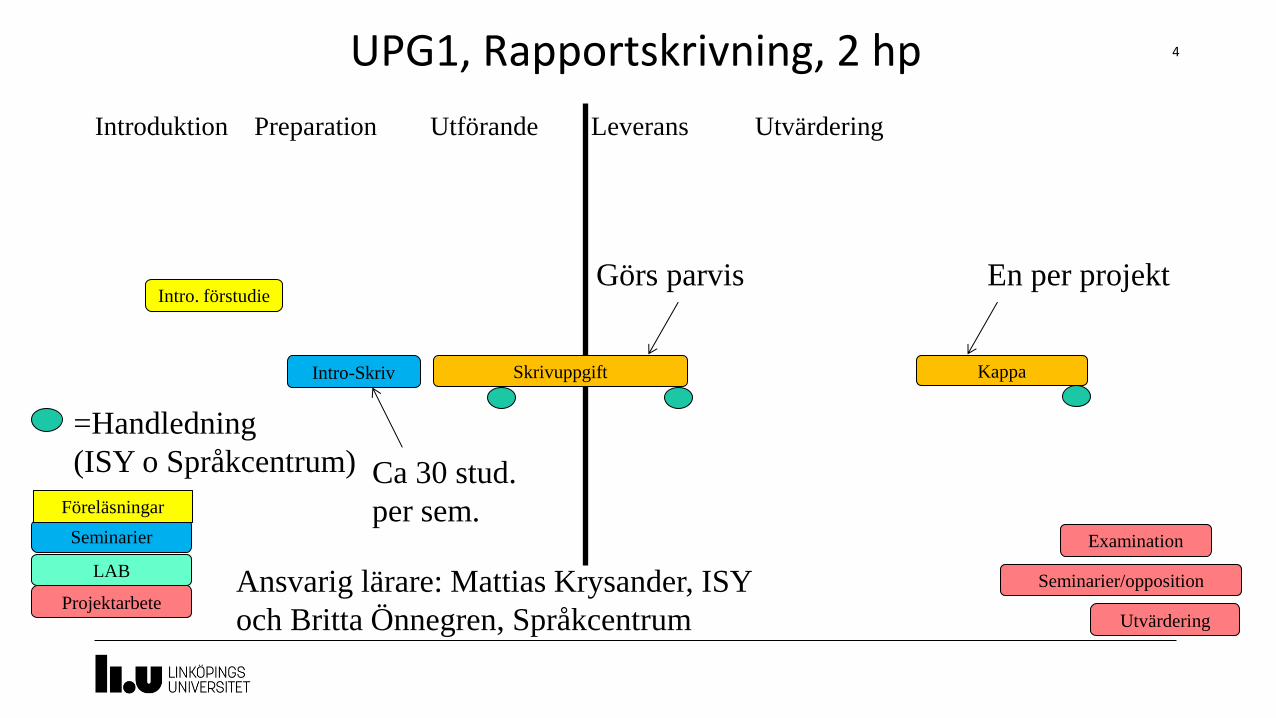
UPG1, Rapportskrivning, 2 hp
Introduktion Preparation Utförande Leverans Utvärdering
Seminarier
LAB
Examination
Projektarbete
Seminarier/opposition
Utvärdering
Skrivuppgift Kappa
Föreläsningar
Intro-Skriv
=Handledning
(ISY o Språkcentrum) Ca 30 stud.
per sem.
En per projekt Görs parvis
Ansvarig lärare: Mattias Krysander, ISY
och Britta Önnegren, Språkcentrum
Intro. förstudie
4

Innehåll
5
• Introduktion av skrivuppgiften
• Beskrivning av valbara skrivuppgifter
• Skrivprocess kommunikationsflöde
• Rapportens utformning
• Referenshantering
• Litteratursökning: vetenskapliga publikationer
• NoPlagiat: frågor & funderingar?
• I mån av tid: Inspiration från tidigare skrivuppgifter

Syfte och mål
6
• Syftet med skrivuppgiften är att få möjlighet att individuellt träna och få återkoppling på tekniskt skrivande såväl innehållsmässigt som språkligt.
• Målet med uppgiften är att introducera vetenskapligt och tekniskt skrivande och förbereda inför bland annat examensarbetet.

Skrivuppgiften
7
• Arbetsinsatsen för skrivuppgiften ska vara ca 40 timmar per person (ingår ej i projekttiden).
• Görs parvis
• 10 A4-sidor (15 A4-sidor om det är tre studenter)
– försättsblad, projektidentitet, innehållsförteckning och dokumenthistorik ska ej räknas in bland de 10 sidorna.
Val av uppgift
8
• Varje projektgrupp ska välja
– en regleruppgift,
– en sensoruppgift
– en kommunikations/konstruktionsuppgift.
• Om ni är en grupp på 8 personer får ni välja ytterligare en uppgift av valfri sort.

Regleruppgifter
9
1. Vilka övergripande styrmoder är nödvändiga för att roboten ska kunna utföra sitt uppdrag? T ex köra rakt i korridor, svänga i korsning, styra efter tejp, etc. Vilken information/mätdata behövs i de olika moderna? Hur kan man reglera roboten i de olika styrmoderna?
2. Hur kan man söka av ett rum/labyrint/omgivning på ett effektivt sätt? Beskriv olika kartläggningsalgoritmer. Hur beräknas den kortaste vägen till en punkt?
3. Vilka gångstilar är möjliga för vandrande robotar? Vilken/vilka gångstilar är lämpliga för er uppgift. Hur kan man reglera en vandrande robot som ska ta sig igenom en labyrint? Vilken gångstil orsakar minst mekaniskt slitage?
4. Hur ska man reglera position, hastighet och orientering på en flygande farkost? Vilka mätsignaler behövs i olika flygfall? Hur ska signalerna användas?
5. Vilka manövrar är möjliga för ett framhjulsstyrt fordon? Hur kan fordonet styras för att ta sig till en viss position, t ex vid fickparkering eller backa in i ett garage?
Sensoruppgifter
10
1. Vilka sensorer finns det som stöd för att roboten ska kunna utföra sitt uppdrag? Hur fungerar dessa? Finns det olika typer? Beskriv fysikaliska principer, mätnoggrannhet, störkänslighet, prestanda etc. Vilka sensorer är lämpliga att använda?
2. Hur skulle man kunna använda en kamera för att navigera i ett vägnät eller labyrint, utforska en ”kartvärld” eller att följa en linje? Vilka ”skyltar” kan vara lämpliga för identifiering? Vilka algoritmer finns? Finns det färdiga programpaket? Vilken upplösning behövs? Hur mycket beräkningskraft behövs?
3. Hur kan man skatta sin position och omgivning med bland annat en roterande laser? Vilka algoritmer finns? (SLAM)

Kommunikation och konstruktionsuppgifter
11
1. Beskriv olika principer för kommunikation mellan processorer. Prestanda, funktion , robusthet, etc (SPI, I2C, …). Vilken/vilka lösningar passar er robot?
2. Beskriv olika principer för trådlös övervakning/styrning av er robot. Prestanda, funktion, robusthet, säkerhet etc. (Blåtand, Wifi, Zigbee..).
3. Säkerhet i kommunikationen. Utvärdera olika kommunikationslösningar och jämföra dem. Hur säker är kanalen? Vilken lösning är bäst för er, och varför? Kan den avlyssnas enkelt? Kan en angripare skicka falska styrkommandon? Hur störkänslig är kanalen?
Kommunikation och konstruktionsuppgifter
12
4. Hur utvecklar och testar man ett realtidssystem som innehåller flera moduler/ processorer? Integration? Med eller utan operativsystem? Olika programstrukturer? Avbrottsstyrning? C eller assembler? Varför modularisering? Hållbar utveckling? Om ni skulle kommersialisera er robot i 100-tal eller miljontal, hur skulle ni byggt den då?
5. Hur gör man den elektriska konstruktionen stabil, störningsfri och strömsnål? Är det någon fördel med ett producerat kretskort? Reflektera runt avkoppling, jordplan, olika jordar, parallella kablar etc.
Kommunikation och konstruktionsuppgifter
13
6. Batteri. Hur fungerar de batterier som finns på er robot? Vilka problem kan spänningsvariationer orsaka? Hur kan roboten göras robust mot eventuella spänningsvariationer? Hur kan batteriets laddningsnivå övervakas?
7. Styrdon. Studera styrservon och drivkretsar. Hur fungerar ett servo? Hur kan man effektivt styra många servon samtidigt? Hur kan man styra en robotarm utan att den ”rycker”?
Val av uppgift 14
Valet skickas senast den 30 januari, kl 16.00 till er beställare och kan se ut som följer
•Regleruppgift nr1 person1, person2
•Sensoruppgifter nr1, nr2 person3, person4
•Kommunikations/konstruktionsuppgift nr3 person5, person6
där nr1, nr2, nr3 anger valda uppgifter och person1, …, person6 vem som ska utföra respektive uppgift.
Ni får gärna komma med egna förslag på uppgifter.
•Tilldelning av ISY och Språkcentrum-handledare
– ISY-handledaren läser och bedömer det tekniska innehållet.
– Läraren från Språkcentrum läser och bedömer det språkliga.
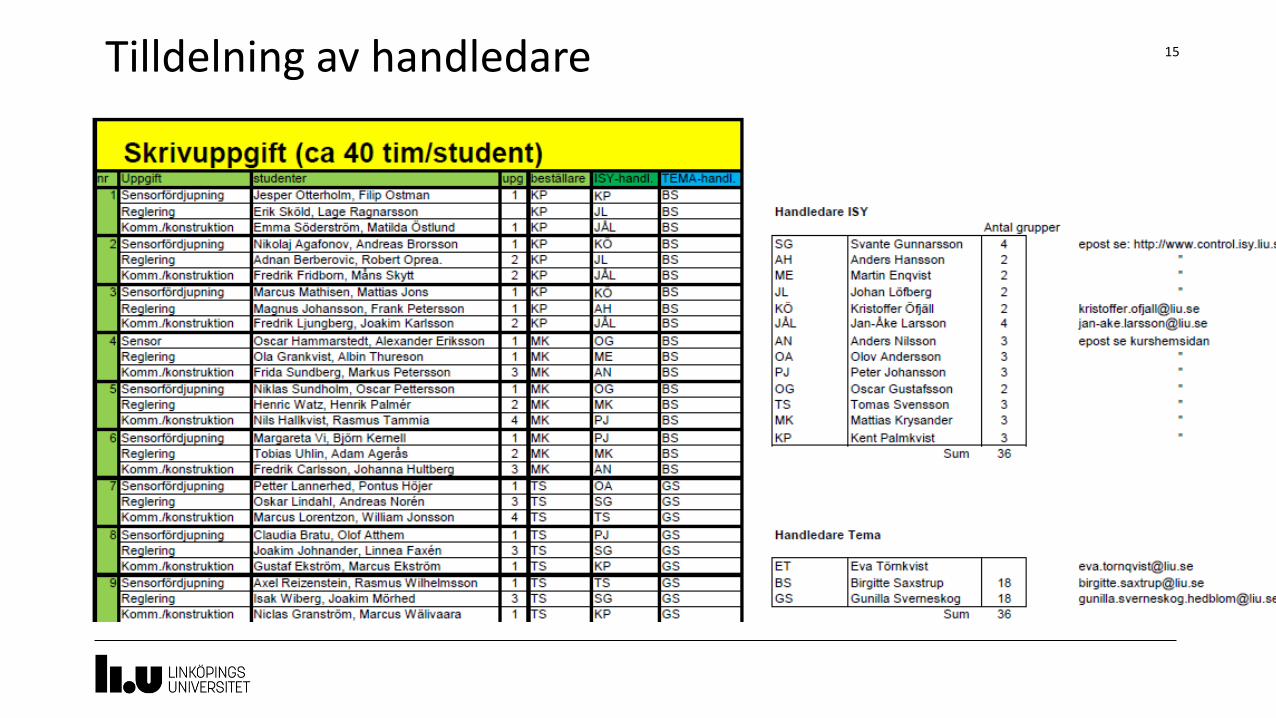
Tilldelning av handledare 15

Kommunikationsflöde 16
Version 0.1
Student
ISY-handledare
Språkcentrum-handledare
Beställare
Version 1.0 Version 1.X
Skrivuppgift skickas per e-post med titel: Skrivuppgift, grupp nr, yyy-uppgift där yyy ersätts med sensor, regler, kommunikation eller konstruktion. Återkoppling muntligt eller skriftligt
Handledaromdöme: Godkänt eller komplettering
Eventuella iterationer med ISY-handledare
Beställare beslutar om uppgiften är godkänd eller underkänd
1 mars 8 mars 23 mars 10 april 18 april 20 april 30 jan
Val

Första utkastet, version 0.1
17
• Ni ska skicka in er första version (minst 5 sidor) senast den 1:e mars till era handledare (både ISY och Språkcentrum) och er beställare.
• TÄNK PÅ: Ju högre kvalité texten håller desto intressantare kommentarer kan ni få.
• Handledarna från Språkcentrum ger muntlig återkoppling 7-8 mars (20min). Återkommer med information om bokning av tid.
• ISY-handledare ger muntlig eller skriftlig återkoppling.
Slutleverans
18
• Den färdiga skrivuppgiften skickas senast den 23:e mars till era handledare (både ISY och Språkcentrum) och till er beställare.
• Vi rekommenderar att ni läser och kommenterar varandras rapporter inom gruppen innan ni skickar dem till era handledare. Tänk på att samtliga skrivuppgifter ingår i den sammanställda kandidatrapporten.
• Ni får skriftliga kommentarer från era handledare senast den 10:e april.
Handledningsresurser
19
• Handledningsresurserna uppgår till ca 2 timmar/uppgift
• I detta ingår att läsa version 0.1 och 1.0 med avseende på det tekniska/språkliga innehållet och göra en bedömning.
• Använd handledartiden väl.
– Eget arbete
– Eget ansvar för kvalité
– Handledare ger goda råd och ska ej ”rätta upp”.
Rapportens struktur
20
Ett förslag på disposition följer nedan.
1.Inledning (Sammanhang, motivera frågeställning, relaterade arbeten, avgränsningar)
2.Problemformulering (frågeställningar som rapporten ska behandla)
3.Kunskapsbas (litteratur, datablad, dokumentation, bakgrundsteori, etc.)
4.Rapportens huvuddel (modeller, beräkningar, analyser och eventuella experiment)
5.Resultat och slutsatser
6.Referenser
•Appendix
Punkterna 3 och 4 kan med fördel anpassas till den specifika uppgiften och delas upp i lämpligt antal avsnitt med lämpliga rubriker.

Referenssystem
21
• Institute of Electrical and Electronics Engineers (IEEE) är en sammanslutning av ingenjörer och vetenskapspersoner från ca 175 länder och tillför omkring 30% av världens litteratur inom de elektriska och elektroniska ingenjörs- och datavetenskapliga områdena. IEEE har utarbetat standarder och i skrivuppgiften ska utformningen av referenser följa IEEE-standarden [1,pp. 34-48].
• Word: IEEE – Reference Order
• Latex: Package ieeetran
[1] IEEE, ”IEEE Editorial Style Manual,” 22 juli 2016. [Online].
Tillgänglig: https://www.ieee.org/documents/style_manual.pdf. [Använd 22 januari 2018].

IEEE-standard
22
Citiation standards in this reference are provided for:
Books Online Sources
Handbooks, Reports Patents, Standards, Theses, Unpublished
Manuals, Software Periodicals
Conference Papers References
Books
Basic Format:
[1] J. K. Author, “Title of chapter in the book,” in Title of His Published Book, xth ed. City of Publisher, Country if not USA: Abbrev. of
Publisher, year, ch. x, sec. x, pp. xxx–xxx.
NOTE: Use et al. when six or more names are given.
Examples:
[1] B. Klaus and P. Horn, Robot Vision. Cambridge, MA: MIT Press, 1986.

IEEE-standard
23
Periodicals
When referencing IEEE Transactions, NOTE: the issue number should be deleted and month carried.
Basic Format:
[1] J. K. Author, “Name of paper,” Abbrev. Title of Periodical, vol. x, no. x, pp. xxx-xxx, Abbrev. Month, year.
Examples:
[2] R. E. Kalman, “New results in linear filtering and prediction theory,” J. Basic Eng., ser. D, vol. 83, pp. 95-108,
Mar. 1961.
[1] L. Breimann. (2003). Manual on Setting Up, Using, and Understanding Random Forests v4.0. [Online]. Available:
http://oz.berkeley.edu/users/breiman/Using_random_forests_v4.0.pdf, Accessed on: Apr. 16, 2014.
[2] M. Kuhn. The Caret Package. (2012) [Online]. Available: http://cranr-project.org/web/packages /caret /caret.pdf
[3] Antcom, Torrance, CA, USA. Antenna Products. (2011) [Online]. Available: http://www.antcom.com
/documents/catalogs /L1L2GPSAntennas.pdf, Accessed on: Feb. 12, 2014.
Manuals/Software

IEEE-standard
24
References
NOTE: Use et al. when three or more names are given.
References in Text:
References need not be cited in the text. When they are, they appear on the line, in square brackets, inside the punctuation. Grammatically, they may be
treated as if they were footnote numbers, e.g.,
as shown by Brown [4], [5]; as mentioned earlier [2], [4]–[7], [9]; Smith [4] and Brown and Jones [5]; Wood et al. [7]
or as nouns:
as demonstrated in [3]; according to [4] and [6]–[9].
Alla referenser ska citeras i texten
Referenshantering
25
• Egna dokument
som förstudie, kravspecifikation, etc ska vara bifogade som Appendix och finns ej med i referenslistan utan hänvisas till som om det vore ett kapitel i dokumentet.
Exempel:
Appendix A innehåller en detaljerad teknisk beskrivning.

Att referera
Referera till årtal & författare
The theory was first put forward in 1987 [1]. Scholtz [2] has argued that.......
Hänvisning i referensen till sidor, figurer osv.
[3, pp. 5-10]; [3, Fig. 1]; [3, Appendix I]; [3, Sec. 4.5]
26

Att citera
• Använd i begränsad utsträckning!
• Använd när ni vill hänvisa till en formulering som är anslående eller nyskapande!
• Använd när ni presenterar ett påstående som ni ifrågasätter och vill diskutera!
Detta betyder att ”den vetenskapliga tidskriftsartikeln kännetecknas av primärpublicering av originalarbete och tillgänglighet, av en tillförlitlig och enhetlig presentation samt kritisk granskning utförd av experter inom forskningsområdet” [8, p. 69], men inte att …
I referenslistan!
• Referenserna sorteras i nummerordning
• Tre eller författare använd et al.
E. E. Reber et al.
• Varje källtyp (Bok, artikel, e-material, etc.) skrivs enligt särskilda regler.
• Bok:
[1] B. Klaus and P. Horn, Robot Vision. Cambridge, MA: MIT Press, 1986.
• Kapitel I en bok:
[2] L. Stein, “Random patterns,” in Computers and You, J. S. Brake, Ed. New York: Wiley, 1994, pp. 55-70.
28
I referenslistan!
• Artikel i en tidskrift:
[1] R. E. Kalman, “New results in linear filtering and prediction theory,” J. Basic Eng., ser. D, vol. 83, pp. 95-108, Mar. 1961.
• Konferensbidrag:
[1] H. An, “Research Progress and Practice of Ecology Problems on Information Systems,” in IC4E 2010 : 2010 Int. Conf. on e-Education, e-Business, e-Management and e-Learning, Sanya, China, 2010, pp. 415–419.
DOI nummer
• Digital Object Identifier
• Om det finns anges det i slutet av referensen.
[1] H. An, “Research Progress and Practice of Ecology Problems on Information Systems,” in IC4E 2010 : 2010 Int. Conf. on e-Education, e-Business, e-Management and e-Learning, Sanya, China, 2010, pp. 415–419. DOI:10.1109/IC4E.2010.131
29
I referenslistan!
• E-material:
• Utgå från regler som gäller tryckt material om det är möjligt
• Källor som endast finns elektroniskt har egna regler.
• Datablad
[10] Texas Instruments, “High speed CMOS logic analog multiplexers/demultiplexers,” 74HC4051 datasheet, Nov. 1997 [Revised Sept. 2002]. [Online]. Available: http://nli.vnunet.com/news/1116995. [Accessed Sept. 12, 2007].
30
Mendeley • Gratis version finns
• Desktop & webbaserad – synkronisera & back-up
• Save to Mendeley (webbsidor), Importera referenser
• Webbsidor, Böcker (WorldCat & Libris) & Artiklar (Google Scholar & UniSearch) i ris-format.
• Importerar PDF-filer skapar automatisk referenser
• Infoga referenser i MS Word/Libre Office
• Komma igång
Skapa personligt konto via Mendeley.com
Citera & referera > Mendeley > Guide till Mendeley
31
Söka vetenskapliga publikationer
32
• Det vore trevligt om det finns vetenskapliga tidskriftsartiklar med i referenslistan.
– Granskade
– Välciterade, impact factor
– Ursprungskälla
– Aktuella
• På kurshemsidan finns det länk till bibliotekets hemsida.
• www.bibl.liu.se
• http://guide.bibl.liu.se/TSEA56
Söka vetenskapliga publikationer
Från problemformulering:
• Hur kan man precisionsstyra en robotarm som t ex ska kunna plocka upp föremål?
• Autonomt och fjärrstyrt? Algoritm? Mjuka rörelser för att minska slitage.
Till sökfrågor:
• Robotics control system motion
• Precision motion control robotic arm
• Precision motion control "robotic arm" Autonomous OR remote controlled
33

Var ska jag söka?
• Google?
• UniSearch?
• Databas?
Beror på vad jag letar efter!
Grundläggande eller avancerad information?
34

Sökverktyg: Grundläggande information
• Uppslagsverk NE, AccessScience, Encyclopedia Britannica
• LIBRIS Nationell bibliotekskatalog
• Google books En söktjänst från Google som söker igenom hela eller delar av böcker.
• DiVA Publiceringsdatabas – open access
35

Sökverktyg: Vetenskapliga publikationer
• Google Scholar Filtrerar vetenskapliga publikationer i Google
• UniSearch Bibliotekets söktjänst
• Databaser (Scopus, SpringerLink & SAE MOBILUS m.fl.) Databaser tillgängliga via LiU med vetenskapliga publikationer
36

Google Scholar
• Tillgång utanför LiU:s nätverk (Eduroam)!
– Logga in på bibliotekets startsida
– LiU Full Text
– Installera EZProxy (Chrome & Firefox)
Läs mer på Biblioteket ▶ Söka och använda ▶ Tillgång till e-resurser
Ta fram materialet
PDF-fulltext
LiU Full Text
Tidskrifter
TIPS – Fungerar inte länken via Google Scholar eller UniSearch pröva i databasen
38
Hur kommer jag vidare?
• Relevanta källor ger nya sökord!
– Författare/tidskrift/förlag
– Begrepp/nyckelord/ämnesord
– Referenslista
– Citerad av: (Google Scholar, Scopus & web of Science)
• Dokumentera dina sökningar!
Spara sökningar i aktuell databas
Spara referenser i Mendeley
39
Söka vetenskapliga publikationer

NoPlagiat: självstudieguide om plagiering & upphovsrätt http://noplagiat.bibl.liu.se/
Frågor & funderingar?
• Att referera
• Att citera
• Att parafrasera
• Upphovsrätt
40

www.liu.se
Mattias Krysander







