
Lunar Precursor Robotics Program
Lunar Polar Missions: Science and Instrumentation
Dr. Barbara Cohen
VP40, Lunar Precursor Robotics Program
MSFC


mare/maria
basaltic
highlands
feldspathic
Near side Far side
Aitken crater
South Pole
South Pole - Aitken Basin
Impact basins
Impact craters

Lunar Precursor Robotics Program
The Moon is a terrestrial planet
• The Moon today presents a record of geologic processes of early planetary evolution:– Interior retains a record of the initial stages of planetary evolution
– Crust has never been altered by plate tectonics (Earth) planetwide volcanism (Venus), or wind and water (Mars & Earth)
– Surface exposed to billions of years of volatile input
• The Moon holds a unique place in the evolution of rocky worlds - many fundamental concepts of planetary evolution were developed using the Moon
· The Moon is ancient and preserves an early history· The Moon and Earth are related and formed from a common reservoir· Moon rocks originated through high-temperature processes with no
involvement with water or organics

Lunar Precursor Robotics Program
Lunar framework: Giant impact
• Mars-sized body slammed into the proto-Earth at 4.56 Ga• Moon formed out of
crust/upper mantle
component - lack of
metal• Moon material was
hot - lack of volatile
elements• Moon/Earth have
shared angular
momentum &
oxygen isotopes
Lunar Precursor Robotics Program
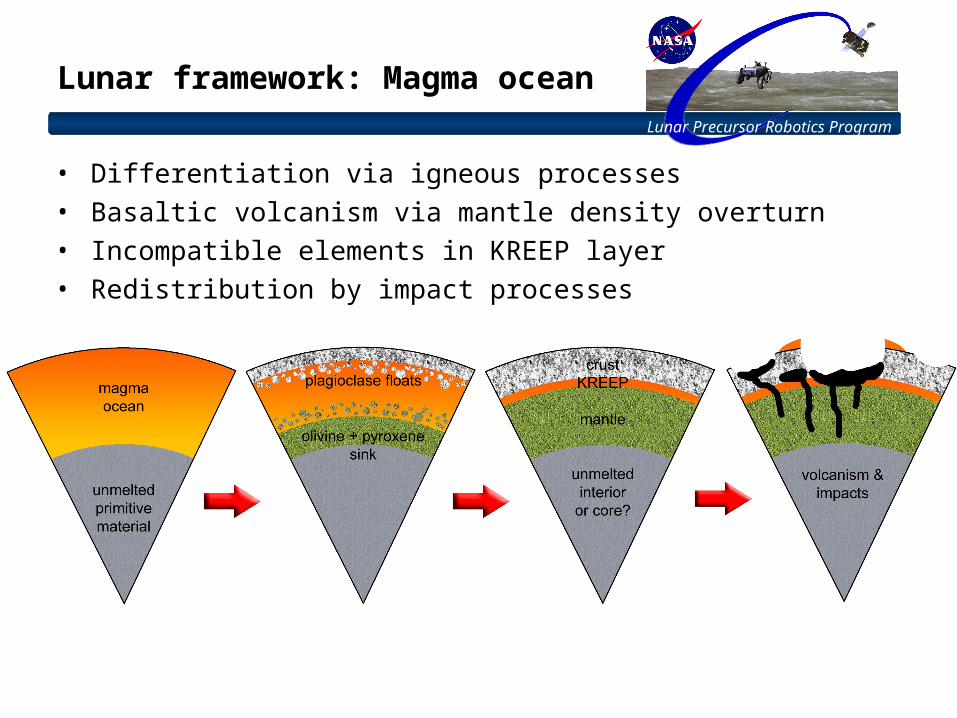
Lunar framework: Magma ocean
• Differentiation via igneous processes• Basaltic volcanism via mantle density overturn• Incompatible elements in KREEP layer• Redistribution by impact processes

Lunar Precursor Robotics Program
Lunar framework: Crater history
• The Moon is the only place where the link is forged between radiometric ages of rocks and relative ages by crater counting
• Crater record of the Moon reflects the flux of impactors in the inner solar system
• Bombardment history of the Moon is magnified on the Earth
Lunar Precursor Robotics Program
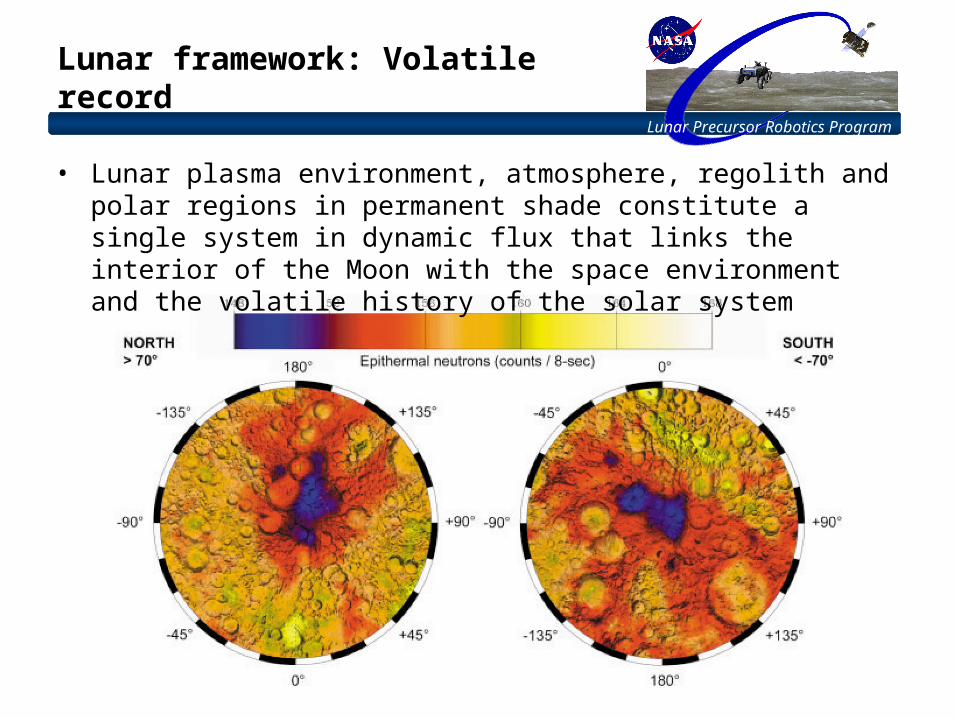
Lunar framework: Volatile record
• Lunar plasma environment, atmosphere, regolith and polar regions in permanent shade constitute a single system in dynamic flux that links the interior of the Moon with the space environment and the volatile history of the solar system

Lunar Precursor Robotics Program
Priorities for lunar science
1) Test the cataclysm hypothesis by determining the spacing in time of the creation of the lunar basins.
2) Anchor the early Earth-Moon impact flux curve by determining the age of the oldest lunar basin (South Pole-Aitken Basin).
3) Establish a precise absolute chronology.
4) Determine the compositional state (elemental, isotopic, mineralogic) and compositional distribution (lateral and depth) of the volatile component in lunar polar regions.
5) Determine the lateral extent and composition of the primary feldspathic crust, KREEP layer, and other products of planetary differentiation.
6) Determine the thickness of the lunar crust (upper and lower) and characterize its lateral variability on regional and global scales.
7) Characterize the chemical/physical stratification in the mantle, particularly the nature of the putative 500-km discontinuity and the composition of the lower mantle.
8) Determine the global density, composition, and time variability of the fragile lunar atmosphere before it is perturbed by further human activity.
9) Determine the size, composition, and state (solid/liquid) of the core of the Moon.
10) Inventory the variety, age, distribution, and origin of lunar rock types.
11) Determine the size, charge, and spatial distribution of electrostatically transported dust grains and assess their likely effects on lunar exploration and lunar-based astronomy.

Lunar Precursor Robotics Program
Robotic lunar exploration objectives
• Global mapping of the lunar surface• Identify optimal landing site(s) on the Moon for robotic and human explorers
• Find and characterize resources that make exploration affordable and sustainable
• Locate and characterize lunar volatiles• Characterize sunlight and surface environment of poles
• Field test new equipment, technologies and approaches (e.g., dust and radiation mitigation)
• Support demonstration, validation, and establishment of heritage of systems for use on human missions
• Determine how life will adapt to space environments• Emplace infrastructure to support human exploration• Gain operational experience in lunar environments• Provide opportunities for industry, educational and international partners

Lunar Precursor Robotics Program
The “dark side” and eternal light

Lunar Precursor Robotics Program
Permanent sunlight and shadow
• Because of solar inclination angle, topography is important at the poles
• Some polar high points are in near-permanent sunlight
• Some polar crater floors are in permanent shadow - cold traps!

Lunar Precursor Robotics Program
Polar volatiles
• Lunar Prospector - orbiter in 1990’s• Carried a Neutron Spectrometer to measure H - but LP NS pixels are
large (> 40 km)• LP data indicate polar H content of ~150-200 ppm
– H could be from solar wind (uniform distribution over light & dark areas)
– H could be as OH- or H2O from comet and asteroid input cold-trapped in permanent shadow (heterogeneous distribution only in dark areas)
• Mission data that can help:• Measure H content of illuminated regolith:
– If H content ~ 150 ppm, then H is of solar wind origin and uniformly distributed
– If H content << 150 ppm, then H is probably segregated and concentrated in cold traps
• Explore shadowed areas to determine the form, distribution, and useability of H and other volatiles such as CO2, organic, etc.

Lunar Precursor Robotics Program
Neutron signature

Lunar Precursor Robotics Program
Radar signature
QuickTime™ and aTIFF (LZW) decompressor
are needed to see this picture.
QuickTime™ and aTIFF (LZW) decompressor
are needed to see this picture.

Lunar Precursor Robotics Program
Notational site - Shackleton
0 5 km
Landing Zone
To Earth
South Pole (Approx.)
Shackleton Rim Candidate site
Permanently dark crater

Lunar Precursor Robotics Program
Possible mission elements
• Surface Morphology / Lighting– Mast-mounted stereo imaging system OR alternative in dark regions such as radar /
lidar / UV / enhanced vis-IR
• Regional subsurface structure– Seismic using an active source (lander) and passive distributed receivers– Several mining techniques could help in this area but as yet are not fully described
• Regolith H (and other volatiles) nature and content– Drill/penetrometers (need to penetrate below ~10 cm desiccated layer; from LP
neutron data)– Mass Specrometer (MS) system to measure volatile species, concentration, and
isotopic ratios– Sample handling system to get sample to instruments OR instrument to sample
• Neutron Signature– Neutron spectrometer (ground truth orbital data)
• Geotechnical Properties– Drill / arm to measure properties in situ with exchangeable end-effectors
• Remote sensing of Elemental and Mineralogy– X-ray techniques (APXS from MER, Raman spectroscopy, X-ray Fluorescence XRF,
etc.)

Lunar Precursor Robotics Program
Payload Element Objective Mass (kg) Mass with 30% Margin (kg)
Power (W)
Power 30% Margin (W)
Stereo imaging system OR Radar OR Lidar
Acquire images of surface for geology, topography and navigation
0.8 1.0 6.0 7.8
Mast for stereo imaging system Provide elevation for imaging 3.5 4.6 9.5 12.4
Drill and drill deployment mechanism
Recover regolith samples from depths of 2 m 20.0 26.0 30.0 39.0
Belly Cam Imaging of drill interface with surface 0.4 0.5 3.8 4.9
Arm Deploy instruments, conduct geotechnical experiments, collect regolith samples
13.0 16.9 43.0 55.9
Scoop Recover surface regolith samples to a depth of TBD cm
0.5 0.7 0.0 0.0
Mass Spectrometer Determine the various volatile compounds present and their isotopic composition
19.0 24.7 75.0 97.5
Sample processing system for MS Process core or scoop material for analysis.
Neutron Spectrometer Determine the flux and energies of neutrons to determine H content of regolith
1.0 1.3 1.8 2.3
Geotechnical Experiments - cone penetrometer (3)
End effector for geotech properties 1.5 2.0 0.0 0.0
Geotech - bearing plate End effector for geotech properties 1.0 1.3 0.0 0.0
Geotech - shear vane End effector for geotech properties 0.5 0.7 0.0 0.0
Magnets Determine magnetism of regolith particles 0.5 0.7 0.0 0.0
XRD / XRF Mineralogy and chemistry of regolith 2 2.6 10 13
Beacon Navigation reference 1.0 1.3 5.0 6.5
Some possible instruments

Lunar Precursor Robotics Program
Current missions: LRO/LCROSS

Lunar Precursor Robotics Program
Proposed penetrometer missions
• JAXA mission Lunar-A (now cancelled)• http://www.isas.jaxa.jp/e/enterp/missions/lunar-a/index.shtml• Two penetrometers, payload mass on each ~10 kg?
– Two-component seismometer– Heat-flow probe– Tiltmeter and accelerometer
• UK Penetrometer studies and proposals• http://www.mssl.ucl.ac.uk/planetary/missions/Micro_Penetrators.php• Penetrometer payload, Total Mass ~2Kg
– Accelerometer & tiltmeter– Seismometers – Thermal – Geochemistry– Options: mineralogy camera, radiation monitor, magnetometer







