
Intersection graphs of boxes and cubes
A Thesis
Submitted For the Degree of
Doctor of Philosophy
in the Faculty of Engineering
by
Mathew C. Francis
Department of Computer Science and Automation
Indian Institute of Science
Bangalore – 560 012
July, 2009

To my parents
and
all my teachers

Acknowledgements
Of all people, I should thank Dr. L. Sunil Chandran first, as the work behind this thesis
is as much his as it is mine. The faith he reposed in me was at times as puzzling to me
as it was reassuring. I am indebted to Dr. Naveen Sivadasan for the long discussions we
had that not only produced results but went a long way in helping me learn the ropes.
The brief but fruitful collaboration with Santhosh Suresh was thoroughly enjoyable.
I am thankful to Dr. Samir Datta for his insights on planar graphs. The stimulating
discussions with Dr. Irith Hartman, Rogers, Manu, Abhijin, Anita, Meghna, Sadagopan,
Chintan and Subramanya have helped shape my view of the subject.
Words cannot express my gratitude towards all my friends at IISc, each one of them
inimitable, each one with a different perspective of the world but at the same time car-
ing, guiding and helping with all their hearts. Rogers, Raj Mohan, Murali Sir, Sheron,
Thomas, Ashik, Dileep, Shijo, Hari, Deepak Ravi, Rashid have all left indelible impres-
sions on me.
I am grateful to Nicky for her care and understanding. It is impossible to thank my
parents enough for their unflinching support and constant encouragement.
i

Abstract
A graph G is said to be an intersection graph of sets from a family of sets F if there exists
a function f : V (G) → F such that for u, v ∈ V (G), (u, v) ∈ E(G) ⇔ f(u) ∩ f(v) 6=∅. Interval graphs are thus the intersection graphs of closed intervals on the real line
and unit interval graphs are the intersection graphs of unit length intervals on the real
line. An interval on the real line can be generalized to a “k-box” in Rk. A k-box
B = (R1, R2, . . . , Rk), where each Ri is a closed interval on the real line, is defined to
be the Cartesian product R1 × R2 × · · · × Rk. If each Ri is a unit length interval, we
call B a k-cube. Thus, 1-boxes are just closed intervals on the real line whereas 2-boxes
are axis-parallel rectangles in the plane. We study the intersection graphs of k-boxes
and k-cubes. The parameter boxicity of a graph G, denoted as box(G), is the minimum
integer k such that G is an intersection graph of k-boxes. Similarly, the cubicity of G,
denoted as cub(G), is the minimum integer k such that G is an intersection graph of
k-cubes. Thus, interval graphs are the graphs with boxicity at most 1 and unit interval
graphs are the graphs with cubicity at most 1. These parameters were introduced by F.
S. Roberts in 1969.
In some sense, the boxicity of a graph is a measure of how different a graph is from an
interval graph and in a similar way, the cubicity is a measure of how different the graph is
from a unit interval graph. We prove several upper bounds on the boxicity and cubicity
of general as well as special classes of graphs in terms of various graph parameters such
as the maximum degree, the number of vertices and the bandwidth.
The following are some of the main results presented.
1. We show that for any graph G with maximum degree ∆, box(G) ≤ 2∆2. This
ii

iii
result implies that bounded degree graphs have bounded boxicity no matter how
large the graph might be.
2. It was shown in [18] that the boxicity of a graph on n vertices with maximum
degree ∆ is O(∆ lnn). But a similar bound does not hold for the average degree
dav of a graph. [18] gives graphs in which the boxicity is exponentially larger than
dav lnn. We show that even though an O(dav lnn) upper bound for boxicity does
not hold for all graphs, for almost all graphs, boxicity is O(dav lnn).
3. The ratio of the cubicity to boxicity of any graph shown in [15] when combined
with the results on boxicity show that cub(G) is O(∆ ln2 n) and O(∆2 lnn) for
any graph G on n vertices and with maximum degree ∆. By using a randomized
construction, we prove the better upper bound cub(G) ≤ ⌈4(∆ + 1) lnn⌉.
4. Two results relating the cubicity of a graph to its bandwidth b are presented. First,
it is shown that cub(G) ≤ 12(∆ + 1)⌈ln(2b)⌉+ 1. Next, we derive the upper bound
cub(G) ≤ b+ 1. This bound is used to derive new upper bounds on the cubicity of
special graph classes like circular arc graphs, cocomparability graphs and AT-free
graphs in relation to the maximum degree.
5. The upper bound for cubicity in terms of the bandwidth gives an upper bound of
∆ + 1 for the cubicity of interval graphs. This bound is improved to show that for
any interval graph G with maximum degree ∆, cub(G) ≤ ⌈log2 ∆⌉ + 4.
6. Scheinerman [54] proved that the boxicity of any outerplanar graph is at most 2.
We present an independent proof for the same theorem.
7. Halin graphs are planar graphs formed by adding a cycle connecting the leaves of
a tree none of whose vertices have degree 2. We prove that the boxicity of any
Halin graph is equal to 2 unless it is a complete graph on 4 vertices, in which case
its boxicity is 1.

Publications based on this thesis
1. “Geometric representation of graphs in low dimension using axis-parallel boxes”,
L. Sunil Chandran, Mathew C. Francis and Naveen Sivadasan, accepted for publi-
cation in Algorithmica, doi:10.1007/s00453-008-9163-5, 2008.
2. “Boxicity and maximum degree”, L. Sunil Chandran, Mathew C. Francis and
Naveen Sivadasan, Journal of Combinatorial Theory, Series B, 98(2):443–445,
March 2008.
3. “Representing graphs as the intersection of axis-parallel cubes”, L. Sunil Chandran,
Mathew C. Francis and Naveen Sivadasan, MCDES 2008, Bangalore, May 2008.
4. “On the cubicity of AT-free graphs and circular-arc graphs”, L. Sunil Chandran,
Mathew C. Francis and Naveen Sivadasan, Graph Theory, Computational Intelli-
gence and Thought, Israel, September 2008.
5. “On the cubicity of interval graphs”, Graphs and Combinatorics, 25(2):169–179,
May 2009.
6. “Boxicity of Halin graphs”, Discrete Mathematics, 309(10):3233–3237, May 2009.
iv

Contents
Acknowledgements i
Abstract ii
Publications based on this thesis iv
1 Introduction 11.1 Basic definitions and notations . . . . . . . . . . . . . . . . . . . . . . . . 11.2 Interval graphs and boxicity . . . . . . . . . . . . . . . . . . . . . . . . . 3
1.2.1 k-boxes: intervals in higher dimensions . . . . . . . . . . . . . . . 51.2.2 Boxicity . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71.2.3 Interval graph representation of a graph . . . . . . . . . . . . . . 8
1.3 Unit interval graphs and cubicity . . . . . . . . . . . . . . . . . . . . . . 101.3.1 Unit and equal interval representations as mappings to real numbers 111.3.2 k-cubes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 121.3.3 Cubicity . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 131.3.4 Indifference graph representation of a graph . . . . . . . . . . . . 13
1.4 A note on the asymptotic notation . . . . . . . . . . . . . . . . . . . . . 141.5 A short survey of previous literature . . . . . . . . . . . . . . . . . . . . 14
1.5.1 Results on boxicity . . . . . . . . . . . . . . . . . . . . . . . . . . 151.5.2 Boxicity in other scientific disciplines . . . . . . . . . . . . . . . . 161.5.3 Results on cubicity . . . . . . . . . . . . . . . . . . . . . . . . . . 171.5.4 Other geometric intersection graph classes . . . . . . . . . . . . . 18
1.6 Outline of the rest of the thesis . . . . . . . . . . . . . . . . . . . . . . . 18
2 Upper bounds for boxicity 212.1 Previous upper bounds on boxicity . . . . . . . . . . . . . . . . . . . . . 21
2.1.1 Boxicity is O(∆ lnn) . . . . . . . . . . . . . . . . . . . . . . . . . 212.1.2 Boxicity and average degree . . . . . . . . . . . . . . . . . . . . . 22
2.2 Boxicity of bounded degree graphs . . . . . . . . . . . . . . . . . . . . . 222.3 Concluding remarks . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
v

CONTENTS vi
3 Boxicity of random graphs 273.1 Random graph preliminaries . . . . . . . . . . . . . . . . . . . . . . . . . 273.2 Boxicity is O(dav lnn) for almost all graphs . . . . . . . . . . . . . . . . . 283.3 Remarks . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
4 A randomized construction for cubicity 334.1 The algorithm RAND . . . . . . . . . . . . . . . . . . . . . . . . . . . . 344.2 Derandomizing RAND . . . . . . . . . . . . . . . . . . . . . . . . . . . 394.3 A useful result . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
5 Cubicity and bandwidth 495.1 Cube representation in O(∆ ln b) dimensions . . . . . . . . . . . . . . . . 505.2 Cube representation in b+ 1 dimensions . . . . . . . . . . . . . . . . . . 555.3 Cubicity of special graph classes . . . . . . . . . . . . . . . . . . . . . . . 59
5.3.1 Circular-arc graphs . . . . . . . . . . . . . . . . . . . . . . . . . . 595.3.2 Cocomparability graphs . . . . . . . . . . . . . . . . . . . . . . . 615.3.3 AT-free graphs . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62
5.4 A summary of results . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63
6 Cubicity of interval graphs 656.1 A few results that we need . . . . . . . . . . . . . . . . . . . . . . . . . . 656.2 The proof . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 676.3 Remarks . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 74
7 Planar graphs 777.1 Preliminaries . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 777.2 Outerplanar graphs . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 797.3 Discussion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 80
8 Boxicity of Halin graphs 818.1 A short introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 818.2 The proof . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 828.3 Results . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 90
9 Conclusion 919.1 Improvements . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 919.2 Open problems . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 929.3 Endnote . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 93
Bibliography 96

List of Figures
1.1 An example of an interval graph . . . . . . . . . . . . . . . . . . . . . . . 31.2 An asteroidal triple . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41.3 A 2-box in R
2 and a 3-box in R3 . . . . . . . . . . . . . . . . . . . . . . . 6
1.4 A 2-box representation for C4 . . . . . . . . . . . . . . . . . . . . . . . . 71.5 K1,n, the star graph with n arms . . . . . . . . . . . . . . . . . . . . . . 10
2.1 Structure of Gi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
5.1 A circular-arc graph . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 595.2 An example of a caterpillar . . . . . . . . . . . . . . . . . . . . . . . . . 62
7.1 A book drawing of K5 using 3 pages . . . . . . . . . . . . . . . . . . . . 78
8.1 A Halin graph . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81
vii
Chapter 1
Introduction
All graphs considered in this work will be simple, undirected and finite. Most of the
graph theoretic notations used shall be defined in the following section. Much of it has
been borrowed from the book “Graph Theory” by Reinhard Diestel [26]. The reader
may please refer to Chapter 1 of [26] for any notations that are not defined here.
1.1 Basic definitions and notations
The notations G(V,E), G = (V,E) or simply G will be used to indicate a graph G which
has a vertex set V (G) and an edge set E(G). An edge between a vertex u and a vertex
v will be denoted by (u, v) (or (v, u)) even though the edge is undirected. Thus, we will
always assume that if (u, v) ∈ E(G), then (v, u) ∈ E(G). If (u, v) ∈ E(G), then u and
v are adjacent in G; otherwise they are nonadjacent. A pair of vertices (u, v) 6∈ E(G) is
said to be a non-edge or a missing edge in G. NG(u) is the neighbourhood of a vertex
u in G, i.e., NG(u) = v | (u, v) ∈ E(G). The degree of a vertex u in G, denoted
by dG(u) is the number of vertices in G that are adjacent to u; or in other words,
dG(u) = |NG(u)|. When there is no ambiguity about the graph under consideration,
NG(u) and dG(u) might be abbreviated to N(u) and d(u) respectively. ∆(G) (or just ∆
if G is understood) will stand for the maximum degree of a vertex in G. The complement
of a graph G, denoted by G is the graph with vertex set V (G) = V (G) and edge set
1

Chapter 1. Introduction 2
E(G) = (u, v) | u, v ∈ V (G) and (u, v) 6∈ E(G). A graph H with V (H) ⊆ V (G) and
E(H) ⊆ E(G) is said to be a subgraph of G. A graph H is said to be an induced subgraph
of G if V (H) ⊆ V (G) and E(H) = (u, v) ∈ E(G) | u, v ∈ V (H). One might also say
that “H is the subgraph induced by V (H) in G” to indicate the same fact.
A graph G′ is a supergraph of G if V (G) = V (G′) and E(G) ⊆ E(G′).
Definition 1.1. If G1 and G2 are two graphs on the same vertex set V , we denote by
G = G1 ∩G2 the graph with vertex set V (G) = V and edge set E(G) = E(G1)∩E(G2).
G contains only those edges that are present in both G1 and G2. In other words, G1
and G2 are both supergraphs of G and every non-edge in G is a non-edge in either G1
or G2 or both.
A path on n vertices, denoted by Pn, is the graph with vertex set V (Pn) = v1, v2, . . . ,
vn and edge set E(Pn) = (vi, vi+1) | 1 ≤ i ≤ n − 1. A cycle on n vertices, denoted
by Cn, is the graph with vertex set V (Cn) = v1, v2, . . . , vn and edge set E(Cn) =
(vi, vi+1) | 1 ≤ i ≤ n− 1 ∪ (vn, v1).
Given a graph G(V,E), a set of vertices S ⊆ V (G) is said to be an independent set
if no two vertices in S are adjacent in G. On the other hand, a set of vertices S ⊆ V (G)
is said to be a clique if every pair of vertices in S is adjacent in G.
A graph G(V,E) is a complete p-partite graph if V (G) = A1 ∪ A2 ∪ · · · ∪ Ap such
that Ai is an independent set for each i and E(G) = (u, v) | u ∈ Ai, v ∈ Aj and i 6= j.
If we let ni = |Ai|, then we denote such a graph by Kn1,n2,...,np. We call each set Ai a
“part”.
Definition 1.2. A permutation π on a finite set S is a bijection π : S → 1, 2, . . . , |S|.
Another way to think of π is as an ordering of the elements of the set S.
A closed interval on the real line, denoted as [i, j] where i, j ∈ R and i ≤ j, is the
set x ∈ R | i ≤ x ≤ j. Given an interval X = [i, j], define l(X) = i and r(X) = j.
We say that the interval X has left end-point l(X) and right end-point r(X). Since we
deal with only closed intervals throughout, we shall often shorten “closed interval” to

Chapter 1. Introduction 3
just “interval”.
Definition 1.3. Let S be a collection of sets. A graph G(V,E) is said to be an
intersection graph of sets from S, if there is a function f : V (G) → S such that for
any two vertices u, v ∈ V (G), (u, v) ∈ E(G) ⇔ f(u) ∩ f(v) 6= ∅.
In other words, it is possible to assign sets from S to each vertex in G such that if
two vertices are adjacent, then the sets assigned to them have a non-empty intersection
and if they are nonadjacent, the sets assigned to them are disjoint.
Depending on what the collection S is, one can define a variety of intersection graph
classes. For example, if X is the collection of all closed intervals on the real line, the
class of intersection graphs of sets from X is exactly the class of interval graphs.
1.2 Interval graphs and boxicity
Definition 1.4. A graph G is an interval graph if ∃f : V (G) → X | ∀u, v ∈V (G), (u, v) ∈ E(G) ⇔ f(u) ∩ f(v) 6= ∅, where X is the set of all closed intervals
on the real line. The mapping f is called an interval representation of the graph G.
The examples below illustrate this concept.
[2, 3]
[1, 2][1, 2]
[0, 1]
Figure 1.1: An example of an interval graph
An example of a graph which is not an interval graph is a chordless cycle on n vertices
where n ≥ 4, denoted as Cn. The reason is easily explained as follows. Assume for the

Chapter 1. Introduction 4
sake of contradiction that Cn is indeed an interval graph. Then, there should exist an
interval representation, say f , for Cn. Let x be the vertex in Cn whose interval has
the leftmost left end-point. Let the cycle be xv1v2 . . . vn−1x. Since (x, v2) is not an
edge, the intervals f(x) and f(v2) are disjoint and since f(x) is the interval with the
leftmost left end-point, we have r(f(x)) < l(f(v2)). For the same reason, we also have
r(f(x)) < l(f(vn−2)) (note that v2 and vn−2 could be the same vertex if n = 4). It is
easy to see that the interval of any vertex that is adjacent to both x and v2 or to both
x and vn−2 will contain the point r(f(x)). Thus both the intervals f(v1) and f(vn−1)
contain the point r(f(x)) implying that f(v1) ∩ f(vn−1) 6= ∅. But (v1, vn−1) is not an
edge in Cn thus contradicting our assumption that Cn is an interval graph.
A cycle C in a graph G is an induced cycle if the subgraph induced by the vertices
of C in G is C. In other words, the induced cycles in a graph are exactly the chordless
cycles in that graph. Since any induced subgraph of an interval graph is also an interval
graph, interval graphs cannot contain induced cycles of length more than 3.
Definition 1.5. A graph G is a chordal graph if there are no induced cycles of length
more than 3 in it.
Interval graphs are thus a subclass of chordal graphs. But not all chordal graphs are
interval graphs. Shown in Figure 1.2 is a graph that has no cycles (and hence is chordal)
but is still not an interval graph.
v1
v2
v3
v4v6
v5
v0
Figure 1.2: v2, v4 and v6 form an asteroidal triple
An asteroidal triple (or AT in short) in a graph is an independent set of three vertices

Chapter 1. Introduction 5
such that between any two of these vertices, there is a path in the graph that does not
pass through any neighbour of the third vertex. It can be shown that an interval graph
cannot contain an AT. Suppose G is an interval graph and the vertices x, y and z form an
asteroidal triple in G. Let f be an interval representation of G. The intervals f(x), f(y)
and f(z) are pairwise disjoint since x, y, z is an independent set. Assume without loss
of generality that the interval f(y) is in between f(x) and f(z). Now, it is not difficult
to convince oneself that any path in G between x and z will contain at least one vertex
v such that f(v) overlaps f(y). This contradicts the fact that x, y, z is an asteroidal
triple in G.
The graph in Figure 1.2 is not an interval graph because the vertices v2, v4 and v6
form an asteroidal triple.
Definition 1.6. A graph G is an AT-free graph if it contains no asteroidal triples.
It turns out that the two concepts of large induced cycles and asteroidal triples are
enough to characterize interval graphs. If a graph does not have induced cycles of length
more than 3 or asteroidal triples in it, then it is an interval graph.
Theorem 1.7 (Lekkerkerker and Boland [43]). A graph is an interval graph if
and only if it is chordal and AT-free.
The reader should note that Definition 1.4 can be changed to use open intervals
instead of closed intervals. It is an easy exercise to prove that the class of intersection
graphs of open intervals on the real line is the same as that of closed intervals and
therefore, a separate treatment of the two is unnecessary.
1.2.1 k-boxes: intervals in higher dimensions
An interval is the collection of all points on the real line between an upper and a lower
bound. How can we generalize this notion to higher dimensional spaces, say to R2, from
the real line? We could look at an ordered pair of intervals of the form (Ix, Iy). Note that
an ordered pair of intervals (Ix, Iy) describes a rectangle in R2 (with its sides parallel
to the axes) as shown in Figure 1.3. In other words, (Ix, Iy) denotes the set Ix × Iy of

Chapter 1. Introduction 6
points in R2. It is easy to see that given two rectangles A = (A1, A2) and B = (B1, B2),
X
Iy
Y
Iz
XIx
Iy
Y
B = (Ix, Iy) B = (Ix, Iy, Iz)
Ix
Z
Figure 1.3: A 2-box in R2 and a 3-box in R
3
A ∩ B 6= ∅ (i.e., the two rectangles have at least one point in common) if and only if if
there is an overlap between intervals A1 and B1 (on the X-axis) and between intervals
A2 and B2 (on the Y -axis). We call these rectangles 2-boxes, in the sense that they are
boxes in the 2-dimensional plane R2.
We can generalize this definition to k dimensions by defining the notion of a k-box.
Definition 1.8. A k-box, denoted as a k-tuple of intervals (R1, R2, . . . , Rk) is the set
of points R1 ×R2 × · · · ×Rk.
A k-box could be thought of as a “k-dimensional box” or a “box” in Rk with its sides
parallel to the axes. We sometimes refer to such boxes as “axis-parallel k-dimensional
boxes”. Given two k-boxes A = (A1, . . . , Ak) and B = (B1, . . . , Bk), A ∩ B 6= ∅ ⇔∀i | 1 ≤ i ≤ k, Ai ∩Bi 6= ∅.
Since a k-box denoted by a k-tuple of intervals, X k denotes the set of all k-boxes.
A graph G is said to be an intersection graph of k-boxes if there exists a mapping
f : V (G) → X k such that (u, v) ∈ E(G) ⇔ f(u) ∩ f(v) 6= ∅. Such a mapping f is called
a k-box representation of G. Let us denote by Hk, the class of intersection graphs of k-
boxes, or in other words, the class of graphs that have k-box representations. If a graph
G ∈ Hk, we say that G is “representable” or “can be represented” as the intersection of

Chapter 1. Introduction 7
k-boxes. By our definition of a k-box, a 1-box is just an interval on the real line. Thus,
H1 is exactly the class of interval graphs. Further, it can be easily seen that for j > i,
Hi ⊆ Hj. This is because if a graph G has an i-box representation f , then it also has
a j-box representation g which can be defined as follows: for every vertex u ∈ V (G),
g(u) is obtained by appending an arbitrary interval I, (j − i) times to the i-tuple f(u).
Thus, if f(u) = (f1(u), . . . , fi(u)), then g(u) = (f1(u), . . . , fi(u), I1, I2, . . . , Ij−i) where
I1 = I2 = · · · = Ij−i = I and I is an arbitrary interval.
But does using higher dimensional boxes give us more power? Do more graphs become
representable as the intersection of k-boxes as we increase k? Let us consider the class
of intersection graphs of 2-boxes. The graph C4, that was observed to be not an interval
graph can be seen to be an intersection graph of 2-boxes (see Figure 1.4). This example
v1
v3
v4v2
v1
v2
v3
v4
Figure 1.4: A 2-box representation for C4
shows that H1 ⊂ H2.
1.2.2 Boxicity
We are now ready to define the parameter boxicity of a graph.
Definition 1.9. The boxicity of a graph G, denoted as box(G), is the minimum
positive integer k such that G is representable as the intersection of k-boxes.
Thus, G is an interval graph if and only if box(G) = 1. Also, since C4 is not an
interval graph but has a 2-box representation as we have seen above, box(C4) = 2.

Chapter 1. Introduction 8
The natural question to ask now is how high can the boxicity of a graph be? Will it
even be finite? It can be easily shown that if G is any graph on n vertices, box(G) ≤ n.
In fact, a slightly more careful analysis shows that box(G) ≤ ⌊n/2⌋ for any graph G on
n vertices. Roberts [51] has shown that a complete n/2-partite graph with 2 vertices in
each part has boxicity equal to n/2. This graph, which we call the Roberts’ graph on n
vertices is just a complete graph on n vertices with a maximum matching removed from
it. This also shows that for any k ∈ N, and k ≥ 1, there exists a graph with boxicity
equal to k, namely the Roberts’ graph on 2k vertices. It can thus be concluded that for
any k, Hk ⊂ Hk+1 since the Roberts’ graph on 2(k + 1) vertices is in Hk+1 but not in
Hk.
1.2.3 Interval graph representation of a graph
Below, we state a very useful lemma due to Roberts [51].
Lemma 1.10 (Roberts [51]). For any graph G, box(G) ≤ k if and only if there exists
k interval graphs I1, . . . , Ik such that G = I1 ∩ · · · ∩ Ik.Proof:
(⇒): If box(G) ≤ k then there exists a function f : V (G) → X k such that for
any u, v ∈ V (G), (u, v) ∈ E(G) ⇔ f(u) ∩ f(v) 6= ∅. Define functions f1, . . . , fk on
V (G) as follows: for u ∈ V (G), f(u) = (f1(u), . . . , fk(u)). For 1 ≤ i ≤ k, let Ii be an
interval graph with vertex V (G) and interval representation fi. Now, (u, v) ∈ E(G) ⇔f(u) ∩ f(v) 6= ∅ ⇔ ∀i, fi(u) ∩ fi(v) 6= ∅ ⇔ ∀i, (u, v) ∈ E(Ii). It now follows that
G = I1 ∩ · · · ∩ Ik.
(⇐): Let G = I1 ∩ · · · ∩ Ik. For 1 ≤ i ≤ k, let fi : V (G) → X be an interval
representation for Ii (recall that V (Ii) = V (G)). Define f : V (G) → X k as follows:
for u ∈ V (G), f(u) = (f1(u), . . . , fk(u)). We claim that f is a k-box representation for
G. Since G = I1 ∩ · · · ∩ Ik, (u, v) ∈ E(G) ⇔ ∀i, (u, v) ∈ E(Ii) ⇔ ∀i, fi(u) ∩ fi(v) 6=∅ ⇔ f(u) ∩ f(v) 6= ∅. f is therefore a k-box representation for G thus proving that
box(G) ≤ k.

Chapter 1. Introduction 9
Note that the interval graphs I1, . . . , Ik are supergraphs of G. Thus, the forward
implication of the lemma means that if box(G) ≤ k, then it is possible to find k interval
supergraphs of G such that every edge that is not present in G is not present in at least
one of these interval supergraphs. Conversely, if one can find k interval graphs I1, . . . , Ik
such that G = I1 ∩ · · · ∩ Ik, then box(G) ≤ k. Given below is a straightforward corollary
of Lemma 1.10.
Corollary 1.11. If G = G1 ∩G2 ∩ · · · ∩Gk, then box(G) ≤ ∑ki=1 box(Gi).
Definition 1.12. A collection of interval graphs such that their intersection gives the
graph G is said to be an interval graph representation of G.
Almost always, we prove that the boxicity of a given graph G is not more than k
by constructing an interval graph representation of G with k interval graphs. As an
example, we prove a claim that we made earlier.
Theorem 1.13 (Roberts [51]). If G is any graph on n vertices, box(G) ≤ n.
Proof: For u ∈ V (G), let Iu be an interval graph with vertex set V (G) and interval
representation fu given by:
fu(u) = [0, 1],
∀v ∈ N(u), fu(v) = [1, 2], and
∀v 6∈ N(u), fu(v) = [2, 3].
It can be easily verified that Iu | u ∈ V (G) is an interval graph representation of
G with n interval graphs. It now follows from Lemma 1.10 that box(G) ≤ n.
It should be noted that if H is an induced subgraph of G, then box(H) ≤ box(G).
This is because if fG is a k-box representation for G, then one can obtain a k-box
representation fH for H by letting fH = fG|V (H), the restriction of fG to V (H). This
observation also means that the boxicity of any graph is greater than or equal to the
boxicity of any of its induced subgraphs.
When we deal with box representations of graphs, we are free to use boxes of arbitrary
dimensions, that is to say that the boxes assigned to two different vertices need not be

Chapter 1. Introduction 10
of the same size or shape as long as they are both axis-parallel. It seems worthwhile to
think about more restricted box representations. For example, what if want all the boxes
used in a box representation to have the same size (i.e., the same dimensions)? Can such
a representation in box(G) dimensions be obtained for every graph G? Let us look at
the simplest case first—when box(G) = 1. The question posed above is equivalent to
asking whether for an interval graph G, there exists an interval representation such that
the intervals assigned to each vertex are of the same length (we define the “length” of an
interval [x1, x2] to be x2 − x1). The answer is no, as illustrated by the graph K1,n, also
known as the star graph (shown in Figure 1.5). K1,n is an interval graph as it has an
interval representation as shown in the figure. But some observation can convince the
reader that if n ≥ 3, K1,n cannot have an interval representation in which all the vertices
are assigned intervals of the same length. Some interval graphs (like the one shown in
v1 v2 v3 vn−1 vnvn−2
c
. . .v1
v2
v3
vn
vn−1
vn−2
c
Figure 1.5: K1,n, the star graph with n arms and an interval representation for it
Figure 1.1) do have interval representations that assign intervals of the same length to
each vertex. As we see in the next section, the class of such interval graphs are called
unit interval graphs, proper interval graphs or indifference graphs.
1.3 Unit interval graphs and cubicity
Now, if we let X1 ⊂ X to be the set of all unit length intervals on the real line, the class
of intersection graphs on X1 is the class of unit interval graphs or indifference graphs.

Chapter 1. Introduction 11
Definition 1.14. A graph G is a unit interval graph if ∃f : V (G) → X1 | ∀u, v ∈V (G), (u, v) ∈ E(G) ⇔ f(u) ∩ f(v) 6= ∅, where X1 is the set of all closed intervals of
length 1 on the real line. The mapping f is called a unit interval representation of
the graph G.
For x ∈ R+, let Xx denote the set of all closed intervals of length x on the real line. If
a graph G has a unit interval representation f , then for any x ∈ R+ it also has an interval
representation g : V (G) → Xx defined as: ∀u ∈ V (G), g(u) = [x · l(f(u)), x · r(f(u))].
Clearly, g is an interval representation for G that maps the vertices in G to intervals of
length x. g is thus an equal interval representation as defined below.
Definition 1.15. An interval representation f of a graph G is called an equal interval
representation with interval length x if for each v ∈ V (G), r(f(v)) − l(f(v)) = x.
Conversely, if a graph G has an equal interval representation g with interval length x
(where x ∈ R+), then it has a unit interval representation f given by: ∀u ∈ V (G), f(u) =
[
1x· l(g(u)), 1
x· r(g(u))
]
. It can thus be seen that unit interval graphs are exactly those
graphs with equal interval representations.
Note that the class of unit interval graphs is also exactly the class of interval graphs
which have an interval representation such that the interval assigned to no vertex is
properly contained in the interval assigned to another vertex as shown in [32]. Therefore,
these graphs are also called proper interval graphs.
1.3.1 Unit and equal interval representations as mappings to
real numbers
Since a unit length interval is completely specfied by just one of its end-points, a unit
interval representation could assign just real numbers (instead of unit length intervals)
to vertices in such a way that two vertices are adjacent if and only if the real numbers
assigned to them differ by at most 1. Note that we could think of these real numbers
as the left end-points of the unit intervals assigned to the vertices. The same is true
for equal interval representations of interval length x. In this case, two vertices are

Chapter 1. Introduction 12
adjacent if and only if the real numbers assigned to them differ by at most x. This
idea can be expressed mathematically as follows. If f is an equal interval representation
with interval length x for the unit interval graph G, then define g : V (G) → R as: for
u ∈ V (G), g(u) = l(f(u)). Now, (u, v) ∈ E(G) ⇔ f(u) ∩ f(v) 6= ∅ ⇔ |g(u) − g(v)| ≤ x.
Conversely, if g is a function that maps the vertices of G to real numbers such that
(u, v) ∈ E(G) ⇔ |g(u) − g(v)| ≤ x for some x ∈ R+, then we can define a function
f : V (G) → Xx as: for u ∈ V (G), f(u) = [g(u), g(u) + x]. We therefore have (u, v) ∈E(G) ⇔ |g(u) − g(v)| ≤ x ⇔ f(u) ∩ f(v) 6= ∅. We implicitly assume the existence of
f when we speak of g and therefore we do not make any distinction between f and g.
Thus, we say that g is an equal interval representation with interval length x for G and
if x = 1, we say that g is a unit interval representation for G. We thus have the following
alternate definition for unit and equal interval representations.
Definition 1.16. Given a graph G, a function f : V (G) → R such that (u, v) ∈ E(G) ⇔|f(u)− f(v)| ≤ x is called an equal interval representation with interval length x of
the graph G. If x = 1, then we call f a unit interval representation of G.
1.3.2 k-cubes
Recall that we generalized intervals on the real line to k-boxes in Rk. Along the same
lines, we define a k-cube as follows.
Definition 1.17. A k-cube, denoted as (R1, R2, . . . , Rk), where each Ri is a unit
length interval on the real line, is the set of points R1 ×R2 × · · · ×Rk.
k-cubes are also referred to as “axis-parallel k-dimensional cubes”. Since a k-cube
is denoted by a k-tuple of unit length intervals, it can be thought to be a member
of the set (X1)k. As we saw in the last paragraph, each Ri, being a unit interval, is
completely defined by just specifying its left end-point l(Ri), since r(Ri) = l(Ri) + 1.
Thus the k-cube (R1, R2, . . . , Rk) can be alternately denoted by a k-tuple of real numbers
(l(R1), l(R2), . . . , l(Rk)). This notation allows us to think of k-cubes as members of Rk

Chapter 1. Introduction 13
and often makes their handling easier. If A,B ∈ Rk are two k-cubes such that A =
(a1, . . . , ak) and B = (b1, . . . , bk), then A ∩B 6= ∅ if and only if for each i, |ai − bi| ≤ 1.
A graph G is said to be an intersection graph of k-cubes if ∃f : V (G) → Rk, such
that (u, v) ∈ E(G) ⇔ f(u) ∩ f(v) 6= ∅ or in other words, there exists a mapping f that
maps the vertices of G to k-cubes such that two vertices u and v in G are adjacent if
and only if the k-cubes corresponding to them have a non-empty intersection. Such a
mapping f is called a k-cube representation of G.
1.3.3 Cubicity
Definition 1.18. The cubicity of a graph G, denoted by cub(G), is defined to be the
minimum integer k such that G has a k-cube representation.
The graphs with cubicity 1 are therefore exactly the class of unit interval graphs.
The cubicity of any graph on n vertices is at most 2n/3 as shown by Roberts in [51]. He
also shows that the Roberts’ graph on n vertices has cubicity equal to 2n/3.
Note that since a k-cube is also a k-box, any graph that is an intersection graph of
k-cubes is also an intersection graph of k-boxes. From this observation, it follows that
for any graph G, box(G) ≤ cub(G).
1.3.4 Indifference graph representation of a graph
Recall that unit interval graphs are also called indifference graphs. Similar to Lemma
1.10 for boxicity, we have the following lemma for cubicity.
Lemma 1.19 (Roberts [51]). For any graph G, cub(G) ≤ k if and only if there exists
k indifference graphs (unit interval graphs) I1, . . . , Ik such that G = I1 ∩ · · · ∩ Ik.A collection of indifference graphs whose intersection gives the graph G is called an
indifference graph representation or a unit interval graph representation of G. Thus
in order to prove that a graph G has cubicity at most k, we just need to produce an
indifference graph representation of G using k indifference graphs. Akin to that for
boxicity, we have the following corollary to Lemma 1.19.

Chapter 1. Introduction 14
Corollary 1.20. If G = G1 ∩G2 ∩ · · · ∩Gk, then cub(G) ≤ ∑ki=1 cub(Gi).
1.4 A note on the asymptotic notation
We use the asymptotic notation to express various bounds on the boxicity and cubicity
of graphs. A short description of the way in which we use the asymptotic notation is
given below.
Let ℘(G) be a graph parameter such as box(G) or cub(G) and let f(G) be a function
that is defined in terms of various parameters of G. We denote by “℘(G) = O(f)” or
“℘(G) ∈ O(f)” or “℘ is O(f)” the fact that there exists constants c0 and c such that
for any graph G, ℘(G) ≤ c0 + cf(G). For example, in Chapter 4, we prove that for
any graph G on n vertices and having maximum degree ∆, cub(G) ≤ ⌈4(∆ + 1) lnn⌉.Because of this result, we say that cub(G) is O(∆ lnn).
Similarly, by “℘(G) = Ω(f)” or “℘(G) ∈ Ω(f)” or “℘ is Ω(f)” we mean that there
exist constants c0 and c such that f(G) ≤ c0 + c℘(G). “℘(G) = Θ(f)” denotes the fact
that ℘(G) = O(f) and ℘(G) = Ω(f).
1.5 A short survey of previous literature
The parameters boxicity and cubicity of graphs were introduced by F. S. Roberts [51] in
1969. Roberts showed that for any graph G on n vertices box(G) ≤ n/2 and cub(G) ≤2n/3. Both these bounds are tight since box(K2,2,...,2) = n/2 and cub(K3,3,...,3) = 2n/3
where K2,2,...,2 denotes the complete n/2-partite graph with 2 vertices in each part and
K3,3,...,3 denotes the complete n/3-partite graph with 3 vertices in each part.
It is easy to see that the boxicity of any graph is at least the boxicity of any induced
subgraph of it.

Chapter 1. Introduction 15
1.5.1 Results on boxicity
It was shown by Cozzens [23] that computing the boxicity of a graph is NP-hard. This
was later improved by Yannakakis [62], and finally by Kratochvıl [40] who showed that
deciding whether the boxicity of a graph is at most 2 itself is NP-complete.
In many algorithmic problems related to graphs, the availability of certain convenient
representations turns out to be extremely useful. Probably, the most well-known and
important examples are the tree decompositions and path decompositions [7]. Many
NP-hard problems are known to be polynomial time solvable given a tree(path) decom-
position of bounded width for the input graph. Similarly, the representation of graphs
as intersections of “disks” or “spheres” lies at the core of solving problems related to
frequency assignments in radio networks, computing molecular conformations etc. For
the maximum independent set problem which is hard to approximate within a factor
of n(1/2)−ǫ for general graphs [35], a PTAS is known for disk graphs given the disk rep-
resentation [27, 13]. In a similar way, the availability of a box representation in low
dimension makes some well known NP hard problems polynomial time solvable. For
example, it was shown in [53] that the max-clique problem is polynomial time solvable
in graph classes with a polynomial bound on the number of maximal cliques. Since
boxicity k graphs have only O((2n)k) maximal cliques, the max-clique problem admits
a polynomial-time algorithm in bounded boxicity graphs. It was shown in [35] that the
complexity of finding the maximum independent set is hard to approximate within a
factor n(1/2)−ǫ for general graphs. In fact, [35] gives the stronger inapproximability result
of n1−ǫ, for any ǫ > 0, under the assumption that NP6=ZPP. Though this problem is
NP-hard even for boxicity 2 graphs, it is approximable to a factor of ⌊1 + 1c
log n⌋d−1 for
any constant c ≥ 1 for boxicity d (d ≥ 2) graphs given a box representation [2, 5]. It was
shown in [16] that for any graph G, box(G) ≤ tw(G) + 2, where tw(G) is the treewidth
of G. This result implies that the class of ‘low boxicity’ graphs properly contains the
class of ‘low treewidth graphs’.
Researchers have also tried to bound the boxicity of graph classes with special struc-
ture. Scheinerman [54] showed that the boxicity of outer planar graphs is at most 2.

Chapter 1. Introduction 16
Thomassen [57] proved that the boxicity of planar graphs is bounded above by 3. Upper
bounds for the boxicity of many other graph classes such as chordal graphs, AT-free
graphs, permutation graphs etc. were shown in [16] by relating the boxicity of a graph
with its treewidth. Researchers have also tried to generalize or extend the concept of box-
icity in various ways. The poset boxicity [59], the rectangle number [20], grid dimension
[4], circular dimension [30, 55] and the boxicity of digraphs [19] are some examples.
1.5.2 Boxicity in other scientific disciplines
Box representations of graphs find application in problems from ecology and operations
research. As an example, we give an outline of a problem from ecology below:
Niche problem in ecology:
Ecologists study the interactions between various organisms in an environment. Each
species has a natural habitat in which it is commonly found. If we examine different
environmental factors like temperature, humidity, pH etc. of the natural habitats of a
species, we can find for each factor a range of values which characterizes the habitats
in which the species is found. If we have k such factors, we can define a k-dimensional
space with an axis for each such factor. Such a space is called the “ecological phase
space”. The range of values of each factor for a species together defines a k-box, or
the “ecological niche” of the species. If the ecological niches of two species overlap,
then they can be together found in some habitats. Ecologists traditionally use directed
graphs called “food webs” which define the “predator-prey” relationship between a set
of species. There is an edge from a species X to a species Y in this graph if Y preys on
X. Now, two species compete for food if they have a common prey. An undirected graph
drawn with the vertex set as a set of species and with edges in such a way that there is
an edge between two species if they have a common prey is called a “competition graph”.
An edge in this graph between two species X and Y means that X and Y compete for
food. At the same time, considering an ecological phase space in which one dimension
is the “feeding dimension” (an axis with the kinds of food that various species eat along

Chapter 1. Introduction 17
it), two species compete if and only if their ecological niches in this phase space overlap.
Now, if we have a competition graph of a set of species from various sources of data like
food webs, then the question of what the boxicity of the graph is becomes interesting.
This problem was studied extensively by Cohen [21]. He observed that in most cases,
the competition graphs turn out to be interval graphs which means that one dimension
suffices to explain the competition graph. Considering that a large majority of possible
graphs are not interval graphs, this seems too much of a coincidence. Roberts gives a
nice overview of this problem in [52].
1.5.3 Results on cubicity
It has been shown that deciding whether the cubicity of a given graph is at least 3 is
NP-hard [62].
It is easy to see that the problem of representing graphs using k-cubes can be equiv-
alently formulated as the following geometric embedding problem. Given an undirected
unweighted graph G = (V,E) and a threshold t, find an embedding f : V → Rk of the
vertices of G into a k-dimensional space (for the minimum possible k) such that for any
two vertices u and v of G, ||f(u) − f(v)||∞ ≤ t if and only if u and v are adjacent. The
norm || ||∞ is the L∞ norm. Clearly, a k-cube representation of G yields the required
embedding of G in the k-dimensional space. The minimum dimension required to embed
G as above under the L2 norm is called the sphericity of G. Refer to [47] for applications
where such an embedding under L∞ norm is argued to be more appropriate than em-
bedding under L2 norm. The connection between cubicity and sphericity of graphs were
studied in [31, 45]. The cube representation of special classes of graphs like hypercubes
and complete multipartite graphs were investigated in [51, 45, 48]. Also, the cubicity of
the d-dimensional hypercube was shown to be Θ( dlog d
) in [17]. A lower bound for the
cubicity of general graphs in terms of the diameter and maximum independent set size
was shown in [14].
The ratio of cubicity to boxicity of any graph on n vertices was shown to be at most
⌈log2 n⌉ in [15].

Chapter 1. Introduction 18
1.5.4 Other geometric intersection graph classes
Like interval and unit interval graphs, a number of classes of geometric intersection
graphs have been studied. Circular arc graphs [32] are the intersection graphs of arcs
on a circle and circle graphs are the intersection graphs of chords of a circle. Tolerance
graphs [33] generalize interval graphs to allow a restricted overlap between two intervals.
An intersection model for permutation graphs is given [32]. Trapezoid graphs are the
intersection graphs of trapezoids between two parallel lines [25]. Graphs defined as the
intersection of a number of different kinds of geometric objects in the plane are described
in [40].
Interval catch digraphs [49] have an intersection model very similar to that of interval
graphs but are directed graphs. In this model, a pair (Ix, px), where Ix is an interval and
px is a point in Ix, is assigned to each vertex such that there is a directed edge (x, y) in
the graph if and only if py ∈ Ix.
Another generalization of interval graphs is to make the set assigned to each vertex
the union of k intervals such that two vertices are adjacent if and only if the sets assigned
to them have a non-empty intersection. The minimum k required to represent a graph
in such a way is called its interval number [58].
A survey of a number of intersection graph classes and their applications is available
in [46].
1.6 Outline of the rest of the thesis
Chapter 2 investigates the relationship between the maximum degree and the boxicity
of a graph. The previous upper bound for boxicity in terms of the maximum degree ∆
of a graph was ⌈(∆ + 2) lnn⌉ 1. A new upper bound of 2∆2 for boxicity is presented,
thereby showing that the boxicity of a bounded degree graph is bounded no matter how
large the graph is.
1Note that almost invariably, we use n to denote the number of vertices of the graph under
consideration.

Chapter 1. Introduction 19
Chapter 3 shows that even though there are graphs whose boxicity is not O(dav lnn)
where dav is the average degree, such graphs are rare. The theory of random graphs is
used to show that in a suitable random graph model, the probability of the randomly
drawn graph to have a boxicity that is O(dav lnn) goes to 1 as n becomes large. We
make use of the upper bound on boxicity proved in Chapter 2 to prove this result.
In Chapter 4, we see that if we randomly generate ⌈4(∆ + 1) lnn⌉ indifference su-
pergraphs of an input graph G, then there is a slight possibility that these indifference
graphs form an indifference graph representation of G. Thus we have an upper bound of
⌈4(∆ + 1) lnn⌉ on the cubicity of a graph. The randomized algorithm is derandomized
to obtain a deterministic polynomial-time algorithm that outputs a cube representation
of the input graph in ⌈4(∆ + 1) lnn⌉ dimensions.
Two results relating the cubicity and the bandwidth of a graph are presented in
Chapter 5. A bandwidth ordering of the graph is taken as input and the construction
introduced in Chapter 4 is applied to show an O(∆ ln b) upper bound for the cubicity of
any graph with maximum degree ∆ and bandwidth b. Another upper bound of b+ 1 on
the cubicity is also shown. This bound is used to show upper bounds on the cubicity of
circular-arc graphs, cocomparability graphs and AT-free graphs.
Each of Chapters 6–8 deals with a special graph class.
The upper bound of b+1 for cubicity automatically gives us an upper bound of ∆+1
for the cubicity of any interval graph. In Chapter 6, we show that a much tighter upper
bound of ⌈log2 ∆⌉ + 4 exists for the cubicity of interval graphs.
Outerplanar graphs are studied next. As mentioned before, it was proved by Schein-
erman [54] that outerplanar graphs need boxicity at most 2. Chapter 7 gives an inde-
pendent proof that shows the same result.
In Chapter 8, we look at Halin graphs, which are a restricted class of planar graphs
incomparable with the class of outerplanar graphs. We show that every Halin graph that
is not a K4 has boxicity equal to 2.


Chapter 2
Upper bounds for boxicity
Roberts gave us an upper bound of n/2 for the boxicity of any graph on n vertices. We
shall now try to derive a different upper bound for boxicity in terms of the maximum
degree ∆ of the graph.
2.1 Previous upper bounds on boxicity
2.1.1 Boxicity is O(∆ lnn)
Lemma 1.10 tells us that the boxicity of a graph G is the minimum number of interval
supergraphs of G such that each non-edge (or “missing edge”) in G is a non-edge in at
least one of these interval supergraphs. One could try to devise some method by which
we can obtain supergraphs of G in such a way that each missing edge in G is missing
in one of these supergraphs. Of course, one could obtain supergraphs of G by adding
arbitrary sets of edges to G. But the catch is that we need only those supergraphs of G
that are also interval graphs. It seems difficult to systematically generate supergraphs
of G that are also interval graphs. In [18], Chandran and Sivadasan try to generate
interval supergraphs of G at random and come up with a simple randomized algorithm
that generates an interval graph representation of the input graph G on n vertices and
with maximum degree ∆ using ⌈(∆ + 1) lnn⌉ interval graphs with non-zero probability.
The existence of this algorithm proves the following theorem.
21

Chapter 2. Upper bounds for boxicity 22
Theorem 2.1 (Chandran and Sivadasan). Given a graph G on n vertices with
maximum degree ∆, box(G) ≤ ⌈(∆ + 2) lnn⌉.In Chapter 4, we extend this randomized construction to show that a similar upper
bound exists for cubicity.
2.1.2 Boxicity and average degree
The relationship between the boxicity of a graph and its average degree is also explored
in [18]. It is shown that in general the boxicity of a graph on n vertices with average
degree dav is not O(dav lnn) as there exist graphs with boxicity that is exponentially
larger than dav lnn. In Chapter 3, we show that even though such graphs exist, for most
graphs, boxicity is O(dav lnn).
2.2 Boxicity of bounded degree graphs
If the family of graphs under consideration has bounded degree, the upper bound of
⌈(∆ + 2) lnn⌉ for the boxicity is an improvement over previous bounds as it implies that
boxicity of graphs in that family is O(lnn). But is this the best possible for bounded
degree graphs? No matter what graph we take, it seems that the boxicity is always less
than or equal to ∆. Might it be the case that the boxicity of any graph with maximum
degree ∆ is O(∆)? The anwer to that question certainly does not appear to be easy. We
could first try and see if boxicity can be bounded from above by a function of ∆ alone.
Such an upper bound would be interesting as it would mean that the boxicity of graphs
with bounded degree—like expander graphs—is bounded no matter how large the graph
is. We shall now look at a simple proof that shows that boxicity is in fact O(∆2).
In order to avoid confusion, we shall use ∆(G) to denote the maximum degree of a
graph G for the remainder of this section. We shall show that for any graph G with
maximum degree ∆(G), box(G) ≤ 2∆(G)2. Let χ(G) denote the chromatic number of
G. We use Brooks’ theorem, which states that χ(G) ≤ ∆(G) for any connected graph G
unless it is an odd cycle or a complete graph. We also use the square G2 of a graph G,
Chapter 2. Upper bounds for boxicity 23
defined to be the graph obtained from G by adding edges joining nonadjacent vertices
that have a common neighbour in G. Note that since any vertex will become adjacent
to at most ∆(G) (∆(G) − 1) new vertices when the graph is squared, ∆(G2) ≤ ∆(G)2.
If G = G1∩G2∩· · ·∩Gk, then by Corollary 1.11, box(G1∩· · ·∩Gk) ≤ ∑ki=1 box(Gi);
we will use this fact.
Theorem 2.2. If G is a graph with ∆(G) = D, then box(G) ≤ 2D2.
Proof: Let n = |V (G)|. Let k = χ(G2), and let c be a proper k-coloring ofG2 using colors
1, . . . , k. For 1 ≤ i ≤ k, let Vi = u ∈ V (G) : c(u) = i (recall that V (G2) = V (G)). For
1 ≤ i ≤ k, let Hi be the complete graph with vertex set V (G) − Vi, and let Gi be the
graph with V (Gi) = V (G) and E(Gi) = E(G) ∪ E(Hi).
Consider vertices u and v. If they are adjacent in G, then they are adjacent in each
Gi, since E(G) ⊆ E(Gi). If they are not adjacent in G, then they are nonadjacent in
both Gc(u) and Gc(v). Hence G = G1 ∩ · · · ∩ Gk. Note that G2 will contain a triangle
if there is a vertex with degree 2 or more in G. Therefore, it is clear that G2 cannot
be an odd cycle except when n = 3, in which case it is a complete graph. If G2 is a
complete graph, we have D2 ≥ ∆(G2) = n−1 and therefore, box(G) ≤ 2D2 (because we
know that box(G) ≤ n/2). Thus, by Brooks’ theorem, we can assume that k = χ(G2) ≤∆(G2) ≤ D2. Now, it suffices to show that box(Gi) ≤ 2 for each i.
· · ·Vi
V − Vi
= Gi
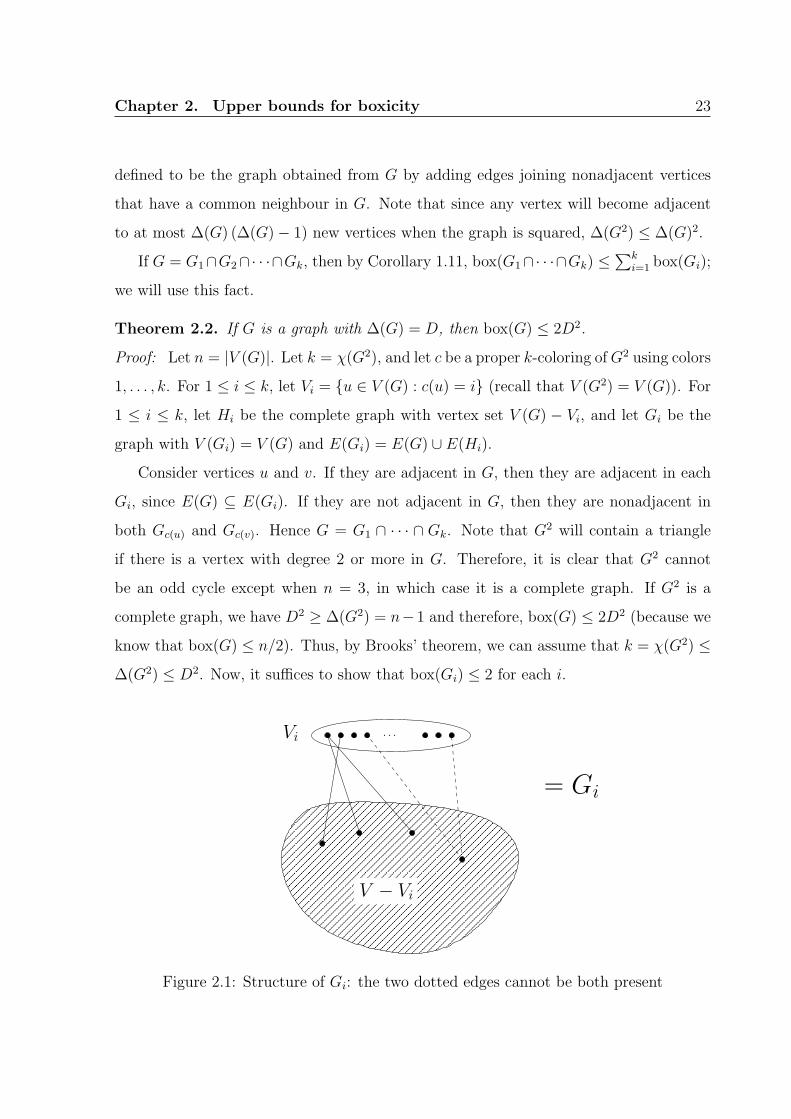
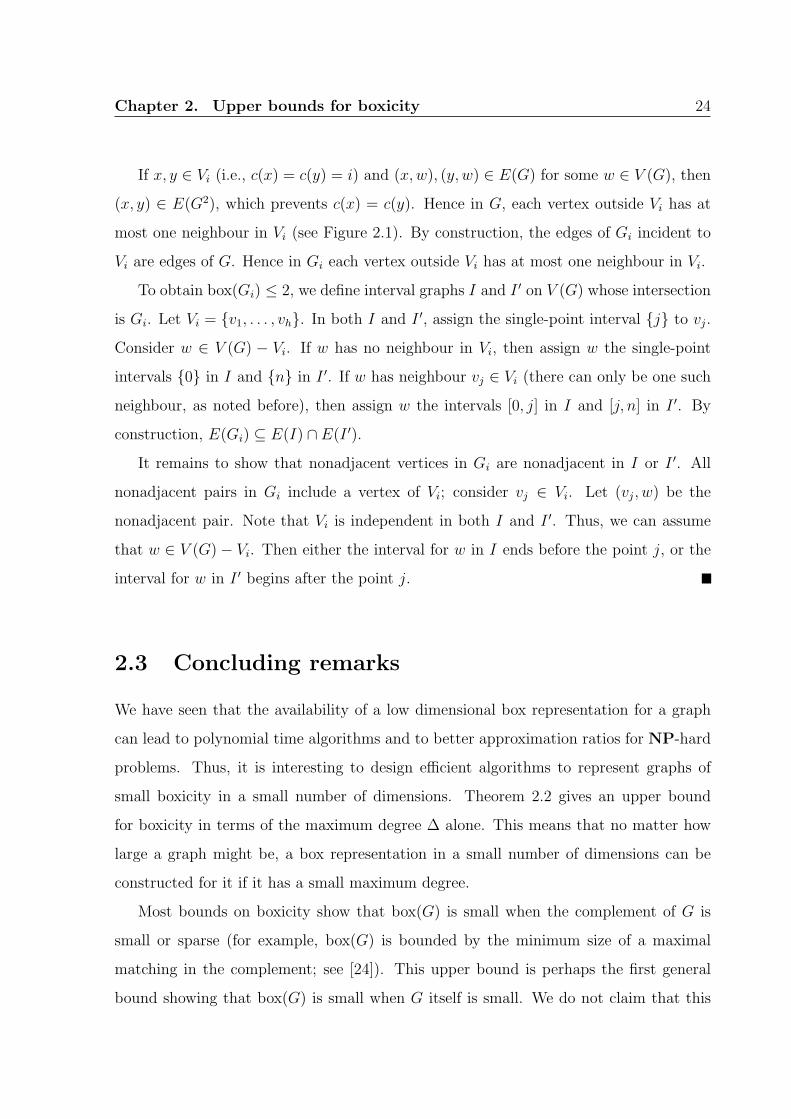
Figure 2.1: Structure of Gi: the two dotted edges cannot be both present
Chapter 2. Upper bounds for boxicity 24
If x, y ∈ Vi (i.e., c(x) = c(y) = i) and (x,w), (y, w) ∈ E(G) for some w ∈ V (G), then
(x, y) ∈ E(G2), which prevents c(x) = c(y). Hence in G, each vertex outside Vi has at
most one neighbour in Vi (see Figure 2.1). By construction, the edges of Gi incident to
Vi are edges of G. Hence in Gi each vertex outside Vi has at most one neighbour in Vi.
To obtain box(Gi) ≤ 2, we define interval graphs I and I ′ on V (G) whose intersection
is Gi. Let Vi = v1, . . . , vh. In both I and I ′, assign the single-point interval j to vj.
Consider w ∈ V (G) − Vi. If w has no neighbour in Vi, then assign w the single-point
intervals 0 in I and n in I ′. If w has neighbour vj ∈ Vi (there can only be one such
neighbour, as noted before), then assign w the intervals [0, j] in I and [j, n] in I ′. By
construction, E(Gi) ⊆ E(I) ∩ E(I ′).
It remains to show that nonadjacent vertices in Gi are nonadjacent in I or I ′. All
nonadjacent pairs in Gi include a vertex of Vi; consider vj ∈ Vi. Let (vj, w) be the
nonadjacent pair. Note that Vi is independent in both I and I ′. Thus, we can assume
that w ∈ V (G) − Vi. Then either the interval for w in I ends before the point j, or the
interval for w in I ′ begins after the point j.
2.3 Concluding remarks
We have seen that the availability of a low dimensional box representation for a graph
can lead to polynomial time algorithms and to better approximation ratios for NP-hard
problems. Thus, it is interesting to design efficient algorithms to represent graphs of
small boxicity in a small number of dimensions. Theorem 2.2 gives an upper bound
for boxicity in terms of the maximum degree ∆ alone. This means that no matter how
large a graph might be, a box representation in a small number of dimensions can be
constructed for it if it has a small maximum degree.
Most bounds on boxicity show that box(G) is small when the complement of G is
small or sparse (for example, box(G) is bounded by the minimum size of a maximal
matching in the complement; see [24]). This upper bound is perhaps the first general
bound showing that box(G) is small when G itself is small. We do not claim that this

Chapter 2. Upper bounds for boxicity 25
upper bound is optimal; but make the following conjecture instead.
Conjecture. For any graph G with maximum degree ∆, box(G) is O(∆).
Roberts’ graphs are a family of graphs that have boxicity Ω(∆). In fact, we do not
know of any graph that has boxicity greater than its maximum degree.
Since box(G) ≤ n/2 when G has n vertices (as shown in [51]), the upper bound
provided by Theorem 2.2 is of no use when ∆ >√n/2. Since for any graph G on n
vertices with maximum degree ∆, box(G) ≤ ⌈(∆ + 2) lnn⌉ as shown by Theorem 2.1,
the bound of 2∆2 given by Theorem 2.2 is better only when ∆ ≤ lnn.
We are now armed with two upper bounds for the boxicity of general graphs in terms
of the maximum degree. Both these bounds come in handy in the next chapter when we
look at the boxicity of random graphs. As mentioned in Section 2.1.2, there are families
of graphs for which the boxicity is exponentially larger than dav lnn, but we now exploit
the power of probabilistic techniques to show that such graphs are rare.


Chapter 3
Boxicity of random graphs
Though an O(dav lnn) upper bound does not exist for boxicity of a general graph on
n vertices with average degree dav, we now show that for almost all graphs, there does
exist an upper bound for boxicity that is O(dav lnn). First, we shall look at some basics
of the theory of random graphs.
3.1 Random graph preliminaries
Often, it is informative to look at graph properties from a statistical viewpoint. We
could ask such questions as “if a graph is randomly drawn from a collection of graphs,
what is the probability that the randomly chosen graph has property P?”. In order to
answer such questions, we need to define a probability space of graphs (we consider only
finite graphs here) from which we draw a graph at random. The two most popularly
used probability distributions (also called random graph models) are:
• The G(n, p) model: This is a probability space of all graphs on n vertices. The
act of drawing a graph at random from this model is defined by the following
random experiment. Toss a coin that turns up heads with probability p for each
of the(
n2
)
possible edges. If the coin turns up heads, then we decide that the
particular edge is present in the randomly drawn graph and the edge is not present
otherwise. Thus, each edge has an independent probability of p of being present
27

Chapter 3. Boxicity of random graphs 28
in the randomly drawn graph. Clearly, this is not a uniform distribution over all
graphs on n vertices. The probability of a graph with m edges to be the randomly
drawn graph is pm(1 − p)(n2)−m. Note that the distribution becomes uniform if
p = 12.
• The G(n,m) model: In this model, the randomly chosen graph is drawn uniformly
at random from the collection of all graphs on n vertices with m edges. Thus the
probability of any given graph on n vertices and m edges to occur as the randomly
chosen graph is the same, i.e. 1/(
Nm
)
where N =(
n2
)
.
We say that a given property P is true for almost all graphs if for a randomly chosen
graph G from the random graph model under consideration, Pr[G has property P ] → 1
when n → ∞. This can be seen as the mathematical way of saying that the proportion
of graphs without property P becomes negligibly small as n becomes large and therefore
“almost all” graphs can be thought to have this property.
3.2 Boxicity is O(dav lnn) for almost all graphs
The proof shows that for almost all graphs G drawn from the G(n,m) model, box(G) ∈O(c lnn) where c = 2m/n (refer to Section 1.4 for a description of the asymptotic
notation as we use it). We assume c > 1 as we are mainly interested in connected
graphs. But we first show the result for the G(n, p) model setting p = c/(n − 1). As
shown in [9], we can then carry over the result to the G(n,m) model since p = m/(
n2
)
.
Consider the G(n, p) model with p = c/(n− 1). Let G denote a random graph drawn
according to this model. For a vertex u, define a random variable du that denotes the
degree of u, i.e. du = |N(u)| =∑
v∈V (G),v 6=u eu,v where eu,v is an indicator random variable
whose value is 1 if (u, v) ∈ E(G) and 0 otherwise. Therefore, E[du] = p(n− 1) = c.
Case 1: c ≥ lnn.
Since du is the sum of independent Bernoulli random variables, we can use Chernoff
bound to bound the probability of du becoming large. In particular, we use the following

Chapter 3. Boxicity of random graphs 29
form of the Chernoff bound given in [3] for the rest of the proof.
Pr[X ≥ (1 + δ)E[X]] ≤ e−δ2E[X]2+δ (3.1)
for all δ > 1. Taking δ = 5, we get, Pr[du ≥ 6c] ≤ 1/n3. Now, by the union
bound, it follows that Pr[∆(G) ≥ 6c] = Pr[∃u ∈ V (G), du ≥ 6c] ≤ 1/n2. Using the re-
sult box(G) ≤ ⌈(∆ + 2) lnn⌉, we now have, box(G) ≤ (6c + 2) lnn with probability at
least 1 − 1/n2.
Case 2: c < lnn.
Let Su = V (G) −N(u) − u.
Let N ′(u) = v ∈ Su | ∃u′ ∈ N(u) such that (u′, v) ∈ E(G).
In this case, we will use a different technique to upper bound boxicity. Let the graph
G2 denote the square of G. That is, V (G2) = V (G) and (u, v) ∈ E(G2) if there is a path
of length 1 or 2 between u and v. Recall that the proof of Theorem 2.2 shows that for
any graph G, box(G) ≤ 2χ(G2) ≤ 2∆(G2) + 2. We will show below that if c < lnn, then
∆(G2) ≤ c + 6 lnn + 7c2 + 42c lnn, with high probability. The reader may note that
the degree of a vertex u in G2 equals |N(u)| + |N ′(u)|. We will now show that for any
vertex u, Pr[|N(u)| + |N ′(u)| /∈ O(c log n)] ≤ 3/n3.
Let k = c+ 6 lnn. We apply Chernoff bound (3.1) with δ = 6 lnn/c to obtain
Pr[du ≥ k] ≤ e−δ(6 ln n)/(2+δ) ≤ 1/n3
Let A ⊆ V (G) such that |A| < k. Let Z(A) denote the event that N(u) = A. Now, for
each vertex v ∈ Su, let Xv,A denote an indicator random variable indicating whether v ∈N ′(u) conditioned on the event Z(A). Note that for any vertex v ∈ Su, Pr[Xv,A = 1] ≤kp. Let XA =
∑
v∈SuXv,A. It follows that E[XA] ≤ kp(n− 1) = kc. Since XA is the sum
of independent Bernoulli random variables, we apply the Chernoff bound (3.1) by fixing
δ = 6kc/E[XA] to obtain Pr[XA ≥ 7kc] ≤ e−δ(6kc)/(2+δ) ≤ 1/n3.

Chapter 3. Boxicity of random graphs 30
Let the random variable Xu denote the cardinality of N ′(u). We now have,
Pr[Xu ≥ 7kc | du < k] =∑
A⊆V (G),|A|<k
Pr[(Xu ≥ 7kc) ∧ Z(A)]
=∑
A⊆V (G),|A|<k
Pr[XA ≥ 7kc] Pr[Z(A)] ≤ 1/n3
It follows that
Pr[Xu ≥ 7kc] = Pr[Xu ≥ 7kc | du < k] Pr[du < k]
+Pr[Xu ≥ 7kc | du ≥ k] Pr[du ≥ k]
≤ (1/n3)Pr[du < k] + (1/n3)Pr[Xu ≥ 7kc | du ≥ k] ≤ 2/n3
Let tu = |N(u)|+ |N ′(u)| = du +Xu. Combining the bounds on the values of du and Xu,
we get,
Pr[tu ≥ k + 7kc] ≤ Pr[du ≥ k] + Pr[Xu ≥ 7kc] ≤ 3/n3
Observe that ∆(G2) = maxu∈G tu. Thus, by applying the union bound, we obtain
Pr[
∆(G2) ≥ k + 7kc]
= Pr
∨
u∈V (G)
tu ≥ k + 7kc
≤ 3/n2
Thus, with high probability, ∆(G2) < k + 7kc = c + 6 lnn + 7c2 + 42c lnn. Recalling
that box(G) ≤ 2∆(G2) + 2, we obtain box(G) ∈ O(c lnn) with high probability, since
c < lnn.
Having shown that in the G(n, p) model, Pr[box(G) 6∈ O(c lnn)] ≤ 3/n2, the following
relation from page 35 of [9] helps us to extend our result to the G(n,m) model.
Pm(Q) ≤ 3m1/2Pp(Q)
where Q is a property of graphs of order n, and Pm(Q) and Pp(Q) are the probabilities
of a graph chosen at random from the G(n,m) or the G(n, p) models respectively to have

Chapter 3. Boxicity of random graphs 31
property Q given that p = m/(
n2
)
. Using this result, we now have, for a graph G drawn
randomly from the G(n,m) model,
Pr[box(G) 6∈ O(c lnn)] ≤ 9n−2√m ≤ 9/n
As c = 2m/n = dav, which is the average degree, we have shown that for almost all
graphs with a given average degree dav, the boxicity is O(dav lnn).
Thus we have the following theorem:
Theorem 3.1. For a random graph G on n vertices and m edges drawn according to
G(n,m) model,
Pr
[
box(G) = O
(
2m
nlnn
)]
≥ 1 − 9
n
3.3 Remarks
We know that box(G) ≤ tw(G) + 2 [16]. It is well known that almost all graphs on n
vertices and m = cn edges (for a sufficiently large constant c) have treewidth Ω(n) [37].
From the discussion in this chapter, we know that almost all graphs on n vertices and m
edges have boxicity O(dav lnn) where dav = 2m/n. An implication of this is that when c
is a large enough constant, for almost all graphs on m = cn edges, there is an exponential
gap between their boxicity and treewidth. Hence it is interesting to reconsider those NP-
hard problems that are polynomial time solvable in bounded treewidth graphs and see
whether they are also polynomial time solvable for bounded boxicity graphs.


Chapter 4
A randomized construction for
cubicity
Let us now turn our attention to the cubicity of graphs. Recall that the cubicity of a
graph is the minimum dimension in which it can be represented as the intersection of
k-cubes. It is immediate that the cubicity of a graph is always at least its boxicity as a
k-cube representation for a graph is also a k-box representation for it.
It seems natural to think about the relationship between the boxicity and cubicity of
a graph. Chandran and K. A. Mathew show in [15] that cub(G)box(G)
≤ ⌈log2 n⌉ for any graph G
on n vertices. In Chapter 2, we saw two upper bounds on the boxicity of any graph G on n
vertices and having maximum degree ∆, namely, box(G) = O(∆ lnn) and box(G) ≤ 2∆2.
Combining these with the result cub(G)box(G)
≤ ⌈log2 n⌉, we get cub(G) = O(∆ ln2 n) and
cub(G) ≤ 2∆2⌈log2 n⌉. In this chapter, we suitably adapt the randomized construction
of [18] to show that cub(G) is O(∆ lnn) which is an improvement over both these bounds
on cubicity.
Let G be a graph on n vertices with maximum degree ∆. We first show a ran-
domized algorithm RAND to construct the cube representation of G in ⌈4(∆ + 1) lnn⌉dimensions. We then give a detailed exposition of the derandomization technique by
demonstrating how the algorithm RAND can be derandomized to obtain a polynomial
time deterministic algorithm DET that gives a cube representation of G in the same
33

Chapter 4. A randomized construction for cubicity 34
number of dimensions. Both these algorithms compute an indifference graph represen-
tation of G using ⌈4(∆ + 1) lnn⌉ indifference graphs. The algorithms construct equal
interval representations (recall the definition from Section 1.3) for each graph in the
indifference graph representation.
4.1 The algorithm RAND
In this section we describe the randomized algorithm RAND that computes a cube
representation in O(∆ lnn) dimensions for any graph G on n vertices and maximum
degree ∆ .
For ease of notation we will let V = V (G) for the remainder of this chapter. The
reader might find it useful to recall the definition of a permutation as given in Definition
1.2.
Definition 4.1. Let π be a permutation of a set S. Let X ⊆ S. The restriction of π
onto X, denoted as πX , is a permutation of X defined as follows. Let X = u1, . . . , ursuch that π(u1) < π(u2) < · · · < π(ur). Then πX(u1) = 1, πX(u2) = 2, . . . , πX(ur) = r.
Construction of the indifference supergraph M(G, π,A):
Let π be a permutation on V and let A be a subset of V . We define M(G, π,A) to be
an indifference graph G′ with V (G′) = V constructed as follows.
Let B = V − A. We shall construct f , an equal interval representation (recall
Definition 1.16) with interval length n for G′ as follows:
∀u ∈ B, define f(u) = n+ π(u),
∀u ∈ A and N(u) ∩B = ∅, define f(u) = 0,
∀u ∈ A and N(u) ∩B 6= ∅, define f(u) = maxx∈N(u)∩B π(x).
Thus, two vertices u and v will have an edge in G′ if and only if |f(u) − f(v)| ≤ n.
Clearly, G′ is an indifference graph. It can be seen that the vertices in B induce a clique
in G′ as the intervals assigned to each of them contain the point 2n. Similarly, all the

Chapter 4. A randomized construction for cubicity 35
vertices in A also induce a clique in G′ as the intervals mapped to each contain the point
n.
Now, we show that G′ is a supergraph of G. To see this, take any edge (u, v) ∈ E(G).
If u and v both belong to A or if both belong to B, then (u, v) ∈ E(G′) as we have
observed above. If this is not the case, then we can assume without loss of generality that
u ∈ A and v ∈ B. Let t = maxx∈N(u)∩B π(x). Obviously, t ≥ π(v), since v ∈ N(u) ∩ B.
From the definition of f , we have f(u) = t and we have f(v) = n + π(v). Therefore,
f(v) − f(u) = n + π(v) − t and since t ≥ π(v), it follows that f(v) − f(u) ≤ n. This
shows that (u, v) ∈ E(G′).
We are now ready to give the randomized algorithm RAND that, given an input
graph G, outputs an indifference supergraph G′ of G.
RAND
Input: G.
Output: G′ which is an indifference supergraph of G.
begin
1. Generate a permutation π of V uniformly at random.
2. for each vertex u ∈ V ,
Toss an unbiased coin to decide whether u should belong to A
or to B (i.e. Pr[u ∈ A] = Pr[u ∈ B] = 12).
3. return G′ = M(G, π,A).
end
Lemma 4.2. Let e = (u, v) /∈ E(G). Let G′ be the graph returned by RAND(G).
Then,
Pr[e ∈ E(G′)] ≤ 1
2+
1
4
(
d(u)
d(u) + 1+
d(v)
d(v) + 1
)
≤ 2∆ + 1
2∆ + 2
where d(u) and d(v) denote the degrees of the vertices u and v respectively in G.

Chapter 4. A randomized construction for cubicity 36
Proof: Let π be the permutation and A,B be the partition of V generated randomly
by RAND(G). An edge e = (u, v) /∈ E(G) will be present in G′ if and only if one of the
following cases occur:
1. Both u, v ∈ A or both u, v ∈ B
2. u ∈ A, v ∈ B and maxx∈N(u)∩B π(x) > π(v)
3. u ∈ B, v ∈ A and maxx∈N(v)∩B π(x) > π(u)
Let P1 denote the probability of situation 1 to occur, P2 that of situation 2 and P3 that of
situation 3. Since all the three cases are mutually exclusive, Pr[e ∈ E(G′)] = P1+P2+P3.
It can be easily seen that P1 = Pr[u, v ∈ A] + Pr[u, v ∈ B] = 14
+ 14
= 12. P2 and P3 can
be calculated as follows:
P2 = Pr
[
u ∈ A ∧ v ∈ B ∧ maxx∈N(u)∩B
π(x) > π(v)
]
Note that creating the random permutation and tossing the coins are two different ex-
periments independent of each other. Moreover, the coin toss for each vertex is an
experiment independent of all other coin tosses. Thus, the events u ∈ A, v ∈ B and
maxx∈N(u)∩B π(x) > π(v) are all independent of each other. Therefore,
P2 = Pr[u ∈ A] × Pr[v ∈ B] × Pr
[
maxx∈N(u)∩B
π(x) > π(v)
]
Now, Pr[
maxx∈N(u)∩B π(x) > π(v)]
≤ Pr[
maxx∈N(u) π(x) > π(v)]
= p (say). Let X =
v ∪ N(u) and let πX be the restriction of π onto X. Then p is the probability
that the condition πX(v) 6= |X| is satisfied. Since πX can be any permutation of
|X| = d(u) + 1 elements with equal probability 1(d(u)+1)!
and the number of permu-
tations which satisfy our condition is d(u)!d(u), p = d(u)!d(u)(d(u)+1)!
= d(u)d(u)+1
. Therefore,
Pr[
maxx∈N(u)∩B π(x) > π(v)]
≤ d(u)d(u)+1
. It can be easily seen that Pr[u ∈ A] = 12
and
Pr[v ∈ B] = 12. Thus,
P2 ≤1
2× 1
2× d(u)
d(u) + 1=
1
4
(
d(u)
d(u) + 1
)

Chapter 4. A randomized construction for cubicity 37
Using similar arguments,
P3 ≤1
4
(
d(v)
d(v) + 1
)
Thus,
Pr[e ∈ E(G′)] = P1 + P2 + P3
≤ 1
2+
1
4
(
d(u)
d(u) + 1+
d(v)
d(v) + 1
)
Hence the lemma.
Theorem 4.3. Given a simple, undirected graph G on n vertices with maximum degree
∆, cub(G) ≤ ⌈4(∆ + 1) lnn⌉.Proof: Let us invoke RAND(G) k times so that we obtain k indifference supergraphs
of G which we will call G′1, G
′2, . . . , G
′k. Let G′′ = G′
1 ∩G′2 ∩ · · · ∩G′
k. Obviously, G′′ is a
supergraph of G. If G′′ = G, then we have obtained an indifference graph representation
for G using k indifference graphs, which means that cub(G) ≤ k. We now estimate an
upper bound for the value of k so that G′′ = G.
Let (u, v) /∈ E(G).
Pr[(u, v) ∈ E(G′′)] = Pr
[
∧
1≤i≤k
(u, v) ∈ E(G′i)
]
≤(
2∆ + 1
2∆ + 2
)k
(From Lemma 4.2)

Chapter 4. A randomized construction for cubicity 38
Pr[G′′ 6= G] = Pr
∨
(u,v)/∈E(G)
(u, v) ∈ E(G′′)
≤ n2
2
(
2∆ + 1
2∆ + 2
)k
=n2
2
(
1 − 1
2(∆ + 1)
)k
≤ n2
2× e−
k2(∆+1)
Note that we used the inequality 1 + x ≤ ex for the last step of the derivation. Now,
choosing k = 4(∆ + 1) lnn, we get,
Pr[G′′ 6= G] ≤ 1
2
Therefore, if we invoke RAND k = ⌈4(∆+1) lnn⌉ times, there is a non-zero probability
that G′1, G
′2 . . . , G
′k form an indifference graph representation of G. Thus, there exists an
indifference graph representation of G using ⌈4(∆ + 1) lnn⌉ graphs which implies that
cub(G) ≤ ⌈4(∆ + 1) lnn⌉.
Theorem 4.4. Given a graph G on n vertices with maximum degree ∆. Let G1, G2, . . . ,
Gk be k indifference supergraphs of G generated by k invocations of RAND(G) and let
G′′ = G′1 ∩G′
2 ∩ . . . ∩G′k. Then, for k ≥ 6(∆ + 1) lnn, G′′ = G with high probability.
Proof: Choosing k = 6(∆ + 1) lnn in the final step of proof of Theorem 4.3, we get,
Pr[G′′ 6= G] ≤ 1
2n
Thus, if k ≥ 6(∆ + 1) lnn, G′′ = G with high probability.
Theorem 4.5. Given a graph G with n vertices, m edges and maximum degree ∆, with
high probability, its cube representation in ⌈6(∆ + 1) lnn⌉ dimensions can be generated

Chapter 4. A randomized construction for cubicity 39
in O(∆(m+ n) lnn) time.
Proof: We assume that a random permutation π on n vertices can be computed in O(n)
time and that a random coin toss for each vertex takes only O(1) time. We take n steps
to assign intervals to the n vertices. Suppose in a given step, we are attempting to assign
an interval to vertex u. If u ∈ B, then we can assign the interval [n + π(u), 2n + π(u)]
to it in constant time. If u ∈ A, we look at each neighbour of the vertex u in order to
find out a neighbour v ∈ B such that π(v) = maxx∈N(u)∩B π(x) and assign the interval
[π(v), n+π(v)] to u. It is obvious that determining this neighbour v will take just O(d(u))
time. Since the number of edges in the graph m = 12Σu∈V d(u), one invocation of RAND
needs only O(m + n) time. Since we need to invoke RAND O(∆ lnn) times (see the
proof of Theorem 4.3), the overall algorithm that generates the cube representation in
⌈6(∆ + 1) lnn⌉ dimensions runs in O(∆(m+ n) lnn) time.
4.2 Derandomizing RAND
The above algorithm can be derandomized by adapting the techniques used in [18] to
obtain a deterministic polynomial time algorithm DET with the same performance guar-
antee on the number of dimensions for the cube representation.
Let t = ⌈4(∆ +1) lnn⌉. Given G, DET selects t permutations π1, . . . , πt and t subsets
A1, . . . , At of V in such a way that the indifference graphs M(G, πi, Ai) | 1 ≤ i ≤ tform an indifference graph representation of G.
4.2.1 Some notations
A permutation π can also be written as an ordered set of vertices 〈v1, v2, . . . , vn〉. This
notation means that π−1(i) = vi, for 1 ≤ i ≤ n. Let b : V → 0, 1 so that b(v) = 0
denotes v ∈ A and b(v) = 1 denotes v ∈ B. We construct π by choosing the vertices
v1, v2, . . . , vn in that order. As we choose each vertex v, we also decide whether it should
belong to A or B by setting the bit b(v) to 0 or 1. After step i, we have an ordered set

Chapter 4. A randomized construction for cubicity 40
of i “vertex-bit” pairs, Vi = 〈(v1, b1), (v2, b2), . . . , (vi, bi)〉 where bj = b(vj), for 1 ≤ j ≤ i.
Let Vi = v1, v2, . . . , vi. Also define function mVi: Vi → 0, 1 where mVi
(vj) = bj, for
1 ≤ j ≤ i. Let πVi: Vi → 1, . . . , i denote the ordering of Vi defined by πVi
(vj) = j.
Note that πVncan also be seen as a permutation of V . Also let AVi
= vj : mVi(vj) = 0.
We also define an operator ⋄ as:
Vi ⋄ (u, c) = 〈(v1, b1), (v2.b2), . . . , (vi, bi), (u, c)〉.
4.2.2 A closer look at RAND
Observe that in RAND, G′ is the outcome of a random experiment since in essence,
RAND computes a random permutation π and selects the bit b(v) (mentioned above)
for each vertex v at random. For each non-edge e = (u, v) ∈ E(G), define a random
variable xe such that xe = 0 if and only if one of the following is true : (i) Both u, v ∈ A
or both u, v ∈ B, (ii) u ∈ A, v ∈ B and maxx∈N(u) π(x) > π(v), (iii) u ∈ B, v ∈ A and
maxx∈N(v) π(x) > π(u). We set xe = 1 for all other cases. It can be easily observed that
(xe = 1) ⇒ e 6∈ E(G′).
For any set H ⊆ E(G), define random variable XH =∑
e∈H xe. It is easy to see that
there will be at least XH edges in H that are missing in G′.
Given Vi = 〈(v1, b1), (v2, b2), . . . , (vi, bi)〉, let C(Vi) denote the event that v1, v2, . . . , vi
form the first i elements of the permutation π and b(vj) = bj for 1 ≤ j ≤ i.
Define fe(Vi) = E[xe|C(Vi)] = Pr[xe = 1|C(Vi)]. Also for H ⊆ E(G), define FH(Vi) =
E[XH |C(Vi)] =∑
e∈H fe(Vi).
We will let V0 denote the empty ordering—i.e., one that contains no vertex-bit pairs.
Thus, C(V0) is the event that the status of every vertex (meaning the position in the
final permutation and whether the vertex should belong to set A or B) is undetermined.
Therefore, fe(V0) = Pr[xe = 1] ≥ 12(∆+1)
(note that the proof of Lemma 4.2 actually
proves that Pr[xe = 0] ≤ 2∆+12∆+2
) and therefore FH(V0) =∑
e∈H fe(V0) ≥ |H|2(∆+1)
.

Chapter 4. A randomized construction for cubicity 41
4.2.3 Constructing the permutations and subsets
Given H ⊆ E(G), we deterministically construct a permutation π and a subset A of V
so that at least |H|2(∆+1)
of the non-edges in H are missing in M(G, π,A). Our strategy is
to start with V0 and construct V1, V2, . . . , Vn in n steps. The final permutation π and the
subset A of V are given by πVnand AVn
respectively. After step i, we have determined
an ordering Vi of vertex-bit pairs. During step i + 1, we find a suitable vertex-bit pair
(u, c) where u ∈ V − Vi and c ∈ 0, 1 that can be added to Vi using the ⋄ operator so as
to get Vi+1. Recall that FH(Vi) is actually E[XH |Vi], i.e., it is the expected value of XH
if in the ith step, we have determined the status of i vertices as given in Vi. When we
are constructing Vi+1 in the the (i+ 1)th step, we have 2|V − Vi| possible choices, since
we can pick any of the |V − Vi| remaining vertices to be u and at the same time we have
two choices for c—0 or 1. Thus, after any step i, we have 2|V − Vi| possible choices for
Vi+1. It can be easily seen that E[XH |Vi] is the average of E[XH |Vi+1] values over all the
different choices of Vi+1. Therefore,
FH(Vi) = E[XH |Vi]
=1
2|V − Vi|
∑
u∈V −Vi,c∈0,1
FH(Vi ⋄ (u, c))
Now, in order to construct Vi+1, we take such a vertex as u and such a value for c and
make Vi+1 = Vi ⋄ (u, c) so that FH(Vi+1) is maximized (we shall show later that FH(Vi+1)
can be calculated in polynomial time). It is obvious that if we proceed in this manner,
FH(Vi+1) ≥ FH(Vi), for 0 ≤ i < n. Therefore, FH(Vn) ≥ FH(V0) ≥ |H|2(∆+1)
. Note that
if G′ = M(G, π,A), where π = πVnand A = AVn
, then FH(Vn) ≤ |H ∩ E(G′)|. Thus,
|H ∩ E(G′)| ≥ |H|2(∆+1)
. We can summarize the procedure for constructing Vn and the
indifference graph G′ associated with Vn as the algorithm DET′ given below:
DET′
Input: G, H ⊆ E(G).
Output: G′ which is an indifference supergraph of G, such that

Chapter 4. A randomized construction for cubicity 42
|E(G′) ∩H| ≥ |H|2(∆+1)
.
begin
for i from 1 to n
max := 0, v := (0, 0)
for u ∈ V − Vi−1
for c ∈ 0, 1f := FH(Vi−1 ⋄ (u, c))
if f ≥ max, then v := (u, c), max := f
Vi := Vi−1 ⋄ vreturn G′ = M(G, πVn
, AVn).
end
It is easily observed that DET′ runs deterministically in polynomial time if each
FH(Vi) can be computed in polynomial time. But calculation of each FH(Vi)
=∑
e∈H fe(Vi) in polynomial time is possible only if we can calculate fe(Vi) in poly-
nomial time.
4.2.4 Calculating fe(Vi)
Let e = (u, v) ∈ E(G). fe(Vi) is the probability that xe = 1 given C(Vi) has happened.
We will analyze the different situations that can occur. We will let π denote the permu-
tation given by πVn.
1. If u, v ∈ Vi:
In this case, the status of u and v have already been determined. Therefore, we
can tell for sure whether xe is 1 or 0. Recalling that fe(Vi) = Pr[xe = 1|C(Vi)],
this means that fe(Vi) will be either 1 or 0. If the bits that have been selected for
u and v, mVi(u) and mVi
(v) respectively, are equal, then u and v are either both in
A or both in B. In that case, xe = 0 and therefore fe(Vi) = 0. Now, consider the

Chapter 4. A randomized construction for cubicity 43
case mVi(u) 6= mVi
(v). Let us assume without loss of generality that u ∈ A and
v ∈ B. If N(u) 6⊆ Vi, there is some neighbour x of u such that π(x) > π(v). Even
if N(u) ⊆ Vi, there may be some neighbour of u, say x, such that πVi(x) > πVi
(v).
In both these cases, xe = 0 by definition of xe. Thus xe = 1 only if N(u) ⊆ Vi and
maxx∈N(u) πVi(x) < πVi
(v). We summarize these below:
Case 1 : If mVi(u) = mVi
(v), fe(Vi) = 0
Case 2 : If mVi(u) 6= mVi
(v)
let u ∈ A, v ∈ B.
Case 2.1 : If N(u) ⊆ Vi and maxx∈N(u) πVi(x) < πVi
(v), fe(Vi) = 1
Case 2.2 : otherwise, fe(Vi) = 0
2. If u ∈ Vi, v 6∈ Vi :
Here, we know about u’s position in the final permutation and also whether u is
in set A or B. But we have no such information about v.
If u ∈ A, then xe = 1 if and only if v ∈ B and also maxx∈N(u) π(x) < π(v). This
means that all neighbours of u should come before v in the final permuation π.
We know that those neighbours of u that are in Vi will anyway come before v in
the final permutation. Now, let Mu denote the set of neighbours of u that are not
there in Vi, i.e., Mu = N(u) ∩ (V − Vi). Let ku = |Mu|. It is easy to see that
fe(Vi) is the probability that v ∈ B and all the vertices in Mu come before v in the
final permutation. Obviously, Pr[v ∈ B] = 12. Now, let X = Mu ∪ v. Consider
the restriction of π onto X, denoted by πX . Pr[
maxx∈N(u) π(x) < π(v)|C(Vi)]
=
Pr[v is the last element in the permutation πX ] = Pr[πX(v) = ku + 1] = ku!(ku+1)!
=
1ku+1
. Therefore, fe(Vi) = 12(ku+1)
.
If u ∈ B, then fe(Vi) is the probability that v ∈ A and all neighbours of v come
before u in the final permutation. Whether all neighbours of v come before u can
be determined right away as we have already created the permutation at least till
the position of u. Thus we check whether N(v) ⊆ Vi and maxx∈N(v) πVi(x) < πVi
(u)

Chapter 4. A randomized construction for cubicity 44
and set fe(Vi) = 0 if not. If the condition is satisfied, still v might be put in set B
itself with probability 12
and thus xe can become 0. Thus, we set fe(Vi) = 12
if the
condition is satisfied.
We summarize below:
Case 1 : If u ∈ A (i.e. mVi(u) = 0),
fe(Vi) =1
2(ku + 1), where ku = |N(u) ∩ (V − Vi)|.
Case 2 : otherwise, (i.e. u ∈ B,mVi(u) = 1)
Case 2.1 : if N(v) ⊆ Vi and maxx∈N(v) πVi(x) < πVi
(u), fe(Vi) = 12
Case 2.2 : otherwise, fe(Vi) = 0
3. If u, v 6∈ Vi :
The positions of neither u nor v have been determined. fe(Vi) is the probability
that xe = 1, which is the probability that given C(Vi) has happened,
(i) u ∈ A and v ∈ B and maxx∈N(u) π(x) < π(v), or
(ii) u ∈ B and v ∈ A and maxx∈N(v) π(x) < π(u).
Note that cases (i) and (ii) are mutually exclusive. Let Mu denote the set of neigh-
bours of u that are not present in Vi, i.e. Mu = N(u)∩(V −Vi). Similarly, let Mv =
N(v)∩ (V − Vi). Let ku = |Mu| and kv = |Mv|. As we observed in the previous sec-
tion, Pr[
maxx∈N(u) π(x) < π(v)]
= 1ku+1
. Similarly, Pr[
maxx∈N(v) π(x) < π(u)]
=
1kv+1
. Also, it is easy to see that Pr[u ∈ A ∧ v ∈ B] = Pr[u ∈ B ∧ v ∈ A] = 14.

Chapter 4. A randomized construction for cubicity 45
Therefore, fe(Vi) can be computed as,
fe(Vi) = Pr[u ∈ A ∧ v ∈ B] × Pr
[
maxx∈N(u)
π(x) < π(v)
]
+Pr[u ∈ B ∧ v ∈ A] × Pr
[
maxx∈N(v)
π(x) < π(u)
]
=1
4
(
1
ku + 1
)
+1
4
(
1
kv + 1
)
=1
4
(
1
ku + 1+
1
kv + 1
)
Searching for a given vertex in the set Vi obviously takes only polynomial time.
Since the neighbours of any given vertex can also be determined in polynomial time, it
follows that the value ku for any vertex u can be computed in polynomial time as well.
Therefore, at any given stage, fe(Vi) and hence FH(Vi) can be computed in polynomial
time. Thus, it follows that the algorithm DET′ runs in polynomial time. All of this can
be summarized in the following lemma.
Lemma 4.6. DET′, on input G and H, where H ⊆ E(G), outputs in polynomial time
an indifference supergraph G′ of G such that |E(G′) ∩H| ≥ |H|2(∆+1)
.
Proof: Follows from the discussions in the previous sections.
4.2.5 The algorithm DET
Our main algorithm DET constructs the indifference graph representation of an input
graph G using ⌈4(∆ + 1) lnn⌉ indifference graphs. It invokes DET′ as a subroutine. It
initially sets H to be the set of non-edges in G and runs DET′ with G and H as input.
The indifference graph G′ output by DET′ will have some non-edges in H missing. We
remove those non-edges from H and repeat the procedure. Each time, G′ is added to a
list L of indifference supergraphs of G. The algorithm stops when H becomes empty, i.e.
every non-edge in G is missing in one of the indifference graphs that have been added to
L. The algorithm then outputs L as the indifference graph representation of G.

Chapter 4. A randomized construction for cubicity 46
DET
Input: G.
Output: An indifference graph representation of G.
begin
L := ∅H := E(G)
while H 6= ∅G′ := DET′(G,H)
Add G′ to L
H := H − E(G′)
return L.
end
Let Hi denote the set H after i iterations of the while loop. Therefore, H0 = E(G).
From Lemma 4.6, we have
|Hi| ≤ |H0|(
1 − 1
2(∆ + 1)
)i
≤ n2
2
(
1 − 1
2(∆ + 1)
)i
≤ n2
2· e
−i2(∆+1) .
For i ≥ 4(∆ + 1) lnn, |Hi| ≤ 1/2 < 1. Therefore H becomes empty after ⌈4(∆ + 1) lnn⌉iterations implying that the while loop does not run for more than that many iterations.
Each graph added to L is an indifference supergraph of G and each non-edge in H is
removed only when that non-edge is missing in the graph just added to L. Thus, when
the loop exits, L is a set of indifference supergraphs of G such that each non-edge in G is
missing in at least one graph in L. This shows that DET outputs an indifference graph
representation using ⌈4(∆ + 1) lnn⌉ graphs.

Chapter 4. A randomized construction for cubicity 47
Tight example:
Consider the case when G is a complete binary tree of height d = log n. Using the
results shown in [14], we can see that cub(G) ≥ dlog 2d
= log nc1+log log n
where c1 is a constant.
Therefore, cub(G) = Ω( log nlog log n
). From Theorem 4.3, cub(G) ≤ 4(∆ + 1) lnn = 16 lnn =
c2 log n, where c2 is a constant. Therefore, the upper bound provided by Theorem 4.3 is
tight up to a factor of O(log log n).
4.3 A useful result
The simple technique of randomly constructing indifference supergraphs of a graph has
helped us prove that for any graph G on n vertices and having maximum degree ∆,
cub(G) ≤ ⌈4(∆ + 1) lnn⌉. We had seen in Chapter 2 that box(G) = O(∆ lnn). Now
we know that even cub(G) = O(∆ lnn). Section 4.2 showed how the randomness in the
procedure can be removed to obtain a deterministic algorithm that constructs the cube
representation of an input graph in ⌈4(∆ + 1) lnn⌉ dimensions.
What makes this upper bound more interesting is the fact that it comes in handy
while proving various other results about cubicity. In the next chapter, the upper bound
and the construction used to derive it are employed to prove a new upper bound on
cubicity in terms of the bandwidth of the graph. The same construction is used again in
Chapter 6 where we show that the upper bound of O(∆ lnn) on cubicity can be improved
substantially for the class of interval graphs.


Chapter 5
Cubicity and bandwidth
Given an undirected graph G = (V,E) on n vertices, a linear ordering of G is a bijection
f : V (G) → 1, . . . , n. The width of the linear ordering f is defined as max(u,v)∈E |f(u)−f(v)|. The bandwidth minimization problem is to compute f with minimum possible
width.
Definition 5.1. The bandwidth of G denoted as bw(G) is the minimum possible
width achieved by any linear ordering of G. A bandwidth ordering of G is a linear
ordering of G with width bw(G).
It can be easily seen that if ∆ is the maximum degree of G, then ⌈∆/2⌉ ≤ bw(G) ≤n − 1. We now present two upper bounds on the cubicity of a graph in terms of its
bandwidth. For any graph G with bandwidth b and maximum degree ∆,
• cub(G) = O(∆ ln b)
We make use of the construction used in the proof of Theorem 4.3 and improve the
O(∆ lnn) bound given by the theorem. A deterministic algorithm that outputs the
cube representation of a graph in O(∆ ln b) dimensions given a bandwidth ordering
of it is presented. Note that the bandwidth b is at most n and b is much smaller
than n for many well-known graph classes.
• cub(G) ≤ b+ 1
We analyze the bandwidth ordering of a graph in detail and show that there exists
49
Chapter 5. Cubicity and bandwidth 50
a cube representation in b + 1 dimensions for any graph with bandwidth b. The
proof can be used to construct a deterministic algorithm that outputs the cube
representation of an input graph G in b + 1 dimensions, given a linear ordering of
G with width b in O(b · n) time. Note that in cases where ∆ is Ω(b/ log b), this
algorithm produces a cube representation in a lower number of dimensions than
the previous one.
Combining the above two algorithms we can construct the cube representation of G in
O(minb,∆ ln(b)) dimensions given a linear ordering of G with width b in polynomial
time. Clearly, this upper bound on cubicity is exponentially better than Roberts’ bound
of 2n/3 [51] for many well-known graph classes.
A note on bandwidth computation:
Our algorithms to compute the cube representation of a graph G take as input a linear
ordering of G. The smaller the width of this ordering, the lesser the number of dimensions
of the cube representation of G computed by these algorithms. Thus, it would be best if
a bandwidth ordering of G can be obtained. But computing the bandwidth is an NP-
complete problem and approximating the bandwidth of G within a ratio better than k
for every k ∈ N is also NP-complete [61]. Feige [29] gives a O(log3(n)√
log n log log n)
factor approximation algorithm to compute the bandwidth and also the corresponding
linear ordering for general graphs. We can use this algorithm in combination with our
first algorithm to obtain a polynomial time deterministic algorithm to construct the cube
representation of G in O(∆(ln b+ln lnn)) dimensions, given only G. Also, for bandwidth
computation, several algorithms with good heuristics are known that perform very well
in practice [60].
5.1 Cube representation in O(∆ ln b) dimensions
In this section we show an algorithm DETBAND to construct the cube representation
of G = (V,E) in O(∆ ln b) dimensions given a linear arrangement A of V (G) with width

Chapter 5. Cubicity and bandwidth 51
b. The DETBAND algorithm internally invokes the DET algorithm (see Section 4.2).
Let the linear arrangement A be v1, . . . , vn. For ease of presentation, assume that n is
a multiple of b. Define a partition B0, . . . , Bk−1 of V (G) where k = n/b, where Bj =
vjb+1, . . . , vjb+b. Let Hi for 0 ≤ i ≤ k−2 be the induced subgraph of G on the vertex set
Bi ∪Bi+1. Since for any i, |V (Hi)| = 2b, we have cub(Hi) ≤ ⌈4(∆ + 1) ln(2b)⌉ = t (say).
Let H1i , . . . , H
ti be the indifference graph representation for Hi produced by DET when
given Hi as the input. Let g1i , . . . , g
ti be their corresponding equal interval representations
with interval length n 1.
We shall define graphs I0, G0, G1 and G2 such that G = I0 ∩G0 ∩G1 ∩G2. Clearly,
these graphs all need to be supergraphs of G such that any edge not present in G is
missing in at least one of them. We can categorize the non-edges in G into the following
classes:
1. (u, v) 6∈ E(G) such that u ∈ Bi and v ∈ Bj and |i− j| > 1,
2. (u, v) 6∈ E(G) such that u ∈ Bi and v ∈ Bi+1, and
3. (u, v) 6∈ E(G) such that u, v ∈ Bi.
We construct I0 in such a way that all non-edges of type 1 are missing in I0. For
0 ≤ s ≤ k − 2, the non-edges between vertices in Hs (which includes all the non-edges
between blocks Bs and Bs+1 and also the type 3 non-edges in Bs and Bs+1) are taken
care of in the graph Gs mod 3. Note that the type 3 non-edges in Bs will be missing in
both Gs mod 3 and G(s−1) mod 3. The formal definition of these graphs follows.
Define, for 0 ≤ i ≤ 2, the graph Gi with V (Gi) = V (G) as the intersection of t
indifference graphs Ii,1, . . . , Ii,t. The indifference graph Ii,j is defined by fi,j, an equal
interval representation with interval length n for it. For each vertex u ∈ V (Gi), define
fi,j(u) as follows:
If u ∈ V (Hs) such that s ∈ i, i+ 3, i+ 6, . . ., then define fi,j(u) = gjs(u).
Otherwise, define fi,j(u) = n.
1Note that throughout this chapter, the term “equal interval representation” is considered to be
defined in the way it is defined in Definition 1.16.

Chapter 5. Cubicity and bandwidth 52
The indifference graph I0 is constructed by assigning to each vertex in Bi the interval
[in, (i+ 1)n], for 0 ≤ i ≤ k − 1.
We prove that G = I0 ∩G0 ∩G1 ∩G2 which by Corollary 1.20 shows that cub(G) ≤3t+ 1 ≤ 12(∆ + 1)⌈ln(2b)⌉ + 1 or cub(G) = O(∆ ln b).
The construction described above is given below as the algorithm DETBAND that
given G and an arrangement A with width b of V (G), outputs I0 ∪ Ii,j | 0 ≤ i ≤2 and 1 ≤ j ≤ t, an indifference graph representation of G using 3t + 1 indifference
graphs where t = ⌈4(∆+1) ln(2b)⌉. In fact, DETBAND outputs equal interval represen-
tations with interval length n for each graph in the indifference graph representation—f0
for I0 and fi,j for each graph Ii,j.
Definition 5.2. Let V1 and V2 be disjoint sets and let f1 : V1 → R and f2 : V2 → R
be two functions. The union of f1 and f2 is the function f : V1 ∪ V2 → R defined as
follows:
f(u) =
f1(u), if u ∈ V1 and
f2(u), if u ∈ V2.
Let t = ⌈4(∆ + 1) ln(2b)⌉.
DETBAND
Input: G, A.
Output: The indifference graph representation I0 ∪ Ii,j | 0 ≤ i ≤ 2 and
1 ≤ j ≤ t of G using 3t+ 1 indifference graphs.
begin
Construction of I0: for each i and for each node v ∈ Bi, f0(v) = i · n.
Construction of Ii,j, 0 ≤ i ≤ 2 and 1 ≤ j ≤ t:
for 0 ≤ i ≤ 2,
Invoke DET on each induced subgraph in H = H3r+i : r = 0, 1, . . ..
Let H1k , . . . , H
tk be the indifference graphs output by DET for Hk.
Let glk denote the equal interval representation with interval length n

Chapter 5. Cubicity and bandwidth 53
that DET produces for H lk.
Let S = V (G) − ⋃
H∈H V (H).
Let fS : S → R be defined as fS(v) = n for all v ∈ S.
for 1 ≤ j ≤ t, define fi,j as the union of fS and the functions
in gj3r+i : r = 0, 1, . . ..
end
Theorem 5.3. DETBAND constructs the cube representation of G in at most 12(∆+
1)⌈ln(2b)⌉ + 1 dimensions in polynomial time.
Proof: Let t = ⌈4(∆+1) ln(2b)⌉ and let A be v1, v2, . . . , vn. Note that if (vx, vy) ∈ E(G),
then |x− y| ≤ b since A has width b.
Claim 1. I0 is a supergraph of G.
Proof: Consider an edge (vx, vy) ∈ E(G) (assume x < y). If Bm is the block containing
vx, then vy is contained in either Bm or Bm+1 since y − x ≤ b and each block contains b
vertices. Thus, f0(vx) = mn and f0(vy) = mn ormn+n. In either case, |f0(vx)−f0(vy)| ≤n and therefore, (vx, vy) ∈ E(I0).
Claim 2. Ii,j, for 0 ≤ i ≤ 2 and 1 ≤ j ≤ t, is a supergraph of G.
Proof: Consider an edge (vx, vy) ∈ E(G) (assume x < y). Let Bm be the block that
contains vx. As we have seen earlier, vy is either in Bm or in Bm+1. We shall show that
(vx, vy) is an edge in the indifference graph Ii,j.
First, we make the following observation. If vx, vy ∈ V (Hp), where p = 3r + i for
some r ≥ 0, then by definition of fi,j, fi,j(vx) = gjp(vx) and fi,j(vy) = gj
p(vy), where gjp
is the equal interval representation with interval length n constructed by DET for the
indifference graph Hjp . Since (vx, vy) ∈ E(Hp) and E(Hp) ⊆ E(Hj
p), |gjp(vx)−gj
p(vy)| ≤ n
implying that |fi,j(vx) − fi,j(vy)| ≤ n. Therefore (vx, vy) ∈ E(Ii,j).
Now, if m = 3r + i, for some r ≥ 0, then since vx, vy ∈ Hm, it follows from the
discussion in the previous paragraph that (vx, vy) ∈ E(Ii,j).
If m = 3r + i + 1, for some r ≥ 0, then we look at the following two cases: either
vy ∈ Bm or vy ∈ Bm+1. In the first case, we have vx, vy ∈ V (Hm−1) and therefore the

Chapter 5. Cubicity and bandwidth 54
earlier argument can be applied again to obtain the result that (vx, vy) ∈ E(Ii,j). Now, if
vy ∈ Bm+1, we have vx ∈ V (Hm−1) and vy ∈ S. Since m−1 = 3r+ i, by definition of fi,j,
fi,j(vx) = gjm−1(vx). From the construction of DET, it is clear that 0 ≤ fi,j(vx) ≤ 2n.
Also, we have fi,j(vy) = fS(vy) = n. Therefore, it follows that |fi,j(vx) − fi,j(vy)| ≤ n
and therefore (vx, vy) ∈ E(Ii,j).
Similarly, if m = 3r + i + 2, for some r ≥ 0, then vx ∈ S and vy is contained either
in S or in V (Hm+1) depending on whether vy is in Bm or Bm+1. It can be shown using
arguments similar to the ones used in the preceding paragraph that (vx, vy) ∈ E(Ii,j).
This completes the proof that E(G) ⊆ E(Ii,j), for 0 ≤ i ≤ 2, 1 ≤ j ≤ t.
Claim 3. The indifference graphs Ii,j, for 0 ≤ i ≤ 2 and 1 ≤ j ≤ t, along with I0
constitute a valid indifference graph representation of G.
Proof: We have to show that given any non-edge (vx, vy) 6∈ E(G), there is at least one
graph among the 3t + 1 indifference graphs generated by DETBAND that does not
contain the edge (vx, vy).
Assume that x < y. Let Bm and Bl be the blocks containing vx and vy respectively.
If l − m > 1 then f0(vy) − f0(vx) = (l − m)n > n. Therefore, (vx, vy) 6∈ E(I0). Now
we consider the case when l − m ≤ 1. Consider the set of indifference graphs I =
Hjm | 1 ≤ j ≤ t that is generated by DET when given Hm as input. We know that
(vx, vy) 6∈ E(Hm) because Hm is an induced subgraph of G containing the vertices vx and
vy. Since I is a valid indifference graph representation of Hm, at least one of the graphs
in I, say Hpm, should not contain the edge (vx, vy). Recall that we denote by gp
m be the
equal interval representation with interval length n for Hpm that is constructed by DET.
Since (vx, vy) 6∈ E(Hpm), |gp
m(vx) − gpm(vy)| > n. Let i = m mod 3. Thus, m = 3r + i,
for some r ≥ 0. Now, since fi,p is defined as the union of all the functions in the set
fS∪ gp3r+i : r = 0, 1, 2, . . . which contains gp
m, fi,p(vx) = gpm(vx) and fi,p(vy) = gp
m(vy)
which implies that |fi,p(vx) − fi,p(vy)| > n. Therefore, (vx, vy) 6∈ E(Ii,p).
Thus, DETBAND generates a valid indifference graph representation of G using at

Chapter 5. Cubicity and bandwidth 55
most 3t + 1 ≤ 12(∆ + 1)⌈ln(2b)⌉ + 1 indifference graphs. Since DET runs in polyno-
mial time and there are only polynomial number of invocations of DET, the procedure
DETBAND runs in polynomial time.
Tightness of the bound: Consider the case when G is a complete binary tree of
height d = log n. Using the results shown in [14], we can see that cub(G) ≥ dlog 2d
=
log nc1+log log n
where c1 is a constant. Therefore, cub(G) = Ω( log nlog log n
). Since the bandwidth
of the complete binary tree on n vertices is Θ( nlog n
) as shown in [36], our O(∆ ln b) bound
on cubicity is tight up to a factor of O(log log n).
5.2 Cube representation in b + 1 dimensions
We shall now show that given a linear ordering of the vertices of G with width b, we can
construct an indifference graph representation of G using b+ 1 indifference graphs.
Theorem 5.4. If G is any graph with bandwidth b, then cub(G) ≤ b+ 1.
Proof: Let n denote |V (G)| and let A = u0, u1, . . . , un−1 be a linear ordering of the
vertices of G with width b. It is obvious that n > b. Since A has width b, if (uj, uk) ∈E(G), then |j − k| ≤ b. For two vertices uj, uk ∈ V (G), we will abuse notation to say
that uj < uk if j < k and uj > uk if j > k. The relations ≤ and ≥ on V (G) are also
defined similarly.
We construct b+ 1 indifference graphs I0, I1, . . . , Ib−1 and H, such that G = I0 ∩ I1 ∩· · · ∩ Ib−1 ∩H.
Construction of indifference graph H:
The vertex set of H is V (G) and let its edge set be denoted by E(H). Since H
has to be a supergraph of G, we have to make sure that every edge in E(G) has to
be present in E(H). b being the width of the linear ordering A of vertices taken, a
vertex uj is not adjacent in G to any vertex uk when |j − k| > b. Let the function
h : V (G) → R be the equal interval representation for H with interval length b, i.e., for
uj, uk ∈ V (G), (uj, uk) ∈ E(H) ⇔ |h(uj) − h(uk)| ≤ b. We construct h in such a way

Chapter 5. Cubicity and bandwidth 56
that E(H) = (uj, uk) | |j − k| < b ∪ (uj, uk) | |j − k| = b and (uj, uk) ∈ E(G). h is
defined as:
Let ǫ = 1/n2.
h(uj) =
j, for j < b,
h(uj−b) + b, for j ≥ b and (uj−b, uj) ∈ E(G),
h(uj−b) + b+ ǫ, for j ≥ b and (uj−b, uj) 6∈ E(G).
Note that for a vertex uj,
h(uj) ≤ h(uj−b) + b+ ǫ
≤ h(uj−2b) + 2b+ 2ǫ ≤ · · · ≤ h(uj mod b) + ⌊j/b⌋b+ ⌊j/b⌋ǫ
= j mod b+ ⌊j/b⌋b+ ⌊j/b⌋ǫ
= j + ⌊j/b⌋ǫ
≤ j + nǫ = j + 1/n
Claim 4. H is a supergraph of G.
Proof: First we observe that for any vertex uj, j ≤ h(uj) ≤ j + 1/n. Now, consider
an edge (uj, uk) of G where j < k. Since the width of the input linear ordering A is
b, we have k − j ≤ b. Now we consider the following two cases. If k − j ≤ b − 1
then h(uk) − h(uj) ≤ k + 1/n − j ≤ b − 1 + 1/n < b. Since |h(uk) − h(uj)| ≤ b, it
follows that (uj, uk) ∈ E(H). If k − j = b then from the definition of h, it follows that
h(uk) = h(uk−b) + b = h(uj) + b. Thus h(uk)− h(uj) = b implying that (uj, uk) ∈ E(H).
Every edge in G is therefore present in H, or in other words, H is a supergraph of G.
Construction of Ii, for 0 ≤ i ≤ b− 1 :
The vertex set of the indifference graph Ii is V (G) and let E(Ii) denote the edge
set of Ii. Ii is constructed as follows. Let v0, v1, . . . , vk−1 be a subsequence of A of
k vertices such that v0 = ui, v1 = ui+b, v2 = ui+2b, . . . , vj = ui+jb and so on where

Chapter 5. Cubicity and bandwidth 57
k = ⌈n−ib⌉. We define vk as a dummy vertex with the property that ∀u ∈ V (G), u < vk.
We now define fi, the equal interval representation for Ii with interval length 2, as follows:
fi(u) = 1, if u < ui
If u be a vertex such that u ≥ ui:
fi(u) = t, if u = vt
= t+ 2, if vt < u < vt+1 and (u, vt) ∈ E(G)
= t+ 3, if vt < u < vt+1 and (u, vt) 6∈ E(G)
Claim 5. Ii for 0 ≤ i ≤ b− 1 is a supergraph of G.
Proof: Consider the indifference graph Ii. Let (x, y) be any edge in E(G). We assume
without loss of generality that x < y.
Case x < ui = v0: Then y < ui+b = v1. Thus, fi(x) = 1 and 0 ≤ fi(y) ≤ 3. Therefore,
|fi(x) − fi(y)| ≤ 2 which implies that (x, y) ∈ E(Ii) (since fi is an equal interval repre-
sentation with interval length 2 for Ii).
Case x = vt for some t ≤ k − 1: Then y ≤ vt+1, therefore fi(x) = t and fi(y) = t + 1
(if y = vt+1) or t + 2 (if y < vt+1). In either case, |fi(x) − fi(y)| ≤ 2 and therefore,
(x, y) ∈ E(Ii).
Case vt < x < vt+1 for some t ≤ k − 1: Then y < vt+2. Therefore, fi(x) can take
values in t+ 2, t+ 3 while fi(y) can take values in t+ 1, t+ 2, t+ 3, t+ 4. Therefore,
|fi(x) − fi(y)| ≤ 2, which implies that (x, y) ∈ E(Ii).
Since all the cases have been considered, it follows that any edge in E(G) is also an
edge in E(Ii).
It remains to show that G = I0 ∩ · · · ∩ Ib−1 ∩H. To do this, it suffices to show that
any (x, y) /∈ E(G) is not present in at least one of the indifference graphs I0, . . . , Ib−1, H.
Let x = uj and y = uk and we will assume without loss of generality that j < k (i.e.

Chapter 5. Cubicity and bandwidth 58
x < y). Consider the case k − j ≥ b. In this case, we claim that (x, y) /∈ E(H). This is
because of the following. If k − j = b then clearly h(x) − h(y) = h(uk) − h(uj) = b + ǫ
and thus (x, y) /∈ E(H) (recall that h is an equal interval representation with interval
length b). Now, if k − j ≥ b + 1 then h(uk) − h(uj) ≥ k − j − 1/n ≥ (b + 1) − 1/n > b
(since h(uk) ≥ k and h(uj) ≤ j + 1/n). Thus (uj, uk) /∈ E(H). Now the remaining case
is k− j < b. Consider the graph Il where l = j mod b. Let t = ⌊j/b⌋ and let vr = ul+rb,
for r = 0, 1, 2, . . .. Then vt = uj. Since k − j < b, uk < vt+1. Thus we have fl(uj) = t
and fl(uk) = t+ 3. Thus, |fl(uj) − fl(uk)| > 2 and hence (uj, uk) /∈ E(Il) as required.
Thus I0, . . . , Ib−1, H is a valid indifference graph representation of G using b + 1
indifference graphs which establishes that cub(G) ≤ b+ 1.
Tightness of the bound: Though the bound of cub(G) ≤ bw(G) + 1 might seem far
from being tight for many graphs such as complete graphs, there are several graphs for
which the bound becomes almost tight. For example, the bandwidth and cubicity of
paths are both equal to 1 and for cycles, the bandwidth and cubicity are both equal to
2—our bound is thus tight but for an additive constant of 1. A Roberts’ graph is the
graph obtained by removing a perfect matching from a complete graph. It can be seen
from the results given in [51] that the cubicity of a Roberts’ graph on n vertices is n/2.
The bandwidth of the Roberts’ graph can be seen to be n − 2 upon observation. Thus
our bound is tight upto a factor of 2 for Roberts’ graphs.
The algorithm:
Our algorithm to compute the cube representation of G in b+1 dimensions given a linear
ordering of the vertices of G with width b constructs the indifference supergraphs of G,
namely, I0, . . . , Ib−1, H using the constructive procedure used in the proof of Theorem
5.4. It is easy to verify that this algorithm runs in O(b · n) time where b is the width of
the input linear arrangement and n is the number of vertices in G.
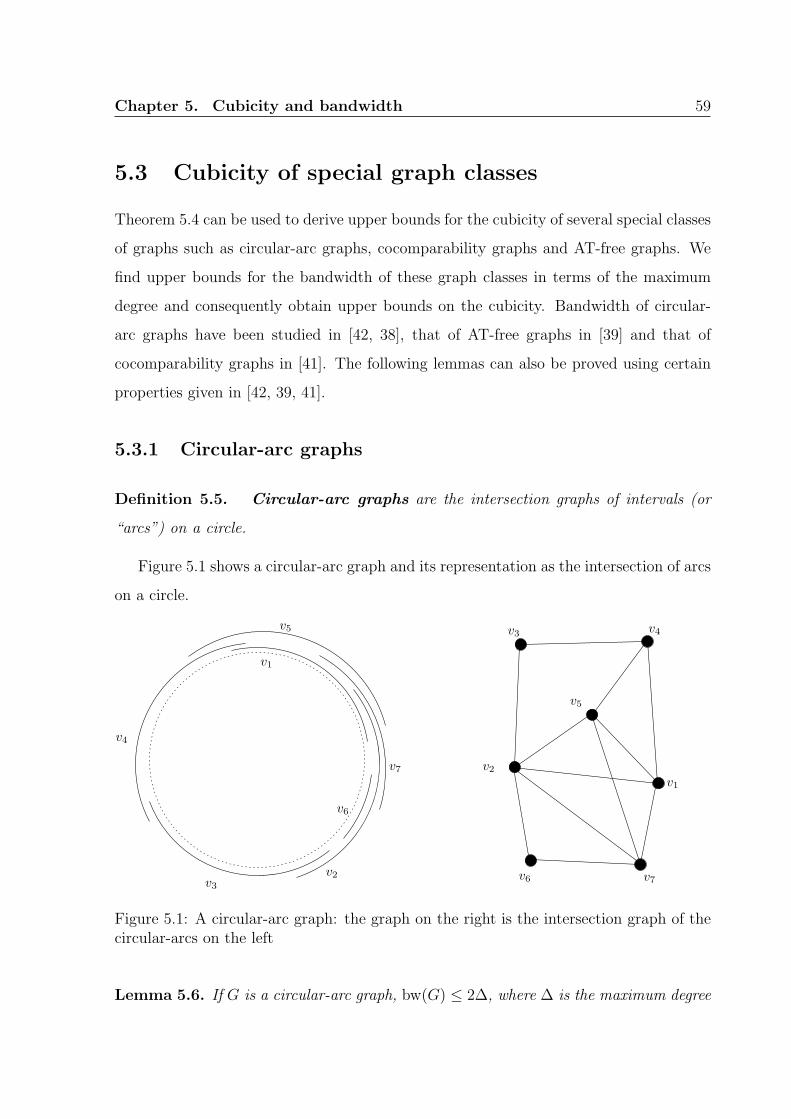
Chapter 5. Cubicity and bandwidth 59
5.3 Cubicity of special graph classes
Theorem 5.4 can be used to derive upper bounds for the cubicity of several special classes
of graphs such as circular-arc graphs, cocomparability graphs and AT-free graphs. We
find upper bounds for the bandwidth of these graph classes in terms of the maximum
degree and consequently obtain upper bounds on the cubicity. Bandwidth of circular-
arc graphs have been studied in [42, 38], that of AT-free graphs in [39] and that of
cocomparability graphs in [41]. The following lemmas can also be proved using certain
properties given in [42, 39, 41].
5.3.1 Circular-arc graphs
Definition 5.5. Circular-arc graphs are the intersection graphs of intervals (or
“arcs”) on a circle.
Figure 5.1 shows a circular-arc graph and its representation as the intersection of arcs
on a circle.
v1
v5
v7
v2
v3
v4
v6
v1
v2
v3v4
v5
v6 v7
Figure 5.1: A circular-arc graph: the graph on the right is the intersection graph of thecircular-arcs on the left
Lemma 5.6. If G is a circular-arc graph, bw(G) ≤ 2∆, where ∆ is the maximum degree

Chapter 5. Cubicity and bandwidth 60
of G.
Proof: Let an arc on a circle corresponding to a vertex u be denoted by [h(u), t(u)]
where h(u)(called the head of the arc) is the starting point of the arc when the circle is
traversed in the clockwise order and t(u) (called the tail of the arc) is the ending point
of the arc when traversed in the clockwise order. We assume without loss of generality
that the end-points of all the arcs are distinct and that no arc covers the whole circle.
If any of these cases occur, the end-points of the arcs can be shifted slightly so that our
assumption holds true.
Choose a vertex v1 ∈ V (G). Start from h(v1) and traverse the circle in the clockwise
order. We order the vertices of the graph (other than v1) as v2, . . . , vn in the order in
which the heads of their corresponding arcs are encountered during this traversal. Now,
we define an ordering f : V (G) → 1, . . . , n of the vertices of G as follows:
f(vj) = 2j, if 1 ≤ j ≤ ⌊n/2⌋.f(vj) = 2(n− j) + 1, if ⌊n/2⌋ < j ≤ n.
We now prove that the width of this ordering is at most 2∆.
We claim that if h(vj) and h(vk) are two consecutive heads encountered during a
clockwise traversal of the circle, |f(vj) − f(vk)| ≤ 2. To see this, we will consider the
different cases that can occur:
Case 1. When 1 ≤ j < j + 1 = k ≤ ⌊n/2⌋. Here, f(vj) = 2j and f(vk) = 2(j + 1).
Therefore, |f(vj) − f(vk)| = 2.
Case 2. When ⌊n/2⌋ < j < j + 1 = k ≤ n. In this case, f(vj) = 2(n − j) + 1 and
f(vk) = 2(n− (j + 1)) + 1, which means that |f(vj) − f(vk)| = 2.
Case 3. When j = ⌊n/2⌋ < j + 1 = k,
Case 3.1. If n is even. f(vj) = 2j = n and f(vk)= 2(n− (j + 1)) + 1
= 2n− 2j − 1 = n− 1.
Case 3.2. If n is odd, f(vj) = 2j = n− 1 and f(vk) = 2n− 2j − 1 = n.
In both these cases, |f(vj) − f(vk)| = 1.
Case 4. When j = n and k = 1. We then have f(vj) = 1 and f(vk) = 2. Therefore,
|f(vj) − f(vk)| = 1.

Chapter 5. Cubicity and bandwidth 61
Now, consider any edge (vj, vk) ∈ E(G). Assume without loss of generality that
h(vj) occurs first when we traverse the circle in clockwise direction starting from h(v1).
Now, if we traverse the arc corresponding to vj from h(vj) to t(vj), we will encounter
at most ∆ − 1 heads h(u1), h(u2), . . . , h(u∆−1) before we reach h(vk) since vj can be
connected to at most ∆ vertices in G. We already know that |f(vj) − f(u1)| ≤ 2 and
|f(ui) − f(ui+1)| ≤ 2, for 1 ≤ i ≤ ∆ − 2. Also, |f(u∆−1 − f(vk)| ≤ 2. It follows that
|f(vj) − f(vk)| ≤ 2∆. Thus f is an ordering of the vertices of G with width at most 2∆
and therefore we have bw(G) ≤ 2∆.
Corollary 5.7. If G is a circular-arc graph with maximum degree ∆, then cub(G) ≤2∆ + 1.
Proof: Follows from Theorem 5.4 and Lemma 5.6.
5.3.2 Cocomparability graphs
Definition 5.8. Comparability graphs are graphs that have a transitive orientation.
That is, the edges of such a graph G can be oriented to obtain a directed graph
~G so that if there is a directed path from u to v in ~G then the directed edge (u, v) is
present in ~G. As an exercise, it is instructive to verify that Cn (a cycle on n vertices) is
a comparability graph if and only if n is even.
Definition 5.9. Cocomparability graphs are graphs whose complements are com-
parability graphs.
Lemma 5.10. If G is a cocomparability graph, then bw(G) ≤ 2∆ − 1, where ∆ is the
maximum degree of G.
Proof: Let |V (G)| = n. Since G is a comparability graph, there exists a partial order ≺in G on the node set V (G) such that (u, v) ∈ E(G) if and only if u ≺ v or v ≺ u. This

Chapter 5. Cubicity and bandwidth 62
partial order gives a direction to the edges in E(G). We can run a topological sort on
this partial order to produce a linear ordering of the vertices, say, f : V (G) → 1, . . . , n.
The topological sort ensures that if u ≺ v, then f(u) < f(v). Now, let (u, v) ∈ E(G) and
let w be a vertex such that f(u) < f(w) < f(v). We will show that w is adjacent to either
u or v in G. Suppose not. Then (u,w), (w, v) ∈ E(G) and therefore u ≺ w and w ≺ v.
Now, by transitivity of ≺, this implies that u ≺ v, which means that (u, v) ∈ E(G)—a
contradiction. Therefore, any vertex w such that f(u) < f(w) < f(v) in the ordering f
is adjacent to either u or v. Since the maximum degree of G is ∆, there can be at most
2∆ − 2 vertices between with f(·) value between f(u) and f(v). Thus, the width of the
ordering given by f is at most 2∆ − 1 and therefore, bw(G) ≤ 2∆ − 1.
Corollary 5.11. If G is a cocomparability graph with maximum degree ∆, then
cub(G) ≤ 2∆.
Proof: Follows from Theorem 5.4 and Lemma 5.10.
5.3.3 AT-free graphs
AT-free graphs were defined in Section 1.2 (see Definition 1.6). A caterpillar is a tree
such that a path (called the spine) is obtained by removing all its leaves (see Figure 5.2).
In the proof of Theorem 3.16 of [39], Kloks et al. show that every connected AT-free
Figure 5.2: An example of a caterpillar: the white vertices indicate the spine

Chapter 5. Cubicity and bandwidth 63
graph G has a spanning caterpillar subgraph T , such that adjacent nodes in G are at a
distance at most four in T . Moreover, for any edge (u, v) ∈ E(G) such that u and v are
at distance exactly four in T , both u and v are leaves of T . Let p1, . . . , pk be the nodes
along the spine of G.
Lemma 5.12. If G is an AT-free graph, bw(G) ≤ 3∆ − 2, where ∆ is the maximum
degree of G.
Proof: Let Li denote the set of leaves of T adjacent to pi. Clearly, |Li| ≤ ∆ and
Li ∩ Lj = ∅ for i 6= j. For any set S of vertices, let 〈S〉 denote an arbitrary ordering of
the vertices in set S. Let 〈u〉 denote ordering with just one vertex u in it. If α = u1, . . . , us
and β = v1, . . . , vt are two orderings of vertices in G, then let α ⋄ β denote the ordering
u1, . . . , us, v1, . . . , vt. Let A = 〈L1〉⋄〈p1〉⋄〈L2〉⋄〈p2〉⋄ · · ·⋄〈Lk〉⋄〈pk〉 be a linear ordering
of the vertices of G. One can use the property of T stated in the previous paragraph to
easily show that A is a linear ordering of the vertices of G with width at most 3∆ − 2.
Therefore, bw(G) ≤ 3∆ − 2.
Corollary 5.13. If G is an AT-free graph with maximum degree ∆, then cub(G) ≤3∆ − 1.
Proof: Follows from Theorem 5.4 and Lemma 5.12.
5.4 A summary of results
The upper bounds for cubicity we have presented so far are summarized in the following
table:

Chapter 5. Cubicity and bandwidth 64
Graph class Upper bound for cubicity
Any graph 12(∆ + 1)⌈ln(2b)⌉ + 1
Any graph ⌈4(∆ + 1) lnn⌉Any graph b + 1
AT-free graphs 3∆ − 1
Interval graphs ∆ + 1
Circular arc graphs 2∆ + 1
Cocomparability graphs 2∆
Note that AT-free graphs include well-known graph classes like interval graphs, per-
mutation graphs and trapezoidal graphs. It is well known that interval graphs have
bandwidth at most ∆ and hence the upper bound for interval graphs. However, this
bound is far from being tight as we see in the next chapter.

Chapter 6
Cubicity of interval graphs
Interval graphs are a very well studied class of graphs not just because of their well-
defined structure but also because of their usefulness in a wide variety of applications
ranging from DNA analysis to process scheduling. Since interval graphs have boxicity
at most 1, the result in [15] gives us an upper bound of ⌈log2 n⌉ for the cubicity of any
interval graph on n vertices. Theorem 5.4 gives us an upper bound of ∆ + 1 for any
interval graph with maximum degree ∆. We now show that the special structure of these
graphs can be exploited to show that a much tigher upper bound exists for their cubicity
when compared to either of these bounds.
We prove constructively that for any interval graph I on n vertices with maximum
degree ∆, cub(I) ≤ ⌈log2 ∆⌉ + 4. More specifically, an indifference graph representation
of I is constructed using ⌈log2 ∆⌉ + 4 indifference graphs.
6.1 A few results that we need
Two lemmas that we need for the proof follow.
Lemma 6.1. For an interval graph I, there exists an interval representation such that
the intervals assigned to no two vertices have the same left end-point.
Proof: Consider an interval representation of I and let l(u) and r(u) denote the left and
right end-points of the interval assigned to vertex u by this interval representation. We
65

Chapter 6. Cubicity of interval graphs 66
construct a new interval representation of I by mapping each vertex u to a new interval
[l′(u), r(u)] such that l′(u) 6= l′(v) for any two vertices u and v. We define l′(u) as follows.
Let P = x ∈ R | ∃u ∈ V such that l(u) = x or r(u) = x. Let ǫ = 1n+1
minx,y∈P|x−y|.
Let v1, . . . , vn be an ordering of the vertices of I such that if i < j then l(vi) ≤ l(vj)
(resolving ties arbitrarily). For a vertex vi, define l′(vi) = l(vi) − (n+ 1 − i)ǫ. It is easy
to verify that for any two vertices vi and vj, l′(vi) 6= l′(vj). In the following we show that
mapping each vertex vi to [l′(vi), r(vi)] yields a valid interval representation of I. Clearly
for any vertex vi, l′(vi) ≤ r(vi). Consider any two vertices vi and vj and let i < j.
Recalling the ordering, we know that l(vi) ≤ l(vj) since i < j. It is easy to see that
(vi, vj) is an edge in I if and only if r(vi) ≥ l(vj). It is easy to verify that under the new
mapping, l′(vi) ≤ l′(vj). Moreover, r(vi) ≥ l′(vj) if and only if r(vi) ≥ l(vj). It follows
that for vi and vj, their corresponding new intervals [l′(vi), r(vi)] and [l′(vj), r(vj)] have
a non-empty intersection if and only if their corresponding original intervals [l(vi), r(vi)]
and [l(vj), r(vj)] have a non-empty intersection.
A construction to obtain the indifference graph representation of any interval graph
on n vertices using ⌈log2 n⌉ indifference graphs was given in [15]. We state the lemma and
describe in brief the construction involved because we use the result and the underlying
construction to prove the main result in this chapter.
Lemma 6.2 (Chandran and K. A. Mathew [15]). If G is an interval graph on n
vertices, cub(G) ≤ ⌈log2 n⌉.The construction in [15]: The proof of this lemma gives an indifference graph rep-
resentation of G using k = ⌈log2 n⌉ indifference graphs I1, . . . , Ik. The construction of
each Ii, 1 ≤ i ≤ k involves partitioning the vertex set into two sets Ai and Bi. For
each Ii, its equal interval representation with interval length n (recall Definition 1.16) is
specified by a function hi : V → [0, 2n] in such a way that hi(u) ∈ [0, n] for all u ∈ Ai
and hi(u) ∈ [n + 1, 2n] for all u ∈ Bi. We can assume the existence of fi : V → [0, 2], a
unit interval representation of Ii. (As noted in Section 1.3, the function fi : V → [0, 2]
such that fi(u) = hi(u)/n is a unit interval representation of Ii.)

Chapter 6. Cubicity of interval graphs 67
6.2 The proof
Let I(V,E) be an interval graph on n vertices with maximum degree ∆. We assume
n ≥ 2 and ∆ ≥ 2 as the remaining cases are trivial. Consider an interval representation
of I which assigns the interval [l(u), r(u)] to each vertex u ∈ V (G). By Lemma 6.1 we can
assume that this given interval representation of I is such that l(u) 6= l(v) for all u, v ∈V (I) where u 6= v.
Below we state a useful property of interval graphs.
Lemma 6.3. Let (u, v) ∈ E(I) such that l(u) < l(v) and let S = w | l(u) < l(w) <
l(v). Then d(u) ≥ |S| + 1.
Proof: This is so because we have r(u) ≥ l(v) since (u, v) ∈ E(I) and therefore
l(w) ∈ [l(u), r(u)] for each w ∈ S. Thus u is adjacent to all the vertices in S (in addition
to v).
6.2.1 Grouping the vertices
Let v1, v2, . . . , vn be an ordering of the vertices of I such that if i < j, then l(vi) < l(vj).
Now, we group the vertices into disjoint blocks B1, B2, . . . , Bk where k = ⌈n/(2∆)⌉. Each
block except possibly the last consists of 2∆ vertices. That is, Bi = v2(i−1)∆+1 . . . , v2i∆for 1 ≤ i ≤ k − 1 and Bk = v2(k−1)∆+1, . . . , vn. Let the block number of a vertex u,
denoted as b(u), be defined as follows. For 1 ≤ i ≤ k and for all u ∈ Bi, define b(u) = i.
For 1 ≤ i ≤ k − 1, let the block Bi be partitioned into two parts Xi and Yi where
Xi = u ∈ Bi | N(u) ∩Bi+1 = ∅ and Yi = Bi −Xi
Let Xk = Bk and Yk = ∅.
Lemma 6.4. Let (u, v) ∈ E(I) such that l(u) < l(v). If b(u) 6= b(v) then u ∈ Yb(u) and
v ∈ Xb(u)+1.
Proof: Suppose b(u) 6= b(v). First we show that b(v) = b(u) + 1. In other words, we

Chapter 6. Cubicity of interval graphs 68
show that v ∈ Bb(u)+1. Clearly b(v) > b(u) since l(v) > l(u) and b(u) 6= b(v). Assume for
the sake of contradiction that b(v) > b(u) + 1. It follows that for all w ∈ Bb(u)+1, l(u) <
l(w) < l(v). By Lemma 6.3, it implies that d(u) ≥ |Bb(u)+1| + 1. Since b(v) > b(u) + 1,
we have b(u) + 1 ≤ k− 1 and hence |Bb(u)+1| = 2∆. It follows that d(u) ≥ 2∆ + 1 which
contradicts the fact the ∆ is the maximum degree of I.
Now it is easy to see from the definition of Yb(u) that u ∈ Yb(u) since v ∈ Bb(u)+1 and
v ∈ N(u).
It remains to be shown that v ∈ Xb(u)+1. If b(u) + 1 = k, then we are done. Let
b(u) + 1 = t < k. Let Bt be partitioned as Zt and Z ′t where
Zt = v2(t−1)∆+1, . . . , v2(t−1)∆+∆ and Z ′t = Bt − Zt
Recalling that |Bt| = 2∆, we have |Zt| = |Z ′t| = ∆. First we note that v ∈ Zt. This
is because, if v ∈ Z ′t then for all w ∈ Zt, l(u) < l(w) < l(v). This would imply that
d(u) ≥ ∆+1 by Lemma 6.3, which is a contradiction. Now we show that N(v)∩Bt+1 = ∅.
This is because, if say p ∈ N(v) ∩ Bt+1 then clearly for all w ∈ Z ′t, l(v) < l(w) < l(p).
This would imply by Lemma 6.3 that d(v) ≥ ∆ + 1, which is a contradiction. Thus we
have v ∈ Xt.
Corollary 6.5. Let (u, v) ∈ E(I) such that l(u) < l(v). If u ∈ Xb(u) then b(u) = b(v).
Lemma 6.6. Let u and v be two vertices of I such that b(u) = b(v) = b. If (u, v) /∈ E(I)
then either u ∈ Xb or v ∈ Xb.
Proof: If b = k, then the theorem is trivially true as Xk = Bk. Therefore, we consider
the case when b < k. Assume for the sake of contradiction that u, v ∈ Yb. From the
definition of set Yb, we have N(u)∩Bb+1 6= ∅ and N(v)∩Bb+1 6= ∅. Let u′ ∈ N(u)∩Bb+1
and let v′ ∈ N(v) ∩ Bb+1. Let w ∈ V such that l(w) = minx∈Bb+1l(x). It follows that
l(u) ≤ l(w) ≤ l(u′) and l(v) ≤ l(w) ≤ l(v′). Since (u, u′), (v, v′) ∈ E(I), we also have
l(u′) ≤ r(u) and l(v′) ≤ r(v). It follows that l(w) ∈ [l(u), r(u)] and l(w) ∈ [l(v), r(v)]. In

Chapter 6. Cubicity of interval graphs 69
other words, the intervals corresponding to u and v have non-empty intersection, which
contradicts the fact that (u, v) /∈ E(I). Thus, either u ∈ Xb or v ∈ Xb.
6.2.2 Constructing the indifference graph representation
Let t = ⌈log2(2∆)⌉ = ⌈log2(∆)⌉ + 1. We now construct t + 3 indifference graphs
H1, H2, . . . , Ht, H′0, H
′1 and H ′
2 such that
I = H ′0 ∩H ′
1 ∩H ′2 ∩
t⋂
i=1
Hi.
Let us define these indifference graphs by giving their unit interval representations.
Let Ij, for 1 ≤ j ≤ k, denote the subgraph induced by Xj on I. Clearly, Ij is an
interval graph on at most 2∆ vertices. Also, Ij is not empty as Xj is not empty for
any j. This is because it follows from Lemma 6.6 that Yj induces a clique in I. Now,
for j < k, if Xj = ∅, then |Yj| = 2∆. Thus Yj induces a clique of size 2∆ in I
which is an obvious contradiction to the fact that ∆ is the maximum degree in I. If
j = k, Xj = Bj by definition and hence not empty. Now, from Lemma 6.2, we have
cub(Ij) ≤ ⌈log2(2∆)⌉ = t. This means that Ij can be represented as the intersection of
t indifference graphs, say, Ij1 , Ij
2 , . . . , Ijt . From the construction described in Section 6.1,
it follows that there is a unit interval representation of Iji given by f j
i : Xj → [0, 2].
Construction of indifference graphs H1, . . . , Ht:
We define the unit interval representation of Hi, for 1 ≤ i ≤ t by the function gi : V →[0, 2] as follows: Let u be a vertex of I. Let b = b(u). That is u belongs to the block Bb.
For 1 ≤ i ≤ t:
gi(u) = f bi (u) if u ∈ Xb and gi(u) = 1 if u ∈ Yb
Recalling the definition of f bi (), it follows that gi(u) ∈ [0, 2] for any vertex u.
Lemma 6.7. For i ∈ 1, . . . , t, Hi is a supergraph of I.

Chapter 6. Cubicity of interval graphs 70
Proof: Consider Hi for i ∈ 1, . . . , t. Let (u, v) ∈ E(I) such that l(u) < l(v). We show
that (u, v) ∈ E(Hi). If u ∈ Yb(u), then by definition of gi, gi(u) = 1. Since gi(v) lies in
[0, 2], we have |gi(u) − gi(v)| ≤ 1 and therefore (u, v) ∈ E(Hi). By similar reasoning,
it follows that if v ∈ Yb(v) then (u, v) ∈ E(Hi). The only remaining case is that both
u ∈ Xb(u) and v ∈ Xb(v). From corollary 6.5, we have b(u) = b(v) = b. That is, u ∈ Xb
and v ∈ Xb. Hence u, v ∈ V (Ib). Since (u, v) ∈ E(I) and hence (u, v) ∈ E(Ib), the edge
(u, v) is present in all the indifference graphs Ib1, Ib
2, . . . , Ibt . In particular, (u, v) ∈ E(Ib
i ).
Thus, we have, |f bi (u)−f b
i (v)| ≤ 1. Now, from the definition of gi, we have gi(u) = f bi (u)
and gi(v) = f bi (v). Thus, |gi(u) − gi(v)| ≤ 1 implying that (u, v) ∈ Hi.
Lemma 6.8. Let (u, v) 6∈ E(I) such that u, v ∈ Xl where l = b(u) = b(v). Then
(u, v) 6∈ E(⋂t
i=1Hi).
Proof: Clearly u and v are vertices in the induced subgraph I l induced by Xl on I. Since
(u, v) /∈ E(I), we have (u, v) /∈ E(I l). Recalling that⋂t
i=1 I li is an indifference graph
representation of I l, it follows that there exists a j ∈ 1, . . . , t such that (u, v) /∈ E(I lj).
In other words, the unit intervals corresponding to u and v in I lj, given by f l
j(u) and
f lj(v), are such that |f l
j(u) − f lj(v)| > 1. We now show that (u, v) /∈ Hj, implying that
(u, v) /∈ E(⋂t
i=1Hi). To see this, first recall that u, v ∈ Xl. Hence, in the unit interval
representation of Hj, the intervals corresponding to u and v, given by gj(u) and gj(v), are
such that gj(u) = f lj(u) and gj(v) = f l
j(v), by definition. It follows that |gj(u)−gj(v)| > 1
implying that (u, v) /∈ Hj.
Construction of H ′0 and H ′
1:
For i ∈ 0, 1, let g′i : V → R specify the unit interval representation of H ′i.
Consider a vertex u ∈ V . Let b = b(u) be the block to which u belongs. Define
S(u) as S(u) = Xb if u ∈ Xb and S(u) = Yb otherwise. (Either u ∈ Xb or u ∈ Yb.) Let
p(u) = |x ∈ S(u) | l(x) ≤ l(u)|. Let ǫ = 1/n.
Define g′0 as follows:

Chapter 6. Cubicity of interval graphs 71
g′0(u) = b+ ǫ · p(u) if u ∈ Yb
g′0(u) = b− 1 if u ∈ Xb and Yb ∩N(u) = ∅g′0(u) = b− 1 + ǫ · p(nu) if u ∈ Xb and Yb ∩N(u) 6= ∅, where
p(nu) = maxx∈Yb∩N(u)p(x)Similarly, define g′1 as:
g′1(u) = b+ ǫ · p(u) if u ∈ Xb
g′1(u) = b+ ǫ · p(nu) if u ∈ Yb, where p(nu) = maxx∈Xb+1∩N(u)p(x).
(Note that if u ∈ Yb, then Xb+1 ∩N(u) 6= ∅).
Lemma 6.9. H ′0 and H ′
1 are supergraphs of I.
Proof: Let (u, v) ∈ E(I) such that l(u) < l(v). We show that (u, v) ∈ E(H ′0) and
(u, v) ∈ E(H ′1) by proving that |g′0(u) − g′0(v)| ≤ 1 and |g′1(u) − g′1(v)| ≤ 1. Note that
b(u) ≤ b(v) since l(u) < l(v).
Case b(u) = b(v) = b where either u, v ∈ Xb or u, v ∈ Yb:
It is straightforward to verify from the definition of g′0 that |g′0(u) − g′0(v)| ≤ 1 (by
observing that 0 < ǫ · p(w) ≤ 1 for any w ∈ V ).
Case b(u) = b(v) = b where either u ∈ Xb and v ∈ Yb or u ∈ Yb and v ∈ Xb:
If u ∈ Xb and v ∈ Yb then by noting that g′0(u) = b(u)−1+ǫ·p(nu) and p(v) ≤ p(nu), it
follows that |g′0(u)−g′0(v)| ≤ 1. The symmetric case u ∈ Yb and v ∈ Xb follows similarly.
Case b(u) 6= b(v) :
In this case, by Lemma 6.4 we have b(v) = b(u) + 1 with u ∈ Yb(u) and v ∈ Xb(u)+1.
Now, by noting that b(u) ≤ g′0(u) ≤ b(u) + 1 and b(u) ≤ g′0(v) ≤ b(u) + 1, it follows that
|g′0(u) − g′0(v)| ≤ 1.
Using similar arguments, it is straightforward to show that |g′1(u)−g′1(v)| ≤ 1 for the
above three cases. Thus, H ′0 and H ′
1 are supergraphs of I.
Lemma 6.10. Let u and v be two vertices of I such that b(u) = b(v) and v ∈ Yb(v). If
(u, v) 6∈ E(I) then (u, v) 6∈ E(H ′0).

Chapter 6. Cubicity of interval graphs 72
Proof: Let b(u) = b(v) = b. Since v ∈ Yb, we have b < k. From Lemma 6.6 we have
u ∈ Xb. In the following, we show that |g′0(u) − g′0(v)| > 1, which would imply that
(u, v) /∈ E(H ′0). Since v ∈ Yb, we have g′0(v) = b+ ǫ · p(v). Since u ∈ Xb, if Yb ∩N(u) = ∅
then it is easy to verify that |g′0(u) − g′0(v)| > 1, and thus (u, v) /∈ E(H ′0).
Consider the remaining case Yb ∩ N(u) 6= ∅. Recall that nu ∈ Yb ∩ N(u) such that
p(nu) = maxx∈Yb∩N(u)p(x). We first show that p(v) > p(nu) as follows. Recalling that
u ∈ Xb and v ∈ Yb, we have N(u) ∩ Bb+1 = ∅ and N(v) ∩ Bb+1 6= ∅. It easily follows
that r(v) > r(u) because for any w ∈ N(v) ∩ Bb+1, r(v) ≥ l(w) and r(u) < l(w) (since
N(u)∩Bb+1 = ∅). Since r(v) > r(u) and (u, v) /∈ E(I), it follows that l(u) < l(v). Since
nu ∈ N(u) we also have r(u) ≥ l(nu). If l(v) ≤ l(nu), we would obtain that l(u) < l(v) ≤l(nu) ≤ r(u), which would imply that (u, v) ∈ E(I), which is a contradiction. Hence
it follows that l(v) > l(nu). Since v, nu ∈ Yb, it follows from the definition of p(·) that
p(v) > p(nu). Recalling that g′0(u) = b− 1 + ǫ · p(nu) and g′0(v) = b + ǫ · p(v), it follows
that |g′0(v) − g′0(u)| = |1 + ǫ · (p(v) − p(m))| > 1. Therefore, (u, v) 6∈ E(H ′0).
Lemma 6.11. Let u and v are two vertices of I such that b(v) = b(u) + 1, u ∈ Yb(u) and
v ∈ Xb(v). If (u, v) 6∈ E(I) then (u, v) 6∈ E(H ′1).
Proof: We have l(u) < l(v) since b(v) = b(u) + 1. Let b(u) = b and b(v) = b + 1. We
show that (u, v) /∈ E(H ′1) by showing that |g′1(u) − g′1(v)| > 1. If Xb+1 ∩N(u) = ∅, from
the definition of g′1, it is straightforward to verify that |g′1(u)− g′1(v)| > 1, implying that
(u, v) 6∈ H ′1.
Consider the remaining case Xb+1 ∩ N(u) 6= ∅. Recall that nu ∈ Xb+1 ∩ N(u) such
that p(nu) = maxx∈N(u)∩Xb+1p(x). Note that l(u) < l(nu) since b(nu) = b(u) + 1.
Since nu ∈ N(u) and l(u) < l(nu), we have l(u) < l(nu) ≤ r(u). If l(v) < l(nu) then,
recalling that l(u) < l(v), it follows that l(u) < l(v) < l(nu) ≤ r(u), implying that
(u, v) ∈ E(I), which is a contradiction. Thus we have l(v) > l(nu). Since v, nu ∈ Yb, it
follows from the definition of p(·) that p(v) > p(nu). Finally we have |g′1(v) − g′1(u)| =
|1 + ǫ · (p(v) − p(m))| > 1. Therefore, (u, v) 6∈ E(H ′1).

Chapter 6. Cubicity of interval graphs 73
Construction of the indifference graph H ′2:
Let g′2 : V → R denote the unit interval representation of H ′2.
Define g′2 as follows: Let u ∈ V .
g′2(u) = 2b(u) − 1 if u ∈ Xb(u)
g′2(u) = 2b(u) if u ∈ Yb(u)
Lemma 6.12. H ′2 is a supergraph of I.
Proof: Consider an edge (u, v) ∈ E(I) such that l(u) < l(v). We show that |g′2(u) −g′2(v)| ≤ 1, which implies that (u, v) ∈ E(H ′
2). Let b(u) = b. If b(u) = b(v) = b
then clearly |g′2(u) − g′2(v)| ≤ 1. If b(u) 6= b(v) then it follows from Lemma 6.4 that
b(v) = b(u) + 1 = b + 1 and u ∈ Yb and v ∈ Xb+1. Thus, g′2(u) = 2b and g′2(v) = 2b + 1,
implying that |g′2(u) − g′2(v)| ≤ 1. Therefore, (u, v) ∈ E(H ′2).
Lemma 6.13. Let u and v be two vertices such that b(v) > b(u) and (u, v) 6∈ E(I).
If b(v) > b(u) + 1, then (u, v) 6∈ E(H ′2). Also, if b(v) = b(u) + 1 and if u 6∈ Yb(u) or
v 6∈ Xb(v), then (u, v) 6∈ E(H ′2).
Proof: We show that for any such u and v, |g′2(v) − g′2(u)| > 1, which implies that
(u, v) /∈ E(H ′2).
Consider the first case b(v) > b(u) + 1. It is clear from the definition of g′2 that
|g′2(v) − g′2(u)| > 1. The remaining case is b(v) = b(u) + 1. If u 6∈ Yb(u) then g′2(u) =
2b(u)−1. But g′2(v) ≥ 2b(v)−1 = 2b(u)+1. It follows that |g′2(v)−g′2(u)| > 1. If v 6∈ Xb(v)
then g′2(v) = 2b(v) = 2b(u) + 2. But g′2(u) ≤ 2b(u) and therefore |g′2(v) − g′2(u)| > 1.
Thus (u, v) /∈ E(H ′2).
6.2.3 The theorem
Theorem 6.14. Given an interval graph I with maximum degree ∆, cub(I) ≤⌈log2 ∆⌉ + 4.
Proof: Recall that t = ⌈log2(2∆)⌉ = ⌈log2(∆)⌉+1. We show that I =⋂t
i=1Hi∩⋂2
i=0H′i,
which by Lemma 1.19 implies our theorem. From Lemmas 6.7, 6.9 and 6.12, we know

Chapter 6. Cubicity of interval graphs 74
that each of H1, . . . , Ht, H′0, H
′1, H
′2 is a supergraph of I.
It remains to show that if (u, v) /∈ E(I) then (u, v) is not present in at least one of
the indifference graphs H1, . . . , Ht, H′0, H
′1, H
′2.
Case b(u) = b(v) and u, v ∈ Xb(u):
In this case, from Lemma 6.8, we have, (u, v) 6∈ E(⋂t
i=1Hi).
Case b(u) = b(v), and either v ∈ Yb(v) or u ∈ Yb(u):
If v ∈ Yb(v) then from Lemma 6.10, we have (u, v) 6∈ E(H ′0). Clearly, the symmetric
case u ∈ Yb(u) also follows from Lemma 6.10.
Now for the remaining case of b(u) 6= b(v) we assume without loss of generality that
b(v) > b(u).
Case b(v) = b(u) + 1:
If u ∈ Yb(u) and v ∈ Xb(v) then from Lemma 6.11 we have (u, v) 6∈ E(H ′1). If u /∈ Yb(u)
or v /∈ Xb(v) then from Lemma 6.13 we have (u, v) 6∈ E(H ′2).
Case b(v) > b(u) + 1:
In this case, from Lemma 6.13 we have (u, v) 6∈ E(H ′2).
Tight example:
Consider the star graph S = K1,n. It was shown in [51] that cub(S) = ⌈log2 n⌉. The
maximum degree of S being n, we have cub(S) = ⌈log2 ∆(S)⌉. This shows that our
upper bound of ⌈log2 ∆⌉ + 4 is tight up to the additive constant of 4.
6.3 Remarks
It follows from the results of Booth and Lueker [12] that interval graphs can be rec-
ognized in polynomial time and that an interval representation can be constructed in
polynomial time for interval graphs. Thus, given an interval graph, its cube representa-
tion in ⌈log2 ∆⌉ + 4 dimensions can also be computed in polynomial time. It should be

Chapter 6. Cubicity of interval graphs 75
noted that our result does not improve the upper bound of ⌈log2 n⌉ on cub(G)box(G)
since the
maximum degree of each interval graph in an interval graph representation of G could
be as large as n− 1.


Chapter 7
Planar graphs
The boxicity of planar graphs was shown to be at most 3 by Thomassen [57]. A better
bound holds for outerplanar graphs, a subclass of planar graphs. Scheinerman [54]
showed that the boxicity of outerplanar graphs is at most 2. But this bound does not
hold for the class of series-parallel graphs, a slightly bigger subclass of planar graphs
than the outerplanar graphs. Bohra et al. [8] showed that there exists series-parallel
graphs with boxicity 3.
In this chapter, we present an independent proof for the fact that outerplanar graphs
have boxicity at most 2.
7.1 Preliminaries
The plane drawing of a graph refers to a drawing of a graph on the plane such that
no two edges cross each other. Planar graphs are exactly those graphs that have
plane drawings. The plane drawing of a graph splits the plane into regions (contiguous
sets of points enclosed between the edges of the graph) called “faces”. A face is said to
be bounded if it is possible to draw a large enough circle that contains the whole face.
Otherwise, it is unbounded. In every plane drawing, there is exactly one face that is
unbounded, called the “outermost face”.
Pagenumber of a graph: Consider drawing a graph as follows. Arrange the vertices
77

Chapter 7. Planar graphs 78
of the graph in some order along the spine of a book and draw each edge on a page of
the book in such a way that no two edges on the same page cross each other. Such a
drawing is called a book drawing of the graph (see Figure 7.1). The minimum number of
pages required for a book drawing of a graph is called the pagenumber or book thickness
of the graph.
Figure 7.1: A book drawing of K5 using 3 pages
Book thickness of a graph was defined in 1979 by Bernhart and Kainen [6]. It was
shown by Yannakakis [64] that planar graphs have pagenumber at most 4. The following
lemma is fairly straightforward.
Lemma 7.1. Let G be a graph with n vertices. G has pagenumber 1 if and only if there
is an arrangement v1, . . . , vn of the vertices of G such that ∀i, j, k, l | i < j < k < l,
(vi, vk) ∈ E(G) ⇒ (vj, vl) 6∈ E(G).

Chapter 7. Planar graphs 79
7.2 Outerplanar graphs
Definition 7.2. Outerplanar graphs are planar graphs which have a plane drawing
such that all the vertices lie on the boundary of the outermost face.
The following lemma is from [6].
Lemma 7.3 (Bernhart and Kainen [6]). Outerplanar graphs have pagenumber at
most 1.
We shall now show that every outerplanar graph has an interval graph representation
using two interval graphs and therefore has boxicity at most 2.
Theorem 7.4. Outerplanar graphs have boxicity at most 2.
Proof: Let G be an outerplanar graph on n vertices. G therefore has pagenumber 1 by
Lemma 7.3. Consider a book drawing of G with one page in which the ordering of vertices
along the spine is given by v1, . . . , vn. For any vertex vi, define Nr(vi) = j | n ≥ j >
i and (vi, vj) ∈ E(G). Similarly, define Nl(vi) = j | 1 ≤ j < i and (vi, vj) ∈ E(G).
Let
right(vi) =
i, if Nr(vi) = ∅maxNr(vi), otherwise
and
left(vi) =
i, if Nl(vi) = ∅minNl(vi), otherwise.
We shall construct two interval graphs I1 and I2 by defining their interval represen-
tations f1 and f2 respectively as follows:
∀i, 1 ≤ i ≤ n, f1(vi) = [i, right(vi)]
∀i, 1 ≤ i ≤ n, f2(vi) = [left(vi), i]
Claim 1. I1 and I2 are supergraphs of G.
Proof: Let (vi, vj) ∈ E(G). Assume without loss of generality that i < j. Clearly,

Chapter 7. Planar graphs 80
j ∈ Nr(vi) and hence right(vi) ≥ j. Thus we have l(f1(vi)) < l(f1(vj)) ≤ r(f1(vi))
and therefore f1(vi) ∩ f1(vj) 6= ∅ implying that (vi, vj) ∈ E(I1). Similarly, i ∈ Nl(vj).
Thus, left(vj) ≤ i. We therefore get l(f2(vj)) ≤ r(f2(vi)) < r(f2(vj)) which means that
(vi, vj) ∈ E(I2).
Claim 2. If (vi, vj) 6∈ E(G), then (vi, vj) 6∈ E(I1) or (vi, vj) 6∈ E(I2).
Proof: Let (vj, vk) 6∈ E(G). Assume without loss of generality that j < k. Suppose
(vj, vk) ∈ E(I1). Therefore, f1(vj) ∩ f1(vk) 6= ∅ implying that l(f1(vj)) < l(f1(vk)) ≤r(f1(vj)). Thus, k ≤ right(vj). This means that there exists some vl with l > k such
that (vj, vl) ∈ E(G). Now, we claim that (vj, vk) 6∈ E(I2). Suppose for the sake of
contradiction that (vj, vk) ∈ E(I2). Then we have f2(vj) ∩ f2(vk) 6= ∅ implying that
l(f2(vk)) ≤ r(f2(vj)) < r(f2(vk)). Thus, left(vk) ≤ j which means that there exists
some vi with i < j such that (vk, vi) ∈ E(G). Now, we have i < j < k < l and
(vi, vk), (vj, vl) ∈ E(G) which contradicts Lemma 7.1.
It follows from Claims 1 and 2 that G = I1 ∩ I2. Hence the theorem.
7.3 Discussion
The pagenumber of a graph is a property that one would like to relate with the boxic-
ity. But some facts should be noted: complete graphs are a class of graphs with boxicity
smaller than the pagenumber and outerplanar graphs are a class of graphs with pagenum-
ber smaller than the boxicity. Again, K2,2,2 can be seen to be a graph with boxicity 3
and pagenumber 2 and at the same time planar graphs need boxicity at most 3 but
there are planar graphs that need pagenumber 4 [63]. Still, the problem is interesting as
both boxicity and pagenumber are bounded for planar graphs; a possible hint to some
geometric connection between the two parameters.
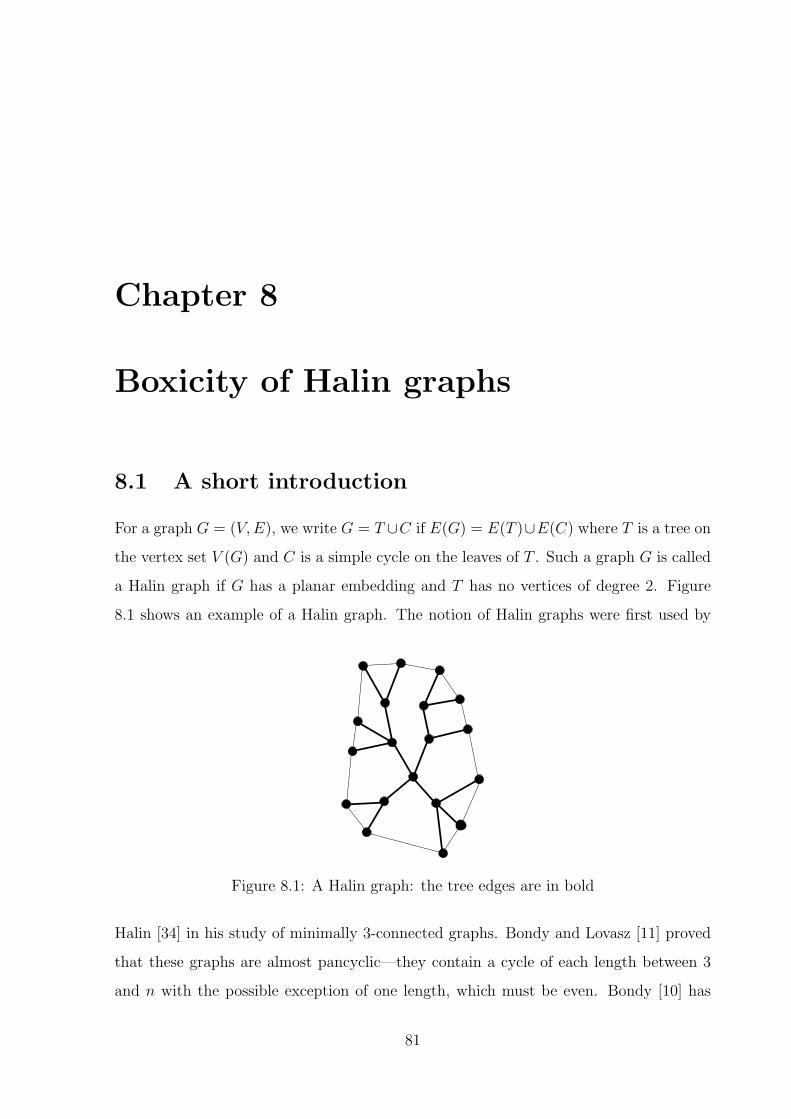
Chapter 8
Boxicity of Halin graphs
8.1 A short introduction
For a graph G = (V,E), we write G = T ∪C if E(G) = E(T )∪E(C) where T is a tree on
the vertex set V (G) and C is a simple cycle on the leaves of T . Such a graph G is called
a Halin graph if G has a planar embedding and T has no vertices of degree 2. Figure
8.1 shows an example of a Halin graph. The notion of Halin graphs were first used by
Figure 8.1: A Halin graph: the tree edges are in bold
Halin [34] in his study of minimally 3-connected graphs. Bondy and Lovasz [11] proved
that these graphs are almost pancyclic—they contain a cycle of each length between 3
and n with the possible exception of one length, which must be even. Bondy [10] has
81

Chapter 8. Boxicity of Halin graphs 82
also shown that Halin graphs are 1-Hamiltonian—i.e, they are Hamiltonian and if any
one vertex or edge from the graph is removed, the resulting graph is also Hamiltonian.
Lovasz and Plummer [44] show that every Halin graph with an even number of vertices
is minimal bicritical (a graph is bicritical if the removal of any two vertices from the
graph will result in a graph with a perfect matching). Halin graphs are also interesting
because some problems that are NP-complete for general graphs have been shown to
be polynomial-time solvable for Halin graphs. Examples are the travelling salesman
problem [22] and the problem of finding a dominating cycle with at most l vertices [56].
It has been shown in [58] that every Halin graph is a 2-interval graph—i.e., the
intersection graph of sets, each of which is the union of at most 2 intervals. We show
in this chapter that the boxicity of a Halin graph (not isomorphic to K4) is equal to 2
which means that every Halin graph is the intersection graph of axis-parallel rectangles
on the plane (in other words, Cartesian products of two intervals) as well. In fact, we
show a stronger result—we show that our result holds for any graph G = T ∪C that has
a planar embedding, even if there are vertices of degree 2 in T . Since box(G) = 1 when
G is isomorphic to K4, we show our result for graphs not isomorphic to K4.
We know that planar graphs need boxicity at most 3 [57]. It was proved in the last
chapter that outerplanar graphs, a subclass of planar graphs, need boxicity at most 2.
We show here that Halin graphs, another subclass of planar graphs, need boxicity at
most 2. Quest and Wegner [50] have characterized the graphs with boxicity at most 2
using the adjacency matrix and the “induced C–V matrices” of a graph. But as far as
we can see, there is no straightforward way to use this characterization on Halin graphs
to obtain the result presented here.
8.2 The proof
Let G = T ∪ C where C is a simple cycle connecting the leaves of a tree T such that
G is planar. Our strategy will be to construct two interval graphs G1 and G2 such that
G = G1 ∩ G2 thus proving that boxicity of G is at most 2. It can be easily seen that a

Chapter 8. Boxicity of Halin graphs 83
cycle has boxicity 2 unless it is a triangle (in which case it has boxicity 1) and a wheel
being just a universal vertex added to a cycle, has boxicity 2 unless it is a K4 (in which
case it has boxicity 1). Therefore, we will assume that G is not a wheel. For the sake of
ease of presentation, a vertex will be called a “leaf” or “leaf vertex” if it is a leaf of the
tree T . Given H ⊆ V (G), we denote by GH the subgraph induced by the vertices of H
in G. Since T is a tree, there is unique path between any two vertices u and v in T . We
denote this path by uTv.
8.2.1 Finding u′
Let S = V (G) − V (C) denote the set of internal vertices of the tree T . We claim that
there is a vertex u′ ∈ S such that |N(u′)∩ S| = 1 and |N(u′)∩ V (C)| ≥ 1. If there is no
such vertex, then GS, the induced subgraph of G on S, has no vertices of degree 1 which
is not possible since GS is a tree (GS has more than one vertex since G is not a wheel).
Now, u′ has at least one leaf of T as its neighbour since if it did not, then its degree in T
is 1 implying that u′ is a leaf of T—a contradiction since we have assumed that u′ ∈ S.
8.2.2 Fixing the root of T
Designate the internal vertex of T adjacent to u′, say r, to be the root of T . Given two
vertices u and v, u is said to be an ancestor of v if u lies in the path rTv and u is said
to be a descendant of v if v is an ancestor of u. Note that every vertex is an ancestor
and a descendant of itself. Let D(u) for any vertex u ∈ V (G) be defined as the set of all
leaves of T that are descendants of u. It can be easily seen that if u is a descendant of
v, then D(u) ⊆ D(v).
8.2.3 Ordering the vertices of C
Let |V (C)| = k and let C be p0p1 . . . pk−1p0. Note that D(u′) cannot contain all the
leaves since that would mean that D(u′) = D(r), implying that u′ is the only neighbour
of r in T . Then the degree of r in T would be 1, a contradiction since r is an internal

Chapter 8. Boxicity of Halin graphs 84
vertex in T and not a leaf. Therefore, we can always find a leaf pi ∈ D(u′) such that
p(i−1) mod k 6∈ D(u′) (recall that u′ has at least one leaf of T as its neighbour and there-
fore, D(u′) is not empty). We define lj = p(i+j) mod k, for 0 ≤ j ≤ k − 1. This implies
that lk−1 6∈ D(u′) since lk−1 = p(i−1) mod k. For u ∈ V (C), we define c(u) = i when u = li.
For the convenience of the reader, we summarize the construction as of now:
• We chose a vertex u′ such that its neighbourhood contains exactly one internal
vertex and at least one leaf of T .
• We chose the only internal vertex in the neighbourhood of u′ to be the root r of T
and defined the natural tree-order on T with r as the root. We also defined D(u)
to be the set of all leaves that are descendants (in our tree-order) of the vertex u.
• We defined a linear ordering l0, . . . , lk−1 of the vertices in V (C) (the leaves of T )
where l0 ∈ D(u′) and lk−1 6∈ D(u′).
Lemma 8.1. For any vertex u ∈ V (G), the vertices in D(u) will occur in consecutive
places in the ordering l0, . . . , lk−1 of the vertices in C. In other words, if u ∈ V (G) and
x, y, z ∈ V (C) such that c(x) < c(z) < c(y) then it is not possible that x, y ∈ D(u) and
z 6∈ D(u).
Proof: If u is a leaf of T , then the lemma is true because |D(u)| = 1. Let us assume
that this is not the case.
Consider any planar embedding of G. The cycle C divides the plane into a bounded
region and an unbounded region. We claim that all the internal vertices of T will lie in
one of these regions. Suppose there are two internal vertices of T such that they lie in
different regions of C. Then, the path between them in T will have to pass the boundary
of C. But the path cannot pass through a leaf of T and because the drawing is planar, no
edge of the path can cross the boundary of C. We thus have a contradiction. Therefore,
C forms the boundary of a face in any planar drawing of G.
Now, consider a planar embedding of G such that C forms the boundary of the
unbounded face (i.e., all the internal vertices of T lie in the bounded region of C).

Chapter 8. Boxicity of Halin graphs 85
Suppose x, y ∈ D(u) and z 6∈ D(u) such that c(x) < c(z) < c(y) (recall that c(li) = i).
Let B = xCyTuTx. It can be easily verified that B has exactly two regions—one
bounded and the other unbounded. We say that a vertex is “inside” B if it lies in the
bounded region bounded by B and say that it is “outside” B if it lies in the unbounded
region whose boundary is B. We say that a vertex “lies on” B if it is in B.
Observation 1. Because of the planar embedding of G that we have chosen, it can be
seen that any leaf vertex will have to either lie on xCy or outside B.
Observation 2. r does not lie on B.
We can assume that r 6= u since that would contradict our assumption that z 6∈ D(u).
Also, r cannot lie on yTu or uTx since it contradicts our assumption that x and y are
descendants of u and it cannot lie on xCy since it is not a leaf. Therefore, r does not lie
on B.
Observation 3. u′ is not inside B.
If u′ is inside B, then l0 cannot be outside B since u′ is adjacent to l0. From Obser-
vation 1, l0 is in xCy which implies that x = l0 (since 0 ≤ c(x) ≤ c(v), for any vertex
v ∈ xCy, as c(x) < c(y)) and u′, being the only internal vertex in N(l0), should lie on
uTx. This contradicts our assumption that u′ is inside B.
Observation 4. r is outside B.
Now suppose r is inside B. Then, u′ cannot be outside B since r is adjacent to u′
and it cannot be inside B due to Observation 3. Therefore, u′ lies on B. If u 6= u′,
then the fact that r is the only internal vertex adjacent to u′ implies that r will have
to lie on B, which contradicts Observation 2. Therefore, u = u′. Now, it can be seen
that because of our choice of u′ and r, D(u′) = N(u′) − r. This means that uTx and
uTy are the edges u′x and u′y respectively and therefore, any path from r (inside B)
to a vertex outside B will have to go through u′. Now, consider the leaf lk−1. By our
construction, lk−1 6∈ D(u′). Therefore, y 6= lk−1 and lk−1 does not lie on xCy and hence
lies outside B (from Observation 1). The path from r to lk−1 will have to go through
u′ as we have noted before—but this implies that lk−1 ∈ D(u′) which is a contradiction.
Therefore, r is outside B since we know from Observation 2 that r does not lie on B.

Chapter 8. Boxicity of Halin graphs 86
Because of Observation 4, the path zTr must contain a vertex v in B because of
our planarity assumption. But if v 6= u, then x and y cannot both be descendants of u
since either rTx or rTy will not contain u. If v = u, then rTz contains u and therefore,
z ∈ D(u), again a contradiction.
This proves our claim that for any vertex u ∈ V (G), the vertices in D(u) have to
occur consecutively in the ordering l0, l1, . . . , lk−1.
8.2.4 Construction of the interval graphs G1 and G2
We define f1 and f2 to be mappings of the vertex set V (G) to closed intervals on the
real line. Let G1 and G2 denote the interval graphs defined by f1 and f2 respectively.
For a vertex u ∈ V (G), let d(u) denote the number of ancestors of u other than itself
(or “depth” of u in T ). Let h denote the maximum depth of a vertex in T . Recall that
k = |V (C)| and S denotes the set of internal vertices of T .
Definition of f1:
For u ∈ V (G),
f1(l0) = [0, k].
f1(u) = [c(u) − 1/2, c(u) + 1/2], if u ∈ V (C) and u 6= l0.
f1(u) = [minv∈D(u)c(v),maxv∈D(u)c(v)], if u ∈ S.
Definition of f2:
For u ∈ V (G),
f2(u′) = [d(u′), h+ 2] = [1, h+ 2].
f2(u) = [d(u), d(u) + 1], if u ∈ S and u 6= u′.
f2(l0) = [h+ 2, h+ 2].
f2(l1) = [d(l1), h+ 2].
f2(lk−1) = [d(lk−1), h+ 2].
f2(u) = [d(u), h+ 1], if u ∈ V (C) and u is not l0, l1 or lk−1.

Chapter 8. Boxicity of Halin graphs 87
Lemma 8.2. G1 is a super graph of G.
Proof: Consider an edge (u, v) ∈ E(G). Clearly, (u, v) ∈ E(T ) or (u, v) ∈ E(C).
1. (u, v) ∈ E(T ).
In this case, either u is an ancestor of v or vice versa as T is a tree. Let us assume
without loss of generality that u is the ancestor of v. Therefore, D(v) ⊆ D(u).
There are two possibilities now:
(a) u and v are both internal vertices of T .
Since D(v) ⊆ D(u), we have minx∈D(u)c(x) ≤ minx∈D(v)c(x) ≤maxx∈D(v)c(x) ≤ maxx∈D(u)c(x). Therefore, f1(u) ∩ f1(v) 6= ∅, which
implies that (u, v) ∈ E(G1).
(b) u is an internal vertex of T and v is a leaf vertex of T .
Since v ∈ D(u), minx∈D(u)c(x) ≤ c(v) ≤ maxx∈D(u)c(x). Thus, both
f1(u) and f1(v) contain the point c(v) and therefore, (u, v) ∈ E(G1) (Note
that c(l0) = 0 and thus c(l0) ∈ f1(l0)).
2. (u, v) ∈ E(C).
Without loss of generality, we can assume that u = li, for some i, and v =
l(i+1) mod k. For 1 ≤ i ≤ k − 2, f1(u) and f1(v) contain the point i+ 1/2. If u = l0
or v = l0, then it is clear that (u, v) ∈ E(G1), since f1(l0) contains f1(u),∀u ∈ V (G).
Therefore, G1 is a supergraph of G.
Lemma 8.3. G2 is a supergraph of G.
Proof: Consider an edge (u, v) ∈ E(G). We have the following three cases now.
1. u or v is l0.
By our choice of l0, it is adjacent only to l1, lk−1 and u′ in G. Since f2(l0),
f2(l1), f2(lk−1) and f2(u′) contain the point h+ 2, all the edges incident on l0 in G
are also present in G2.
Chapter 8. Boxicity of Halin graphs 88
2. (u, v) ∈ E(T ), u 6= l0 and v 6= l0.
Let us assume without loss of generality that u is the parent of v. It is easily
seen that d(v) = d(u) + 1. Since u 6= l0 and v 6= l0, the point d(u) + 1 is contained
in both f2(u) and f2(v) (Recall that d(u) ≤ h, ∀u ∈ V (G)).
3. (u, v) ∈ E(C), u 6= l0 and v 6= l0.
Since u and v are leaf vertices, f2(u) and f2(v) both contain the point h + 1
and therefore (u, v) ∈ E(G2).
This shows that G2 is a supergraph of G.
Lemma 8.4. G = G1 ∩G2.
Proof: Since Lemmas 8.2 and 8.3 have established that G1 and G2 are supergraphs of
G, it is sufficient to show that, for any pair of vertices u, v ∈ V (G), (u, v) 6∈ E(G) implies
(u, v) 6∈ E(G1) or (u, v) 6∈ E(G2). Consider such a pair of vertices. There are three cases
to be considered.
1. One of u or v is l0.
Let us assume without loss of generality that u = l0. (u, v) 6∈ E(G) now implies
that v ∈ V (G)−l1, lk−1, u′ since l0 is only adjacent to l1, lk−1 and u′ in G. It can
be easily verified that only f2(u′), f2(l1) and f2(lk−1) have a non-empty intersection
with f2(l0). Therefore, (u, v) 6∈ E(G2).
2. u 6= l0, v 6= l0 and one of u and v is the ancestor of the other.
Let us assume without loss of generality that u is the ancestor of v. This
implies that d(v) ≥ d(u) + 2 since (u, v) 6∈ E(G). We know that u 6= u′ since
all the descendants of u′ are its neighbours by our choice of u′ and the root r.
Now, since u 6= u′, the right end-point of f2(u) is d(u) + 1 and for all possible
choices of v (excluding l0), the left end-point of f2(v) is d(v) ≥ d(u)+2. Therefore,
f2(u) ∩ f2(v) = ∅ by the definition of f2. Thus, in this case, (u, v) 6∈ E(G2).
3. u 6= l0, v 6= l0 and neither one of u and v is an ancestor of the other.
One of the following three subcases hold.
Chapter 8. Boxicity of Halin graphs 89
(a) u and v are both leaves of T .
Let u = li and v = lj. Assume without loss of generality that i < j.
Since neither of u or v is l0, we have 1 ≤ i < j ≤ k − 1. Also, j > i + 1 as
(u, v) 6∈ E(G). Therefore, f1(li) ∩ f1(lj) = ∅, from the definition of f1. Thus,
we have (u, v) 6∈ E(G1).
(b) u and v are both internal vertices of T .
Since u 6∈ rTv and v 6∈ rTu, we have D(u)∩D(v) = ∅ (To see this, suppose
there is a vertex z ∈ D(u) ∩ D(v). Then both u and v would lie on rTz,
implying that either u ∈ rTv or v ∈ rTu). Now, from Lemma 8.1, we have
maxx∈D(u)c(x) < minx∈D(v)c(x) or maxx∈D(v)c(x) < minx∈D(u)c(x).
By the definition of f1, it can be seen that f1(u) ∩ f1(v) = ∅, implying that
(u, v) 6∈ E(G1).
(c) One of u and v is a leaf of T and the other is an internal vertex of T .
Let us assume that u is an internal vertex and v is a leaf of T . Since we
are considering the case when neither of u and v is an ancestor of the other
and neither is l0, we have v 6∈ D(u) and v 6= l0. From Lemma 8.1, we know
that either c(v) < minx∈D(u)c(x) or c(v) > maxx∈D(u)c(x). Therefore,
by definition of f1 and because v 6= l0, f1(u) ∩ f1(v) = ∅ and thus we have
(u, v) 6∈ E(G1).
Since we have considered all possible cases when (u, v) 6∈ E(G) and have shown that
in each case, (u, v) is not present either in E(G1) or in E(G2), it follows that G = G1∩G2.
Now, to complete the proof, we show that if G is not isomorphic to K4, then box(G) ≥2. Suppose G is not isomorphic to K4. We will show that G is not an interval graph. By
definition of G, |V (C)| ≥ 3. If |V (C)| > 3, then C is an induced cycle with more than
3 vertices which means that G cannot be an interval graph and therefore box(G) ≥ 2.
If |V (C)| = 3, then C is a triangle. Now, all the leaves in V (C) cannot be adjacent to
the same internal vertex of T . To see this, look at GS, the subgraph induced by S in

Chapter 8. Boxicity of Halin graphs 90
G (recall that S = V (G) − V (C), or the set of internal vertices of T ). Since G is not
isomorphic to K4, GS is a tree with more than one vertex. Therefore, there are at least
two vertices of degree 1 in GS. But if all the vertices in V (C) are adjacent only to one
vertex of S in G, there should be at least one vertex in S with degree 1 in G—which is a
contradiction since all vertices of S, being internal vertices of T , have degree more than
1 in G. Therefore, we can find two leaves, say x and y, of T such that they are adjacent
to different internal vertices in T . Let u and v denote the internal vertices of T adjacent
to x and y respectively. Now, xuTvyx forms an induced cycle of length greater than or
equal to 4 (note that x and y are adjacent since |V (C)| = 3). Therefore, G cannot be
an interval graph. Thus, we have box(G) ≥ 2.
8.3 Results
From the discussion in the last section, we have the main result of this chapter in the
form of the following theorem.
Theorem 8.5. If G = T ∪ C, where T is a tree and C is a simple cycle of the leaves
of T such that G is planar, then box(G) = 2 if G is not isomorphic to K4.
Corollary 8.6. Every Halin graph has boxicity equal to 2 unless it is isomorphic to
K4, in which case it has boxicity equal to 1.

Chapter 9
Conclusion
9.1 Improvements
Some of the results presented in this thesis have been since improved. A short survey of
these and other related results follows.
In Chapter 2, we showed that for any graph G with maximum degree ∆, box(G) ≤2∆2. This upper bound has been improved to box(G) ≤ ∆2 + 2 for any graph G by
Esperet [28]. That paper improves upon the basic idea of colouring the graph by using
a more sophisticated colouring scheme and a modified interval graph representation to
achieve the better bound.
The upper bound on the cubicity of interval graphs presented in Chapter 6 has also
been improved. In a recent unpublished work, Adiga and Chandran [1] show that for
any interval graph G, cub(G) ≤ ⌈log2 ψ(G)⌉ + 2 where ψ(G) is defined as the largest
integer m such that K1,m, the star graph with m arms, is an induced subgraph of G.
Note that ψ(G) ≤ ∆ where ∆ is the maximum degree of G and therefore, this is a much
tigher bound when compared to our upper bound of ⌈log2 ∆⌉ + 4.
91

Chapter 9. Conclusion 92
9.2 Open problems
9.2.1 Boxicity and maximum degree
We conjectured in Chapter 2 that the boxicity of any graph with maximum degree is
O(∆). The conjecture is still open and any progress towards proving or disproving the
conjecture would be exciting.
9.2.2 The boxicity of hypercubes
Chandran and Sivadasan show in [17] that the cubicity of the d-dimensional hyper cube
Hd is Θ( dlog d
). This automatically shows that box(Hd) is O( dlog d
). We do not know of
any tighter upper bound for the boxicity of the d-dimensional hypercube. The problem
of whether a tighter upper bound exists seems to be an interesting one.
9.2.3 Cubicity of planar graphs
We know that any planar graph has boxicity at most 3 [57]. Now, what about the
cubicity? The result from [15] gives us an upper bound of 3⌈log2 n⌉ for the cubicity of
any planar graph on n vertices but is it the best possible bound? In terms of n only, we
cannot hope to achieve a bound better than ⌈log2 n⌉ as the star graph is a planar graph
with cubicity ⌈log2 n⌉. But a better bound might be possible in terms of other graph
parameters.
9.2.4 Algorithms for computing the boxicity
In many practical applications, the graphs that arise have some special structure that
can be utilized for speeding up the computations on them. Although it is NP-hard
to compute the boxicity of general graphs, we could restrict ourselves to special graph
classes and see if the problem becomes polynomial-time solvable.
Chapter 9. Conclusion 93
9.2.5 Hard problems on bounded boxicity graphs
We have seen in Section 1.5.1 that the max-clique problem is polynomial-time solvable if
the box representation of the input graph in a bounded number of dimensions is available.
It was also mentioned that better approximation algorithms could be constructed for
some problems with the assumption that a box or cube representation of the input graph
in a bounded number of dimensions is available. What other hard problems become easier
to solve given a low dimensional box or cube representation is worth studying.
9.2.6 Fixed-parameter tractable algorithms
Fixed-parameter tractable or FPT algorithms typically solve hard problems in O(f(k)nc)
time where n is the input size, c is a constant and k is an input parameter that depends
on the problem instance. f can be any function that is defined solely in terms of k.
The idea is that if the input parameter for all the problem instances that we need to
solve is small, then the algorithm performs well for all the required problem instances.
A number of FPT algorithms use the treewidth of the input graph as a parameter.
Chandran and Sivadasan [16] showed that box(G) ≤ tw(G) + 2. As noted before, the
max-clique problem is polynomial-time solvable if the box representation of the input
graph in a bounded number of dimensions is available. It might therefore be possible
that FPT algorithms could be constructed with the boxicity of the graph as a parameter.
9.3 Endnote
The author is aware that this thesis is more of a collection of results on boxicity and
cubicity than a comprehensive guide to these topics. A large body of literature is available
for the interested reader who wishes to pursue the study of geometric intersection graphs
and a number of references are listed in the bibliography that follows.
Though primarily defined in terms of the intersection of geometric objects, the combi-
natorial nature of boxicity and cubicity are evinced by their relationship with parameters

Chapter 9. Conclusion 94
such as the partial order dimension. Being natural generalizations of the widely stud-
ied class of interval graphs, and possessing a neat geometric intersection model, the
class of intersection graphs of boxes and cubes offers an exciting direction of research.
Generalizations of other geometric intersection models might also be attempted.


Bibliography
[1] A. Adiga and L. S. Chandran. Cubicity of interval graphs and the claw num-
ber. To appear in EuroComb 2009, Bordeaux. Preprint available online at
http://arxiv.org/abs/0903.1197.
[2] P. K. Agarwal, M. van Kreveld, and S. Suri. Label placement by maximum inde-
pendent set in rectangles. Comput. Geom., 11(3-4):209–218, 1998.
[3] D. Angluin and L. G. Valiant. Fast probabilistic algorithms for hamiltonian circuits
and matchings. J. Comput. System Sci., 18(2):155–193, 1979.
[4] S. Bellantoni, I. B.-A. Hartman, T. Przytycka, and S. Whitesides. Grid intersection
graphs and boxicity. Discrete Math., 114(1-3):41–49, 1993.
[5] P. Berman, B. DasGupta, S. Muthukrishnan, and S. Ramaswami. Efficient approx-
imation algorithms for tiling and packing problems with rectangles. J. Algorithms,
41(2):443–470, 2001.
[6] F. Bernhart and P. C. Kainen. The book thickness of a graph. J. Combin. Theory
Ser. B, 27(3):320–331, 1979.
[7] H. L. Bodlaender. A tourist guide through treewidth. Acta Cybernet., 11(1-2):1–21,
1993.
[8] A. Bohra, L. S. Chandran, and J. K. Raju. Boxicity of series parallel graphs. Discrete
Math., 306(18):2219–2221, 2006.
[9] B. Bollobas. Random Graphs. Cambridge University Press, 2 edition, 2001.
96

BIBLIOGRAPHY 97
[10] J. A. Bondy. Infinite and Finite Sets 1, volume 10 of Colloquia Mathematica Soci-
etatis Janos Bolyai, chapter Pancyclic graphs: recent results, pages 181–187. North-
Holland, 1975.
[11] J. A. Bondy and L. Lovasz. Lengths of cycles in halin graphs. J. Graph Theory,
9(3):397–410, 1985.
[12] K. S. Booth and G. S. Lueker. Testing for the consecutive ones property, interval
graphs, and graph planarity using PQ-tree algorithms. J. Comput. System Sci.,
13(3):335–379, 1976.
[13] T. M. Chan. Polynomial-time approximation schemes for packing and piercing fat
objects. J. Algorithms, 46(2):178–189, 2003.
[14] L. S. Chandran, C. Mannino, and G. Orialo. On the cubicity of certain graphs.
Inform. Process. Lett., 94(3):113–118, 2005.
[15] L. S. Chandran and K. A. Mathew. An upper bound for cubicity in terms of boxicity.
Discrete Math., 309(8):2571–2574, 2009.
[16] L. S. Chandran and N. Sivadasan. Boxicity and treewidth. J. Combin. Theory Ser.
B, 97(5):733–744, 2007.
[17] L. S. Chandran and N. Sivadasan. The cubicity of hypercube graphs. Discrete
Math., 308(23):5795–5800, 2008.
[18] L. Sunil Chandran and N. Sivadasan. Geometric representation of graphs in low
dimension. In Proceedings of the 12th Annual International Computing and Combi-
natorics Conference, Taipei, Taiwan, pages 398–407, August 2006.
[19] Y.-W. Chang and D. B. West. Interval number and boxicity of digraphs. In Pro-
ceedings of the 8th International Graph Theory Conf., pages 171–179. Wiley, 1998.

BIBLIOGRAPHY 98
[20] Y.-W. Chang and D. B. West. Rectangle number for hypercubes and complete
multipartite graphs. In 29th SE Conf. Comb., Graph Th. and Comp., volume 132
of Congr. Numer., pages 19–28, 1998.
[21] J. E. Cohen. Food Webs and Niche Space, volume 11 of Monographs in Population
Biology. Princeton University Press, New Jersey, 1978.
[22] G. Cornuejols, D. Naddef, and W. R. Pulleyblank. Halin graphs and the travelling
salesman problem. Math. Program., 26(3):287–294, 1983.
[23] M. B. Cozzens. Higher and Multidimensional Analogues of Interval graphs. PhD
thesis, Rutgers University, 1981.
[24] M. B. Cozzens and F. S. Roberts. Computing the boxicity of a graph by covering
its complement by cointerval graphs. Discrete Appl. Math., 6(3):217–228, 1983.
[25] I. Dagan, M. C. Golumbic, and R. Y. Pinter. Trapezoid graphs and their coloring.
Discrete Appl. Math., 21(1):35–46, 1988.
[26] Reinhard Diestel. Graph Theory, volume 173. Springer Verlag, New York, 2 edition,
2000.
[27] T. Erlebach, K. Jansen, and E. Seidel. Polynomial-time approximation schemes for
geometric intersection graphs. SIAM J. Comput., 34(6):1302–1323, 2005.
[28] L. Esperet. Boxicity of graphs with bounded degree. European J. Combin.,
30(5):1277–1280, 2009.
[29] U. Feige. Approximating the bandwidth via volume respecting embeddings. In
Proceedings of the 30th Annual ACM Symposium on Theory of Computing, pages
90–99. ACM Press, 1998.
[30] R. B. Feinberg. The circular dimension of a graph. Discrete Math., 25(1):27–31,
1979.

BIBLIOGRAPHY 99
[31] P. C. Fishburn. On the sphericity and cubicity of graphs. J. Combin. Theory Ser.
B, 35(3):309–318, 1983.
[32] M. C. Golumbic. Algorithmic Graph Theory and Perfect Graphs. Academic Press,
New York, 1980.
[33] M. C. Golumbic and A. N. Trenk. Tolerance Graphs, volume 89 of Cambridge studies
in advanced mathematics. Cambridge University Press, 2004.
[34] R. Halin. Studies on minimally n-connected graphs. In D.J.A. Welsh, editor, Com-
binatorial Mathematics and its Applications, pages 129–136. Academic Press, New
York, 1971.
[35] J. Hastad. Clique is hard to approximate within n1−ǫ. Acta Math., 182(1):105–142,
1999.
[36] R. Heckmann, R. Klasing, B. Monien, and W. Unger. Optimal embedding of com-
plete binary trees into lines and grids. J. Parallel Distrib. Comput., 49(1):40–56,
1998.
[37] T. Kloks. Treewidth: Computations and Approximations, volume 842 of Lecture
Notes in Computer Science. Springer Verlag, Berlin, 1994.
[38] T. Kloks, D. Kratsch, Y. Le Borgne, and H. Muller. Bandwidth of split and circular
permutation graphs. In Proceedings of the 26th International Workshop on Graph-
Theoretic Concepts in Computer Science (WG 2000), LNCS 1928, pages 243–254.
Springer-Verlag, 2000.
[39] T. Kloks, D. Kratsch, and H. Muller. Approximating the bandwidth of asteroidal
triple-free graphs. J. Algorithms, 32(1):41–57, 1999.
[40] J. Kratochvıl. A special planar satisfiability problem and a consequence of its NP–
completeness. Discrete Appl. Math., 52(3):233–252, 1994.

BIBLIOGRAPHY 100
[41] D. Kratsch and L. Stewart. Domination on cocomparability graphs. SIAM J.
Discrete Math., 6(3):400–417, 1993.
[42] D. Kratsch and L. Stewart. Approximating bandwidth by mixing layouts of interval
graphs. SIAM J. Discrete Math., 15(4):435–449, 2002.
[43] C.G. Lekkerkerker and J.C. Boland. Representation of a finite graph by a set of
intervals on the real line. Fund. Math., 51:45–64, 1962.
[44] L. Lovasz and M. Plummer. On a family of planar bicritical graphs. Proc. Lond.
Math. Soc. (3), 30:160–176, 1975.
[45] H. Maehara. Sphericity exceeds cubicity for almost all complete bipartite graphs.
J. Combin. Theory Ser. B, 40(2):231–235, 1986.
[46] T. A. McKee and F. R. McMorris. Topics in Intersection Graph Theory. SIAM,
1999.
[47] T.S. Michael and T. Quint. Sphere of influence graphs and the L∞-metric. Discrete
Appl. Math., 127(3):447–460, 2003.
[48] T.S. Michael and T. Quint. Sphericity, cubicity, and edge clique covers of graphs.
Discrete Appl. Math., 154(8):1309–1313, 2006.
[49] E. Prisner. A characterization of interval catch digraphs. Discrete Math., 73(3):285–
289, 1989.
[50] M. Quest and G. Wegner. Characterization of the graphs with boxicity ≤ 2. Discrete
Math., 81(2):187–192, 1990.
[51] F. S. Roberts. On the boxicity and cubicity of a graph. In Recent Progresses in
Combinatorics, pages 301–310. Academic Press, 1969.
[52] F. S. Roberts. Theory and Applications of Graphs, volume 642 of Lecture Notes
in Computer Science, chapter Food webs, competition graphs, and the boxicity of
ecological phase space, pages 477–490. Springer Berlin/Heidelberg, 1978.

BIBLIOGRAPHY 101
[53] B. Rosgen and L. Stewart. Complexity results on graphs with few cliques. Discrete
Math. Theor. Comput. Sci., 9(1):127–136, 2007.
[54] E. R. Scheinerman. Intersection Classes and Multiple Intersection Parameters. PhD
thesis, Princeton University, 1984.
[55] J. B. Shearer. A note on circular dimension. Discrete Math., 29(1):103–103, 1980.
[56] M. Skowronska and M. M. Sys lo. Dominating cycles in halin graphs. Discrete Math.,
86(1-3):215–224, 1990.
[57] C. Thomassen. Interval representations of planar graphs. J. Combin. Theory Ser.
B, 40(1):9–20, 1986.
[58] W. T. Trotter and F. Harary. On double and multiple interval graphs. J. Graph
Theory, 3(3):205–211, 1979.
[59] W. T. Trotter and Jr. D. B. West. Poset boxicity of graphs. Discrete Math.,
64(1):105–107, 1987.
[60] J. Turner. On the probable performance of heuristics for bandwidth minimization.
SIAM J. Comput., 15(2):561–580, 1986.
[61] W. Unger. The complexity of the approximation of the bandwidth problem. In
Proceedings of the 39th Annual Symposium on Foundations of Computer Science,
pages 82–91. IEEE Computer Society, 1998.
[62] M. Yannakakis. The complexity of the partial order dimension problem. SIAM J.
Algebraic Discrete Methods, 3(3):351–358, 1982.
[63] M. Yannakakis. Four pages are necessary and sufficient for planar graphs. In Proceed-
ings of the 18th Annual ACM Symposium on Theory of Computing, pages 104–108,
1986.
[64] M. Yannakakis. Embedding planar graphs in four pages. J. Comput. System Sci.,
38(1):36–67, 1989.







