
Internet Piloted Blimp
Alfredo Guevara, Jr.
Advisor: Professor Spinelli
March 1, 2008

Goals
Create a control system to remotely pilot an RC blimp over the internet
Show real time video images to the ‘pilot’.
Maneuverability: Internet control as close as possible to remote control

Control System
Wireless Camera Images to Host
Motor ControlsPPM Signals
Host PC sends video image to the pilot
Pilot sends Motor Control Data to the host
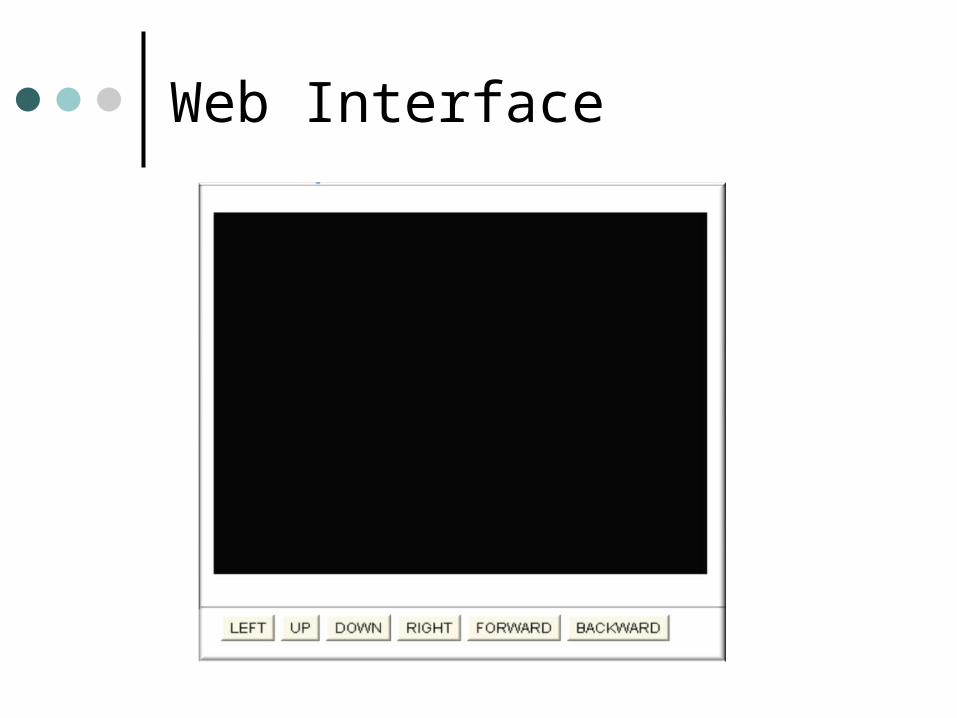
Web Interface

System Components
Physical SystemPC (Host and Pilot)
Microcontroller
RC Transmitter
Wireless Camera

Design Criteria
The blimp max payload capacity was 7 oz.
The blimp, currently located in Olin, can be controlled from anywhere using the Internet.
The blimp should be in operation for at least 30 minutes.
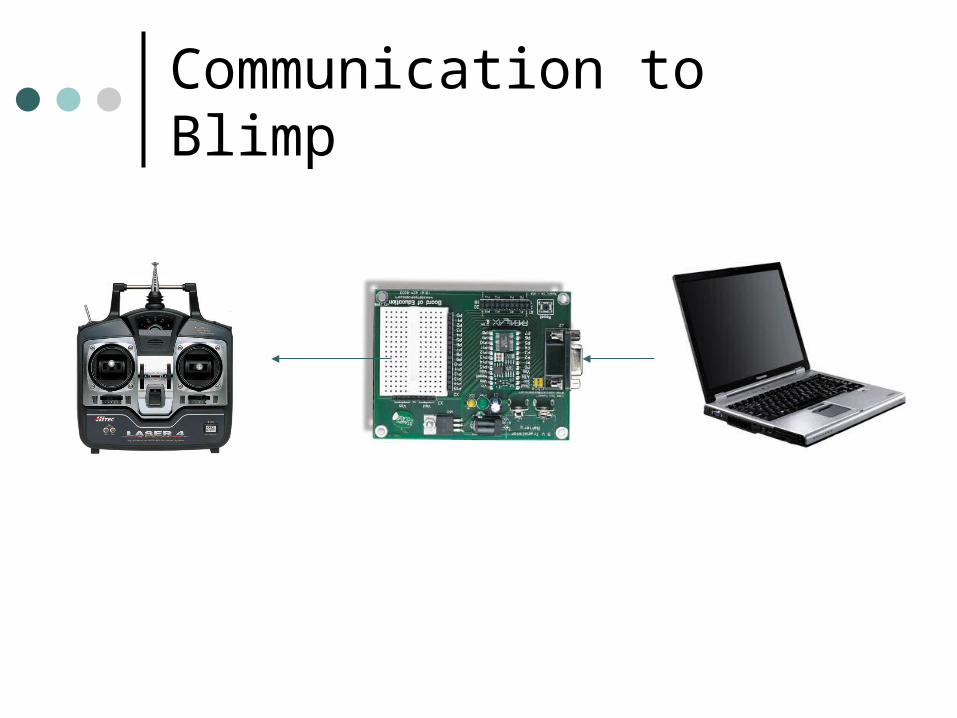
Communication to Blimp

Host
The host was a laptop due to its easy mobility.
The host computer contains the web server.
It captured the video image from the blimp and streamed it to the Web page.
It has a stand alone program that read the desired motor control from a Socket and sent it through the Serial Port

Microcontroller
A Basic Stamp 2sx was used to send motor control signals to the transmitter.
A Voltage conversion circuit was created to produce the appropriate voltage for the motor control signal.
Each signal sent had information for 3 channels. Ch1: The speed and direction of the tail motor Ch2: The direction of the rotation of the motors
attached to the gondola Ch3: The position of the motors attached to the
gondola.

Pulse Position Modulation
CH1: Left/Right CH2: Up/Down/Front/Back CH3: Motor Position

Interface Circuit
R1
56k
R2
1k L1
L1
Pulse into R/C
Pulse from BS
10V from Control

Wireless Camera Communication

Video Capture
The wireless camera was used as a webcam.Frame Rate: 297 Kbps Image 320 X 240Color Camera
It sent real time images to the Host.

Software System
Microcontroller: PBASIC
Host PC: JAVA Stand alone program
Microsoft Encoder.
Web Interface:
HTML
JAVA Applet

Software Design
PBASIC: Basic Stamp sent pulses to the Remote Control
Web Interface: sent motor control to the host by the click of a button.
Host: The host received information from the web interface and sent it to the Serial Port

PBASIC
This code was used to send time pulses ranging from 1ms to 2 ms to the interface circuit.
The PPM signal has to have a 20 ms duration
The PBASIC received information from the Host’s Serial Port.

Sample Code Vertical DirectionPULSOUT 2, 18037 ' Sync send a clean slate. OUT2=POL2 ' return for .3 millisecondsOUT2=POL2PULSOUT 2, 1500 ' Ch1 The direction and speed of the tail finOUT2=POL2 OUT2=POL2PULSOUT 2, 1013 ' Ch2 The direction of the spin and its speedOUT2=POL2OUT2=POL2PULSOUT 2, 1100 'Ch3 The position of the motorsOUT2=POL2OUT2=POL2PULSOUT 2, 1475 ' Ch 4 UnusedOUT2=POL2OUT2=POL2

Web Interface
The basic user friendly Interface was designed in HTML.
Buttons for the direction were placed in the Interface using a Java Applet Up, Down, Front, Back, Left, Right
The interface also shows the image from
the wireless camera.

Java within the Host
The Host had a Stand Alone Java program that read the Motor Control data in from a socket Socket 3333.
After the data is read, the program sends the information to the Serial Port in form of numbers with the use of the RXTX library.

Results
The payload is 6.7 oz. Motor Control data was successfully
sent from ‘pilot’ PC to Host PC Host PC successfully sent information
to the Microcontroller The Microcontroller sent PPM signals
to the Remote Control. Maneuverability Test to come.
Future Work
With a larger payload capacity Blimp more features can be added: Tilt camera or sensors to collect any type of
data such as height and speed
A different device can be controlled such as a helicopter, an RC plane or even a micro device.
Different type of transmitters can be added to allow for use anywhere on campus by using relay stations.

THANK YOU
Professor Spinelli
Professor Burns
Professor Hedrick
Professor Spallholz
Chemistry Department

QUESTIONS
?







