
1
Improving High Resolution Tropical Cyclone Prediction Using a Unified GSI-based Hybrid Ensemble-Variational Data Assimilation System for HWRF
Xuguang Wang
University of Oklahoma, Norman, OK
In close collaboration with NCEP/EMC, ESRL/PSD, AOML/HRD
Warn On Forecast and High Impact Weather Workshop, Feb. 6, 2013

2
Background History of hybrid DA
Development of theory
Research with simple model and simulated data
System development for real NWP model and test real data
Operational implementation at NWP centers for global model: e.g., GSI-based hybrid Ensemble-Variational DA for NCEP GFS
2
10 y
ears

33
Background GSI is a unified system which provides data assimilation for current operational global and regional forecast system.
Efforts are being conducted to integrate the same GSI-based hybrid DA system with operational regional forecast systems.
GSI-EnKF hybrid
GFS HWRFRapid Refresh (RR)NAM

44
Background
Unifying GSI-based hybrid DA system with operational regional systems facilitates faster transition to operations.
The focus of the project is the extension, application, extensive testing and research of the GSI-based hybrid data assimilation for the HWRF modeling system at high resolutions.
Also motivated by encouraging results of ensemble based data assimilation for tropical cyclones.

55Li et al., 2012, MWR
3DVAR hybrid
700 mb wind 700 mb wind
850 mb temp850 mb temp
•Hurricane IKE 2008
•WRF ARW: Δx=5km
•Observations: radial velocity from two WSR88D radars (KHGX, KLCH)
•WRFVAR hybrid DA system (Wang et al. 2008a)
Background

66
control forecastGSI-ECV
control analysis
data assimilationFirst guess forecast
control forecast
Ensemble covariance
EnKF
EnKF analysis k
member 1 forecast
member 2 forecast
member k forecast
EnKF analysis 2
EnKF analysis 1
member 1 forecast
member 2 forecast
member k forecast
member 1 analysis
member 2 analysis
member k analysis
Re-center E
nKF
analysis ensemble
to control analysis
GSI-based hybrid ensemble-variational DA system
Wang, Parrish, Kleist, Whitaker 2013, MWR

7
''1''1
2'1
1'11
211'1
2
1
2
1
2
1
,
HxyHxyαCαxBx
αx
oToTT
oe JJJJ
R
K
k
ekk
1
'1
' xαxx
7
• GSI-ECV: Extended control variable (ECV) method (Lorenz 2003; Buehner 2005; Wang et al. 2007a, 2008a, Wang 2010):
Extra term associated with extended control variable
Extra increment associated with ensemble
GSI-based hybrid ensemble-variational DA system
• EnKF: square root filter interfaced with GSI observation operator (Whitaker et al. 2008)

88
Why Hybrid? “Best of both worlds” VAR (3D, 4D)
EnKF Hybrid References (e.g.)
Benefit from use of flow dependent ensemble covariance instead of static B
Yes Yes Hamill and Snyder 2000; Lorenc 2003; Etherton and Bishop 2004; Zupanski 2005, Wang et al. 2007ab,2008ab, 2009; Buehner et al. 2010ab; Wang 2011, etc.
Robust for small ensemble or large model error
Yes Wang et al. 2007b, 2009; Buehner et al. 2010b
Better localization for integrated measure, e.g. satellite radiance; radar with attenuation
Yes Campbell et al. 2010
Flexible to add various dynamical/physical constraints
yes Yes Wang et al. 2013
Use of various existing capabilities in VAR (e.g., Outer loops to treat nonlinearity; Variational QC)
yes Yes
Summarized in Wang 2010, MWR

9
Experiment with Airborne radar
• Model: HWRF Δx=9km ( 3km next)
•Observations: radial velocity from Tail Doppler Radar (TDR)
• Case: IRENE 2011
• Initial and LBC ensemble: GFS global hybrid DA system
• Ensemble size: 40
• Initial test focuses on the impact of the use of the ensemble covariance in GSI
IRENE 2011IRENE
2011
Li et al. 2013, AMS presentation

10
DA cycling configuration
GSI 3DVar
EnKF
Hybrid (1 way coupling)
11
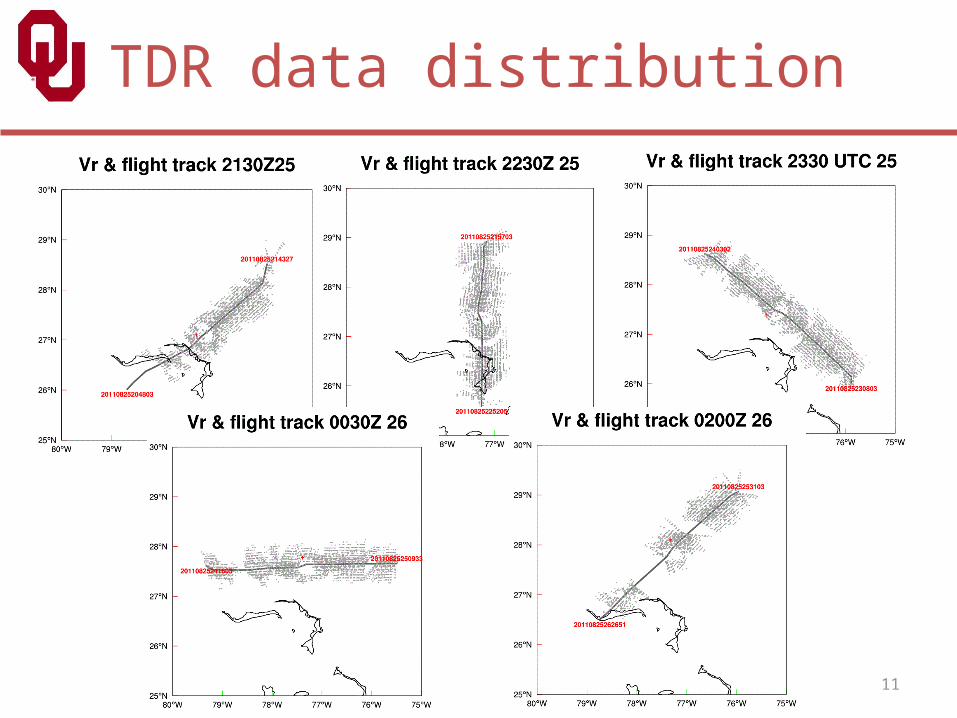
TDR data distribution

12
TDR data distribution
m/s

13
700 mb wind increment
m/s m/s
GSI 3DVar 3DEnsVar

14
Verification against independent flight level wind speed
kmkm
GSI 3DVar 3DEnsVarFirst Leg
15
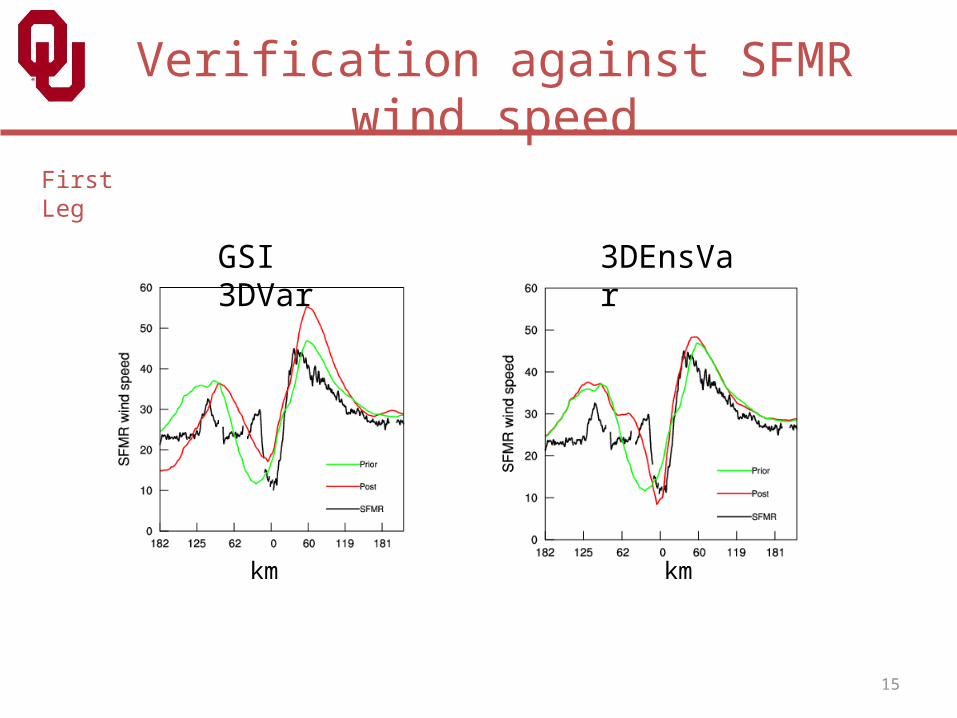
Verification against SFMR wind speed
kmkm
GSI 3DVar 3DEnsVar
First Leg

16
Verification against independent flight level wind speed
kmkm
GSI 3DVar 3DEnsVar
Last Leg

17
Verification against SFMR wind speed
kmkm
3DEnsVarGSI 3DVar
Last Leg

1818
Comparison with radar wind analysiskm
m/s
km km km
m/s m/s
HRD radar wind analysis GSI 3DVAR 3DEnsVar
18
1919
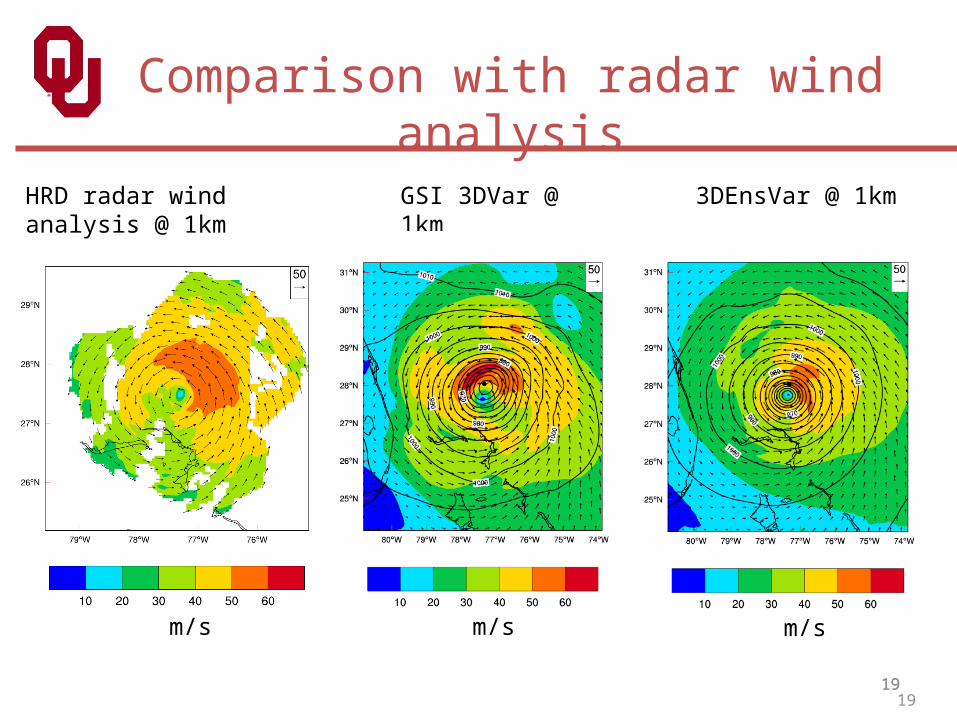
Comparison with radar wind analysis
m/s m/s m/s
GSI 3DVar @ 1km 3DEnsVar @ 1kmHRD radar wind analysis @ 1km
19

20
Comparison with radar wind analysis
m/s m/s m/s
GSI 3DVar @ 3km 3DEnsVar @ 3kmHRD radar wind analysis @ 3km
21
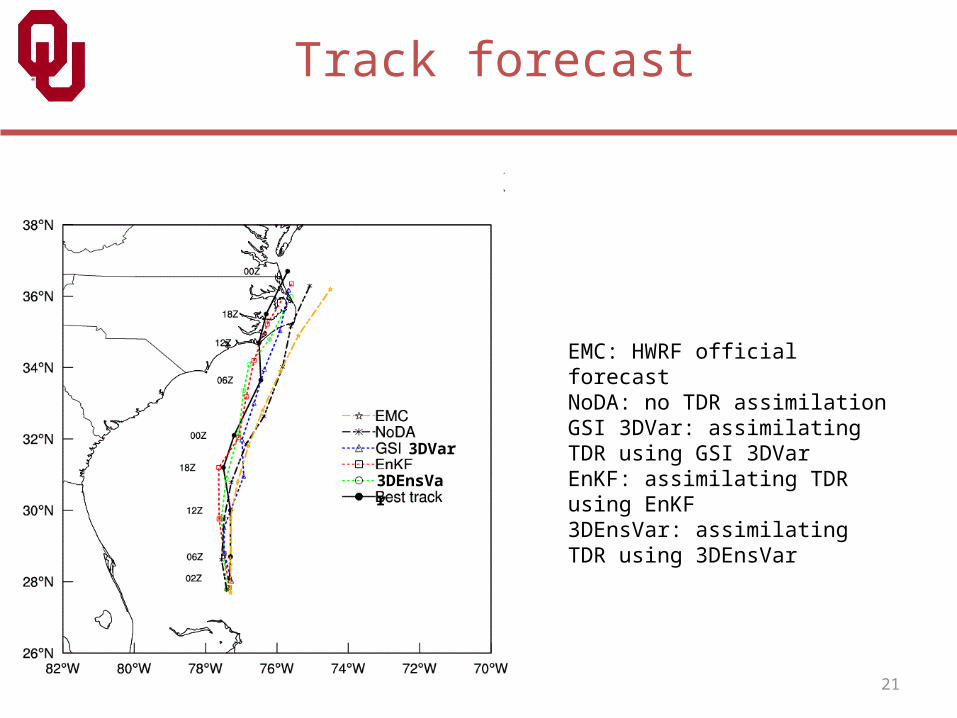
Track forecast
EMC: HWRF official forecastNoDA: no TDR assimilationGSI 3DVar: assimilating TDR using GSI 3DVarEnKF: assimilating TDR using EnKF3DEnsVar: assimilating TDR using 3DEnsVar
3DEnsVar
3DVar

22
MSLP forecast
EMC: HWRF official forecastNoDA: no TDR assimilationGSI 3DVar: assimilating TDR using GSI 3DVarEnKF: assimilating TDR using EnKF3DEnsVar: assimilating TDR using 3DEnsVar
3DEnsVar
3DVar

23
Summary and ongoing work
a. The GSI-based hybrid EnKF-Var data assimilation system was expanded to assimilate TDR data for HWRF.
b. TDR data showed positive impact on TC track and intensity forecasts and verification against independent observations.
c. Various diagnostics and verifications suggested ensemble-based data assimilation (hybrid, EnKF) provided more skillful TC analysis and forecasts than the GSI 3DVar.
d. Testing more missions/cases.e. Testing dual resolution 3km/9km hybrid; 3km’s own hybrid.f. Developing and testing GSI-based hybrid EnKF-Var with
moving nests.g. Add and test more observations.h. Develop and research on various new capabilities for HWRF
hybrid (4DEnsVar, hydrometeor, post balance constraint, etc.).

24
• The current GSI hybrid is 3D (3DEnsVar); temporal evolution of error covariance with the assimilation window not considered
• Observations (e.g., satellite, radar) are spreading through the DA window.
• 4DENSVAR is further developed.
• Different from traditional 4DVAR, 4DENSVAR conveniently avoid the tangent linear and adjoint of the forecast model which is challenging to build and maintain (e.g., Buehner et al. 2010).
• Much cheaper compared to traditional 4DVAR being developed for GSI (Rancic et al. 2012).
24
GSI based 4DENSVAR

2525
4DENSVAR performance:Test with GFS at reduced resolution
2010 hurricane track forecast Anomaly correlation for height
Lei, Wang, Kleist, Whitaker, 2013







