Download - General Linear Cameras with Finite Aperture Andrew Adams and Marc Levoy Stanford University
General Linear Cameras with Finite Aperture
Andrew Adams and Marc LevoyStanford University
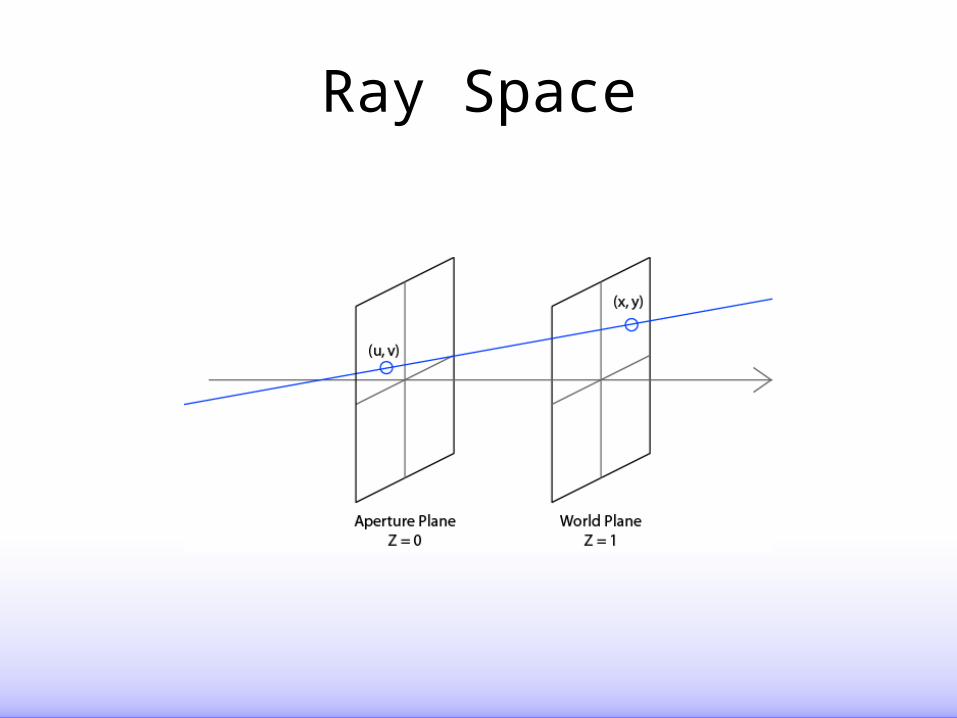
Ray Space
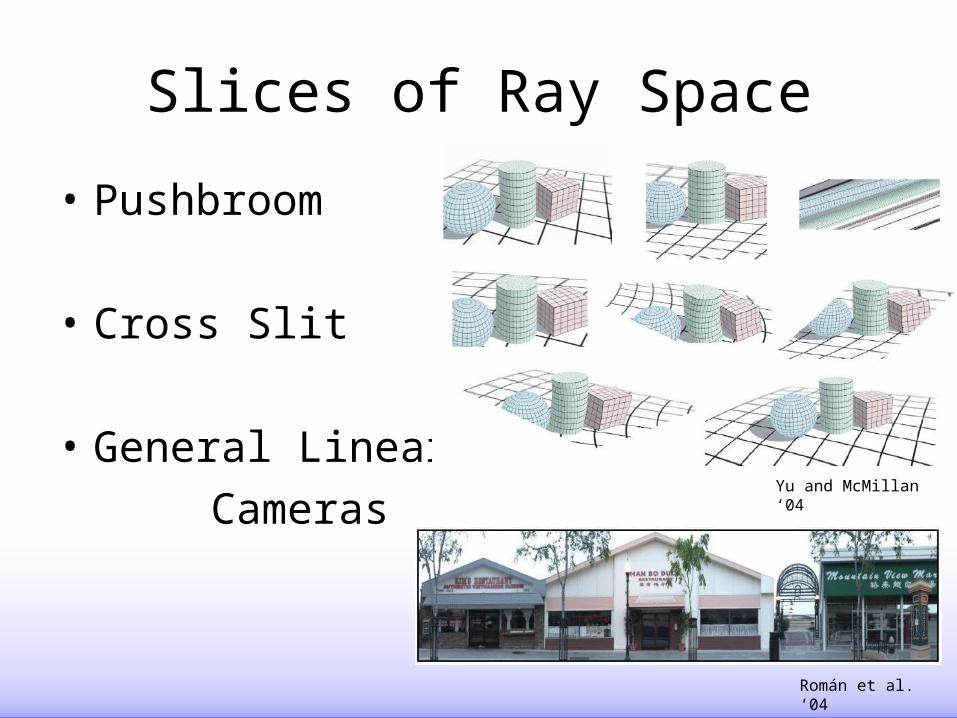
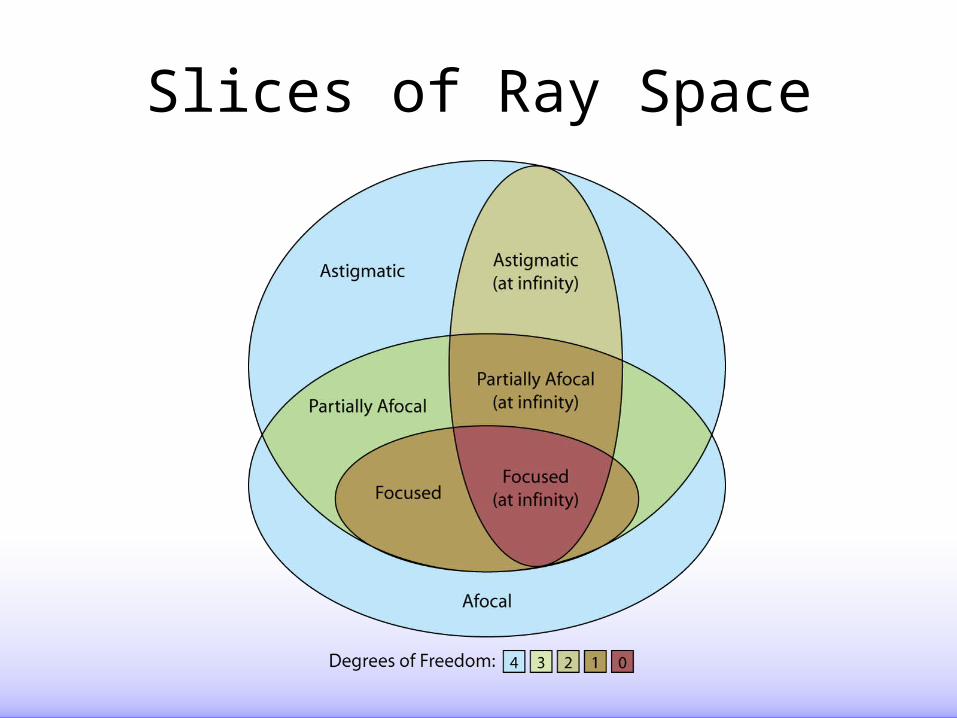
Slices of Ray Space
• Pushbroom
• Cross Slit
• General Linear Cameras
Yu and McMillan ‘04
Román et al. ‘04
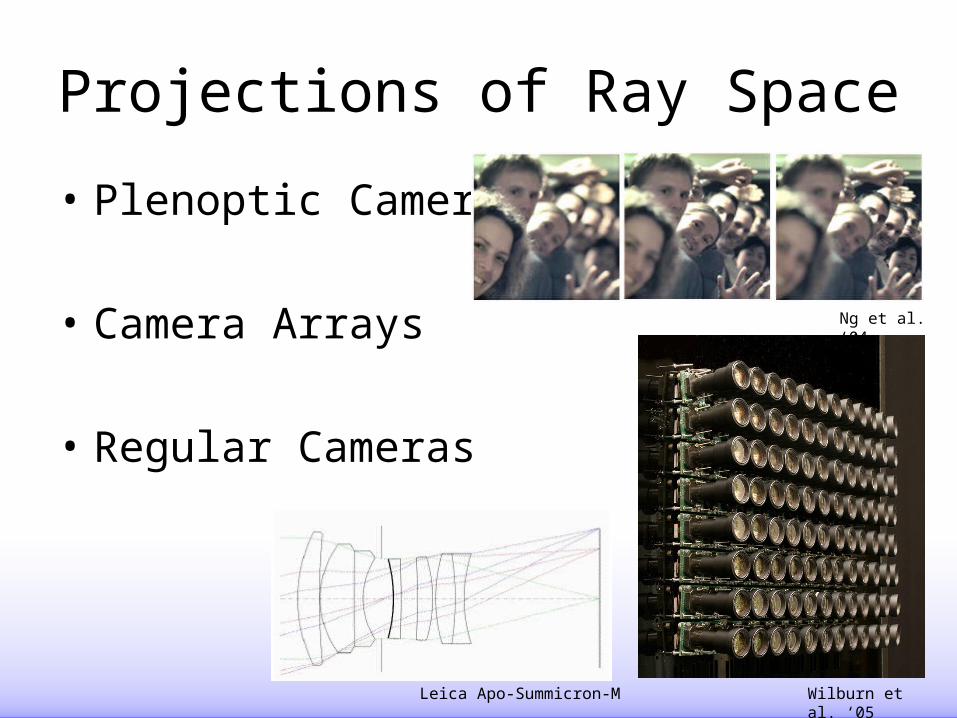
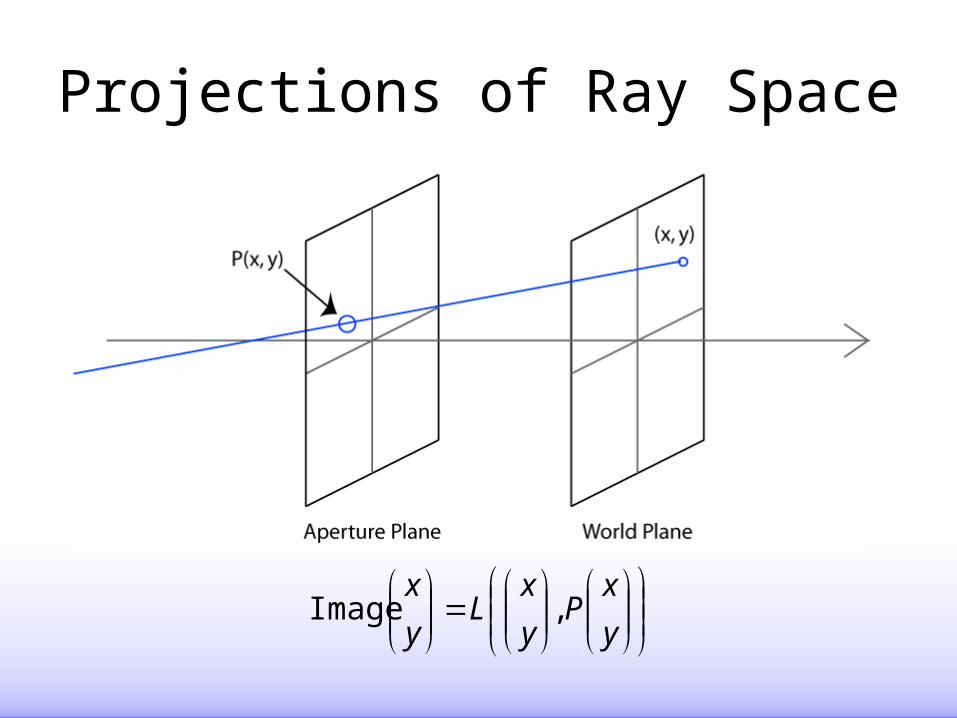
Projections of Ray Space
• Plenoptic Cameras
• Camera Arrays
• Regular Cameras
Ng et al. ‘04
Wilburn et al. ‘05Leica Apo-Summicron-M
What is this paper?
What is this paper?
• An intuitive reformulation of general linear cameras in terms of eigenvectors
What is this paper?
• An intuitive reformulation of general linear cameras in terms of eigenvectors
• An analogous description of focus
What is this paper?
• An intuitive reformulation of general linear cameras in terms of eigenvectors
• An analogous description of focus
• A theoretical framework for understanding and characterizing linear slices and integral projections of ray space
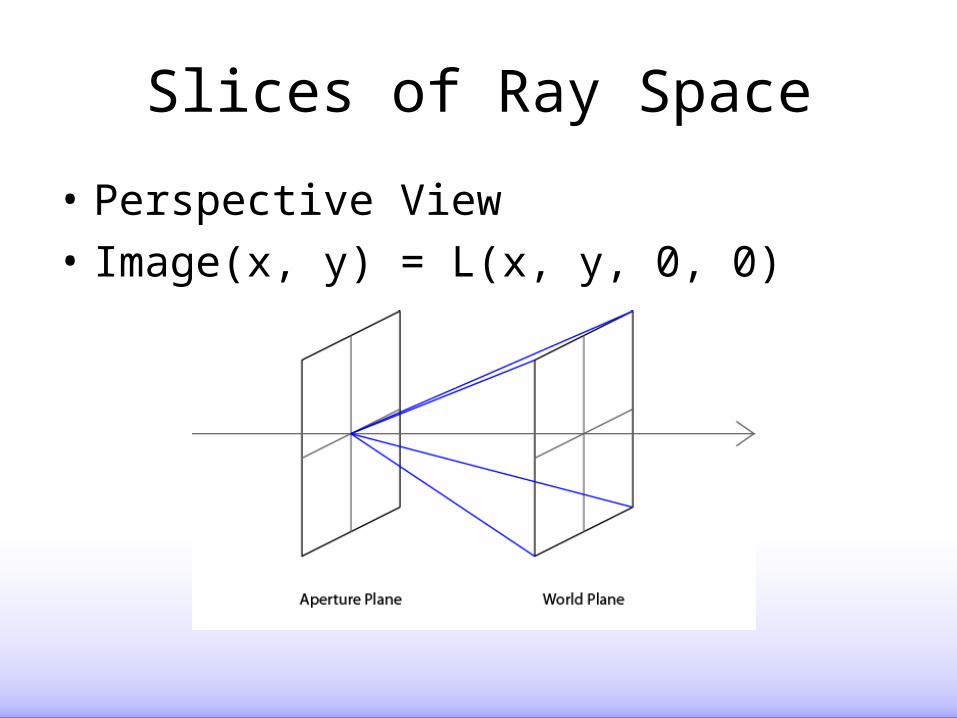
Slices of Ray Space
• Perspective View• Image(x, y) = L(x, y, 0, 0)
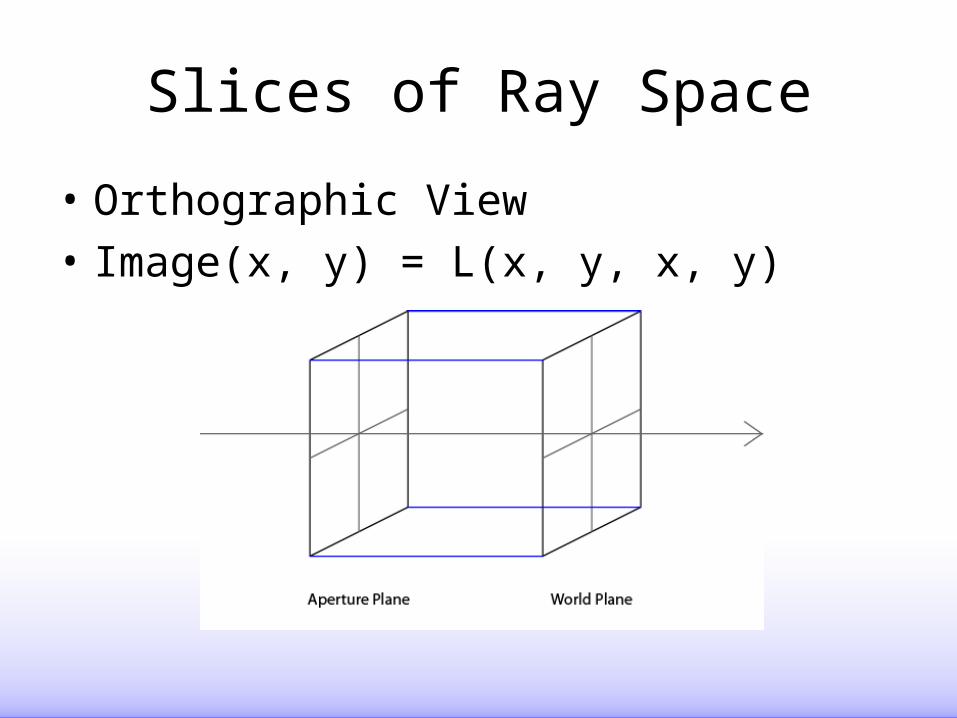
Slices of Ray Space
• Orthographic View• Image(x, y) = L(x, y, x, y)
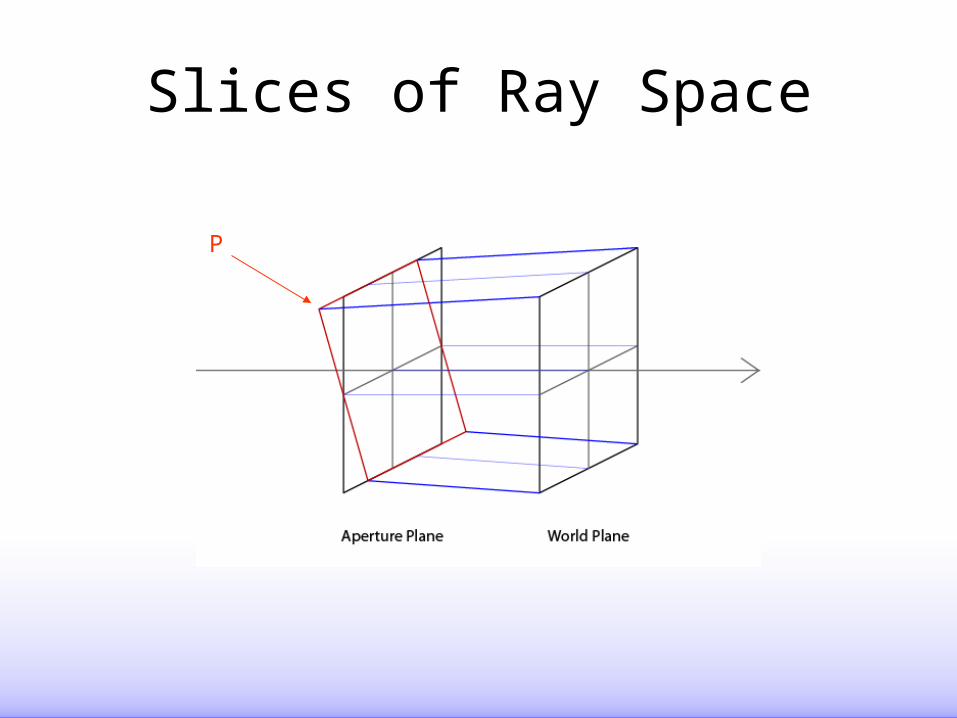
Slices of Ray Space
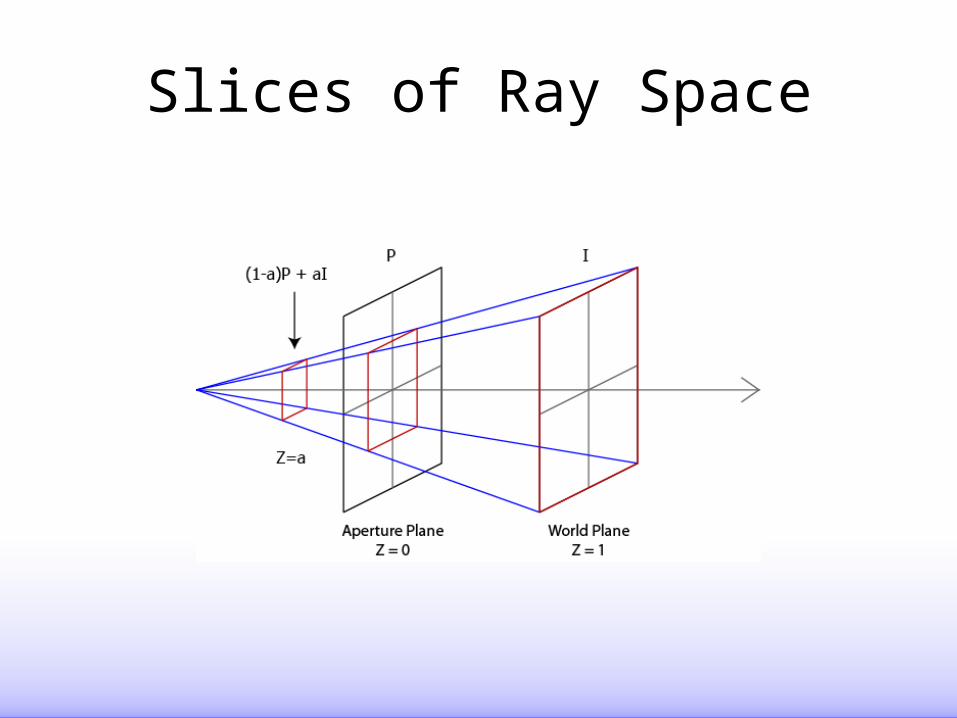
• Image(x, y) = L(x, y, P(x, y))
• P determines perspective
• Let’s assume P is linear
Slices of Ray Space
P
Slices of Ray Space
Slices of Ray Space
• Rays meet when:
((1-z)P + zI) is low rank
• Substitute b = z/(z-1):
((1-z)P + zI) = (1-z)(P – bI)
• Rays meet when:
(P – bI) is low rank
Slices of Ray Space
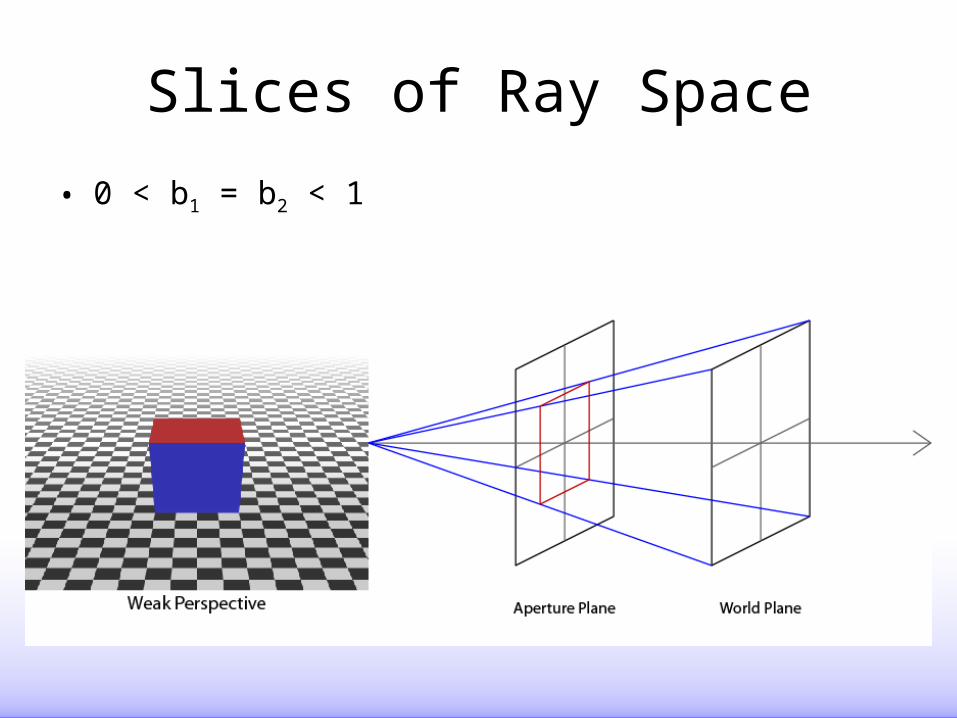
• 0 < b1 = b2 < 1
Slices of Ray Space
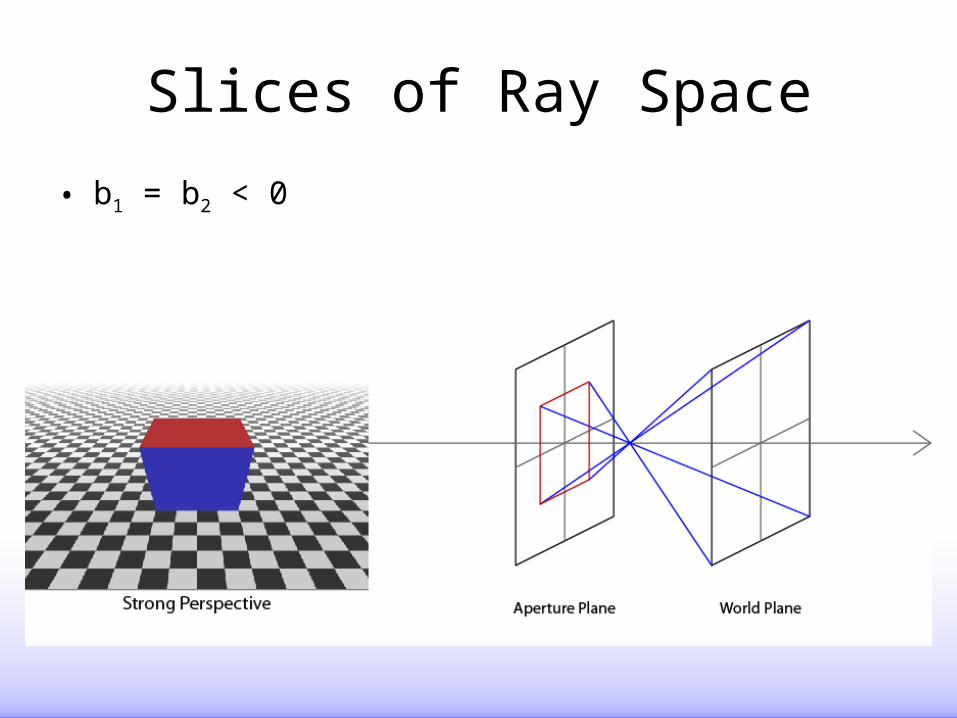
• b1 = b2 < 0
Slices of Ray Space
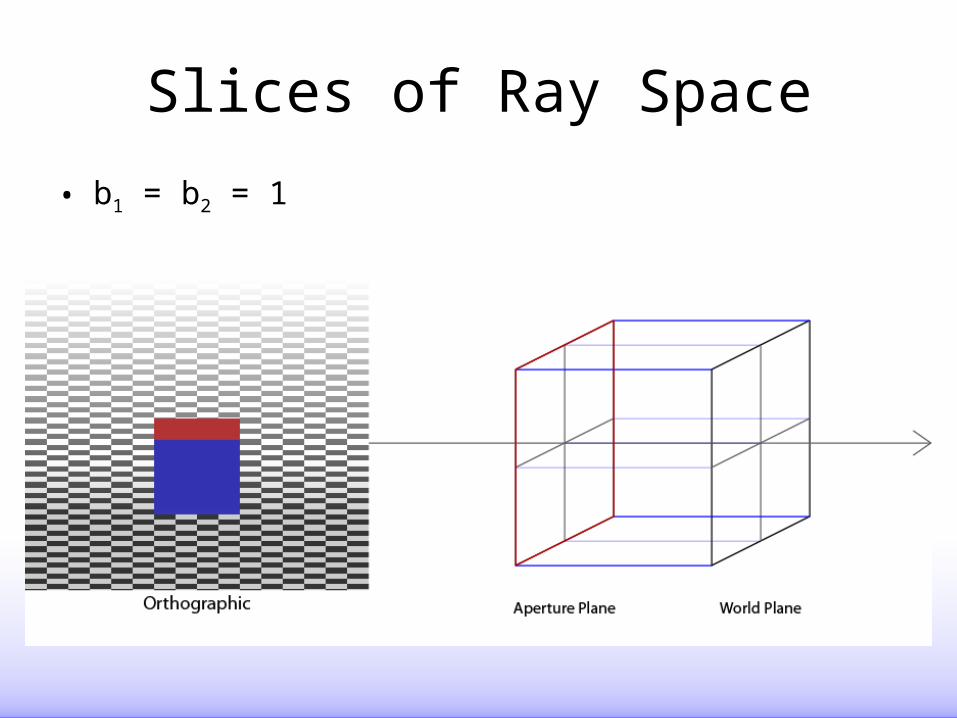
• b1 = b2 = 1
Slices of Ray Space
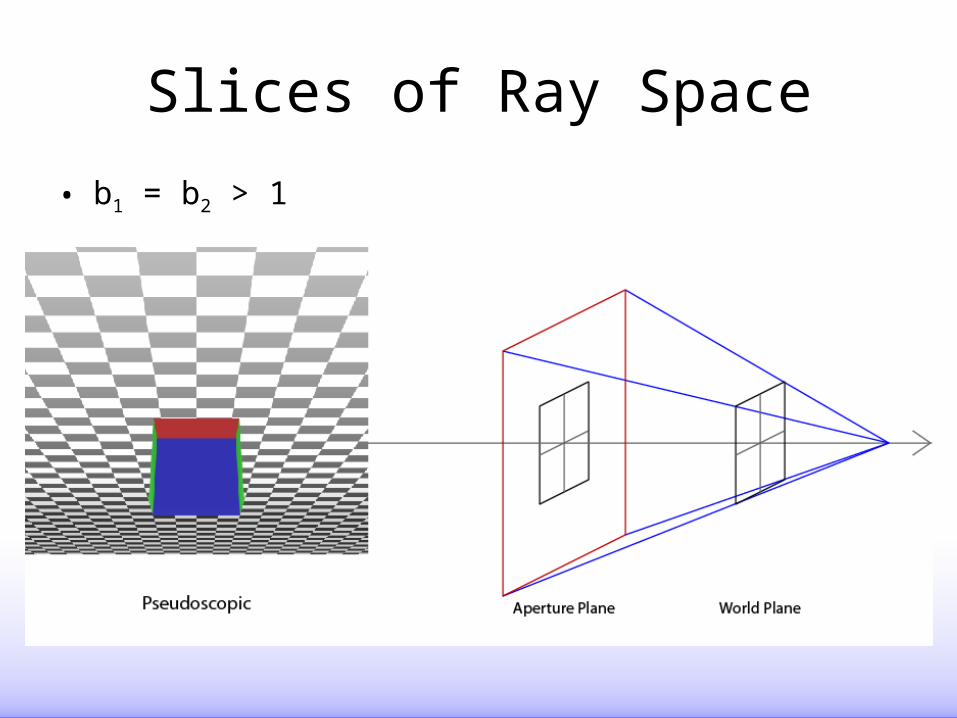
• b1 = b2 > 1
Slices of Ray Space
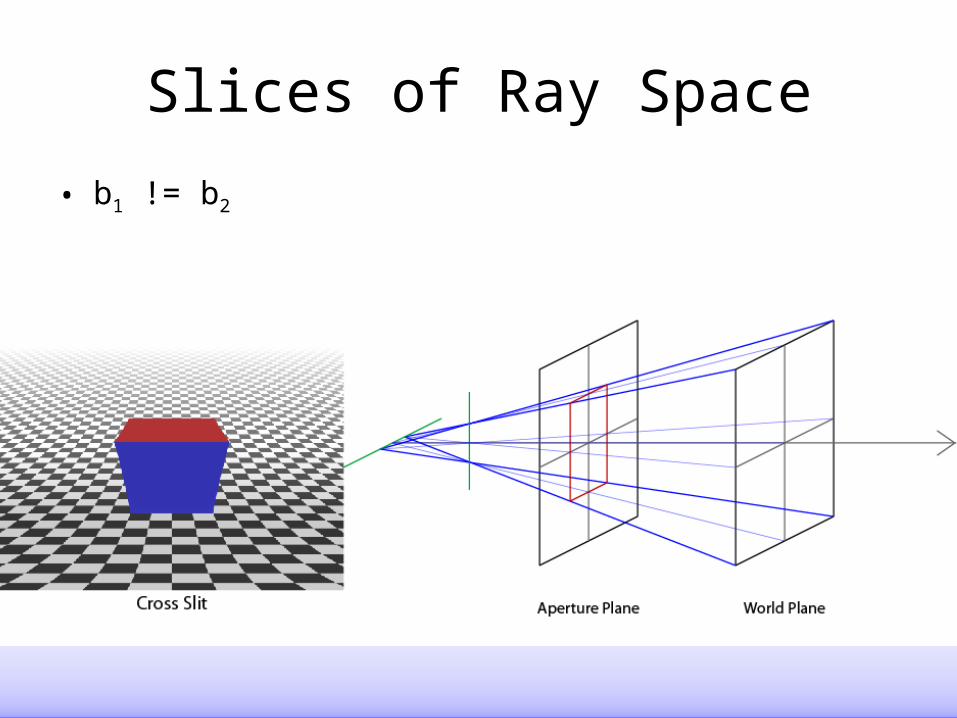
• b1 != b2
Slices of Ray Space
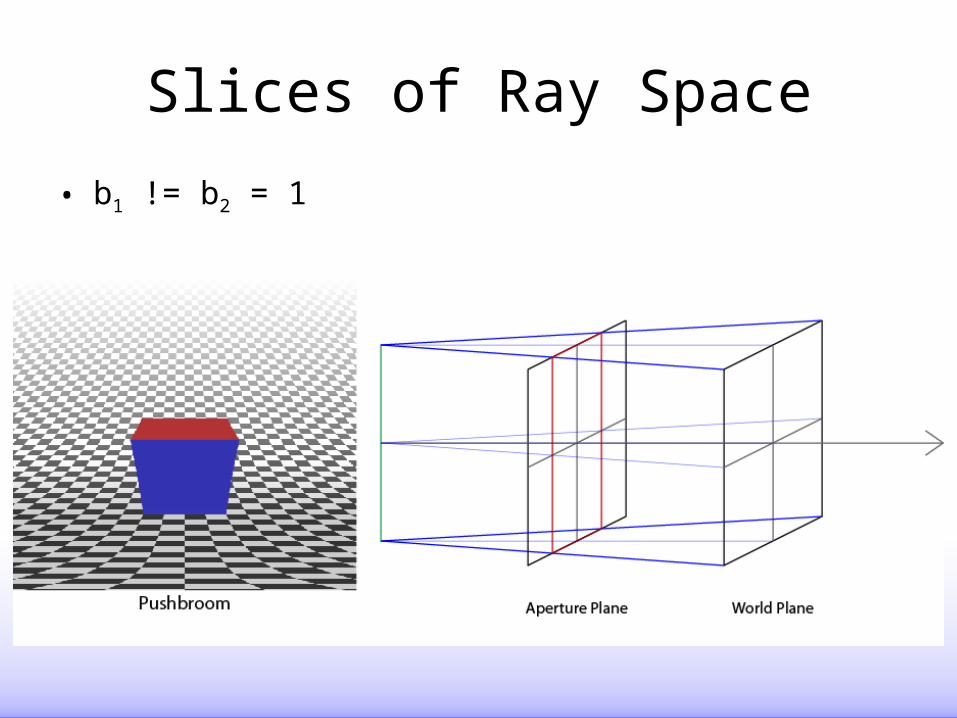
• b1 != b2 = 1
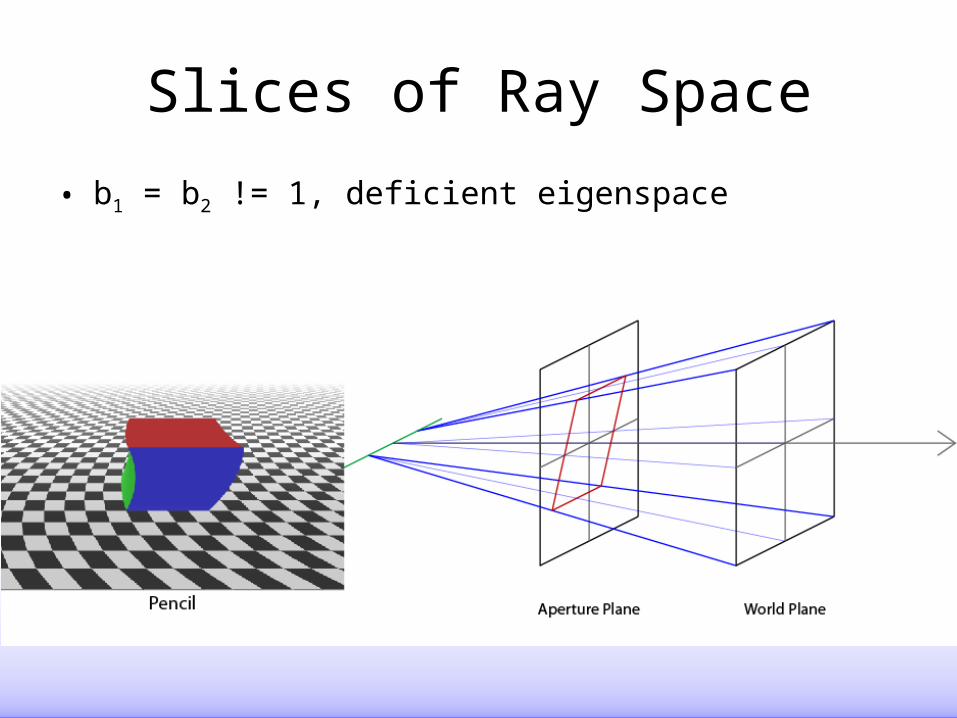
Slices of Ray Space
• b1 = b2 != 1, deficient eigenspace
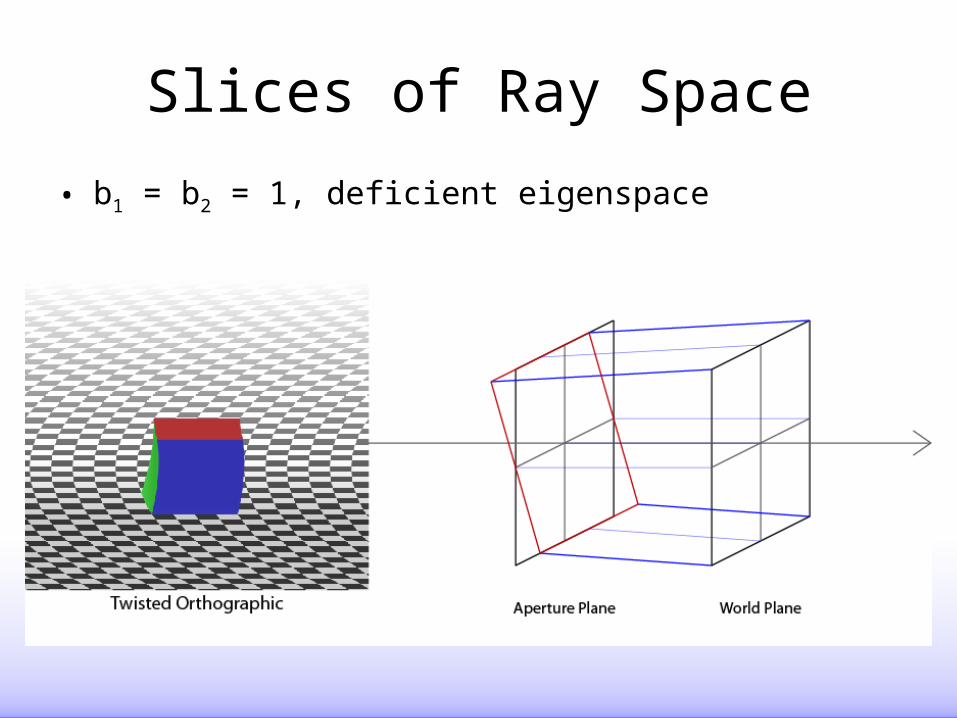
Slices of Ray Space
• b1 = b2 = 1, deficient eigenspace
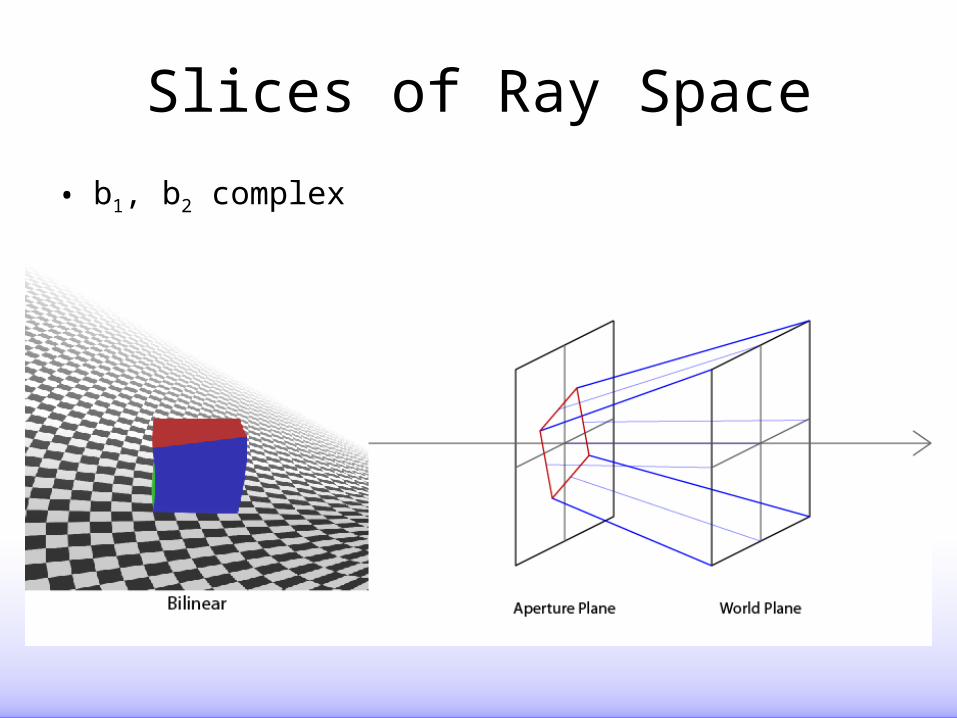
Slices of Ray Space
• b1, b2 complex
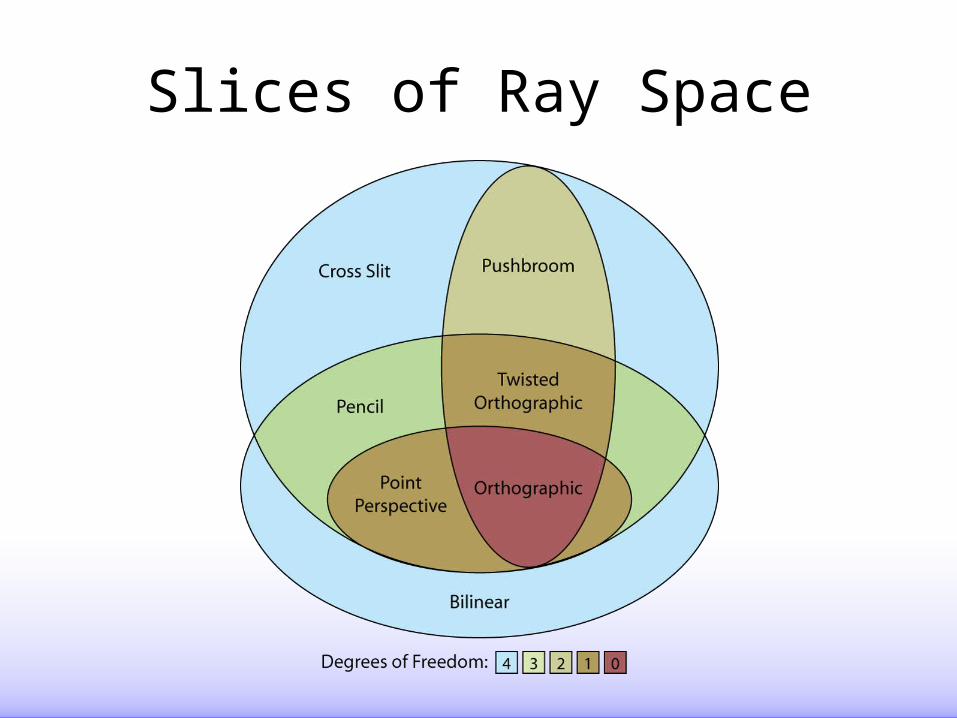
Slices of Ray Space
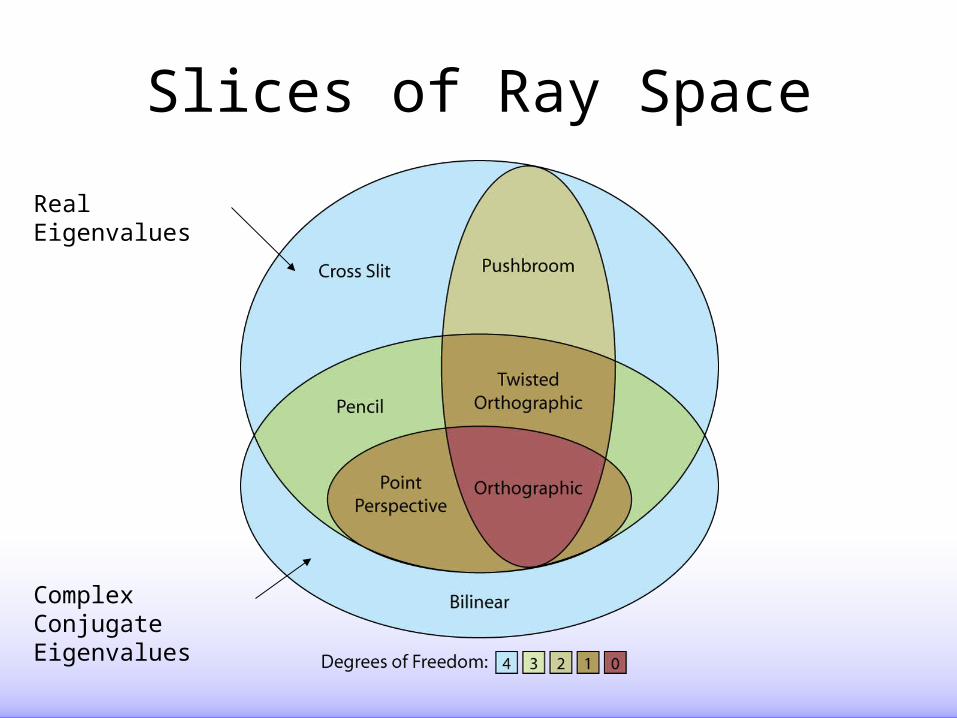
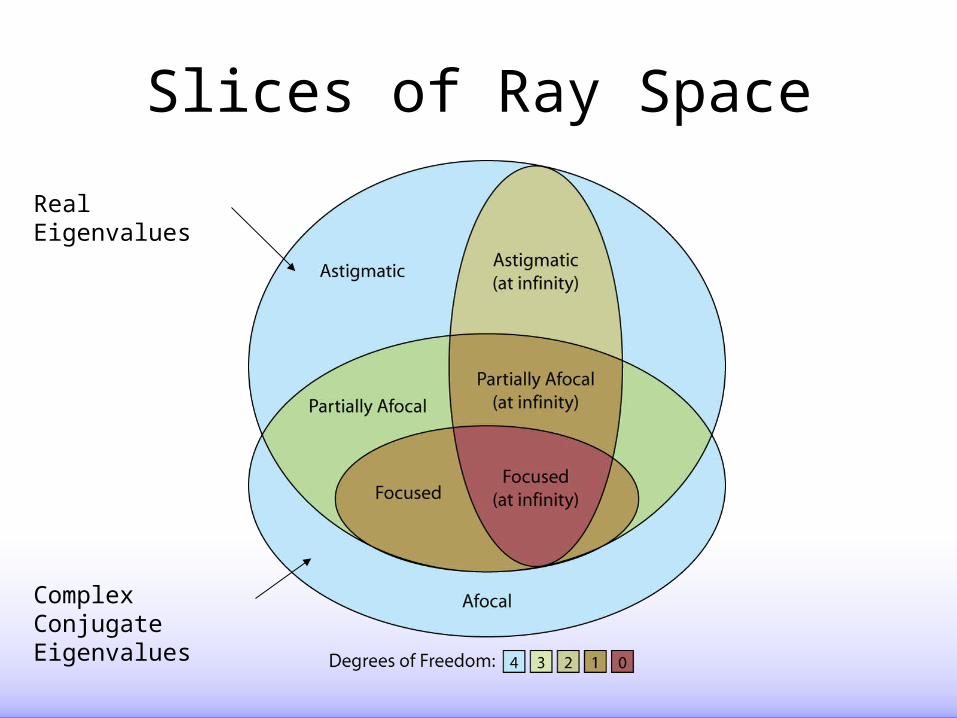
Slices of Ray Space
Real Eigenvalues
Complex Conjugate Eigenvalues
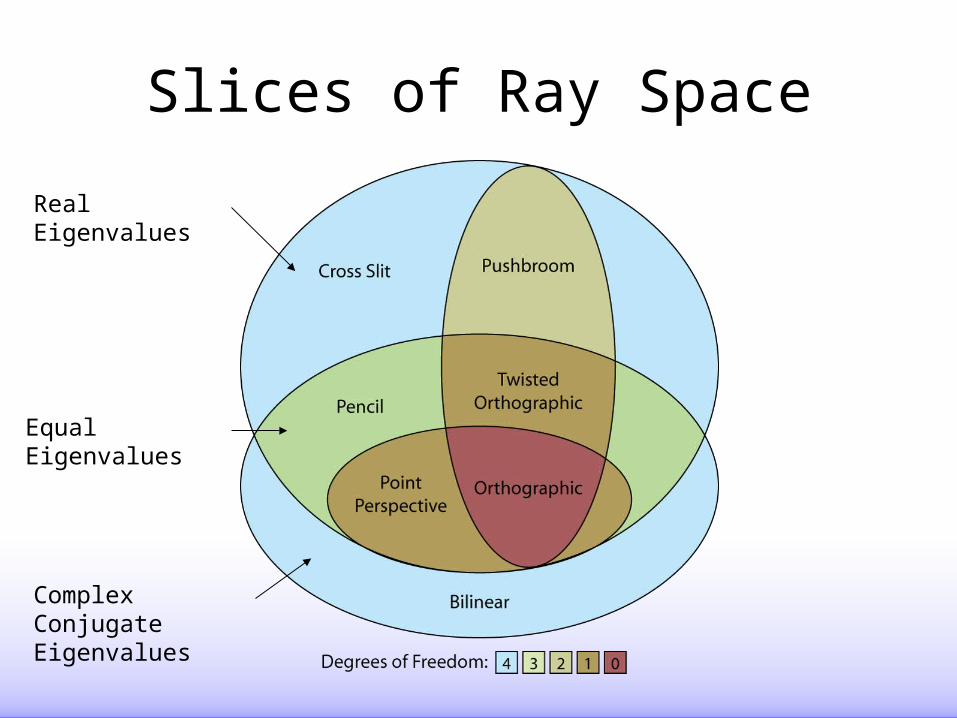
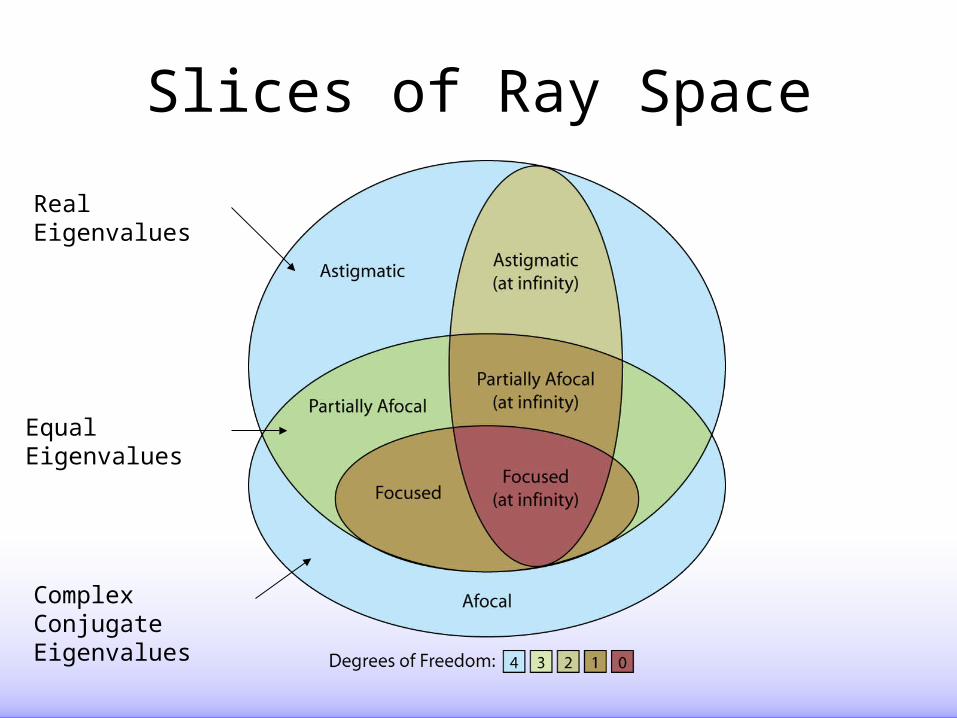
Slices of Ray Space
Real Eigenvalues
Complex Conjugate Eigenvalues
Equal Eigenvalues
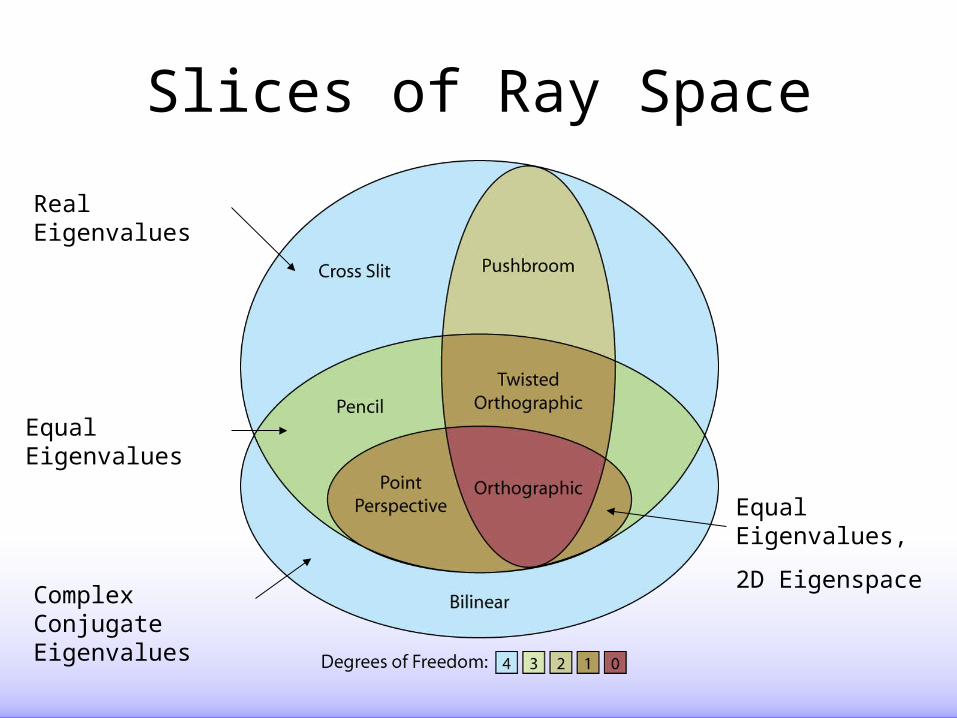
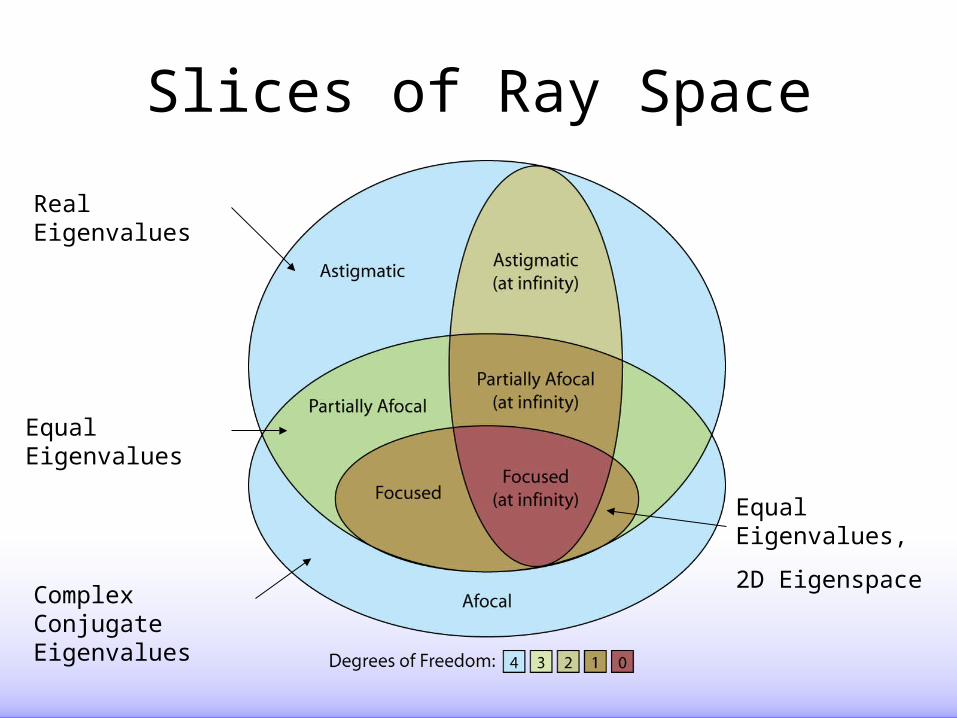
Slices of Ray Space
Real Eigenvalues
Complex Conjugate Eigenvalues
Equal Eigenvalues
Equal Eigenvalues,
2D Eigenspace
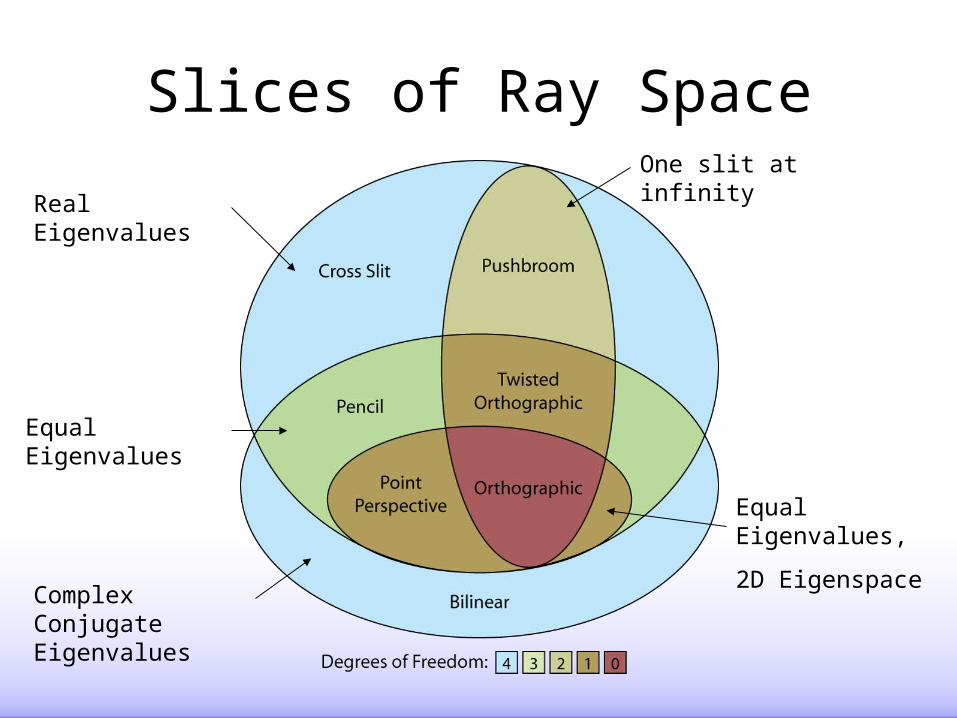
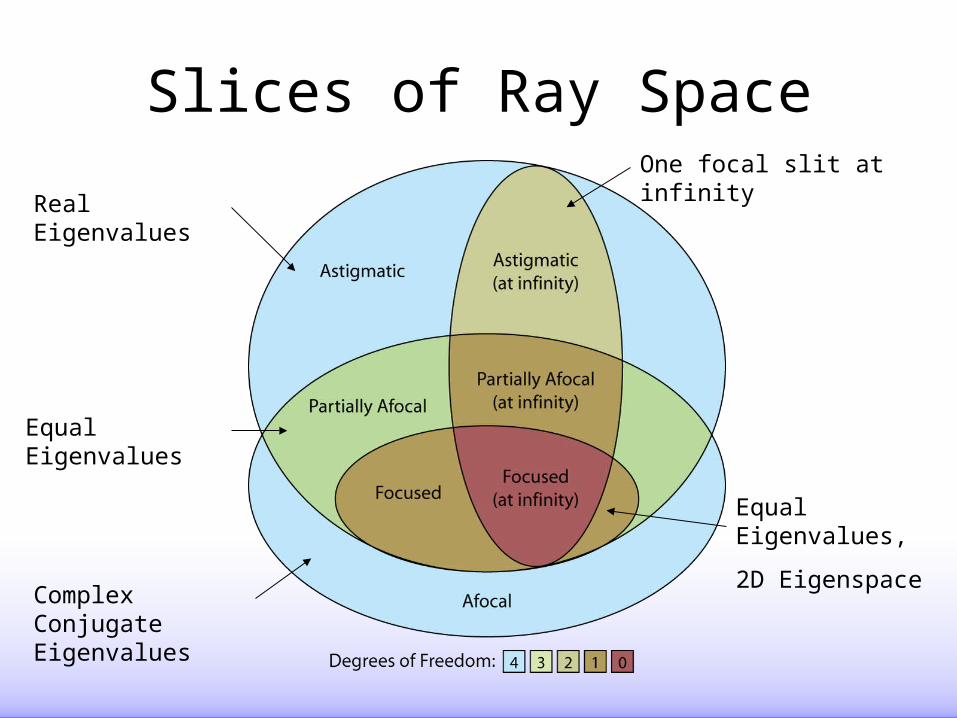
Slices of Ray Space
Real Eigenvalues
Complex Conjugate Eigenvalues
Equal Eigenvalues
One slit at infinity
Equal Eigenvalues,
2D Eigenspace
Projections of Ray Space
y
xP
y
xL
y
x,Image
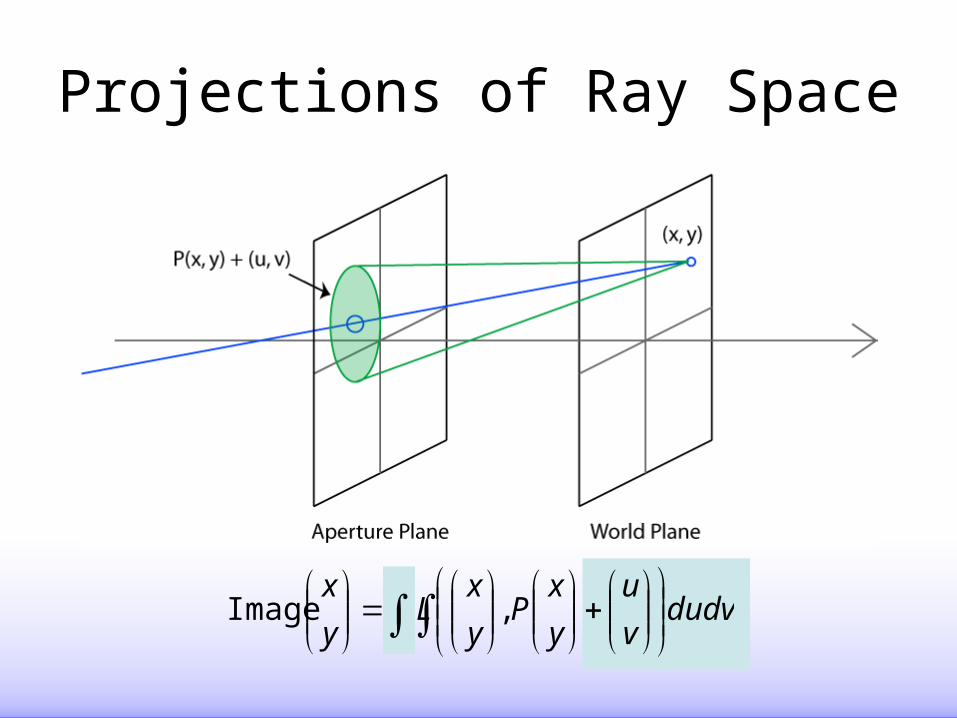
Projections of Ray Space
dudvv
u
y
xP
y
xL
y
x
,Image
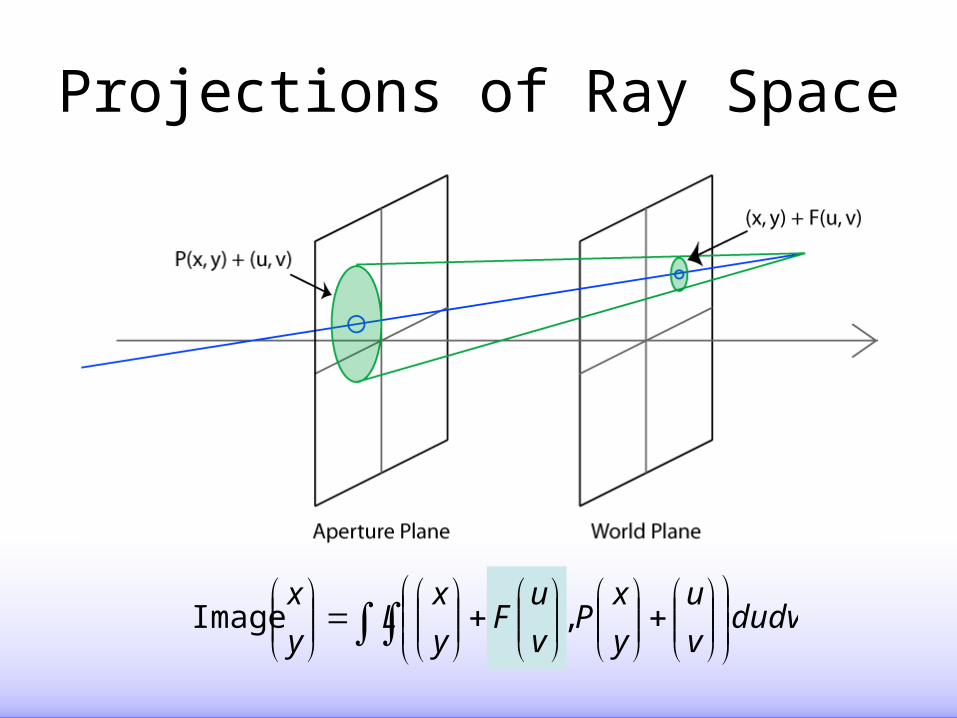
Projections of Ray Space
dudvv
u
y
xP
v
uF
y
xL
y
x
,Image
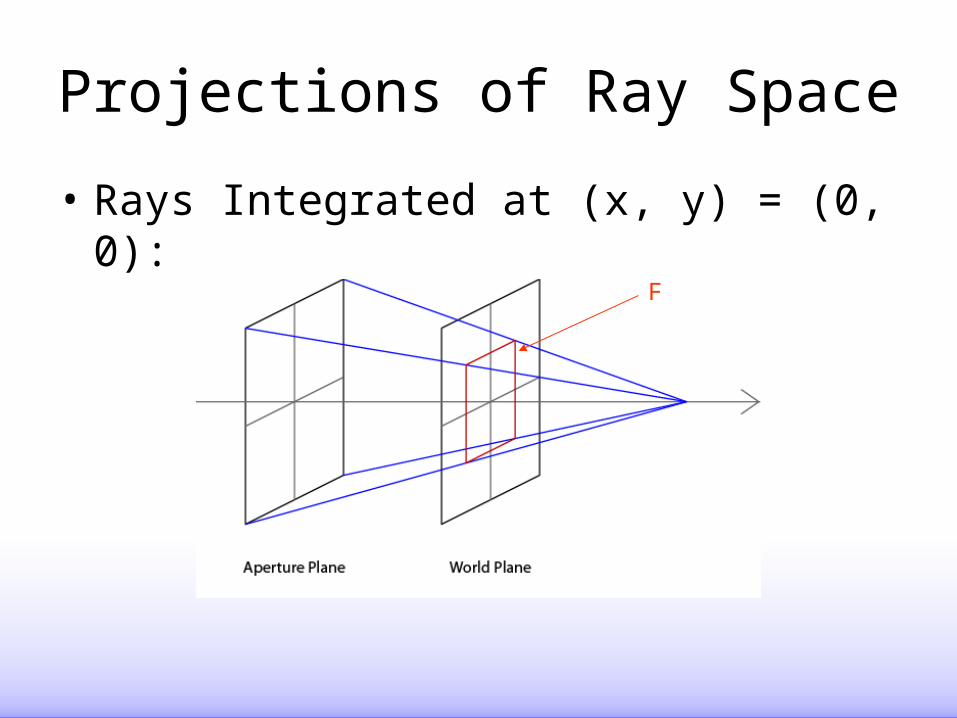
Projections of Ray Space
• Rays Integrated at (x, y) = (0, 0):
F
Projections of Ray Space
• Rays meet when:
((1-z)I + zF) is low rank
• Substitute b = (z-1)/z:
((1-z)I + zF) = z(F – bI)
• Rays meet when:
(F – bI) is low rank
Projections of Ray Space
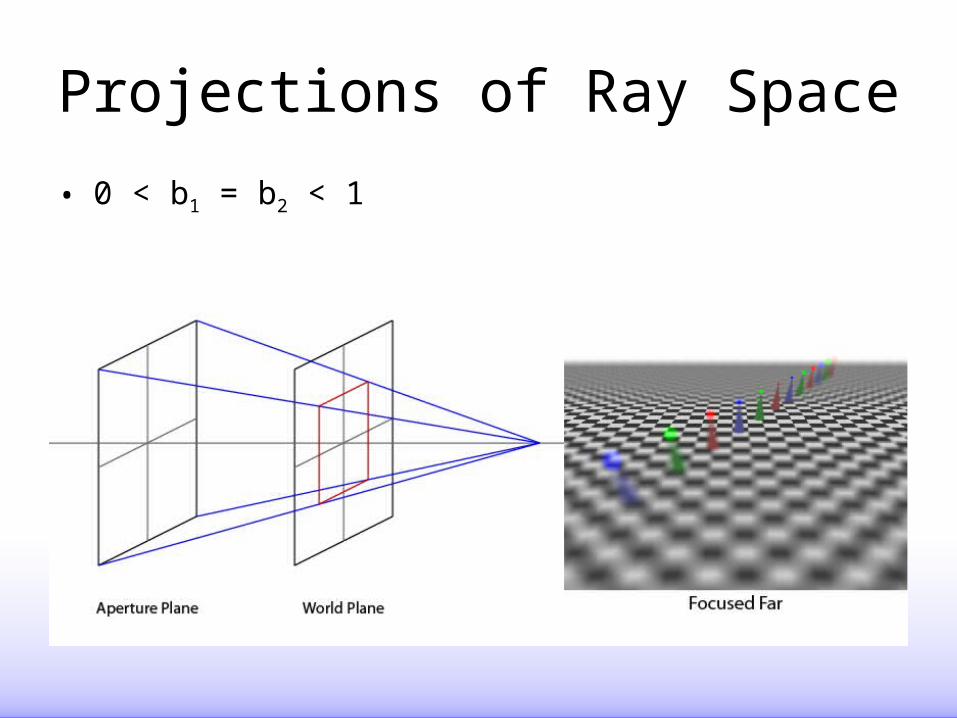
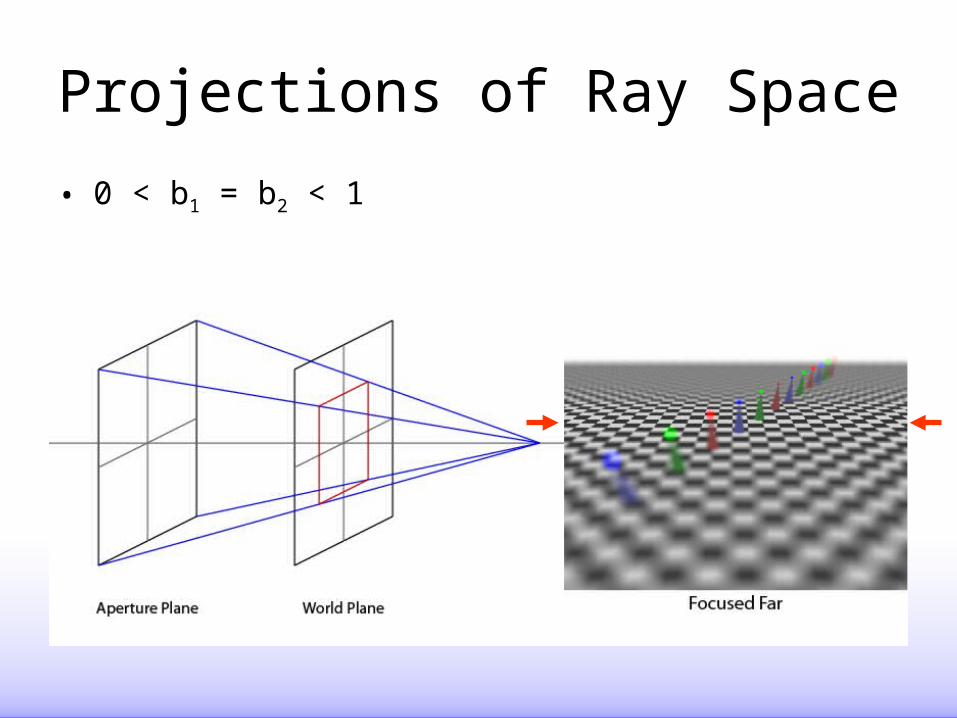
• 0 < b1 = b2 < 1
Projections of Ray Space
• 0 < b1 = b2 < 1
Projections of Ray Space
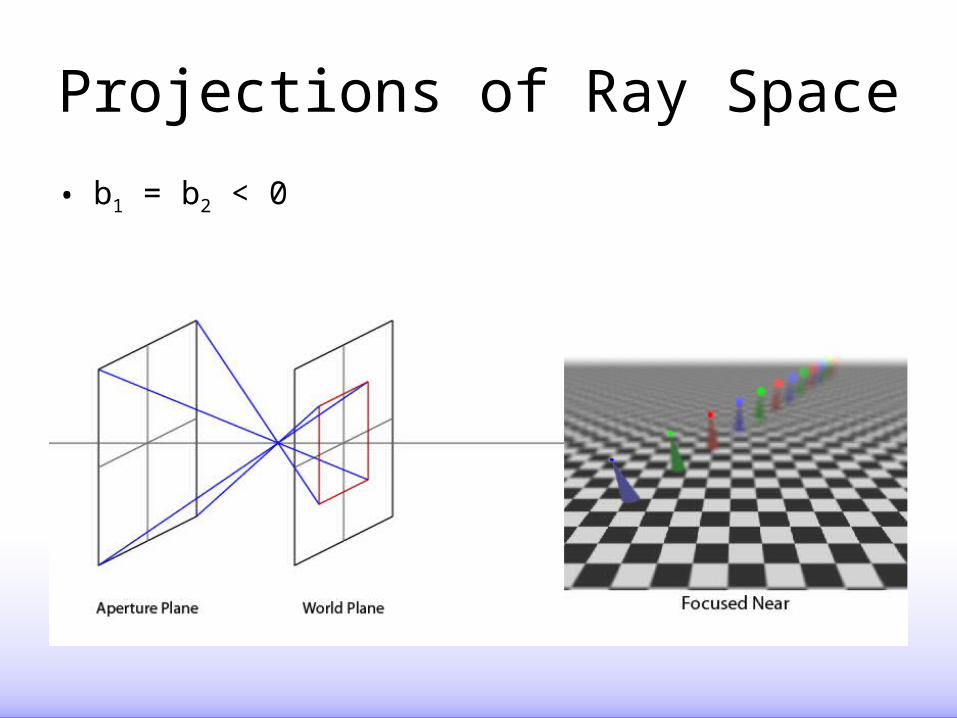
• b1 = b2 < 0
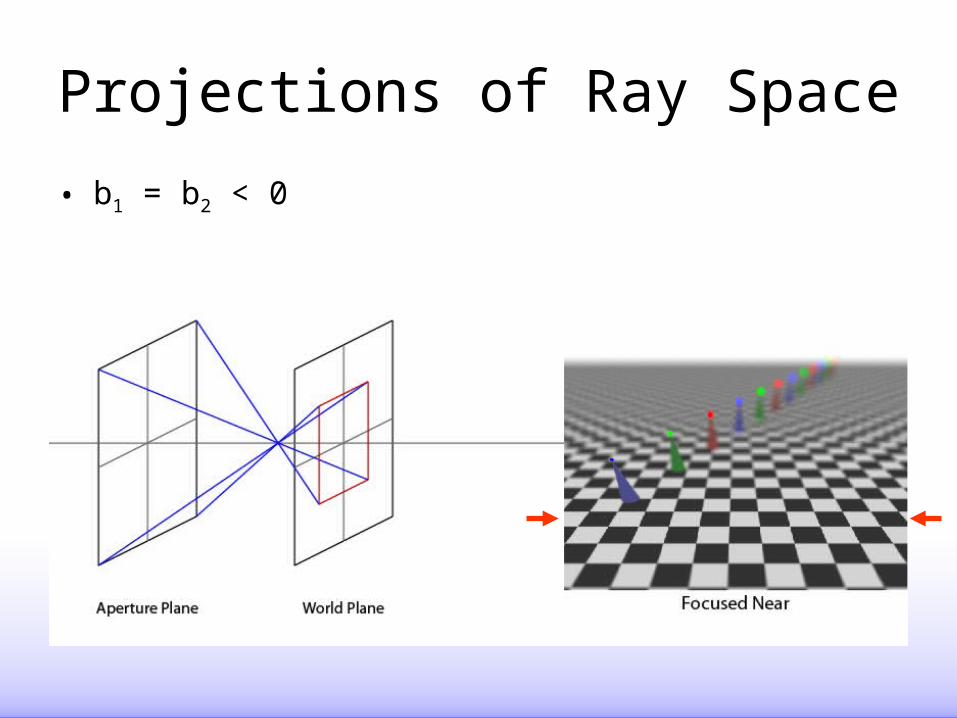
Projections of Ray Space
• b1 = b2 < 0
Projections of Ray Space
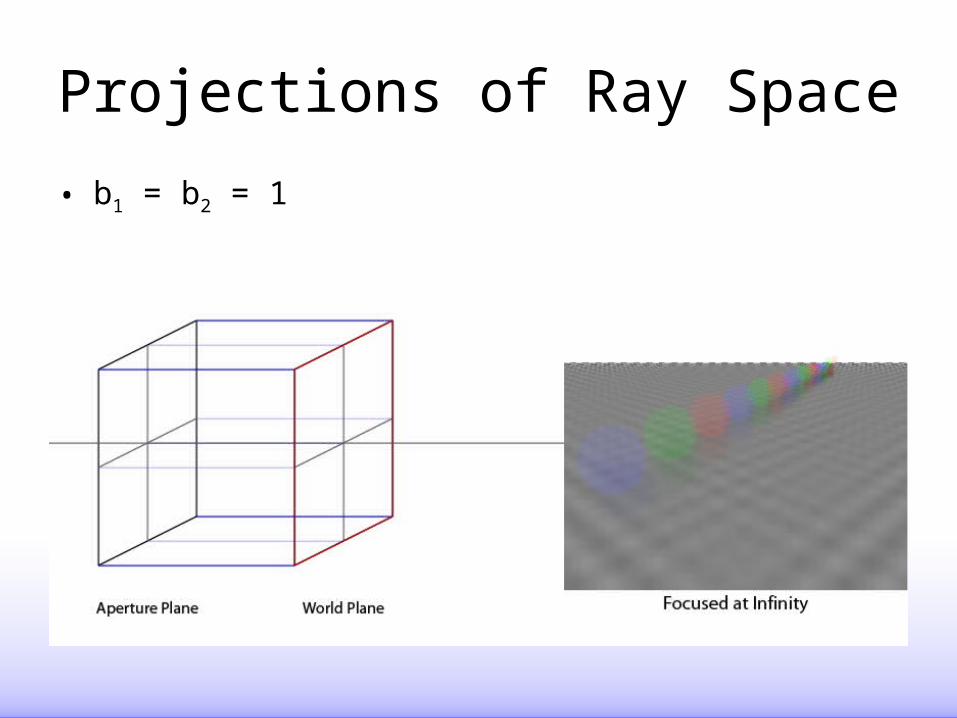
• b1 = b2 = 1
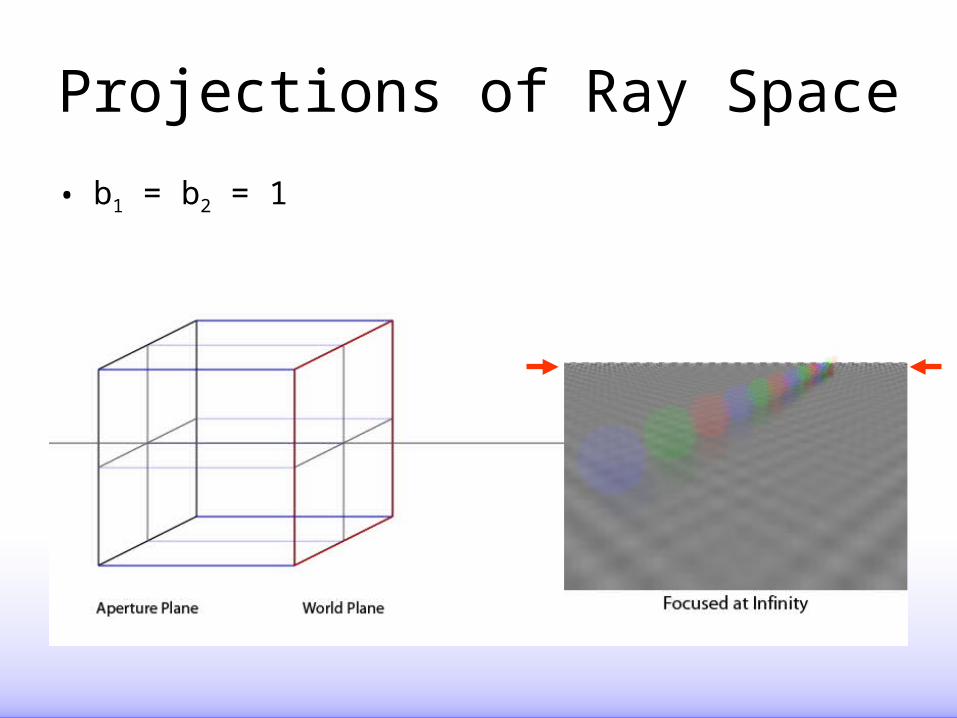
Projections of Ray Space
• b1 = b2 = 1
Projections of Ray Space
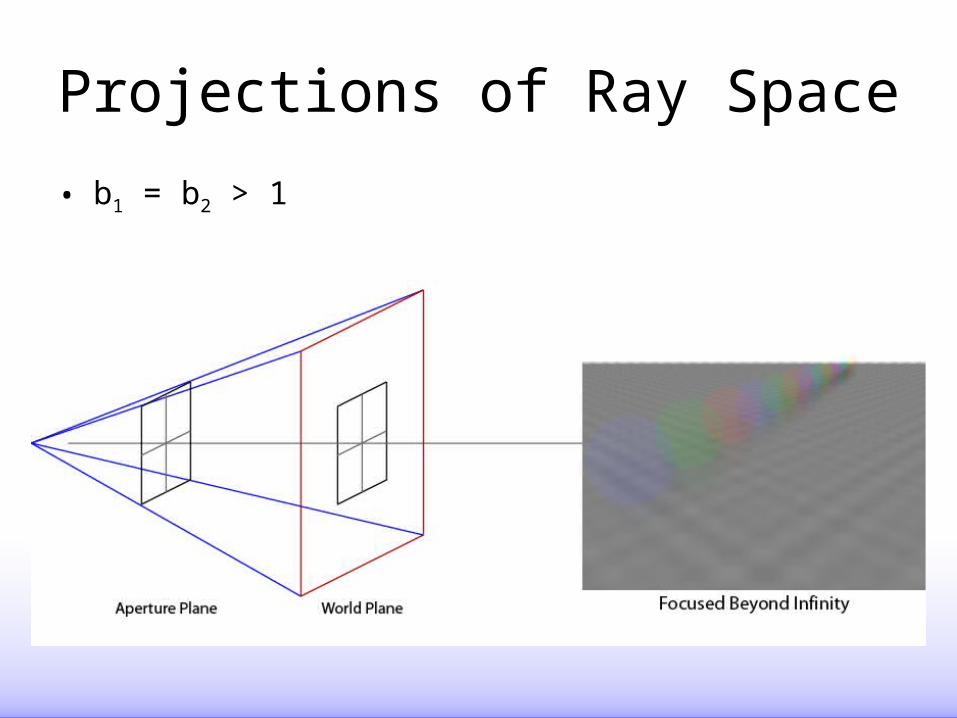
• b1 = b2 > 1
Projections of Ray Space
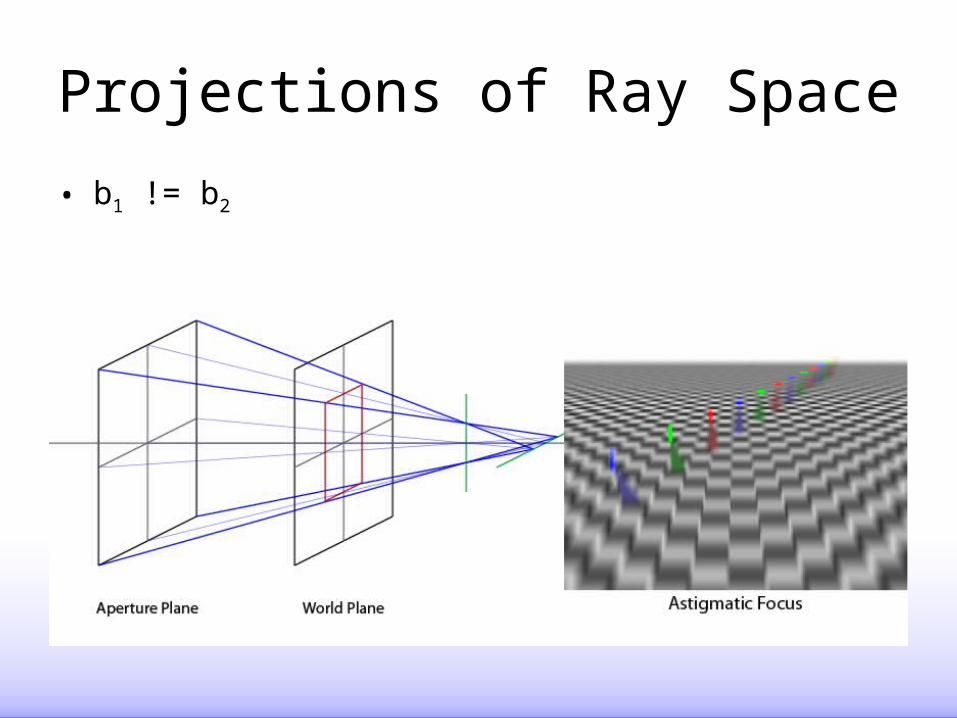
• b1 != b2
Projections of Ray Space
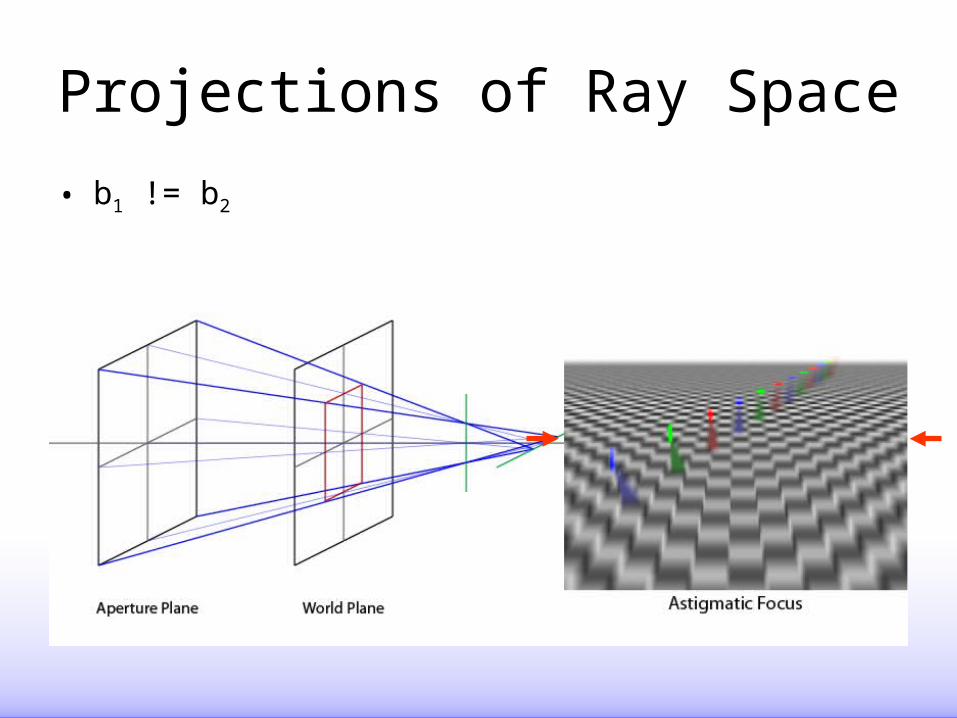
• b1 != b2
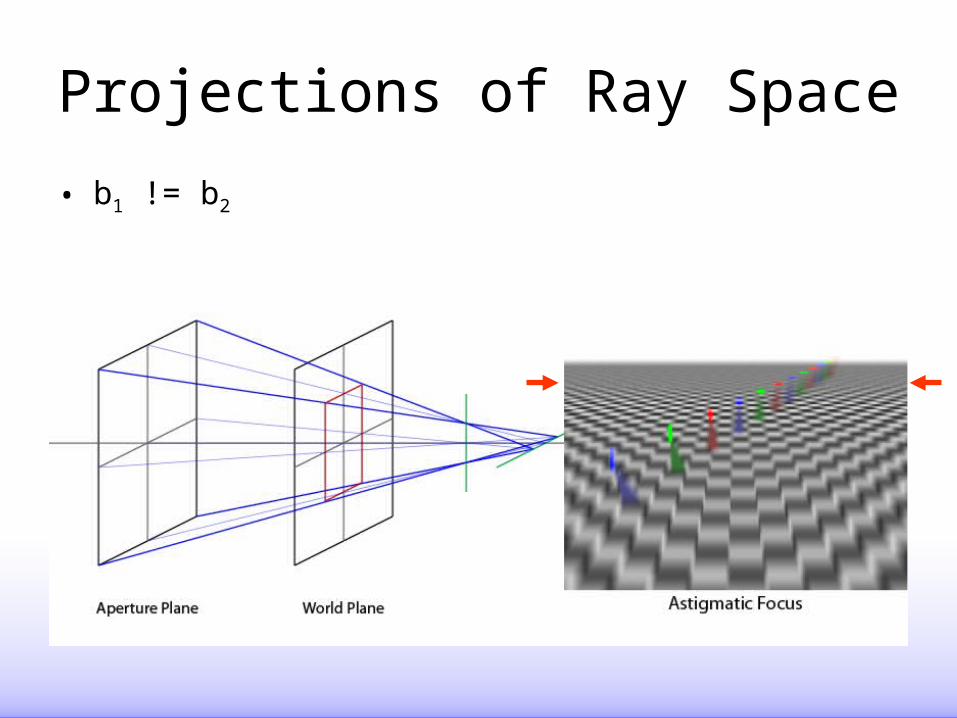
Projections of Ray Space
• b1 != b2
Projections of Ray Space
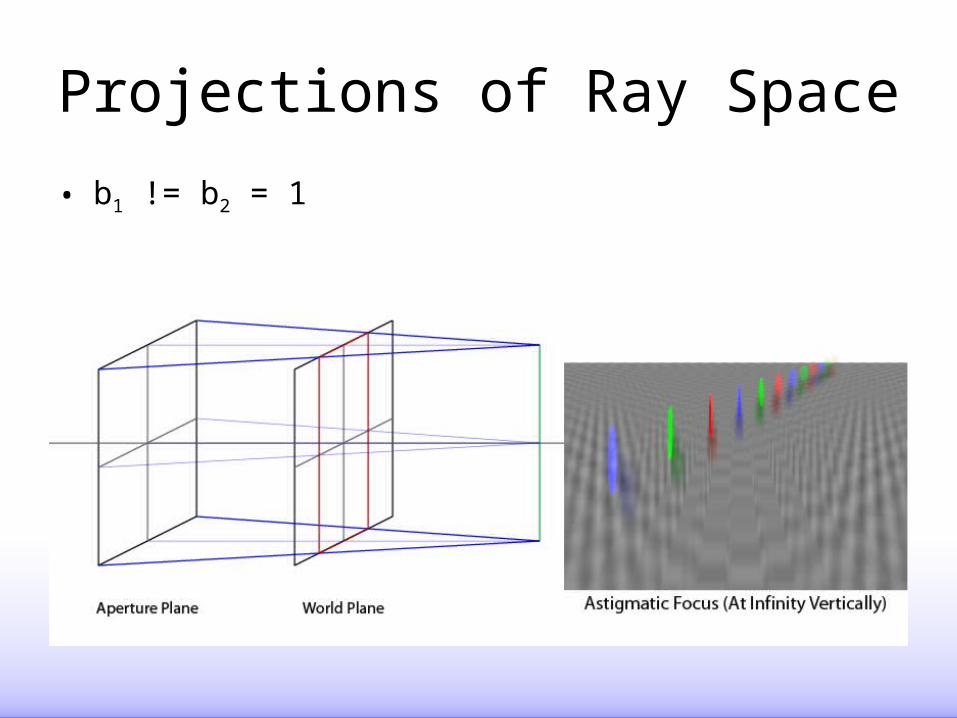
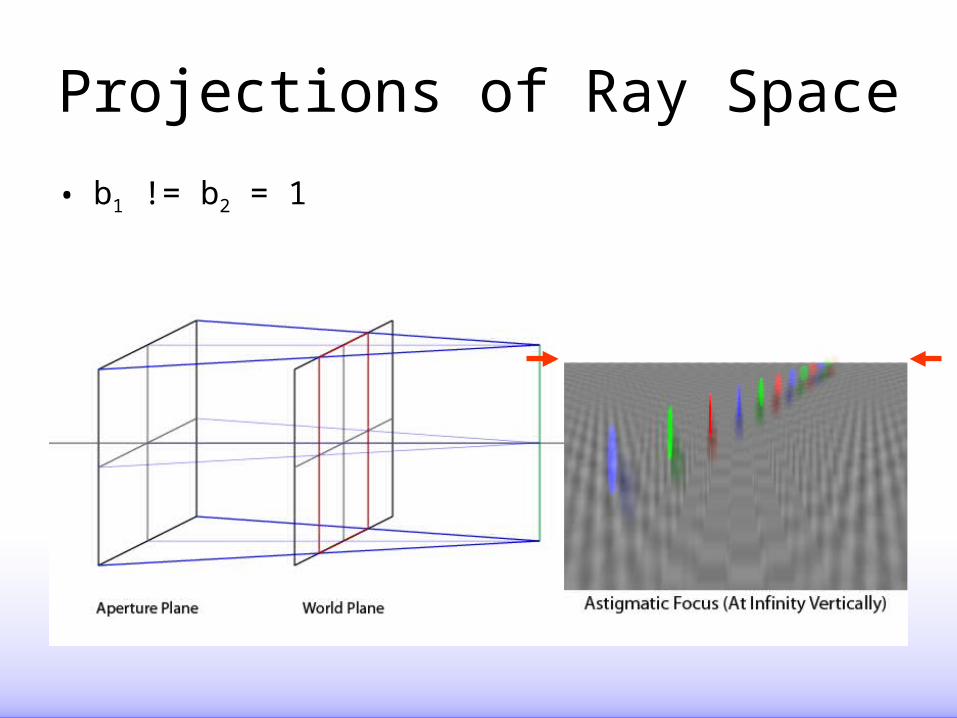
• b1 != b2 = 1
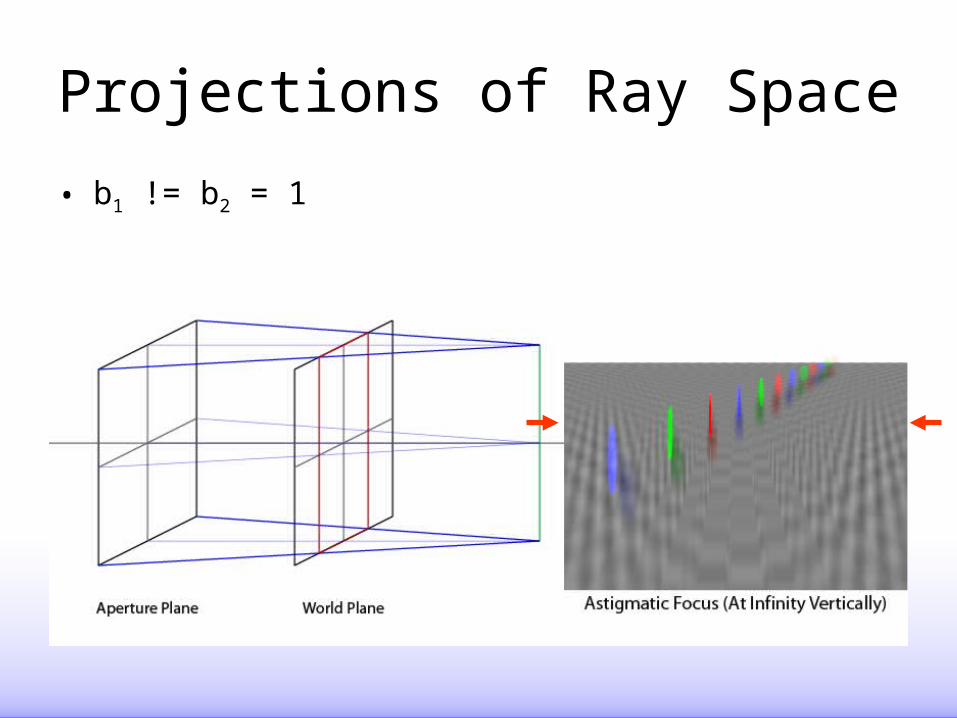
Projections of Ray Space
• b1 != b2 = 1
Projections of Ray Space
• b1 != b2 = 1
Projections of Ray Space
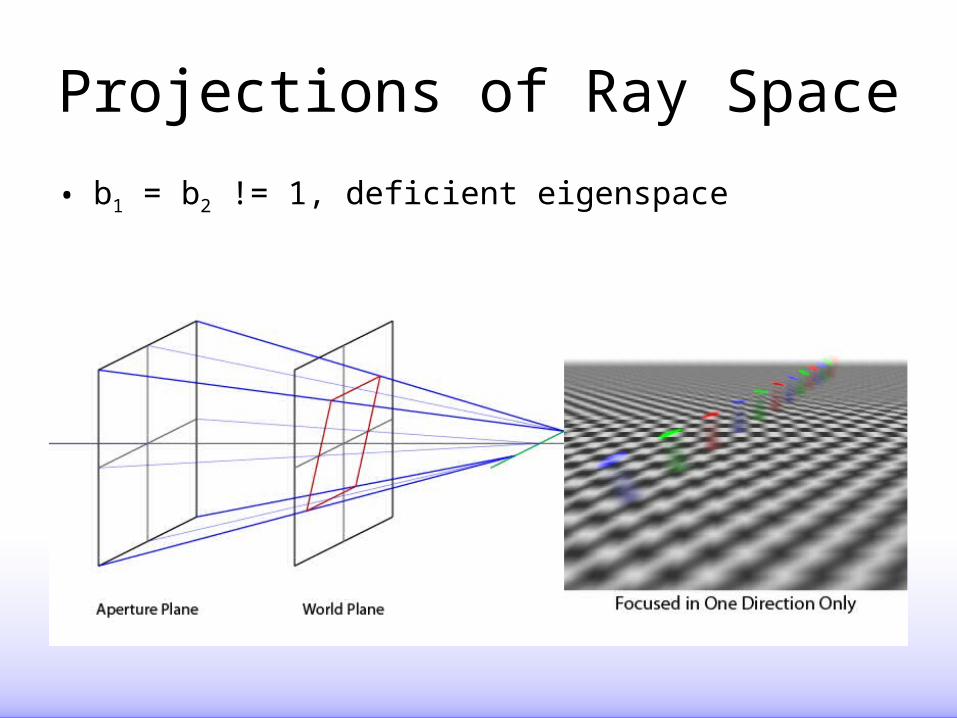
• b1 = b2 != 1, deficient eigenspace
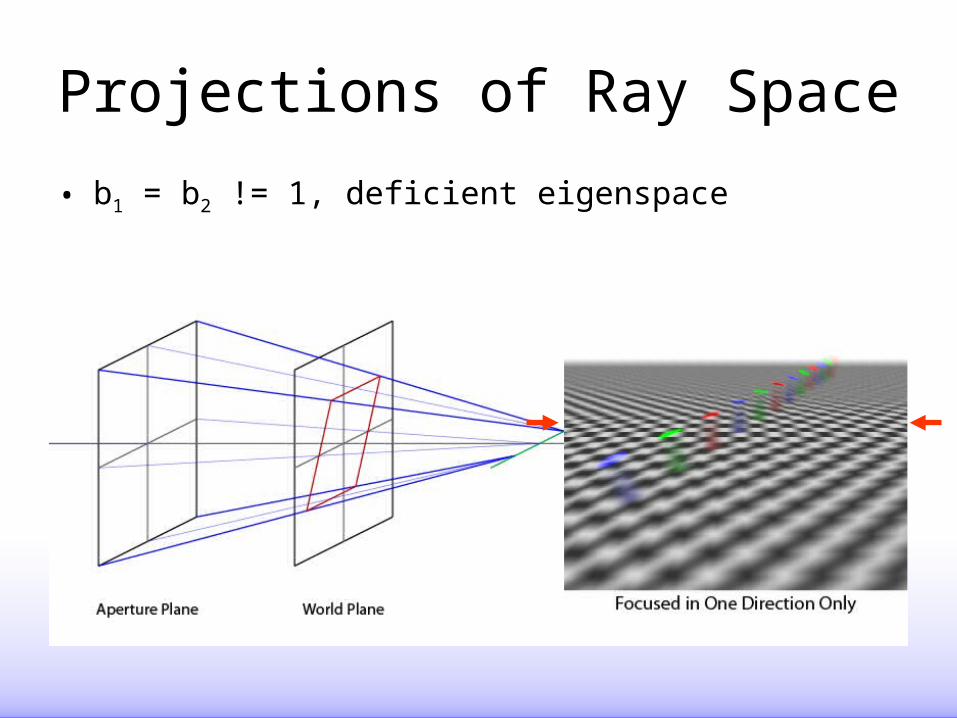
Projections of Ray Space
• b1 = b2 != 1, deficient eigenspace
Projections of Ray Space
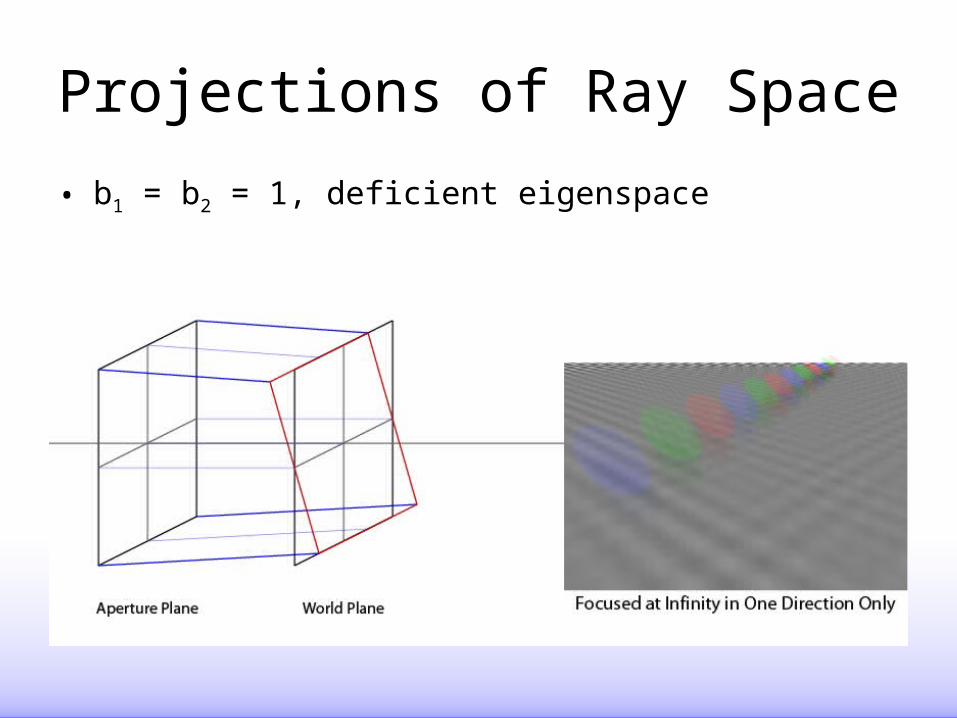
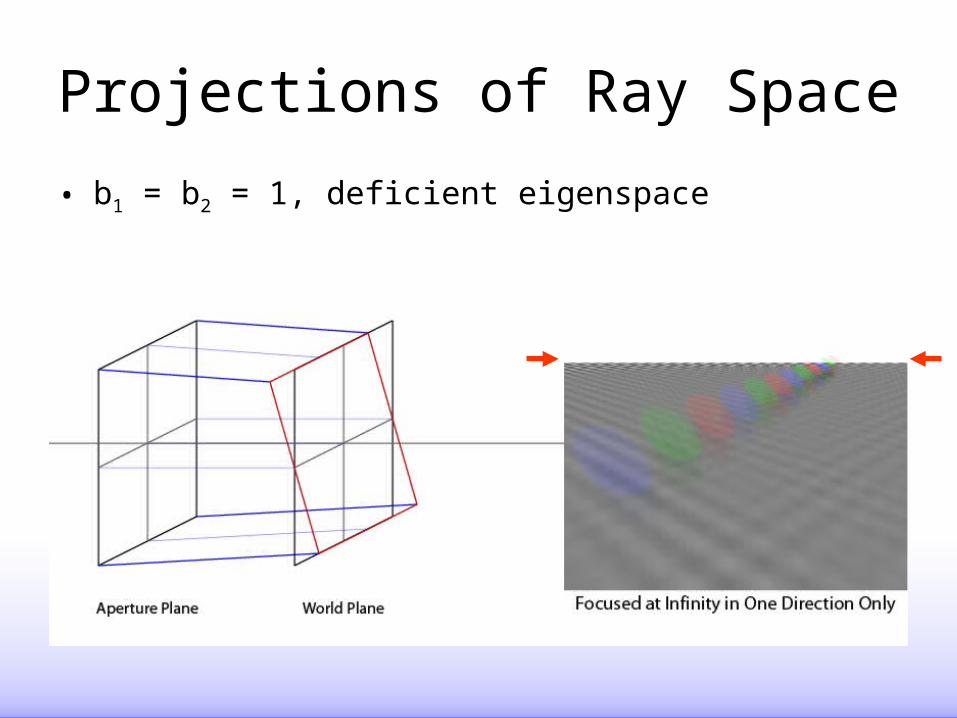
• b1 = b2 = 1, deficient eigenspace
Projections of Ray Space
• b1 = b2 = 1, deficient eigenspace
Projections of Ray Space
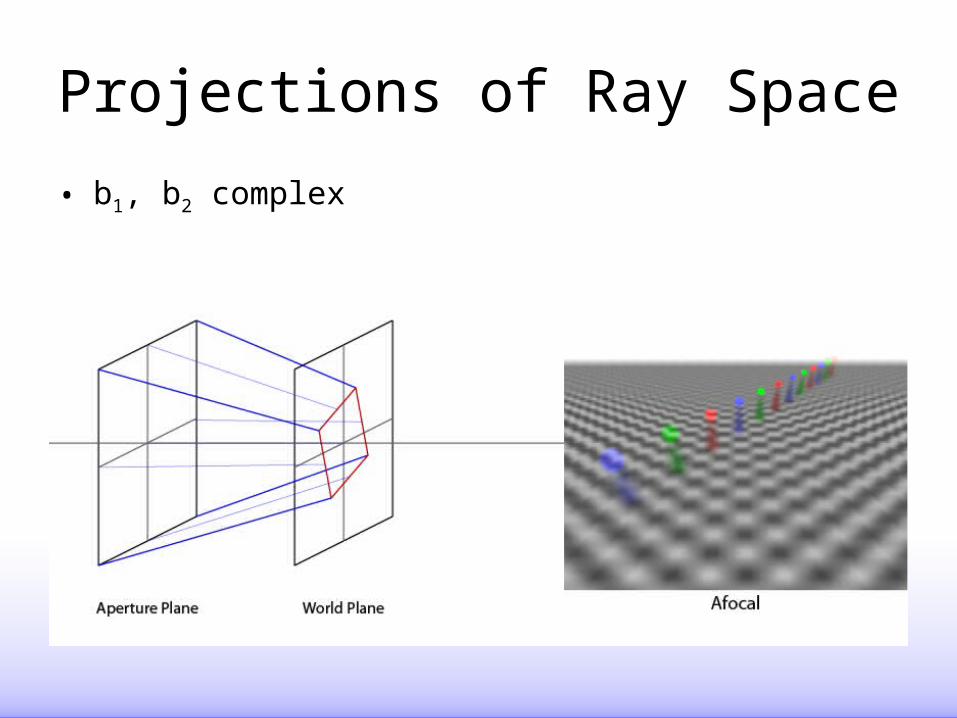
• b1, b2 complex
Slices of Ray Space
Slices of Ray Space
Real Eigenvalues
Complex Conjugate Eigenvalues
Slices of Ray Space
Real Eigenvalues
Complex Conjugate Eigenvalues
Equal Eigenvalues
Slices of Ray Space
Real Eigenvalues
Complex Conjugate Eigenvalues
Equal Eigenvalues
Equal Eigenvalues,
2D Eigenspace
Slices of Ray Space
Real Eigenvalues
Complex Conjugate Eigenvalues
Equal Eigenvalues
One focal slit at infinity
Equal Eigenvalues,
2D Eigenspace
Projections of Ray Space
• Let’s generalize:
Projections of Ray Space
• Let’s generalize:
dudv
v
uP
y
x
v
uF
y
xL
y
x,Image
Projections of Ray Space
• Let’s generalize:
dudv
IP
FIL
y
x
v
u
y
x
Image
Projections of Ray Space
• Let’s generalize:
dudvQL
y
x
v
u
y
x
Image
Projections of Ray Space
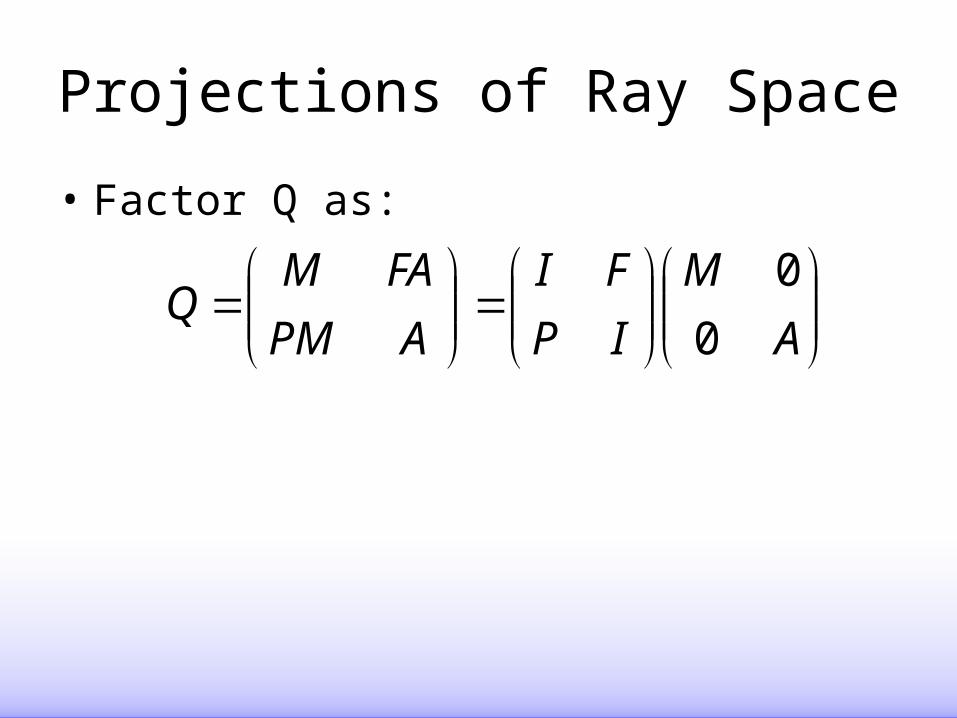
• Factor Q as:
A
M
IP
FI
APM
FAMQ
0
0
Projections of Ray Space
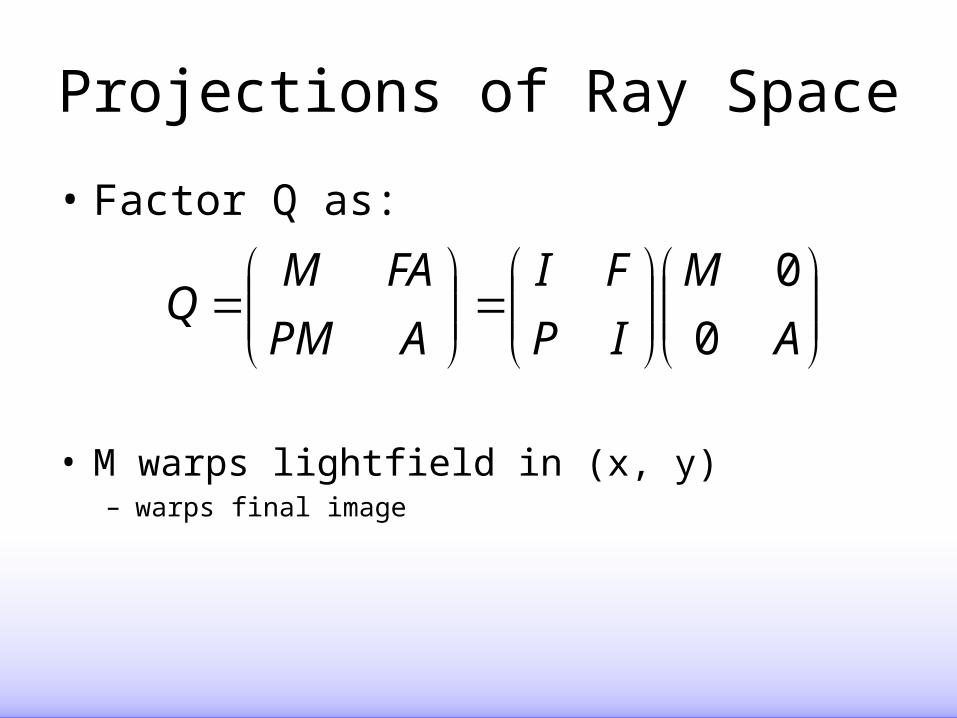
• Factor Q as:
• M warps lightfield in (x, y)– warps final image
A
M
IP
FI
APM
FAMQ
0
0
Projections of Ray Space
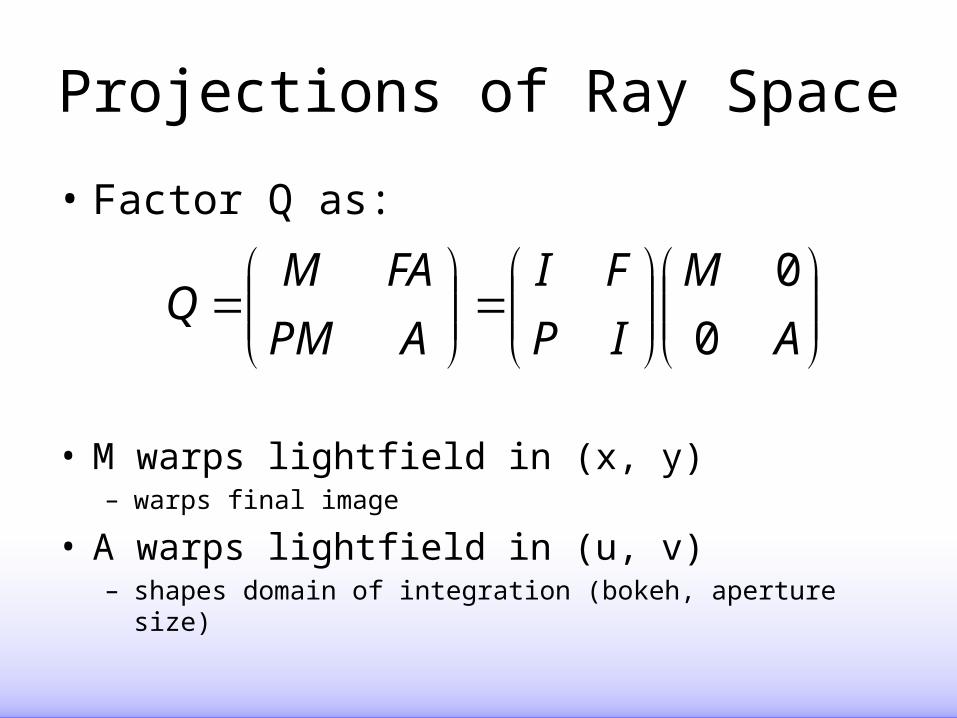
• Factor Q as:
• M warps lightfield in (x, y)– warps final image
• A warps lightfield in (u, v)– shapes domain of integration (bokeh, aperture size)
A
M
IP
FI
APM
FAMQ
0
0
Conclusion
Conclusion
• General Linear Cameras can be characterized by the eigenvalues of a 2x2 matrix.
Conclusion
• General Linear Cameras can be characterized by the eigenvalues of a 2x2 matrix.
• Focus can be described in the same fashion.
Conclusion
• General Linear Cameras can be characterized by the eigenvalues of a 2x2 matrix.
• Focus can be described in the same fashion.
• These matrices are a good way to analyze and specify linear integral projections of ray space.
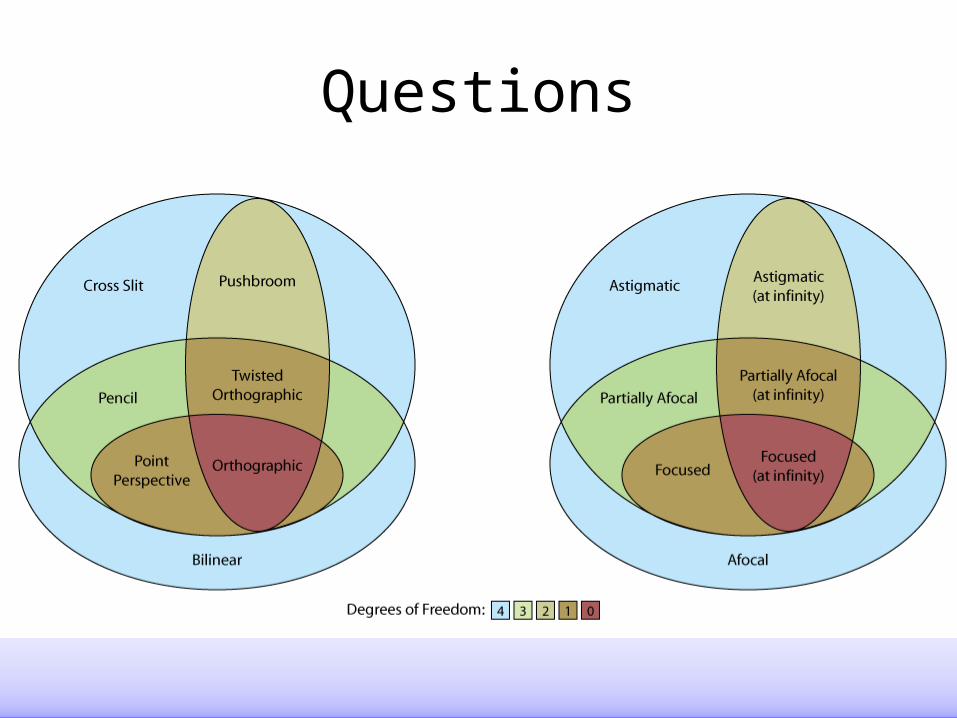
Questions







