
Evaluation and Development of Advanced Cooling Systems
for Microelectronics
TIAGO MANUEL OLIVEIRA HENRIQUES MOITA
Dissertação para obtenção do Grau de Mestre em
ENGENHARIA ELECTROTÉCNICA E DE COMPUTADORES
Júri
Presidente: Professor Doutor José António Beltran Gerald
Orientador: Professor Doutor Marcelino Bicho dos Santos
Co-Orientador: Professor Doutor António Luís Nobre Moreira
Vogal: Professor Doutor José Júlio Alves Paisana
Dezembro de 2008

I
Agradecimentos
Gostaria de começar por agradecer aos meus orientadores, o Professor Marcelino Santos e o
Professor António Moreira, pelo apoio, sugestões, conselhos e incentivo dados ao longo do processo
de elaboração do presente trabalho.
Também gostaria de deixar um agradecimento muito especial aos meus pais que sempre me
incentivaram e acompanharam. Agradeço-lhes pelos seus conselhos e paciência que tiveram ao
longo de todo o meu percurso académico.
Agradeço ainda à Ana, cuja experiência, conselhos e amizade me permitiram alcançar objectivos e
superar desafios, tendo o seu apoio sido fundamental ao longo de todo o meu percurso académico.
Quero deixar um agradecimento à empresa AquaPC (http://www.aquapc.com/) e em particular ao
Engenheiro Rui Laginha por desde logo se ter disponibilizado a ajudar na escolha do sistema de
arrefecimento a água, por ter acompanhado o processo de selecção do equipamento e por ter
oferecido todo o equipamento de Watercooling utilizado na presente tese.
Gostaria também de agradecer ao representante da Candela em Portugal por ter disponibilizado
ao Laboratory of Thermofluids, Combustion and Energy Systems do IN+ a válvula utilizada neste
trabalho.
Gostava ainda de agradecer aos funcionários das oficinas do departamento de engenharia
mecânica pelo apoio prestado durante a execução deste trabalho.
Por fim, gostava de agradecer a todos os meus amigos e em particular aqueles que me
acompanharam ao longo do curso e com quem pude partilhar a minha experiência académica.

II
Resumo
O presente trabalho comporta o desenvolvimento de sistemas avançados de arrefecimento para
processadores de computadores e inclui a construção de um modelo experimental que permite
reproduzir o comportamento dinâmico de um processador real.
O modelo permite a realização de diversos testes, nomeadamente testes com potência constante,
temperatura constante ou variação de potência no tempo para a reprodução de condições reais.
Estudou-se o desempenho térmico de sistemas de arrefecimento de uso corrente com recurso a ar
e água (contacto indirecto), verificando-se que, embora não exista um claro domínio, o sistema
indirecto a água apresenta um melhor desempenho.
Um sistema de arrefecimento por contacto directo foi também aplicado ao modelo experimental.
Este sistema baseia-se na tecnologia de Spray Cooling Intermitente. O trabalho inclui um estudo
aprofundado da influência do sinal (frequência e duty cycle) e pressão de injecção, distância entre
atomizador e superfície do processador, posição do processador (horizontal versus vertical) e
propriedades do líquido de arrefecimento.
Os resultados demonstram que esta tecnologia poderá funcionar como sistema de arrefecimento,
após optimização, demonstrando-se ainda que: i) existe uma distância óptima entre atomizador e
superfície do processador (20 – 30mm) e ii) uma gama óptima para o duty cycle (50%-60%) que
permite uma correcta gestão de líquido; iii) o uso de reduzidos duty cycle e elevadas frequências
deve ser evitado visto não garantir o equilíbrio térmico; iv) o processador deverá funcionar na
horizontal.
O presente trabalho foi aceite para apresentação oral na 22nd European Conference on Liquid
Atomization and Spray Systems (ISBN 978-88-903712-0-2).
Palavras-Chave
Arrefecimento – Inovação – Processador – Modelo Experimental – Spray – Intermitente

III
Abstract
The work reported aims the development of advanced cooling systems for computer processors. It
includes the design and construction of a test bed which reproduces the dynamic behaviour of a real
processor.
The test bed can operate under diverse thermal boundary conditions, namely constant power
dissipation, constant temperature and a time varying heat flux typical of real operating conditions. The
experiments encompass the quantification of the thermal performance of air-cooling and indirect
water-cooling systems currently available in the market. The results show that, although by a small
margin, the water system performs better.
A direct cooling apparatus was then applied to the test bed, which considers a recently technology
of Intermittent Spray Cooling. The work includes a comprehensive study of the influence of the
injection signal (frequency and duty cycle) and pressure, distance from the nozzle to the processor
surface, orientation of the processor (horizontal versus vertical) and thermal properties of the coolant.
The experiments clearly show that the technology has the ability to operate as a cooling system,
given proper optimization, and the results show that: i) there is an optimal distance to place the nozzle
above the processor (20 – 30mm) and ii) an optimal duty cycle range (50%-60%) that allows a correct
fluid management; iii) small duty cycles with high frequencies should be avoided as they cannot
manage accurately the system temperature; iv) processors should work horizontally.
The present work was accepted for oral presentation at the 22nd European Conference on Liquid
Atomization and Spray Systems (ISBN 978-88-903712-0-2).
Keywords
Cooling – Innovation – Processor – Test Bed – Spray – Intermittent

IV
Índice
Agradecimentos.................................................................................................................................. I
Resumo............................................................................................................................................. II
Abstract ............................................................................................................................................ III
Índice................................................................................................................................................ IV
Lista de Tabelas ............................................................................................................................... VI
Lista de Figuras ............................................................................................................................... VII
Nomenclatura ................................................................................................................................... IX
Capítulo 1 - Introdução........................................................................................................................1
1.1. Contexto, motivação e principais conceitos..........................................................................1
1.2. Objectivos............................................................................................................................7
1.3. Organização da tese............................................................................................................7
Capítulo 2 - Tecnologias de arrefecimento de processadores: estado da arte......................................8
Capítulo 3 - Modelo Experimental: Simulação de um Intel® Pentium® 4 no encapsulamento de 423
pinos.................................................................................................................................................18
3.1. Metodologia de análise ......................................................................................................18
3.2. Principais características do sistema a simular...................................................................18
3.3. Construção do modelo experimental: evolução cronológica ...............................................19
3.4. Versão final do Modelo experimental: construção, controlo e teste.....................................24
3.4.1. Controlo: circuitos auxiliares ........................................................................................26
3.4.2. Controlo: programação do microcontrolador ................................................................29
3.4.3. Controlo: programa de interface com o utilizador .........................................................36
3.4.4. Controlo: testes finais ..................................................................................................42
Capítulo 4 - Sistemas de arrefecimento considerados e metodologia experimental ...........................45
4.1. Sistemas de Arrefecimento de uso corrente.......................................................................45
4.1.1. Sistema de convecção forçada a ar (Air-Cooler) ..........................................................45
4.1.2. Sistema de contacto indirecto com líquido (Watercooling)............................................46
4.2. Sistema de arrefecimento de contacto directo: Intermittent Spray Cooling (ISC).................47
4.3. Metodologia Experimental..................................................................................................50
4.3.1. Sistemas de uso corrente ............................................................................................50
4.3.2. Intermittent Spray Cooling (ISC) ..................................................................................51
Capítulo 5 - Resultados experimentais ..............................................................................................54
5.1. Sistemas de arrefecimento de uso corrente .......................................................................54
5.2. Intermittent Spray Cooling (ISC).........................................................................................58
Capítulo 6 - Conclusão e sugestões para trabalho futuro...................................................................81
Referências ......................................................................................................................................85
ANEXO 1 – Conceitos Termodinâmicos, Transferência de Massa e de Calor....................................88
ANEXO 2 – Programação Microcontrolador: Fluxogramas ................................................................95
ANEXO 3 – Programação Interface: Fluxogramas.............................................................................98

V
ANEXO 4 – Artigo para apresentação oral na 22nd European Conference on Liquid Atomization and
Spray Systems................................................................................................................................102

VI
Lista de Tabelas
Tabela 4.1 – Propriedades termo-físicas dos líquidos de arrefecimento utilizados. ............................52

VII
Lista de Figuras
Figura 1.1 – Evolução do Fluxo de Calor Dissipado (W/cm2), [7]. ........................................................1
Figura 1.2 – Evolução da frequência de relógio consoante a tecnologia de fabrico do processador [3].
....................................................................................................................................................2
Figura 1.3 – Exemplo de fluxos máximos de Calor removido (W/cm2) considerando diversas técnicas
de arrefecimento e tendo por base uma temperatura do chip de 85ºC, [7]. ...................................3
Figura 1.4 – Arrefecimento de processadores por contacto: (a) Indirecto; (b) Directo...........................4
Figura 2.1 – Curva de arrefecimento típica [14]. ..................................................................................9
Figura 3.1 – Esquema do Processador P4, [33].................................................................................18
Figura 3.2 – Esquema com as principais dimensões de um P4, [33]..................................................19
Figura 3.3 – Modelo inicial: (a) Colocação das resistências; (b) Disposição dos termopares. .............20
Figura 3.4 – Esquemático de uma montagem de Darlington. .............................................................22
Figura 3.5 – Segundo modelo experimental: (a) Alojamento para transístor; (b) Sistema final............22
Figura 3.6 – Esquema do controlo manual do segundo modelo experimental. ...................................22
Figura 3.7 – Modelo Final: (a) Fotografia do sistema; (b) Esquema ilustrativo....................................24
Figura 3.8 – Testes realizados com uma potência de 60 W e com uso de Cooler. .............................26
Figura 3.9 – Controlo Automático do modelo experimental. ...............................................................27
Figura 3.10 – Dimensionamento do DAC. .........................................................................................28
Figura 3.11 – Circuito amplificador do sinal de termopar....................................................................29
Figura 3.12 – Testes de temperatura constante a 40ºC em relação ao termopar: (a) Fonte de Calor;
(b) Superfície 1; (c) Superfície 2.................................................................................................43
Figura 4.1 – Funcionamento do sistema de convecção forçada a ar. .................................................45
Figura 4.2 - Sistema de Watercooling: (a) Esquema de ligações; (b) Bloco de arrefecimento.............46
Figura 4.3 – Esquema elucidativo do funcionamento da Técnica de Spray Cooling. ..........................47
Figura 4.4 – Circuito de controlo da válvula a utilizar no Spray. .........................................................48
Figura 4.5 – Spray com HFE7100 a 2.2 bar: (a) Atomização Simples; (b) Atomização Secundaria. ...49
Figura 4.6 – Instalação Experimental. ...............................................................................................50
Figura 4.7 – Perfil de Potência testado, [26]. .....................................................................................51
Figura 5.1 – Comparação entre Watercooling e Cooler para: (a) 15W; (b) 30W; (c) 45W; (d) 60W.....55
Figura 5.2 – Comparação de sistemas de arrefecimento após teste com perfil de potência analisando
2 termopares: (a) Fonte de calor; (b) Superfície 1.......................................................................57
Figura 5.3 – Temperatura no termopar da fonte de calor para testes realizados com HFE7100, 3.0
bar, posição horizontal, com sinal de injecção de 0.71Hz e 72.9% duty cycle. ............................59
Figura 5.4 – Espaço livre numa torre de desktop (volume livre ≈ 11 520 cm3)....................................60
Figura 5.5 – Evolução da temperatura no termopar da fonte de calor para testes com HFE7100, dnoz
de 27 mm, 3.0 bar, posição horizontal e diversos sinais de injecção...........................................61
Figura 5.6 – Evolução da temperatura para testes de spray com sinal de injecção de 2.6Hz, 23.6%
duty cycle, 5.0 bar, posição horizontal recorrendo a metanol. .....................................................62

VIII
Figura 5.7 – Evolução da temperatura no termopar da fonte de calor em testes de spray com metanol
(posição horizontal) para: (a) 2.3 bar, 0.8Hz; (b) 2.3 bar, 2.6Hz; (c) 3.3 bar, 0.8Hz; (d) 3.3 bar,
2.6Hz; (e) 5.0 bar, 0.8Hz; (f) 5.0 bar, 2.6Hz. ...............................................................................64
Figura 5.8 – Evolução da temperatura no termopar de Superfície 2 em testes de spray, posição
horizontal recorrendo a metanol para: (a) 2.3 bar, 0.8Hz; (b) 2.3 bar, 2.6Hz; (c) 3.3 bar, 0.8Hz; (d)
3.3 bar, 2.6Hz; (e) 5.0 bar, 0.8Hz; (f) 5.0 bar, 2.6Hz. ..................................................................66
Figura 5.9 – Efeito da frequência do sinal de injecção na temperatura do termopar da fonte de calor,
em testes de spray (posição horizontal) com metanol, 2.3 bar, para diferentes duty cycle: (a)
23.6%; (b) 57.7%; (c) 75.2%. .....................................................................................................67
Figura 5.10 – Comparação do efeito da pressão em testes de spray na posição horizontal, com um
sinal de injecção de 2.6Hz com 23.6% de duty cycle, recorrendo a metanol para 2 dos
termopares do sistema: (a) Fonte de Calor; (b) Superfície 2. ......................................................68
Figura 5.11 – Efeitos do duty cycle na evolução da temperatura do termopar da fonte de calor para
testes com metanol, posição vertical, 2.3 bar e dnoz de 20 mm para um sinal de injecção com: (a)
0.8Hz; (b) 2.6Hz.........................................................................................................................70
Figura 5.12 – Testes de spray para dnoz de 20 mm, com metanol (posição vertical), 2.3 bar e um sinal
de injecção com 75.2% duty cycle e: (a) 0.8Hz; (b) 2.6Hz...........................................................72
Figura 5.13 – Comparação entre testes na posição horizontal e vertical para testes com metanol, 2.3
bar e sinal de injecção de 0.8Hz com 57.7% duty cycle para os termopares: (a) Fonte de calor;
(b) Superfície 2. .........................................................................................................................73
Figura 5.14 – Teste de spray intermitente recorrendo a HFE7100, 2.3 bar, posição horizontal, com dnoz
de 20 mm e um sinal de injecção de 0.8Hz com 75.2% duty cycle..............................................76
Figura 5.15 – Temperatura no termopar da fonte de calor após variação do duty cycle, usando
HFE7100, 2.3 bar, posição horizontal, dnoz de 20 mm para: (a) 0.8Hz; (b) 2.6Hz.........................76
Figura 5.16 – Efeitos das propriedades do líquido de arrefecimento na temperatura do termopar da
fonte de calor, para testes com dnoz de 20 mm, posição horizontal, 2.3 bar e sinais de injecção de
0.8Hz com duty cycle de: (a) 23.6%; (b) 57.7%; (c) 75.2%. ........................................................77
Figura A 1 – Transferência de calor por condução numa parede plana unidimensional com uma
distribuição de temperatura T(x).................................................................................................90
Figura A 2 – Diagrama de fase para um sistema genérico, [15, 45]. ..................................................94

IX
Nomenclatura
.
Q Taxa de transferência de calor
.
q Fluxo de calor W/m2
µ Viscosidade dinâmica kg m-1 s-1
A Área m2
A/D Analog-to-digital converter
AMPOP Amplificador Operacional
Aq Fonte de Calor
ASIC Application-specific integrated circuit
CI Circuito Integrado
CMOS Complementary metal–oxide–semiconductor
CMRR Common-mode rejection ratio dB
cp Calor específico mássico J kg-1 K-1
CPU Central Processing Unit
Ctrans Capacidade de carga do transístor F
DAC Digital-to-analog converter
DC Direct Current
dnoz Distância entre atomizador e superfície aquecida mm
EEPROM Electrically Erasable Programmable Read-Only Memory
ESC Evaporative Spray Cooling
f Frequência Hz
FC-CBGA Flip-chip ceramic ball grid array
hfg Calor latente de vaporização kJ kg-1
i Corrente A
I/O Input/Output
I2C Inter-Integrated Circuit
IHS Integrated Heat Spreader
ISC Intermittent Spray Cooling
ISCS Intermittent Spray Cooling Systems
ITRS International Technology Roadmap for Semiconductors
k Condutividade Térmica W m-1 K-1
ke Condutividade Térmica resultante do movimento de electrões livres
kl Condutividade Térmica resultante das ondas vibracionais da rede
constitutiva do material
l Comprimento m
m Massa kg

X
Máx. Máximo
MCM Multi-Chip Modules
Mín. Mínimo
MOS Metal–Oxide–Semiconductor Field-Effect Transistor
Noz Nozzle – Atomizador
OLGA Organic Land Grid Array
P (maiúscula) Potência W
p (minúscula) Pressão Bar
P4 Intel® Pentium® 4
PCB Printed circuit board
PDA Phase Doppler Anemometry
PGA Pin Grid Array
PLL Phase-locked loop
Q Transferência de Calor
RAM Random Access Memory
RT Resistência Térmica
RTcond. Resistência Térmica de Condução
RTconv. Resistência Térmica de Convecção
SC Spray Cooling
T Temperatura ºC
T∞ Temperatura em infinito ºC
TAmb. Temperatura Ambiente ºC
Teb Temperatura ebulição ºC
Tenc. Temperatura encapsulamento ºC
Típ. Típico
TLíq. Temperatura do Líquido ºC
TProc. Temperatura no Processador ºC
TS Temperatura na Superfície ºC
TTV Thermal test vehicles
tx Instante de Tempo x s
u Velocidade do escoamento m/s
u∞ Velocidade do escoamento em infinito m/s
us Velocidade do escoamento na superfície m/s
Vx Tensão Volts
v (minúscula) Volume específico m3 kg-1
α Difusividade Térmica m2 s-1
β Ganho de corrente
θ Ângulo do spray º
ρ Densidade kg m-3
σ Tensão Superficial N m-1
1
Capítulo 1 - Introdução
1.1. Contexto, motivação e principais conceitos
Desde o aparecimento do transístor (1948 [1]) que os processadores têm sido alvo de constante
evolução e desenvolvimento, seja ao nível da Arquitectura de Computadores ou seja pelo crescente
aumento do número de transístores por Circuito Integrado (CI). Em 1965, o co-fundador da Intel®
Gordon Moore, previu que o número de transístores por chip duplicaria sensivelmente a cada 2 anos
(Lei de Moore) [2]. De facto, a evolução dos processadores da Intel® ao longo dos últimos 40 anos
confirmou a previsão [2]: veja-se por exemplo a evolução do Intel® 4004 introduzido em 1971 com 2
300 transístores, para o Intel® Pentium® 4 (P4) introduzido no ano 2000 já com 42 000 000
transístores [3].
A procura de novas técnicas de fabrico, aliadas ao desenvolvimento da arquitectura [4] permitiu,
que, desde o final da década de 70 do século XX, se tivessem desenvolvido processadores com
melhorias de desempenho da ordem dos 35% ao ano [4], ao mesmo tempo que se assistiu à redução
dos encapsulamentos dos CI [5]. No entanto, o desenvolvimento de processadores mais rápidos em
encapsulamentos mais reduzidos, conduziu a um aumento significativo da potência dissipada e dos
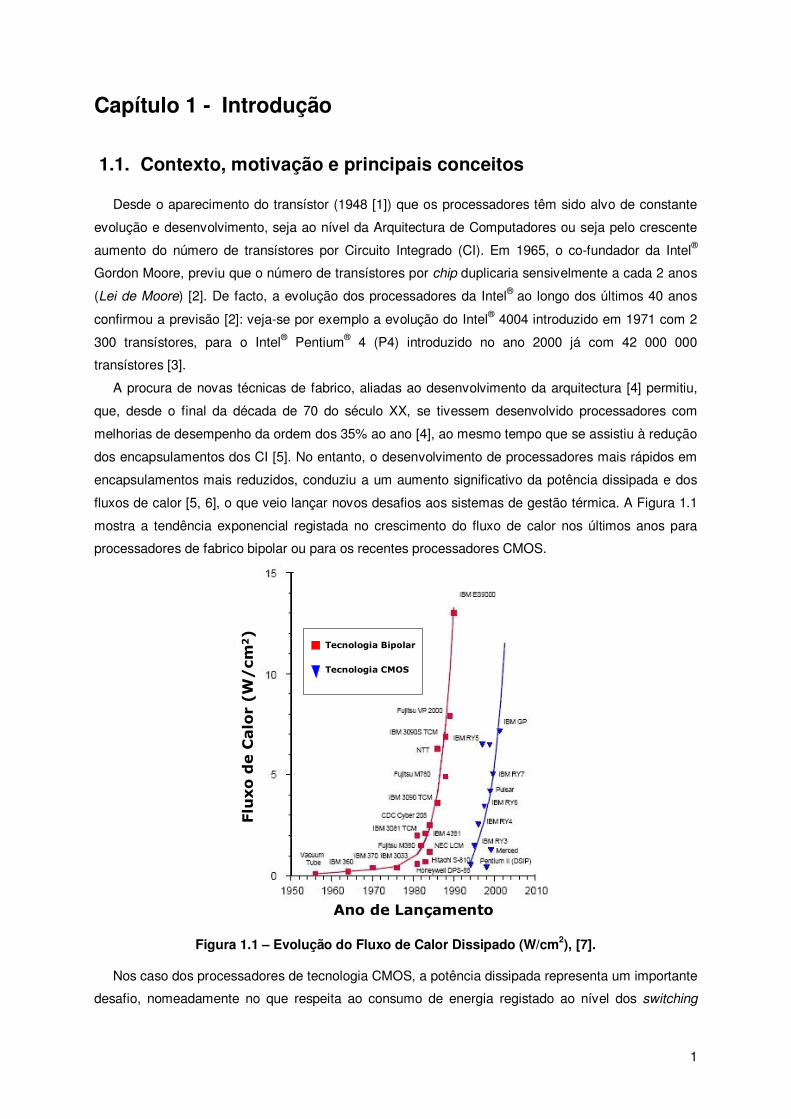
fluxos de calor [5, 6], o que veio lançar novos desafios aos sistemas de gestão térmica. A Figura 1.1
mostra a tendência exponencial registada no crescimento do fluxo de calor nos últimos anos para
processadores de fabrico bipolar ou para os recentes processadores CMOS.
Fluxo de Calor (W/cm2)
Ano de Lançamento
Tecnologia Bipolar
Tecnologia CMOS
Fluxo de Calor (W/cm2)
Ano de Lançamento
Tecnologia Bipolar
Tecnologia CMOS
Figura 1.1 – Evolução do Fluxo de Calor Dissipado (W/cm2), [7].
Nos caso dos processadores de tecnologia CMOS, a potência dissipada representa um importante
desafio, nomeadamente no que respeita ao consumo de energia registado ao nível dos switching

2
transistors [4]. Neste caso, a energia consumida por transístor é proporcional à capacidade de carga
do transístor, frequência de relógio e tensão, f(Ctrans, f, V). No entanto, a capacidade de carga do
transístor e a frequência de relógio tornaram-se parâmetros dominantes devido aos aumentos
registados em número de transístores e nas frequências de relógio utilizadas [4].
A Figura 1.2 apresenta as frequências de relógio de alguns processadores, dispostos por
tecnologia de fabrico, verificando-se uma tendência de diminuição do tamanho mínimo de fabrico e
um aumento da frequência de relógio. De facto, a evolução dos processadores single-core trouxe
aumentos na frequência de relógio da ordem dos 20% ao ano [8] e actualmente existem
processadores com 60 000 000 transístores e frequências de relógio de 2 a 3 GHz [9, 10].
0
50
100
150
200
250
300
350
400
450
500
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5 5.5 6
Tecnologia [µm]
Fre
quência
[M
Hz]
Intel® Pentium® III
500 MHz
0.18 µm
Intel® Pentium® II
300 MHz
0.25 µm
Intel® 486
25 MHz
1 µm
Intel® 8086
5 MHz
3 µm
Intel® 8080
2 MHz
6 µm
Figura 1.2 – Evolução da frequência de relógio consoante a tecnologia de fabrico do
processador [3].
Esta tendência conduziu Hennessy e Patterson [4] a referir que a questão da gestão térmica de
dispositivos microelectronicos seria, a curto prazo, uma das maiores limitações no desenvolvimento
de novos processadores. Tendo em conta as previsões dos actuais roadmap que apontam para
valores médios de fluxos de calor por chip superiores a 150 W/cm2 e hot spots com fluxos de calor
que podem atingir os 1 kW/cm2, Bar-Cohen et al. [6] alertaram para a degradação do desempenho e
fiabilidade dos chips causada pelo aumento da potência térmica dissipada. Aliás, Tonapi et al. [11]
referem que um aumento de apenas 10ºC na temperatura de junção é suficiente para reduzir a
metade o tempo de vida do sistema, enquanto Paik et al. [12] referem que um aumento de 15ºC pode
aumentar os tempos de resposta (interconnect delay) de 10% a 15%.
Considerando que, de acordo com o International Technology Roadmap for Semiconductors
(ITRS) [12], o consumo de potência dos computadores de alto desempenho irá aumentar de 147 W
para 288 W em 2016, o desenvolvimento de novos sistemas de arrefecimento torna-se decisivo.
Cader et al. [13] referem mesmo que os sistemas convencionais de arrefecimento a ar já têm
dificuldade em conseguir acompanhar os aumentos da frequência de relógio e número de transístores
sendo que o ITRS de 2002 [7] indica já um fluxo de calor de aproximadamente 36 W/cm2 para o
Pentium® 4, valor que não está distante do apresentado por Chu [7] como o máximo (50 W/cm2)
removido por sistemas de arrefecimento de convecção forçada a ar (Figura 1.3).

3
Coloca-se então a questão se estes sistemas têm capacidade para responder aos novos desafios.
0
20
40
60
80
100
120
140
Air Cooling Contacto Indirectocom Água ou Cooling
por Imersão
Cooling com recurso a Materiais de Elevada Condução Térmica
Fluxo de Calor no
Chip (W/cm
2)
Intel® Pentium® 4
≈≈≈≈ 36 W/cm2
Valores considerando:
TChip = 85ºC
Tinlet = 25ºC
Figura 1.3 – Exemplo de fluxos máximos de Calor removido (W/cm2) considerando diversas
técnicas de arrefecimento e tendo por base uma temperatura do chip de 85ºC, [7].
Nos processadores actuais, apesar do tipo de encapsulamento utilizado em cada processador
variar consoante o fabricante, é habitual existir um dissipador térmico colocado no topo do
processador que funciona como interface para a remoção de calor do processador. Este dissipador
encontra-se em contacto directo, recorrendo a massas térmicas para melhorar a condução de calor,
com o processador e arrefece-o por condução. Este conceito de calor associado com o processador
refere-se à quantidade de energia transferida, numa interacção de calor, pela fronteira deste com a
sua envolvente, sendo que o valor desta transferência de calor depende do processo em si e não
apenas dos estados finais atingidos. No caso da transferência de calor existem três mecanismos
básicos de transferência: condução, convecção e radiação térmica. O anexo 1 apresenta alguns
conceitos de forma mais completa, embora não exaustiva, para permitir uma melhor compreensão
dos fenómenos físicos relacionados com o presente trabalho.
Desta forma, na maioria dos casos, os sistemas de arrefecimento arrefecem o dissipador do
encapsulamento do processador que por sua vez, por condução, arrefece o processador. No entanto,
o arrefecimento deste dissipador está relacionado com o tipo de sistema de arrefecimento utilizado,
nomeadamente se este é baseado em contacto directo ou indirecto.
Nos sistemas de arrefecimento por contacto indirecto, o arrefecimento é levado a cabo por um
bloco de interface térmica que é arrefecido e visto estar em contacto directo com o dissipador do
processador, o arrefece por condução. No entanto, este bloco também necessita de ser arrefecido,
podendo-se recorrer a sistemas de convecção forçada a ar ou a sistemas que utilizam líquidos. Seja
qual for o método utilizado, está-se perante um novo tipo de transporte de energia, neste caso a
convecção entre o bloco de interface e o fluido utilizado no arrefecimento (ar ou líquido).
Existem ainda os sistemas de arrefecimento por contacto directo que eliminam a necessidade de
utilizar este bloco de interface visto que a técnica de arrefecimento utilizada actua directamente sobre
o dissipador do processador.
No contexto do arrefecimento de processadores é ainda necessário introduzir o conceito de
resistência térmica. A resistência térmica surge da analogia entre a difusão de calor e a condução de

4
corrente eléctrica [14]. Podem então existir resistências térmicas de condução (RTcond.) e convecção
(RTconv.) sendo que se verifica, em geral, nos meios líquidos e gasosos um domínio da convecção
[15]. Existe ainda um terceiro tipo de resistência térmica que pode desempenhar um importante papel
na diminuição de temperatura entre dois materiais [14]. Este terceiro tipo de resistência é denominado
Resistência de Contacto [14] e deve-se principalmente à existência de rugosidades na superfície que
conduzem ao aparecimento de pontos de contacto mas também de vazios que, na maioria dos casos,
estão cheios de ar [14]. Uma solução para diminuir a resistência de contacto consiste em utilizar, nos
pontos de contacto, um fluido com uma condutividade térmica superior à do material utilizado [14].
Uma utilidade importante do conceito de resistência térmica é que permite tratar o problema da
transmissão de calor em analogia com um circuito eléctrico. De facto, as resistências térmicas podem
ser associadas em série ou paralelo. Desta forma, a associação em série de resistências térmicas
equivale à soma do valor das resistências (Eq. 1.1), enquanto a associação em paralelo corresponde
à soma do inverso destas (Eq. 1.2) [15].
21 RRRSérieT += (Eq. 1.1)
21
111
RRRParaleloT
+= (Eq. 1.2)
Desta forma, ao analisar a Figura 1.4 entende-se que o uso de sistemas de arrefecimento indirecto
comporta uma resistência térmica de condução adicional entre o bloco de interface e o dissipador
térmico. Este facto tem particular importância ao analisar a transferência de calor (Eq. 1.3). De facto,
esta depende da diferença entre a temperatura do processador (TProc.) e a temperatura ambiente
(TAmb.) e da resistência térmica global do sistema.
Rcond. 1
Rcond. 2
Rconv.
Dissipador
Bloco de
interface
Processador
Contacto Indirecto
(a)
Rcond. 1
Rconv.
Dissipador
Processador
Contacto Directo
(b)
Figura 1.4 – Arrefecimento de processadores por contacto: (a) Indirecto; (b) Directo.
( )..Pr
. 11Amboc
TT
TTR
TR
QGLOBALGLOBAL
−=∆= (Eq. 1.3)

5
No caso do arrefecimento de processadores, pretende-se baixar a temperatura do processador
pelo que a diminuição da resistência térmica permite actuar neste sentido (Eq. 1.4).
.
.
.Pr AmbToc TRQTGLOBAL
+= (Eq. 1.4)
Desta forma, para o caso dos sistemas de arrefecimento por contacto indirecto, a resistência
térmica do sistema será superior visto corresponder à associação em série de todas as resistências
envolvidas ( ).2.1. convcondcondGLOBAL TTTT RRRR ++= , enquanto nos sistemas de arrefecimento directo, ao
eliminar o bloco de interface, está-se perante uma resistência térmica global menor
( ).1. convcondGLOBAL TTT RRR += , considerando condições equivalentes. Desta forma, os sistemas de
arrefecimento por contacto directo apresentam um maior potencial para diminuir a temperatura do
processador visto permitirem diminuir a resistência térmica do sistema.
Voltando à Figura 1.4 é possível verificar que o transporte de energia por convecção está presente
nos sistemas de contacto directo ou indirecto. A transferência de calor por convecção pode ser
forçada, nos casos em que o escoamento é provocado por meios externos (e.g. arrefecimento
convectivo a ar), ou livre (ou natural) quando o escoamento é provocado pelas forças que se originam
nas diferenças de densidade provocadas pelas variações de temperatura no fluido [14].
Independentemente da natureza do processo de transferência de calor por convecção, é sempre
possível encontrar uma relação entre a diferença de temperaturas da superfície (TS) e do fluido (TLíq.)
(Eq. 1.5) [14]. A esta relação dá-se o nome de fluxo de calor convectivo, também representado por
.
q , sendo expressa em W/m2 [14]. Na Eq. 1.5 a constante de proporcionalidade h representa o
coeficiente de transferência convectiva de calor, sendo expresso por W/[m2.K] [14]. Esta constante
contém todos os parâmetros que influenciam a transferência de calor por convecção [14].
( ).
.
LíqS TThq −= (Eq. 1.5)
De facto, nos sistemas de arrefecimento por contacto indirecto (e.g. Watercooling) a principal
melhoria face aos sistemas convencionais a ar está relacionada com o facto de o h dos sistemas a ar
ser inferior pelas características do ar quando comparadas face às características da água. Como
observável na Figura 1.3, os sistemas de arrefecimento baseados em água por contacto indirecto
podem chegar a remover o dobro do fluxo de calor relativamente aos sistemas convencionais a ar.
Por outro lado, a convecção também ocorre nos sistemas por contacto directo, que têm a
vantagem de eliminarem uma resistência térmica de contacto entre o bloco de interface e o dissipador
do processador. No entanto também nestes sistemas o coeficiente de transferência de calor h
representa um importante papel visto estar dependente do tipo de sistemas utilizados. De facto, o uso
de sprays em lugar de submergir o processador em líquidos que permitam o contacto directo (líquidos
dieléctricos) pode trazer vantagens. No uso de sistemas de contacto directo existem benefícios se o
líquido de arrefecimento vaporizar, e.g. Bar-Cohen et al. [6], já que, para mudar de fase, o líquido
remove da superfície uma quantidade significativa de calor a temperatura constante. De facto, o
coeficiente de transferência de calor, h, é cerca de 5 vezes inferior num sistema de convecção

6
forçada com líquidos (50 – 20000 W/m2.K) relativamente ao que ocorre num sistema com mudança
de fase (2500 – 100000 W/m2.K), e.g. [14]. Neste sentido, é necessário utilizar líquidos com
temperaturas de ebulição inferiores à temperatura a que se pretende arrefecer, [16].
Adicionalmente, a remoção de calor poderá ser mais eficiente recorrendo a sprays. Os sistemas
de Spray Cooling (SC) consistem na pulverização do líquido (divisão do líquido em pequenas gotas)
que são projectadas sobre o sistema a arrefecer [17]. Com o uso de sprays com a correcta taxa de
evaporação, o sistema poderá estar constantemente a funcionar em mudança de fase desde que se
garanta uma correcta quantidade de líquido a contactar com a superfície apenas durante o tempo
necessário para que ocorra a mudança de fase em todo esse líquido. Nos sprays contínuos esta
situação é difícil de alcançar visto que o líquido pulverizado acaba por não mudar de fase durante o
período de contacto, começando-se a assistir ao aparecimento de um filme de líquido sobre a
superfície que altera o processo de remoção de calor, atrasando a mudança de fase. No entanto, o
uso de sprays intermitentes poderá permitir um maior controlo sobre o filme de líquido e mecanismos
de transferência de calor (e. g., Panão e Moreira [18, 19]) na medida em que num spray intermitente
torna-se possível controlar a quantidade de líquido injectada através do controlo de frequência e
duração do pulso do sinal de injecção.
Bar-Cohen et al. [6] referem que a transferência de calor por SC com uso de dieléctricos aparenta
ser muito mais efectiva do que a técnica de Pool Boiling, garantindo uma temperatura uniforme na
superfície a arrefecer e que apesar do SC e Jet Impingement apresentarem coeficientes de
transferência de calor semelhantes, as técnicas de SC apresentam temperaturas mais uniformes na
superfície quente, bem como evitam o dryout prematuro (situação em que todo o líquido vaporiza da
placa podendo conduzir a danos). Também Shedd [20] refere que as técnicas de SC permitem
alcançar coeficientes de transferência de calor de aproximadamente 10000 W/m2.K, recorrendo a
líquidos refrigerantes.
Relativamente à técnica de Evaporative Spray Cooling (ESC), Bash et al. [21] referem que a
aplicação desta tecnologia em sistemas com fontes de calor uniforme permite remover até 1300
W/cm2 usando água e 300 W/cm2 com líquidos dieléctricos.
Apesar de já haver alguns sistemas deste tipo em comercialização, esta ainda é uma tecnologia
em desenvolvimento pelo que se torna necessário estudar os parâmetros fundamentais a utilizar na
construção de um sistema prático. No caso particular dos sistemas de spray intermitente é ainda
necessário verificar quais as condições mais vantajosas para o uso em casos reais. Adicionalmente,
a maioria dos estudos já apresentados são fundamentais e baseados em montagens experimentais
com fluxos de potência constante (e.g. Panão e Moreira [18, 19] ou Mudawar e Estes [22]). Em
muitos casos, como Moita e Moreira [23, 24, 25], considera-se uma condição de fronteira térmica
correspondente a temperatura constante em vez de fluxo térmico imposto.
Neste contexto, o presente trabalho considera o projecto e construção de um sistema experimental
capaz de reproduzir o comportamento térmico de um processador real de forma a analisar o
desempenho de sistemas de arrefecimento convencionais, bem como o estudo e desenvolvimento de
novos sistemas de arrefecimento baseados em SC. O sistema construído permite a realização de
testes com condições de fronteira que simulam condições reais de funcionamento.

7
1.2. Objectivos
O presente trabalho descreve o desenvolvimento de um sistema experimental construído para
avaliar o desempenho de tecnologias de arrefecimento de processadores em condições reais de
funcionamento. Para cumprir este objectivo foi desenhado e construído um sistema para controlar a
potência dissipada de forma a se obterem condições de fronteira que reproduzem o comportamento
de um processador comercial (Intel® Pentium® 4). O sistema permite ainda ensaios com temperatura
constante imposta num dos sensores de temperatura incorporados.
O principal objectivo do trabalho consiste na avaliação de uma nova tecnologia de arrefecimento,
nomeadamente de contacto directo com um spray intermitente (Intermittent Spray Cooling System –
ISCS). Neste sentido, foi também desenvolvido um sistema de ISCS que permitisse estudar a
influência dos principais parâmetros de funcionamento e que devem ser tidos em conta no projecto
(distância do injector de líquido ao processador; pressão, frequência e duração da injecção de líquido;
orientação do processador relativamente ao spray e propriedades do líquido pulverizado). Pretende-
se analisar os parâmetros em situações exigentes e dinâmicas, equivalentes às que ocorrem em
processadores reais. Para isso foram reproduzidos perfis de potência baseados no estudo de Isci e
Martonosi [26].
Neste trabalho é ainda comparado o desempenho de tecnologias convencionais de contacto
indirecto, nomeadamente um sistema a ar e outro sistema de arrefecimento a água.
1.3. Organização da tese
A presente tese encontra-se dividida em 6 capítulos. O capítulo 1 visa enquadrar o trabalho,
apresenta a motivação e os objectivos; o capítulo 2 apresenta uma breve revisão do estado da arte
na área do arrefecimento de sistemas electrónicos, em particular sistemas de contacto directo; o
capítulo 3 descreve as etapas mais relevantes no desenvolvimento deste sistema. O capítulo 4
apresenta a metodologia experimental utilizada, sendo feita uma introdução aos diversos sistemas de
arrefecimento testados, incluindo o sistema de ISCS. O capítulo descreve de forma separada os
testes realizados com os sistemas de arrefecimento comuns e com o novo sistema desenvolvido visto
que na apresentação de resultados, no capítulo 5, também é feita a divisão entre resultados dos
sistemas de arrefecimento comuns e o sistema de ISCS desenvolvido.
Por fim, o capítulo 6 apresenta as principais conclusões do documento, bem como sugestões de
trabalho futuro.
São ainda apresentados anexos com informação variada, em particular um anexo com uma cópia
do artigo aceite para apresentação oral na 22nd European Conference on Liquid Atomization and
Spray Systems (http://www.ilasseurope2008.org/), tendo sido publicado nos Proceedings (ISBN 978-
88-903712-0-2) da mesma conferência.
Todos os anexos são referenciados ao longo da tese afim de indicar o seu conteúdo.

8
Capítulo 2 - Tecnologias de arrefecimento de
processadores: estado da arte
Embora o estudo das técnicas e sistemas de arrefecimento não seja recente, tem-se intensificado
nos últimos anos devido aos crescentes desafios tecnológicos que se têm apresentado. Em 2003
Tonapi et al. [11] apresentaram um trabalho focado na questão da gestão térmica de dispositivos
microelectronicos, tendo referido a considerável variedade de estratégias existentes e o facto de cada
uma destas apresentar vantagens e desvantagens, sendo que a melhor solução poderá variar de
sistema para sistema. Para a electrónica de consumo, onde se situam os processadores de
computadores, os autores referem o uso de sistemas de arrefecimento por convecção forçada a ar.
Nestes sistemas, o principal problema é o da resistência térmica entre o processador e o dissipador,
sendo que a massa de interface térmica é a principal causa do aumento da temperatura da junção
dos circuitos. De facto, não só esta massa representa, no caso de sistemas complex high-end, até
60% da resistência térmica, como existem dificuldades no desenvolvimento deste tipo de material
devido ao elevado número de propriedades térmicas e mecânicas que este tem de apresentar para
cumprir a sua função de uma forma eficaz [11].
No que respeita a sistemas de arrefecimento com contacto directo, Bar-Cohen et al. [6] referem a
aplicação de líquido, já nos anos 60, para o arrefecimento de sistemas de macro electrónica (e.g.
transístores de potência). Contudo, a técnica só veio a ganhar importância nos anos 80, após ter sido
utilizada por marcas de renome, tais como a IBM. Mas, neste tipo de sistemas de arrefecimento, é
necessário que as propriedades químicas, eléctricas e térmicas dos líquidos respeitem determinadas
restrições. Neste contexto, os autores referem que a constante dieléctrica do líquido de arrefecimento
deve ser próxima da unidade de forma a evitar atrasos de propagação nos circuitos.
Os autores simularam o arrefecimento de um chip com diversas técnicas. O chip simulado era de
silício com dimensões 10 x 10 mm2 e 0.5 mm de espessura, dissipando um fluxo de calor uniforme de
100 W/cm2 pela área activa. Foi ainda simulada a existência de hot spots com diâmetros de 0.1 a 0.4
mm e que dissipavam de 1 a 2 kW/cm2. As medidas de temperatura ao longo de uma diagonal sobre
a face activa do chip (contrária à do arrefecimento), considerando um hot spot de 0.4 mm e com um
fluxo de calor de 2 kW/cm2 com o chip a ser arrefecido com diversos coeficientes de transferência de
calor levaram os autores a concluir que existe uma diminuição considerável de temperatura (≈ 50%)
ao aumentar o coeficiente de transmissão de calor de 5 para 10 kW/m2K, enquanto que aumentos
posteriores até 20 kW/m2K apenas apresentam diminuições de temperatura de 30%, devendo-se este
facto à sobreposição dos efeitos de condução e convecção durante o processo de arrefecimento.
Desta forma, Bar-Cohen et al. [6] concluem que o arrefecimento por contacto directo com recurso a
líquidos tem potencial para limitar a temperatura máxima atingida por chips e hot spots,
apresentando-se como uma solução para o arrefecimento das próximas gerações de
microprocessadores.
O impacto de uma polidispersão líquida (spray) na superfície a arrefecer é hoje considerado por
muitos investigadores no desenvolvimento de sistemas de arrefecimento eficientes (Spray Cooling).

9
Estes sistemas são particularmente relevantes na actual arquitectura dos microprocessadores a qual,
dirigindo-se para dissipações de potência não uniformes, facilita a formação de filme de líquido nos
locais de menor dissipação de potência. De facto, para um processador com 160 mm2 com um CPU
(25% da área) e uma cache (75% da área), ao considerar uma dissipação de 50 W em ambos os
elementos, a densidade de potência do CPU será 3 vezes superior à da cache (124 W/cm2 versus 41
W/cm2) [21]. Neste contexto, Bash et al. [21] apresentam a tecnologia inkjet (utilizada em impressoras
de jacto de tinta) como uma possível solução do problema visto permitir a variação do fluxo de líquido
em cada atomizador, compensando assim a heterogeneidade da potência dissipada. Os autores
construíram uma instalação experimental com um cartucho de inkjet (cartucho de 2 linhas com 256
atomizadores cada) onde era possível variar a frequência de injecção, duração do pulso da fonte de
calor do cartucho, tensão de alimentação e o padrão do spray. O líquido era pulverizado sobre uma
superfície de cobre com 22.5 x 12.5 mm2 aquecida com uma fonte de calor semelhante à utilizada
nos cartuchos, sendo a temperatura monitorizada por 2 termopares do tipo K1 embebidos na placa de
cobre a 2 mm da superfície.
Nesta altura é importante definir o conceito de fluxo crítico. O significado físico do fluxo crítico é
normalmente explicado com recurso a curvas de ebulição que representam a variação do fluxo de
calor removido por um líquido em contacto com uma superfície aquecida. Muito embora a curva
dependa, qualitativamente, das propriedades do líquido e da forma como o líquido contacta com a
superfície (gotas dispersas incidentes ou depositadas, spray incidente ou imersão) a sua forma é
universal e corresponde à representada na Figura 2.1, e. g., [14]: para baixas temperaturas da
superfície, o líquido remove calor sem mudança de fase (calor sensível); à medida que a temperatura
sobe, a evaporação ocorre a taxas sucessivamente crescentes e o calor latente de vaporização
passa a ser o principal mecanismo de remoção de calor; até que a taxa de vaporização se torna
demasiado elevada e o vapor que se forma na interface líquido-sólido não consegue ser eficazmente
removido, actuando como isolamento térmico. A partir desta temperatura, o fluxo de calor removido
pelo líquido diminui até um mínimo à temperatura de Leidenfrost e o sistema entra em colapso
térmico.
Fluxo de calor
∆T = TSuperfície – TSaturação
Fluxo de calor crítico (CHF)
Ponto de Leidenfrost
Figura 2.1 – Curva de arrefecimento típica [14].
1 Termopar de uso genérico que cobre uma gama de temperaturas entre os -184 e os 1260 °C. Utiliza uma junção Cromel (90% Níquel e 10% Crómio) – Alumel (94% Níquel, 3% Magnésio, 2% Alumínio e 1% Silício) [27].

10
O máximo da curva é, por isso, um parâmetro importante a ter em conta no desenho de sistemas
de arrefecimento. É designado por fluxo crítico e a temperatura a que ocorre é a temperatura de
Nukyiama [14].
O seu valor depende das propriedades termo-físicas do líquido de arrefecimento (e.g., calor
latente de vaporização, densidade, tensão superficial) e de parâmetros característicos da forma como
o líquido contacta com a superfície. Quando são utilizados sprays incidentes, esses parâmetros são
as condições de injecção [28].
Bash et al. [21] determinaram o fluxo de calor crítico do sistema de inkjet a partir da variação do
fluxo de calor para diversos fluxos volumétricos de líquido. Verificaram que o fluxo de calor crítico
diminuía linearmente com o aumento da distância vertical a que era colocado o cartucho e atribuíram
a variação à diminuição do momento das gotas do spray. Os autores afirmam ainda que o fluxo de
calor crítico é uma função da configuração do spray e do fluxo de líquido (estando limitado por este)
pelo que, aumentando o fluxo de líquido é possível obter fluxos de calor crítico mais elevados. Este
resultado é concordante com os da presente tese. De facto, também no presente trabalho foram
estudados os efeitos da variação da distância entre o atomizador e a superfície aquecida e a variação
da quantidade de líquido visto ter-se utilizado um spray intermitente com controlo da frequência e
duração de impulso do sinal de injecção. Relativamente ao posicionamento do atomizador sobre a
superfície aquecida, os resultados da presente tese demonstram que este é um parâmetro importante
e os valores obtidos encontram-se de acordo com os verificados por Mudawar e Estes [22]. Estes
autores estudaram a influência da distância do spray a uma superfície aquecida com 12.7 x 12.7 mm2
na optimização do fluxo de calor crítico. Mudawar e Estes [22] referem que, ao contrário do que
acontece num sistema de arrefecimento com jactos, ao se utilizarem sprays a área abrangida é maior
e a distribuição espacial do calor na superfície é mais uniforme.
A quantidade de líquido injectado que atinge a superfície depende do ângulo de spray θ, da
distância entre o atomizador e a superfície (dnoz) e do comprimento da fonte de calor (Laq). Um spray
uniforme, ao embater numa superfície plana que está colocada a uma distância dnoz, ao longo de uma
superfície esférica de raio dnoz produz um fluxo de volume na superfície que decai radialmente a partir
do centro da superfície de impacto. Desta forma, os autores concluíram que a fracção de fluxo de
líquido recebido num alvo (de raio Ralvo) pode ser determinada apenas por relações geométricas e
que esta fracção será igual à unidade quando se verificar a Eq. 2.1.
( )
2tan θ
alvonoz
Rd ≤ (Eq. 2.1)
Esta conclusão é fundamental para a optimização da transferência de calor uma vez que permite
maximizar a utilização do fluxo do spray.
Em [22] realizaram-se testes para optimizar a distância entre o spray e a superfície aquecida e
determinar a correlação deste parâmetro com o fluxo de calor crítico. Os autores concluem que
quando a área de impacto do spray é pequena (spray muito próximo da superfície) apenas uma
pequena fracção da superfície é atingida pelo spray, conduzindo a baixos valores de fluxo crítico de
calor. No extremo oposto, quando a distância entre o spray e a superfície é elevada, o fluxo crítico de

11
calor também diminui uma vez que parte do fluxo de líquido do spray é desperdiçado. Desta forma,
para uma superfície quadrada, o ponto óptimo está situado quando a área de spray é tal que apenas
circunscreve a superfície, sendo de máxima importância a determinação da distância entre o spray e
a superfície aquecida. Os autores referem que para o caso estudado é possível determinar a
distância óptima entre o spray e a superfície sabendo apenas a área da superfície aquecida e o
ângulo do spray.
Relativamente ao uso da técnica de Spray Cooling, Shedd [20] defende que esta pode apresentar
coeficientes de transferência de calor de 10000 Wm-2K-1 recorrendo a refrigerantes e 100000 Wm-2K-1
com o uso de água, deixando no entanto uma nota sobre a falta de conhecimento dos mecanismos
de transporte de energia do SC. Relativamente à quantidade de líquido utilizada, o autor refere que
um spray com uma taxa de evaporação tal que permita a cada gota do spray evaporar totalmente
antes da próxima gota atingir a superfície no mesmo ponto é um sistema extremamente eficiente do
ponto de vista do uso do líquido mas que se torna difícil de controlar. Neste caso, se houver um
intervalo muito grande entre gotas, podem existir aumentos de temperatura levando as gotas do
spray a incidir na superfície já em regime de ebulição pelicular (i.e., acima da temperatura de
Leidenfrost) o que reduz significativamente a remoção de calor, levando a temperatura a aumentar
ainda mais. Por outro lado, se os intervalos forem muito curtos, forma-se um filme de líquido na
superfície, acabando por funcionar como resistência à remoção de calor, diminuindo o desempenho
do sistema de arrefecimento [20]. É ainda referida a falta de conhecimento acerca do papel da
evaporação na remoção de calor, identificando-se uma forte dependência destes sistemas face à
gestão de líquido (que depende do nível de evaporação existente). O autor indica que para sistemas
com pouca evaporação uma correcta gestão do líquido é necessária, apresentando como possível
solução a inversão do sistema (i.e., colocando o sistema a arrefecer voltado para baixo com o spray a
ir de baixo para cima, utilizando a gravidade para remover o filme de líquido). Adicionalmente, Shedd
[20] afirma que nos sistemas com pouca evaporação pode existir acumulação de filme de líquido que
pode bloquear o espaço entre o spray e a superfície. É neste contexto que os sistemas de spray
intermitente podem apresentar vantagens visto permitirem o controlo da quantidade de líquido
injectada e deste modo permitir alcançar a melhor relação entre a quantidade de líquido entregue e o
tempo entre injecções.
Shedd [20] refere ainda o problema do volume total do sistema de arrefecimento e baseado nas
conclusões de Mudawar e Estes [22] afirma que a separação entre o spray e a superfície a arrefecer
pode ser considerável, levando assim ao aumento do volume do sistema de arrefecimento. O autor
determina um conjunto de características que limitam o desempenho dos sistemas de full cone spray,
sendo o principal factor a interacção entre diversos sprays sobre a superfície. Deste modo, é
apresentado um conjunto de características a ser implementadas no desenvolvimento de novos
sistemas: aumento do desempenho térmico, aplicação em escalas maiores sem sacrificar o
desempenho, correcta gestão de líquido e volume final reduzido. Baseado nestas directivas é
apresentado como solução ideal um vector de sprays direccionados para a superfície aquecida a um
ângulo de aproximadamente 45º, devendo o sistema garantir a total cobertura da superfície aquecida,
evitando interacções entre os diversos sprays. No entanto, Shedd [20] refere que este sistema não

12
existe comercialmente e apenas iria permitir uma faixa estreita de gotas a poucos milímetros da saída
do spray, sugerindo antes uma implementação de diversos sprays (aproximadamente 150 µm cada)
furados directamente num microbore tubing (tubos de utilizados por exemplo em testes clínicos [29]),
estando a cerca de 5 mm da superfície aquecida. Testes realizados em [20] indicam que estes sprays
produzem gotas a pressões mais baixas do que é habitual mas que o spray obtido não é tão
uniforme, sendo apresentados coeficientes de transferência de calor de 1.6 a 2.4 W/cm2K com fluxos
de aproximadamente 0.017 a 0.033 l/s utilizando FC-72 sobre uma superfície de 2.54 x 2.54 cm2,
referindo-se que o sistema permite remover em segurança fluxos de 140 W/cm2 (em estacionário) e
picos acima de 150 W/cm2.
A maioria dos trabalhos publicados utiliza instalações experimentais com fluxo de potência
imposto constante, comportamento que não reproduz inteiramente o caso real. No entanto, existem
trabalhos que aplicam sistemas de arrefecimento a casos reais, sendo o caso de Cader et al. [13] um
exemplo. Neste trabalho pretendia-se quantificar a capacidade do SC para funcionar com dissipações
de potência em transitório ao mesmo tempo que se analisavam os efeitos do SC na fiabilidade dos
sistemas electrónicos. Para tal, os autores conduziram estudos com um dummy chip para testar os
efeitos transitórios e com uma placa dual Opteron CompactPCI (microprocessadores AMD Opteron
246) para estudar a fiabilidade do sistema. Foram realizadas comparações com a placa dual Opteron
CompactPCI para sistemas de arrefecimento a ar e SC de forma a comparar ambas as soluções.
No estudo transitório o líquido foi pulverizado de baixo para cima, estando o chip por cima do
spray, com recurso a 5 atomizadores com uma distância entre atomizadores e chip inferior a 20 mm.
Os atomizadores foram dispostos num padrão quadrado com um atomizador no centro, tendo cada
atomizador um spray com 40º de ângulo.
Nos testes de fiabilidade, o líquido foi pulverizado numa posição vertical utilizando 12
atomizadores num padrão de 3 x 4, sendo o ângulo de spray de cada um de 40º. Novamente a
distância dos atomizadores à placa foi inferior a 20 mm.
Os autores referem que o desempenho do sistema foi verificado utilizando thermal test vehicles
(TTV) sendo a temperatura monitorizada em tempo real. Os TTV são protótipos que permitem testes
de fluxo de potência constante, sendo normalmente de silício e com dimensões semelhantes a
processadores reais, contando com elementos resistivos [30].
Nos testes de [13], após estabilização, a potência do sistemas foi variada de forma cíclica, ligando
e desligando a alimentação de forma a provocar uma variação de 94 W com uma temperatura de
junção de aproximadamente 80ºC e, tendo o chip 1.18 cm2, um fluxo de calor de 80 W/cm2. Verificou-
se que o uso do SC permite uma redução de 80ºC (alimentação do sistema ligada) para 34ºC
(alimentação do sistema desligada) em apenas 2 segundos. Relativamente ao uso dos TTV verifica-
se um decaimento exponencial da temperatura.
No estudo de fiabilidade, os autores usaram a placa CompactPCI juntamente com benchmarks
para a mesma frequência de relógio, testando as diferenças entre SC e sistemas de convecção a ar.
Os autores criaram uma rotina em Linux que obriga a um uso contínuo de 100% do processador.
Para os processadores utilizados existe uma temperatura máxima de encapsulamento de 70ºC
para uma potência dissipada de 89 W. Os autores pretendiam quantificar o fluxo de ar necessário

13
para respeitar estas especificações tendo concluído que era necessário um fluxo de ar de 98.7 l/s.
Verificaram ainda que para um fluxo de ar de 58.75 l/s, o processador mais quente dissipava 88.8 W
com uma temperatura de 81.2ºC e que para fluxos mais elevados, de 112.8 l/s, o processador mais
quente apresentava 62ºC com uma redução de potência para os 71.4 W.
Utilizando SC o processador mais quente apresenta para as mesmas características um valor de
47.9ºC e uma queda de potência dissipada para os 58.2 W. Os autores compararam o SC com o
valor de 58.75 l/s a ar, registando no processador mais quente um valor 33.3ºC mais baixo do que
com ar, dissipando 34.5% menos potência.
A influência que o líquido, a temperatura de ebulição e fluxo deste poderiam ter na temperatura do
sistema a arrefecer foi também testada tendo sido utilizados dois líquidos diferentes (PF5060 e
PF5070 ambos da 3M) com pontos de ebulição (a 1 atm) de aproximadamente 56ºC e 80ºC,
respectivamente. Os fluxos de líquido variaram entre 0.0021 l/s e 0.0028 l/s. Os resultados
demonstraram uma redução modesta de temperatura com o uso de PF5060 (menor ponto de
ebulição) sendo considerado normal não existirem alterações significativas visto as propriedades de
ambos os líquidos serem semelhantes. Em [13] refere-se também que a temperatura do sistema a
arrefecer pode ser diminuída com uso de subcooling, i.e., caso se reduza a temperatura do líquido
relativamente à temperatura do seu ponto de ebulição.
Desta forma, Cader et al. [13] afirmam ter provado a possibilidade de utilização de SC como
sistema de arrefecimento, permitindo lidar com potências de 200 W, ao mesmo tempo que permite
aumentar a fiabilidade de circuitos. Os autores registaram coeficientes de transferência de calor na
gama de 3 W/cm2ºC até 4 W/cm2ºC para o SC o que, de acordo com [13], corresponde a um factor de
300 a 400 vezes melhor que os sistemas de ar. Aliás, neste trabalho é indicado que a taxa de falha
de um sistema arrefecido com ar pode ser 30 vezes superior quando comparada com um sistema
arrefecido a SC. Os autores verificaram ainda uma redução de potência dissipada com a redução de
temperatura, apesar de não se alterarem os parâmetros directamente ligados com a variação de
potência. A explicação dada é que apesar da dissipação de circuitos CMOS não estar aparentemente
dependente da temperatura, quando se analisa com atenção os modelos de dissipação verifica-se
que o caso ideal de potência dinâmica dissipada tem em conta a capacidade média que consiste
predominantemente na capacidade de interligações e na capacidade de fanout das portas lógicas
ligadas a um dado nó de saída. Desta forma, nos circuitos actuais de canais pequenos, a dissipação
de potência, sendo provocada por correntes de fuga nos transitórios entre VDD e a massa (aquando
da mudança de valor lógico), acaba por ser dependente da temperatura.
Apesar de o trabalho de Cader et al. [13] usar sistemas reais, continua-se a ter uma análise em
modo transitório da utilização de SC que não representa um comportamento real de um processador.
Adicionalmente, os testes de fiabilidade foram executados com processadores reais mas a funcionar
a 100% da sua capacidade. É neste sentido que a presente tese pretende adicionar conhecimento
visto o sistema construído pretender simular o comportamento dinâmico de um processador
permitindo a variação de potência.
Bonner III et al. [30] apresentaram resultados referentes ao estudo de fluxos de calor na área de
impacto de sistemas de SC. Os autores referem que a maioria dos estudos nesta área recorreram a

14
sistemas experimentais com superfícies aquecidas uniformemente, pelo que foi usado um TTV
(fornecido pela Intel®) com 4 resistências incorporadas e sensores de temperatura e que tem 0.25 mm
de espessura e 7 cm2, permitindo um fluxo de calor constante de 70 W/cm2 e picos superiores a 1000
W/cm2 em pequenos hot spots (menores de 0.25 mm2). Os testes foram conduzidos com água,
metanol e HFE7000 sendo os sprays colocados com um ângulo de 20º relativamente ao TTV e uma
sobreposição na zona de impacto de 50% para garantir cobertura total. O principal objectivo de [30]
era a medição e análise de temperaturas em sistemas com dimensões reais e fluxos de calor
constantes para o uso de sistemas de spray inclinados.
A água foi pulverizada com um fluxo de aproximadamente 0.017 l/s a uma temperatura de 26.7ºC
para um fluxo de calor no chip de 42 W/cm2. O metanol teve um fluxo de aproximadamente 0.021 l/s,
estando o líquido a -31.6ºC. Por fim, o HFE7000 foi utilizado com um fluxo de 0.022 l/s a uma
temperatura de -29.7ºC. Para o metanol e o HFE7000 o chip foi configurado para dissipar 14 W/cm2
de forma uniforme. O coeficiente de transferência de calor é medido na área de impacto, sendo que
este acaba por diminuir à medida que o líquido se afasta da área de impacto.
Os resultados demonstraram um coeficiente de calor para a água na zona de impacto de 7
W/cm2ºC, diminuindo para 1 W/cm2ºC na extremidade do chip, para o metanol de 3.6 W/cm2ºC na
zona de impacto, sendo o valor mínimo de coeficiente de calor de 0.5 W/cm2ºC e para o HFE7000
registou-se 2.5 W/cm2ºC na área de impacto e 0.45 W/cm2ºC na extremidade do chip. Verifica-se que
a água obtém os melhores resultados, seguindo-se o metanol, apesar de haver uma apenas uma
pequena diferença entre este e o HFE7000.
Até este momento os trabalhos apresentados referem-se sempre a sprays contínuos. Tal como
referido na introdução da presente tese, o uso de sprays intermitentes poderá permitir um maior
controlo sobre o filme de líquido e mecanismos de transferência de calor. Neste sentido, o sistema de
SC estudado na presente tese baseia-se na aplicação de um spray intermitente no arrefecimento de
componentes electrónicos. Neste contexto, embora recorrendo a instalações experimentais com
fluxos impostos constantes e não variáveis no tempo, Panão et al. [31] e Panão e Moreira [18, 19]
apresentaram algumas conclusões sobre o uso de sistemas de spray intermitente.
Em [31] é introduzida uma metodologia para análise de efeitos das condições de funcionamento
de um spray intermitente semelhante aos dos sistemas de injecção automóvel (permitindo no entanto
introduzir o estudo do spray intermitente). Os autores combinaram a medição do comportamento
térmico de uma superfície com o uso de um sistema de duas componentes de anemometria laser
(Phase Doppler Anemometry – PDA) permitindo a aquisição em simultâneo da temperatura da
superfície e das características do spray. Desta forma, os autores analisam fluxos críticos de calor e o
fenómeno de Leidenfrost relativamente aos parâmetros de um sistema de injecção intermitente (e.g.
frequência, duração de pulso ou pressão de injecção). Foi criada uma instalação experimental onde
se pulveriza perpendicularmente gasolina comercial num corpo de alumínio que se encontra a 55 mm
do spray, sendo este aquecido por uma resistência eléctrica. De acordo com [31] é possível adquirir
dados sobre o tempo de chegada de cada gota ao corpo aquecido (tempo cíclico e tempo transitório),
velocidades axial e radial das gotas, tamanho destas, temperatura no centro do corpo e na posição
lateral e o fluxo de calor removido pelo uso do spray. Os autores referem que, para além da

15
temperatura de superfície, existem outros parâmetros a considerar, nomeadamente a relação
existente entre interferências de múltiplas injecções.
Os resultados de [31] foram obtidos com durações de pulso de 5 e 10 ms e pressões de 3.0 e 4.5
bar, tendo-se demonstrado que o calor transferido no impacto do spray na superfície depende das
propriedades do líquido, bem como da temperatura da superfície e do tamanho, velocidade e fluxo de
massa de cada gota. Os autores observaram que o fluxo de calor removido da superfície está
relacionado com as características do spray (aquando do impacto) apenas se toda a superfície se
encontrar em regime de ebulição. Isto deve-se ao facto de o fluxo de calor, neste regime, depender
da magnitude de diversas forças que actuam individualmente sobre cada gota na altura de impacto,
determinando o tempo de contacto disponível para a interacção térmica. Os autores concluíram
ainda, utilizando frequências entre 10 e 30 Hz, um pulso de 5 ms e uma pressão de injecção de 3 bar,
que a temperatura obtida na superfície variava com a frequência de injecção. Desta forma, é referido
que com o aumento da frequência, aumenta a interacção entre sucessivas injecções o que contribui
para o aumento do fluxo médio total de calor removido. No entanto, para temperaturas abaixo de um
certo ponto (temperatura de Nukyiama) a eficiência do sistema diminui com o aumento da frequência,
o que pode ser associado com a diminuição da contribuição do calor latente de vaporização (havendo
uma deterioração da taxa de evaporação). Os autores concluem que as curvas de ebulição
dependem das condições da injecção (e.g. pressão, duração e frequência) e que, apesar do fluxo
médio total de calor removido aumentar com a frequência, a eficiência do SC diminui, sendo este
fenómeno atribuído ao excesso de líquido que fica na superfície entre injecções consecutivas.
Os resultados da presente tese apontam não para uma relação com a frequência mas sim com o
duty cycle2. De facto, em trabalhos posteriores (e.g. Panão e Moreira [18, 19]), os autores apresentam
o duty cycle como parâmetro fundamental destes sistemas.
Em Panão e Moreira [18] são estudados os efeitos dos parâmetros de funcionamento do sistema
(e.g. frequência, duração de pulso da injecção, pressão de injecção, distância do sistema à superfície
e temperatura inicial da superfície aquecida) na transferência de calor. É analisado o funcionamento
de um sistema intermitente e a capacidade deste para remover calor de uma superfície por mudança
de fase. Em [18] o duty cycle é definido como sendo a percentagem de tempo cíclico durante a qual o
líquido é injectado. Neste artigo, os autores referem que o escoamento de duas fases encontrado
possui uma natureza complexa e depende de diversos parâmetros do spray e das propriedades da
superfície (e.g. rugosidade), o que dificulta a determinação dos mecanismos que dominam a
transferência de calor. A instalação experimental de [18] comporta um disco plano de alumínio com
10 mm de raio, que é aquecido por uma resistência eléctrica e onde o spray incide
perpendicularmente. Os testes realizados recorrem a HFE7100 e acetona, sendo a temperatura
registada por 3 termopares K.
Também neste trabalho foram efectuadas medições simultâneas da velocidade e tamanho das
gotas do spray (recorrendo a um PDA), juntamente com medições de temperatura da superfície,
2 Considera-se como duty cycle a razão existente, no caso de sinais baseados em pulsos rectangulares,
entre a duração do pulso e o período do pulso [32].

16
tendo-se concluído que as características do spray não são afectadas pela frequência ou duração do
pulso da injecção.
Para avaliar a influência do duty cycle no processo de arrefecimento, em [18] recorreram a
HFE7100 para analisar o decaimento da temperatura de uma superfície previamente aquecida, ao
longo de ciclos consecutivos de spray. Mantendo a duração do pulso constante e variando a
frequência (10Hz, 20Hz, 30Hz até 60Hz), os autores concluíram que duty cycle maiores estão
associados a um potencial de arrefecimento mais elevado. Para ensaios com o mesmo duty cycle e
diferentes combinações de frequência e duração de pulso, os autores referem que frequências mais
elevadas e durações de pulso menores conduzem a um arrefecimento mais rápido, atingindo no
entanto a mesma temperatura final. Desta forma, baixas frequências de injecção de líquido e
reduzidos tempos de injecção minimizam a entropia gerada, sendo por isso mais eficientes no
arrefecimento da superfície. No entanto, à medida que estes valores aumentam, maior quantidade de
calor é extraída da superfície, ao custo de um menor desempenho. De acordo com [18], para baixas
frequências de injecção existe mudança de fase, uma vez que há tempo suficiente entre injecções
consecutivas para que o líquido vaporize. Ao aumentar a frequência é provável a formação de um
filme de líquido na superfície, pelo que o processo de arrefecimento é dominado pelo mecanismo de
troca de calor por ebulição do filme, provocando uma extracção menos eficiente de calor. Os autores
referem então que duty cycle mais elevados podem produzir uma resposta térmica mais rápida mas
com menor desempenho.
Num outro artigo, Panão e Moreira [19] (utilizando a mesma instalação) apresentam uma
descrição do spray intermitente com uma análise da sua resposta térmica e desempenho. Novamente
o duty cycle surge como parâmetro dominante, sendo que, valores reduzidos permitem a remoção de
calor por mudança de fase, enquanto valores mais elevados conduzem à formação de filme de líquido
na superfície. Os autores alertam ainda para o facto do sistema intermitente permitir poupanças
estimadas de líquido entre os 10% a 90% para eficiências de 10% e 45%. O trabalho comporta o uso
de dois líquidos com calores latentes de vaporização diferentes para analisar este parâmetro,
concluindo-se que líquidos com um calor latente de vaporização mais elevado permitem manter mais
facilmente a qualidade do potencial de arrefecimento.
Em [19] é referido que enquanto é sugerido que o melhor desempenho de SC é obtido na
presença de filme de líquido (conhecido por inibir a vaporização de líquido por abrandar a mudança
de fase) é também importante maximizar o fluxo de calor da superfície através da promoção de
mudança de fase o que, paradoxalmente, deveria evitar a formação de formação de filme de líquido.
Tal como em [18], os autores indicam que a frequência e duração da injecção não afectam as
características do spray. No entanto, enquanto em [18] foi referido que mantendo o duty cycle
constante e variando a frequência se verificava, para valores de frequência mais elevados, um
arrefecimento mais rápido, em [19] refere-se que, apesar do valor da frequência ser variado para os
mesmos valores, os decaimentos de temperatura para as várias frequências são semelhantes,
eliminado assim a influência da frequência.
17
Relativamente aos resultados relativos à pressão de injecção, enquanto em [18] os autores
referiram o aumento da pressão para aumentar o potencial de arrefecimento, em [19] sugere-se o uso
de pressões de injecção mais baixas (o mínimo para a formação de spray).
Algumas das diferenças verificadas entre a presente tese e os trabalhos de Panão e Moreira [18,
19] podem dever-se ao facto de os estudos realizados por estes autores se basearem numa
instalação com fluxo de potência constante imposto ao mesmo tempo que o spray utilizado na
presente tese é mais esparso.
Para permitir o estudo em condições de fronteira reais, i.e. fluxos de potência variáveis no tempo,
é necessário estudar perfis de potência de um processador durante um uso normal. Os perfis de
potência reportados na presente tese são reproduções dos medidos por Isci e Martonosi [26] que
mediram perfis de potência reais para um processador Intel® Pentium® 4, semelhante ao simulado
neste trabalho. O processador em questão implementa gestão de potência e monitorização de
temperatura do sistema, contando com 18 hardware counters a funcionar em paralelo. De acordo
com [26] actualmente a potência varia consideravelmente de aplicação para aplicação ao mesmo
tempo que os sistemas implementam métodos agressivos de gestão de frequência e potência,
tornando-se necessário testar sistemas reais. Para tal Isci e Martonosi [26] apresentam uma
metodologia para recolher e estimar dados sobre a potência dissipada, fazendo uso dos hardware
counters. Em [26] os autores apresentam medidas de potência reais para benchmarks e aplicações
reais. A abordagem escolhida foi o uso de multímetros e uma pinça amperimétrica para as medições
reais de potência e o uso dos dados fornecidos pelo sistema para produzir estimativas. A escolha da
pinça deveu-se o facto de este ser um método não intrusivo pelo que não é necessário alterar o
sistema a testar. Os hardware counters do processador foram analisados recorrendo a uma rotina
programada, sendo que a rotina garante um consumo de potência quase nulo e que pode ser
desprezado. Para validar as leituras, os autores criaram benchmarks específicos para determinadas
unidades do processador e, partindo de uma fotografia do die de um P4, os autores identificaram as
diversas unidades constituintes deste para puder estimar o consumo de cada uma. Foram criadas
equações que têm em conta os diversos elementos constituintes do processador, sendo a potência
total um somatório da contribuição de cada elemento e de um factor constante de potência em
repouso.
Isci e Martonosi [26] verificaram para os benchmarks SEPC gcc e vpr que a estimativa obtida é
razoável quando comparada com as medições reais e, analisando outros benchmarks, verificaram
que o sistema permitia obter resultados exactos, sendo as diferenças verificadas entre valores
estimados e reais de 3 W (média), não ultrapassando os 5.8 W (pior caso).
Para exercitar o processador os autores criaram o seu próprio benchmark, tendo ainda sido
testadas aplicações comerciais utilizadas em sistemas Linux.
Os perfis de potência utilizados no trabalho descrito na presente tese foram baseados no trabalho
enumerado uma vez que, como referido em [26], este trabalho conjuga medidas reais de potência
para um processador complexo, ao contrário da maioria dos trabalhos que se baseia em simulações.

18
Capítulo 3 - Modelo Experimental: Simulação de um Intel®
Pentium® 4 no encapsulamento de 423 pinos
3.1. Metodologia de análise
No presente capítulo serão apresentadas as abordagens seguidas até se ter alcançado o sistema
final. O sistema desenvolvido constitui uma ferramenta que permite testar as capacidades de
dissipação de diversos sistemas de arrefecimento, servindo de base comum de comparação.
Todos os modelos experimentais construídos tiveram um suporte, uma área de contacto entre a
fonte de calor e o sistema de arrefecimento (servindo de dissipador de calor) e uma fonte de calor.
3.2. Principais características do sistema a simular
Pretendia-se desenvolver um sistema capaz de simular o aquecimento de processadores reais,
tendo-se optado por simular o processador Intel® Pentium® 4 (P4) no encapsulamento de 423 pinos.
A escolha do P4 prende-se com o facto deste ser relativamente recente, tendo tido uma aplicação
em grande escala ao nível de computadores tipo desktop. Adicionalmente trata-se de um processador
que comporta algum nível de exigência em termos de gestão térmica, existindo ainda a vantagem de
já haver informação disponível sobre o seu funcionamento.
No manual do processador [33] é referido que o sistema utiliza um encapsulamento do tipo Pin
Grid Array (PGA) que inclui um dissipador (Integrated Heat Spreader – IHS) e o processador montado
num substrato de silício ou Organic Land Grid Array (OLGA) (Figura 3.1). O IHS funciona como
interface entre o processador e o sistema de arrefecimento e permite uma maior área de dissipação o
que conduz a uma libertação de calor mais eficiente [33]. A Figura 3.2, baseada em [33], apresenta
um esquema simplificado com algumas dimensões a considerar. Refira-se ainda que o IHS é
normalmente fabricado em cobre coberto com níquel [33].
IHS
Material interface TérmicaDie
OLGA
Figura 3.1 – Esquema do Processador P4, [33].
Relativamente à potência dissipada e à temperatura de encapsulamento, o processador em
questão apresenta uma gama que varia dos 48.9 aos 71.8 W com temperaturas máximas de
encapsulamento de 69ºC a 74ºC. A gama de frequências de funcionamento cujas características de
potência dissipada se enquadram no modelo criado vão dos 1.3 a 1.7 GHz com temperaturas
máximas de encapsulamento até 76ºC. Mais informação pode ser obtida no manual do processador
[33] onde se refere que as temperaturas apresentadas são valores extremos, sendo estes relativos a
um sensor habitualmente colocado no centro do encapsulamento.

19
Ao simular o comportamento do processador é preciso considerar três pontos fundamentais:
temperatura, variação de potência e resposta temporal. No caso da temperatura é necessário
alcançar temperaturas realistas, quando comparadas com um sistema real. No entanto, não é
suficiente reproduzir as temperaturas, sendo necessário que a resposta temporal do sistema seja
equivalente à de um sistema real, ao mesmo tempo que o sistema deve apresentar a capacidade de
variar a potência de forma a reproduzir as variações existentes num processador real, variações
estas que estão relacionadas com os programas em execução num dado momento.
Processador + IHS
OLGA
L
L
27.1027.0026.90L
Máx.
[mm]
Típ.
[mm]
Mín.
[mm]
27.1027.0026.90L
Máx.
[mm]
Típ.
[mm]
Mín.
[mm]
Figura 3.2 – Esquema com as principais dimensões de um P4, [33].
3.3. Construção do modelo experimental: evolução cronológica
Para reproduzir o comportamento térmico de um processador torna-se necessário ter em
consideração um conjunto de características a simular: é necessário reproduzir o IHS (placa de
interface térmica), a fonte de calor, bem como criar um suporte compatível com a temperatura do
sistema e com resistência mecânica necessária para suportar os sistemas de arrefecimento.
Para reproduzir o IHS foi escolhida uma placa de cobre com 27.5 x 27.5 mm2 e 2 mm de
espessura, valores similares aos indicados por [33] (Figura 3.2).
Baseado em estudos existentes na literatura, a primeira abordagem para a fonte de calor recorria
a resistências de potência. Tendo em consideração a dimensão da placa de interface (IHS), a
dimensão das resistências estava limitada, ao mesmo tempo que a potência dissipada tinha de
garantir que se atingiam temperaturas realistas. Analisando a oferta existente, optou-se por
resistências de 1.4Ω (5W) com 10% de tolerância. Para garantir um melhor aproveitamento do calor
gerado pela resistência e diminuir o volume total desta, o revestimento cerâmico exterior,
habitualmente existente, foi removido.
Relacionando a potência da resistência com o produto da sua tensão pela sua corrente e, pela Lei
de Ohm, relacionando a tensão e corrente com o valor da resistência, utilizou-se a informação do
fabricante (1.4Ω – 5W) e concluí-se que cada resistência não suportaria mais do que 2.65V.
Para identificar a gama de temperaturas que se podia alcançar foram realizados ensaios com uma
fonte de tensão de saída variável de 0 a 30 V (DC), com uma corrente máxima de saída de 10 A.
Recorrendo a um termopar tipo K, mediu-se a temperatura dos filamentos da resistência para várias
tensões de alimentação. Os testes foram realizados com uma resistência em contacto com o ar e
usando uma protecção em manta de fibra de vidro para diminuir as perdas de calor, tendo-se
verificado que não existia uma diferença assinalável entre os testes com e sem fibra de vidro.

20
Com estes testes foi possível atingir uma temperatura de 80ºC com 1.0V e de 120ºC com 1.2V,
(testes com duração de 20 minutos). Nesta fase construiu-se um primeiro modelo com 2 resistências
deste tipo como fonte de calor visto os valores de temperatura obtidos para uma resistência serem
aceitáveis. O modelo foi construído num suporte com 51.9 x 51.9 mm2 e 22.6 mm de espessura,
utilizando um material refractário resistente até aos 1500ºC. O suporte foi dimensionado de forma a
garantir que era possível acomodar diferentes sistemas de arrefecimento. No interior do suporte
foram criados alojamentos independentes para as resistências e sobre estes foi colocado um rebordo
de Mica para evitar que os filamentos da resistência entrassem em contacto com a placa de cobre
que serve de IHS. A placa de cobre foi colada sobre o suporte, tendo sido colocados três termopares
do tipo K em contacto com a superfície de dissipação. A Figura 3.3a apresenta os alojamentos para
as resistências e a Figura 3.3b o modelo após colado o dissipador. Para garantir uma correcta leitura
dos termopares foi utilizada massa térmica para melhorar o contacto entre os termopares e a placa
de cobre, garantindo-se que os termopares apenas estavam em contacto com a superfície de cobre.
(a) (b)
12
3
Figura 3.3 – Modelo inicial: (a) Colocação das resistências; (b) Disposição dos termopares.
Recorrendo à fonte de tensão variável aplicaram-se diversas tensões às resistências (em
paralelo), analisando a evolução da temperatura (termopar 2 da Figura 3.3b) ao longo de 60 minutos.
No final do teste as temperaturas medidas eram de 110ºC para uma tensão de 2.2V e 100ºC para
uma tensão de 2.0V. Foram ainda realizados testes com um sistema de arrefecimento a ar (Intel®
C25704-002) com a ventoinha desligada e ligada, utilizando massa térmica para garantir o contacto
entre o sistema de arrefecimento e o modelo experimental. Neste caso as resistências foram ligadas
em série para permitir que a alimentação do sistema fosse realizada por uma fonte de alimentação
equivalente às utilizadas em computadores. A alimentação fornecida foi de 5V (DC), com um máximo
de 23 A de corrente, pelo que cada resistência tem nos terminais 2.5V.
Analisando a temperatura no termopar 2 verifica-se que com a ventoinha ligada a temperatura
estabiliza nos 30ºC após 3 minutos. Para o caso da ventoinha desligada verifica-se que a subida de
temperatura é mais lenta quando comparada com os testes sem sistema de arrefecimento (o sistema
atinge os 50ºC aos 10 minutos quando anteriormente necessitava apenas de 3 minutos, para uma
tensão de 2.2V), sendo a temperatura final menor (80ºC aos 60 minutos).
Analisando os resultados foi possível concluir que o sistema não era capaz de reproduzir o
comportamento de um processador real visto que embora atingisse temperaturas elevadas, com o
sistema de arrefecimento existiam dificuldades em atingir as temperaturas esperadas. Também em

21
termos de resposta temporal, o sistema apresentava uma resposta de minutos e não segundos como
num processador real (um processador demora menos de 1 minuto a ficar irremediavelmente
danificado se não for correctamente arrefecido), ao mesmo tempo que a potência dissipada era
inferior à esperada quando comparada com o processador a simular. Estes resultados conduziram à
procura de uma nova fonte de calor.
Embora numa escala diferente, o elemento fundamental de um processador é o transístor. Deste
modo, decidiu-se usar transístores como fonte de calor visto estes apresentarem comportamentos
semelhantes aos verificados num processador. Ao utilizar um transístor pretendia-se que este estive
em contacto directo com o dissipador, tal como acontece num processador real, pelo que o transístor
tinha de ter uma área de contacto, tendo por isso sido escolhido um encapsulamento do tipo TO-220
(neste encapsulamento existe uma secção metálica directamente ligada ao chip).
O transístor escolhido foi do tipo TIP100 (neste caso um BD645) visto a dissipação deste ser
semelhante ao sistema a simular. O transístor é um NPN (T0-220) com dimensões semelhantes às
apresentadas em [33] para o core do processador e é baseado numa montagem de Darlington (é
necessário realçar que a dimensão referida é do core do processador e não do dissipador).
A montagem de Darlington inclui dois transístores bipolares (par de Darlington), que no caso do
BD645 estão colocados no mesmo encapsulamento. Este tipo de montagem permite, com uma
corrente pequena, controlar uma corrente significativamente maior pois os ganhos de corrente são
elevados devido ao facto de o ganho do primeiro transístor (β1) ser amplificado pelo segundo (β2)
correspondendo o ganho total da montagem ao produto de ambos (βTotal = β1β2). Consegue-se assim
controlar uma potência equivalente ao que seria dissipado por um processador.
Nos actuais sistemas, esta montagem comporta-se como um transístor normal, i.e., apresentando
apenas três terminais. Desta forma, o emissor do primeiro transístor está ligado à base do segundo,
estando os colectores de ambos interligados, constituindo assim o colector da montagem final. A
base da montagem corresponde à base do primeiro transístor e o emissor da montagem corresponde
ao emissor do segundo transístor (Figura 3.4). Relativamente ao transístor bipolar simples a diferença
está que em condução a tensão base-emissor, para transístores NPN, é de aproximadamente 0.7V,
enquanto que no caso da montagem de Darlington este valor é de 1.4V devido ao facto de as junções
base-emissor dos dois transístores se encontrarem ligadas neste tipo de montagem.
O transístor escolhido apresenta uma dissipação de potência máxima de 62.5 W [34],
apresentando uma resposta temporal enquadrada com o pretendido na presente tese.
Foi construído um suporte com 55.6 x 66.4 mm2 e 21.5 mm de espessura, utilizando para este
efeito o mesmo material do primeiro modelo experimental. No interior do suporte foi criado um
alojamento para o transístor e colocada uma ficha para ligação deste com o exterior. A Figura 3.5
apresenta o sistema. A placa de cobre utilizada para o IHS tem as mesmas características que no
primeiro modelo experimental. Tal como acontece nos processadores reais, para melhorar a
condução de calor, foi utilizada massa térmica entre o transístor e a placa de cobre, sendo a placa de
cobre colada sobre o suporte, recorrendo a cola para a fixar no modelo.

22
Foi criado um alojamento para inserir um termopar do tipo K (numa posição equivalente à do
termopar 2 em Figura 3.3b) que fica em contacto com a superfície de dissipação, utilizando-se massa
térmica para melhorar o contacto entre o termopar e a placa de cobre.
C1
E1
B1
C2
E2
B2
BDarlington
CDarlington
EDarlington
Figura 3.4 – Esquemático de uma montagem de Darlington.
(a) (b)
Figura 3.5 – Segundo modelo experimental: (a) Alojamento para transístor; (b) Sistema final.
O controlo da potência dissipada pelo transístor é assegurado pelo circuito da Figura 3.6.
i
V3
R1
R2
R3
13.5 kΩ
1.0 kΩ
0.15 Ω
BD645
1.4 V
12 V
Figura 3.6 – Esquema do controlo manual do segundo modelo experimental.
O circuito permite o controlo manual da potência, realizado por variação do potenciómetro. Neste
caso, estando o transístor na zona activa, este comporta-se como uma fonte de corrente controlada

23
pelo que o sinal de saída é proporcional ao sinal de entrada, comportando-se como um amplificador
[35]. Para este caso as correntes de base e colector são proporcionais (IC = βIB) e a corrente de
emissor, pelas leis de Kirchhoff, é igual à soma da corrente de colector e da corrente de base (IE =
IC+IB). Visto o ganho do transístor ser muito elevado, o valor de IB é muito reduzido quando
comparado com IC pelo que pode ser desprezado. Deste modo a corrente de emissor pode ser
considerada igual à de colector sendo a dissipação de potência expressa pela Eq. 3.1 que, em
conjunto com a Eq. 3.2, pode ser apresentada na forma da Eq. 3.4 (VDD = 12 V).
Assim, controlando a tensão V3, controla-se a potência dissipada no transístor BD645. A tensão V3
é controlada através de uma malha de realimentação baseada num amplificador operacional.
A tensão de saída do amplificador é aplicada à base do BD645 permitindo que a realimentação
negativa do emissor do Darlington actue. Esta realimentação iguala V3 à tensão obtida no divisor R2
que é aplicada à entrada não inversora do amplificador operacional.
A resistência R1, em conjunto com R2, define o valor máximo de V3 (Eq, 3.3) e consequentemente
da potência máxima (aplicando o valor máximo de V3 na Eq. 3.4).
O diodo de Zener assegura que em caso algum a tensão V3 seja superior a 1.4V, constituindo um
limitador adicional para a potência dissipada no BD645. Este limitador foi adicionado para a
eventualidade de a resistência variável apresentar um funcionamento incorrecto devido às partes
mecânicas envolvidas.
CCE IVP .= (Eq. 3.1)
IRV33
= (Eq. 3.2)
DDVRR
RV
MÁX
21
2
3+
= (Eq. 3.3)
3
33
3
)()(
R
VVVIVVP DD
DD
−=−= (Eq. 3.4)
O sistema foi testado recorrendo a uma fonte de alimentação de computador com a saída de 12V
(DC) e corrente máxima de 9A. Os resultados demonstram que, ao comparar ambas as fontes de
calor (transístor versus resistências) sem o uso de sistema de arrefecimento, a resposta temporal
melhorou visto ser agora possível atingir 70ºC em menos de 5 minutos com apenas cerca de 1/6 da
potência total (9.6W) do sistema. De facto, comparado o caso actual com o sistema de resistências
(sem sistema de arrefecimento) verifica-se que a temperatura final é superior, sendo a resposta mais
rápida.
Apesar de promissor, o segundo modelo experimental apresentava a desvantagem de, sendo o
transístor um componente sensível, qualquer anomalia provocar danos irreversíveis e obrigar à
reconstrução total do modelo. Para resolver esta situação decidiu-se criar um novo modelo
experimental totalmente desmontável para permitir o rápido acesso a todos os seus componentes,
mantendo o mesmo tipo de placa de cobre, com as mesmas dimensões, para realizar o IHS e o
transístor como fonte de calor.

24
De forma a obter um sistema desmontável recorreu-se a um novo tipo de material para o suporte
que apresenta características refractárias e suporta mais de 200ºC (valor aceitável visto que o
transístor ou um processador real não atingem temperaturas tão elevadas). Esta solução conduziu ao
modelo final apresentado na secção seguinte sendo que, antes de criar a versão final, foram
ensaiados diversos métodos de construção com o novo tipo de suporte com vista a melhorar o
funcionamento do sistema para o tornar mais flexível e prático.
3.4. Versão final do Modelo experimental: construção, controlo e
teste
Na versão final do modelo experimental, o IHS foi novamente reproduzido pelo uso de uma placa
de cobre com 27.5 x 27.5 mm2 e 2 mm, sendo utilizado um transístor do tipo BD645 como fonte de
calor. O modelo experimental apresenta 60 x 60 mm2 e 19.45 mm de espessura (Figura 3.7), tendo
sido criado um alojamento no suporte para incluir o transístor e as ligações deste ao exterior.
Dissipador
(IHS)Pasta Térmica
Fonte de
Calor
Termopares K
TemperaturaTemperaturaTemperaturaTemperaturaHumidade Humidade Humidade Humidade
RelativaRelativaRelativaRelativa
Higrómetro
(a) (b)
Figura 3.7 – Modelo Final: (a) Fotografia do sistema; (b) Esquema ilustrativo.
Neste novo modelo, e tendo por base os testes efectuados anteriormente, decidiu-se utilizar 3
termopares: 2 em contacto com o dissipador (IHS) e um em contacto directo com a fonte de calor.
Esta disposição de termopares permite analisar o aquecimento na superfície, verificando se o
arrefecimento é ou não uniforme, ao mesmo tempo que permite monitorizar a fonte de calor, evitando
danos e permitindo uma melhor compreensão acerca dos efeitos que os sistemas de arrefecimento
têm directamente na fonte de calor.
Recorrendo ao circuito da Figura 3.6 foi analisado o comportamento do modelo experimental.
Nesta fase decidiu-se testar a influência da massa térmica na condução do calor pelo que se
realizaram testes sem utilizar massa térmica entre o transístor e a placa de cobre.
Sem usar sistema de arrefecimento, colocou-se o modelo experimental a dissipar cerca de 1.20 W
e registaram-se as temperaturas nos 3 termopares ao longo de 20 minutos. Os resultados
apresentam uma temperatura média (aos 20 minutos) de cerca de 54ºC para os termopares de
superfície (a diferença entre estes é inferior a 1ºC) e cerca de 58ºC para o termopar da fonte de calor.
Para uma potência de 1.85 W registaram-se valores na gama de 76ºC para os termopares da
superfície e 85ºC para o termopar da fonte de calor e para testes com 2.42 W, mediram-se valores na
gama dos 90ºC para os termopares de superfície e 100ºC para o termopar da fonte de calor. Apesar
25
das potências apresentadas serem reduzidas face à potencialidade do modelo experimental, era
necessário garantir que as condições de testes não conduziriam a temperaturas acima das máximas
permitidas pelo transístor (visto os testes serem realizados sem sistema de arrefecimento).
De seguida realizaram-se os mesmos testes mas recorrendo ao Cooler Intel® C25704-002, sendo
que numa primeira fase não se colocou massa térmica entre o Cooler e a superfície de cobre.
Registaram-se valores na gama dos 30ºC (termopares da superfície) e 36ºC (fonte de calor) ao fim de
20 minutos para 1.20 W, temperaturas de 29ºC (superfície) e 38ºC (fonte de calor) para 1.85 W,
tendo-se registado valores semelhantes para a potência de 2.42 W.
Para testes com 7.53 W, mediram-se temperaturas na gama de 51ºC (superfície) e 83ºC (fonte de
calor) ao fim dos 20 minutos e para 10.10 W registaram-se 56ºC (superfície) e 98ºC (fonte de calor).
Uma rápida análise dos resultados sugere um correcto desempenho da fonte de calor.
Verifica-se ainda que em todos os casos a temperatura da superfície está habitualmente numa
gama de valores 10ºC abaixo da fonte de calor (exceptuando para a potência mais baixa).
De seguida repetiram-se os testes com o sistema de arrefecimento a ar (Cooler) mantendo o
contacto entre a superfície de cobre (IHS) e o transístor sem massa térmica mas colocando agora
massa térmica entre esta superfície e o sistema de arrefecimento. Para testes de 20 minutos
mediram-se temperaturas na gama dos 25ºC (termopares da superfície) e 30ºC (fonte de calor) para
1.20 W, 26ºC (superfície) e 36ºC (fonte de calor) para 1.85 W e 28ºC (superfície) e 40ºC (fonte de
calor) para 2.42 W. Para 7.53 W registaram-se temperaturas na gama dos 25ºC (superfície) e 58ºC
(fonte de calor) e para 10.10 W valores de 26ºC (superfície) e 72ºC (fonte de calor). Verifica-se neste
caso uma melhoria na temperatura, principalmente no caso de 10.10 W, com uma diminuição de
aproximadamente 30ºC (superfície) e 26ºC (fonte de calor).
Pode-se assim concluir sobre os benefícios do uso de massa térmica na melhoria da condução de
calor pelo que o modelo experimental foi modificado, tendo-se colocado massa térmica entre a fonte
de calor e a placa de cobre (IHS). Os testes anteriores foram repetidos e, com o uso de sistema de
arrefecimento com pasta térmica, mediram-se temperaturas de aproximadamente 29ºC (superfície) e
30ºC para 2.42 W e temperaturas de 30ºC (superfície) e 35ºC (fonte de calor), para 10.10 W. Os
resultados confirmam que o uso de massa térmica melhora a condução de calor pelo que esta foi a
configuração final escolhida. Foram também realizados testes com o sistema de arrefecimento a ar
para aproximadamente 60 W com uma duração de 2h (Figura 3.8). Os dados indicam que, apesar da
massa térmica ajudar, a resistência térmica de condução entre o IHS e a fonte de calor provoca uma
temperatura na superfície na gama dos 35ºC a 40ºC enquanto a fonte de calor está a cerca de 55ºC.
Os testes anteriores permitem ainda demonstrar o correcto desempenho do modelo experimental
em termos de resposta térmica e temporal (a fonte de calor ultrapassa os 50ºC antes dos 40
segundos). Verificou-se que a temperatura do sistema, sem qualquer sistema de arrefecimento, para
a potência máxima era superior a 100ºC em menos de 20 segundos, tendo os testes de ser abortados
para evitar danos.
Em todos os testes verifica-se que a superfície é aquecida/arrefecida de forma uniforme.
O sistema de controlo manual dificultava variações de potência, permitindo apenas testes com
fluxos de potência constante. No entanto, pretendendo-se simular um processador real era

26
necessário criar um sistema capaz de variar a potência do modelo experimental ao longo de um teste
de forma automática. Também a aquisição do valor da temperatura era realizada por leitores externos
mas ao criar um sistema de controlo único tornava-se possível monitorizar a temperatura para
garantir que os valores máximos nunca eram alcançados.
0
10
20
30
40
50
60
0 1000 2000 3000 4000 5000 6000 7000 8000
Tempo [s]
T [ºC]
Termopar Superfície 1
Termopar Interior
Termopar Superfície 2
Figura 3.8 – Testes realizados com uma potência de 60 W e com uso de Cooler.
Nesta fase foi adquirido um microcontrolador para controlo do modelo experimental. Pretendia-se
um sistema com saídas digitais e aquisição de dados para permitir a leitura automática da
temperatura. Deste modo optou-se por um sistema PIC 18F8722 da Microchip® em conjunto com uma
placa de demonstração da mesma marca. O microcontrolador escolhido, em conjunto com a placa,
comporta um cristal de 10 MHz (que com uma PLL interna permite obter 40 MHz), um cristal de 32
KHz (permitindo um relógio de tempo real) e uma interface série RS-232. O sistema suporta 70 portos
de I/O, 16 canais para o conversor A/D (10 bits de resolução), 2 timers de 8 bits cada e 3 de 16 bits
cada, comportando ainda um bootloader que permite a programação do sistema sem programador
específico, tornando-o num sistema flexível e prático. O microcontrolador apresenta 128 KBytes de
memória de programa e comporta memórias de dados (1024 bytes de EEPROM e 3936 bytes de
RAM). Apesar do controlador ser ligado a um computador para transmissão dos dados em tempo
real, a existência de memória de dados permite que facilmente se altere o programa de modo a
armazenar dados nas memórias.
O código criado foi dividido em funções para permitir flexibilidade e rápida modificação.
De seguida será descrita a programação do microcontrolador, a criação de circuitos auxiliares e o
desenvolvimento da interface a ser utilizada no computador.
3.4.1. Controlo: circuitos auxiliares
Analisando o circuito da Figura 3.6 verifica-se que o potenciómetro e a resistência de 13.5 kΩ
podem ser substituídos por um sistema de controlo que forneça à entrada do amplificador operacional
(AMPOP) o valor de tensão necessário para controlar V3 e consequentemente o modelo
experimental. Desta forma, foi criado um circuito DAC (Digital-to-analog converter) que tem como
entradas as saídas digitais do microcontrolador e, por meio da sua electrónica interna, tem na saída o
sinal a aplicar na entrada do AMPOP. Foi também alterada a resistência de 0.15Ω, passando para

27
0.1Ω, e a alimentação do sistema, passando a ser feita por uma fonte de alimentação estabilizada
com 15V. A Figura 3.9 apresenta um esquema do controlo automático do modelo experimental. Neste
caso foi mantida a designação da resistência R3 para uma fácil compreensão do diagrama face ao da
Figura 3.6.
Para controlar a potência decidiu-se utilizar uma palavra de 8 bits o que corresponde a 256 níveis
de potência, permitindo uma resolução de aproximadamente 0.2 W por bit. O valor da potência
dissipada continua a ser dado pela Eq. 3.4 sendo agora VDD = 15V.
PIC 18F8722
8
DAC
OUTPUT
1.4V
0.1Ω
BD645
VDD
R3V3
i
Figura 3.9 – Controlo Automático do modelo experimental.
O DAC utilizado não foi adquirido comercialmente mas sim dimensionado como apresentado na
Figura 3.10. Este baseia-se num circuito de resistências ponderadas com avanços em potências de 2
(R,2R,4R, ..., 2N-1R) consoante o peso do bit, considerando N bits. O microcontrolador é ligado ao
circuito sendo o bit de maior peso ligado na primeira posição. No AMPOP inicial (A1) deverá estar
uma resistência (Rref) cujo valor é metade da menor utilizada (R/2). A palavra digital é convertida numa
tensão dada pela Eq. 3.5, onde D representa a palavra digital representada na forma da Eq. 3.6 (b1
representa o bit de maior peso). A corrente da resistência do AMPOP (A1) é dada pela Eq. 3.7.
DVRIV oladormicrocontrrefsaídasaída −=−= (Eq. 3.5)
NNbb
D2
...2
1
1 ++= (Eq. 3.6)
NNoladormicrocontroladormicrocontroladormicrocontr
saída bR
Vb
R
Vb
R
VI
1212
...2
−+++= (Eq. 3.7)
Repare-se que se apenas existisse A1 a saída do sistema seria negativa (o AMPOP representa
uma montagem inversora). Adicionalmente, o valor na saída de A1 corresponde a um DAC que para
uma palavra toda activa no valor lógico de “1” dará a tensão de saída dos portos do microcontrolador,
i.e., 5V. Desta forma, o segundo AMPOP (A2) funciona como montagem inversora (tornado o sinal

28
positivo) e reduz os valores da saída de A1 para permitir a aplicação directa no AMPOP ligado à base
do transístor (recorde-se Figura 3.9).
Para garantir a precisão do sistema, todas as resistências utilizadas têm 1% de precisão.
Na saída do DAC foi colocada uma resistência (1 kΩ) para criar uma impedância de saída elevada
para evitar possíveis danos no circuito. PIC 18F8722
1kΩ
2kΩ
4kΩ
8kΩ
16kΩ
32kΩ
64kΩ
128kΩ
MSB
LSB
500Ω
1.2kΩ
100Ω
1kΩ
Vout
Figura 3.10 – Dimensionamento do DAC.
Os valores de resistência do DAC são elevados para garantir que a gama de valores de corrente
permitidos para os integrados utilizados e para as correntes máximas de saída dos portos digitais do
microcontrolador não sejam ultrapassadas.
Sendo este um sistema real, os AMPOP e as próprias saídas do microcontrolador não são ideais,
existindo desvios. Desta forma, o DAC foi dimensionado e posteriormente adaptado (variando os
valores das resistências) de forma a compensar eventuais desvios. Foram feitas medições na saída
do DAC afim de alcançar a maior precisão possível para a activação individual de cada um dos portos
do microcontrolador, bem como para compensar desvios do próprio AMPOP (compensação da
tensão de desvio de entrada VOS) e na resistência que se encontram ligada ao transístor (Figura 3.9).
Recorrendo a um multímetro foram analisadas as variações de corrente com as de tensão da
resistência de 0.1Ω para apurar o verdadeiro valor desta. Foram ainda realizados testes aos desvios
da tensão V3 e da tensão na entrada do AMPOP que se encontra na base do transístor (Figura 3.9).
Após programação do microcontrolador foi testada uma vasta gama de potências para monitorizar
os valores de potência do transístor, garantindo que estes estavam de acordo com o pretendido.
Os termopares traduzem a diferença de temperatura numa tensão, que por sua vez tem de ser
convertida em temperatura recorrendo a polinómios. No entanto, o valor de tensão dado pelos
termopares é reduzido (milivolts) pelo que o microcontrolador não é capaz de converter sinais tão
reduzidos. Tornou-se assim necessário criar amplificadores para os sinais dos termopares. Desta
forma, para adquirir o sinal foi necessário recorrer a amplificadores de instrumentação INA128 da
Burr-Brown (amplificadores de elevada precisão). Estes apresentam ganhos reguláveis e CMRR de
120 dB para ganhos superiores a 100, podendo ser utilizados na aquisição de dados.

29
A Figura 3.11 apresenta o circuito amplificador, sendo os pinos do integrado identificados pelo
circulo amarelo com o número a vermelho. Para cada termopar foi criado um circuito independente.
O ganho do circuito, devido a diferenças na resistência de 67Ω (que controla o ganho), é de 745
para 2 dos circuitos e 744 para o terceiro circuito, não existindo qualquer entrave visto que na
conversão do sinal para temperatura (por software) este facto foi tido em conta. Os amplificadores
foram calibrados com sinais constantes para confirmar os ganhos apresentados.
Protecção
Entrada
Protecção
Entrada
25kΩ
25kΩ
40kΩ
40kΩ 40kΩ
40kΩ1
2
8
3
4
5
6
7
67Ω
10kΩ
Termopar (+)
Termopar (-)
0.1µF
0.1µF
12V
12V
Vout
INA128
Figura 3.11 – Circuito amplificador do sinal de termopar.
Na Figura 3.11, a resistência de 10 kΩ (necessária para o funcionamento do circuito) na entrada
positiva do termopar garante a polarização DC (de forma a evitar flutuações) e os condensadores
garantem a filtragem da alimentação do sistema.
3.4.2. Controlo: programação do microcontrolador
Pretendia-se com o microcontrolador permitir a realização de três tipos de testes: potência
constante, perfil de potência e temperatura constante em relação a um dos termopares.
Nos testes de potência constante pretende-se um teste onde é imposto um determinado fluxo de
potência durante um período de tempo estipulado. Nos testes de temperatura constante, pretende-se
que durante um período de tempo o sistema monitorize a temperatura de um termopar de referência,
variando o fluxo de potência de forma a garantir que a temperatura desse termopar se mantêm no
valor predefinido. Nos testes com perfis de potência pretende-se que seja reproduzido um perfil
introduzido pelo utilizador por meio de um ficheiro auxiliar sendo que este ficheiro deve comportar
instantes de tempo e os valores da potência a dissipar em cada instante.
Todos os testes são definidos através de um programa de interface executado num computador,
sendo os parâmetros de cada teste enviados ao microcontrolador por RS-232 que por sua vez envia
para o computador, de segundo a segundo, a informação mais relevante de cada teste.
Sempre que ligado, o microcontrolador monitoriza constantemente a temperatura, de segundo a
segundo, nos 3 termopares garantindo que esta não excede um máximo estipulado. Caso o valor

30
máximo seja atingido o sistema bloqueia, cessando o fluxo de potência, até o utilizador fazer o reset
do sistema.
Todos os erros são reportados ao computador e os leds da placa auxiliar assinalam o normal
funcionamento, activando e desactivando um a um em série de segundo a segundo, ou identificam o
sistema bloqueado através da activação de todos os leds em simultâneo.
O programa do microcontrolador é executado numa só thread com interrupções de alta e baixa
prioridade e desactivação destas para acesso exclusivo a variáveis. Durante as interrupções o
controlo é passado para os vectores de interrupção onde deverão ser incluídas as rotinas para tratar
as respectivas interrupções, devendo estas rotinas ser o mais reduzidas possível.
Fazendo uso do cristal de 32 KHz foi desenvolvida em C uma rotina para obter um relógio de
sistema de segundo a segundo. Recorrendo ao Timer1 do sistema (T1CON) foi activada a escrita do
registo do timer em 2 operações de 8 bits cada, sendo também activado o oscilador do timer. Os bits
de controlo de interrupção do timer (registo IPR) foram configurados para activar uma interrupção de
sistema de alta prioridade para o caso de overflow. Desta forma, carregando os registos do timer com
um valor predefinido, existirá uma interrupção no sistema sempre que for detectado um overflow
(neste caso a cada 1.024 segundos). O controlo sobre o tempo de cada ensaio é mantido com
recurso a variáveis para registar os segundos, minutos e horas do sistema.
Os leds da placa de demonstração são activados sequencialmente, e uma vez que estes se
encontram ligados aos portos de saída D (PORTD) do microcontrolador e este é um porto bidirecional
de 8 bits, é necessário configurar o bit de controlo do porto para indicar o funcionamento em output
(TRISD = 0) [36]. Para activar/desactivar os leds recorre-se aos bits do vector LATD. Foi ainda criada
uma variável que é actualizada pela rotina do timer (variando de 0 a 7) e que indica qual dos leds
deverá ser alterado (on/off) em cada instante e outra rotina para iniciar os registos de controlo dos
portos de saída e o bit TRISD, sendo também iniciada a variável que será actualizada de segundo a
segundo.
Por fim existe uma rotina para activar todos os leds em caso de erro.
Para converter a temperatura do sistema é necessário ligar a saída dos amplificadores aos portos
de entrada analógicos do microcontrolador, utilizando-se 3 canais (um por cada termopar), sendo a
conversão realizada de segundo a segundo. A conversão é feita por pooling, apesar de o sistema
também a permitir por interrupção, tendo sido criadas variáveis para guardar o valor convertido.
Existe uma rotina que é chamada sempre que se faz uma conversão e que configura qual dos 3
portos (i.e., qual dos termopares) irá ser convertido, sendo configurado o tempo de aquisição, bem
como a configuração dos bits dos portos A (analógicos) que serão utilizados para leitura (o bit TRISA
de cada porto deve ser configurado a “1” para indicar que será input). O controlo do conversor é feito
recorrendo aos seus registos: ADRESH, ADRESL, ADCON0, ADCON1 e ADCON2 [36].
Em todas as conversões as tensões de referência são VDD da placa (5V) e VSS (0V).
Sendo o sistema por pooling é feita uma espera activa até assinalado o bit de conversão completa,
altura em que o valor é guardado na respectiva variável. O valor é guardado de modo a ser enviado
de volta ao computador, local onde a conversão de tensão em temperatura é realizada, tendo em
conta que o conversor A/D devolve o valor entre 0 e 1023 (10 bits de resolução).

31
A conversão de temperatura não é realizada pelo microcontrolador devido à complexidade dos
polinómios envolvidos o que iria afectar directamente o funcionamento do sistema.
Ao registar o valor convertido as interrupções são desactivadas para garantir o acesso exclusivo
visto que, não existindo mecanismos de acesso exclusivo do tipo semáforos ou mutex como no caso
de múltiplas threads, é necessário criar mecanismos de segurança que evitem a consulta de variáveis
em alteração devido ao facto de este ser um sistema com mudança de contexto (interrupções).
Os polinómios de conversão a usar necessitam do valor de temperatura ambiente para converter a
temperatura de forma exacta pelo que foi utilizado o sensor de temperatura TC74 incorporado na
placa de demonstração. Para a gama de valores da temperatura ambiente, o sensor tem um erro
inferior a 2ºC, sendo a resolução de 1ºC com uma conversão de 8 amostras/seg. [37]. A temperatura
é convertida numa palavra digital de 8 bits, sendo a comunicação com o sensor por I2C. O protocolo
I2C é um protocolo de comunicação série, que permite vários master e usa prioridades prefixadas que
são definidas pelo endereço de cada dispositivo [38].
O sensor TC74 funciona sempre como slave e permite comandos de configuração ou leitura de
dados sendo que o oitavo bit de endereço serve para indicar se a operação é de leitura ou escrita.
Visto que o microcontrolador permite comunicação I2C basta criar rotinas para aceder ao sensor. Para
recolher o valor da temperatura ambiente foram criadas duas rotinas para iniciar e configurar a
comunicação por I2C e para adquirir a temperatura registada pelo sensor. O microcontrolador
funciona neste caso como master e a Baud Rate utilizada está de acordo com os dados de [37] tendo
em conta a fórmula referida em [36]. Configurou-se ainda o bit de interrupção para desactivar
qualquer tipo de interrupção (PIR1bits.SSPIF=0 [36]). A rotina de leitura segue os passos indicados
pelo manual [37]: emissão do sinal de Start, endereço (último bit para escrita) e comando a efectuar
(leitura de dados). Reinicia-se o protocolo I2C e envia-se o endereço (último bit para leitura),
executando a leitura de dados. Após leitura a comunicação termina com NotACK e final de
comunicação.
Relativamente ao controlo do sistema foi criada uma variável que contém a tensão correspondente
ao valor máximo que pode ser registado nos termopares. Na abordagem seguida, visto a temperatura
ambiente não ter grandes variações, o valor de temperatura máxima do sistema foi registado e
convertido em tensão considerando uma temperatura ambiente de aproximadamente 20ºC. No
entanto, visto haver uma rotina para leitura da temperatura ambiente, o programa pode ser
modificado para que este valor máximo seja convertido no computador após consulta inicial sobre a
temperatura ambiente. Esta abordagem não foi seguida por implicar comunicações adicionais no
início do teste que, devido à pequena variação de temperatura ambiente, seriam desnecessárias.
No sistema existe uma variável com valores que correspondem a cada um dos estados possíveis:
inicial/sem teste (0), potência constante (1), temperatura constante (2) e perfil de potência (3).
Foi também criado um vector de 8 posições correspondente ao funcionamento dos portos de saída
de potência. Cada uma das entradas do vector varia entre 0 (off) e 1 (on).
Existe uma rotina para iniciar os portos de saída para controlo de potência, sendo colocado a zero
o vector de 8 posições, bem como os bits TRISXbits para identificar a situação de output (X
representa a letra do porto a activar) e os bits LATXbits para desactivar os portos.

32
Outra rotina criada é a rotina de bloqueio que desliga todas as interrupções garantindo assim que
a única maneira de sair da rotina é reiniciando o sistema (botão de reset da placa de demonstração).
Após a desactivação das interrupções, os portos de output são desligados para garantir 0 W. É ainda
criada na rotina a mensagem de erro a ser enviada ao computador para notificar o utilizador. Após
enviar a mensagem o sistema fica em espera activa num ciclo infinito. Tendo sido criado um protocolo
de comunicação, a rotina envia os dados da última leitura e o código de erro que permite ao
computador identificar o bloqueio por excesso de temperatura.
Para o controlo da temperatura foi criada uma rotina cuja função é analisar as temperaturas dos
termopares para comparar com o valor máximo permitido. Sendo a conversão de temperatura feita no
computador mas existindo um valor máximo de tensão, a rotina recorre aos dados convertidos,
comparando-os com o máximo permitido. Caso algum dos valores iguale ou ultrapasse esse máximo,
é activado o bloqueio de segurança.
Uma rotina comum aos diversos testes é a de controlo de potência visto que todos os testes se
baseiam na variação/atribuição de um valor de potência. A rotina, com base no vector de 8 posições,
decide quais os portos que devem ser activados. Ao existirem 256 níveis de potência, basta converter
o nível para o correspondente valor binário (8 posições no vector), o que permite o controlo directo
dos portos de saída a activar/desactivar.
A rotina para o teste de temperatura constante utiliza um switch-case, baseado no termopar de
referência, para comparar a temperatura actual do termopar com o valor de referência que veio do
computador, existindo um incremento/decremento do patamar de potência (de 0 a 255) caso a
temperatura seja inferior/superior ao pretendido. A rotina tem a particularidade de verificar, no início
do teste, se a temperatura pretendida é superior/inferior a um determinado patamar e, caso a
temperatura pretendida seja superior a 50ºC, automaticamente o sistema coloca na saída 30 W para
que se possa atingir o valor de temperatura pretendida mais rapidamente. Caso contrário o sistema
atribui 15 W. Em caso de erro ou falha, o termopar de referência é o da fonte de calor.
Foi também criada uma variável para o valor de tensão correspondente à temperatura constante
que o termopar terá de apresentar. Neste caso, e ao contrário do que acontece para a temperatura
máxima, antes do teste é feita a medição da temperatura ambiente que será usada no computador
para identificar o correspondente valor de tensão a enviar para o microcontrolador.
No caso dos testes com perfil de potência é necessário ir actualizando as entradas do perfil com
os valores de potência a utilizar. Desta forma o sistema verifica se o instante temporal actual
corresponde à próxima entrada do perfil e, caso corresponda, o valor da potência desta entrada é
convertida para binário e actualizado o vector de 8 posições, sendo chamada a função de controlo de
potência.
A função específica para o teste de potência constante apenas chama a função que actua
directamente sobre os portos de saída, visto o vector de 8 posições ser actualizado no início do teste.
Existe uma rotina central que controla o sistema e que se baseia num switch-case e na variável de
modo do microcontrolador para chamar o tipo de teste pretendido. De seguida, a rotina cria a
mensagem a enviar ao computador que contém informação sobre a duração do teste, tempo
decorrido, temperaturas dos termopares e ambiente. A rotina verifica ainda se a duração de teste

33
actual corresponde à duração final e, caso aconteça, reinicia os portos de output, alterando o modo
da placa para o estado normal. Caso não seja o final do teste basta enviar a informação recolhida.
Esta função de controlo é constantemente analisada pela rotina principal do microcontrolador.
Para comunicar com o computador foi implementada uma comunicação por RS-232 com Baud
Rate de 57600 e uma transmissão de 8 bits. Apesar de o microcontrolador permitir uma Baud Rate
superior, existia um erro superior entre o valor pretendido e o realmente obtido pelo que se optou por
esta Baud Rate que comporta um erro de apenas 0.94%.
Sendo a comunicação em 8 bits, optou-se por receber/enviar os dados no tipo char (8 bits).
Foi implementado um protocolo de comunicação de forma a permitir a troca de dados entre o
microcontrolador e o computador, sendo este baseado numa comunicação que terá sempre de seguir
o mesmo formato, sendo que o byte inicial (8 bits) de cada comunicação deve corresponder ao
código de início de comunicação, seguindo-se o comando (no caso da recepção no microcontrolador)
e uma resposta ao pedido (OK/ERRO), caso seja a recepção no computador. De seguida deverão ser
transmitidos os dados relevantes e a comunicação deve sempre terminar com o respectivo código.
Foi criado um conjunto de comandos que têm associados códigos únicos (neste caso entre 200 e
255, sendo este valor máximo imposto pelo uso de 8 bits).
Caso o protocolo não seja respeitado será transmitido para o computador uma mensagem de erro.
O protocolo criado permite a detecção de erros visto que deverá sempre seguir a mesma ordem.
Cada pedido recebido pelo microcontrolador só é tratado no final de cada mensagem (assinalada
pelo devido código) pelo que foram criados buffers para a recepção e envio de dados. Foi também
criada uma estrutura de dados que contém os buffers, uma variável para registar a dimensão utilizada
de cada buffer e flags para registar uma mensagem que está a ser recebida, para indicar erros, para
registar a recepção total da mensagem e para indicar a existência de um pedido já totalmente
recebido mas ainda não tratado.
A flag de mensagem a ser recebida aplica-se ao caso em que o código de início chegou mas o de
final ainda não (visto haver uma interrupção para a recepção do byte, retornando o sistema às
funções normais até recepção de novos dados).
A flag de erro serve para indicar que a mensagem recebida infringiu o protocolo.
A flag de pedido pendente indica à rotina principal que deverá chamar a rotina que trata dos
pedidos, visto não serem aceites novos pedidos enquanto houver pedidos pendentes.
Existe também uma rotina para iniciar a interface RS-232 que activa o bit de interrupção na
recepção de dados e desactiva a de envio. O sistema funciona em modo assíncrono, com 8 bits em
modo contínuo de recepção de cada byte. Configura-se ainda o registo que controla a Baud Rate e
iniciam-se os buffers e flags da estrutura criada. Para configurar a interface RS-232 utiliza-se a
função Open1USART da Microchip®. Para tratar da interrupção aquando na recepção de dados,
existe uma rotina que transfere o byte lido para o buffer de input (recorrendo à função Read1USART
da Microchip®), limpando em software a flag de interrupção. Nesta fase são feitas verificações acerca
da existência de alguma mensagem recebida (caso isso aconteça o byte lido é descartado e a função
retorna visto apenas se permitir o tratamento de um pedido de cada vez). No entanto caso não exista
nenhum pedido por tratar a rotina verifica se este primeiro byte corresponde ao código de início de

34
comunicação e, caso contrário, é assinalado o erro. Caso seja o código de início de mensagem, a flag
de mensagem a ser recebida é actualizada e o byte é copiado para o buffer de input, sendo a variável
que controla a dimensão deste actualizada. Caso a flag de mensagem já a ser recebida se encontre
activa, o byte faz parte de uma mensagem a ser recebida e é guardado no buffer de input. Neste
caso, a rotina verifica se há espaço livre no buffer. No final a rotina verifica se o byte lido corresponde
ao final de comunicação.
Existe também a rotina de envio de mensagem que, usando um contador, garante o envio de
todos os dados assinalados na variável de dimensão do buffer de output. A rotina baseia-se num ciclo
for e usa espera activa, com base no bit PIR1bits.TX1IF, para garantir que o envio do byte anterior
está concluído. O envio dos dados é realizado pela função Write1USART da Microchip®.
Para implementar o protocolo foi criada uma rotina que começa com a desactivação das
interrupções, visto ser necessário actualizar diversas variáveis do sistema. A rotina escreve de
seguida o código de início de comunicação no buffer de output visto que independentemente da
resposta (OK/ERRO) a mensagem para o computador terá sempre de começar com este código. De
seguida o sistema actualiza uma flag que indica que foi recebido um pedido, flag que serve para
evitar conflitos de envio e recepção simultânea, visto que o envio de mensagens apenas se realiza
quando esta flag está desactiva e uma segunda flag de envio está activa. É verificada a flag de erro
da comunicação para saber se o buffer de output é preenchido com o comando ou com o código de
ERRO e a resposta ao pedido (OK/ERRO).
Para processar o pedido, a rotina analisa o segundo byte recebido para verificar o comando
recebido e preenche o segundo byte do buffer de output com o código deste para confirmar que a
resposta foi ao pedido efectuado. No byte seguinte segue a resposta (neste caso OK). Nesta altura
verifica-se se o buffer de input contém mais dados para além do início de comunicação e do comando
visto que, caso não tenha, terá de ser assinalada uma situação de erro. Com base no código de
comando é utilizada uma sequência switch-case para tratar o pedido.
No pedido de potência constante é feita a recolha da potência que se pretende alcançar, da
duração do teste, verificando se os dados se adequam ao pretendido, e é chamada a rotina de
conversão de potência para binário. Em termos da recepção de potência existe uma particularidade.
A potência pode ter valores entre 0 e 255 pelo que podia ser enviada num só byte mas visto os
valores de 200 a 255 se encontrarem reservados para o protocolo, optou-se por dividir o envio da
potência em 2 bytes sendo que o primeiro leva um valor menor que 200 e o segundo leva zero ou o
suficiente para completar o nível pretendido de potência. Na recepção são recolhidos os dados e é
efectuada a conversão para binário. Após definidos os parâmetros do teste é chamada a rotina para
leitura da temperatura ambiente. Desta forma a resposta que será dada ao computador inclui já o
valor da temperatura ambiente na altura do teste permitindo assim uma conversão exacta dos valores
dos termopares. Por fim as variáveis do sistema são iniciadas, incluindo as do timer, para dar início
ao teste. A variável de modo é colocada a “1” para indicar o teste de potência constante.
No caso dos testes de temperatura constante é recolhido o valor de tensão de referência, bem
como uma letra para identificar o termopar de referência. De forma a obter o valor de tensão de
referência, o programa de interface necessita da temperatura ambiente pelo que neste tipo de teste o

35
programa de interface deverá primeiro executar um comando para pedir a temperatura ambiente.
Com base no valor recebido, o programa executa o pedido de temperatura constante. Tendo então a
tensão de referência e o termopar que deve ser analisado, recolhe-se do buffer de input a duração do
teste. Após recolher os dados, é chamada a rotina de leitura de temperatura do sensor TC74 para
actualizar o valor de temperatura ambiente a ser utilizado na conversão dos valores dos termopares.
No final, é iniciado o timer e as variáveis de controlo da duração do teste, sendo a variável de
modo colocada a “2” para identificar teste de temperatura constante.
Por fim, os testes de perfil de potência recebem os dados da entrada temporal e respectivo nível
de potência. Em vez de se transmitir todas as entradas optou-se por enviar cada entrada do perfil
individualmente para evitar estar a ocupar desnecessariamente a memória do microcontrolador.
Desta forma na primeira entrada, assinalada por uma flag enviada no pedido, é enviada a primeira
entrada do perfil e a duração do teste. Posteriormente, são efectuados pedidos de perfil de potência,
indicando na flag que já se trata de uma entrada de perfil. Na primeira entrada é feita a leitura da
temperatura ambiente, valor devolvido ao computador com a primeira resposta, sendo iniciado o timer
e as variáveis de duração do teste, bem como a variável de modo que é actualizada para “3”, valor de
teste com perfil de potência.
Para todo o tipo de testes, são verificados os dados de duração do teste e potência (ou valor da
temperatura a alcançar no caso dos testes de temperatura constante). Seja qual for o tipo de pedido
no final é enviada a resposta para o computador, sendo limpas as flags da estrutura da comunicação
RS-232. De segundo a segundo são enviadas para o computador as leituras de temperatura
(acompanhadas de uma identificação temporal), bem como o tempo já decorrido e duração total do
teste.
O ficheiro que contém a rotina principal (ficheiro main) contém uma flag que é actualizada pela
interrupção de timer e serve para indicar a chamada da função que trata do overflow e uma variável
para indicar que existem dados para enviar (variável que pode ser actualizada noutras rotinas).
O ficheiro main comporta a zona reservada para o vector de interrupção contendo apenas um
handler de interrupção onde se verifica o PIR1bits.TMR1IF ou PIR1bits.RC1IF referentes às flags de
interrupção por overflow ou recepção de um byte, respectivamente.
O ficheiro apresenta uma rotina para iniciar o sistema, rotina que chama internamente todas
rotinas de início de cada módulo: leds, RS-232, controlo de potência/portos de saída, timer e
comunicação I2C. Por fim a rotina main entra num ciclo while infinito onde constantemente verifica a
ocorrência de overflow do timer, existência de pedidos pendentes ou dados a enviar, tratamento de
todos os eventos temporizados (e.g. rotina de conversão dos termopares) e chamada da rotina de
controlo. Nesta rotina, caso esteja activa a flag de final de teste, é chamada a rotina do
microcontrolador que faz um reset interno ao sistema. Este reset garante que todos os valores voltam
ao seu valor padrão no final de cada teste, evitando assim qualquer erro.
No anexo 2 apresentam-se os principais fluxogramas relativos ao funcionamento das rotinas de
controlo implementadas no microcontrolador.

36
3.4.3. Controlo: programa de interface com o utilizador
Nesta secção será apresentado o programa de interface criado.
O programa de interface foi pensado para ser executado em sistemas Windows®. Tentou-se evitar
uma dependência directa de um sistema operativo específico mas, apesar de a linguagem C
apresentar portabilidade, o programa criado tem a necessidade de aceder directamente a interfaces
físicas do computador (RS-232 ou habitualmente denominada por porta série) pelo que se torna
necessário utilizar directivas do sistema operativo para aceder a estas. Por outro lado, devido à
variada oferta de emuladores, a criação de um programa num determinado sistema operativo já não
constitui actualmente uma limitação. Visto ter sido tomada esta opção foram utilizados comandos
específicos Windows® na execução do programa.
Ao contrário da secção anterior, em vez da denominação de rotina será utilizada
predominantemente a denominação de função para representar cada rotina/função criada, visto que,
ao contrário do microcontrolador, existem neste caso parâmetros que são passados às funções
aquando da sua chamada. No entanto o conceito de rotina/função serve sempre para identificar um
bloco de código criado com vista à realização de uma determinada acção.
Comece-se neste caso pela função main. Neste caso esta é uma função simples, servindo apenas
para chamar as funções dos menus e iniciar a comunicação por RS-232. A função chama o menu
inicial de apresentação que apresenta informação acerca dos autores e enquadramento do programa,
sendo de seguida chamada a função para iniciar a comunicação RS-232 e o menu principal que
permite controlar o programa. A partir deste momento o programa não retorna à função main visto
que, mesmo para terminar o programa, são executados comandos através das funções dos menus.
Relativamente aos menus foram criados quatro sem recepção de parâmetros na chamada tendo
ainda sido criada uma função para limpar a janela de terminal que neste caso, apesar de puder ser
executada com um ciclo for com o número de linhas do ecrã fazendo uso do comando printf (“\n”),
recorre ao comando system do C (que permite chamar rotinas específicas do sistema operativo) em
conjunto com o comando CLS do Windows® (que permite limpar todo o terminar).
Um dos menus criados foi o menu inicial que em vez de recorrer a printf usa o comando system
para chamar uma rotina exterior criada em Java. A rotina Java usa um ambiente gráfico, criando uma
classe do tipo pretendido e fazendo uso de JLabel e JButton. Como segurança é analisado o retorno
do comando system e caso este seja 1 (erro em Windows®) utiliza-se o printf para apresentar a
informação que não pode ser mostrada em Java.
Relativamente ao menu de apresentação, após chamar a rotina que limpa o terminar, é também
chamada uma rotina em Java, sendo verificado o código de retorno de system porque, fazendo uso
do comando System.exit do Java, é retornado neste código a opção escolhida pelo utilizador no
menu. Este menu recorre a um JButton denominado OK que servirá para sair e retornar o valor, tendo
JLabel para indicar as opções disponíveis e JComboBox para permitir ao utilizador escolher a opção.
O menu de apresentação apresenta as opções de menu de simulação, abertura da pasta dos
resultados (pasta criada com o programa onde todos os resultados são armazenados), ajuda (pdf
com ajuda sobre o programa), acerca de (aplicação Java para apresentar informação sobre os
autores), contactos e saída. Também neste caso será criado o menu com printf e scanf, caso a

37
aplicação Java falhe. No caso dos contactos o sistema abre automaticamente o cliente predefinido de
e-mail e preenche os campo de Para e Assunto de forma a permitir o envio de um e-mail a pedir
ajuda. Exceptuando-se a opção do menu de simulação e acerca de, todas as restantes recorrem aos
comandos system em conjunto com o comando START do terminal do Windows®.
O menu de simulação chama a rotina que limpa o terminar e usa o comando system para chamar
uma rotina Java. Também aqui o código de retorno de system serve para indicar a opção escolhida
pelo utilizador. Novamente o menu pode ser criado com JButton, JLabel e JComboBox. O menu de
simulação apresenta as opções de teste de potência constante, temperatura constante e perfil de
potência, bem como o menu de apresentação ou a saída do programa.
Em caso de falha do menu Java, existe em todos os menus uma condição que activa o respectivo
menu recorrendo a printf e scanf. Sempre que o utilizador tem de tomar decisões o sistema recorre a
ciclos while(1) para, caso o utilizador não escolha uma opção válida, a escolha volte a surgir até
selecção de uma opção correcta.
É necessário nesta fase referir que a comunicação se baseia no protocolo da secção anterior.
Para uma correcta gestão e controlo de erros foi criada uma função (equivalente a um handler)
que trata todos os erros possíveis da aplicação. A função erro recebe como parâmetros um código de
erro, uma string com uma mensagem indicativa do erro e dois apontadores (um para o ficheiro de
resultados e outro para o ficheiro de perfil de potência). Caso um dos ficheiros não se encontre em
uso basta passar NULL. A função erro baseia-se num switch-case que, com o código de erro, toma
as acções necessárias. Existem erros que encerram a aplicação e erros que não terminam a
aplicação, sendo que um erro também pode provocar o encerramento dos ficheiros mas não do
programa. Em todos os erros com encerramento da aplicação ou ficheiro, é gravado no ficheiro de
resultados uma mensagem com a causa que levou à interrupção do teste. Erros não fatais, i.e., que
não causam o encerramento do ficheiro e/ou do programa não serão guardados no ficheiro.
Em todos os erros o utilizador é sempre notificado por apresentação de uma mensagem no ecrã.
Os erros possíveis são: erro a abrir ficheiro de resultados (encerra o programa), erro a configurar a
porta RS-232 (encerra o programa), erro a receber/enviar na porta RS-232 (encerra o programa), erro
geral não fatal, erro não fatal mas com encerramento do ficheiro, erro na leitura do ficheiro de perfil de
potência e erro por excesso de temperatura no modelo experimental.
Para esta aplicação foram criadas duas funções de manipulação de ficheiros: uma para o ficheiro
de resultados e outra para o ficheiro que contém a informação sobre o perfil de potência a traçar.
Para o ficheiro de resultados, a função recebe um apontador para apontador que preenche após
abertura do ficheiro, sendo recolhido o nome que o utilizador pretende atribuir ao ficheiro (por scanf).
O nome é indicado sem extensão, sendo todos os ficheiros guardados numa pasta específica. Nesta
fase o utilizador tem a opção de manter a extensão atribuída (Microsoft Excel® - xls) ou alterar.
De seguida, o ficheiro é aberto com fopen no modo “w+”, criando assim um ficheiro vazio para
leitura e escrita. Caso o nome do ficheiro já exista na pasta este é sobreposto pelo novo ficheiro.
Após abertura, cria-se no novo ficheiro um cabeçalho com a data e hora actuais e nome do ficheiro.
Este cabeçalho permite ao utilizador uma rápida consulta do ficheiro e, tal como se verá de seguida,
ao indicar posteriormente outros dados relevantes, facilita a leitura do ficheiro de resultados.
38
Na função para abertura do ficheiro de perfil de potência o utilizador é informado que deverá
indicar o nome do ficheiro que contém o perfil, ficheiro que deverá estar no formato entrada temporal
e nível de potência. No entanto a leitura do ficheiro é executada por funções que configuram a
simulação sendo que a função de abertura apenas pede ao utilizador o nome e extensão do ficheiro
e, com o uso de fopen, abre o ficheiro no modo “r+”. Neste caso o ficheiro tem de existir e estar
colocado na pasta do programa ou então deverá ser indicado o path para este. Caso um ficheiro não
exista ou não o seja possível abrir/criar, será chamada a função de erro.
Relativamente à comunicação RS-232 foi criada uma função para iniciar e configurar a
comunicação (recorrendo às funções específicas disponibilizadas pelo Windows®). Para realizar
operações com a interface RS-232 é necessário ter um handler para a porta série, uma estrutura para
configurar a detecção de eventos e uma mascara para a configurar os eventos. Desta forma, a função
de configuração começa por perguntar ao utilizador que porta série deverá utilizar. Esta operação é
executada recorrendo a uma aplicação Java criada com JLabel, JComboBox e JButton (retornando a
opção escolhida) ou com printf e scanf em caso de erro na aplicação Java. Neste caso em particular,
ao contrário do que se sucede com os menus, se o utilizador fechar a aplicação Java sem indicar
uma resposta é assumido que se irá utilizar a porta série 1.
Em Windows® a porta série comporta-se como um ficheiro pelo que se usa o comando CreateFile
no modo GENERIC_READ e GENERIC_WRITE, indicando a opção OPEN_EXISTING (visto a porta
série já existir fisicamente). Nesta fase verifica-se o handler para garantir que este é válido. Para
configurar a porta utiliza-se uma estrutura auxiliar, recorrendo ao comando GetCommState, e
configura-se de seguida os campos a utilizar. Desta forma configura-se BaudRate (57600), ByteSize
(8), Parity (NOPARITY) e StopBits (ONESTOPBIT), sendo ainda necessário desactivar alguns
controlos de fluxo que o Windows® pode incluir na utilização da porta série. O passo seguinte
corresponde à actualização do estado da porta série.
Nesta altura devem ser configurados os timeout. Apesar de não obrigatórios, ao usar pooling (visto
não haver necessidade de programação paralela por threads) os timeout garantem que o programa
não ficará indefinidamente bloqueado caso exista algum erro na comunicação. Desta forma,
recorrendo-se ao comando GetCommTimeouts actualiza-se a estrutura que controla os tempos do
sistema e configuram-se os campos (em milissegundos) de acordo com o pretendido. Por fim deverá
ser utilizado o comando SetCommTimeouts para configurar os valores pretendidos.
Em todos os comandos, o código de retorno deve ser analisado para excluir a existência de erros.
Para além do método descrito, a Microsoft® disponibiliza outros métodos para configuração da
porta série mas alguns estão limitados visto não permitirem controlar todos os parâmetros ou não
serem compatíveis com todas as versões Windows®.
Para leitura da porta série foi criada uma função que recebe os dados, regista e apresenta estes
ao utilizador. O facto de não existir uma função exclusiva para tratamento de dados deve-se à
semelhança na recepção de dados de cada teste, existindo apenas diferenças pontuais que podem
ser resolvidas com condições, não havendo a necessidade de criar funções específicas. A função de
leitura recebe na sua chamada o comando que está a ser executado no programa e um apontador
para o ficheiro de resultados final onde serão guardados os resultados do teste. A função começa

39
com um ciclo e recebe byte a byte até encontrar um byte que corresponda ao início de sessão. Na
ausência de bytes para leitura, o programa fica em espera no ReadFile. No Windows® os dados são
colocados pelo sistema numa zona acessível pelo comando de leitura pelo que é possível indicar o
número de bytes que se pretende ler de cada vez. O código de retorno da função ReadFile é sempre
analisado para excluir erros. Após detectar o início de comunicação, analisam-se os dois bytes
seguintes afim de verificar se o primeiro corresponde ao código de comando e o segundo
corresponde a OK. Caso não corresponda é chamada a função de erro com o respectivo código.
Após garantir que o protocolo foi seguido, a função entra num ciclo while(1) do qual só se sairá ao
receber o código de final de comunicação. Esta solução não limita o tamanho da mensagem e
permite o envio/recepção contínuo de dados durante a duração do teste. Para identificar o final de
toda a comunicação ou apenas o final de um conjunto de dados (enviados de segundo a segundo),
existe um código diferente para final de comunicação ou final de linha. Desta forma, recebem-se os
bytes até se identificar o final de linha ou comunicação. Nesta fase verifica-se ainda se o byte
recebido contém o código do comando usado unicamente para consultar a temperatura ambiente
(comando auxiliar do teste de temperatura constante). Esta é uma das condições excepcionais
referidas para a qual uma simples condição permite recolher o valor da temperatura ambiente, sendo
neste caso feita a recolha do valor no modo char, i.e., com diversos caracteres onde cada um varia
de 0 a 9 e cuja sua localização representa o seu peso (unidades, dezenas, etc). Este método permite
receber os caracteres e compilar estes dados numa string única a converter com o uso de atoi (visto
a resolução de temperatura do sensor ser de 1ºC em 1ºC).
Os dados recebidos seguem todos a mesma estrutura independentemente do tipo de teste, sendo
que a primeira informação a receber é a da tensão dos termopares. Esta informação é também
recebida em char, tendo a particularidade de ser multiplicada no microcontrolador por 1000,
recolhendo assim dados desde o Volt até milivolt, sendo depois convertida por atoi e dividida por
1000. Neste caso para garantir que os dados são convertidos para float, apesar de não ser
necessário, é feito um cast para float na divisão por 1000. De seguida os dados são utilizados para
converter a tensão para temperatura recorrendo a polinómios específicos dos termopares baseados
em outros trabalhos já realizados, tendo sido efectuadas actualizações e comparações com outros
aparelhos de medida calibrados, para garantir a exactidão e precisão dos resultados.
Juntamente com o primeiro conjunto de dados recebidos é criado no ficheiro de resultados um
cabeçalho que identifica as leituras dos termopares e a temperatura ambiente para cada teste.
Todos os dados recebidos são apresentados no ecrã em tempo real, ao mesmo tempo que são
guardados linha a linha (por entrada temporal de segundo a segundo) no ficheiro de resultados. Cada
entrada do ficheiro contém uma coluna com o tempo da entrada em horas, minutos e segundos e
outra coluna com o tempo total em segundos (para facilitar a criação de gráficos).
No ecrã é apresentado a leitura dos termopares, o valor da temperatura ambiente, o tempo
decorrido de teste e o tempo que o microcontrolador indica como sendo o tempo máximo para o
respectivo teste. Para os testes com perfil de potência há uma verificação para identificar a
necessidade de enviar a próxima entrada ao microcontrolador, sendo que a função de leitura retorna

40
um código para essa situação. Nestes testes é indicado ao utilizador, no ecrã, a próxima entrada do
perfil a ser executada.
Durante todo o processo existem verificações de timeout e de situações de erro, incluindo as
mensagens de erro enviadas pelo microcontrolador.
O retorno da função de leitura varia consoante a saída é sem/com erros ou comandos especiais.
Na comunicação série existe ainda uma função de escrita que recebe como parâmetros um
apontador para o vector com os dados a enviar, o número de bytes a enviar e um apontador para o
ficheiro de resultados para que, em caso de erro, o possa enviar à função de erro para encerrar. A
função recorre ao comando WriteFile (Windows®) sendo feitas as verificações necessárias de retorno
para garantir que não houve erros. A função devolve o número de bytes enviados para permitir à
função que a chamou um controlo sobre a informação enviada.
Para configurar os testes a realizar foram desde logo definidos, utilizando define, os valores
máximos para a duração do teste, número máximo de entradas do ficheiro de perfil e a duração
mínima de cada teste. Estes valores, ao serem definidos com define, podem ser facilmente
modificados. Os valores escolhidos para a aplicação basearam-se nos testes efectuados, bem como
nos valores da literatura, nomeadamente os apresentados em [26] relativos a tempo máximo e o
número de variações dos perfis. Para configurar os testes foram criadas três funções (potência
constante, perfil de potência e temperatura constante), sendo cada função chamada pelo menu de
configuração.
A função de potência constante não recebe qualquer parâmetro inicial e começa por chamar a
função para criar o ficheiro de resultados para este teste. De seguida, recorrendo a printf-scanf, o
utilizador indica o valor de potência que pretende testar. O valor recolhido é verificado afim de
confirmar se está nos limites permitidos (0.2W a 60W) sendo de seguida convertido para um dos 256
níveis de potência (de 0 a 255). Para tal o valor é multiplicado por 255 e dividido por 60, sendo o
utilizador notificado do nível atribuído e da potência real a ser dissipada (resolução do sistema: 0.2W).
De seguida, por meio de printf-scanf, o utilizador indica a duração do teste sendo feita uma
verificação da validade dos dados introduzidos. Nesta fase é criado no ficheiro de resultados uma
nova linha que indica o tipo de teste e o valor de potência utilizado. O utilizador tem também nesta
altura a oportunidade de indicar o valor da humidade relativa para que este seja registado no ficheiro.
Se o utilizador tiver este valor, será criada uma linha com esta informação no ficheiro de resultados,
sendo o valor verificado e, caso esteja fora dos limites (de 0% a 100%), este será ignorado.
De seguida, a função prepara o pedido a enviar para o microcontrolador, sendo este composto
pelo código de início de comunicação, código de potência constante, nível de potência, duração do
teste (horas, minutos e segundos) e final de comunicação. De seguida é chamada a função de escrita
na porta série e inicia-se a leitura de dados. No final da comunicação a função de leitura retorna,
estando já os dados guardados no ficheiro de resultados pelo que basta encerrar o ficheiro que
novamente leva uma linha a indicar o final do teste, juntamente com o tipo de teste e valor de
potência. Após terminar o teste o utilizador tem a opção de ver os resultados e caso opte pela
visualização destes recorre-se a função system para com START iniciar o ficheiro. O utilizador poderá

41
sempre consultar os resultados mais tarde acedendo à pasta Result colocada na directoria do
programa.
Para o teste de temperatura constante é chamada a função para criar o ficheiro de resultados e,
recorrendo a printf-scanf, o utilizador introduz o valor de temperatura a alcançar (30ºC a 100ºC). No
entanto não se garante que esta temperatura seja de facto atingida uma vez que esta depende do
tipo de sistema de arrefecimento utilizado. Após recolha da temperatura verifica-se se o valor está
dentro dos limites, sendo depois recolhida a informação sobre o termopar a usar como referência (o
utilizador indica uma letra consoante o termopar pretendido). A letra introduzida pode ser maiúscula
ou minúscula.
Nesta fase o utilizador indica a duração do teste e é acrescentado no ficheiro de resultados uma
linha com o tipo de teste e valor de temperatura seleccionada, bem como o termopar de referência.
Também neste teste o utilizador é questionado sobre a humidade relativa.
De seguida, para saber qual a tensão de referência a enviar ao microcontrolador, é preciso medir
o valor da temperatura ambiente, sendo feito um pedido ao microcontrolador com o respectivo
comando. Tendo o valor da temperatura ambiente, é analisado o ganho do circuito pretendido,
consoante o termopar escolhido, sendo possível, recorrendo ao polinómio inverso, converter a
temperatura em tensão. Por fim é criado o pedido: início de comunicação, código de temperatura
constante, tensão de referência (também multiplicado por 1000 como quando se recebe do
microcontrolador), letra que identifica o termopar de referência e a duração do teste, terminando com
final de comunicação.
Após chamar a função de escrita, inicia-se a leitura de resultados até ao final da comunicação,
altura em que se insere no ficheiro de resultados uma linha a indicar o final de teste de temperatura
constante. Também neste teste o utilizador tem a opção de visualizar o ficheiro de resultados.
A função para configurar testes com perfil de potência também não recebe parâmetros na sua
chamada e começa por chamar a função para criar um ficheiro de resultados. De seguida chama a
função para abrir o ficheiro que contém o perfil de potência. Após receber o apontador para o ficheiro
de perfil, a função inicia a leitura do perfil e o preenchimento de um vector que irá conter as entradas
temporais (horas, minutos e segundos) e o nível de potência para cada entrada. Antes de criar o
vector é realizada uma primeira leitura do ficheiro para analisar o número de entradas e recolher os
dados sem comentários, isto porque o ficheiro de perfil pode ter comentários incluídos entre “$”,
sendo que toda a informação entre “$” será ignorada. Durante a análise do ficheiro é verificado se
existe algum comentário por encerrar ou se cada linha cumpre o formato imposto, i.e., entrada
temporal seguida de potência e um “;” no final (a potência tem de se situar entre 0.2W e 60W).
De seguida é alocado espaço de forma dinâmica para receber a informação final a ser analisada
e, com base nesta, é preenchido o vector com todas as entradas do perfil.
A primeira linha do perfil deve indicar a duração máxima do teste, tendo a particularidade da sua
potência ser indicada como 0 W para identificar que se trata da linha com a duração do teste. Para
não sobrecarregar o microcontrolador foi imposto um tempo mínimo entre cada entrada consecutiva
do teste de 1 segundo. Verifica-se também se o máximo permitido de entradas de perfil não é

42
ultrapassado ou se, após a linha com a duração, o ficheiro contém mais linhas visto que se não
contiver o perfil não está correcto pois só tem duração, sem entradas de perfil.
Cada linha é analisada para retirar os valores, verificando-se todos os dados recolhidos. Os
valores vão sendo convertidos de char para int (entrada temporal) e double (potência) através de atoi
e atof. O ficheiro é analisado até ao final ou até ultrapassar o número máximo de entradas.
Durante a análise do ficheiro de perfil é mantido um contador que indica no ecrã ao utilizador, em
caso de erro, em que linha do ficheiro de perfil é que este ocorreu, sendo este indicado com uma
causa provável. Cada linha é analisada para garantir que a entrada temporal é superior à anterior (o
ficheiro deve ser apresentado por ordem crescente temporal) e verificando se cada entrada não
ultrapassa o tempo máximo permitido nem a duração máxima do presente teste (indicada no início do
ficheiro). Acabada a análise do ficheiro, e caso não hajam erros, o ficheiro de perfil é encerrado e no
ficheiro de resultados é colocada uma linha com o tipo de teste que se vai realizar, bem como o perfil
aceite já com as potências reais e níveis de potência atribuídos. É também indicada a duração total
do teste. Tal como anteriormente, é possível registar a informação sobre a humidade relativa.
Nos testes de perfil e de potência constante o valor de potência é sempre convertido às decimas,
sendo depois convertido para nível de potência mais próximo, garantindo um erro inferior a 0.2 W.
O primeiro pedido enviado para o microcontrolador comporta o início de comunicação, código de
perfil de potência, flag que indica que se trata da primeira entrada, valor da primeira entrada do perfil,
duração do teste e código de final de comunicação. A partir deste momento a função entra num ciclo
que constantemente recebe dados e envia, sempre que necessário, novas entradas de perfil. Desta
forma, existem dois pedidos diferentes a enviar pela função de escrita: um no comando inicial e outro
para enviar cada entrada ao longo do teste. Cada comunicação enviada com entradas de perfil,
exceptuando a primeira, é composta por início de comunicação, código de perfil de potência, flag que
indica não ser a primeira entrada, entrada de perfil e código de final de comunicação. A cada envio de
entrada de perfil um contador é actualizado para garantir que se está na posição correcta do vector
que contém todas as entradas do perfil de potência.
Quando o teste termina, é escrito no ficheiro de dados uma linha que indica o final do teste e, tal
como nos restantes testes, o utilizador tem a opção de abrir o ficheiro para analisar os resultados.
No final todas as alocações de memória dinâmica são libertadas.
O anexo 3 apresenta alguns fluxogramas exemplificativos das principais funções utilizadas.
3.4.4. Controlo: testes finais
Após criação do controlo a nível físico e de software, foram realizados testes para garantir o
correcto funcionamento do sistema, incluindo testes de potência constante para diversas potências
afim de analisar os valores de tensão e corrente em diversos pontos do sistema, nomeadamente no
DAC e no modelo experimental. Relativamente ao funcionamento geral do sistema foram testadas
todas as funções, incluindo simulação de possíveis erros de comunicação ou introdução de dados.
Devido a restrições relativamente ao número de páginas deste documento e visto todos os testes
presentes nos resultados serem de potência constante e perfis de potência, apenas serão
apresentados nesta secção resultados para testes de temperatura constante.

43
A Figura 3.12 apresenta um exemplo de testes com temperatura constante (40ºC) relativamente
aos 3 termopares, sendo a Figura 3.12a referente ao termopar do interior (fonte de calor), a Figura
3.12b para o termopar de superfície 1 e a Figura 3.12c para o de superfície 2. Todos os testes foram
realizados com o sistema de arrefecimento a ar (Intel® C25704-002) e com massa térmica.
05
10
15
20
25
30
35
40
45
0 20 40 60 80 100 120 140 160 180 200 220 240 260 280 300
Tempo [s]
T [ºC]
Termopar Superfície 1
Termopar Interior
Termopar Superfície 2
(a)
05101520253035404550
0 20 40 60 80 100 120 140 160 180 200 220 240 260 280 300
Tempo [s]
T [ºC]
Termopar Superfície 1
Termopar Interior
Termopar Superfície 2
(b)
0
5
10
15
20
25
30
35
40
45
50
0 20 40 60 80 100 120 140 160180200 220 240260 280300
Tempo [s]
T [ºC]
Termopar Superfície 1
Termopar Interior
Termopar Superfície 2
(c)
Figura 3.12 – Testes de temperatura constante a 40ºC em relação ao termopar: (a) Fonte de
Calor; (b) Superfície 1; (c) Superfície 2.
Analisando os gráficos verifica-se que a função de temperatura constante funciona e que o método
de controlo escolhido é aceitável visto que o uso de um patamar inicial de potência na primeira
iteração e as actualizações de segundo a segundo permitem resultados numa janela temporal
reduzida. De facto, para o termopar da fonte de calor, é possível atingir a temperatura pretendida ao
fim de 1 minuto e 20 segundos e para os termopares de superfície a temperatura é atingida ao fim de
cerca de 2 minutos e 30 segundos (é normal que na superfície seja necessário mais tempo para
atingir o mesmo valor de temperatura). Os dados apresentados permitem voltar a confirmar que o
aquecimento da superfície é uniforme (como pretendido).
Como pode ser comprovado no capítulo de resultados, os testes de potência constante e perfil de
potência apresentam um andamento reprodutível (considerando as diferenças de temperatura

44
esperadas por variação das condições de teste). Relativamente aos testes de perfis foram testados
diversas durações e níveis de exigência.
É então possível afirmar que o sistema atinge temperaturas reais, com uma resposta temporal
razoável (em segundos), cumprindo os requisitos pretendidos: controlo e variação de potência e
resposta temporal similar ao caso real. De facto, nos testes de perfil de potência, verifica-se uma
resposta temporal quase imediata a qualquer variação de potência e em testes controlados de fluxo
de potência imposto, sem sistema de arrefecimento, verificou-se que, tal como no caso real, se o
sistema não for desligado em poucos segundos irá apresentar temperaturas muito elevadas.

45
Capítulo 4 - Sistemas de arrefecimento considerados e
metodologia experimental
Neste capítulo será apresentada uma breve descrição dos sistemas testados e da metodologia
experimental seguida sendo que os testes realizados comportam uma comparação directa entre um
sistema de convecção a ar e um sistema de arrefecimento a líquido por contacto indirecto
(Watercooling), bem como testes para um sistema baseado em Spray Cooling Intermitente.
No caso dos testes de SC não se pretende uma comparação directa com outros sistemas mas
antes analisar a aplicabilidade desta tecnologia e identificar os principais parâmetros a optimizar.
4.1. Sistemas de Arrefecimento de uso corrente
4.1.1. Sistema de convecção forçada a ar (Air-Cooler)
Os sistemas de arrefecimento de uso mais corrente utilizam um bloco de interface térmica em
contacto com o processador, do qual recebem, por condução, a energia térmica dissipada e por sua
vez a rejeita para o ambiente. Nos sistemas de convecção forçada a ar, este bloco de interface
térmica é arrefecido, tal como indicado no capítulo 1, por convecção com o ar forçado a circular por
intermédio de uma ventoinha habitualmente colocada no topo deste (Figura 4.1). A capacidade do
bloco de interface para difundir o calor é garantida utilizando-se na sua construção materiais
metálicos, os quais apresentam elevada condutibilidade térmica. Desta forma, a eficiência do sistema
depende, sobretudo, do dimensionamento da ventoinha e da resistência térmica de contacto entre o
processador e o bloco de interface, a qual deve ser mínima como ficou explicado no capítulo 1. Uma
solução passa pelo aumento da área de contacto (recordar a Eq. 1.4) ou pela utilização de ventoinhas
maiores (para aumentar o fluxo de ar), soluções que se encontram limitadas em termos de dimensão
máxima e ruído permitido. Para melhorar o contacto entre o bloco de interface térmica e o dissipador
do processador aplicam-se massas térmicas com elevados valores de condutividade térmica.
Dissipador
(incorporado no encapsulamento)
Material de Interface Térmica
Processador
(core)
Convecção Forçada de Ar
Dissipador do Sistema de
Arrefecimento
(exterior ao processador)
Bloco de Interface Térmica
Figura 4.1 – Funcionamento do sistema de convecção forçada a ar.

46
No presente trabalho o Cooler utilizado é um Intel® C25704-002. Este equipamento foi desenhado
para aplicação em sistemas Pentium® 4, sendo essa a principal razão para a escolha deste modelo.
O Cooler é alimentado por uma fonte de tensão de computador, funcionando nas mesmas
condições a que está sujeito quando aplicado a um sistema real. Em todos os testes realizados, o
contacto entre o sistema de arrefecimento e o modelo experimental (IHS) foi garantido pelo uso de
massa térmica AKASA Pro-Grade 460.
4.1.2. Sistema de contacto indirecto com líquido (Watercooling)
Nos sistemas de Watercooling, o arrefecimento do processador é assegurado por um fluxo de
água que circula num bloco em contacto com o dissipador térmico. Um sistema deste tipo é
normalmente constituído pelo bloco que permite, no seu interior, a circulação de água, um
reservatório de líquido, um radiador externo onde a água rejeita o calor recebido do processador para
o ar ambiente e uma bomba de circulação. A Figura 4.2a mostra esquematicamente as ligações deste
tipo de sistema: a água sai do reservatório, passa pelo radiador (onde troca calor com o ar com
auxilio de ventoinhas) e entra no bloco de interface térmica para o arrefecer. Este, por condução
térmica, arrefece o processador, sendo a circulação de água garantida pela bomba instalada entre o
reservatório e o radiador.
(a) (b)
Figura 4.2 - Sistema de Watercooling: (a) Esquema de ligações; (b) Bloco de arrefecimento.
Apesar de também este sistema continuar limitado pelos materiais utilizados, a utilização de água
como fluido de transferência térmica apresenta vantagens. A água apresenta uma condutividade
térmica e um calor específico superiores aos do ar, razão pela qual apresenta um coeficiente de
transferência de calor por convecção superior (h) e, portanto, melhores condições para a
transferência de calor por convecção (Eq. 1.5). Por vezes são ainda utilizados, como substituto ou
aditivo, líquidos refrigerantes com o intuito de melhorar as capacidades de remoção de calor do
sistema. Outra vantagem apresentada por alguns fabricantes destes sistemas é a diminuição do ruído
já que a ventoinha do radiador é, normalmente, mais silenciosa do que as dos sistemas de convecção
a ar.
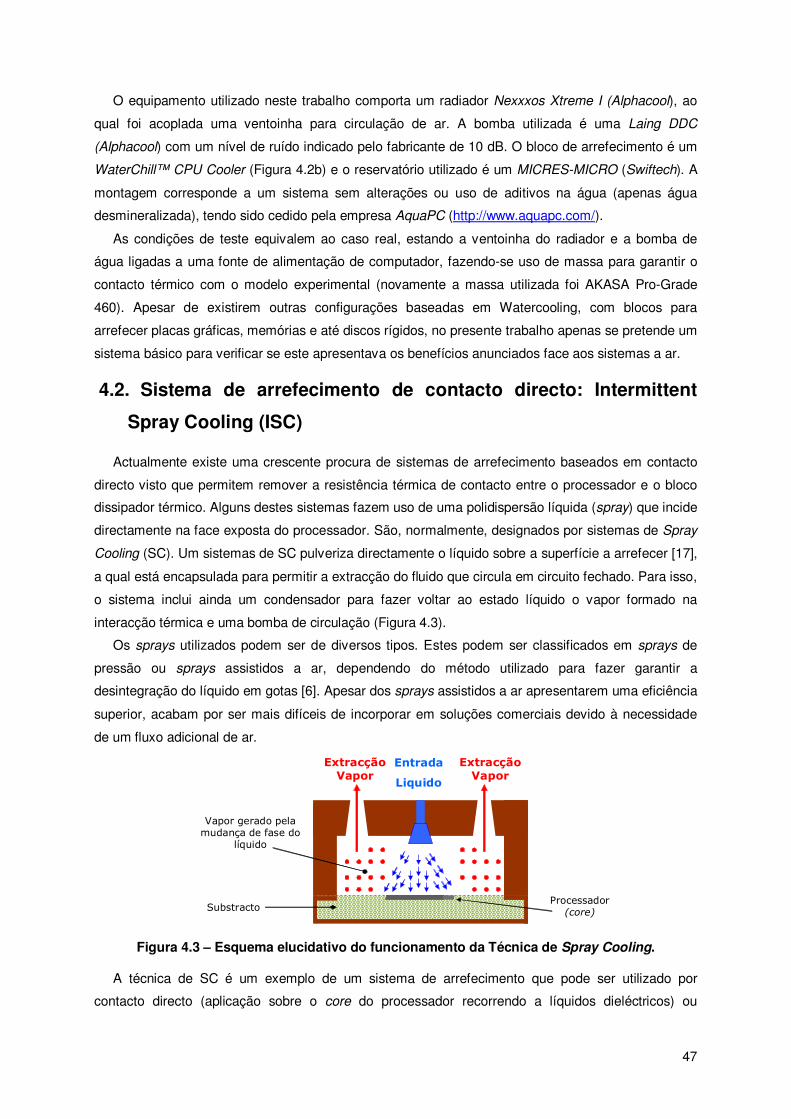
47
O equipamento utilizado neste trabalho comporta um radiador Nexxxos Xtreme I (Alphacool), ao
qual foi acoplada uma ventoinha para circulação de ar. A bomba utilizada é uma Laing DDC
(Alphacool) com um nível de ruído indicado pelo fabricante de 10 dB. O bloco de arrefecimento é um
WaterChill™ CPU Cooler (Figura 4.2b) e o reservatório utilizado é um MICRES-MICRO (Swiftech). A
montagem corresponde a um sistema sem alterações ou uso de aditivos na água (apenas água
desmineralizada), tendo sido cedido pela empresa AquaPC (http://www.aquapc.com/).
As condições de teste equivalem ao caso real, estando a ventoinha do radiador e a bomba de
água ligadas a uma fonte de alimentação de computador, fazendo-se uso de massa para garantir o
contacto térmico com o modelo experimental (novamente a massa utilizada foi AKASA Pro-Grade
460). Apesar de existirem outras configurações baseadas em Watercooling, com blocos para
arrefecer placas gráficas, memórias e até discos rígidos, no presente trabalho apenas se pretende um
sistema básico para verificar se este apresentava os benefícios anunciados face aos sistemas a ar.
4.2. Sistema de arrefecimento de contacto directo: Intermittent
Spray Cooling (ISC)
Actualmente existe uma crescente procura de sistemas de arrefecimento baseados em contacto
directo visto que permitem remover a resistência térmica de contacto entre o processador e o bloco
dissipador térmico. Alguns destes sistemas fazem uso de uma polidispersão líquida (spray) que incide
directamente na face exposta do processador. São, normalmente, designados por sistemas de Spray
Cooling (SC). Um sistemas de SC pulveriza directamente o líquido sobre a superfície a arrefecer [17],
a qual está encapsulada para permitir a extracção do fluido que circula em circuito fechado. Para isso,
o sistema inclui ainda um condensador para fazer voltar ao estado líquido o vapor formado na
interacção térmica e uma bomba de circulação (Figura 4.3).
Os sprays utilizados podem ser de diversos tipos. Estes podem ser classificados em sprays de
pressão ou sprays assistidos a ar, dependendo do método utilizado para fazer garantir a
desintegração do líquido em gotas [6]. Apesar dos sprays assistidos a ar apresentarem uma eficiência
superior, acabam por ser mais difíceis de incorporar em soluções comerciais devido à necessidade
de um fluxo adicional de ar.
Processador(core)
Substracto
Extracção Vapor
Extracção Vapor
Entrada
Liquido
Vapor gerado pela mudança de fase do
líquido
Figura 4.3 – Esquema elucidativo do funcionamento da Técnica de Spray Cooling.
A técnica de SC é um exemplo de um sistema de arrefecimento que pode ser utilizado por
contacto directo (aplicação sobre o core do processador recorrendo a líquidos dieléctricos) ou

48
contacto indirecto. Neste trabalho, o sistema utilizado pulveriza directamente o líquido sobre o modelo
experimental (na superfície de cobre – IHS), mas não directamente na fonte de calor.
A eficácia desta técnica depende das propriedades do líquido utilizado e das condições de
funcionamento do spray. A maior dificuldade está na gestão do fluxo de líquido que garanta as
maiores taxas de arrefecimento em todas as condições de funcionamento do processador. A
utilização de sprays intermitentes é uma tecnologia (Intermittent Spray Cooling Systems – ISCS) que
vem permitir optimizar a gestão do fluxo de líquido, através de uma programação adequada dos
tempos de injecção e dos tempos mortos entre injecções sucessivas, e.g. Panão e Moreira [18, 19],
Panão et al. [31].
Neste trabalho é desenvolvido um sistema de injecção para ser utilizado num ISCS. O método
utilizado tem por base o sistema apresentado por Vu et al. [39]. Apesar de num contexto diferente,
estes autores recorrem a uma válvula de solenoide igual à utilizada pela Candela (GentleLASE) nos
seus equipamentos. Neste trabalho é utilizada uma válvula Parker 099-0169-900 cedida pela Candela
Portugal. Foi ainda desenhado e construído um circuito electrónico auxiliar para fazer a abertura e o
fecho da válvula e para garantir o controlo da intermitência – frequência e duração de cada injecção.
O circuito criado está representado na Figura 4.4 e baseia-se num transístor MOS que serve como
interruptor controlado pelo gerador de sinais ligado à Gate deste. O transístor foi escolhido de modo a
garantir uma resposta rápida, tendo-se optado por um do tipo NPN High Speed Switch.
12VVálvula
(12Ω)
2Ω
5.1kΩ
Gerador
de Sinal (5V)
NMOS
D
S
G
Figura 4.4 – Circuito de controlo da válvula a utilizar no Spray.
Assim sendo, existe uma fonte de alimentação DC de 12V para a válvula, sendo que, em
funcionamento, a válvula comporta-se como uma resistência. Deste modo, o circuito permite a
passagem da corrente sempre que a tensão na Gate do transístor permitir que este deixe a zona de
corte. Uma vez que a tensão aplicada na Gate do transístor serve de sinal de controlo, é gerado um
sinal rectangular onde, pelo controlo da duração do pulso e da frequência, é possível controlar a
intermitência.
Em relação ao atomizador a utilizar, e após testar diversas soluções, optou-se por adaptar um
atomizador de aplicação médica na válvula para obter spray (com um diâmetro de saída de 250 µm).

49
A pressão do líquido a montante da válvula é o parâmetro de funcionamento que, em conjunto
com o diâmetro do injector (250 µm), determina a qualidade de atomização e, consequentemente, as
características do spray que vai arrefecer o dissipador térmico. Neste sentido, foram conduzidos
diversos testes para se optimizar a pressão de injecção. A Figura 4.5 apresenta imagens obtidas com
uma câmara de alta velocidade (Motion Corder Analyser – Series SR – Model PS-120) do spray de
um líquido dieléctrico (HFE7100 fabricado pela 3M) quando é descarregado a 2.2 bar de encontro à
placa de cobre que serve de IHS no modelo experimental. Nestas imagens a superfície está à
temperatura ambiente e o spray incide com um ângulo de inclinação. Nesta fase apenas se pretende
caracterizar a qualidade da atomização e a área de impacto coberta pela dispersão de gotas, pelo
que não é absolutamente necessário centrar o spray relativamente à superfície. No entanto, testes
posteriores garantiram que era possível, alterando o posicionamento do spray, cobrir toda a área
aquecida. De facto, como se verá nos resultados, a disposição do spray face à superfície revelou-se
de extrema importância.
A Figura 4.5a permite identificar um spray esparso com um cone bem definido (linhas laranja),
apresentando assim aplicabilidade em sistemas de arrefecimento. Na Figura 4.5b observa-se a
ocorrência de atomização secundaria (linhas azuis) associada à desintegração causada pelo impacto
das gotas com a superfície e que se devem em grande parte ao facto de a superfície estar fria e não
haver vaporização de líquido.
(a) (b)
Figura 4.5 – Spray com HFE7100 a 2.2 bar: (a) Atomização Simples; (b) Atomização Secundaria.
Na sequência destes testes foi dimensionado um sistema de alimentação de líquido que faz uso
de um depósito pressurizado. O líquido dentro do depósito é pressurizado com ar proveniente de um
compressor e alimentado ao injector a pressão constante controlada por uma válvula controladora de
pressão e monitorizada num manómetro analógico colocado na linha de ar comprimido (ver Figura
4.6). Um manómetro colocado na linha de alimentação de líquido ao depósito, imediatamente a
montante da válvula injectora, permite ter em conta as perdas de pressão e ter uma leitura correcta
da real pressão de atomização.
Para garantir um posicionamento preciso do sistema foi instalado um sistema micrométrico de três
eixos que permite deslocações controladas, na escala de décima de milímetro, no eixo XX, YY e ZZ.
A válvula é montada de forma a deslocar-se ao longo do eixo ZZ sendo o modelo experimental
colocado numa plataforma que permite os deslocamentos XX e YY. A posição central XX=YY=0
corresponde ao spray alinhado com o centro da superfície de cobre do modelo experimental.

50
Figura 4.6 – Instalação Experimental.
4.3. Metodologia Experimental
4.3.1. Sistemas de uso corrente
Os sistemas de arrefecimento correntes foram testados com o modelo alimentado, não só a
potência constante à semelhança do que é feito na maior parte dos estudos publicados na literatura
(e.g., Bash et al. [21], Panão e Moreira [18, 19], Mudawar e Estes [22] ou Bonner III et al. [30]), mas
também com perfis de potência variável no tempo que simulam condições de funcionamento mais
próximas das reais. Desta forma, ambos os sistemas em avaliação foram submetidos a testes de
potência constante para 15 W, 30 W, 45 W e 60 W com uma duração de 5 minutos por teste. Testes
preliminares tinham mostrado que as variações de temperatura ao fim de 5 minutos são mínimas e
que, portanto, o sistema estaria termicamente estabilizado, como se mostra na Figura 3.8 para um
teste realizado com uma potência de 60 W ao longo de 2 horas.
O estudo que aqui é apresentado difere da maior parte dos publicados na literatura (veja-se a
discussão do capítulo 2) nos quais o líquido é injectado sobre a superfície a arrefecer depois de esta
ter atingido o equilíbrio térmico. No presente caso, a potência térmica dissipada é feita variar
subitamente quando o sistema de arrefecimento está em condições de funcionamento estacionárias e
é registada a subsequente evolução térmica da superfície. Esta metodologia aproxima-se mais das
condições reais de funcionamento, nas quais os processadores são arrefecidos a partir do momento
em que são iniciados, passando rapidamente da temperatura ambiente para temperaturas de
funcionamento mais elevadas, à medida que se vão executando programas, sendo a função do
sistema de arrefecimento garantir que a temperatura final não excede os máximos permitidos.
Todos os resultados apresentados resultam de um conjunto alargado de testes para as mesmas
condições, comprovando assim a reprodutibilidade dos resultados obtidos. Em todos os testes a
temperatura ambiente e humidade relativa da sala são registadas.
Outra das limitações apresentadas pelos estudos já realizados sobre sistemas de arrefecimento é
o facto de estes utilizarem fluxos de potência constantes, situação que raramente ocorre nos
processadores reais. Apesar de Cader et al. [13] terem aplicado variações temporais no estudo de
sistemas de arrefecimento, estes não reproduzem condições reais pelo que, no presente trabalho, os

51
sistemas de arrefecimento também foram testados com um perfil de potência variável no tempo,
como o que se mostra na Figura 4.7. Este perfil é a reprodução de um benchmark de treino criado por
Isci e Martonosi [26] e foi escolhido por representar um conjunto de situações reais e exigentes a que
um processador está sujeito durante o seu funcionamento. Este facto torna o perfil uma boa base de
comparação dos diversos sistemas de arrefecimento.
0
10
20
30
40
50
60
0 10 20 30 40 50 60 70 80 90 100 110 120
Tempo [s]
Potê
ncia [W
]
Figura 4.7 – Perfil de Potência testado, [26].
No perfil é possível identificar quatro instantes distintos. O primeiro vai do início do teste até
aproximadamente 45 segundos e corresponde a um código que envolve cálculos computacionais em
ciclo entre inteiros e números de virgula flutuante. O segundo, dos 45 aos 60 segundos, corresponde
a um benchmark que gera hits de cache de nível 1. O terceiro segmento vai dos 60 aos 94 segundos
e representa um benchmark criado para gerar Taken Branches. Por fim, é provocada uma variação
rápida de aproximadamente 30 W, levando o sistema a uma situação limite. O trabalho de Isci e
Martonosi [26] permite verificar que as aplicações reais testadas (nomeadamente o programa de
cálculo Gnumeric) apresentam segmentos com um comportamento similar a este último segmento do
perfil testado e uma análise geral dos perfis presentes no mesmo trabalho permite identificar neste
perfil comportamentos similares com a maioria dos restantes casos apresentados.
4.3.2. Intermittent Spray Cooling (ISC)
Pretende-se também analisar as potencialidades do ISC e ao mesmo tempo identificar os
parâmetros mais importantes a optimizar no desenvolvimento de um sistema de uso comercial.
A metodologia seguida consiste no estudo de cada parâmetro isoladamente, i.e., apenas um
parâmetro varia em cada ensaio. Para identificar a gama inicial de valores a ser utilizada, foram
realizados testes de potência constante. Nestes testes foi identificada a gama de valores para o sinal
de controlo da válvula e a distância a que o atomizador deve ser colocado da superfície. Foram ainda
consideradas diversas pressões de injecção, tendo-se visualizado o spray resultante, como se mostra
na Figura 4.5, para identificar a gama de pressões a ser utilizada. Desta forma verifica-se que existe
um patamar superior imposto pela capacidade da própria válvula (aproximadamente a 6 bar) e um
patamar mínimo a partir do qual a atomização é fortemente deteriorada. A análise efectuada permite
concluir que acima dos 2.0 bar é possível obter um spray com características adequadas para ser
aplicado como sistema de arrefecimento.
Após a realização dos testes de potência constante, todos os restantes testes foram efectuados
com o perfil de potência apresentado na Figura 4.7.

52
O modelo experimental é mantido à temperatura ambiente até o sistema de arrefecimento ser
ligado no início do teste (como no caso real). A evolução da temperatura começa então a ser
monitorizada nos três termopares ao longo da duração do teste, ao mesmo tempo que o software do
microcontrolador garante que esta não ultrapassada o máximo permitido.
Tal como referido, um dos parâmetros testados foi a frequência do sinal que controla a válvula
tendo-se optado por, após os testes iniciais de potência constante, realizar testes para 0.8Hz e 2.6Hz
visto estas frequências apresentarem uma diferença de 3.25 vezes entre si, o que foi considerado
suficiente para estudar a influência deste parâmetro. Outro parâmetro analisado foi o duty cycle do
sinal que controla a válvula, sendo este conceito definido como a razão entre a duração do pulso e o
período do pulso, considerando um sinal baseado em pulsos rectangulares. Esta definição encontra-
se de acordo com a fornecida pela Alliance for Telecommunications Industry Solutions [32]. Foram
estudados 3 duty cycle distintos: 23.6%, 57.7% e 75.2%. O valor de 23.6% corresponde ao valor
próximo do mínimo encontrado nos testes de potência constante, o valor de 57.7% representa uma
condição intermédia e o valor de 75.2% aproxima-se de um spray contínuo.
Em termos de pressão de injecção foram estudadas 3 pressões: 2.3 bar, 3.3 bar e 5.0 bar.
Para estudar o efeito das propriedades físicas do líquido de arrefecimento recorreu-se a dois
líquidos diferentes, HFE7100 (C4F9OCH3) fabricado pela 3M e metanol (CH3OH). As principais
propriedades dos líquidos estão assinaladas na Tabela 4.1 sendo os valores apresentados baseados
nos fornecidos pela 3M para o HFE7100 [40] e pelo CRC Handbook of Chemistry and Physics [41]
para o metanol.
Tabela 4.1 – Propriedades termo-físicas dos líquidos de arrefecimento utilizados.
Líquido HFE 7100 Metanol ρ [kg m-3] 1488 788
µ x 1004 [kg m-1 s-1] 5.7 5.6
σ x 1003 [kg s-2] 13.6 22.3
α x 1008 [m2 s-1] 3.9 10.4
k x 1003 [W m-1 K-1] 68.8 203.3
cp [J kg-1 ºC-1] 1177 2481
T.b [ºC] 61 65
hfg [kJ kg-1] 126 1158
Foi ainda testada a influência da posição do modelo experimental (vertical versus horizontal) para
analisar a influência da presença de um filme de líquido que se poderá formar e acumular sobre a
superfície quando esta está na posição horizontal.
Desta forma, foram conduzidos testes com metanol para a mesma frequência, pressão, distância
entre atomizador e superfície, posição e líquido, variando o duty cycle. Para cada um dos duty cycle,
e mantendo as restantes variáveis constantes, foram realizados testes para a segunda frequência.
Repetiu-se o mesmo procedimento para as três pressões distintas, estudando sempre os 3 duty
cycle, para ambas as frequências. Foram efectuados testes preliminares para garantir que mantendo
o duty cycle e variando a frequência, a quantidade de líquido entregue no final era a mesma visto que

53
a relação entre a duração de impulso e o período são alteradas com a frequência que por sua vez
compensa com o número de injecções totais na duração do teste.
De seguida, alterando a posição do modelo experimental para vertical, repetiram-se os testes de
duty cycle para ambas as frequências com uma pressão de 2.3 bar. Não se repetiram testes para
outras pressões pois foi possível nos testes iniciais descartar a influência deste parâmetro.
Mudando de líquido para HFE7100 e utilizando 2.3 bar voltou-se a repetir o procedimento.
A distância entre atomizador e a superfície foi mantida constante em todos os testes uma vez que
nos testes de potência constante foi encontrado um valor óptimo para este parâmetro.
Todos os resultados apresentados resultam de um conjunto alargado de testes para as mesmas
condições, comprovando assim a reprodutibilidade dos resultados obtidos. Em todos os testes a
temperatura ambiente e humidade relativa da sala são registadas.

54
Capítulo 5 - Resultados experimentais
5.1. Sistemas de arrefecimento de uso corrente
Para testar as soluções comerciais de arrefecimento foram realizados testes a potência constante
e testes com um perfil de potência variável. Os resultados obtidos demonstram que o comportamento
dos termopares de superfície é sempre coincidente. De facto, analisando todos os testes de potência
constante e de perfil de potência, verifica-se que em média o desvio registado entre as temperaturas
dos termopares de superfície não ultrapassa 1ºC, no caso do sistema de arrefecimento a ar, e apenas
0.28ºC, no caso do sistema indirecto a água. Por esta razão, os resultados que aqui são
apresentados apenas consideram as temperaturas medidas por um dos termopares de superfície e,
uma vez que as condições mais restritivas ocorrem na fonte de calor, a análise incidirá sobre o
termopar que se encontra em contacto directo com esta. Todos os resultados apresentados a seguir
foram obtidos de um conjunto de testes para cada condição de funcionamento.
A Figura 5.1 compara as temperaturas medidas pelo termopar colocado na fonte de calor quando
cada um dos sistemas de arrefecimento convencionais é utilizado ao longo de 5 minutos para
arrefecer o modelo experimental quando este dissipa diferentes potências (15W, 30W, 45W e 60W).
Os resultados mostram que, para uma potência dissipada de 15 W, a utilização do sistema de
arrefecimento a ar dá origem a temperaturas, em média, superiores em 1.6ºC, chegando as
diferenças a atingir 2.4ºC (Figura 5.1a). O mesmo acontece para 30 W (Figura 5.1b), sendo que
agora as diferenças são, em média, de 2.2ºC, atingindo valores máximos de 3.1ºC. Novamente a
diferença torna-se definida logo nos instantes iniciais. Para 45 W (Figura 5.1c) as diferenças são mais
evidentes, com resultados para o uso do sistema a ar a apresentar uma temperatura em média 4.3ºC
acima do sistema de água, podendo existir diferenças de 5.6ºC. Por fim, no caso de 60 W (Figura
5.1d) as diferenças tendem a desaparecer no final do teste. Embora os testes com o sistema a ar
continuem a apresentar temperaturas superiores (cerca de 2ºC), no final do teste os resultados para
ambos os sistemas tendem a aproximar-se, existindo nesta fase apenas uma diferença média de
1.3ºC. No entanto, ao longo do teste de potência a 60 W verificam-se pontos de diferença máxima de
3.4ºC, verificando-se sempre uma temperatura superior aquando do uso do sistema de arrefecimento
a ar.
É também de se assinalar o facto de a temperatura estabilizar logo nos instantes iniciais quando é
utilizado o sistema de arrefecimento a água, enquanto que, quando é utilizado o sistema a ar, serem
necessários alguns segundos para estabilizar. Embora não seja muito evidente no caso de 15 W, o
mesmo se observa em todos os testes a potência constante. De facto, para 30 W, analisando as
temperaturas medidas a 10, 60 e 300 segundos, observa-se que nos testes com o sistema de ar
existem variações de 34.7ºC (10s) para 40.3ºC (60s) e 42.2ºC (300s), enquanto que no caso do
sistema a água as variações são de 35.2ºC para 38.4ºC (60s) e 40ºC (300s). O mesmo se observa
para as restantes potências. Para 45 W a temperatura varia de 40.2ºC (10s) para 47.4ºC (60s) e
terminando em 50.7ºC (300s) quando se utiliza o sistema a ar, contra 39.4ºC (10s), 43.6ºC (60s) e

55
46ºC (300s) quando se utiliza o sistema de arrefecimento indirecto com água. Mesmo para 60 W
verifica-se uma passagem de 41.2 (10s) para 50.5 (60s) e 53.9ºC (300s) com o sistema a ar e 42.6ºC
(10s) para 49.1ºC (60s) e 52.6ºC (300s) com o de água. Repare-se que, neste caso, e ao contrário do
que se verifica para as outras potências, os testes com o sistema a ar apresentam aos 10 segundos
uma temperatura mais baixa do que os testes com o uso do sistema a água mas no entanto o
sistema de arrefecimento a ar não é capaz de manter essa diferença, perdendo antes do final do
teste a vantagem alcançada.
0
5
10
15
20
25
30
35
40
0 20 40 60 80 100 120 140 160 180 200 220 240 260 280 300
Tempo [s]
T [ºC]
Cooler
Watercooling
(a)
0
5
10
15
20
25
30
35
40
45
0 20 40 60 80 100 120 140 160 180 200 220 240 260 280 300
Tempo [s]
T [ºC]
Cooler
Watercooling
(b)
05
10152025303540455055
0 20 40 60 80 100 120 140 160 180 200 220 240 260 280 300
Tempo [s]
T [ºC]
Cooler
Watercooling
(c)
05
10
1520
2530
3540
455055
0 20 40 60 80 100 120 140 160 180 200 220 240 260 280 300
Tempo [s]
T [ºC]
Cooler
Watercooling
(d)
Figura 5.1 – Comparação entre Watercooling e Cooler para: (a) 15W; (b) 30W; (c) 45W; (d) 60W.
Relativamente aos termopares de superfície observa-se o mesmo comportamento. Considerando
o termopar de superfície 1 verifica-se que para 15 W os testes com o sistema de arrefecimento a ar

56
apresentam em média uma temperatura 1.9ºC mais elevada do que os com o sistema a água,
registando-se pontos em que a temperatura dos testes com o sistema a ar é 2.7ºC mais elevada.
Para 30 W, o termopar de superfície 1 apresenta para os testes com o sistema a ar uma temperatura
em média 2.2ºC superior aos testes com o sistema a água e pontos em que a diferença é de 3.2ºC.
Nos 45 W encontra-se, em média, uma temperatura 4.6ºC superior para os testes com o sistema a ar,
podendo atingir pontos superiores a 5.7ºC relativamente aos testes com o sistema a água. Por fim,
para 60 W, tal como no termopar interior, verifica-se uma diminuição da diferença entre as
temperaturas sendo que no termopar de superfície a diferença registada é superior, verificando-se em
média para os testes com o sistema a ar uma temperatura 2.4ºC superior à dos testes com o sistema
a água. Em termos de pontos de diferença máxima podem existir diferenças de 4.1ºC. Também nos
termopares de superfície se verifica uma estabilização de temperatura mais rápida para os testes
com o uso do sistema a água e, a titulo de exemplo, veja-se o caso de 60 W onde novamente os
testes com o sistema a ar apresentam nos primeiros segundos uma temperatura mais reduzida mas
rapidamente perdem esta vantagem. Os testes com o sistema a ar apresentam uma temperatura de
34.2ºC aos 10 segundos passando para os 40.6ºC (60s) e terminando em 43.9ºC (300s). Pelo
contrário, os testes com o sistema a água começam com uma temperatura ligeiramente superior,
35.5ºC (10s), mas recuperam aos 60 segundos apresentando uma temperatura de 38.9ºC e finalizam
em 41.8ºC (300s).
Verifica-se deste modo que, nos testes efectuados com o sistema de arrefecimento indirecto a
água, quer os termopares de superfície, quer o termopar colocado na fonte de calor, apresentam
valores inferiores, embora com diferenças pouco significativas, aos que apresentam quando é
utilizado o sistema de arrefecimento a ar. Adicionalmente, as variações de temperatura após os 10
segundos iniciais são menores no primeiro caso.
A análise apresentada nos parágrafos anteriores considerou o comportamento dos dois sistemas
de arrefecimento quando a potência térmica dissipada é constante. Na análise que se segue
compara-se o comportamento de ambos os sistemas numa situação real, aqui simulada com o perfil
de potência térmica descrito na Figura 4.7 do capítulo 4.
A Figura 5.2 compara as temperaturas medidas em ambos os casos pelo termopar colocado na
fonte de calor (Figura 5.2a) e pelo termopar de superfície 1 (Figura 5.2b). Mais uma vez, os
resultados mostram que o termopar da fonte de calor apresenta, ao longo de todo o teste, uma
temperatura superior com o sistema de arrefecimento a ar, com uma diferença média de 1.9ºC
(existem pontos com diferenças de aproximadamente 3ºC). Ao nível do termopar de superfície as
diferenças são maiores. Neste caso, o teste com o sistema de arrefecimento a ar apresenta, em
média, valores 2.5ºC acima dos medidos no teste com o sistema a água, havendo diferenças de 4ºC.
Ao analisar o comportamento de cada sistema ao longo de perfil verifica-se que, à parte da diferença
de temperatura, o comportamento é semelhante. A titulo de exemplo examine-se alguns dos picos de
potência. Por exemplo, após o primeiro pico de potência e durante a diminuição de potência dos 44
aos 50 segundos, os testes para ambos os sistemas apresentam um decaimento semelhante. Para o
termopar da fonte de calor, os testes com o sistema a ar apresentam um declive de 1.28ºC/s contra
1.41ºC/s para os testes com o sistema a água. No caso do termopar de superfície, e para o mesmo

57
troço de perfil, novamente os testes para ambos os sistemas apresentam um declive semelhante
(0.68ºC/s no teste do sistema a ar contra 0.70ºC/s no caso do sistema com água). De facto
analisando outros períodos, por exemplo o período entre 75 e 94 segundos, o comportamento dos
sistemas mantém-se idêntico, sendo que o termopar da fonte de calor apresenta um declive de
0.33ºC/s para o teste com o sistema a ar contra 0.34ºC/s para o teste com o sistema de água. O
mesmo acontece com o termopar de superfície 1, com valores de 0.17ºC/s para o teste com ar e
0.14ºC/s para o teste com água.
05101520253035404550
0 20 40 60 80 100 120
Tempo [s]
T [ºC]
Cooler
Watercooling
(a)
051015202530354045
0 20 40 60 80 100 120
Tempo [s]
T [ºC]
Cooler
Watercooling
(b)
Figura 5.2 – Comparação de sistemas de arrefecimento após teste com perfil de potência
analisando 2 termopares: (a) Fonte de calor; (b) Superfície 1.
Com base nos resultados descritos até aqui é possível afirmar que, embora as diferenças sejam
reduzidas, existe uma melhoria quando se utiliza o sistema a água face ao sistema a ar, sendo que o
sistema a água consegue ainda, em todos os casos, apresentar uma menor variação de temperatura
após os instantes iniciais. Muito embora não seja possível afirmar um domínio claro de uma das
tecnologias, o sistema a água permitiu que o modelo funcionasse, em todos os testes, a temperaturas
inferiores, sugerindo uma maior potencialidade desta tecnologia. Ao mesmo tempo, os sistemas a ar
têm actualmente dificuldade em evoluir devido a limitações ao tamanho e no tipo de materiais
utilizados. No lado oposto, o sistema de arrefecimento indirecto a água testado (Watercooling) utiliza
uma montagem básica sem qualquer melhoramento, uso de refrigerantes ou ventoinhas de radiador
mais potentes.
Por estas razões, as soluções de arrefecimento indirecto com líquido, como já referido por Chu em
[7], podem constituir-se como uma melhor solução face aos sistemas de convecção a ar
precisamente por não estarem ainda limitadas em termos evolutivos. De facto, o bloco do sistema de
arrefecimento é menor que o de ar, existindo já tentativas neste campo para aumentar o desempenho
térmico destes sistemas. Em termos empíricos, visto não se terem realizado testes de ruído aos

58
sistemas, o sistema de água aparenta ser mais silencioso (a ventoinha do radiador e a bomba de
água são silenciosas).
Uma vantagem evidente do arrefecimento convectivo a ar é que faz uso de apenas um
componente que é facilmente incorporado em qualquer sistema. No entanto, embora actualmente os
sistemas de arrefecimento a água convencionais sejam constituídos por diversos componentes,
existem já equipamentos em comercialização desenhados para serem incorporados em
equipamentos portáteis. Como exemplo da variedade de soluções e equipamentos actualmente
existentes, refira-se que o fabricante NEC apresentou em 2003 o primeiro sistema de arrefecimento a
água projectado para uso em computadores portáteis [42].
Ainda neste contexto, Zhang et al. [43] compararam um sistema de arrefecimento a ar e um
sistema de arrefecimento indirecto com água. O sistema de arrefecimento a ar utilizado pelos autores
contém uma câmara de vapor arrefecida com um dissipador e ventilador e o sistema de arrefecimento
a água comporta componentes semelhantes aos utilizados no presente trabalho. Os sistemas foram
testados com vista a se encontrar um sistema capaz de suportar 140 W de dissipação térmica. Os
autores concluíram que o sistema a ar apresentava limitações, enquanto o sistema a água podia ser
aplicado a sistemas com dissipações de 140 a 170 W (100 a 118 W/cm2), apresentando-se como
solução fiável no arrefecimento da próxima geração de sistemas electrónicos de alto desempenho.
5.2. Intermittent Spray Cooling (ISC)
O principal objectivo deste trabalho consiste numa caracterização do desempenho de um sistema
de ISC que permita avaliar a aplicação da tecnologia ao arrefecimento de processadores. Muito
embora alguns investigadores tenham publicado estudos experimentais em sprays intermitentes
incidentes em superfícies aquecidas, todos eles abordam os fundamentos físicos dos mecanismos de
transmissão de calor. Por exemplo, Panão e Moreira [18, 19] estudaram a influência das condições
de injecção de líquido, e.g. frequência e duração da injecção, pressão de injecção do líquido e
distância do injector à superfície. Em todos os casos são utilizadas instalações experimentais
simplificadas, nas quais a dissipação térmica é constante e a metodologia experimental consiste em
fazer o spray incidir na superfície quando esta se encontra a uma temperatura estabilizada. Apenas o
trabalho de Cader et al. [13] considera uma condição de fronteira térmica variável no tempo mas,
mesmo assim, não reproduz inteiramente características de funcionamento reais.
Uma vez que o modelo experimental construído no presente trabalho reproduz condições de
funcionamento de um processador, pretende-se realizar testes que sirvam de guia no projecto de
sistemas práticos. Para isso as experiências são conduzidas iniciando-se o sistema à temperatura
ambiente e procurando as condições de funcionamento do sistema de arrefecimento capazes de
manter a temperatura abaixo do valor máximo permitido, quando o modelo experimental está sujeito a
um perfil de potência térmica semelhante ao de um processador real.
Os parâmetros a analisar incluem a frequência e a duração do sinal de abertura e fecho do
injector, a pressão do líquido a montante do injector, a direcção do spray relativamente à superfície
de impacto (horizontal versus vertical), a distância do atomizador à superfície (dnoz) e as propriedades

59
do líquido de arrefecimento. O termo duty cycle é frequentemente utilizado ao longo da análise e
corresponde ao definido na secção de metodologia experimental (capítulo 4).
Para definir a gama de valores de alguns parâmetros foram realizados testes de potência
constante. Devido a restrições do número de páginas deste documento, não será feita uma descrição
exaustiva destes testes, sendo apresentados alguns resultados considerados como representativos
dos testes realizados. Todos os testes apresentados foram realizados para 60 W.
Assim, foram realizados testes para uma dissipação de potência constante de 60 W, com o
modelo experimental na posição horizontal, utilizando-se o mesmo sinal de injecção e variando a
distância dnoz do atomizador à superfície desde poucos milímetros (dnoz ≈ 5 mm) até valores
relativamente elevados (dnoz > 80 mm). Os resultados confirmam a importância de dnoz na transmissão
de calor e mostram que, para distâncias acima de 80 mm a temperatura no modelo experimental
aumenta continuamente até que o sistema de arrefecimento deixa de ser capaz de manter a
temperatura dentro dos valores permitidos. Este comportamento evidencia a existência de uma valor
máximo para dnoz. Esta conclusão é confirmada na Figura 5.3, onde se mostra o efeito de dnoz na
temperatura medida pelo termopar colocado na fonte de calor quando o sistema dissipa 60 W na
posição horizontal e o líquido é injectado a 3.0 bar com um sinal de injecção a 0.71Hz e 72.9% duty
cycle. As curvas de temperatura representadas na figura mostram ainda que, embora numa fase
inicial ambas apresentem um comportamento semelhante, a tendência das temperaturas medidas a
dnoz = 78 mm é de incremento, denunciado a incapacidade do sistema de arrefecimento para manter
o equilíbrio térmico, enquanto à distância dnoz = 27 mm se consegue atingir o equilíbrio térmico antes
de decorrido 1 minuto de teste. Note-se que foi utilizado um duty cycle elevado, pelo que o
funcionamento do sistema de arrefecimento se aproxima do de um spray contínuo o que realça a
influência que elevadas distâncias entre atomizador e superfície podem ter.
5
15
25
35
45
55
65
75
85
010 20 30 40 50 60 70 80 90
Tempo [s]
T [ºC]
dnoz = 27 mm
dnoz = 78 mm
5
15
25
35
45
55
65
75
85
010 20 30 40 50 60 70 80 90
Tempo [s]
T [ºC]
dnoz = 27 mm
dnoz = 78 mm
Figura 5.3 – Temperatura no termopar da fonte de calor para testes realizados com HFE7100,
3.0 bar, posição horizontal, com sinal de injecção de 0.71Hz e 72.9% duty cycle.
Verificou-se ainda que também existe um valor mínimo de dnoz capaz de manter a temperatura do
modelo abaixo do limite de segurança. De facto, observa-se um comportamento semelhante ao
observado para elevados dnoz quando o atomizador está muito próximo da superfície (dnoz < 10 mm).
Existe, assim, um intervalo óptimo para dnoz, fora do qual o sistema de arrefecimento não é capaz
de arrefecer eficazmente o modelo experimental. A análise apresentada em Mudawar e Estes [22]
permite explicar este resultado: sendo a superfície utilizada como IHS quadrada, o desempenho do

60
sistema de arrefecimento depende se o spray circunscreve, ou não, a área aquecida. Desta forma se
a distância entre a superfície e o atomizador ultrapassar o ponto em que o spray circunscreve a
superfície aquecida, a capacidade de arrefecimento do sistema é diminuída devido ao facto de uma
fracção do líquido do spray estar a ser perdida para fora da superfície aquecida. Por outro lado,
quando dnoz é muito reduzido, a área do spray não é suficiente para cobrir toda a superfície aquecida,
sendo que apenas uma pequena porção da superfície é arrefecida por impacto directo do spray (no
presente trabalho esta porção corresponde ao centro do IHS). Desta forma, ao não arrefecer toda a
superfície, o sistema não é capaz de atingir o equilíbrio térmico.
Além disso, Bash et al. [21] também referem que o fluxo de calor crítico diminui linearmente
quando se aumenta a distância do atomizador à superfície aquecida. Os resultados obtidos no
presente trabalho permitem concluir que a distância do atomizador à superfície deve ser regulada
entre 20 e 30 mm, sendo esta a distância para a qual o spray centrado no IHS circunscreve toda a
área aquecida.
Apesar de Shedd [20] ter referido que as conclusões de Mudawar e Estes [22] poderiam significar
uma limitação à aplicação desta tecnologia, considera-se que a distância encontrada no presente
trabalho é compatível com a aplicação a sistemas reais. De facto, o Cooler utilizado anteriormente
pode ter cerca de 92 mm de diâmetro e 61.3 mm de altura. Desta forma, apesar dos 20 a 30 mm
apenas se referirem à distância entre a superfície e o atomizador, é possível afirmar que existe
espaço num computador de desktop normal (Figura 5.4) para a colocação de um sistema deste tipo
(incluindo o equipamento de injecção). A titulo de exemplo veja-se que o sistema de arrefecimento
indirecto a água comporta diversos elementos, incluindo um radiador com 152.8 mm x 120.3 mm x
70.3 mm, facto que não limita a aplicação destes sistemas.
ALTURA LIVRE = ±320 mm
LARGURA LIVRE = ±300 mm
PROFUNDIDADE LIVRE = ±120 mm
Figura 5.4 – Espaço livre numa torre de desktop (volume livre ≈ 11 520 cm3).
A forma do sinal electrónico de controlo de abertura do injector, nomeadamente a frequência e
duty cycle, é outro parâmetro importante que foi considerado nos testes preliminares efectuados com
uma dissipação de potência constante. Após a realização de diversos testes verificou-se que o
equilíbrio térmico do sistema não era atingido para todos os casos, sendo que alguns dos sinais
testados não eram capazes de manter o sistema abaixo dos valores máximos de temperatura
permitida. Em particular, verificou-se que a combinação de frequências elevadas com duty cycle

61
reduzidos, situação por vezes referida como sendo um caso ideal, não se demonstrava eficaz na
manutenção da temperatura. No entanto, esta situação pode ocorrer devido ao facto de muitos dos
casos relatados na literatura se basearem em sprays densos e não esparsos, como o utilizado no
presente trabalho.
Na Figura 5.5 mostra-se o efeito do sinal de injecção na evolução da temperatura medida pelo
termopar que está em contacto com a fonte de calor, em testes realizados com o modelo
experimental na posição horizontal, com uma pressão de injecção de 3.0 bar e dnoz = 27 mm. Verifica-
se a importância do sinal de injecção já que não é possível manter a temperatura constante em todos
os casos. De facto, sinais com baixo duty cycle e elevada frequência, como acontece para o caso de
3.13Hz com 25.0% de duty cycle, podem já não ser capazes de garantir uma temperatura constante
dentro dos limites máximos permitidos, pelo que o teste tem de ser interrompido por questões de
segurança.
0
20
40
60
80
100
120
140
0 10 20 30 40 50
Tempo [s]
T [ºC]
1.14 Hz; 50.0% Duty Cycle
0.71 Hz; 72.9% Duty Cycle
3.13 Hz; 25.0% Duty Cycle
2.78 Hz; 55.6% Duty Cycle
Figura 5.5 – Evolução da temperatura no termopar da fonte de calor para testes com HFE7100,
dnoz de 27 mm, 3.0 bar, posição horizontal e diversos sinais de injecção.
Os resultados na Figura 5.5 mostram também que, aumentando-se o duty cycle, é possível atingir
temperaturas estáveis dentro de uma gama de valores abaixo do máximo permitido pelo sistema. De
facto, verifica-se que desde que o duty cycle esteja acima ou na gama dos 50%, embora a frequência
varie desde 0.71Hz até 2.78Hz (um incremento de aproximadamente 3.9 vezes), a temperatura
estabiliza num valor relativamente próximo para todas as frequências.
Os testes descritos nos parágrafos anteriores, embora tenham sido realizados impondo-se ao
modelo experimental uma potência térmica constante, permitiram definir o intervalo de variação dos
parâmetros de funcionamento a considerar nos ensaios em condições reais de funcionamento.
Nestes ensaios a distância do atomizador à superfície foi mantida constante em dnoz = 20 mm. Cada
um dos parâmetros foi analisado de forma independente. Em todos os ensaios o spray é accionado
no instante inicial do perfil de potência e a evolução das temperaturas medida ao longo do tempo.
Tal como referido na metodologia experimental foram escolhidas 3 pressões de injecção. Estas
pressões foram escolhidas após garantia de que o spray apresenta uma correcta atomização, mesmo
à pressão mínima.

62
A Figura 5.6 apresenta as distribuições de temperatura medidas nos ensaios realizados com um
sinal de injecção a 2.6Hz e duty cycle de 23.6%, com o modelo experimental na posição horizontal,
utilizando-se metanol como líquido de arrefecimento a uma pressão de injecção de 5.0 bar. Os picos
de temperatura apresentados nas figuras que se seguem correspondem aos picos de potência do
perfil que está a ser testado. Para todos os ensaios, os valores são muito semelhantes em todos os
termopares de superfície (a diferença média é de cerca de 1.3ºC) sinónimo de que a distribuição
espacial do fluxo de calor na superfície é uniforme. Por isso, excepto nos ensaios em que esses
desvios não são negligenciáveis, a análise do comportamento térmico da superfície considerará
apenas a temperatura medida por um termopar.
A Figura 5.6 mostra ainda que, tal como nos sistemas de arrefecimento de uso corrente, o
termopar da fonte de calor está sempre a uma temperatura superior relativamente aos termopares de
superfície atingindo, em alguns instantes, 11ºC de diferença. Embora esperado, este facto é aqui
destacado para sublinhar o papel importante da resistência térmica criada pelo IHS na transmissão
de calor. Contudo, uma vez que a região próxima da fonte de calor é aquela que condiciona o
funcionamento seguro do sistema, a análise que se segue incidirá, sobretudo, na evolução da
temperatura medida pelo termopar colocado junto à fonte de calor.
0
10
20
30
40
50
60
70
80
0 20 40 60 80 100 120
Tempo [s]
T [ºC]
Termopar Superfície 1
Termopar Interior
Termopar Superfície 2
Figura 5.6 – Evolução da temperatura para testes de spray com sinal de injecção de 2.6Hz,
23.6% duty cycle, 5.0 bar, posição horizontal recorrendo a metanol.
Em todos os casos o sistema opera de forma automática, variando a potência ao longo da duração
do ensaio e, sempre que o sistema de arrefecimento não é capaz de suster o aumento excessivo de
temperatura, a rotina de segurança interrompe automaticamente o ensaio.
Nos parágrafos que se seguem é estudada a influência do duty cycle no desempenho do sistema
de arrefecimento. A Figura 5.7 apresenta a evolução da temperatura do termopar da fonte de calor,
quando o duty cycle varia de 23.6% a 75.2%, medida em ensaios com metanol injectado a diferentes
pressões e diferentes frequências. Cada gráfico da figura mostra o efeito das variações do duty cycle
quando todos os outros parâmetros são mantidos constantes. Recorde-se que o atomizador é
mantido na horizontal à distância dnoz = 20 mm da superfície.

63
0
10
20
3040
50
60
70
0 20 40 60 80 100 120
Tempo [s]
T [ºC]
Duty 23.6%
Duty 57.7%
Duty 75.2%(a)
01020304050607080
0 20 40 60 80 100 120
Tempo [s]
T [ºC]
Duty 23.6%
Duty 57.7%
Duty 75.2%(b)
01020304050607080
0 20 40 60 80 100 120
Tempo [s]
T [ºC]
Duty 23.6%
Duty 57.7%
Duty 75.2%(c)
01020304050607080
0 20 40 60 80 100 120
Tempo [s]
T [ºC]
Duty 23.6%
Duty 57.7%
Duty 75.2%(d)
01020304050607080
0 20 40 60 80 100 120
Tempo [s]
T [ºC]
Duty 23.6%
Duty 57.7%
Duty 75.2%(e)

64
01020304050607080
0 20 40 60 80 100 120
Tempo [s]
T [ºC]
Duty 23.6%
Duty 57.7%
Duty 75.2%(f)
Figura 5.7 – Evolução da temperatura no termopar da fonte de calor em testes de spray com
metanol (posição horizontal) para: (a) 2.3 bar, 0.8Hz; (b) 2.3 bar, 2.6Hz; (c) 3.3 bar,
0.8Hz; (d) 3.3 bar, 2.6Hz; (e) 5.0 bar, 0.8Hz; (f) 5.0 bar, 2.6Hz.
A análise dos resultados, tal como já se fazia notar nos testes de potência constante, confirma que
perante uma situação transitória, existe um valor de duty cycle óptimo, entre 50% e 60%, acima do
qual o aumento deste parâmetro não melhora significativamente a capacidade de arrefecimento do
sistema. Por exemplo, a Figura 5.7a (0.8Hz e 2.3 bar) mostra que os declives das curvas obtidas com
duty cycle de 57.7% e 75.2% são semelhantes. Repare-se, por exemplo, que as temperaturas
medidas no período de 50 para 60 segundos, onde as variações de potência são significativas, são
muito semelhantes nos dois casos (e.g. aos 60 segundos existe apenas uma diferença de 3.7ºC entre
as duas curvas). Obtêm-se conclusões semelhantes quando se analisa o período de declive negativo
da curva de potência, entre 60 e 72 segundos. Note-se que, sendo o duty cycle de 75.2% um valor
elevado, o comportamento do sistema nesta condição aproximar-se-á do que se obtém com um spray
contínuo.
Contudo, os resultados mostram diferenças significativas nos valores das temperaturas medidas
quando o duty cycle aumenta de 23.6% para 57.7%, muito embora com evoluções qualitativamente
semelhantes, tanto nos períodos de gradiente positivo, como nos períodos de gradiente negativo da
potência térmica. Considerando novamente a Figura 5.7a, verifica-se que para o mesmo troço dos 50
a 60 segundos, existem diferenças evidentes entre os ensaios com duty cycle de 23.6% e 57.7% e
aos 60 segundos a curva com duty cycle de 23.6% apresenta-se 11.5ºC superior à de 57.7%.
A Figura 5.7 mostra ainda que a conclusão é independente da frequência e da pressão de
injecção: existe uma gama de valores do duty cycle que optimiza o desempenho do sistema de
arrefecimento.
Note-se ainda que, apesar de numa gama de temperatura mais baixa a temperatura da superfície
ter um comportamento semelhante ao da temperatura da fonte de calor, são de salientar as
diferenças significativas que ocorrem quando a potência térmica varia rapidamente. Observe-se, por
exemplo, que, enquanto a temperatura da fonte de calor responde às variações muito rápidas de
potência que ocorrem a partir dos 94 segundos, a temperatura da superfície praticamente não varia.
A evolução da temperatura na superfície pode ser analisada com base nas temperaturas medidas
pelo termopar de superfície 2, já que a distribuição espacial do fluxo de calor é, neste caso,
homogénea. Na Figura 5.8 estão representados os resultados obtidos para as mesmas condições de
funcionamento da Figura 5.7 mas considerando agora o termopar de superfície 2.

65
0
10
20
30
40
50
60
0 20 40 60 80 100 120
Tempo [s]
T [ºC]
Duty 23.6%
Duty 57.7%
Duty 75.2%(a)
0
10
20
30
40
50
60
0 20 40 60 80 100 120
Tempo [s]
T [ºC]
Duty 23.6%
Duty 57.7%
Duty 75.2%
(b)
0
10
20
30
40
50
60
70
0 20 40 60 80 100 120
Tempo [s]
T [ºC]
Duty 23.6%
Duty 57.7%
Duty 75.2%(c)
0
10
20
30
40
50
60
0 20 40 60 80 100 120
Tempo [s]
T [ºC]
Duty 23.6%
Duty 57.7%
Duty 75.2%
(d)
0
10
20
30
40
50
60
70
0 20 40 60 80 100 120
Tempo [s]
T [ºC]
Duty 23.6%
Duty 57.7%
Duty 75.2%(e)

66
0
10
20
30
40
50
60
70
0 20 40 60 80 100 120
Tempo [s]
T [ºC]
Duty 23.6%
Duty 57.7%
Duty 75.2%(f)
Figura 5.8 – Evolução da temperatura no termopar de Superfície 2 em testes de spray, posição
horizontal recorrendo a metanol para: (a) 2.3 bar, 0.8Hz; (b) 2.3 bar, 2.6Hz; (c) 3.3
bar, 0.8Hz; (d) 3.3 bar, 2.6Hz; (e) 5.0 bar, 0.8Hz; (f) 5.0 bar, 2.6Hz.
Observe-se, por exemplo, os resultados obtidos nos ensaios a 0.8Hz a 2.3 bar (Figura 5.8a).
Novamente se observa que os declives das curvas são semelhantes para o duty cycle de 57.7% e
75.2%, tanto no período de 50 a 60 segundos (0.89ºC/s versus 0.96ºC/s), em que a potência térmica
dissipada aumenta, como no período em que a potência diminui, de 60 a 72 segundos. Também
neste caso, aos 60 segundos, apenas existe uma diferença de 3.7ºC entre as duas curvas.
Por outro lado, a capacidade de arrefecimento do sistema é consideravelmente deteriorada
quando o duty cycle diminui abaixo do valor óptimo. Mas, tal como acontece à temperatura da fonte
de calor, embora a temperatura da superfície varie muito pouco quando o duty cycle aumenta de
57.7% para 75.2%, as diferenças são significativas quando o duty cycle aumenta de 23.6% para
57.7% (e.g. aos 60 segundos existe uma diferença de 11.3ºC entre as curvas de 23.6% e 57.7% de
duty cycle). Os resultados da Figura 5.8 corroboram a conclusão de que a frequência e a pressão de
injecção não alteram este comportamento.
Os resultados apresentados na Figura 5.7 e Figura 5.8 e a discussão que é apresentada nos
parágrafos anteriores, evidenciam que o duty cycle é o parâmetro mais importante no funcionamento
do sistema de arrefecimento, enquanto a frequência de abertura e fecho do injector e a pressão de
injecção do líquido têm efeitos negligenciáveis.
O papel da frequência pode ser analisado na Figura 5.9 e o da pressão na Figura 5.10. A primeira
mostra os resultados das medidas efectuadas pelo termopar colocado na fonte de calor a 0.8Hz e
2.6Hz, para cada um dos duty cycle; a segunda mostra o efeito de se variar a pressão de injecção
entre os três valores definidos. Em ambos os casos é utilizado metanol e o modelo experimental é
mantido na posição horizontal a dnoz = 20 mm da superfície. Recorde-se, no entanto, que o duty cycle
é definido como a razão entre a duração do pulso e o período do pulso, considerando um sinal
baseado em pulsos rectangulares [32]. Por isso, nos testes em que se varia a frequência, garante-se
que se altera o tempo de injecção e o tempo entre injecções, não se influenciando no entanto o fluxo
mássico de líquido injectado na duração total do ensaio. Foram realizados ensaios para garantir que
variando apenas a frequência existia, no final de um período de tempo definido, o mesmo fluxo
mássico de líquido.
Os resultados da Figura 5.9 e da Figura 5.10 mostram claramente que o desempenho do sistema
de Spray Cooling Intermitente é independente da frequência e pressão utilizadas. É importante

67
sublinhar que este resultado foi confirmado em ensaios exaustivos efectuados a diversas condições
de funcionamento.
Apenas a titulo de exemplo, verifica-se que na Figura 5.9 as diferenças entre as curvas são
negligenciáveis sendo que o desvio médio de temperatura entre as duas curvas é de apenas 1.7ºC
para o caso do duty cycle de 23.6% (Figura 5.9a), sendo ainda inferior para o 57.7% (Figura 5.9b:
desvio médio de 0.4ºC) ou 75.2% (Figura 5.9c: desvio médio de 0.8ºC). O mesmo comportamento é
verificado, em termos de influência da frequência, para os termopares de superfície.
Para o caso da Figura 5.10, e comparando a temperatura em alguns pontos representativos de
situações exigentes, verifica-se que a temperatura para as 3 pressões é equivalente. Por exemplo,
para o termopar da fonte de calor, verifica-se que aos 44 segundos a curva de 2.3 bar apresenta uma
temperatura de 65.4ºC, a de 3.3 bar apresenta 66.4ºC e a de 5.0 bar apresenta 65.5ºC. Verifica-se
que neste ponto a diferença máxima entre as curvas não ultrapassa 1ºC.
01020304050607080
0 20 40 60 80 100 120
Tempo [s]
T [ºC]
Freq. 0.8 Hz
Freq. 2.6 Hz
(a)
0
10
20
30
40
50
60
0 20 40 60 80 100 120
Tempo [s]
T [ºC]
Freq. 0.8 Hz
Freq. 2.6 Hz
(b)
0
10
20
30
40
50
60
0 20 40 60 80 100 120
Tempo [s]
T [ºC]
Freq. 0.8 Hz
Freq. 2.6 Hz
(c)
Figura 5.9 – Efeito da frequência do sinal de injecção na temperatura do termopar da fonte de
calor, em testes de spray (posição horizontal) com metanol, 2.3 bar, para
diferentes duty cycle: (a) 23.6%; (b) 57.7%; (c) 75.2%.

68
01020304050607080
0 20 40 60 80 100 120
Tempo [s]
T [ºC]
2.3 bar
3.3 bar
5.0 bar
(a)
0
10
20
30
40
50
60
70
0 20 40 60 80 100 120
Tempo [s]
T [ºC]
2.3 bar
3.3 bar
5.0 bar
(b)
Figura 5.10 – Comparação do efeito da pressão em testes de spray na posição horizontal, com
um sinal de injecção de 2.6Hz com 23.6% de duty cycle, recorrendo a metanol
para 2 dos termopares do sistema: (a) Fonte de Calor; (b) Superfície 2.
É então de salientar que, uma vez que a pressão de injecção não afecta o desempenho do
sistema, recomenda-se a utilização da pressão mínima que garanta uma correcta atomização de
forma a manter o hardware simples e seguro. Por exemplo, nos testes em transitório efectuados por
Cader et al. [13] os autores utilizam uma pressão de aproximadamente 1.01 bar (1 atm).
De facto, é possível afirmar que, com o uso de pressões reduzidas, não existem limitações à
aplicabilidade desta tecnologia a sistemas reais uma vez que apenas é necessário recorrer a um
depósito resistente a baixas pressões e a um sistema de compressão reduzido. Pela análise da
Figura 5.4 e recordando que existe um volume livre de aproximadamente 11 520 cm3 pode-se afirmar
que existe espaço suficiente para incorporar um sistema de injecção e um pequeno compressor com
um reservatório para o líquido.
A principal conclusão agora encontrada está de acordo com o trabalho de Panão e Moreira [18,
19] visto que estes autores também referem que o principal parâmetro a considerar no sinal de
controlo é o duty cycle. No entanto, ao contrário do apresentado por Panão e Moreira [18], o uso de
duty cycle reduzidos com frequências elevadas não se demonstrou eficiente quer para os estudos de
perfil de potência, quer para os de potência constante.
Neste trabalho também se verificou que existe uma distância óptima entre o atomizador e a
superfície, enquanto em [18] os autores apenas sugerem o uso de distâncias curtas. As diferenças
encontradas entre o presente trabalho e o de Panão e Moreira [18, 19] poderão ser explicadas pelo
facto de o sistema experimental utilizado na presente tese ser diferente, nomeadamente nos testes
de perfil de potência que correspondem a situações transitórias e não de fluxo de potência constante
como no caso dos autores referidos. Adicionalmente, no caso de [18] os autores optaram por partir de
uma situação com o sistema numa temperatura máxima, analisando o decaimento desta ao longo de
injecções consecutivas. Existem ainda diferenças ao nível da fonte de calor que no caso de [18, 19]

69
se baseia numa resistência eléctrica. Por fim, o spray utilizado por Panão e Moreira [18, 19] difere do
apresentado no presente trabalho na medida em que é um spray denso ao contrário do utilizado na
presente tese que é esparso.
Também no trabalho apresentado por Shedd [20] é focada a importância que o controlo de fluxo
tem na transferência de calor. Com base nos resultados aqui obtidos, o fluxo pode ser controlado
recorrendo a uma correcta escolha de duty cycle (visto o efeito negligenciável da frequência). Os
dados encontrados na presente tese estão ainda de acordo com Bash et al. [21] que, utilizando fluxos
de calor constante da mesma ordem dos utilizados em alguns dos picos de potência deste estudo,
afirmam a dependência do fluxo crítico de calor com o fluxo de líquido.
Nesta fase é então possível afirmar a existência de um valor óptimo de duty cycle, entre 50% e
60% (no presente trabalho) a partir do qual qualquer aumento não comporta melhorias significativas
na capacidade de arrefecimento do sistema. A recomendação para casos reais é a do uso de um
sinal de controlo com apenas um duty cycle central visto que, apesar da possibilidade de formação de
filme de líquido, demonstra-se eficaz para o controlo de temperatura. Neste sentido, o uso de um duty
cycle na gama óptima é uma opção mais fiável do que a variação do duty cycle visto que a rápida
alteração do funcionamento do processador conduz facilmente a picos de potência que poderão
necessitar de uma resposta que um sistema de variação poderá não fornecer. Adicionalmente, o uso
de duty cycle reduzidos pode conduzir a temperaturas elevadas e perigosas em termos de segurança
do processador. Desta forma a solução deverá ser baseada num sinal constante de controlo da
injecção ou num sistema como o utilizado por alguns sistemas convencionais a ar que se baseia em
dois modos de funcionamento, um normal e um de alto desempenho. Neste caso poderia ser aplicado
um duty cycle intermédio no funcionamento normal, mudando para um duty cycle elevado em
situações mais exigentes (por questões de segurança). É necessário realçar que esta situação é
diferente da variação de duty cycle reduzidos para os intermédios, situação que, apesar de se puder
apresentar mais eficiente na mudança de fase, está também mais vulnerável perante mudanças
exigentes do sistema, podendo conduzir a situações em que a resposta temporal do sistema de
arrefecimento não é suficiente para evitar danos no processador. O uso de duty cycle reduzidos deve
estar restrito a condições menos exigentes do que as presentes num processador real deste tipo.
Em termos da geração do sinal não existe qualquer entrave à aplicação desta tecnologia podendo-
se recorrer a um circuito gerador para o sinal de controlo, ou utilizar os sinais do próprio processador
fazendo divisão de frequência ou como trigger externo de timers.
A existência de uma gama de duty cycle óptimo, acima da qual os melhoramentos são
negligenciáveis, revela ainda uma das vantagens do uso de sistemas intermitentes sobre sistemas
contínuos, visto indicar que é possível obter uma capacidade de arrefecimento semelhante com uma
poupança considerável de líquido. Também Panão e Moreira [19] haviam referido que este tipo de
sistema poderia trazer poupanças estimadas de 10% a 90% de líquido.
O facto de a capacidade de arrefecimento do sistema não demonstrar melhorias significativas
após um certo valor de duty cycle pode ser analisada do ponto de vista físico tendo em conta a
explicação apresentada por Panão e Moreira [19] relativamente à alteração do processo de remoção
de calor que, na presença de um filme de líquido (provocada a partir de um certo duty cycle) acaba

70
por ser menos eficiente uma vez que se diminui a remoção de calor por mudança de fase. Deste
modo, para entender a influência que a formação de filme de líquido poderá representar neste
sistema, a posição do modelo experimental foi alterada de horizontal para vertical. Com esta
configuração o modelo passa a ter a superfície aquecida numa posição vertical, sendo a posição do
spray também alterada para garantir que continua a incidir à mesma distância e posição consideradas
nos ensaios realizados na horizontal (garantindo assim que se cobre toda a área aquecida). A
variação corresponde assim a um movimento de rotação de 90º de todo o sistema o que, fazendo uso
da gravidade, permite que qualquer filme de líquido anteriormente formado na superfície deixe de
existir.
Considerando uma pressão de injecção de 2.3 bar e uma distância absoluta entre o spray e a
superfície de 20 mm, foram realizados testes para as frequências de 0.8Hz e 2.6Hz, variando em
cada uma o duty cycle pelos valores seleccionados (23.6%, 57.7% e 75.2%), sendo utilizado metanol.
A Figura 5.11 mostra as temperaturas medidas pelo termopar da fonte de calor. No caso do sinal
de injecção a 0.8Hz (Figura 5.11a) verifica-se que, tal como nos testes efectuados na horizontal,
existe um melhoramento considerável ao variar o duty cycle de 23.6% para 57.7%. Analisando o pico
de potência compreendido entre 50 e 60 segundos verifica-se que os declives de ambas as curvas
são semelhantes mas a temperatura não é. De facto, relativamente aos testes na horizontal, a
diferença entre declives é superior (neste caso observa-se 1.18ºC/s para o teste com duty cycle de
23.6% contra 1.35ºC/s para 57.7%) mas continua a não ser significativa. No entanto a análise da
temperatura aos 60 segundos permite verificar que a curva com 23.6% é 7ºC superior à de 57.7%.
01020304050607080
0 20 40 60 80 100 120
Tempo [s]
T [ºC]
Duty 23.6%
Duty 57.7%
Duty 75.2%
(a)
01020304050607080
0 20 40 60 80 100 120
Tempo [s]
T [ºC]
Duty 23.6%
Duty 57.7%
Duty 75.2%(b)
Figura 5.11 – Efeitos do duty cycle na evolução da temperatura do termopar da fonte de calor
para testes com metanol, posição vertical, 2.3 bar e dnoz de 20 mm para um sinal
de injecção com: (a) 0.8Hz; (b) 2.6Hz.

71
O mesmo acontece nas zonas de diminuição de potência. Por exemplo, aos 72 segundos as
curvas apresentam entre si uma diferença de 8.8ºC.
Analisando estes resultados, e comparando com a curva de 2.3 bar e 0.8Hz mas na posição
horizontal, verifica-se que, apesar de continuar a existir uma melhoria, a diminuição de temperatura
verificada entre as curvas de 23.6% de duty cycle e as de 57.7% é inferior para os testes na posição
vertical (aos 60 segundos, no teste de 2.3 bar e 0.8Hz a curva de 23.6% apresenta uma diferença de
11.3ºC em relação à curva de 57.7% para o teste na horizontal enquanto que na vertical a diferença é
de 7ºC).
Outro resultado dos ensaios em posição vertical prende-se com o facto de agora a melhoria
verificada quando se passa do duty cycle de 57.7% para 75.2% ser superior, sendo no entanto
sempre inferior à verificada na passagem de 23.6% para 57.7%. Para 0.8Hz verifica-se que enquanto
a curva com duty cycle de 57.7% é em média 3.7ºC superior à de 75.2%, existindo pontos com
diferenças de 5ºC, a curva de 23.6% é em media 6.7ºC superior à de 57.7%, podendo existir 9.7ºC de
diferença. Verifica-se assim que a diferença média de temperaturas entre a curva de 23.6% de duty
cycle e a de 57.7% é cerca de 1.8 vezes superior à diferença encontrada entre as curvas de 57.7% e
de 75.2%. No caso do sinal com 2.6Hz (Figura 5.11b) verifica-se um comportamento semelhante no
termopar da fonte de calor.
Para os ensaios conduzidos na posição vertical verificam-se ainda diferenças ao nível do
arrefecimento na superfície que, ao contrário do verificado na posição horizontal, não é homogéneo.
Existe neste caso uma diferença de temperatura entre os termopares de superfície sendo que o
termopar de superfície 1 (termopar que está na posição mais elevada) apresenta temperaturas mais
baixas que o termopar de superfície 2. Registam-se diferenças médias de temperatura na superfície
que podem chegar a 2.6ºC (e.g. caso do duty cycle de 75.2%) para 0.8Hz ou 2.5ºC para 2.6Hz
(também para o duty cycle de 75.2%). As diferenças de temperatura na superfície chegam a atingir os
4.6ºC para 0.8Hz ou de 4.4ºC para 2.6Hz. Na Figura 5.12 apresenta-se um exemplo da diferença de
temperatura na superfície, para ensaios na posição vertical, com metanol, 2.3 bar, dnoz de 20 mm e
duty cycle de 75.2% para ambas as frequências de funcionamento.
Nos testes com o sistema na posição vertical regista-se ainda que a temperatura da superfície é
mais elevada e próxima da temperatura da fonte de calor, quando comparada para testes com as
mesmas condições mas com o sistema na horizontal. Analisando por exemplo os casos da figura
anterior, verifica-se que para 0.8Hz e 75.2% duty cycle, na posição vertical, as temperaturas
registadas pelo termopar de superfície 2 (visto ser o que apresenta uma temperatura mais elevada na
superfície) são, em média, 3.4ºC menores do que as do termopar da fonte de calor enquanto que
para o mesmo caso mas na posição horizontal, os valores de temperatura do termopar de superfície
2 apresentam-se, em média, 5.3ºC inferiores aos do termopar da fonte de calor. Desta forma, em
média, a diferença de temperatura entre a superfície e a fonte de calor é no caso horizontal cerca de
2ºC mais elevada do que no caso vertical, existindo pontos com 10.3ºC de diferença no caso
horizontal enquanto que no caso vertical não existem diferenças superiores a 5.8ºC.
Desta forma, os ensaios realizados na vertical apresentam temperaturas mais elevadas, sendo as
temperaturas de superfície mais próximas da fonte de calor, indicando um arrefecimento menos

72
eficiente (testes iniciais demonstraram que na ausência de sistema de arrefecimento a temperatura
da superfície tende a igualar a da fonte de calor). De facto, durante a variação final de 30 W do perfil
de potência, verifica-se que a recuperação de temperatura nos momentos de decaimento de potência
é mais evidente nos testes na posição horizontal do que quando o sistema está na posição vertical
(sem formação de filme de líquido), sendo que neste segundo caso a temperatura é globalmente mais
elevada.
010
20
30
40
50
60
70
0 20 40 60 80 100 120
Tempo [s]
T [ºC]
Termopar Superfície 1
Termopar Interior
Termopar Superfície 2
(a)
0
10
20
30
40
50
60
70
0 20 40 60 80 100 120
Tempo [s]
T [ºC]
Termopar Superfície 1
Termopar Interior
Termopar Superfície 2
(b)
Figura 5.12 – Testes de spray para dnoz de 20 mm, com metanol (posição vertical), 2.3 bar e um
sinal de injecção com 75.2% duty cycle e: (a) 0.8Hz; (b) 2.6Hz.
A Figura 5.13 apresenta uma comparação entre as temperaturas registadas para ensaios na
posição horizontal e vertical utilizando-se metanol, com uma pressão de injecção de 2.3 bar, dnoz de
20 mm e um sinal de abertura e fecho do injector de 0.8Hz e duty cycle de 57.7%. A figura demonstra
que o sistema de arrefecimento por spray intermitente apresenta um menor desempenho quando o
modelo experimental se encontra na vertical sendo que, considerando o termopar da fonte de calor, a
temperatura no caso vertical é em média 11.2ºC superior à do caso horizontal, existindo diferenças de
14.7ºC.
Este resultado aparece como uma contradição ao que se esperava visto que demonstra que a
extracção de calor por filme de líquido na horizontal, ainda que menos eficiente (e.g. Shedd [20] ou
Panão e Moreira [18]), conduz a resultados finais melhores em termos de temperatura. No entanto,
uma possível explicação reside no facto de embora a transferência de calor possa ser menos
eficiente com filme de líquido, a presença deste ajuda a manter a temperatura em valores mais
baixos, nomeadamente em alturas de menor potência dissipada, o que por sua vez permite um
melhor controlo da temperatura nos picos de potência. Verifica-se então que, se por um lado a
presença de filme de líquido torna a transferência e remoção de calor menos eficiente, como afirmado
em Panão e Moreira [18] e verificado no presente trabalho pelo benefício negligenciável aquando do
aumento do duty cycle acima de 60%, por outro lado este filme ajuda a manter a temperatura em
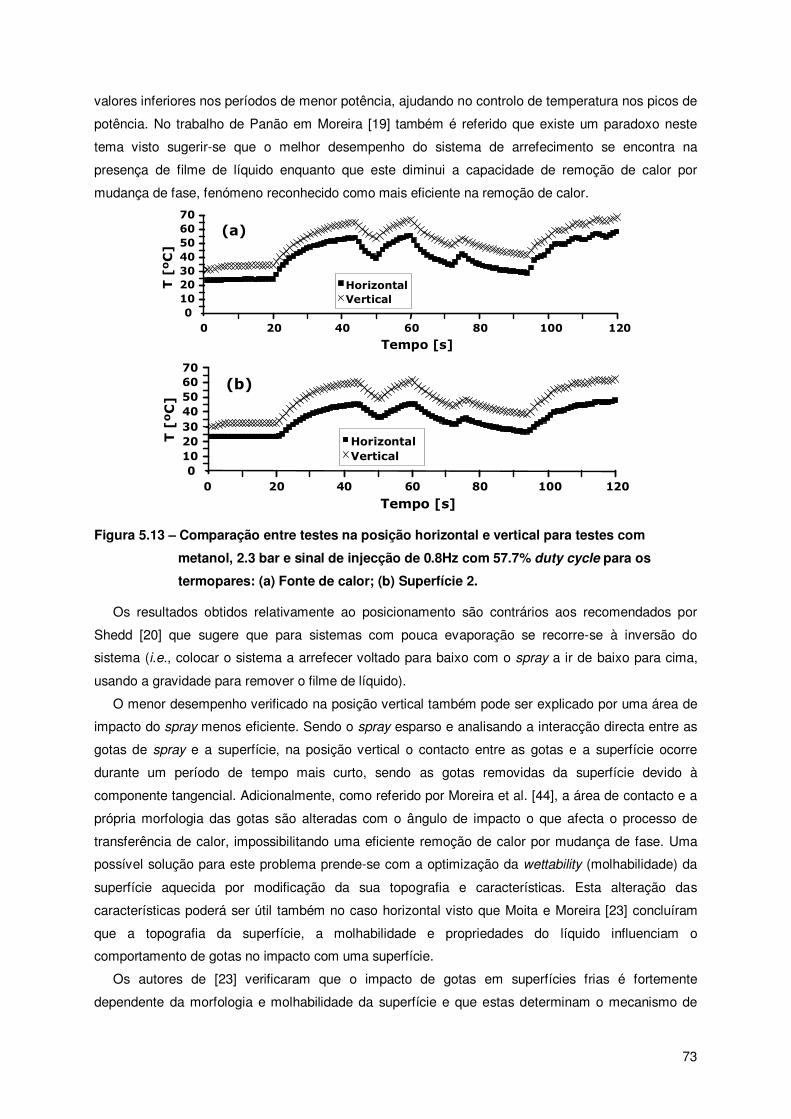
73
valores inferiores nos períodos de menor potência, ajudando no controlo de temperatura nos picos de
potência. No trabalho de Panão em Moreira [19] também é referido que existe um paradoxo neste
tema visto sugerir-se que o melhor desempenho do sistema de arrefecimento se encontra na
presença de filme de líquido enquanto que este diminui a capacidade de remoção de calor por
mudança de fase, fenómeno reconhecido como mais eficiente na remoção de calor.
0
10
20
30
40
50
60
70
0 20 40 60 80 100 120
Tempo [s]
T [ºC]
Horizontal
Vertical
(a)
0
10
20
30
40
50
60
70
0 20 40 60 80 100 120
Tempo [s]
T [ºC]
Horizontal
Vertical
(b)
Figura 5.13 – Comparação entre testes na posição horizontal e vertical para testes com
metanol, 2.3 bar e sinal de injecção de 0.8Hz com 57.7% duty cycle para os
termopares: (a) Fonte de calor; (b) Superfície 2.
Os resultados obtidos relativamente ao posicionamento são contrários aos recomendados por
Shedd [20] que sugere que para sistemas com pouca evaporação se recorre-se à inversão do
sistema (i.e., colocar o sistema a arrefecer voltado para baixo com o spray a ir de baixo para cima,
usando a gravidade para remover o filme de líquido).
O menor desempenho verificado na posição vertical também pode ser explicado por uma área de
impacto do spray menos eficiente. Sendo o spray esparso e analisando a interacção directa entre as
gotas de spray e a superfície, na posição vertical o contacto entre as gotas e a superfície ocorre
durante um período de tempo mais curto, sendo as gotas removidas da superfície devido à
componente tangencial. Adicionalmente, como referido por Moreira et al. [44], a área de contacto e a
própria morfologia das gotas são alteradas com o ângulo de impacto o que afecta o processo de
transferência de calor, impossibilitando uma eficiente remoção de calor por mudança de fase. Uma
possível solução para este problema prende-se com a optimização da wettability (molhabilidade) da
superfície aquecida por modificação da sua topografia e características. Esta alteração das
características poderá ser útil também no caso horizontal visto que Moita e Moreira [23] concluíram
que a topografia da superfície, a molhabilidade e propriedades do líquido influenciam o
comportamento de gotas no impacto com uma superfície.
Os autores de [23] verificaram que o impacto de gotas em superfícies frias é fortemente
dependente da morfologia e molhabilidade da superfície e que estas determinam o mecanismo de

74
desintegração em superfícies de baixa rugosidade. De facto, de acordo com [23], a ebulição de
líquido em superfícies de elevada rugosidade ocorre nos instantes iniciais do espalhamento do líquido
na superfície o que é atribuído a uma melhoria da transferência de calor associada com um aumento
do contacto líquido-sólido pelo que é defendido em [23] que o aumento da rugosidade da superfície
resulta em gotas secundarias maiores. Num outro trabalho, Moita e Moreira [24] referem os efeitos
que a topografia da superfície, mais concretamente a rugosidade, têm no desempenho do
arrefecimento de superfícies com gotas, tendo concluído que o período de contacto está dependente
das propriedades do líquido mas que é também fortemente afectado pela rugosidade da superfície.
Também em Moita e Moreira [25] é referido que as características das gotas secundarias estão
fortemente relacionadas com o calor latente e tensão superficial do líquido utilizado mas, ao mesmo
tempo, que é a textura da superfície de impacto que influência e melhora a ebulição, sendo que no
entanto gera gotas secundarias maiores.
A análise do trabalho de Moita e Moreira [23, 24, 25] sugere que o estudo da superfície em termos
de rugosidade, bem como o estudo das condições necessárias para melhorar a molhabilidade da
superfície, pode beneficiar ou solucionar alguns dos problemas encontrados em termos de
desempenho do sistema de arrefecimento quando o modelo experimental está na vertical, sendo que
estes resultados podem também ser utilizados para melhorar o caso horizontal. Apesar destes
estudos se referirem a gotas isoladas e não sprays, podem ser adaptados ao trabalho da presente
tese visto o spray utilizado ser bastante esparso, facto que permite considerar a interacção das gotas
do spray de forma semelhante à considerada por estes autores no estudo do impacto de gotas em
superfícies frias e aquecidas.
Relativamente ao estudo aqui apresentado, para se perceber a influência da orientação do modelo
experimental na temperatura final do sistema, é possível concluir que as temperaturas registadas
para a posição vertical são sempre superiores às registadas para a posição horizontal. Desta forma,
tendo em conta o importante papel do ângulo de contacto entre as gotas e a superfície e a
importância demonstrada pelo filme de líquido na manutenção da temperatura, a recomendação é
que um sistema de arrefecimento baseado em ISC funcione com o processador na posição
horizontal. Esta recomendação não é impeditiva relativamente à aplicação em sistemas reais visto
que existem actualmente no mercado diversas ofertas (desktop ou servidores) que se baseiam numa
distribuição interna de hardware que coloca o processador na posição horizontal. São exemplos
alguns dos novos desktop HP Compaq para empresas ou alguns dos sistemas de servidor da Intel®.
Ainda em relação aos testes na posição vertical foi possível verificar que em termos de parâmetros
analisados o duty cycle continua a ser um parâmetro dominante relativamente à frequência do sinal
de injecção e, apesar de não ter sido apresentado nenhum gráfico comparativo, a frequência tem um
efeito negligenciável na posição vertical, tal como nos testes realizados na horizontal. De facto,
comparando as curvas obtidas por variação da frequência de injecção, considerando o duty cycle
constante, verificam-se resultados muito similares entre as curvas de 0.8Hz e 2.6Hz. A titulo de
exemplo, considerando ensaios com metanol, a uma pressão de injecção de 2.3 bar, dnoz de 20 mm,
posição vertical e duty cycle de 75.2%, a análise do termopar da fonte de calor permite verificar que
existe uma diferença média de temperaturas de apenas 2.8ºC entre as curvas de 0.8Hz e de 2.6Hz.

75
Verifica-se um comportamento similar para os restantes duty cycle e, para o termopar da fonte de
calor, a diferença média de temperatura entre as curvas de 0.8Hz e 2.6Hz é sempre inferior a 3.5ºC.
Para os termopares de superfície o mesmo se verifica, mesmo considerando o facto de o
arrefecimento da superfície não ser homogéneo. Novamente para as condições de teste de metanol,
2.3 bar, dnoz de 20 mm, posição vertical e duty cycle de 75.2%, a análise do termopar de superfície 1
indica uma diferença média de temperaturas de apenas 3ºC entre as curvas de 0.8Hz e de 2.6Hz e o
termopar de superfície 2 apresenta uma diferença média de temperatura, entre curvas, inferior a
3.5ºC.
Testes efectuados permitiram ainda demonstrar que, tal como na posição horizontal, existe para o
duty cycle uma gama óptima situada entre os 50% e 60%, apesar de na vertical os aumentos acima
de 60% conduzirem a melhorias ligeiramente superiores às verificadas na horizontal.
Por fim, o último parâmetro a analisar era o tipo de líquido utilizado no sistema. Panão e Moreira
[19] já haviam referido a importância das propriedades do líquido de arrefecimento nomeadamente
em termos de ponto de ebulição e calor latente de vaporização e Moita e Moreira [24, 25] referiram a
importância das propriedades do líquido de arrefecimento em termos da sua influência no período de
contacto das gotas com a superfície, bem como na influência que se observa relativamente às
próprias características das gotas. Também Bonner III et al. [30] calcularam coeficientes de
transferência de calor para TTV com o uso de diversos líquidos tendo concluído que o arrefecimento
dependia do tipo de líquido utilizado.
Neste contexto, foram efectuados ensaios para demonstrar a importância das propriedades do
líquido de arrefecimento num sistema de spray intermitente. Para tal aplicou-se o sistema de
arrefecimento novamente ao modelo experimental durante a execução do perfil de potência, para
uma pressão de injecção de 2.3 bar, utilizando HFE7100 da 3M. Foram conduzidos testes para
ambas as frequências e, em cada frequência, foi analisado o efeito do duty cycle. Para todos os
testes efectuados o modelo experimental encontrava-se na posição horizontal com dnoz = 20 mm.
Os resultados mostram que, apesar do líquido utilizado ser diferente, o facto de o modelo
experimental se encontrar na posição horizontal permite novamente obter um arrefecimento
homogéneo em toda a superfície pelo que a análise de resultados apenas incide sobre um dos
termopares de superfície. Para demonstrar esta situação a Figura 5.14 apresenta a evolução da
temperatura para ensaios com um sinal de controlo do injector de 0.8Hz e 75.2% duty cycle, para
HFE7100, a uma pressão de injecção de 2.3 bar, na horizontal com dnoz = 20 mm. Na figura verifica-
se que a diferença média entre os termopares da superfície é de apenas 0.62ºC, não existindo
nenhum ponto com diferenças superiores a 2ºC. Os restantes testes apresentam um comportamento
semelhante. Por exemplo, para os testes com sinal de injecção de 0.8Hz e 23.6% de duty cycle a
diferença média de temperatura na superfície é de apenas 0.63ºC e para o caso com a mesma
frequência e 57.7% de duty cycle a diferença média de temperatura é de apenas 0.69ºC. O mesmo
acontece para 2.6Hz.

76
01020304050607080
0 20 40 60 80 100 120
Tempo [s]
T [ºC]
Termopar Superfície 1
Termopar Interior
Termopar Superfície 2
Figura 5.14 – Teste de spray intermitente recorrendo a HFE7100, 2.3 bar, posição horizontal,
com dnoz de 20 mm e um sinal de injecção de 0.8Hz com 75.2% duty cycle.
Relativamente ao duty cycle, a Figura 5.15 apresenta os resultados obtidos para o termopar da
fonte de calor ao variar o duty cycle para ambas as frequências de teste. A figura permite identificar
uma considerável diferença entre as temperaturas obtidas para os ensaios com HFE7100 e os
ensaios com metanol. De facto, ao comparar estes resultados com os obtidos para as mesmas
condições para metanol, as temperaturas registadas com o uso de HFE7100 são muito superiores.
Este era um facto esperado visto que as propriedades do líquido influenciam o comportamento do
sistema de arrefecimento e ao comparar o metanol com o HFE7100 verifica-se que apesar do seu
ponto de ebulição ser semelhante, o calor latente de vaporização do metanol é aproximadamente 9
vezes superior ao do HFE7100 (ver Tabela 4.1).
0
20
4060
80
100
120
0 20 40 60 80 100 120
Tempo [s]
T [ºC]
Duty 23.6%
Duty 57.7%
Duty 75.2%MAX TEMPERATURA STOP
(a)
0
20
40
60
80
100
120
0 20 40 60 80 100 120
Tempo [s]
T [ºC]
Duty 23.6%
Duty 57.7%
Duty 75.2%MAX TEMPERATURA STOP
(b)
Figura 5.15 – Temperatura no termopar da fonte de calor após variação do duty cycle, usando
HFE7100, 2.3 bar, posição horizontal, dnoz de 20 mm para: (a) 0.8Hz; (b) 2.6Hz.
A Figura 5.16 apresenta a comparação directa entre metanol e HFE7100 para os duty cycle
testados para a frequência de 0.8Hz, estando o modelo experimental na posição horizontal, utilizando

77
uma pressão de injecção de 2.3 bar e dnoz = 20 mm. A análise dos resultados indica um desempenho
superior nos testes com metanol, demonstrando assim a importância do calor latente de vaporização
do líquido. Adicionalmente o uso de HFE7100 demonstrou de forma clara a fragilidade em termos de
resposta dos duty cycle reduzidos, sendo necessário interromper o teste de menor duty cycle antes
do final do perfil para evitar danos no sistema (assinalado nas figuras por MAX TEMPERATURA
STOP). Este comportamento também se verifica para o sinal de injecção de 2.6Hz. Os dados indicam
que duty cycle reduzidos (que provocam redução do fluxo de líquido injectado) não são suficientes
para manutenção da temperatura do sistema, mesmo variando a frequência, cujo efeito, tal como no
caso do metanol, se demonstra negligenciável.
0
20
40
60
80
100
120
0 20 40 60 80 100 120
Tempo [s]
T [ºC]
HFE 7100
Metanol
MAX TEMPERATURA STOP
(a)
0102030405060708090100
0 20 40 60 80 100 120
Tempo [s]
T [ºC]
HFE 7100
Metanol
(b)
01020304050607080
0 20 40 60 80 100 120
Tempo [s]
T [ºC]
HFE 7100
Metanol
(c)
Figura 5.16 – Efeitos das propriedades do líquido de arrefecimento na temperatura do termopar
da fonte de calor, para testes com dnoz de 20 mm, posição horizontal, 2.3 bar e
sinais de injecção de 0.8Hz com duty cycle de: (a) 23.6%; (b) 57.7%; (c) 75.2%.
Analisando a Figura 5.16 compreende-se que a diferença de 9 vezes no calor latente é suficiente
para se encontrarem diferenças médias de temperatura entre as curvas, para o termopar da fonte de
calor, de 17.2ºC (duty cycle de 23.6% - Figura 5.16a), ou 22.1ºC (57.7% - Figura 5.16b), ou 16.5ºC
(75.2% - Figura 5.16c). Para a frequência de injecção de 2.6Hz o comportamento é semelhante. As
diferenças podem chegar, para o termopar da fonte de calor, a pontos com 43ºC de diferença (no
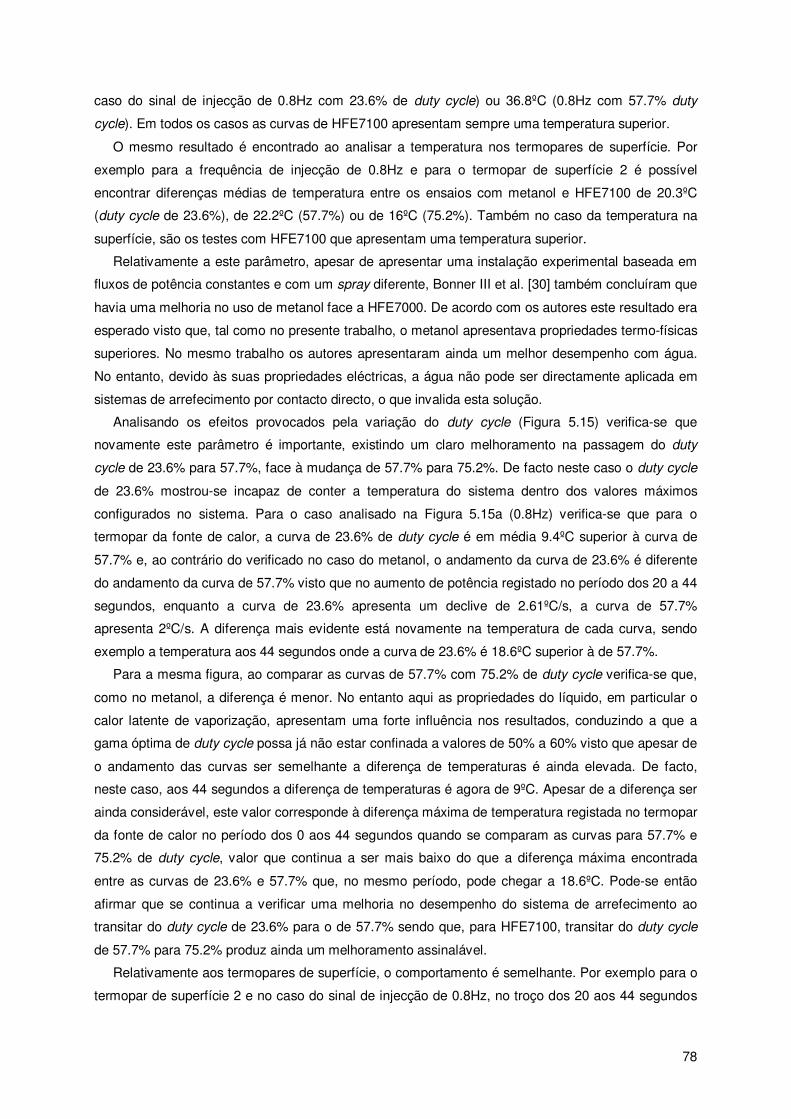
78
caso do sinal de injecção de 0.8Hz com 23.6% de duty cycle) ou 36.8ºC (0.8Hz com 57.7% duty
cycle). Em todos os casos as curvas de HFE7100 apresentam sempre uma temperatura superior.
O mesmo resultado é encontrado ao analisar a temperatura nos termopares de superfície. Por
exemplo para a frequência de injecção de 0.8Hz e para o termopar de superfície 2 é possível
encontrar diferenças médias de temperatura entre os ensaios com metanol e HFE7100 de 20.3ºC
(duty cycle de 23.6%), de 22.2ºC (57.7%) ou de 16ºC (75.2%). Também no caso da temperatura na
superfície, são os testes com HFE7100 que apresentam uma temperatura superior.
Relativamente a este parâmetro, apesar de apresentar uma instalação experimental baseada em
fluxos de potência constantes e com um spray diferente, Bonner III et al. [30] também concluíram que
havia uma melhoria no uso de metanol face a HFE7000. De acordo com os autores este resultado era
esperado visto que, tal como no presente trabalho, o metanol apresentava propriedades termo-físicas
superiores. No mesmo trabalho os autores apresentaram ainda um melhor desempenho com água.
No entanto, devido às suas propriedades eléctricas, a água não pode ser directamente aplicada em
sistemas de arrefecimento por contacto directo, o que invalida esta solução.
Analisando os efeitos provocados pela variação do duty cycle (Figura 5.15) verifica-se que
novamente este parâmetro é importante, existindo um claro melhoramento na passagem do duty
cycle de 23.6% para 57.7%, face à mudança de 57.7% para 75.2%. De facto neste caso o duty cycle
de 23.6% mostrou-se incapaz de conter a temperatura do sistema dentro dos valores máximos
configurados no sistema. Para o caso analisado na Figura 5.15a (0.8Hz) verifica-se que para o
termopar da fonte de calor, a curva de 23.6% de duty cycle é em média 9.4ºC superior à curva de
57.7% e, ao contrário do verificado no caso do metanol, o andamento da curva de 23.6% é diferente
do andamento da curva de 57.7% visto que no aumento de potência registado no período dos 20 a 44
segundos, enquanto a curva de 23.6% apresenta um declive de 2.61ºC/s, a curva de 57.7%
apresenta 2ºC/s. A diferença mais evidente está novamente na temperatura de cada curva, sendo
exemplo a temperatura aos 44 segundos onde a curva de 23.6% é 18.6ºC superior à de 57.7%.
Para a mesma figura, ao comparar as curvas de 57.7% com 75.2% de duty cycle verifica-se que,
como no metanol, a diferença é menor. No entanto aqui as propriedades do líquido, em particular o
calor latente de vaporização, apresentam uma forte influência nos resultados, conduzindo a que a
gama óptima de duty cycle possa já não estar confinada a valores de 50% a 60% visto que apesar de
o andamento das curvas ser semelhante a diferença de temperaturas é ainda elevada. De facto,
neste caso, aos 44 segundos a diferença de temperaturas é agora de 9ºC. Apesar de a diferença ser
ainda considerável, este valor corresponde à diferença máxima de temperatura registada no termopar
da fonte de calor no período dos 0 aos 44 segundos quando se comparam as curvas para 57.7% e
75.2% de duty cycle, valor que continua a ser mais baixo do que a diferença máxima encontrada
entre as curvas de 23.6% e 57.7% que, no mesmo período, pode chegar a 18.6ºC. Pode-se então
afirmar que se continua a verificar uma melhoria no desempenho do sistema de arrefecimento ao
transitar do duty cycle de 23.6% para o de 57.7% sendo que, para HFE7100, transitar do duty cycle
de 57.7% para 75.2% produz ainda um melhoramento assinalável.
Relativamente aos termopares de superfície, o comportamento é semelhante. Por exemplo para o
termopar de superfície 2 e no caso do sinal de injecção de 0.8Hz, no troço dos 20 aos 44 segundos

79
encontra-se um declive de 2.58ºC/s para a curva de 23.6% de duty cycle contra 1.69ºC/s para o caso
de 57.7%. A temperatura aos 44 segundos é 21.3ºC mais elevada para a curva de 23.6%. Para o
mesmo termopar verifica-se um declive de 1.59ºC/s, no mesmo troço, para o duty cycle de 75.2%, o
que pode ser considerado como semelhante com o declive da curva de 57.7%. Neste caso, aos 44
segundos existe uma diferença de 10.8ºC entre as duas curvas, sendo a curva de 57.7% a que
apresenta uma temperatura superior.
Este facto está relacionado com a vaporização do líquido na superfície que, devido ao facto do
HFE7100 ter um calor latente de vaporização menor, conduz a uma evaporação de líquido na
superfície mais rápida pelo que a formação de filme de líquido apenas se fará notar em fluxos de
líquidos superiores, i.e., para valores de duty cycle mais elevados. Desta forma, as propriedades do
líquido de arrefecimento podem afectar a gama óptima de duty cycle na medida em que, ao utilizar
um líquido com um calor latente de vaporização menor, a gama óptima de duty cycle irá,
provavelmente, aumentar ligeiramente.
Relativamente à variação verificada por mudança da frequência de injecção, tal como verificado
em todos os casos anteriores, desde que o duty cycle seja mantido constante, as diferenças
encontradas são negligenciáveis. Por exemplo, para o termopar da fonte de calor, considerando um
sinal de injecção com um duty cycle de 57.7%, a diferença média de temperatura entre as curvas de
0.8Hz e 2.6Hz é inferior a 3.5ºC e no caso de 75.2% verifica-se que ambas as curvas não diferem, em
média, mais do que 0.9ºC para o termopar da fonte de calor. Para o mesmo termopar e para o sinal
de injecção com 23.6% de duty cycle a diferença média, comparando as frequências, é de apenas
1.8ºC.
É então possível afirmar que, como esperado, as propriedades do líquido são importantes e
podem significar alterações no comportamento do sistema de arrefecimento. No entanto a escolha do
líquido a usar num sistema deste tipo encontra-se limitada pela oferta existente no mercado visto que,
apesar de existirem hoje em dia diversos líquidos com aplicação em sistemas de arrefecimento, é
necessário ponderar os seus custos e disponibilidade, visto serem factores essenciais para o sucesso
de um sistema de arrefecimento com aplicação num caso real. Por outro lado, uma correcta escolha
de duty cycle de injecção e da posição do sistema podem ajudar na gestão de líquido utilizado e ao
mesmo tempo compensar alguma dificuldade que possa surgir caso seja necessário optar por um
líquido economicamente mais apelativo, mesmo que isso signifique abdicar de algumas das suas
propriedades. A recomendação em termos de líquido baseia-se numa escolha ponderada das
propriedades que se pretendem para cada aplicação, nomeadamente ao nível do ponto de ebulição e
calor latente de vaporização. Ao escolher um líquido para uma aplicação de arrefecimento,
especialmente se for para contacto directo, deve-se ainda ter em conta as recomendações fornecidas
por Bar-Cohen et al. [6] visto que este tipo de líquido deve apresentar características químicas,
eléctricas e térmicas que se coadunem com a aplicação em dispositivos microelectronicos.
Shedd [20] também referiu a importância do líquido utilizado, tendo descrito algumas das
características analisadas e a sua influência no comportamento do sistema de arrefecimento.
Do ponto de vista de aplicação desta tecnologia de arrefecimento, o líquido a utilizar não comporta
nenhuma restrição.

80
Analisando de forma global a aplicabilidade da tecnologia de ISC a processadores reais concluiu-
se que não existe nenhum impedimento. Os resultados obtidos demonstram que, apesar de se
recorrer a um sistema de spray experimental e em desenvolvimento, foi possível verificar que este
tipo de tecnologia tem capacidade de manter a temperatura do sistema constante e, com a
conjugação de alguns parâmetros sem qualquer optimização final, é capaz de manter o sistema
abaixo das temperaturas impostas pelo fabricante do processador que se pretende simular (recordar
Figura 5.7).
O estudo realizado não permite uma comparação directa com os actuais sistemas de
arrefecimento em comercialização visto que o sistema testado apenas pretendia analisar os
parâmetros a considerar e não optimizar o sistema com vista à obtenção de um sistema final. No
entanto, as potencialidades demonstradas vão ao encontro de alguns dos trabalhos existentes na
literatura, nomeadamente Bar-Cohen et al. [6] que concluíram que, apesar de a comercialização
deste tipo de sistemas por mudança de fase necessitar ainda de mais investigação, os resultados
demonstrados permitem afirmar o uso promissor deste tipo de tecnologia de arrefecimento por
contacto directo com spray no arrefecimento de microprocessadores, mesmo na presença de
situações exigentes. Também Cader et al. [13] concluíram a possibilidade de aplicação de sprays
contínuos no arrefecimento de processadores reais, tendo comprovado que para uma comparação
directa entre soluções de arrefecimento a ar e spray para processadores reais (AMD Opterons) existe
uma redução de temperatura de 81.2ºC para 47.9ºC ao mesmo tempo que se verifica uma redução
de 35% no consumo de potência.
Apesar de o presente trabalho não ter permitido encontrar temperaturas para o spray intermitente
mais reduzidas do que o arrefecimento a ar, é necessário referir que o presente trabalho apenas
utilizou um único spray. Pelo contrário, Cader et al. [13] basearam-se numa instalação experimental
que comporta uma organização de 3 x 4 atomizadores.
Em termos de controlo de temperatura a recomendação final é que a análise da temperatura seja
realizada próximo da fonte de calor em vez de no encapsulamento visto que, devido às resistências
térmicas, um arrefecimento exterior eficiente não significa necessariamente um correcto
arrefecimento da fonte de calor.

81
Capítulo 6 - Conclusão e sugestões para trabalho futuro
A presente tese reportou um estudo sobre sistemas de arrefecimento para processadores de
computadores pessoais, pelo que um dos objectivos era criar as condições necessárias para estudar
e desenvolver novos sistemas de arrefecimento. Neste contexto, mostrou-se ser possível desenvolver
um modelo experimental que reproduz o comportamento térmico de processadores reais. De facto,
após a fase de desenvolvimento, foi possível concluir que um sistema cujo aquecimento recorra a
resistências, embora capaz de reproduzir temperaturas realistas em alguns casos, não é capaz de
atingir as temperaturas pretendidas com uma resposta temporal e dissipação de potência
equivalentes à de um sistema real.
Por outro lado, utilizando um sistema cuja fonte de calor se baseia num transístor, é possível,
recorrendo a circuitos auxiliares e um correcto sistema de controlo, desenvolver um sistema capaz de
reproduzir o comportamento térmico de um processador real em termos de temperatura, resposta
temporal e controlo de potência dissipada. O sistema desenvolvido permite testes com dissipações de
potência constante e reprodução de perfis de potência equivalentes aos de um processador real. O
sistema é ainda capaz de realizar testes de temperatura constante em relação a um termopar de
referência.
Verificou-se também que a melhor solução para analisar a temperatura do sistema se baseava no
uso de 3 termopares: 2 na superfície aquecida e 1 em contacto directo com a fonte de calor.
Assim sendo, utilizando o sistema criado, foram testados dois sistemas de arrefecimento de uso
corrente, um sistema baseado em convecção forçada a ar e outro baseado em arrefecimento
indirecto recorrendo a água (Watercooling). Desde logo se verificou que em ambos os sistemas o
aquecimento/arrefecimento da superfície era uniforme.
Os resultados obtidos demonstraram que, para os testes de potência constante e perfil de
potência, embora com diferenças reduzidas, o sistema de contacto indirecto a água consegue sempre
manter o modelo experimental com temperaturas mais reduzidas, sendo que, para os testes de
potência constante, o sistema de água estabiliza a temperatura em menos tempo. Este
comportamento verificou-se para o termopar da fonte de calor e para ambos os termopares de
superfície. No caso dos testes de perfil de potência verificou-se ainda que, exceptuando a diferença
de temperatura, o andamento das curvas era semelhante.
Os resultados encontram-se de acordo com outros trabalhos da literatura e, embora não seja
possível afirmar um claro domínio de uma das tecnologias de arrefecimento, o facto é que o sistema
indirecto a água mostra uma ligeira melhoria ao mesmo tempo que, pelas suas características,
poderá apresentar uma maior capacidade de se adaptar a sistemas com maior dissipação de
potência.
Adicionalmente ao estudo de sistemas de uso corrente, pretendia-se desenvolver e testar a
aplicabilidade de um sistema de arrefecimento por contacto directo baseado em Spray Cooling
Intermitente. Deste modo, após desenvolver um sistema deste tipo para aplicação no modelo
experimental, pretendia-se estudar os diversos parâmetros controláveis neste tipo de sistema para

82
verificar se existiam impedimentos à aplicação desta tecnologia a casos reais, bem como verificar
quais os principais parâmetros a ser optimizados no desenvolvimento de um sistema comercial. Não
se pretendia neste trabalho realizar uma comparação directa deste sistema com os de uso corrente
mas sim estudar a sua aplicabilidade num futuro próximo.
Os parâmetros testados foram o sinal (frequência e duty cycle) e pressão de injecção, distância
entre o atomizador e a superfície a arrefecer, a posição do sistema a arrefecer (horizontal versus
vertical para analisar a influência da formação de filme de líquido) e as propriedades do líquido
utilizado.
Verificou-se que, excepto na posição vertical, o aquecimento/arrefecimento da superfície é
uniforme.
A análise dos termopares de superfície e da fonte de calor permitiu demonstrar as potencialidades
que sistemas de contacto directo poderão ter devido à importância da resistência térmica existente
nos dissipadores de contacto existentes nos actuais processadores.
Relativamente à distância entre o atomizador e a superfície a arrefecer foi possível concluir que,
após variar a distância absoluta desde poucos milímetros (≈ 5 mm) até distâncias elevadas, para este
tipo de sistema (acima dos 80 mm), este é um parâmetro importante a considerar e que existe uma
posição óptima (para o sistema testado) situada entre os 20 e 30 mm. Verificou-se ainda que o
desempenho do sistema se deteriorava para distâncias acima ou abaixo desta gama óptima,
resultado que pode ser explicado pelo facto de o melhor desempenho ser alcançado quando a área
do spray circunscreve a superfície aquecida, considerando uma superfície quadrada, visto que fora
desta posição o spray apenas arrefece uma parcela da área (distâncias curtas) ou parte do líquido é
desperdiçado por não embater na superfície (distâncias longas). A distância encontrada é compatível
com a aplicação num caso real.
Relativamente ao sinal de injecção, variando este por 3 duty cycle ao longo de 2 frequências
verifica-se que, garantindo que o fluxo total de líquido é o mesmo em todos os casos, a frequência
tem uma influência negligenciável no desempenho do sistema de arrefecimento, mesmo
considerando frequências com diferenças entre si de 3.25 vezes. Por outro lado, o duty cycle
mostrou-se como sendo um parâmetro fundamental a considerar não só no sinal de injecção mas
também com importância elevada face aos restantes parâmetros.
Desde logo se verificou que a combinação de frequências elevadas com duty cycle reduzidos,
situação por vezes referida como ideal, não se demonstrava eficaz na manutenção da temperatura.
Foi possível concluir acerca de uma gama de valores óptimos de duty cycle que, apesar de puder
variar ligeiramente com a mudança de líquido, se situa, neste trabalho, na gama dos 50% a 60%. De
facto verificou-se um considerável melhoramento ao passar de reduzidos duty cycle para valores
intermédios (na gama óptima) sendo que após esta gama os benefícios eram reduzidos. Este valor
permite uma poupança considerável de líquido face a sistemas de spray contínuos. Este
comportamento verificou-se para a temperatura da fonte de calor e da superfície.
Assim sendo, a recomendação para casos reais é a do uso de um sinal de controlo com apenas
um duty cycle intermédio ou um sistema como o utilizado por alguns sistemas convencionais a ar que
se baseia em dois modos de funcionamento, um normal e um de alto desempenho sendo neste caso

83
aplicado um duty cycle intermédio no funcionamento normal, mudando para um duty cycle elevado
em situações mais exigentes (por questões de segurança). A sugestão do uso de apenas um valor de
duty cycle poderá permitir um controlo simples o que poderá conduzir a um sistema comercialmente
competitivo. O uso de duty cycle reduzidos deverá ser limitado a sistemas cujas exigências de
dissipação sejam inferiores às verificadas em processadores como o presentemente simulado.
Face à criação de um sistema de controlo intermitente, não existe qualquer limitação da aplicação
deste sistema a casos reais.
Relativamente à pressão de injecção, apesar de se variar a pressão por 3 valores cujos limites
distam mais do dobro entre si, a influência deste parâmetro mostrou-se negligenciável pelo que se
recomenda o uso da mínima pressão que garanta uma boa atomização para evitar limitações à
aplicação deste sistema em casos reais.
Face ao estudo realizado para perceber a influência que o filme de líquido teria na temperatura
final do sistema é possível concluir que os valores obtidos para a posição vertical são superiores aos
obtidos para a posição horizontal. De facto, a diminuição de temperatura verificada na passagem de
duty cycle reduzidos para valores na gama óptima é menor no caso vertical, sendo no entanto ainda
de assinalar que o duty cycle continua no caso vertical a desempenhar um importante papel.
As diferenças verificadas no caso vertical podem dever-se à não existência de filme de líquido
que, apesar de menos eficiente na remoção de calor, permite que o sistema atinja temperaturas mais
reduzidas, podendo ainda dever-se a uma área de subscrição do spray menos eficiente na posição
vertical. Considerando a aplicação desta tecnologia a processadores reais, a recomendação é que
um sistema de arrefecimento baseado em Spray Cooling Intermitente funcione com o processador na
posição horizontal. Esta recomendação não é impeditiva relativamente à aplicação em sistemas reais
visto que existem actualmente sistemas com uma distribuição interna de hardware que colocam o
processador na posição horizontal.
Por fim, para analisar a influência das propriedades do líquido de arrefecimento, foram realizados
ensaios com líquidos diferentes cujos pontos de vaporização são semelhantes mas o calor latente
dista de 9 vezes. O uso de um líquido com um calor latente 9 vezes superior demonstrou-se como
sendo melhor em todos os casos testados pelo que, como esperado, as propriedades do líquido são
importantes e podem significar alterações consideráveis no comportamento do sistema de
arrefecimento sendo que a escolha do líquido deverá ter em conta o sistema a arrefecer.
Apesar de as propriedades do líquido serem importantes na criação de um sistema deste tipo, a
sua escolha poderá estar limitada em termos de oferta de mercado, nomeadamente em termos de
custos. No entanto poderá tentar-se compensar com o duty cycle algumas dificuldades que possam
surgir, caso seja necessário optar por um líquido economicamente mais apelativo.
Analisando os resultados obtidos nos testes do sistema de ISC, os principais parâmetros a
considerar são a distância entre o atomizador e a superfície, o duty cycle do sinal de abertura e fecho
do injector, a posição do sistema a arrefecer e as propriedades do líquido.
Como conclusão final acerca da aplicabilidade de soluções de Spray Cooling Intermitente ao
arrefecimento de processadores reais, o presente trabalho demonstrou que é uma possibilidade
viável visto não existirem parâmetros restritivos à sua aplicabilidade, sendo possível que o sistema

84
apresente melhor desempenho após optimização. Adicionalmente, existe a possibilidade de utilizar
estes sistemas com contacto directo, conseguindo assim remover a resistência térmica que os
actuais processadores comportam nas interfaces com os sistemas de arrefecimento indirectos.
Tendo em conta as diferenças verificadas na temperatura da superfície em relação à da fonte de
calor, sugere-se que a temperatura a ser considerada por um sistema de controlo seja a temperatura
da fonte de calor para evitar danos no sistema visto que, devido às resistências térmicas dos IHS, a
temperatura da superfície poderá não traduzir fielmente a temperatura real do sistema.
Em termos de trabalho a desenvolver sugere-se a construção de um novo modelo experimental
visto que, apesar de o sistema construído ser similar ao caso real, com base no conhecimento
adquirido será possível criar um chip (construído em termos de microelectrónica) com a introdução de
pontos de aquecimento não homogéneos na área aquecida. O novo sistema deverá continuar a
permitir um controlo de potência dissipada. Sugere-se ainda a introdução de diversos sensores de
temperatura, com base em junções pn do circuito, para permitir avaliar o sistema em diversos pontos
(nomeadamente no interior do chip). O sistema a desenvolver deverá ter em conta o conhecimento
adquirido com o presente trabalho com vista a aperfeiçoar sistemas do tipo thermal test vehicles.
Relativamente ao estudo comparativo dos sistemas de arrefecimento sugere-se um estudo
aprofundado das características do sistema de líquido indirecto para analisar a influência dos diversos
parâmetros (e.g. líquido utilizado ou fluxos) para tentar optimizar o sistema.
Em termos do sistema de ISC sugere-se a continuação do estudo para optimizar os parâmetros
aqui encontrados como fundamentais, ao mesmo tempo que se sugere o estudo de outros
parâmetros (e.g. importância da topografia da superfície aquecida) em condições reais como as
testadas no presente trabalho. Poderá ainda ser analisada a interacção de sistemas com múltiplos
sprays.

85
Referências
[1] Sedra, A. S., Smith, K. C., “Microelectronic Circuits”, 5ª edição, Oxford University Press,
2004.
[2] “Moore’s Law – Made real by Intel® Innovation”, Intel® (disponível em
http://www.intel.com/technology/mooreslaw/).
[3] “60 Years of the transistor: 1947-2007”, Intel® (disponível em
http://www.intel.com/technology/timeline.pdf).
[4] Hennessy, J., Patterson, D. A., “Computer Architecture: A Quantitative Approach”, 3ª
edição, Morgan Kaufmann, 2003.
[5] El-Genk, M. S., Bostanci, H., “Combined effects of subcooling and surface orientation on
pool boiling of HFE-7100 from a simulated electronic chip”, Experimental Heat Transfer,
vol. 16, pp. 281-301, 2003.
[6] Bar-Cohen, A., Arik, M., Ohadi, M., “Direct Liquid Cooling of High Flux Micro and Nano
Electronic Components”, Proceedings of the IEEE, vol. 94, n. 8, pp. 1549-1570, Agosto
2006.
[7] Chu, R. C., “The perpetual challenges of electronics cooling technology for computer
product applications – from Laptop to Supercomputer”, National Taiwan University
Presentation, Taiwan, Novembro 2003.
[8] Sêrro, C., “Introdução – Aula 2”, Arquitectura Avançada de Computadores – Instituto
Superior Técnico, 2006/2007 (disponível em http://comp.ist.utl.pt/ec-ac/Files/pdfs.htm).
[9] Santos, M., Teixeira, J. P., “Microelectrónica: Colectânea de Transparências”,
Microelectrónica – Instituto Superior Técnico, 2005.
[10] Fernandes, J., “Electrónica I”, Electrónica I – Instituto Superior Técnico, 2005/2006.
[11] Tonapi, S. S., Fillion, R. A., Schattenmann, F. J., Cole, H. S., Evans, J. D., Sammakia, B.
G., “An Overview of Thermal Management for Next Generation Microelectronic Devices”,
IEEE/SEMI Advanced Manufacturing Conference, 2003.
[12] Paik, P. Y., Chakrabarty, K., Pamula, V. K., “Adaptive Cooling of Integrated Circuits Using
Digital Microfluidics”, Artech House, 2007.
[13] Cader, T., Westra, L. J., Eden, R. C., “Spray Cooling Thermal Management for Increased
Device Reliability”, IEEE Transactions on Device and Materials Reliability, vol. 4, n. 4,
Dezembro 2004.
[14] Incropera, F. P., DeWitt, D. P., “Fundamentos de Transferência de Calor e Massa”, 3ª
edição, Versão Portuguesa LTC – Livros Técnicos e Científicos Editora S.A., Brasil, 1992.
[15] Alves, L. L., “Apontamentos curso Termodinâmica e Estrutura da Matéria”, Instituto
Superior Técnico, 2006.
[16] “Magnetic Drive Gear Pumps Ensure Maximum Heat Transfer Efficiency in High Density
Microelectronics Packaging”, MICROPUMP Inc©.
86
[17] Lasance, C. J. M., Simons, R. E., “Advances in High-Performance Cooling for Electronics”,
Electronics Cooling, vol. 11, n. 4, Novembro 2005 (disponível em http://www.electronics-
cooling.com/articles/2005/2005_nov_article2.php).
[18] Panão, M. R. O., Moreira, A. L. N., “Intermittent Spray Cooling: towards a new
technological concept”, 6th International Conference on Multiphase Flow (ICMF 2007),
Alemanha, 2007.
[19] Panão, M. R. O., Moreira, A. L. N., “Intermittent Spray Cooling: a new technology for
controlling surface temperature”, Submetido ao International Journal of Heat and Fluid
Flow, 2008.
[20] Shedd, T. A., “Next Generation Spray Cooling: High Heat Flux Management in Compact
Spaces”, Heat Transfer Engineering, vol. 28, n. 2, pp 87-92, 2007.
[21] Bash, C. E., Patel, C. D., Sharma, R. K., “Inkjet assisted spray cooling of electronics”,
Proceedings of International Electronic Packaging Technical Conference and Exhibition,
EUA, Julho 2003.
[22] Mudawar, I., Estes, K. A., “Optimizing and Predicting CHF in Spray Cooling of a Square
Surface”, Journal of Heat Transfer, vol. 18, n. 3, pp 672-679, 1996.
[23] Moita, A. S., Moreira, A. L. N., “Drop impacts onto cold and heated rigid surfaces:
Morphological comparisons, disintegration limits and secondary atomization”, International
Journal of Heat and Fluid Flow, vol. 28, pp. 735-752, 2007.
[24] Moita, A. S., Moreira, Al. L. N., “Thermal induced atomization and heat transfer in drop
impacts against surface enhanced heated targets”, Proceedings of the 21st ILASS –
Europe Meeting, 2007.
[25] Moita, A. S., Moreira, A. L. N., “Characterization of hydrodynamics and heat-transfer
processes of drop impacts against surface enhanced heated targets as an application to
microelectromechanical cooling devices”, 6th International Conference on Multiphase Flow
(ICMF 2007), Alemanha, 2007.
[26] Isci, C., Martonosi, M., “Runtime Power Monitoring in High-End Processors: Methodology
and Empirical Data”, Proceedings of 36th Annual IEEE/ACM International Symposium on
Microarchitecture (MICRO-36), pp 93 – 104, Dezembro 2003.
[27] Sarmento, Helena, “Acetatos Electrónica das Interfaces 2003/2004”, Instituto Superior
Técnico, 2003/2004 (disponível em http://fenix.ist.utl.pt/disciplinas/elin/2003-2004/2-
semestre).
[28] Panão, M.R.O, Moreira, A.L.N, “Thermo and fluid dynamics characterization of spray
cooling with pulsed sprays”, Experimental Thermal and Fluid Science, vol. 30, pp. 79-96,
2005.
[29] Informação disponível em:
http://www.coleparmer.com/catalog/product_index.asp?cls=6816.
[30] Bonner III, R. W., Wadell, R. P., Popov, G., “Local Heat Transfer Coefficient
Measurements of Flat Angled Sprays Using Thermal Test Vehicle”, 24th Annual IEEE

87
Semiconductor Thermal Measurement and Management Symposium, pp. 149-153, Março
2008.
[31] Moreira, A. L. N., Carvalho, J., Panão, M. R. O., “An experimental methodology to quantify
the spray cooling event at intermittent spray impact”, International Journal of Heat and
Fluid Flow, vol. 28, pp 191- 202, 2007.
[32] Alliance for Telecommunications Industry Solutions (informação disponível em
http://www.atis.org/glossary).
[33] “Intel® Pentium® 4 Processor in the 423-pin Package at 1.30, 1.40, 1.50, 1.60, 1.70, 1.80,
1.90 and 2 GHz”, Intel®, Agosto 2001 (disponível em
http://download.intel.com/design/Pentium4/datashts/24919805.pdf).
[34] “NPN Silicon Darlington Transistors”, Siemens.
[35] Silva, M. M., “Circuitos com Transístores Bipolares e MOS”, Fundação Calouste
Gulbenkian, 2ª edição, 2003.
[36] “PIC18F8722 Family Data Sheet”, Microchip Technology Inc.©, 2004 (disponível em
http://ww1.microchip.com/downloads/en/DeviceDoc/39646b.pdf).
[37] “Tiny Serial Digital Thermal Sensor”, Microchip Technology Inc.©, 2002 (disponível em
http://ww1.microchip.com/downloads/en/DeviceDoc/21462c.pdf).
[38] Almeida, C. M. R., “Redes para Sistemas Embebidos: I2C, SPI”, Sistemas Computacionais
– Instituto Superior Técnico, 2006/2007 (disponível em http://comp.ist.utl.pt/ec-
sc/0607/acetatos/).
[39] Vu, H., Franco, W., Jia, W., Aguilar, G., “Hypobaric pressure effects on R-134a cooling
sprays for laser dermatology”, ICLASS-2006, Japão, 2006.
[40] Informação disponível em http://www.3m.com/.
[41] Lide, D. R., “CRC Handbook of Chemistry and Physics”, 85ª edição, 2004-2005.
[42] “NEC Develops World's First Water-Cooling Module with Piezoelectric Pump for Notebook
PC”, NEC Corporation, Junho 2003 (disponível em
http://www.nec.co.jp/press/en/0306/3001.html).
[43] Zhang, H. Y., Pinjala, D., Teo, P., “Thermal management of high power dissipation
electronic packages: from Air Cooling to Liquid Cooling”, 5th Electronics Packaging
Technology Conference 2003 (EPTC 2003), pp. 620-625, Dezembro 2003.
[44] Moreira, A. L. N., Moita, A. S., Cossali, E., Marengo, M., Santini, M., “Secondary
atomization of water and isooctane drops impinging on tilted heated surfaces”, Exp. Fluids,
vol. 43, pp 297-313, 2007.
[45] Moran, M. J., Shapiro, H. N., “Fundamentals of Engineering Thermodynamics – SI
Version”, 3ª edição, John Wiley & Sons, Inglaterra, 1998.
[46] Holman, J. P., “Heat Transfer”, 4ª edição, McRAW-HILL, Japão, 1976.

88
ANEXO 1 – Conceitos Termodinâmicos, Transferência de
Massa e de Calor
O presente anexo pretende contextualizar alguns dos conceitos termodinâmicos e de transferência
de massa e calor abordados na presente tese.
É necessário começar por definir o conceito de sistema que, de acordo com [45], é o conteúdo
material que se pretende estudar. Todo o conteúdo exterior ao sistema é considerado como
envolvente, sendo o sistema distinguido da envolvente através da sua fronteira [45]. Uma correcta
definição de fronteira é importante dado que esta é um elemento fundamental nas trocas entre o
sistema e a envolvente. Os sistemas podem ser classificados como sistemas fechados ou abertos
(volumes de controlo) [45]. O sistema fechado contém sempre o mesmo tipo de conteúdo, não
podendo existir transferência de massa através da fronteira [45]. Existe um caso particular de sistema
fechado, denominado sistema isolado, onde não existe qualquer tipo de interacção com a envolvente
[45]. Em alguns casos, o sistema pode ser subdivido em regiões, denominadas volume de controlo,
que apresentam fronteiras próprias entre as quais podem ocorrer trocas de matéria e/ou energia [45].
Para a termodinâmica clássica o conceito de equilíbrio é fundamental visto o principal ênfase ser
dado aos estados de equilíbrio e à transição entre eles [45]. Assim sendo, um sistema em equilíbrio
termodinâmico é aquele que se encontra num estado estacionário com uma distribuição uniforme dos
parâmetros, i.e., quando o sistema, isolado da sua envolvente, não apresenta alterações nas
propriedades (o que indica que estas já se encontravam num estado estacionário) [45]. Pode ainda
definir-se equilíbrio térmico resultante da interacção entre dois sistemas em contacto e isolados da
envolvente. Este equilíbrio é atingido quando ambos estabilizam à mesma temperatura [45]. Neste
contexto, existem materiais termicamente isolantes capazes de evitar esta interacção, denominados
de parede adiabática, dando-se o nome de processo adiabático ao processo que envolve uma parede
adiabática [45]. Num processo adiabático não ocorre transferência de calor, embora não seja
necessariamente um processo a temperatura constante.
Outro conceito fundamental na análise de sistemas termodinâmicos é o conceito de Calor,
representado por Q. Este aplica-se à quantidade de energia transferida, numa interacção de calor,
pela fronteira de um sistema com a sua envolvente [45]. Considera-se que o calor é positivo (Q>0)
quando a transferência de calor é feita para o sistema, sendo negativo (Q<0) em caso contrário [45].
No caso do processo ser adiabático, não existindo interacção térmica entre sistemas, não há
transferência de energia por calor. O valor da transferência de calor depende do processo em si e
não apenas dos estados finais atingidos, pelo que Q não é uma propriedade do sistema. A energia
transferida por calor corresponde ao integral, ao longo da mudança do estado 1 para o 2, da forma
diferencial δQ (Eq. A1) [45].
Deve ainda referir-se que a variação de temperatura corresponde a uma transferência de calor
mas que o contrário não é verdadeiro [15]. Desta forma, pode-se transferir calor de, ou para, um
sistema sem que a sua temperatura se altere, sendo disso exemplo a energia libertada (ou recebida)

89
pelo sistema ao ser utilizada na regeneração (ou destruição) de ligações químicas, dando origem a
uma mudança de estado [15].
∫∂=
2
1
QQ (Eq. A 1)
Defina-se agora .
Q como sendo a taxa de transferência de calor, que corresponde ao integral do
fluxo de calor, .
q , na área A da fronteira do sistema onde ocorre a transferência de calor (Eq. A2)
[45].
∫=A
dAqQ..
(Eq. A 2)
O conceito de fluxo de calor aplica-se à taxa de transferência de calor por unidade de área do
sistema, sendo expresso em W/m2 [45]. É agora possível calcular a quantidade de calor transferida
durante um período de tempo, calculando o integral da taxa de transferência de calor durante esse
período (Eq. A3) [45].
∫=2
1
.t
t
dtQQ (Eq. A 3)
Existem três mecanismos básicos de transferência de calor, nomeadamente: condução,
convecção e radiação térmica.
No caso da condução, esta pode ocorrem em sólidos, líquidos ou gases, e corresponde à
transferência de energia devido à interacção entre partículas da mesma substância, ocorrendo esta
transferência de partículas mais energéticas para partículas adjacentes de menor energia [45].
O fenómeno de transporte de energia por condução decorre então da transferência de energia
associada às colisões entre as partículas constituintes de um material com diferentes gradientes de
temperatura [15]. No caso dos sólidos, a energia pode ser conduzida quer por transporte por
electrões livres, quer pela estrutura do material [46]. Para os bons condutores eléctricos, como por
exemplo os metais (e.g. cobre – material usual nos sistemas de convecção a ar), existe um elevado
número de electrões livres a circular na estrutura do material, transportando consigo cargas eléctricas
e energia de uma região com uma determinada temperatura para outra com uma temperatura inferior.
Devido a este fenómeno, os electrões são por vezes denominados de electron gás, visto que a
transferência de energia se processa de forma análoga à dos gases [46].
Neste contexto, surge a Lei de Fourier (1815) [15], que permite calcular a quantidade de energia
transferida por unidade de tempo [14]. Esta lei não foi deduzida a partir dos princípios fundamentais
mas foi antes desenvolvida a partir da observação de fenómenos, razão pela qual é designada como
sendo uma lei fenomenológica [14]. Desta forma, considere-se uma parede plana unidimensional com
distribuição de temperatura T(x) (Figura A 1). O conceito de fluxo de calor, descrito como a taxa de
transferência de calor por unidade de área perpendicular à direcção de transferência e proporcional
ao gradiente de temperatura nesse sentido (dT/dx) pode agora ser calculado pela Lei de Fourier (Eq.

90
A4) [14]. A constante k representa a condutividade térmica e é uma propriedade do próprio material,
sendo expressa em W/[m.K] [14]. O sinal negativo na Eq. A4 representa o facto de o calor se
transmitir na direcção da temperatura decrescente [14]. Considerando as condições da Figura A 1 e
considerando uma distribuição de temperatura linear, a Eq. A4 pode ser rescrita na forma
apresentada na Eq. A5.
dx
dTkq −=
.
(Eq. A 4)
L
Tk
L
TTkq
∆=
−= 21
.
(Eq. A 5)
T1
T2
T(x)
T
x
L
Figura A 1 – Transferência de calor por condução numa parede plana unidimensional com uma
distribuição de temperatura T(x).
Considere-se agora uma barra cilíndrica, feita de material conhecido, cuja face cilíndrica se
encontra isolada e as faces terminais (Face 1 e Face 2) são mantidas a uma determinada
temperatura T, que difere entre si (T1 > T2). Ao haver uma variação de temperatura vai existir uma
transferência de calor da face 1 (T1) para a face 2 (T2), sendo possível determinar a taxa de
transferência de calor relacionando a área das faces (A) com a relação entre a diferença de
temperaturas, o comprimento da barra (L) e a condutividade térmica do material. No entanto,
recordando a relação obtida para o fluxo de calor obtida na Eq. A4, a taxa de transferência de calor
pode ser relacionada com o fluxo de calor pela Eq. A6 [14]. Novamente neste caso o sinal negativo é
necessário devido ao facto de o calor se transferir sempre nas direcção das temperaturas
decrescentes.
..
qAQ −= (Eq. A 6)
Nas várias relações enunciadas, a propriedade de condutividade térmica surge diversas vezes,
influenciando o fluxo térmico de condução na medida que este aumenta com o aumento da
condutividade térmica [14]. Esta propriedade é própria de cada material sendo, em geral, maior para
o caso dos sólidos relativamente a líquidos, que por sua vez, apresentam valores mais elevados do
que os gases [14]. Esta diferença nos valores de k está associada às diferenças verificadas ao nível
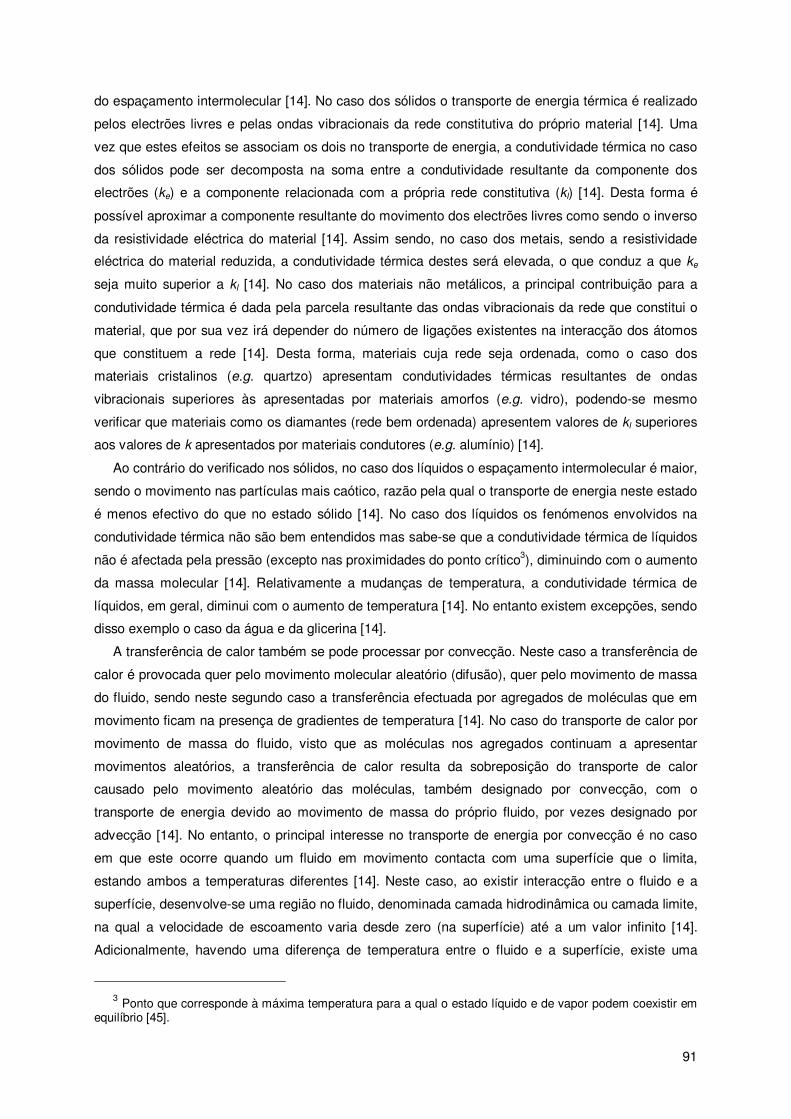
91
do espaçamento intermolecular [14]. No caso dos sólidos o transporte de energia térmica é realizado
pelos electrões livres e pelas ondas vibracionais da rede constitutiva do próprio material [14]. Uma
vez que estes efeitos se associam os dois no transporte de energia, a condutividade térmica no caso
dos sólidos pode ser decomposta na soma entre a condutividade resultante da componente dos
electrões (ke) e a componente relacionada com a própria rede constitutiva (kl) [14]. Desta forma é
possível aproximar a componente resultante do movimento dos electrões livres como sendo o inverso
da resistividade eléctrica do material [14]. Assim sendo, no caso dos metais, sendo a resistividade
eléctrica do material reduzida, a condutividade térmica destes será elevada, o que conduz a que ke
seja muito superior a kl [14]. No caso dos materiais não metálicos, a principal contribuição para a
condutividade térmica é dada pela parcela resultante das ondas vibracionais da rede que constitui o
material, que por sua vez irá depender do número de ligações existentes na interacção dos átomos
que constituem a rede [14]. Desta forma, materiais cuja rede seja ordenada, como o caso dos
materiais cristalinos (e.g. quartzo) apresentam condutividades térmicas resultantes de ondas
vibracionais superiores às apresentadas por materiais amorfos (e.g. vidro), podendo-se mesmo
verificar que materiais como os diamantes (rede bem ordenada) apresentem valores de kl superiores
aos valores de k apresentados por materiais condutores (e.g. alumínio) [14].
Ao contrário do verificado nos sólidos, no caso dos líquidos o espaçamento intermolecular é maior,
sendo o movimento nas partículas mais caótico, razão pela qual o transporte de energia neste estado
é menos efectivo do que no estado sólido [14]. No caso dos líquidos os fenómenos envolvidos na
condutividade térmica não são bem entendidos mas sabe-se que a condutividade térmica de líquidos
não é afectada pela pressão (excepto nas proximidades do ponto crítico3), diminuindo com o aumento
da massa molecular [14]. Relativamente a mudanças de temperatura, a condutividade térmica de
líquidos, em geral, diminui com o aumento de temperatura [14]. No entanto existem excepções, sendo
disso exemplo o caso da água e da glicerina [14].
A transferência de calor também se pode processar por convecção. Neste caso a transferência de
calor é provocada quer pelo movimento molecular aleatório (difusão), quer pelo movimento de massa
do fluido, sendo neste segundo caso a transferência efectuada por agregados de moléculas que em
movimento ficam na presença de gradientes de temperatura [14]. No caso do transporte de calor por
movimento de massa do fluido, visto que as moléculas nos agregados continuam a apresentar
movimentos aleatórios, a transferência de calor resulta da sobreposição do transporte de calor
causado pelo movimento aleatório das moléculas, também designado por convecção, com o
transporte de energia devido ao movimento de massa do próprio fluido, por vezes designado por
advecção [14]. No entanto, o principal interesse no transporte de energia por convecção é no caso
em que este ocorre quando um fluido em movimento contacta com uma superfície que o limita,
estando ambos a temperaturas diferentes [14]. Neste caso, ao existir interacção entre o fluido e a
superfície, desenvolve-se uma região no fluido, denominada camada hidrodinâmica ou camada limite,
na qual a velocidade de escoamento varia desde zero (na superfície) até a um valor infinito [14].
Adicionalmente, havendo uma diferença de temperatura entre o fluido e a superfície, existe uma
3 Ponto que corresponde à máxima temperatura para a qual o estado líquido e de vapor podem coexistir em
equilíbrio [45].

92
região no fluido, denominada camada limite térmica, através da qual a temperatura varia desde TS, na
superfície, até T∞, na região externa [14]. Desta forma, se TS > T∞, existe uma transferência de calor
por convecção, da superfície para o escoamento externo, transferência esta realizada quer pelo
movimento molecular aleatório, quer pelo movimento macroscópico do fluido no interior da camada
limite [14]. Na vizinhança da superfície é o movimento molecular aleatório (difusão) que domina o
processo de transferência de calor, sendo que na interface entre a superfície e o fluido, devido ao
facto da velocidade do fluido ser nula (condição de não-escorregamento), apenas existe transferência
de calor por movimento molecular [14]. É ainda importante realçar que a camada limite térmica não
tem de ter a mesma dimensão que a camada hidrodinâmica [14].
A transferência de calor por convecção pode ser classificada de acordo com a natureza do
escoamento [14], podendo ser forçada, nos casos em que o escoamento é provocado por meios
externos (e.g. arrefecimento convectivo a ar), ou livre (ou natural) quando o escoamento é provocado
pelas forças que se originam nas diferenças de densidade provocadas pelas variações de
temperatura no fluido [14]. A descrição apresentada de convecção aplica-se tipicamente à energia
sensível ou interna do fluido [14]. No entanto, há processos convectivos nos quais existe troca de
calor latente, troca esta normalmente associada à mudança de fase entre os estados líquido e gasoso
[14]. Independentemente da natureza do processo de transferência de calor por convecção, é sempre
possível encontrar uma relação entre a diferença de temperaturas da superfície e do fluido (Eq. A7)
[14]. A esta relação dá-se o nome de fluxo de calor convectivo, também representado por .
q , sendo
expressa em W/m2 [14]. A mesma expressão é também por vezes denominada por Lei de Newton do
arrefecimento [14]. Ao utilizar esta expressão, o fluxo convectivo será positivo se o calor for
transferido da superfície (TS > T∞), sendo negativo caso contrário (TS < T∞) [14]. Na Eq. A7 a
constante de proporcionalidade h representa o coeficiente de transferência convectiva de calor, sendo
expresso por W/[m2.K] [14]. Esta constante contém todos os parâmetros que influenciam a
transferência de calor por convecção e depende das condições de camada limite que, por sua vez,
dependem da geometria da superfície, da natureza do movimento do fluido, dependendo ainda de um
conjunto de propriedades termodinâmicas e de transporte do fluido [14].
( )∞−= TThq S
.
(Eq. A 7)
Retome-se agora o conceito de resistências térmicas já apresentado na introdução do presente
documento. A resistência térmica surge da analogia entre a difusão de calor e a condução de
corrente eléctrica [14]. Usando a definição de resistência como sendo a razão entre potencial motriz e
taxa de transferência que este provoca, e aplicando essa mesma definição ao caso da condução de
calor, recordando as Eq. A5 e Eq. A6, é possível obter a relação presente na Eq. A8 [14]. É
necessário referir que o sinal negativo presente na Eq. A6 é anulado pelo facto de se trocar o sentido
das temperaturas (continuando no entanto a ter T1 > T2). De forma análoga, recorrendo à Lei de
Newton para a convecção, é possível obter a Eq. A9, correspondente à resistência térmica de
convecção [14].

93
Relativamente à resistência térmica de condução e convecção verifica-se, em geral, que em meios
líquidos e gasosos, RTconv. é consideravelmente menor que a RTcond., denunciando um domínio da
convecção térmica [15].
kA
L
Q
TTR
condT =−
=.
12
. (Eq. A 8)
hAqA
TTR S
Tconv
1..
=−
= ∞ (Eq. A 9)
Tal como já apresentado na introdução, existe ainda a Resistência térmica de Contacto [14] que
se deve principalmente à existência de rugosidades na superfície que conduzem ao aparecimento de
pontos de contacto mas também de vazios que, na maioria dos casos, estão cheios de ar [14]. Neste
caso a transferência de calor passa a ser feita não só por condução, nos pontos de contacto, mas
também por convecção na zona dos vazios [14]. Desta forma, a resistência de contacto equivale ao
paralelo da resistência nos pontos de contacto com a resistência nos vazios [14]. Uma vez que,
habitualmente, os pontos de contacto têm uma área pequena, a principal contribuição para a
resistência total é a dada pela resistência dos pontos vazios [14]. Uma solução possível para diminuir
a resistência de contacto é a escolha de um fluido cuja condutividade térmica seja superior à do
material utilizado nos pontos de contacto [14], sendo esta uma das razões para a aplicação de pastas
térmicas entre os dissipadores dos processadores e os sistemas de arrefecimento por contacto
indirecto.
Por fim, considerem-se as mudanças de estados. Comece-se por uma substância pura e
compressível. Experimentalmente é possível considerar temperatura e volume específico de forma
independente, determinando a pressão como função destas duas propriedades, p = p (T,ν), sendo
que o gráfico que resulta desta função é uma superfície conhecida como superfície p-ν-T [45]. Neste
tipo de gráficos existem três zonas distintas: sólido, líquido e vapor [45]. Nestas regiões o estado da
substância é fixado por qualquer de duas das seguintes propriedades: pressão, temperatura ou
volume específico [45]. O gráfico resultante da superfície p-ν-T pode ser projectado sobre o plano
pressão-temperatura, dando origem ao denominado diagrama de fase (Figura A 2) [45].
Neste gráfico as linhas representam zonas em que a substância se encontra em duas fases (ou
estados) [45]. Desta forma, a linha que separa o estado sólido do vapor é denominada curva de
sublimação, a curva que separa o estado líquido do vapor é a curva de saturação e a curva que
separa o estado líquido do sólido é a curva de fusão [15]. Também na figura existe um ponto
designado por ponto triplo, sendo que neste ponto os três estados coexistem ao mesmo tempo [15,
45]. Existe ainda um segundo ponto denominado ponto crítico, definido pela temperatura e pressão
crítica, que corresponde à máxima temperatura para a qual o estado líquido e de vapor podem
coexistir em equilíbrio [45]. Desta forma, a partir do ponto crítico deixa de haver uma diferença nítida
entre os estados líquido e de vapor [15].

94
T
p
Ponto Crítico
Ponto Triplo
Sólido
Líquido
Vapor
Figura A 2 – Diagrama de fase para um sistema genérico, [15, 45].
Relativamente à curva que separa os estados líquido e de vapor é possível referir que, devido à
elevada energia interna do estado de vapor relativamente ao estado líquido quando comparado para
uma mesma substância e temperatura, a evaporação de uma substância (desde que em condições
afastadas do ponto crítico) permite, de uma forma geral, uma absorção substancial de calor [6], pelo
que uma rápida evaporação facilita a transferência de calor da superfície para o líquido [6]. Também
se pode definir temperatura de saturação como a temperatura à qual a substância muda de fase,
sendo a pressão correspondente denominada por pressão de saturação [45].
À medida que uma substância pura é aquecida, a uma pressão constante, a temperatura aumenta
consideravelmente sendo acompanhada por um aumento, moderado, de volume [45]. Este fenómeno
continua até se atingir o ponto de saturação [45]. Quando a substância atinge o ponto de saturação, o
aumento da transferência de calor, para uma pressão constante, provoca a formação de vapor, não
existindo no entanto alteração na temperatura mas sim no volume [45]. Nesta ponto o sistema entra
num estado de duas fases (líquido-vapor) no qual o aumento contínuo da transferência de calor irá
conduzir à vaporização de todo o líquido passando a existir apenas vapor [45]. Existe uma razão que
possibilita a comparação de qualidade entre diversas misturas líquido-vapor, sendo que a quantidade
de massa de vapor relativamente à massa total da mistura traduz a qualidade da mistura (Eq. A10)
[45]. A razão varia entre zero (estado líquido) e a unidade (estado de vapor) [45].
líquidovapor
vapor
mm
mqualidade
+= (Eq. A 10)

95
ANEXO 2 – Programação Microcontrolador: Fluxogramas
Os fluxogramas apresentados serão apenas referentes a funções com particular importância no
contexto do programa ou cujo algoritmo de programação contenha particularidades. No entanto, estes
fluxogramas são apenas ilustrativos, não sendo uma reprodução integral das rotinas do programa.
Em diversas situações são feitas verificações de erros. No entanto apenas será feita referência a
esta verificação quando necessário para entender o fluxograma.
Rotina Main do Programa
Chamar rotina inicialização do Sistema
Início
Interrupçãotimer?
Chamar rotina para actualização da flag de eventos temporizados e carregar timer
Flag eventostemporizados
Converter Temperatura
Comparar com Temperatura Máxima
Chamar rotina de controlo de testes
Dados aenviar?
Chamar rotina de envio RS-232
Chamar rotina de leds para acender/apagar sequencialmente
Flag de testeTerminado?
Chamar rotina de Reset do sistema
Limpar flag de eventos temporizados
while(1)
s
1
n
0
sn
sn
Rotina para testes de Perfil de Potência
Início
Final
Tempo =
Entrada Perfil?
Leitura Variávelnível depotênciaperfil
Actualizar controlo
de potência
sn

96
Rotina para testes de Temperatura Constante
Termopar 1
Identificar termopar
de referência
Início
Termopar 2
Nível de potência 30 W
Termopar 3
Início de
teste?Tref > 50ºC
Nível de potência 15 W
Diminuir um nívelde potência
T > Tref
Potência > 0
Manter nívelpotência
T = Tref
Aumentarum nível
de potência
Potência<Max
Actualizar controlo de Potência
Final
sn
snsn
sn
sn
T < Tref
sn
Rotina para testes de Potência Constante
O fluxograma apresentado apenas pretende demonstrar que esta rotina simplesmente chama a
função que controla os portos de saída do microcontrolador visto que o valor de potência a colocar
já se encontra configurado desde a recepção do pedido para este tipo de teste.
Manter valorpotência
Início
Actualizar controlo de Potência
Final

97
Rotina de controlo dos testes em execução
Esta rotina é chamada pela rotina main e é responsável por verificar que tipo de teste se está a
realizar e tomar as medidas necessárias para garantir a execução do teste e preparação dos
dados a enviar para o computador.
Potência constante
Identificar tipo deteste pela variável de modo
Início
Tempo=
Duração de Teste?
Criar mensagem para enviar ao computador:Ok - Horas, Minutos, Segundos – Temperaturas Termopares - Duração programada de teste - Temperatura Ambiente
Final
Temperaturaconstante
Perfil de Potência
Desactivar saídas
de potência
Modo de Teste normal
Colocar código de final de comunicação
Colocar código de final de linha de dados
Actualizar Flag paraenvio de dados
sn

98
ANEXO 3 – Programação Interface: Fluxogramas
Tal como no Anexo 2, apenas serão apresentados alguns fluxogramas referentes a funções com
importância no contexto do programa de interface ou cujo algoritmo de programação contenha
particularidades. No entanto, os fluxogramas apresentados são apenas ilustrativos, não sendo uma
reprodução integral das rotinas do programa.
Em diversas situações são feitas verificações de erros mas apenas será feita referência a esta
verificação quando necessário para entender o fluxograma.
Rotina de configuração porta Série (RS-232)
Início
Handler válido?
Recolha do númerode porta
Série a iniciar
Abertura da Porta(CreateFile)
Erro Adquirir informação da porta(GetCommState)
Configurar Porta
Actualizar com os novosdados para Porta Série(SetCommState)
Configurar novos Timeouts
Adquirir informação sobre Timeout(GetCommTimeouts)
Actualizar com os novosTimeouts
(SetCommTimeouts)
Final
sn

99
Rotina de escrita na porta Série (RS-232)
Início
Bytes enviados <Total
a enviar
Enviar Bytes(WriteFile)
Final
Retornar número de Bytes Enviados
IncrementarBytes enviados
sn
Rotina de leitura na porta Série (RS-232)
Início
Recolha de bytes até detectar código de início de comunicação
Erro
Final
2 bytes seguintessão o comando pedido e OK?
Recebe dados até final delinha ou comunicação
Comando de Pedidode Temperatura
Ambiente?
Recebe TemperaturaRecebe dados enviadospelo microcontrolador
Converte tensões em Temperaturas
Apresenta no monitor a informação e guarda os dados
no ficheiro de resultados
Comando Perfil de Potência?
Enviar nova entrada?
Notificar Programa deSimulação
sn
sn
sn
s
n
Final dacomunicação?
sn

100
Rotina de configuração de testes com Potência Constante
Início
Potênciadentro
dos limites?
Final
Calcular nível de potência para o valor inserido
Chamar função paracriar ficheiro de Resultados
Recolher Valor potência
Erro
Recolher valor duraçãoteste
Valor dentrodos limites?
Erro Criar cabeçalho no ficheiro de Resultados
Valor da HumidadeRelativa?
Criar Pedido a enviar
Chamar função de escrita na porta RS-232
Chamar função de leitura de dados da porta RS-232que termina no final dos dados todos recebidos
Encerrar ficheiro de Resultados
Ver Resultados?
Abrir FicheiroRecolher Valor
sn
sn
sn
sn
Rotina de configuração de testes com Temperatura Constante
Início
Valordentro dos limites?
Chamar função paracriar ficheiro de Resultados
Recolher valor Temperaturaa atingir
Erro
sn
Recolher Termopar de Referência
Valordentro dos limites?
Erro
sn
Recolher Duração doTeste
Valordentro dos limites?
Erro
sn
Criar Pedido de Temperatura Ambiente
Criar cabeçalho noficheiro de Resultados
Valor da HumidadeRelativa?
Recolher Valor
sn
Chamar função de escrita na porta RS-232
Chamar função de leitura de dados da porta RS-232
Valor adquirido?
Erro
sn
Identificar ganho do termopar e usar polinómio inversopara cálculo da Tensão correspondente à temperatura a alcançar
Criar Pedido a enviar
Chamar função de escrita na porta RS-232
Chamar função de leitura de dados da porta RS-232que termina no final de todos os dados recebidos
Final
Encerrar ficheiro de Resultados
Ver Resultados?
Abrir Ficheiro
sn

101
Rotina de configuração de testes com Perfil de Potência
Início
Chamar função paracriar ficheiro de Resultados
Todos osdados
Analisados?
sn
Valordentro dos limites?
Erro
sn
Acrescentar dadosao vector de perfil
Chamar função paraabrir ficheiro de Perfil
AtingidoFinal
Ficheiro?
sn
Recolher dados semcomentários
Recolher próxima entrada perfil
Criar Pedido aenviar ao computador
Chamar função de escrita na porta RS-232
Chamar função de leitura de dados da porta RS-232que termina no final ou caso seja necessário enviar uma nova entrada de perfil
Valor da HumidadeRelativa?
sn
Enviarnova entrada
Perfil?
sn
Final
Final do testeEncerrar ficheiro de Resultados
Ver Resultados?
Abrir Ficheiro
snRecolher Valor
Criar cabeçalho noficheiro de Resultados
Rotina Main do programa de interface
A rotina main simplesmente inicia o programa de interface, passando depois o controlo do
programa para os menus e restantes funções, sendo a terminação do programa controlada por
estes.
Chamar menu comapresentação do
programa
Início
Chamar rotina inicialização porta
RS-232
Final
Chamar menu inicial
Na realidade nunca atinge este ponto porque o
programa termina através dos menus

102
ANEXO 4 – Artigo para apresentação oral na 22nd European
Conference on Liquid Atomization and Spray Systems.
De seguida será apresentada uma cópia do artigo submetido e aceite para apresentação oral na
22nd European Conference on Liquid Atomization and Spray Systems.
O artigo apresentado foi publicado nos Proceedings of the 22nd European Conference on Liquid
Atomization and Spray Systems (ISBN 978-88-903712-0-2).
Sendo uma cópia integral da versão enviada, o formato apresentado difere da formatação da
presente tese. No entanto optou-se por apresentar uma cópia da versão final aceite para publicação.
Mais informação poderá ser encontrada no site oficial: http://www.ilasseurope2008.org/.
NOTA ADICIONAL (ERRATA)
Ao longo do artigo apresentado, onde se apresenta “fluid consumption” como sendo uma
vantagem do duty cycle na gama óptima, deveria ler-se “reduction in the fluid consumption”,
indicando desta forma uma das vantagens do uso de sprays intermitentes relativamente a uma
melhoria em termos de gestão de líquido face a sprays contínuos.
Adicionalmente, na Figura 1 do artigo, onde se apresenta “K type Thermocuples”, deveria ser
apresentado “K type Thermocouples”.

ILASS 2008 Sep. 8-10, 2008, Como Lake, Italy
Paper ID ILASS08-A035
INTRODUCTION
Personal Computers’ processors have registered, in the past years, a considerable evolution. In 1965, the Intel
® co-founder
Gordon Moore predicted that the number of transistors on a chip would double about every two years and, in fact, the evolution of Intel’s
® processors, over the past 40 years,
respected this prevision [1]. The innovations and technological advances in computer design [2] allowed to achieve faster processors, registering improvement rates of performance of the order of 35% per year [2], with the reduction of packaging size [3], bringing new challenges in terms of Thermal and Power Management. Power is an important issue for modern CMOS processors, since the energy required to function the transistor is proportional to a number of factors, including the frequency of switching [2]. But, as the working frequency increases and the dimensions of the chip decreases, the transistor leakage current increases, leading to excess power consumption and heat generation [4]. Hennessy and Patterson [2] referred that thermal management would be, in the short term, one of the majors limitations to the development of faster processors. Bar-Cohen et al. [3] refer that the rise in chip power dissipation and heat fluxes, with roadmap projections of average chip heat fluxes exceeding 150 W/cm
2 and the emergence of on-chip hot spots,
with heat fluxes approaching 1 kW/cm2, can degrade the
processor performance and reliability. As an example, Paik et al. [5] argue that an increase of just 15ºC in the temperature can affect timing at the same time that the on-chip thermal variation reduces reliability. Given this scenario and taking into account that according to International Technology Roadmap for Semiconductors (ITRS) [5], the power consumption of high-performance desktops will jump from 147W to 288W in 2016, the development of new and more effective cooling methods is an emergent need. As stated by Cader et al. [6], conventional air-cooling solutions are struggling to cope with the increase in clock frequency and in
the number of gates, which reinforces the call for alternative cooling technologies. In line with this, Shedd [7] refers that spray cooling allows reaching heat transfer coefficients of about 10000 Wm
-2K-1
with the use of refrigerants. In this context, spray impingement has the potential for further miniaturization of the packed device, since spraying directly onto the processor die with a dielectric coolant allows removing the contact resistance between the die and the thermal dissipater. Also, one can expect significant enhancements in the performance of the cooling device with the use of two-phase boiling flows.
However, fluid management is the main limitation to the development of this technology (e.g., Shedd [7]). In this context, Intermittent Spray Cooling System (ISCS) appears as a new technological concept for two-phase cooling, which provides better performance and control over heat transfer mechanisms such as thin film boiling, e. g., Panão and Moreira [8, 9]. One of the advantages of using an intermittent spray is the ability to control the amount of liquid injected by proper matching the frequency of injection and pulse duration through the duty cycle. Nevertheless, most of those studies addressed the physical fundamentals behind heat, the heat transfer process and, although experimental, were performed at static boundary conditions, which do not entirely reproduce the dynamic behaviour of real processors. Only a few studies are based on dynamic arrangements. For instance, Cader et al. [6] addressed the ability of spray cooling to handle transient die power dissipation and its effects on device reliability using a bare die thermal system and a dual Opteron CompactPCI single board computer. In this context, the present paper reports on the assessment of a test bed built to assist computer product designers and manufacturers to develop new cooling systems and compare diverse cooling technologies based on real dynamic conditions. With this objective in mind, the test bed was designed to reproduce the dynamic behaviour of a real processor so to allow to characterize the design parameters of
DIRECT-CONTACT-INTERMITTENT-SPRAY-COOLING FOR
THERMAL MANAGEMENT OF A COMPUTER PROCESSOR
Tiago H. Moita1,*
, Marcelino B. dos Santos2 and António L. N. Moreira
3
Technical University of Lisbon - Instituto Superior Técnico, Lisbon, PORTUGAL 1 Dep. of Electrical and Computer Engineering, Lab. of Thermofluids, Combustion and Energy Systems, IN+
2 Dep. of Electrical and Computer Engineering, INESC-ID
3 Dep. of Mechanical Engineering, Lab. of Thermofluids, Combustion and Energy Systems, IN+
*Corresponding author: [email protected], http://ltces.dem.ist.utl.pt/
ABSTRACT The present paper reports on the assessment of a test bed built to assist computer product designers and manufacturers to optimize the design parameters of new developed cooling systems based on Direct-Contact-Intermittent-Spray-Cooling. A test bed was designed and built, which has the ability to reproduce programmed power profiles, as measured in benchmarks and desktop applications for a real processor. The results evidence that the duty cycle is the main operational parameter to consider in the control of the cooling system for dynamic boundary conditions, thus confirming the major conclusions reported in previous studies performed with a static test bed. There is an optimal range for the duty cycle, between 50% and 60%, above which there are no significant improvements in the cooling performance, due to the formation of a thick liquid film which mitigates an efficient heat removal by phase change. Based on the thermal behaviour of this test bed one should recommend that it can be more advantageous and safe, in a real system, to work with such mid term duty cycle, than trying to alter the operation conditions between smaller and higher duty cycles, for fluid management. The position of the test bed also has an important role: the system should work horizontally.
Paper ID ILASS08-13-11
1

Direct-Contact-Intermittent-Spray-Cooling systems applied to a computer processor.
EXPERIMENTAL APPARATUS
In a real processor, power dissipation varies considerably at a rate which depends on the programs currently being executed. A variation of 50W on an application-by-application basis is usual in today’s processors, so that power dissipation of real running systems has become crucial for hardware and software system research and design [10]. Given that, the present work focuses on the analysis of the application of cooling systems to real case studies. To reproduce a real processor behaviour, three main features must be taken into account: i) the power of the test bed must be controlled to vary at the same rate as in a real processor; ii) the temperatures achieved must be realistic and iii) the response to power changes must occur in a practical time frame. The test bed developed in this work is based on a
commercial processor, the Intel® Pentium® 4 processor in the
423-pin package and was designed in accordance with the specifications given in the manual of the processor [11]. As in the commercial processor, the heat source is in contact with an Integrated Heat Spreader (IHS). The contact between the heat source and the IHS is made through the use of a thermal interface material (AKASA AK-460 Thermal Compound), similar to that used in most common commercial personal computers, to guarantee a good thermal contact between the processor and the cooling system (Figure 1). The IHS is made of the same material of that used in practice and has similar dimensions (27.5 x 27.5 mm2) in accordance with [11]. The components are assembled in a support base which is designed to allow the accommodation of different cooling systems and is made to resist to the temperature of the heat source. The main component of the heat source is a transistor, which was chosen, in opposition to an electrical resistance system, because it allows fulfilling the three aforementioned design characteristics. A heat source based on electrical resistances was tested first, but the results showed that, although the temperatures achieved were realistic, the time response was not in accordance to those expected for a real processor. Nevertheless, the transistor must be selected in order to achieve power dissipations of the same order of magnitude as those in the commercial processor, with response times allowing to fulfil the required time response rates, as assured in preliminary tests using a commercial air cooling system. The transistor used in the present system is based on a Darlington scheme which allows obtaining higher power dissipation and a more accurate control on power dissipation. The temperature of the system is monitored by three K type
thermocouples: two in direct contact with the heat spreader and a third in direct contact with the heat source. This arrangement allows controlling the effects of cooling on both elements of the test bed.
Figure 2 shows a photo of the test bed assemblage. The facility can accommodate different cooling systems and allows to perform three different types of tests, namely: at constant power dissipation (from 0 to 60 W), at a constant temperature for one of the thermocouples or it may introduce power variations during a test, to simulate the dynamic boundary conditions of a real processor. The entire control system for this test bed has been
developed by the authors. It includes a microcontroller (Microchip
® PIC18F8722) which, in association with a
specific board, also from Microchip®, and by means of
auxiliary circuits specifically developed for this purpose, has the ability to control the power variation and to monitor and collect the measured data. The signal of the thermocouples is monitored and collected by the microcontroller. A program was then created to receive the test parameters from a personal computer and monitor and collect the measured data, online, while a test is being performed. All the communications are made by means of a communication protocol via an RS-232 interface. The various tests configuration can be selected by the means of a computer interface, also developed for this particular application. All the measured data return to the personal computer and are automatically saved in a file with a format chosen by the user. The power control and necessary variations are made automatically in real time, eliminating the need for the user to perform any type of manual control or verification during the tests. The control program also ensures a continuous monitoring of the system temperature in order to ensure that its maximum limit is not reached.
Heat Spreader
Thermal
Interface Material
Heat Source
K type
Thermocuples
TemperatureTemperatureTemperatureTemperature
ValueValueValueValue
RoomRoomRoomRoom
HumidityHumidityHumidityHumidity
Hygrometer
Air
Fluid
Manometer
Z
X
Y
Heat Spreader
Thermal
Interface Material
Heat Source
K type
Thermocuples
TemperatureTemperatureTemperatureTemperature
ValueValueValueValue
RoomRoomRoomRoom
HumidityHumidityHumidityHumidity
Hygrometer
Air
Fluid
Manometer
Heat Spreader
Thermal
Interface Material
Heat Source
K type
Thermocuples
TemperatureTemperatureTemperatureTemperature
ValueValueValueValue
RoomRoomRoomRoom
HumidityHumidityHumidityHumidity
Hygrometer
Air
Fluid
Manometer
Z
X
Y
Figure 1 – Schematic of the test facility.
Figure 2 – Assemblage.
Using the ability of the system to introduce power variations during a test, the experiments conducted here were based on the power profiles reported by Isci and Martonosi [10], who obtained live power measurements for benchmarks as well as some desktop applications for an Intel
® Pentium®
4 processor, by combining real total power measurement with performance-counter-based per-unit power estimation. To study the design parameters of Direct-Contact-
Intermittent-Spray-Cooling, a cooling system was built which sprays a dielectric fluid directly onto the heat spreader. Two fluids are used, methoxy-nonafluorobutane (HFE7100 - C4F9OCH3) manufactured by 3M and methanol (CH3OH). The thermo-physical properties of the working liquids are presented in Table 1. The information provided here is based on that supplied by 3M for the HFE7100 and by CRC Handbook of Chemistry and Physics [12] for the methanol.
2

The fluid is supplied from a tank pressurized with air and
delivered by a fast response electronic valve, supplied by Candela, through a nozzle, as depicted in Figure 1. An electronic circuit was developed, combined with a function generator, to control the frequency and the duty cycle of the valve signal.
Table 1 – Working fluids Thermo-physical properties.
Fluid HFE 7100 Methanol
ρ [kg m-3] 1488 788
µ x 1004 [kg m-1 s-1] 5.7 5.6
σ x 1003 [kg s-2] 13.6 22.3
α x 1008 [m2 s-1] 3.9 10.4
k x 1003 [W m-1 K-1] 68.8 203.3
cp [J kg-1 ºC-1] 1177 2481
Temp.b [ºC] 61 65
hfg [kJ kg-1] 126 1158
The values of pressure reported in the present paper are measured by a manometer placed just before the electronic valve (Figure 1). The spray system is accommodated in a micrometer
translation platform which provides a precise positioning of the nozzle in relation to the test bed, allowing displacements on the x axis, y axis and z axis (x=0, y=0 corresponds to the position where the spray is centred with the IHS). The impact angle of the spray onto the surface of the test bed can also be varied from 0 deg to 90 deg.
RESULTS AND DISCUSSION
The present paper aims to provide the guidelines to optimize the design parameters of Direct-Contact-Intermittent-Spray-Cooling systems applied under dynamic behaviour conditions. Cader et al. [6] have already investigated the ability of spray cooling to handle transient die power dissipation and it effects on device reliability, but they evaluated the transient condition by switching on and off the power supply, so that transient responses during processor’s operation were not investigated. On the other hand, Panão and Moreira [8, 9] studied the effects of injection parameters (such as frequency, pulse duration, pressure and impingement distance) on the performance of intermittent cooling systems under static boundary conditions. The study reported here make use of the ability of test
facility to introduce power variations during a test, as to reproduce power profiles of the processor during its normal use (e.g. opening an Internet site). This procedure was followed with the intention of verifying, for real conditions, the choice of the most important parameters to enhance the system cooling performance and to establish guidelines values for the design of a practical cooling system. Here, the duty cycle is defined as the ratio of the pulse duration to the pulse period, considering a signal made of rectangular pulses, as by the Alliance for Telecommunications Industry Solutions [13]. The effect of the distance from the nozzle to the test bed
was considered, for the spray at various conditions, when the test bed dissipates 60W (constant power tests). The absolute distance of the nozzle to the surface (dnoz) was varied from
few millimetres (≈ 5 mm) above the surface up to 80 mm and the results show that, for large distances, the temperature of the processor is globally higher and evidences a trend of continuous increase, thus indicating a deterioration of the potential of the spray cooling capability. This is illustrated in figure 3, where the temporal evolution of the temperature
registered by the thermocouple in direct contact with the heat source is shown for several conditions. In particular, it is worth noting the results obtained at the larger distance (dnoz = 78 mm), which suggest that the thermal equilibrium of the system is no longer attained, even using a large duty cycle. Further increasing dnoz, the cooling performance of the spray continues to degrade down to a point where the test bed cannot be cooled below its maximum working temperature. At this point the tests had to be interrupted in order to avoid permanent damages of the test bed. A similar behaviour is observed when the nozzle is very close to the test surface (dnoz < 10 mm) and can be explained as in Mudawar and Estes [14]: as the IHS is square, the cooling performance depends weather the spray impact area covers, or not, the entire surface
of the heater. Hence, when dnoz is increased past the point of heated area inscription, the cooling performance decreases due to the fact that a fraction of the liquid leaving the nozzle does not meet the surface and is wasted. On the other hand, when the dnoz is very small, the spray impact area decreases and only a small fraction of the heated area is directly impacted by the spray drops (in the present study only a small portion on the centre of the IHS) which is insufficient to achieve the thermal equilibrium for high power peaks, such as those considered here. In line with this, the optimal dnoz obtained with the injector used in the present study lays between 20 and 30 mm, which is the minimal distance ensuring that the impact area just inscribes the heat spreader area. The signal applied to the electronic valve was also studied
for constant power tests in order to select the range of frequencies and duty cycles to be considered in the experiments. Once again, thermal equilibrium is not attained at all conditions, particularly when higher frequencies are associated with small duty cycles. This is illustrated in figure 4, which depicts the variation of temperature at the heat source for an injection frequency of 3.1 Hz and duty cycle of 25.0%, for which the cooling system is no longer capable of keeping the heat source temperature below its maximum working value and the test had to be aborted around 50 seconds after it started. Other design parameters were further investigated under
dynamic conditions. Each was varied independently with the nozzle at the optimal distance from the surface (dnoz = 20 mm) and with thermal boundary conditions corresponding to the one of power profiles measured by Isci and Martonosi [10] in benchmarks and desktop applications for an Intel® Pentium®
4 processor. This particular power profile (see figure 5) was chosen because it gathers multiple operation conditions of a real processor under demanding situations, thus being a good case study to evaluate the behaviour of the ISCS. Moreover, the selected profile includes most of the thermal characteristics of benchmarks and desktop applications.
For all the tests, the spray cooling technique is applied to the test bed at the same time that the power profile starts. In this manner, instead of evaluating the temperature decay of the test bed when the cooling system is activated (as in previous works reported by Panão and Moreira [8, 9]), the experiments start at room temperature, so that the cooling performance is evaluated under more realistic conditions along the power profile duration. Three different injection pressures were selected (2.3 bar,
3.3 bar and 5.0 bar) after a preliminary study, which revealed that 2.3 bar was sufficient to assure an adequate atomization and with a good cooling performance. The frequency of injection was varied from 0.8 Hz up to 2.6 Hz, a 3.25 fold increase which was observed to be enough to conclude on the
3
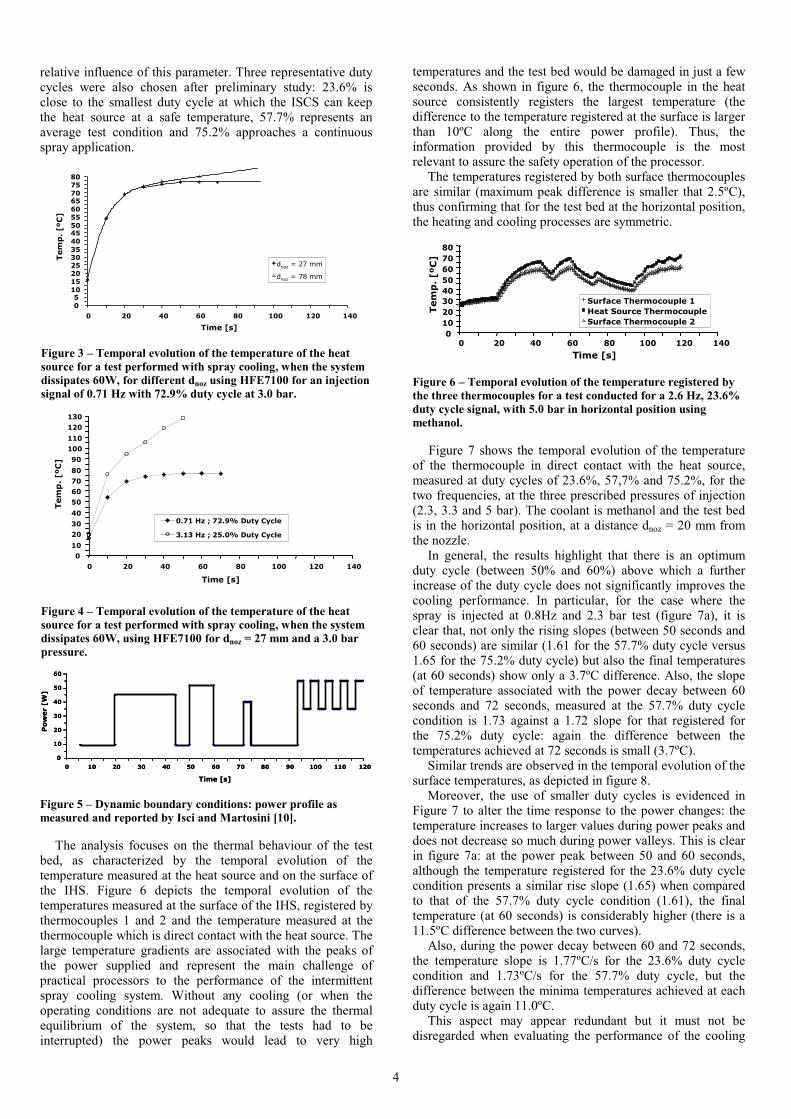
relative influence of this parameter. Three representative duty cycles were also chosen after preliminary study: 23.6% is close to the smallest duty cycle at which the ISCS can keep the heat source at a safe temperature, 57.7% represents an average test condition and 75.2% approaches a continuous spray application.
0
510
15
20
253035
40
4550
55
60
6570
75
80
0 20 40 60 80 100 120 140
Time [s]
Tem
p.
[ºC
]
dnoz = 27 mm
dnoz = 78 mm
Figure 3 – Temporal evolution of the temperature of the heat source for a test performed with spray cooling, when the system dissipates 60W, for different dnoz using HFE7100 for an injection signal of 0.71 Hz with 72.9% duty cycle at 3.0 bar.
0
10
20
30
40
50
60
70
80
90
100
110
120
130
0 20 40 60 80 100 120 140
Time [s]
Tem
p.
[ºC
]
0.71 Hz ; 72.9% Duty Cycle
3.13 Hz ; 25.0% Duty Cycle
Figure 4 – Temporal evolution of the temperature of the heat source for a test performed with spray cooling, when the system dissipates 60W, using HFE7100 for dnoz = 27 mm and a 3.0 bar pressure.
0
10
20
30
40
50
60
0 10 20 30 40 50 60 70 80 90 100 110 120
Time [s]
Pow
er [
W]
0
10
20
30
40
50
60
0 10 20 30 40 50 60 70 80 90 100 110 120
Time [s]
Pow
er [
W]
Figure 5 – Dynamic boundary conditions: power profile as measured and reported by Isci and Martosini [10].
The analysis focuses on the thermal behaviour of the test bed, as characterized by the temporal evolution of the temperature measured at the heat source and on the surface of the IHS. Figure 6 depicts the temporal evolution of the temperatures measured at the surface of the IHS, registered by thermocouples 1 and 2 and the temperature measured at the thermocouple which is direct contact with the heat source. The large temperature gradients are associated with the peaks of the power supplied and represent the main challenge of practical processors to the performance of the intermittent spray cooling system. Without any cooling (or when the operating conditions are not adequate to assure the thermal equilibrium of the system, so that the tests had to be interrupted) the power peaks would lead to very high
temperatures and the test bed would be damaged in just a few seconds. As shown in figure 6, the thermocouple in the heat source consistently registers the largest temperature (the difference to the temperature registered at the surface is larger than 10ºC along the entire power profile). Thus, the information provided by this thermocouple is the most relevant to assure the safety operation of the processor. The temperatures registered by both surface thermocouples
are similar (maximum peak difference is smaller that 2.5ºC), thus confirming that for the test bed at the horizontal position, the heating and cooling processes are symmetric.
0
10
20
30
40
50
60
70
80
0 20 40 60 80 100 120 140
Time [s]
Tem
p. [ºC
]
Surface Thermocouple 1
Heat Source Thermocouple
Surface Thermocouple 2
Figure 6 – Temporal evolution of the temperature registered by the three thermocouples for a test conducted for a 2.6 Hz, 23.6% duty cycle signal, with 5.0 bar in horizontal position using methanol.
Figure 7 shows the temporal evolution of the temperature of the thermocouple in direct contact with the heat source, measured at duty cycles of 23.6%, 57,7% and 75.2%, for the two frequencies, at the three prescribed pressures of injection (2.3, 3.3 and 5 bar). The coolant is methanol and the test bed is in the horizontal position, at a distance dnoz = 20 mm from the nozzle. In general, the results highlight that there is an optimum
duty cycle (between 50% and 60%) above which a further increase of the duty cycle does not significantly improves the cooling performance. In particular, for the case where the spray is injected at 0.8Hz and 2.3 bar test (figure 7a), it is clear that, not only the rising slopes (between 50 seconds and 60 seconds) are similar (1.61 for the 57.7% duty cycle versus 1.65 for the 75.2% duty cycle) but also the final temperatures (at 60 seconds) show only a 3.7ºC difference. Also, the slope of temperature associated with the power decay between 60 seconds and 72 seconds, measured at the 57.7% duty cycle condition is 1.73 against a 1.72 slope for that registered for the 75.2% duty cycle: again the difference between the temperatures achieved at 72 seconds is small (3.7ºC). Similar trends are observed in the temporal evolution of the
surface temperatures, as depicted in figure 8. Moreover, the use of smaller duty cycles is evidenced in
Figure 7 to alter the time response to the power changes: the temperature increases to larger values during power peaks and does not decrease so much during power valleys. This is clear in figure 7a: at the power peak between 50 and 60 seconds, although the temperature registered for the 23.6% duty cycle condition presents a similar rise slope (1.65) when compared to that of the 57.7% duty cycle condition (1.61), the final temperature (at 60 seconds) is considerably higher (there is a 11.5ºC difference between the two curves). Also, during the power decay between 60 and 72 seconds,
the temperature slope is 1.77ºC/s for the 23.6% duty cycle condition and 1.73ºC/s for the 57.7% duty cycle, but the difference between the minima temperatures achieved at each duty cycle is again 11.0ºC. This aspect may appear redundant but it must not be
disregarded when evaluating the performance of the cooling
4

system because, although the system may seem apparently efficient in cooling the surface, it may not be able to keep temperature of the heat source within safety conditions.
0
10
20
30
40
50
60
70
80
0 20 40 60 80 100 120 140
Time [s]
Tem
p.
[ºC
]
23.6% Duty Cycle
57.7% Duty Cycle
75.2% Duty Cycle
(a)
0
10
20
30
40
50
60
70
80
0 20 40 60 80 100 120 140
Time [s]
Tem
p. [ºC
]
23.6% Duty Cycle
57.7% Duty Cycle
75.2% Duty Cycle
(b)
0
10
20
30
40
50
60
70
80
0 20 40 60 80 100 120 140
Time [s]
Tem
p.
[ºC
]
23.6% Duty Cycle
57.7% Duty Cycle
75.2% Duty Cycle
(c)
0
10
20
30
40
50
60
70
80
0 20 40 60 80 100 120 140
Time [s]
Tem
p.
[ºC
]
23.6% Duty Cycle
57.7% Duty Cycle
75.2% Duty Cycle
(d)
0
10
20
30
40
50
60
70
80
0 20 40 60 80 100 120 140
Time [s]
Tem
p.
[ºC
]
23.6% Duty Cycle57.7% Duty Cycle75.2% Duty Cycle
(e)
0
10
20
30
40
50
60
70
80
0 20 40 60 80 100 120 140
Time [s]
Tem
p.
[ºC
]
23.6% Duty Cycle
57.7% Duty Cycle
75.2% Duty Cycle
(f)
Figure 7 – The temporal evolution of the temperature registered by the thermocouple in direct contact with the heat source, when the test bed is in the horizontal position, using methanol, varying the duty cycle for different conditions: (a) 0.8 Hz for 2.3 bar; (b) 2.6 Hz for 2.3 bar; (c) 0.8 Hz for 3.3 bar; (d) 2.6 Hz for 3.3 bar; (e) 0.8 Hz for 5.0 bar; (f) 2.6 Hz for 5.0 bar.
The advantage of the ISCS stems from the capacity to deal efficiently with this aspect: using an adequate fluid (dielectric) the heat source can be directly cooled eliminating the intermediate surface (IHS) which is required in other cooling systems (e.g. air cooling systems or indirect liquid cooling systems). Overall, it is now clear from figures 7 and 8 that the temperature of the surface is significantly lower than that of the heat source and the response to the transient power variations (e.g. in the last part of the profile which reproduces the 30W power swing) is almost unnoticed in the surface temperature.
0
10
20
30
40
50
60
70
0 20 40 60 80 100 120 140
Time [s]
Tem
p.
[ºC
]
23.6% Duty Cycle
57.7% Duty Cycle
75.2% Duty Cycle
(a)
0
10
20
30
40
50
60
70
0 20 40 60 80 100 120 140
Time [s]
Tem
p.
[ºC
]
23.6% Duty Cycle
57.7% Duty Cycle
75.2% Duty Cycle
(b)
Figure 8 – The temporal evolution of the temperature registered by one of the surface thermocouple, when the test bed is in the horizontal position, using methanol, varying the duty cycle for different conditions: (a) 0.8 Hz for 2.3 bar; (b) 2.6 Hz for 2.3 bar.
Figures 9 and 10 further demonstrate that the effects of the frequency and pressure of injection are negligible compared with those of the duty cycle. Also, though not reported here due to lack of space, the surface temperature behaves similarly. It is worth noting, however, that the duty cycles considered so far were obtained varying simultaneously the frequency and the duration of injection in such a way to keep the liquid flow constant.
Given the negligible effect of pressure regardless the duty cycle, a practical system should use the lowest pressure capable of achieving a good atomization in order to keep hardware as simple as possible. The analysis performed so far highlights that the duty cycle
is the operational parameter of an ISCS that allows a more accurate control of the temperature of the processor. This is in accordance with previous studies by Panão and Moreira [8, 9], who reported detailed research of the effects of injection parameters, as previously refer, on the thermal response of a cooling system with stationary thermal boundary conditions. Also Shedd [7] refers that it is the droplet flux which controls the heat transfer performance and Bash et al. [15] reported that, for heat fluxes of the order of those achieved in the present study, the critical heat flux is flow limited. In line with this, the present study confirms an improvement of the cooling performance of the system as the duty cycle increases up to an optimum value, of the order of 60%, above which the cooling system cannot lower significantly the temperature of processor. This trend is associated by Panão and Moreira [9] with the formation of a liquid film at the surface, which mitigates heat removal by phase change. In this context, the
5

value of the lowest temperature achievable by spraying the heated surface depends, not only on droplet flux at impact, but also on the thermo-physical properties of the coolant (namely its latent heat of vaporization and saturation temperature). However, it is worth noting that Panão and Moreira [8] achieved smaller duty cycles with similar coolant properties and much larger droplet fluxes. Careful analysis allows us to attribute this to the dynamic (instead of static) thermal boundary conditions of our experiments.
0
10
20
30
40
50
60
70
0 20 40 60 80 100 120 140
Time [s]
Tem
p.
[ºC
]
Freq. 0.8 Hz
Freq. 2.6 Hz
Figure 9 – The temporal evolution of the temperature registered by the thermocouple in direct contact with the heat source, when the test bed is in the horizontal position, using methanol, for a 2.3 bar test and a injection signal with 57.7% duty cycle for the two different frequencies.
0
10
20
30
40
50
60
70
80
0 20 40 60 80 100 120 140
Time [s]
Tem
p.
[ºC
]
2.3 bar
3.3 bar
5.0 bar
Figure 10 – The temporal evolution of the temperature registered by the thermocouple in direct contact with the heat source, varying the pressure, when the test bed is in the horizontal position, using methanol for a 23.6 % duty cycle and 2.6 Hz signal.
In the context of the discussion above, the angle of impact is expected to alter the dynamics of the liquid film and therefore, the thermal behaviour of the system. Several experiments were then conduced with the processor in the vertical position, which would preclude the formation of the liquid film over the IHS. The experiments were again performed with methanol, for dnoz = 20mm and followed the same methodology as for the processor in the horizontal position. Figure 11 depicts the thermal response for the three duty cycles (23.6%, 57.7%, 75.2%), the two frequencies of injection (0.8Hz and 2.6Hz) and for the lower injection pressure (2.3 bar). The results in the Figure show that, also in this case, the systems performs better when the duty cycle increases from 23.6% to 57.7%, although now with a lower gain than with the test bed in the horizontal position. Further increasing the duty cycle, one can still slightly cool down the heat source but the benefits of increasing the duty cycle over 60% are also reduced. For instance, for the power peaks occurring at 60 seconds the final temperature achieved at duty cycle of 23.6% is of the order of 6.5ºC to 8ºC larger than that achieved at a duty cycle of 57.7%. However, the difference between the temperatures achieved at duty cycles of 57.7% and the largest duty cycle of 75.2% is always smaller than 5ºC (for 0.8Hz) and 4ºC (for 2.6Hz).
0
10
20
30
40
50
60
70
80
0 20 40 60 80 100 120 140
Time [s]
Te
mp
. [ºC
]
23.6% Duty Cycle
57.7% Duty Cycle
75.2% Duty Cycle
(a)
0
10
20
30
40
50
60
70
80
0 20 40 60 80 100 120 140
Time [s]
Tem
p. [ºC
]
23.6% Duty Cycle
57.7% Duty Cycle
75.2% Duty Cycle
(b)
Figure 11 – The temporal evolution of the temperature registered by the thermocouple in direct contact with the heat source, varying the duty cycle, when the test bed is in the vertical position, using methanol for different conditions: (a) 0.8 Hz for 2.3 bar; (b) 2.6 Hz for 2.3 bar.
Figure 12 shows the distribution of the surface temperature compared with that measured at the heat source for an illustrative test condition. It is now noticeable a difference between the temperatures measured by the two surface thermocouples, which indicates that the surface cooling is no longer homogeneous when the test bed is in the vertical position. The difference is of the order of 5ºC, with smaller values measured at the region of the surface which is firstly impinged by the spray (thermocouple 1). Moreover, the values of surface temperature reported in Figure 12 are larger than those measured with the processor in the horizontal position and closer to the temperatures measured at the heat source. This trend is a clear result of the influence of gravity on the
dynamics of the liquid film. When the processor is in the horizontal position, the vaporization of the liquid film remaining at the surface between successive injections, guarantees a continuously removal of heat thus allowing to keep the surface temperature lower for the following power peaks (which during the test will also contribute to control the temperature of the heat source). This is observed, for instance in the last part of the power profiles where, in the short periods of power decrease the cooling is not enough to decrease the temperature which will subsequently be higher in the following power peaks. On the other hand, when the processor is in the vertical position, the spray is promptly swept away from the surface. The main differences between the thermal behaviour of the
system are better understood in figure 13, which compares the temperatures at the heat source when the ISCS operates at 2.3 bar, with a frequency of injection frequency of 0.8 Hz and a duty cycle of 57.7%. The Figure clearly shows that the temperature at the heat source is larger by almost 12ºC when the processor is in the vertical position, thus corroborating that the cooling system acts less efficiently when the test bed is in the vertical position, which contrasts with the recommendations given in Shedd [7]. Similar trends are observed for different frequencies and
duty cycles, in the sense that the temperatures measured at both, the IHS and the heat source, are larger when the test bed is vertical, contrarily to what was expected considering that the film would lead to a less efficient heat extraction (e.g.
6

Shedd [7], Panão and Moreira [8]). It can be speculated that the differences may be due to a less efficient area subscription of the spray when the impacted surface is vertical, particularly because droplets swept away from the surface, thus reducing the time of thermal contact. The contact area is also altered (e.g. Moreira et al. [16]) which, again, precludes an efficient heat removal by phase change.
0
10
20
30
40
50
60
70
0 20 40 60 80 100 120 140
Time [s]
Tem
p.
[ºC
]
Surface Thermocouple 1
Heat Source Thermocouple
Surface Thermocouple 2
Figure 12 – The temporal evolution of the temperature registered by the three thermocouples, when the test bed is in the vertical position, using methanol for 2.3 bar with a 75.2% duty cycle and 0.8 Hz signal.
0
10
20
30
40
50
60
70
80
0 20 40 60 80 100 120 140
Time [s]
Tem
p. [ºC
]
Horizontal
Vertical
Figure 13 – The temporal evolution of the temperature registered by the thermocouple in direct contact with the heat source, varying the test bed position, for a 2.3 bar test with a 57.7% duty cycle and 0.8 Hz injection signal.
Although the experiments performed with the test bed in the vertical position show generally worse cooling performances than those obtained at the horizontal position, the duty cycle is still the operational parameter which most affects the thermal behaviour of the system, when compared to the injection frequency. An exhaustive study performed to optimize the cooling performance of the processor in the vertical position, showed that the spray must operate with a duty cycle of 50%-60%. In summary, based on the aforementioned role of the
contact time of the impingement spray and of the benefit role of the liquid film in abrupt consecutive power peaks, one should recommend for the design and integration of practical systems a configuration considering the horizontal positioning of the processor. Moreover, it is more advantageous and safe, in a real system to work with a mid term duty cycle, of the order of 50%-60% (even if it may lead to a thin film formation during part of the working period), which provides good practical results in terms of the temperature of the processor, than trying to alter the operation conditions between smaller and higher duty cycles, since the use of very small duty cycles brings the system to dangerous high working temperatures and the thermal response of the system may not be fast enough to avoid damages, given that the temperature increase is very fast on the continuous power peaks. Duty cycles within the range between 50% and 60% still offer a much more effective working mode in terms of fluid management since it allows significant fluid consumption when compared to a continuous
spray cooling system. Smaller duty cycles, promoting phase change, should be effective in less demanding conditions and in this case they should offer optimum fluid management performances.
Further improvements may be achieved by optimizing the properties of the working fluid, namely the temperature for phase change and the latent heat of evaporation (e g., Panão and Moreira [8]). In this context, further experiments were conducted using a dielectric fluid, the methoxy-nonafluorobutane (HFE7100). Although not showed here due to paper length constrains,
the temporal evolution of the temperature was measured at different duty cycles, with two frequencies of injection at a pressure of injection of 2.3 bar. When compared with the results obtained with methanol the temperatures measured at the heat source using the HFE7100 are much larger, as expected, since the vaporization temperature is similar for both fluids but the latent heat of evaporation of the HFE7100
is much smaller (hfgMethanol 9.hfgHFE7100). It is clear here, given the low latent heat of evaporation of the liquid which further reduces the heat flux removal, that small duty cycles, which are associated with smaller flows, are not sufficient to maintain the test bed surface at a low safe temperature, thus the tests were automatically stopped by the security routine to avoid damages in the test bed. There is an evident improvement of the cooling
performance of the system when the duty cycle is increased from 23.6% to 57.7%. Further increasing the duty cycle there is still some improvement, when comparing to the experiments performed with methanol, as in this case the vaporization of the liquid over the surface of the IHS is faster, given the smaller hfg, which delays the formation of a liquid film thick enough to mitigate an effective heat removal by phase change. Nevertheless the difference in the temperature curves obtained for the duty cycle of 57.7.% and 75.2% is at the most of 9ºC, against 18.6ºC difference obtained when the duty cycle is increased from 23.6% to 57.7%. Therefore, although the exact optimum value of the duty cycle may be slightly adjusted depending on the properties of the working liquid, the results obtained for the whole conditions studied here suggest an optimum working range between 50% and 60%, which allows a significant fluid consumption, thus confirming the advantage of the ISCS in terms of fluid management potential, as strongly argued by previous authors (e.g. Bash et al. [15], Panão and Moreira [8, 9]) while it assures the safety of the system. Any significant changes are observed, also using a fluid
with different properties, in changing the injection frequency. The properties of the working fluid are naturally important
and major improvements can be achieved by combining the design of the cooling system with the development of an appropriate working fluid. However, as the selection of the working fluid for current systems can be much limited from the commercial point of view, to the cost and availability of the fluid, an adjustment of the system duty cycle can work as an alternative solution, when the choice of the most adequate fluid is restricted to commercial limitations. The control of this parameter should act based on the temperature of the heat source, which quickly responds to power variations (most of the existing commercial systems are based on temperature information also, although not always on the most critical points, which leads to additional costs to ensure the safety of the system) to avoid damages due to burnout of the system.
7

CONCLUSIONS
This paper reports an experimental study conducted to identify the main operational parameters to be considered in the design of efficient Direct-Contact-Intermittent-Spray-Cooling systems. The final aim is to assist computer product designers and manufacturers to develop new cooling systems and compare diverse cooling technologies. For that purpose a test bed has been designed and build to reproduce pre-programmed power profiles during the tests, which replicate those measured in benchmarks and desktop applications for a real processor. The experiments were conduced to infer on the effect of several operation conditions (injection frequency and duty cycle, the distance between the nozzle and the test bed, the injection pressure, the position of the test bed and the properties of the working fluid). The results showed that the best performance of the system is achieved when the distance from the spray nozzle to the impacted is within a definite range. Outside this range, the cooling performance is degraded as the spray area does not cover the surface of the test bed: the minimum distance to surface distance is that assuring that the spray area just covers the surface
of the
heater. For the spray used in the current study this range is between 20 and 30 mm. The experiments confirm that the main conclusions drawn
in previous studies under static boundary conditions, still apply under the dynamic boundary conditions of real processors: the duty cycle is the main operational parameter to consider in the control of the cooling system; injection pressure and frequency have a negligible influence, so that small injection pressures and frequencies can be used with evident advantages for the design of a commercial system compatible with the hardware used in a personal computer. However, the analysis must take into account that a dynamic system brings a stringent constraint to the operation of the system, which is the need to keep the core temperature of the system below safety values. In this context, there is a range of duty cycles above which the cooling performance does not improves due to the formation of a thick liquid film over the IHS which will mitigate an efficient heat removal by phase change. The whole tests performed here point that, for the current ISCS, this value lies within 50-60%. Based on these results one should recommend that it can be more advantageous and safe to work with a mid term duty cycle, of the order of 50%-60% (even if it may lead to a thin film formation during part of the working period), which provides good practical results in terms of the temperature of the processor, than trying to alter the operation conditions between smaller and higher duty cycles, since the use of very small duty cycles brings the system to dangerous high working temperatures and the thermal response of the system may not be fast enough to avoid damages, given that the temperature increase is very fast on the continuous power peaks. Duty cycles within the range between 50% and 60% still offer a much more effective working mode in terms of fluid management since they allow significant fluid consumption when compared to a continuous spray.
ACKNOWLEDGMENT
The authors acknowledge the contribution of the National Foundation of Science and Technology by supporting the research through the project “Advanced Intermittent Spray Cooling Systems” (PTDC/EME-MFE/69459/2006). The authors are also grateful to Msc. Eng. Ana Moita for her help and support during the presented work.
NOMENCLATURE cp Specific heat capacity at constant
pressure
J kg-1
K-1
CPU Central Processing Unit
d Distance mm
hfg Latent heat of vaporization kJ kg-1
IHS Integrated Heat Spreader
ISCS Intermittent Spray Cooling System
ITRS International Technology Roadmap
for Semiconductors
k Thermal conductivity W m-1
K-1
Temp. Temperature ºC
Greek Symbols
αααα Thermal diffusivity m2 s-1
ρρρρ Density kg m-3
µ Dynamic viscosity kg m-1
s-1
σ Surface tension N m-1
Subscripts
b Boiling
noz Nozzle
REFERENCES
[1] Moore’s Law – Made real by Intel® innovation, available at
http://www.intel.com/technology/mooreslaw/
[2] J. Hennessy and D. A. Patterson, Computer Architecture: A
Quantitative Approach, 3rd
ed, Morgan Kaufmann, 2003. [3] A. Bar-Cohen, M. Arik, M. Ohadi, Direct Liquid Cooling of High
Flux Micro and Nano Electronic Components, Proc. of the IEEE, vol. 94, n. 8, pp 1549-1570, 2006.
[4] Evolution of Parallel Computing, available at http://www.intel.com/platforms/parallel.htm
[5] P. Y. Paik, K. Chakrabarty, V. K. Pamula, Adaptive Cooling of
Integrated Circuits Using Digital Microfluidics, Artech House, 2007.
[6] T. Cader, L. J. Westra, R. C. Eden, Spray Cooling Thermal
Management for Increased Device Reliability, IEEE Transactions on Device and Materials Reliability, vol. 4, n. 4, 2004.
[7] T. A. Shedd, Next Generation Spray Cooling: High Heat Flux
Management in Compact Spaces, Heat Transfer Engineering, vol. 28, n. 2, pp 87-92, 2007.
[8] M. R. O. Panão and A. L. N. Moreira, , Intermittent Spray
Cooling: towards a new technology concept, 6th
International Conference on Multiphase Flow (ICMF 2007), Leipzig,
Germany, 2007.
[9] M. R. O. Panão and A. L. N. Moreira, Intermittent Spray Cooling:
a new technology for controlling surface temperature, Submitted
to the International Journal of Heat and Fluid Flow, 2008.
[10] C. Isci and M. Martonosi, Runtime Power Monitoring in High-
End Processors: Methodology and Empirical Data, Proc. of 36th
Annual IEEE/ACM International Symposium on
Microarchitecture (MICRO-36), pp 93 – 104, 2003. [11] Intel
® Pentium
® 4 Processor in the 423-pin Package at 1.30, 1.40,
1.50, 1.60, 1.70, 1.80, 1.90 and 2 GHz, Intel®, August 2001
(available at
http://download.intel.com/design/Pentium4/datashts/24919805.pd
f). [12] D. R. Lide, CRC Handbook of Chemistry and Physics, 85
th ed.,
2004-2005. [13] Information available at http://www.atis.org/glossary
[14] I. Mudawar, and K. A. Estes, Optimizing and Predicting CHF in
Spray Cooling of a Square Surface, Journal of Heat Transfer, vol. 18, n. 3, pp 672-679, 1996.
[15] C. E. Bash, C. D. Patel, R. K. Sharma, Inkjet assisted spray
cooling of electronics, Proc. of International Electronic Packaging Technical Conference and Exhibition, Hawaii, USA, 2003.
[16] A. L. N. Moreira, G. E. Cossali, M. Marengo, M. Santini, Secondary atomization of water and isooctane drops impinging
onto tilted heated surfaces. Exp. Fluids, vol. 43, pp 297-313, 2007.
8







