Download - Coverage Issues in WSNs.ppt

Coverage Issues in WSNs
Presented by Ming-Tsung Hsu

Outline
Wireless Sensor Networks Coverage Issues

Wireless Sensor Networks

Faster, Smaller, Numerous
Moore’s Law “Stuff” (transistors, etc)
doubling every 1-2 years
Bell’s Law New computing class
every 10 years
year
log
(p
eo
ple
pe
r c
om
pu
ter)
Streaming Data to/from the
Physical World

Applications
Environmental Monitoring Habitat Monitoring Integrated Biology Structural Monitoring
Interactive and Control Pursuer-Evader Intrusion Detection Automation
Density & Scale
Sample Rate & Precision
MobilityLow Latency
Disconnection & Lifetime

Fundamental Functionalities
Data collection - Sensor subsystem Gathering information and controlling/monitoring
environments Data processing - Process subsystem
Performing local computations Data transmission - Communication
subsystem Exchanging data

Characteristics
A special wireless ad hoc network Large number of nodes are deployed randomly and densely
Scalability & Self-Configuration Battery powered
Energy Efficiency Topology and density change
Adaptivity Working for a common task
Data Centric In-network data processing (Data aggregation)
Message-level Latency

Sensor Deployment
How to deploy sensors over a field? Deterministic, planned deployment Random deployment
Desired properties of deployments? Depends on applications Connectivity Coverage

Sensor Network Formation
Deployed densely and randomly “Dense” means “exits redundant nodes”
Density control “Random” means “topology is indefinite”
Topology control
Self-Configuration & Self-Organization Scalability Energy

Node’s Operations
On-Duty (working) nodes Forming a sensor network Am I redundant ?
Off-duty? Energy Consideration
Role-change? Off-duty?
Off-Duty (sleeping) nodes When to wakeup? On-duty?
Duty cycle policy Scheduling vs. Adaptive Duty period

Coverage, Connectivity
Is every point covered by 1 or K sensors 1-covered, K-covered
Is the sensor network connected K-connected
Others
6
54
3
2
1
7
8 R

Coverage & Connectivity: not independent, not identical If region is continuous & Rt > 2Rs Region is covered sensors are connected
X. Wang (Sensys’03) H. Zhang & J. Hou (2004)
Rs
Rt

Real Products

Problem Tree for Coverage and Connectivity Problems
coverage connectivity
homo
probabilistic
per-node
k-connected
blanket
deployment
adaptive
algorithmic
homo
per-node (Max Rt)
deterministic
barrier
surveillance & exposure
networktopology formation
networkdensity control
adaptive
# of sensorsare needed?
scheduling
K-coverage K-connectivitytopology control
Scheduling ASCENT …
LEACH …
various connected subgraphs
Penrose …Xue&Kumar …
# of sensors?
PEAS …
OGDC …

Coverage Issues

Related Geometric Problems

Surveillance
(a)the Voronoi diagram and the maximal breach path(b)the Delaunay triangulation and the maximal support path

Exposure
2
1
1 2, , ,
t
t
dp tE p t t t I F p t dt
dt
The exposure for an object in the sensor field during the interval 1 2,t t
along a path p t
minimal exposure path the worst coverage of a sensor network

Simple Coverage Problem
Given an area and a sensor deployment Question: Is the entire area covered?
6
54
3
2
1
7
8 R

K-Coverage Problem
Given: region, sensor deployment, integer k Question: Is the entire region k-covered? C.-F. Huang & Y.-C Tseng (WSNA’03)
6
54
3
2
1
7
8 R

Is the perimeter k-covered?

Is a belt region k-barrier covered? Construct a graph G(V, E)
V: sensor nodes, plus two dummy nodes L, R E: edge (u,v) if their sensing disks overlap
Region is k-barrier covered iff L and R are k-connected in G
L R

Density Control
Given: an area and a sensor deployment Problem: turn on/off sensors to maximize the
sensor network’s life time
Density Control (cont’d)
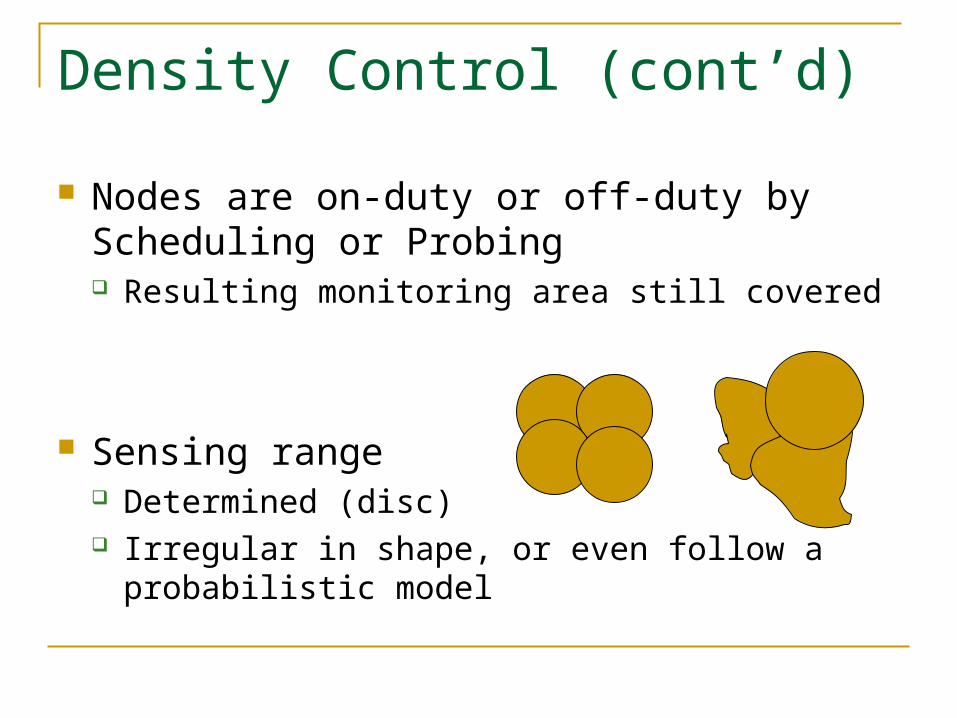
Nodes are on-duty or off-duty by Scheduling or Probing Resulting monitoring area still covered
Sensing range Determined (disc) Irregular in shape, or even follow a probabilistic
model

Approaches for Density Control Adaptive
PEAS (ICNP’02 , ICDCS’03) CCP (SenSys’03)
Scheduling SET K-COVER (ICC’01) Co-Grid (IPSN’04) OGDC (International Workshop on Theoretical
and Algorithmic Aspects of Sensor, Ad hoc Wireless and Peer-to-Peer Networks, 2004)
PEAS and OGDC
PEAS: A robust energy conserving protocol for long-lived sensor networks Fan Ye, et al (UCLA), ICNP’02, ICDCS’03,
“Maintaining Sensing Coverage and Connectivity in Large Sensor Networks” H. Zhang and J. Hou (UIUC), International Workshop on
Theoretical and Algorithmic Aspects of Sensor, Ad Hoc Wireless, and Peer-to-Peer Networks (04), The Wireless Ad Hoc and Sensor Networks: An International Journal (05)

PEAS: basic ideas
Probing Environment and Adaptive Sleeping How often to wake up? How to determine whether to work or not?
Sleep Wake up Go to Work?
workyes
no
Wake-up rate?

How often to wake up?
Desired: the total wake-up rate around a node equals some given value

Inter Wake-up Time
f(t) = λ exp(- λt)
• exponential distribution• λ = average # of wake-ups per unit time

Wake-up rates
f(t) = λ exp(- λt)
f(t) = λ’ exp(- λ’t)
A
B
A + B: f(t) = (λ + λ’) exp(- (λ + λ’) t)

Adjust wake-up rates
Working node knows Desired wake-up rate λd
Measured wake-up rate (form working node) λm
Probing node adjusts its λ byλ := λ (λd / λm)

Go to work or return to sleep? Depends on whether there is a working node
nearby.
Go back to sleep go to work
Rp

Is the resulting network covered or connected?
If Rt ≥ (1 + √5) Rp and … then
P(connected) → 1
Simulation results show good coverage

Basic Idea of OGDC
OGDC: Optimal Geographical Density Control
Minimize the number of working nodes ↔ Minimize the total amount of overlap

Minimum overlap
RsD 3 distance Optimum
overlap minimize To
D
Rs

Minimum overlap (cont’d)
D
RsD 3 distance Optimum
overlap minimize To

Minimum overlap

Near-optimal

OGDC: the Protocol
Time is divided into rounds In each round, each node runs this protocol to
decide whether to be active or not Select a starting node. Turn it on and broadcast a power-
on message Select a node closest to the optimal position. Turn it on
and broadcast a power-on message. Repeat this.

Selecting starting nodes
Each node volunteers with a probability p. Backs off for a random amount of time. If hears nothing during the back-off time, then sends
a message carryingSender’s positionDesired direction

Select the next working node
On receiving a message from a starting node Each node computes its deviation D from the
optimal position. Sets a back-off timer inversely proportional to D.
On receiving a power-on message from a non-starting node

PEAS vs. OGDC
Complexity Coverage Time Sync

Blanket vs. Barrier Coverage
Blanket coverage Every point in the area is covered (or k-covered)
Barrier coverage Every crossing path is k-covered
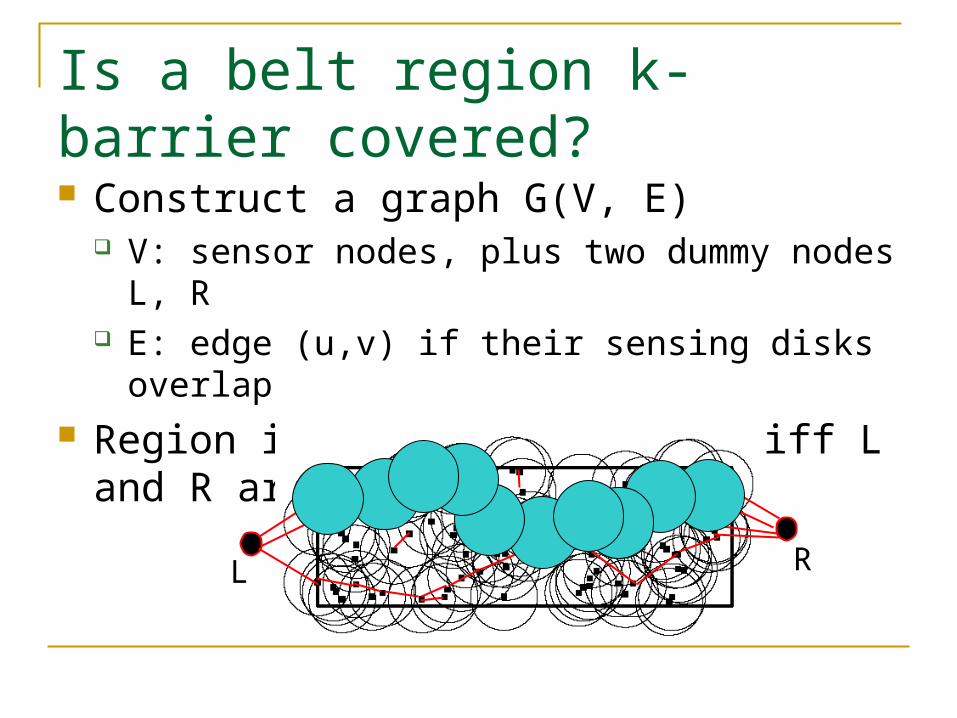
Is a belt region k-barrier covered? Construct a graph G(V, E)
V: sensor nodes, plus two dummy nodes L, R E: edge (u,v) if their sensing disks overlap
Region is k-barrier covered iff L and R are k-connected in G.
L R

Donut-shaped region
K-barrier covered iff G has k essential cycles.

Thanks







