Building an Autostereoscopic Display
CS448A – Digital Photography and Image-Based Rendering
Billy Chen
Original Goals
• dynamic, real-time display
• convenient 3D display for the home (3D desktops)
• autostereoscopic light field viewer
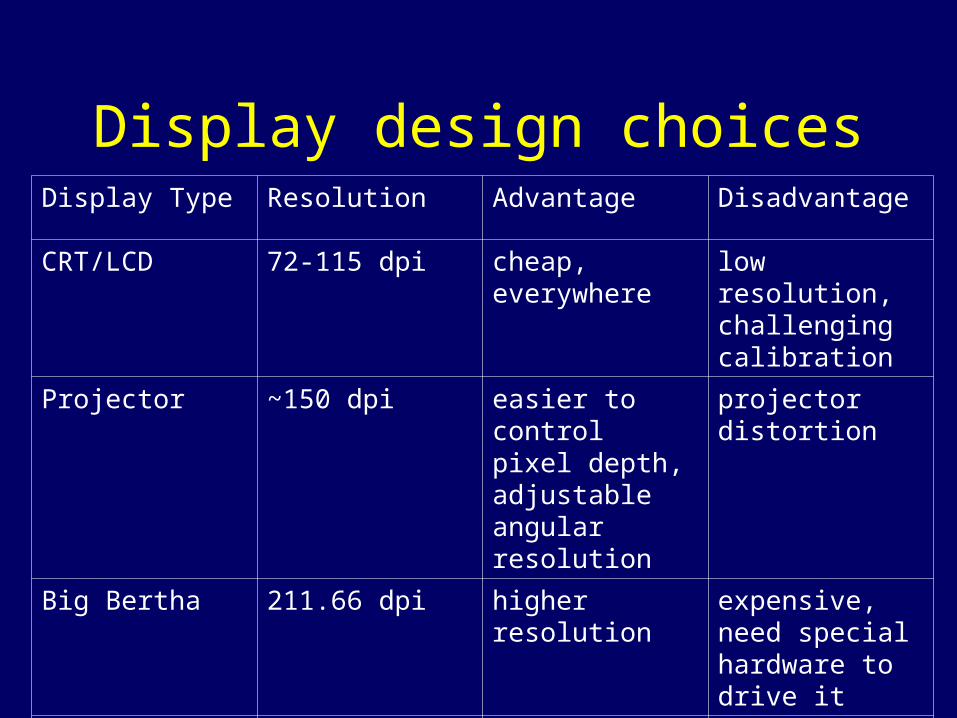
Display design choicesDisplay Type Resolution Advantage Disadvantage
CRT/LCD 72-115 dpi cheap, everywhere low resolution, challenging calibration
Projector ~150 dpi easier to control pixel depth, adjustable angular resolution
projector distortion
Big Bertha 211.66 dpi higher resolution expensive, need special hardware to drive it
Printer 300 dpi high resolution static images
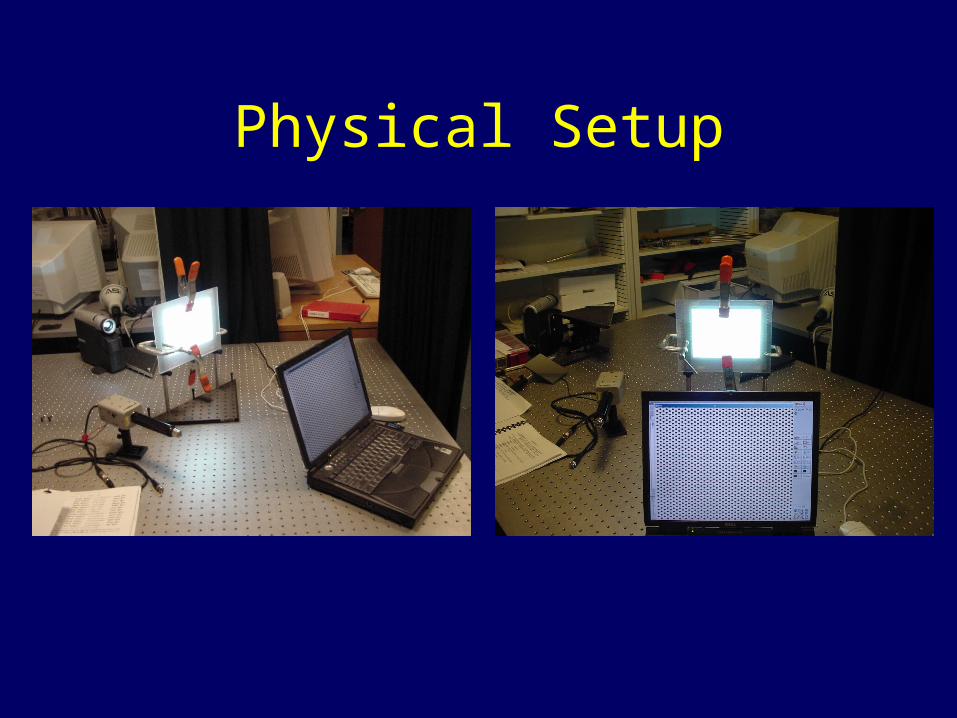
Physical Setup
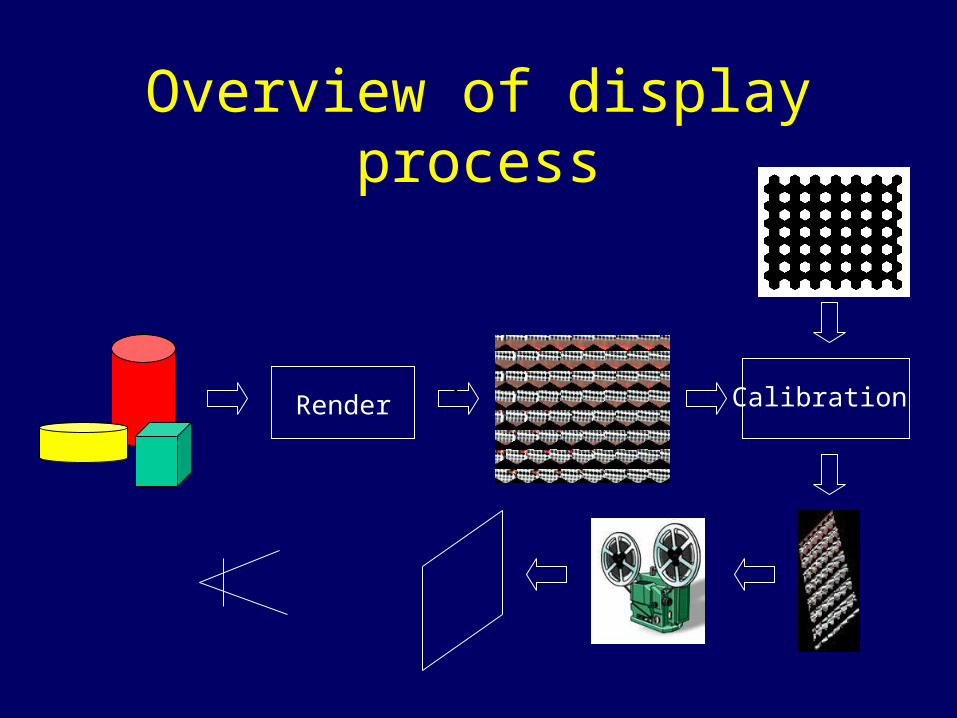
Overview of display process
Render ` Calibration
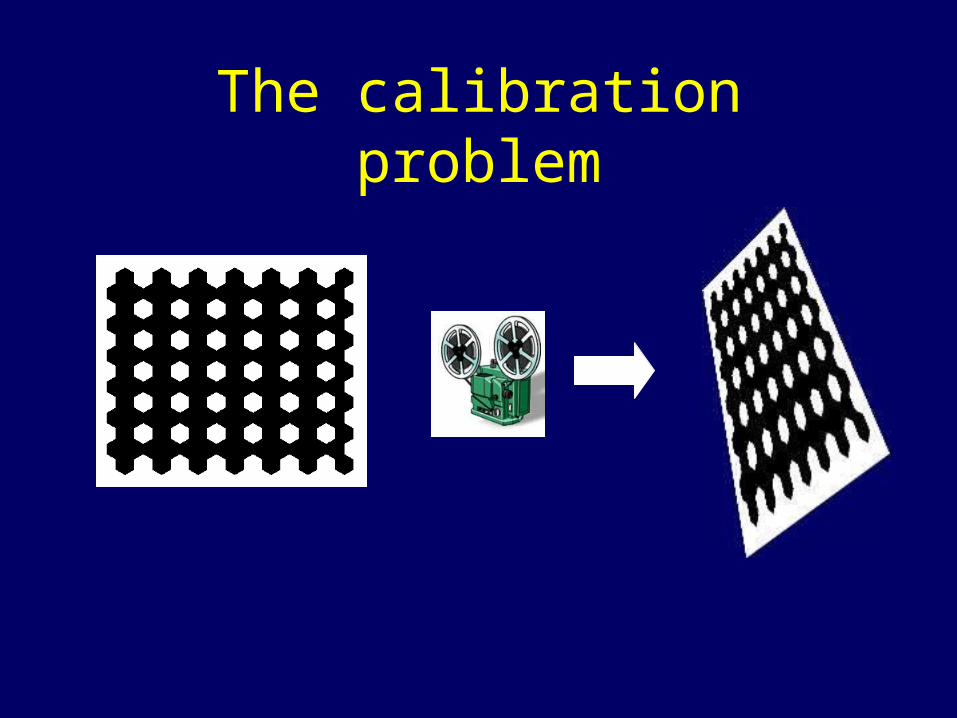
The calibration problem
+
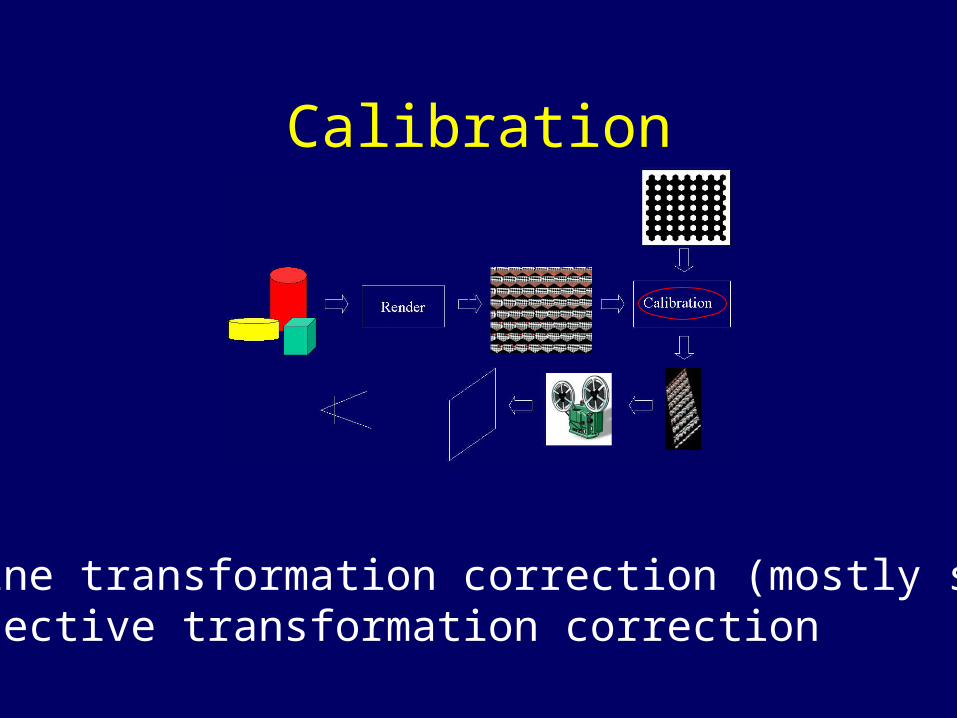
Calibration
• affine transformation correction (mostly scale)• projective transformation correction
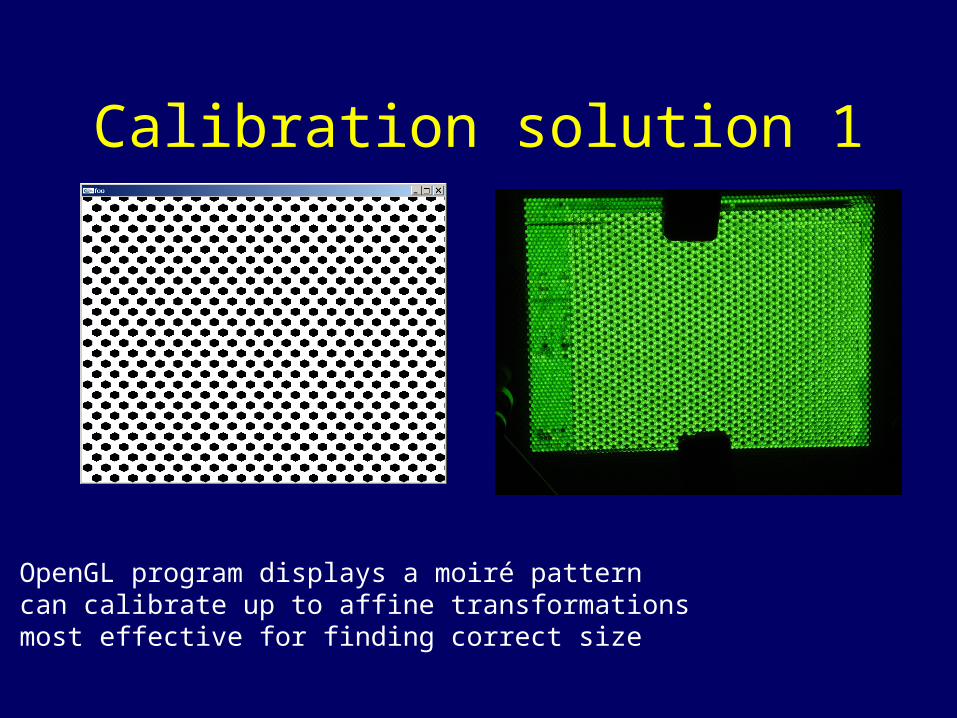
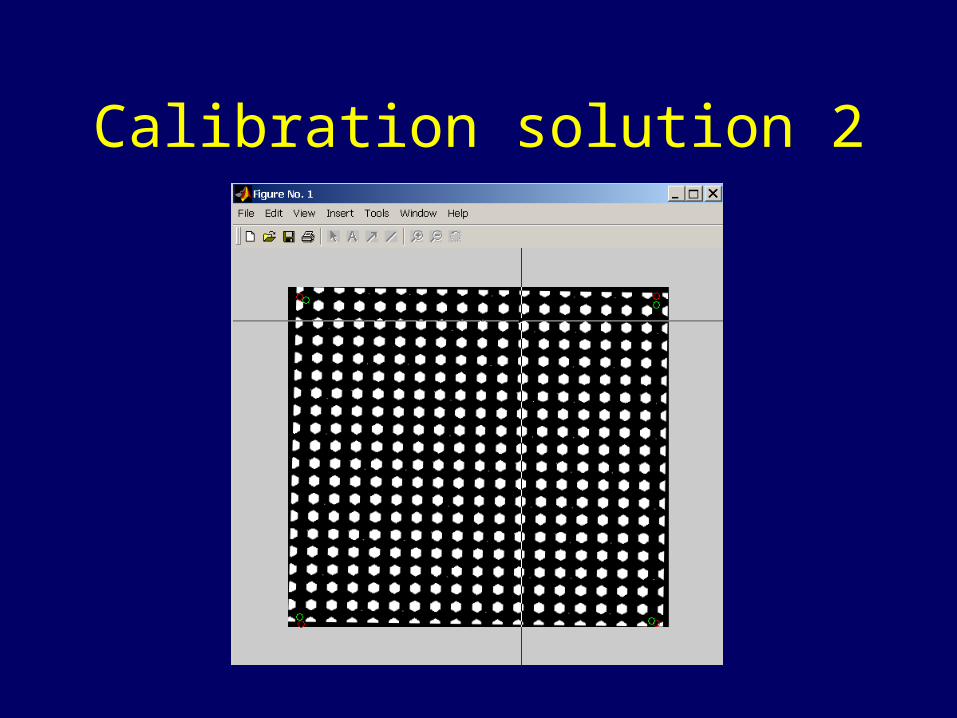
Calibration solution 1
• OpenGL program displays a moiré pattern• can calibrate up to affine transformations• most effective for finding correct size
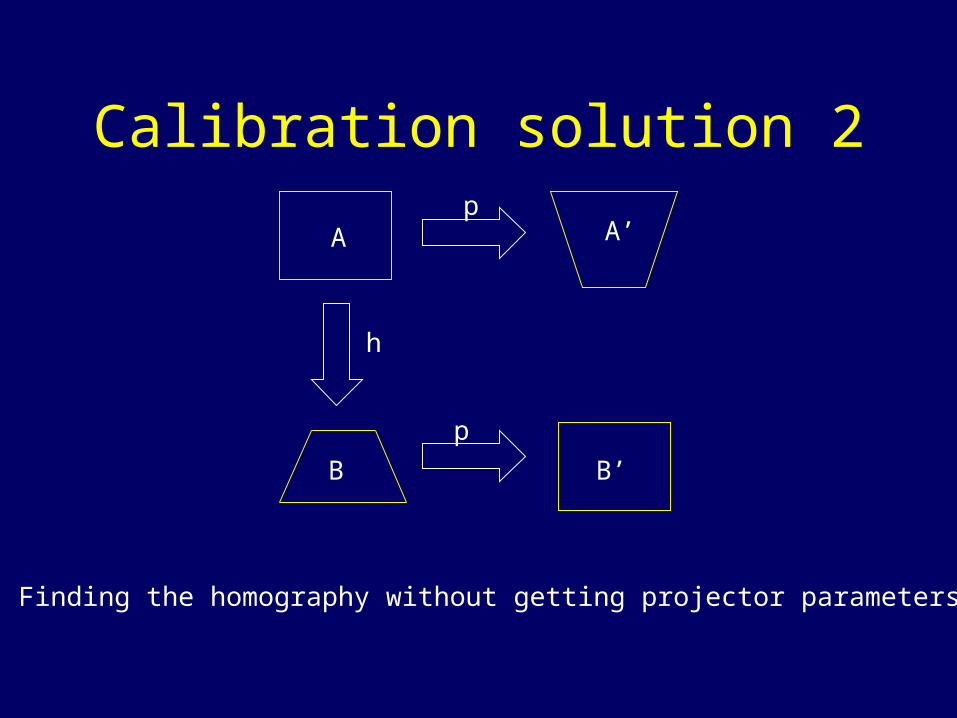
Calibration solution 2p
h
p
Finding the homography without getting projector parameters
A
B
A’
B’
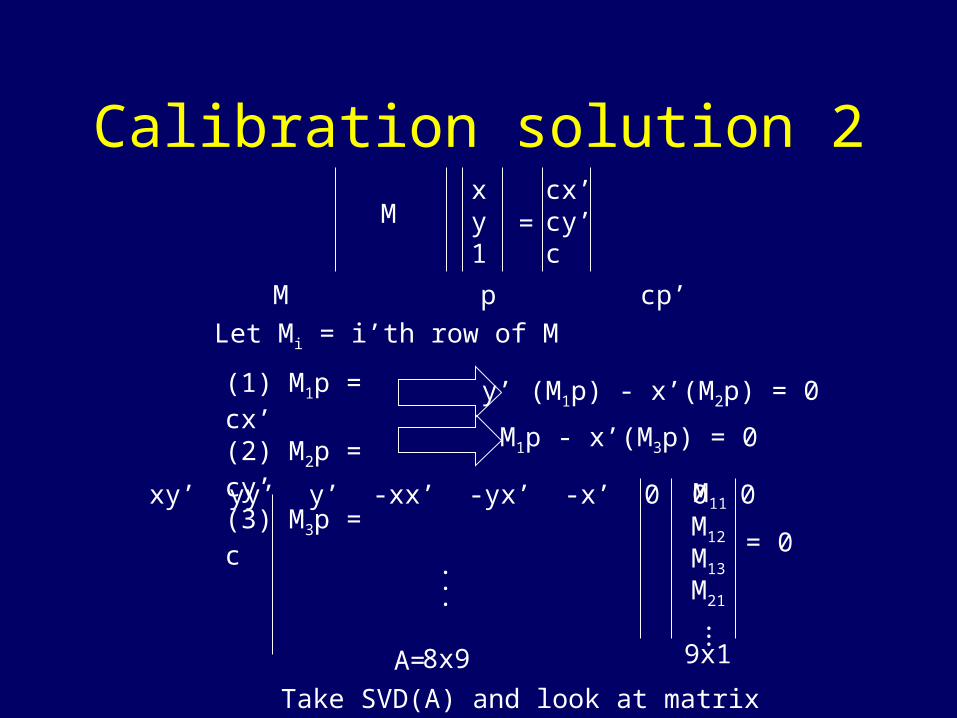
xy1
cx’cy’c
Calibration solution 2M =
M p cp’
Let Mi = i’th row of M
(1) M1p = cx’(2) M2p = cy’(3) M3p = c
y’ (M1p) - x’(M2p) = 0
M1p - x’(M3p) = 0
xy’ yy’ y’ -xx’ -yx’ -x’ 0 0 0 M11
M12
M13
M21
..
.
.
.
.
= 0
8x9 9x1A=
Take SVD(A) and look at matrix
Calibration solution 2
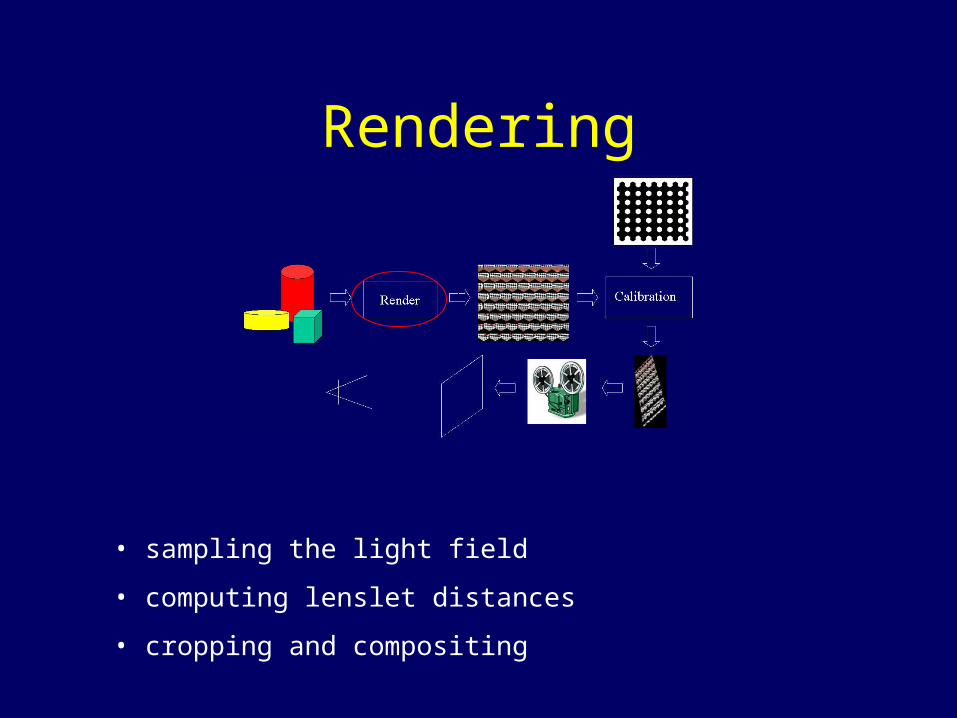
Rendering
• sampling the light field
• computing lenslet distances
• cropping and compositing
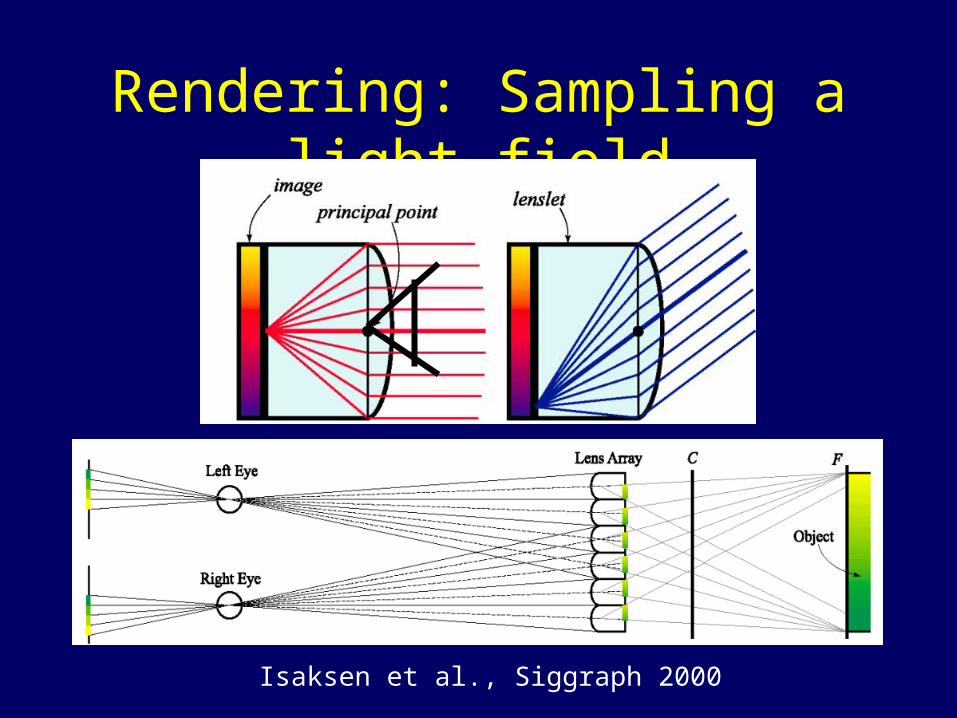
Rendering: Sampling a light field
Isaksen et al., Siggraph 2000
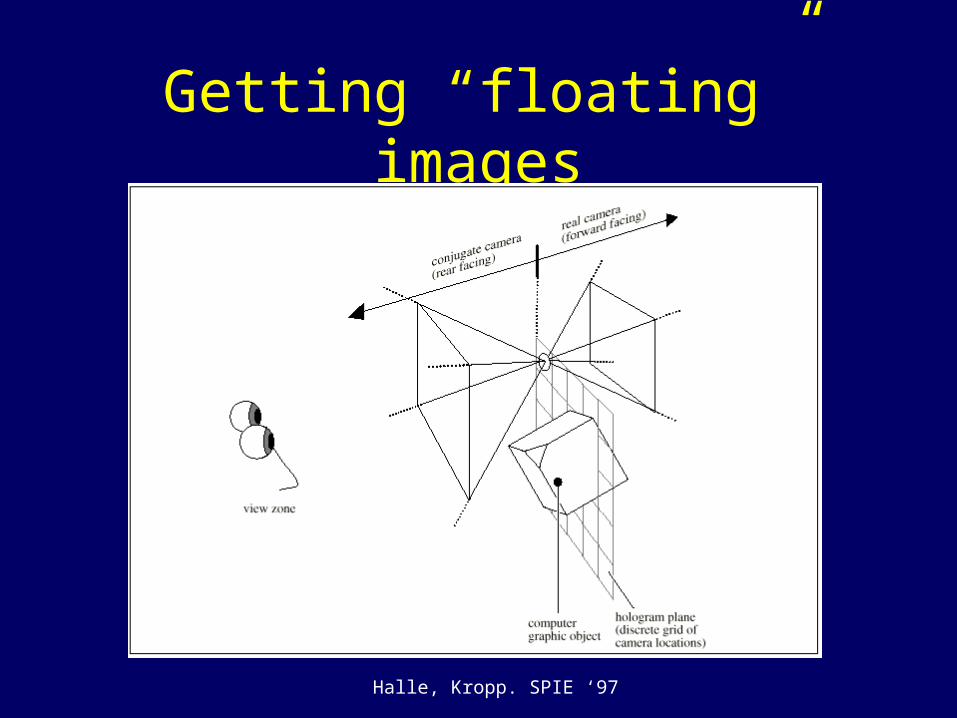
Getting “floating” images
Halle, Kropp. SPIE ‘97
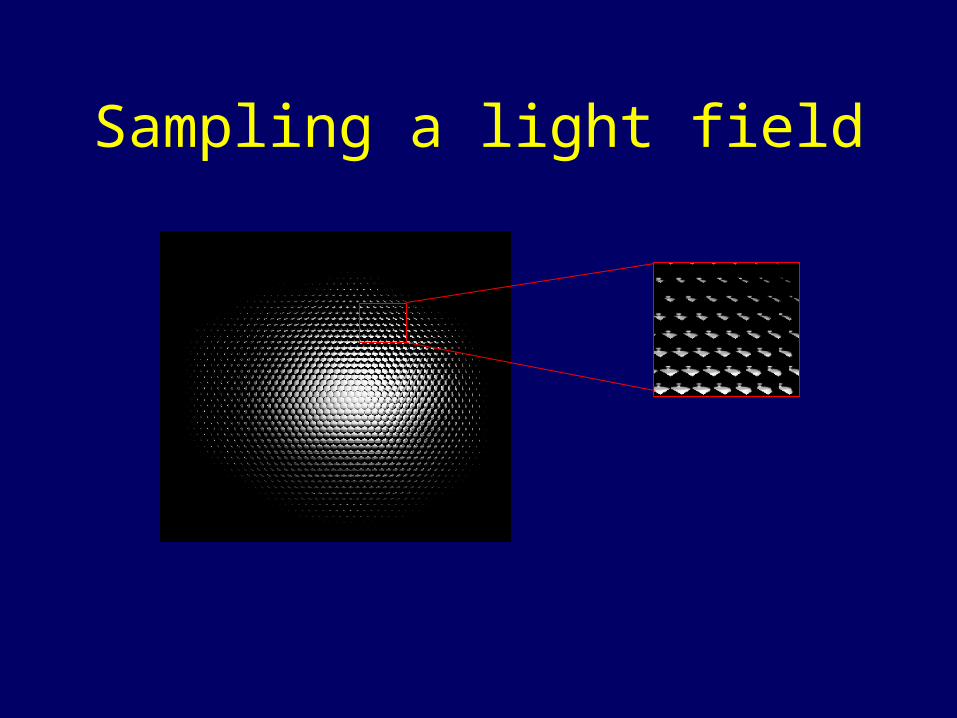
Sampling a light field
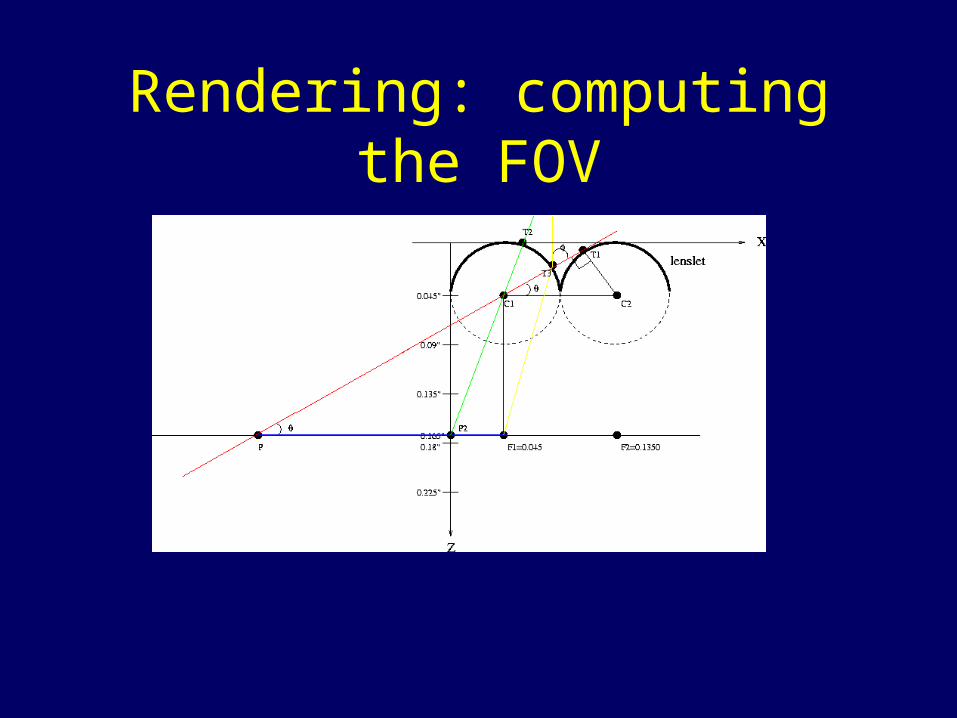
Rendering: computing the FOV
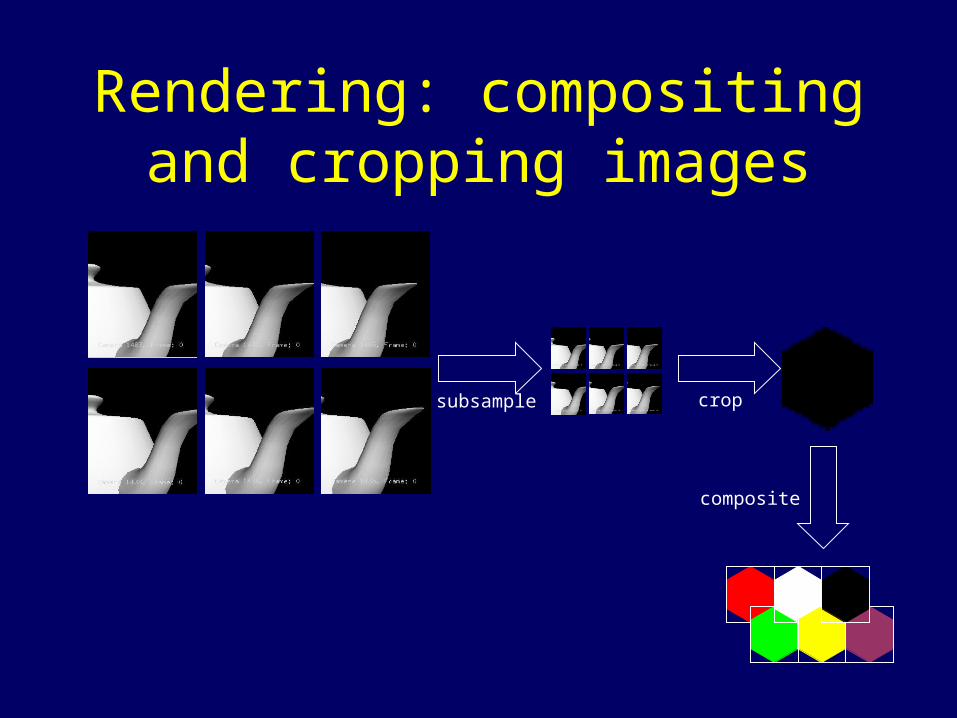
Rendering: compositing and cropping images
subsample crop
composite
Implementation Details• Fresnel hex array #300; 0.12 in. focal length, 0.12 in. thickness, .09 in. diameter• default size for a lenslet image: 26x31 pixels (for 300 dpi displays)• calibrate scale is .49 (sanity check: 300 dpi / 150 dpi)• OpenGL unit == 1 pixel (300 dpi)• SEE WEBPAGE!
Results compared to original goals
• real-time display is hard, must handle the bandwidth
• spatial resolution too small for 3D desktops
• light fields have problems with much depth complexity, but NEED depth for effective autostereoscopic displays
Future Work
• reflective display
• auto-calibration
• hardware accelerated light field sampling
• overloading pixels per direction: perspective views, displacing display pixels from focal plane
• use a light field of captured data
Acknowledgements
• calibration: Vaibhav Vaish• light field generator: Georg Petschnigg• hardware accelerated approach: Ren Ng• bootstrap: Sean Anderson







