
Autonomous Vehicles: Boundary Tracking and
Control Laws
By Jackie Brosamer
June 19, 2008
Boundary Tracking
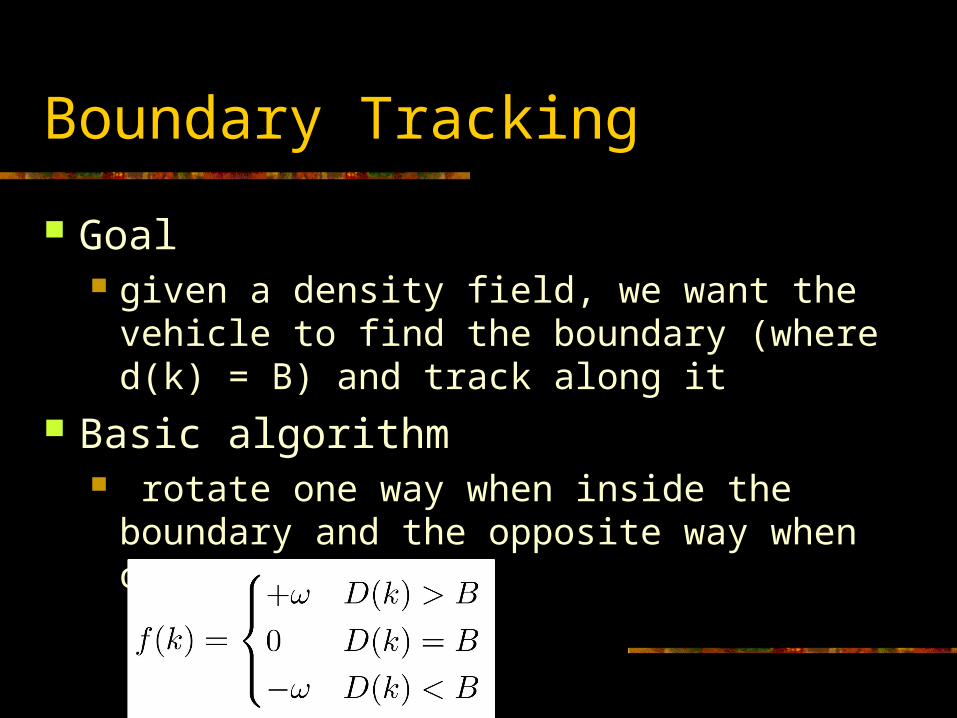
Goal given a density field, we want the vehicle to
find the boundary (where d(k) = B) and track along it
Basic algorithm rotate one way when inside the boundary
and the opposite way when outside boundary
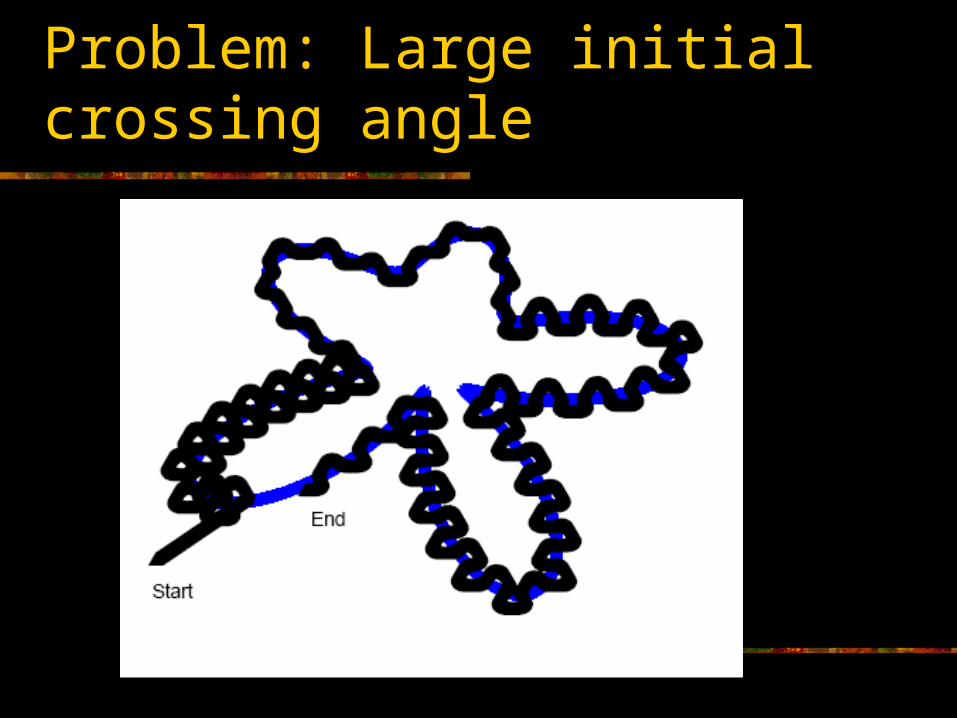
Problem: Large initial crossing angle

Solution:
We modify our algorithm based on the time it takes to cross the boundary t and a predetermined reference angle

CUSUM filter
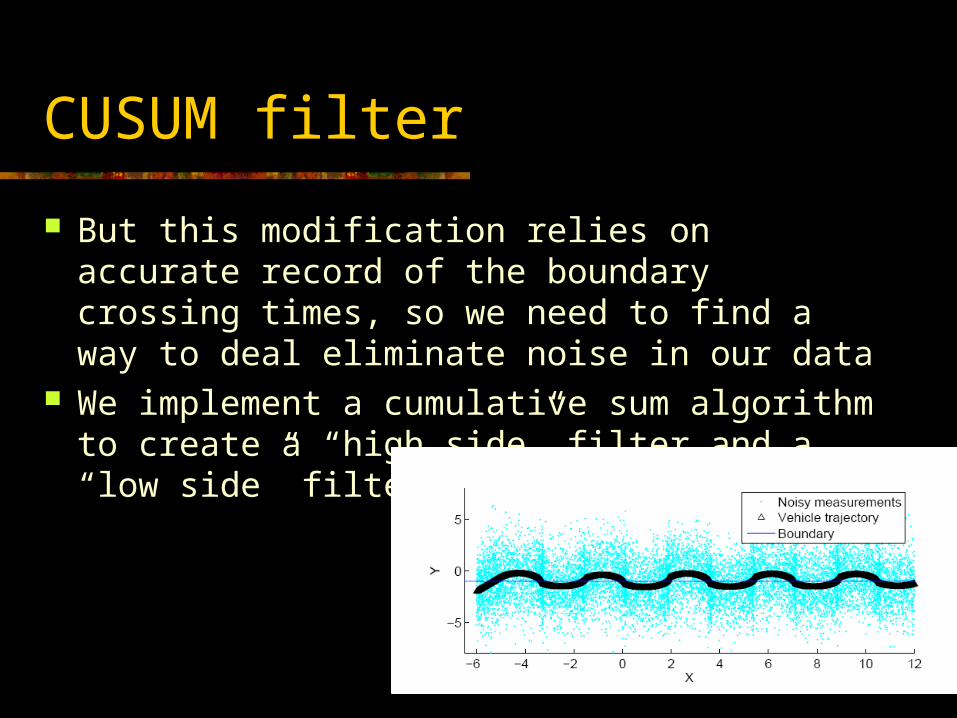
But this modification relies on accurate record of the boundary crossing times, so we need to find a way to deal eliminate noise in our data
We implement a cumulative sum algorithm to create a “high side” filter and a “low side” filter to increase accuracy

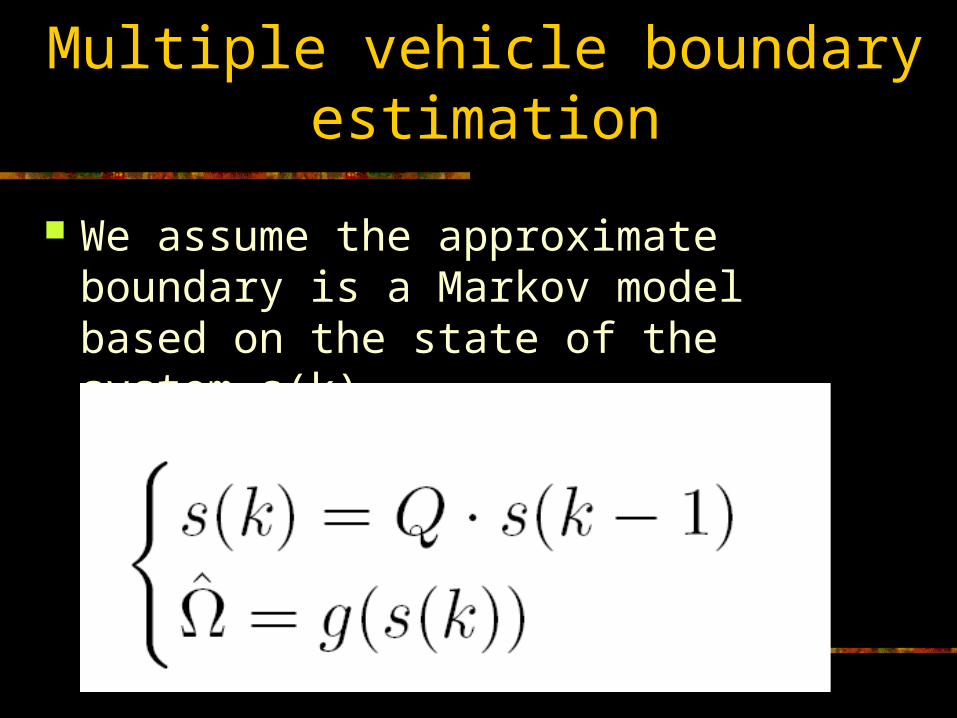
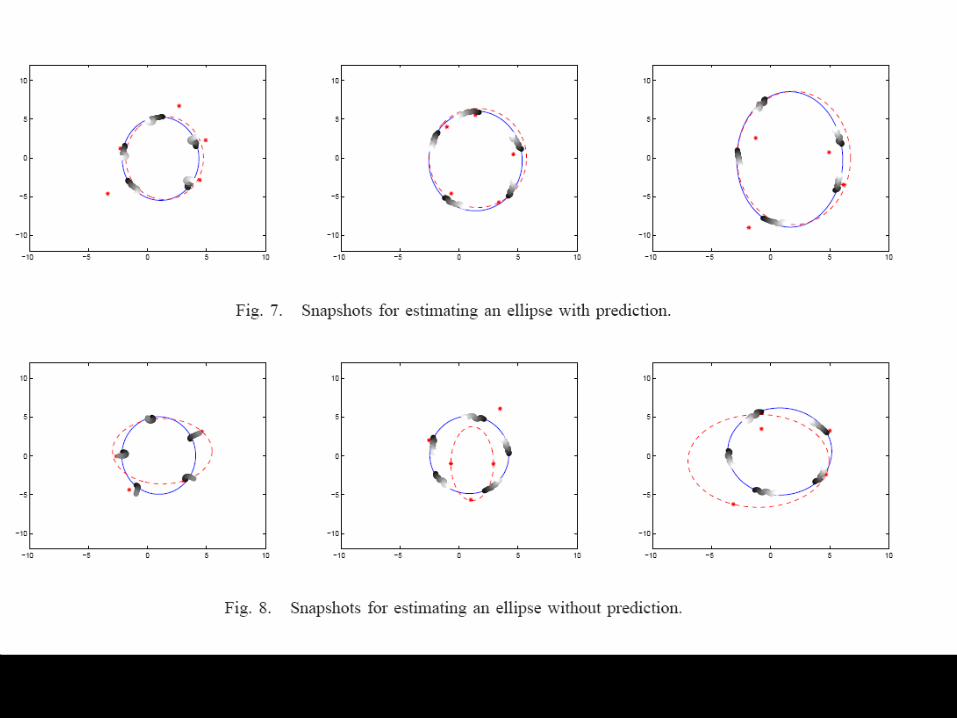
Multiple vehicle boundary estimation
We assume the approximate boundary is a Markov model based on the state of the system s(k)

Optimization
We then assume the boundary can be represented by an ellipse and formulate boundary estimation as an optimization problem
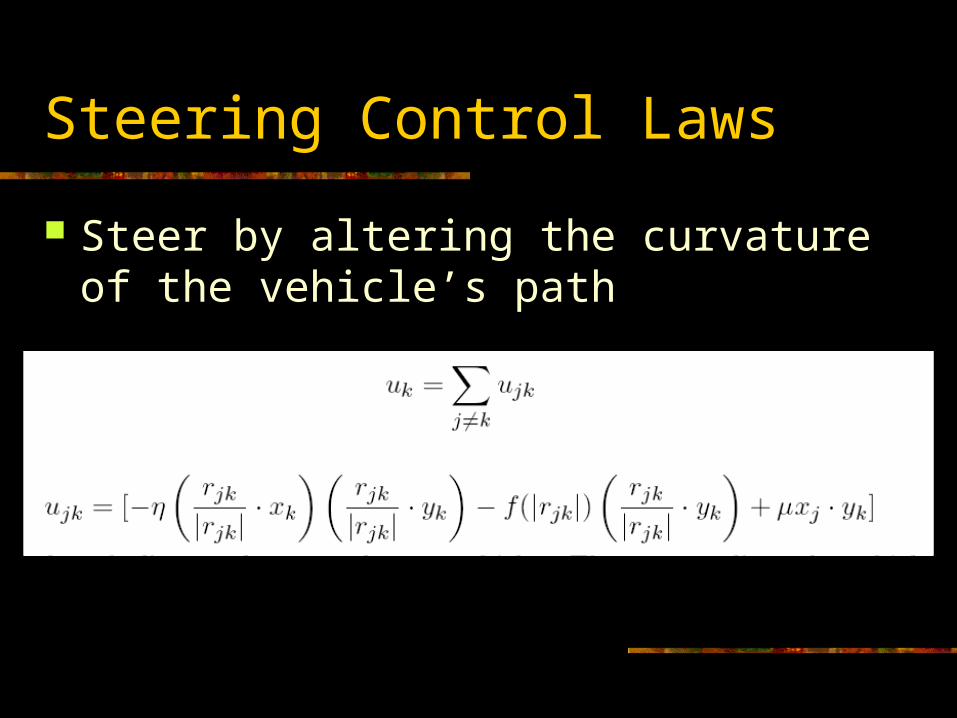
Steering Control Laws
Steer by altering the curvature of the vehicle’s path

Coupling Control Laws
Local coupling allows vehicles to follow other vehicles within their field of vision
Also, stronger coupling between a designated leader and followers

Homotopy parameter
Governs between global control law and local control law

Target Seeking
Separate control law, does not guarantee swarming
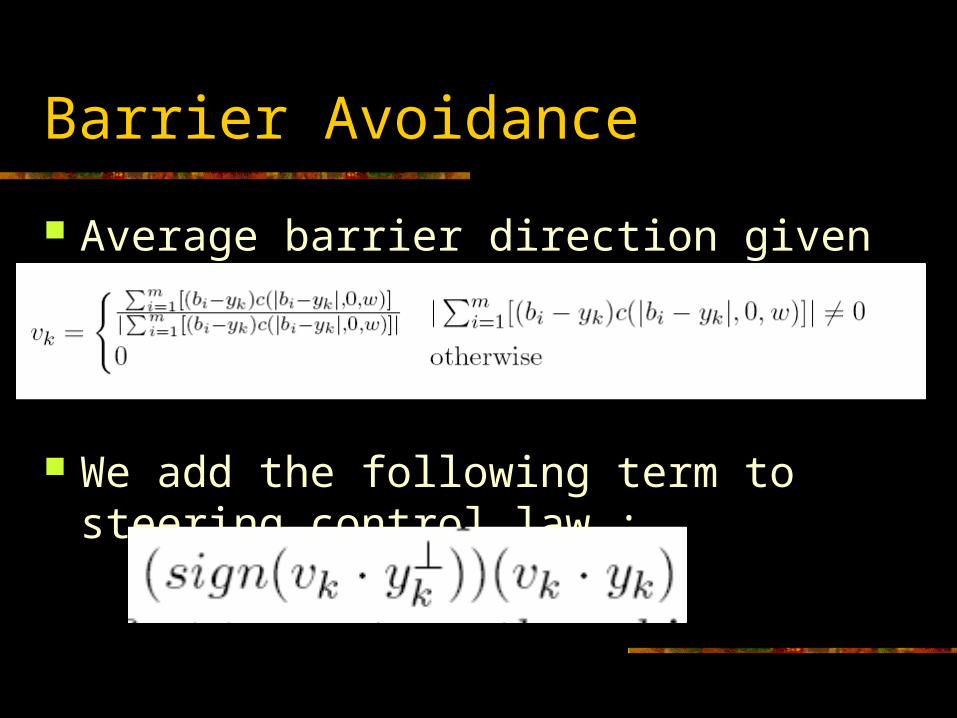
Barrier Avoidance
Average barrier direction given by:
We add the following term to steering control law :







