
Analyzing Multi-channel MAC Protocols for Underwater Sensor Networks
Presenter: Zhong Zhou

Outline
Introduction Related work System model and analysis Performance evaluation Conclusions

Introduction
Underwater sensor networks (UWSN)– Long propagation delay– High error rate
MAC protocols for UWSN– Single-channel MAC
R-MAC et. al
– Multi-channel MAC Previous work shows higher throughput

Related work
Multi-channel MAC for terrestrial networks– Multi-channel with Aloha– Multi-channel with RTS/CTS – Split phase
Multi-channel MAC for UWSN– Multi-channel with Aloha– Multi-channel with RTS/CTS
To our best knowledge, No work analyzes multi-channel MAC for UWSN !
Contributions
Analyze two generalized multi-channel protocols– Random channel allocation– RTS/CTS based channel allocation
Tight upper bound and lower bound
Comparison of Multi-channel protocols

Assumptions(1)

Assumptions(2)

Multi-channel with Aloha
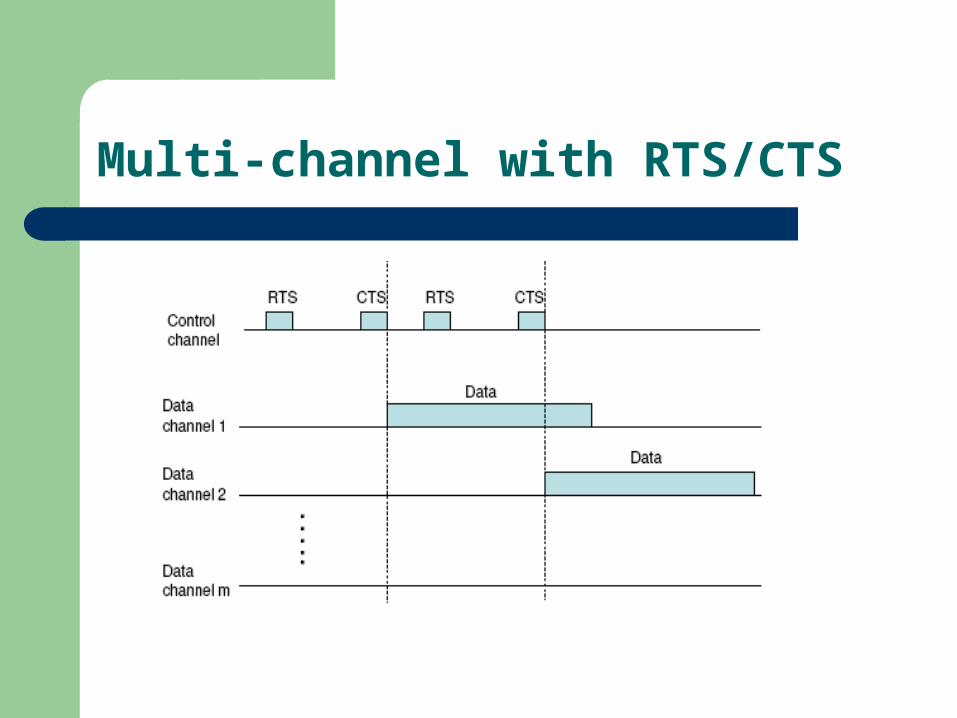
Multi-channel with RTS/CTS

Analysis for Multi-channel with Aloha
The probability of successfully transmitting a packet is

Analysis for Multi-channel with Aloha
Because the input traffic is assumed to be a poisson process for every node

Analysis for Multi-channel with Aloha
And then, we can get

Analysis for Multi-channel with Aloha

Analysis for Multi-channel with Aloha
Optimal bandwidth allocation between control and data channel can be written as:
And we can get:

Analysis for Multi-channel with RTS/CTS
Analyzing the control channel– Previous work shows that the completion time of s
uccessfully RTS/CTS exchanged can be accurately modeled by a poisson process
Its collision probability can be written as :
The net traffic to the data channels is :
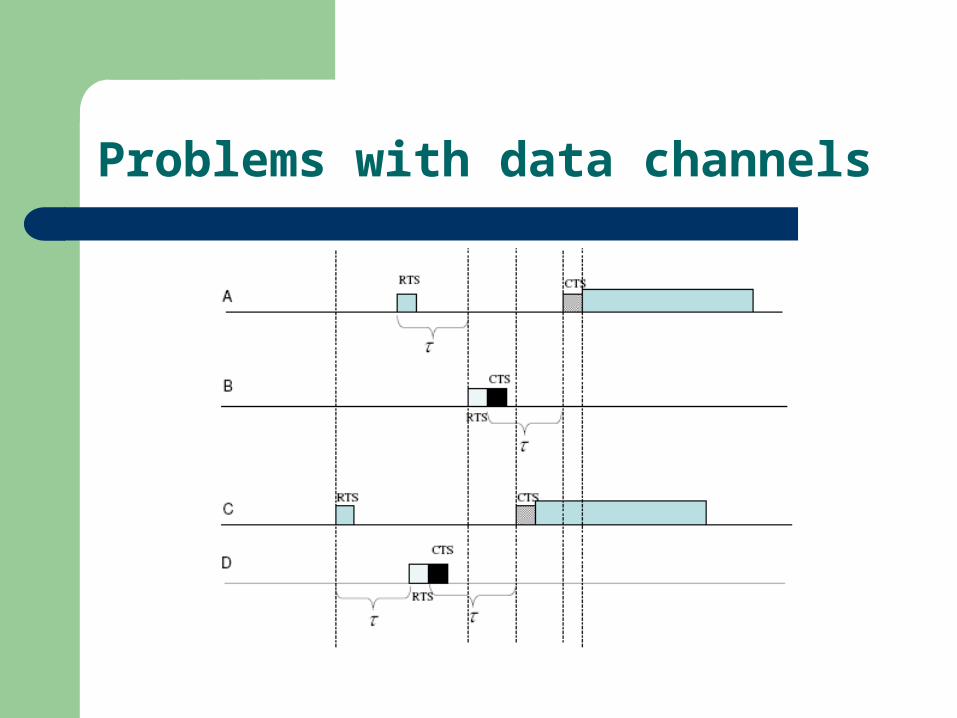
Problems with data channels
Analyzing the data channels
Markov chain can no longer model the system as it does in the terrestrial networks
Three stochastic processes interacts – Packet arriving process– Channel allocation process– Packet leaving process
Instead of investigating the system itself, we try to find its upper bound and lower bound!

Basic virtual system (1)
We discrete the system and confine the collision to every 2t area

Basic virtual system (2)
The lengths of the collision region for every packet in both systems are same. since the input is the same poisson process, the performance of these two system are the same
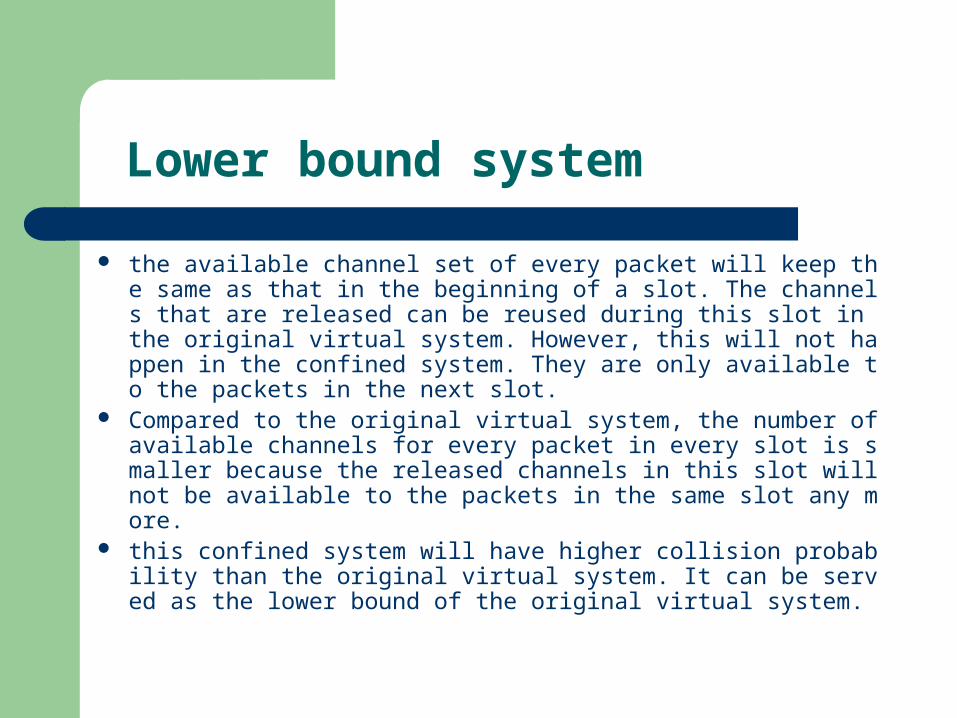
Lower bound system
the available channel set of every packet will keep the same as that in the beginning of a slot. The channels that are released can be reused during this slot in the original virtual system. However, this will not happen in the confined system. They are only available to the packets in the next slot.
Compared to the original virtual system, the number of available channels for every packet in every slot is smaller because the released channels in this slot will not be available to the packets in the same slot any more.
this confined system will have higher collision probability than the original virtual system. It can be served as the lower bound of the original virtual system.
Upper bound system
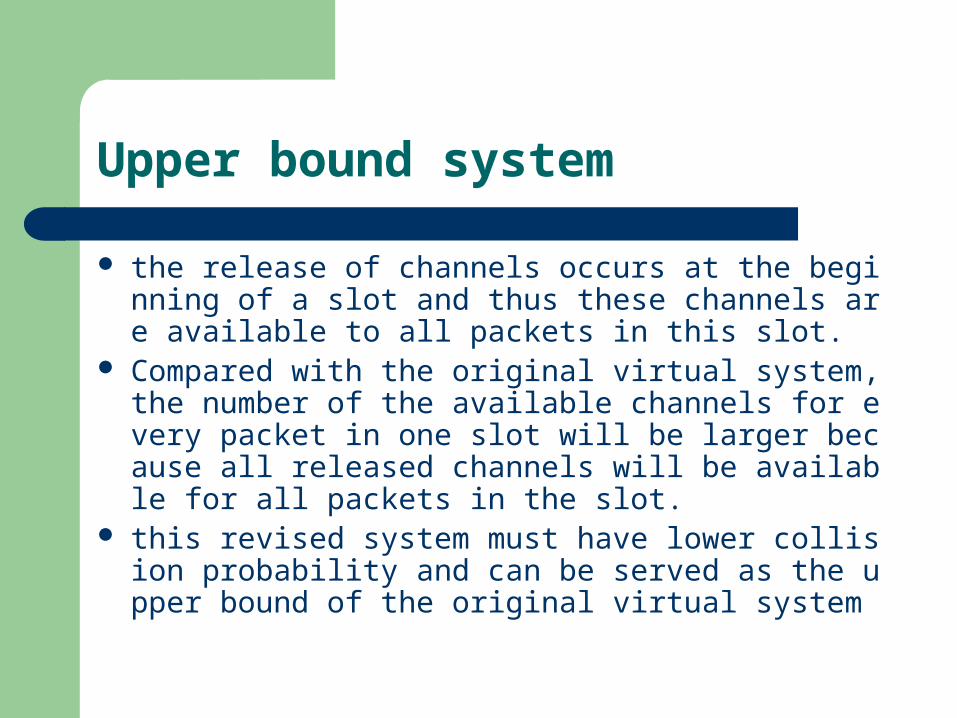
the release of channels occurs at the beginning of a slot and thus these channels are available to all packets in this slot.
Compared with the original virtual system, the number of the available channels for every packet in one slot will be larger because all released channels will be available for all packets in the slot.
this revised system must have lower collision probability and can be served as the upper bound of the original virtual system

Solving upper bound and lower bound systems
The upper bound and lower bound systems can be accurately modeled by Markov chain and we can calculate its performance

Performance evaluation
Simulation setting– Fully connected network with 50 nodes– Propagation delay : 0.3s– Data packet: 200 bytes– Control packet: 10bytes– Data channels: 16.– Overall bandwidth: 17kbps

Simulation results
Optimal bandwidth for multi-channel with Aloha

Upper bound and lower bound

Comparisons
Effects of number of channels

Effects of input traffic
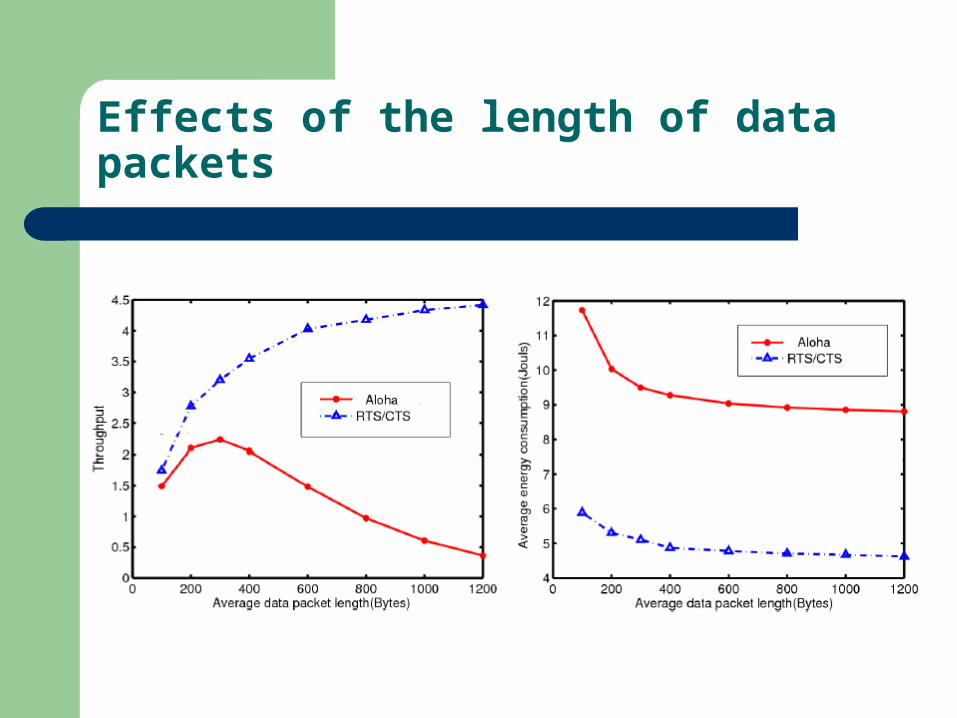
Effects of the length of data packets

Effects of propagation delay

Conclusions
We analyze two general multi-channel protocols for UWSN
We compare these two protocols with different network parameters
Simulation results show that our theoretical result are quite accurate

Future work
Explore more complicated multi-channel MAC protocols
Investigate multi-channel protocols in multi-hop UWSN environments.
![STI Group Discussion/Written Project Proventia is also capable of analyzing multiple protocols including HTTP, SMTP and several instant messaging protocols.[7] It can also look inside](https://cdn.vdocuments.us/doc/165x107/5b18595b7f8b9a37258bd23f/sti-group-discussionwritten-project-proventia-is-also-capable-of-analyzing-multiple.jpg)






