
TheTibshiranisRyanTibshirani

Outline
• Roadmapofourseminar onconvexoptimization• Motivatingexamples• Sumofnormsregularization
• Dual(sub)gradientmethods• Dualdecomposition• AugmentedLagrangian• ADMM

Roadmapofourseminar
• Firstordermethods• Stochasticgradientdescent• Batchgradientdescent• Subgradient• Projectedgradientdescent
• Secondordermethods• Newton’smethod• ProximalNewtonmethod(BFGS)• Barriermethod
• Dualitytheory• Duality• KKT• ADMM

Motivatingexamples
• Goals• Anumberofavailabletools.Howtochoose?• Thenecessityofdualmethods• InspireADMM
• Howtochooseamethodinpractice• Assumptionsoncriterionfunction• Assumptionsonconstraintfunctions/set• Easeofimplementation(howtochooseparameters?)• Costofeachiteration• Numberofiterationsneeded

Sum of norms regularization
We will consider problems of the form
min
�f(�) + �
JX
j=1
kDj�kqj
where f : Rp ! R is a smooth, convex function, Dj 2 Rmj⇥p is apenalty matrix, qj � 1 is a norm parameter, for j = 1, . . . J . Also,� � 0 is a regularization parameter
An obvious special case: the lasso fits into this framework, with
f(�) = ky � X�k22
and J = 1, D = I, q = 1. To include an unpenalized intercept, wejust add a column of zeros to D
4

Fused lasso or total variation denoising, 1d
Special case: fused lasso or total variation denoising in 1d, whereJ = 1, q = 1, and
D =
2
6664
�1 1 0 . . . 0 0
0 �1 1 . . . 0 0
...0 0 0 . . . �1 1
3
7775, so kD�k1 =
n�1X
i=1
|�i � �i+1|
Now we obtain sparsity in adjacent di↵erences ˆ�i � ˆ�i+1, i.e., weobtain ˆ�i =
ˆ�i+1 at many locations i
Hence, plotted in order of the locations i = 1, . . . n, the solution ˆ�appears piecewise constant
6

Typically used in “signal approximator” settings, where ˆ� estimates(say) the mean of some observations y 2 Rn directly. Examples:
Gaussian loss Logistic lossf(�) =
12
Pni=1(yi � �i)
2 f(�) =
Pni=1(�yi�i + log(1 + e�i
))
●
●
●
●
●●●
●
●
●
●
●
●
●●
●●●
●●
●
●
●
●●
●
●
●
●
●
●
●
●
●●
●
●
●
●●
●●
●●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●●
●
●
●
●●
●
●
●●
●
●●
●
●
●
●
●
●
●●
●
0 20 40 60 80 100
−2−1
01
2
●
●●●
●
●
●●
●●●●●●●●●●
●
●
●●●●●●●
●
●●●●●●●●●●●●●●●●●●●
●
●●●●●●
●●●●
●●
●●●●●●●●●●●●●●●●●●●●
●●●●●●●●●●●●
●
●●●●●●●
0 20 40 60 80 100
0.0
0.2
0.4
0.6
0.8
1.0
7

Fused lasso or total variation denoising, graphs
Special case: fused lasso or total variation denoising over a graph,G = ({1, . . . n}, E). Here D is |E| ⇥ n, and if e` = (i, j), then Dhas `th row
D` = (0, . . . �1
"i
, . . . 1"j
, . . . 0)
sokD�k1 =
X
(i,j)2E
|�i � �j |
Now at the solution, we get ˆ�i =
ˆ�j
across many edges (i, j) 2 E, so ˆ� ispiecewise constant over the graph G
8

Example: Gaussian loss, f(�) =
12
Pni=1(yi � �i)
2, 2d grid graph3
45
67
Data (noisy image) Solution (denoised image)
9

Example: Gaussian loss, f(�) =
12
Pni=1(yi � �i)
2, Chicago graph
Data (observed crime rates) Solution (estimated crime rates)
10
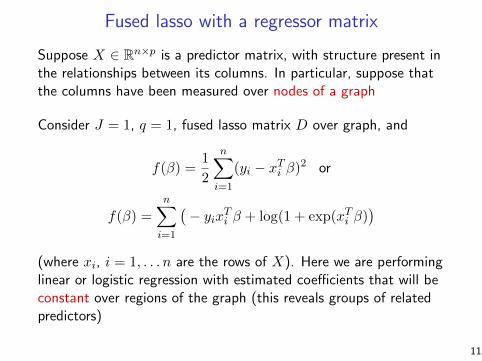
Fused lasso with a regressor matrix
Suppose X 2 Rn⇥p is a predictor matrix, with structure present inthe relationships between its columns. In particular, suppose thatthe columns have been measured over nodes of a graph
Consider J = 1, q = 1, fused lasso matrix D over graph, and
f(�) =
1
2
nX
i=1
(yi � xTi �)
2 or
f(�) =
nX
i=1
�� yix
Ti � + log(1 + exp(xT
i �)
�
(where xi, i = 1, . . . n are the rows of X). Here we are performinglinear or logistic regression with estimated coe�cients that will beconstant over regions of the graph (this reveals groups of relatedpredictors)
11

(a) fold 1 (b) fold 3 (c) fold 5 (d) fold 7 (e) fold 9 (f) overlap
Figure 4: Consistency of selected voxels in different trials of cross-validations. The results of 5 different folds of cross-validations are shownin (a)-(e) and the overlapping voxels in all 10 folds are shown in (f). The top row shows the results for GFL and the bottom row shows theresults for L1. The percentages of the overlapping voxels were: GFL(66%) vs. L1(22%).
Table 1: Comparison of the accuracy of AD classification.
Task LR SVM LR+L1 LR+GFLAD/NC 80.45% 82.71% 81.20% 84.21%
MCI 63.83% 67.38% 68.79% 70.92%
We compared GFL to logistic regression (LR), supportvector machine (SVM), and logistic regression with anL1 regularizer. The classification accuracies obtained basedon a 10-fold cross validation (CV) are shown in Table 1,which shows that GFL yields the highest accuracy in bothtasks. Furthermore, compared with other reported results,our performance are comparable with the state-of-the-art.In (Cheng, Zhang, and Shen 2012), the best performancewith MCI tasks is 69.4% but our method reached 70.92%.In (Chu et al. 2012), a similar sample size is used as in ourexperiments, the performance of our method with ADNCtasks is comparable to or better than their reported results(84.21% vs. 81-84%) whereas our performance with MCItasks is much better (70.92% vs. 65%).
We applied GFL to all the samples where the optimal pa-rameter settings were determined by cross-validation. Figure5 compares the selected voxels with non-structured sparsity(i.e. L1), which shows that the voxels selected by GFL clus-tered into several spatially connected regions, whereas thevoxels selected by L1 were more scattered. We consideredthe voxels that corresponded to the top 50 negative �i’s asthe most atrophied voxels and projected them onto a slice.The results show that the voxels selected by GFL were con-centrated in hippocampus, parahippocampal gyrus, whichare believed to be the regions with early damage that areassociated with AD. By contrast, L1 selected either less crit-ical voxels or noisy voxels, which were not in the regionswith early damage (see Figure 5(b) and 5(c) for details).The voxels selected by GFL were also much more consistentthan those selected by L1, where the percentages of overlap-ping voxels according to the 10-fold cross-validation were:
(a) (b) (c)
Figure 5: Comparison of GFL and L1. The top row shows theselected voxels in a 3D brain model, the middle row shows thetop 50 atrophied voxels, and the bottom row shows the projec-tion onto a brain slice. (a) GFL (accuracy=84.21%); (b) L1 (ac-curacy=81.20%); (c) L1 (similar number of voxels as in GFL).
GFL=66% vs. L1=22%, as shown in Figure 4.
ConclusionsIn this study, we proposed an efficient and scalable algo-rithm for GFL. We demonstrated that the proposed algo-rithm performs significantly better than existing algorithms.By exploiting the efficiency and scalability of the proposedalgorithm, we formulated the diagnosis of AD as GFL. Ourevaluations showed that GFL delivered state-of-the-art clas-sification accuracy and the selected critical voxels were wellstructured.
2168
(From Xin et al. (2014), “E�cient generalized fused lasso and itsapplication to the diagnosis of Alzheimer’s disease”)
12

Algorithms for the fused lasso
Let’s go through our toolset, to figure out how to solve
min
�f(�) + �kD�k1
Subgradient method: subgradient of criterion is
g = rf(�) + �DT�
where � 2 @kxk1 evaluated at x = D�, i.e.,
�i 2(
{sign
�(D�)i
�} if (D�)i 6= 0
[�1, 1] if (D�)i = 0
, i = 1, . . . m
Downside (as usual) is that convergence is slow. Upside is that g iseasy to compute (provided rf is): if S = supp(D�), then we let
g = rf(�) + �X
i2Ssign
�(D�)i
�· Di
13

Proximal gradient descent: prox operator is
proxt(�) = argmin
z
1
2tk� � zk22 + �kDzk1
This is not easy for a general di↵erence operator D (compare thisto soft-thresholding, if D = I). Prox itself is the fused lasso signalapproximator problem, with a Gaussian loss!
Could try reparametrizing the term kD�k1 to make it linear, whileintroducing inequality constraints. We could then apply an interiorpoint method
But we will have better luck going to the dual problem. (In fact, itis never a bad idea to look at the dual problem, even if you have agood approach for the primal problem!)
14

Fused lasso dual problem
Our problems are
Primal : min
�f(�) + �kD�k1
Dual : min
uf⇤
(�DTu) subject to kuk1 �
Here f⇤ is the conjugate of f . Note that u 2 Rm (where m is thenumber of rows of D) while � 2 Rn
The primal and dual solutions ˆ�, u are linked by KKT conditions:
rf(
ˆ�) + DT u = 0, and
ui 2
8><
>:
{�} if (D ˆ�)i > 0
{��} if (D ˆ�)i < 0
[��, �] if (D ˆ�)i = 0
, i = 1, . . . m
Second property implies that: ui 2 (��, �) =) (D ˆ�)i = 0
15

Let’s go through our toolset, to think about solving dual problem
min
uf⇤
(�DTu) subject to kuk1 �
Note the eventually we’ll need to solve rf(
ˆ�) = �DT u for primalsolution, and tractability of this depends on f
Proximal gradient descent: looks much better now, because prox is
proxt(u) = argmin
z
1
2tku � zk22 subject to kzk1 �
is easy. This is projection onto a box [��, �]
m, i.e., prox returns zwith
zi =
8><
>:
� if ui > �
�� if ui < ��
ui if ui 2 [��, �]
, i = 1, . . . m
16

Interior point method: rewrite dual problem as
min
uf⇤
(�DTu) subject to �� ui �, i = 1, . . . m
These are just linear constraints, so we can easily form log barrier1
as inmin
ut · f⇤
(�DTu) + �(u)
where
�(u) = �mX
i=1
�log(� � ui) + log(ui + �)
�
We either solve above problem with Newton’s method, or take oneNewton step, and then increase t
How e�cient are Newton updates?
1There could be extra constraints from the domain of f⇤
, e.g., this happens
when f is the logistic loss, so these add extra log barrier terms
17

Define the barrier-smoothed dual criterion function
F (u) = tf⇤(�DTu) + �(u)
Newton updates follow direction H�1g, where
g = rF (u) = �t · D�rf⇤
(�DTu)
�+ r�(u)
H = r2F (u) = t · D�r2f⇤
(�DTu)
�DT
+ r2�(u)
How di�cult is it to solve a linear system in H?
• First term: if Hessian of the loss term r2f⇤(v) is structured,
and D is structured, then often Dr2f⇤(v)DT is structured
• Second term: Hessian of log barrier term r2�(u) is diagonal
So it really depends critically on first term, i.e., on conjugate lossf⇤ and penalty matrix D
18

Putting it all together:
• Primal subgradient method: iterations are cheap (we sum uprows of D over active set S), but convergence is slow
• Primal proximal gradient: iterations involve evaluating
proxt(�) = argmin
z
1
2tk� � zk22 + �kDzk1
which can be very expensive, convergence is medium
• Dual proximal gradient: iterations involve projecting onto abox, so very cheap, convergence is medium
• Dual interior point method: iterations involve a solving linearHx = g system in
H = t · D�r2f⇤
(�DTu)
�DT
+ r2�(u)
which may or may not be expensive, convergence is rapid
19
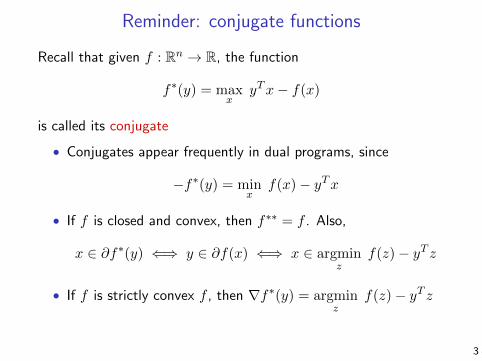
Reminder: conjugate functions
Recall that given f : Rn ! R, the function
f⇤(y) = max
x
yTx� f(x)
is called its conjugate
• Conjugates appear frequently in dual programs, since
�f⇤(y) = min
x
f(x)� yTx
• If f is closed and convex, then f⇤⇤= f . Also,
x 2 @f⇤(y) () y 2 @f(x) () x 2 argmin
z
f(z)� yT z
• If f is strictly convex f , then rf⇤(y) = argmin
z
f(z)� yT z
3

Dual (sub)gradient methods
What if we can’t derive dual (conjugate) in closed form, but wantto utilize dual relationship? Turns out we can still use dual-basedsubradient or gradient methods
Example: consider the problem
min
x
f(x) subject to Ax = b
Its dual problem is
max
u
�f⇤(�ATu)� bTu
where f⇤ is conjugate of f . Defining g(u) = f⇤(�ATu), note that
@g(u) = �A@f⇤(�ATu), and recall
x 2 @f⇤(�ATu) () x 2 argmin
z
f(z) + uTAz
5

Therefore the dual subgradient method (for maximizing the dualobjective) starts with an initial dual guess u(0), and repeats fork = 1, 2, 3, . . .
x(k) 2 argmin
x
f(x) + (u(k�1))
TAx
u(k) = u(k�1)+ t
k
(Ax(k) � b)
where tk
are step sizes, chosen in standard ways
Recall that if f is strictly convex, then f⇤ is di↵erentiable, and sowe get dual gradient ascent, which repeats for k = 1, 2, 3, . . .
x(k) = argmin
x
f(x) + (u(k�1))
TAx
u(k) = u(k�1)+ t
k
(Ax(k) � b)
(di↵erence is that each x(k) is unique, here). Proximal gradientsand acceleration carry through in similar manner
6

Covergence analysis
First recall that if f strongly convex with parameter d, then rf⇤
Lipschitz with parameter 1/d
Proof: if f strongly convex and x is its minimizer, then
f(y) � f(x) +d
2
ky � xk2, for all y
Hence defining xu
= rf⇤(u), x
v
= rf⇤(v),
f(xv
)� uTxv
� f(xu
)� uTxu
+
d
2
kxu
� xv
k22
f(xu
)� vTxu
� f(xv
)� vTxv
+
d
2
kxu
� xv
k22
Adding these together, using Cauchy-Schwartz, and rearrangingshows that
kxu
� xv
k2 1
d· ku� vk2
7

Applying what we know about gradient descent: if f is stronglyconvex with parameter d, then dual gradient ascent with constantstep size t
k
d converges at rate O(1/✏)
Is this a slow or fast rate, compared to what we would get out ofprimal gradient descent? It’s actually essentially the same
• When f is strongly convex, primal gradient descent convergesat rate O(1/✏). But if we further assume that rf is Lipschitz,then we get the linear rate O(log(1/✏))
• Note: the converse of the statement on the last slide is alsotrue: rf⇤ being Lipschitz with parameter 1/d implies that fis strongly convex with parameter d
• Hence assume f⇤⇤= f . When f has Lipschitz gradient and is
strongly convex, the same is true about f⇤, and dual gradientascent also converges at the linear rate O(log(1/✏))
8

Dual decomposition
Consider
min
x
BX
i=1
fi
(xi
) subject to Ax = b
Here x = (x1, . . . xB) 2 Rn divides into B blocks of variables, witheach x
i
2 Rni . We can also partition A accordingly
A = [A1, . . . AB
], where Ai
2 Rm⇥ni
Simple but powerful observation, in calculation of (sub)gradient:
x+ 2 argmin
x
BX
i=1
fi
(xi
) + uTAx
() x+i
2 argmin
xi
fi
(xi
) + uTAi
xi
, i = 1, . . . B
i.e., minimization decomposes into B separate problems
9

Dual decomposition algorithm: repeat for k = 1, 2, 3, . . .
x(k)i
2 argmin
xi
fi
(xi
) + (u(k�1))
TAi
xi
, i = 1, . . . B
u(k) = u(k�1)+ t
k
⇣ BX
i=1
Ai
x(k)i
� b⌘
Can think of these steps as:
• Broadcast: send u to each ofthe B processors, eachoptimizes in parallel to find x
i
• Gather: collect Ai
xi
fromeach processor, update theglobal dual variable u
ux1
u x2 u x3
10

Example with inequality constraints:
min
x
BX
i=1
fi
(xi
) subject to
BX
i=1
Ai
xi
b
Dual decomposition (projected subgradient method) repeats fork = 1, 2, 3, . . .
x(k)i
2 argmin
xi
fi
(xi
) + (u(k�1))
TAi
xi
, i = 1, . . . B
v(k) = u(k�1)+ t
k
⇣ BX
i=1
Ai
x(k)i
� b⌘
u(k) = (v(k))+
where (·)+ is componentwise thresholding, (u+)i = max{0, ui
}
11

Augmented Lagrangian
Disadvantage of dual methods: require strong conditions to ensureprimal iterates converge to solutions. Convergence properties canbe improved by utilizing augmented Lagrangian. Transform primal:
min
x
f(x) +⇢
2
kAx� bk22subject to Ax = b
Clearly extra term (⇢/2) · kAx� bk22 does not change problem. Usedual gradient ascent: repeat for k = 1, 2, 3, . . .
x(k) = argmin
x
f(x) + (u(k�1))
TAx+
⇢
2
kAx� bk22
u(k) = u(k�1)+ ⇢(Ax(k) � b)
(When, e.g., A has full column rank, primal is guaranteed stronglyconvex)
13

Notice step size choice tk
= ⇢, for all k, in dual gradient ascent.Why? Since x(k) minimizes f(x) + (u(k�1)
)
TAx+
⇢
2kAx� bk22over x, we have
0 2 @f(x(k)) +AT
⇣u(k�1)
+ ⇢(Ax(k) � b)⌘
= @f(x(k)) +ATu(k)
This is the stationarity condition for the original primal problem;can show under mild conditions that Ax(k) � b approaches zero(i.e., primal iterates approach feasibility), hence in the limit KKTconditions are satisfied and x(k), u(k) approach optimality
Advantage: much better convergence properties. Disadvantage:lose decomposability! (Separability is compromised by augmentedLagrangian ...)
14

Alternating direction method of multipliers
Alternating direction method of multipliers or ADMM: the best ofboth worlds!
I.e., good convergence properties of augmented Lagrangians, alongwith decomposability
Consider minimization problem
min
x
f1(x1) + f2(x2) subject to A1x1 +A2x2 = b
As before, we augment the objective
min
x
f1(x1) + f2(x2) +⇢
2
kA1x1 +A2x2 � bk22subject to A1x1 +A2x2 = b
15

Write the augmented Lagrangian as
L⇢
(x1, x2, u) = f1(x1) + f2(x2) + uT (A1x1 +A2x2 � b) +⇢
2
kA1x1 +A2x2 � bk22
Now ADMM repeats the steps, for k = 1, 2, 3, . . .
x(k)1 = argmin
x1
L⇢
(x1, x(k�1)2 , u(k�1)
)
x(k)2 = argmin
x2
L⇢
(x(k)1 , x2, u
(k�1))
u(k) = u(k�1)+ ⇢(A1x
(k)1 +A2x
(k)2 � b)
Note that the usual method of multipliers would have replaced thefirst two steps by
(x(k)1 , x
(k)2 ) = argmin
x1,x2
L⇢
(x1, x2, u(k�1)
)
16

Convergence guarantees
Under modest assumptions on f1, f2 (these do not require A1, A2
to be full rank), the ADMM iterates satisfy, for any ⇢ > 0:
• Residual convergence: r(k) = A1x(k)1 �A2x
(k)2 � b ! 0 as
k ! 1, i.e., primal iterates approach feasibility
• Objective convergence: f1(x(k)1 ) + f2(x
(k)2 ) ! f?, where f? is
the optimal primal criterion value
• Dual convergence: u(k) ! u?, where u? is a dual solution
For details, see Boyd et al. (2010). Note that we do not genericallyget primal convergence, but this can be guaranteed under moreassumptions
Convergence rate: not known in general, theory is currently beingdeveloped, e.g., in Hong and Luo (2012), Nishihara et al. (2015).Roughly, it behaves like a first-order method (or a bit faster)
17

Scaled form
It is often easier to express the ADMM algorithm in a scaled form,where we replace the dual variable u by a scaled variable w = u/⇢.In this parametrization, the ADMM steps are
x(k)1 = argmin
x1
f1(x1) +⇢
2
kA1x1 +A2x(k�1)2 � b+ w(k�1)k22
x(k)2 = argmin
x2
f2(x2) +⇢
2
kA1x(k)1 +A2x2 � b+ w(k�1)k22
w(k)= w(k�1)
+A1x(k)1 +A2x
(k)2 � b
Note that here the kth iterate w(k) is just given by a running sumof residuals:
w(k)= w(0)
+
kX
i=1
�A1x
(i)1 +A2x
(i)2 � b
�
18

Practicalities and tricks
Practical experience shows that ADMM usually obtains a relativelyaccurate solution in a handful of iterations, but requires a verylarge number of iterations for a highly accurate solution. This ismore evidence that it behaves like a first-order method
Choice of ⇢ can greatly influence practical convergence of ADMM:
• ⇢ too large ! not enough emphasis on minimizing f1 + f2
• ⇢ too small ! not enough emphasis on feasibility
Boyd et al. (2010) give a strategy for varying ⇢ that can be usefulin practice (but does not have convergence guarantees)
Like deriving duals, transforming a problem into that ADMM canhandle often requires a bit of trickery (and di↵erent forms can leadto di↵erent algorithms)
19

Example: alternating projections
Consider finding a point in intersection of convex sets C,D ✓ Rn,i.e., solving
min
x
1
C
(x) + 1
D
(x)
To get this into ADMM form, we express it as
min
x,z
1
C
(x) + 1
D
(z) subject to x� z = 0
Each ADMM cycle involves two projections:
x(k) = argmin
x
PC
�z(k�1) � w(k�1)
�
z(k) = argmin
z
PD
�x(k) + w(k�1)
�
w(k)= w(k�1)
+ x(k) � z(k)
This is like the classical alternating projections method, but nowwith a dual variable w. It is more e�cient
20

Example: fused lasso regression
Given y 2 Rn, X 2 Rn⇥p, and a di↵erence operator D 2 Rm⇥p,the fused lasso regression problem solves
min
�2Rp
1
2
ky �X�k22 + �kD�k1
This computationally harder than the lasso problem (with D = I);recall our study on algorithms for this problem. We can rewrite as
min
�2Rp,↵2Rm
1
2
ky �X�k22 + �k↵k1 subject to D� � ↵ = 0
and ADMM gives us a simple algorithm for this problem:
�(k)= (XTX + ⇢DTD)
�1�XT y + ⇢DT
(↵(k�1) � w(k�1))
�
↵(k)= S
�/⇢
(D�(k)+ w(k�1)
)
w(k)= w(k�1)
+D�(k) � ↵(k)
21

Notes:
• The matrix XTX + ⇢DTD is assumed here to be invertible; ifnot, replace the inverse by a pseudoinverse
• If we take its factorization (say QR), in O(p3) flops, then eachsubsequent solve takes O(p2) flops
• The soft-thresolding operator St
recall is defined as
[St
(x)]j
=
8><
>:
xj
� t x > t
0 �t x t
xj
+ t x < �t
, j = 1, . . . p
• A di↵erent initial reparametrization, rather than D� = ↵, willlead to a di↵erent ADMM algorithm
• Sometimes it is more e�cient to make the substitution � = ↵in the penalty term; this is favorable when h(x) = kDxk1 hasa fast proximal operator
22

Consensus ADMM
Consider a problem of the form
min
x
BX
i=1
fi
(x)
The consensus ADMM approach begins by reparametrizing:
min
x1,...xB ,x
BX
i=1
fi
(xi
) subject to xi
= x, i = 1, . . . B
and this yields the decomposable ADMM updates:
x(k)i
= argmin
xi
fi
(xi
) +
⇢
2
kxi
� x(k�1)+ w
(k�1)i
k22, i = 1, . . . B
x(k) =1
B
BX
i=1
⇣x(k)i
+ w(k�1)i
⌘
w(k)i
= w(k�1)i
+ x(k)i
� x(k), i = 1, . . . B
25

Write x =
1B
PB
i=1 xi and similarly for other variables. Not hard to
see that w(k)= 0 for all iterations k � 1
Hence ADMM steps can be simplified, by taking x(k) = x(k):
x(k)i
= argmin
xi
fi
(xi
) +
⇢
2
kxi
� x(k�1)+ w
(k�1)i
k22, i = 1, . . . B
w(k)i
= w(k�1)i
+ x(k)i
� x(k), i = 1, . . . B
To reiterate, the xi
, i = 1, . . . B updates here are done in parallel
Intuition:
• We try to minimize each fi
(xi
), and use ridge regularizationto pull each x
i
towards the average x
• If a variable xi
is bigger than the average, then wi
is increased
• So the ridge regularization in the next step pulls xi
even closer
26

General consensus ADMM with regularization
Consider a problem of the form
min
x
BX
i=1
fi
(aTi
x+ bi
) + g(x)
For consensus ADMM, we again reparametrize:
min
x1,...xB ,x
BX
i=1
fi
(aTi
xi
+ bi
) + g(x) subject to xi
= x, i = 1, . . . B
and this yields the decomposable ADMM updates:
x(k)i
= argmin
xi
fi
(aTi
xi
+ bi
) +
⇢
2
kxi
� x(k�1)+ w
(k�1)i
k22,
i = 1, . . . B
x(k) = argmin
x
B⇢
2
kx� x(k) � w(k�1)k22 + g(x)
w(k)i
= w(k�1)i
+ x(k)i
� x(k), i = 1, . . . B
27

Notes:
• It is no longer true that w(k)= 0, so ADMM steps do not
simplify as before
• To reiterate, the xi
, i = 1, . . . B are done in parallel
• Each xi
, i = 1, . . . B can be thought of as a loss minimizationon part of the data, with ridge regularization
• The x update is a proximal operation in regularizer g
• The w update drives the individual variables into consensus
• A di↵erent initial reparametrization (i.e., changing xi
= x,i = 1, . . . B to say, aT
i
xi
+ bi
= x, i = 1, . . . B) will lead to adi↵erent ADMM algorithm
See Boyd et al. (2010) for more details about consensus ADMM,implementation tips, and more advanced strategies for splitting upinto di↵erent subproblems
28

Q&A!Thanks!

![1 Optimal parameter selection for the alternating ... · arXiv:1306.2454v2 [math.OC] 12 Apr 2014 1 Optimal parameter selection for the alternating direction method of multipliers](https://cdn.vdocuments.us/doc/165x107/5ad4e9347f8b9a075a8c3d75/1-optimal-parameter-selection-for-the-alternating-13062454v2-mathoc-12-apr.jpg)

![Alternating Direction Method of Multipliers · CS 584 [Spring 2016] - Ho Practicalities and Tricks • ADMM usually obtains a relatively accurate solution in a handful of iterations,](https://cdn.vdocuments.us/doc/165x107/5b2b12f47f8b9af7088b4582/alternating-direction-method-of-multipliers-cs-584-spring-2016-ho-practicalities.jpg)



