
CAN
© CiA
CAN-based higher layer protocols
CAN introduction - CAN protocols - CAN physical layer - CAN implementations - Higher-layer protocols - CAN applications
CAN
Reiner Zitzmann(CAN in Automation)
www.can-cia.org

CAN
© CiA
Protocol layer interactions
COB = communication object
Indicating(responding)
device
COB
CAN frame(s)
Requesting(confirming)
device
Recessive Recessive
CAN introduction - CAN protocols - CAN physical layer - CAN implementations - Higher-layer protocols - CAN applications
DominantCAN physical
layer
CAN data linklayer
CAN-basedapplication
layer
CAN physicallayer
CAN data linklayer
CAN-basedapplication
layer
CAN
© CiA
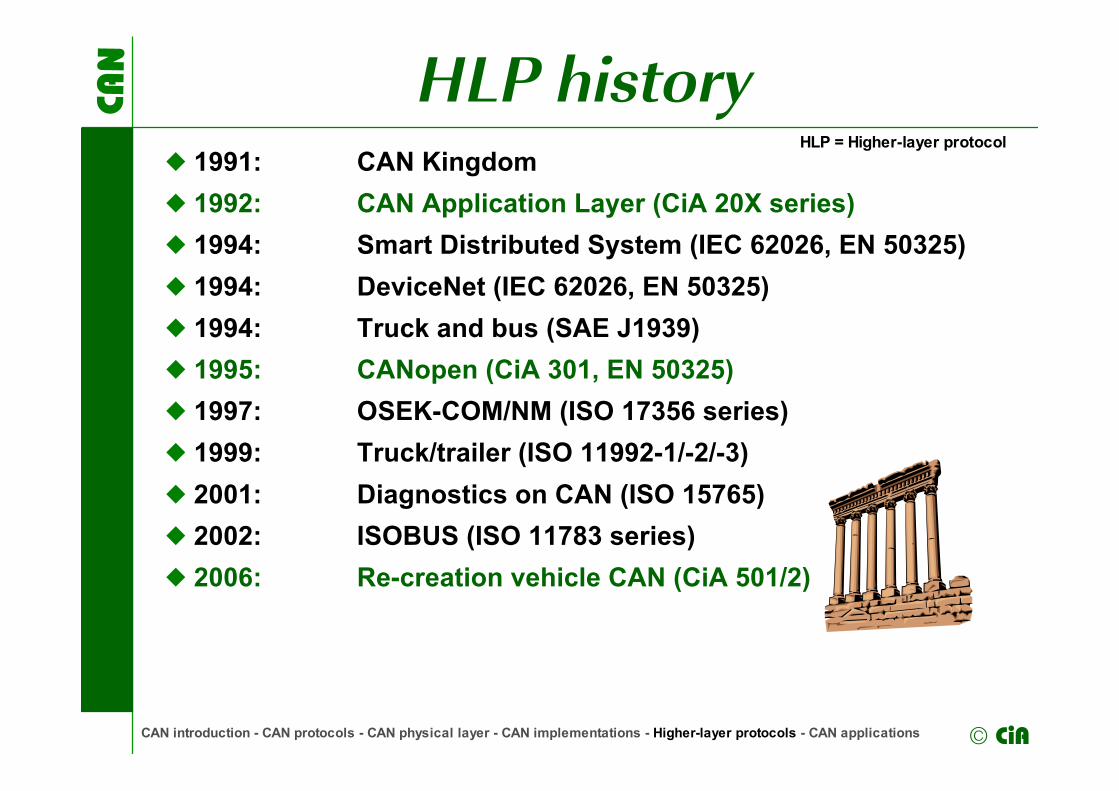
◆ 1991: CAN Kingdom◆ 1992: CAN Application Layer (CiA 20X series)◆ 1994: Smart Distributed System (IEC 62026, EN 50325)◆ 1994: DeviceNet (IEC 62026, EN 50325)◆ 1994: Truck and bus (SAE J1939)◆ 1995: CANopen (CiA 301, EN 50325)◆ 1997: OSEK-COM/NM (ISO 17356 series)◆ 1999: Truck/trailer (ISO 11992-1/-2/-3)◆ 2001: Diagnostics on CAN (ISO 15765)◆ 2002: ISOBUS (ISO 11783 series)◆ 2006: Re-creation vehicle CAN (CiA 501/2)
HLP historyHLP = Higher-layer protocol
CAN introduction - CAN protocols - CAN physical layer - CAN implementations - Higher-layer protocols - CAN applications
CAN
© CiA
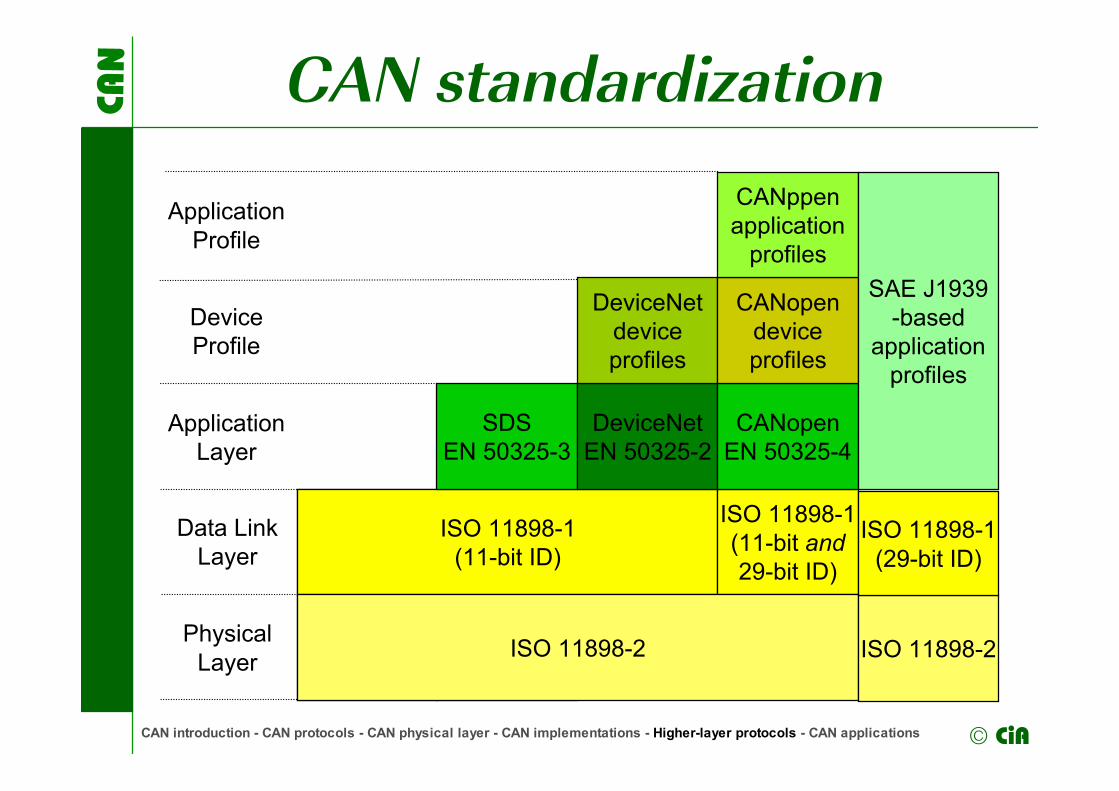
CAN standardization
ISO 11898-1(11-bit ID)
ISO 11898-2
Data LinkLayer
PhysicalLayer
CAN 2.0A
RS-485
ISO 11898-1(11-bit ID)
ISO 11898-1(11-bit and29-bit ID)
ISO 11898-2
ApplicationLayer
SDSEN 50325-3
DeviceNetEN 50325-2
CANopenEN 50325-4
DeviceProfile
DeviceNetdeviceprofiles
CANopendeviceprofiles
ApplicationProfile
CANppenapplication
profiles
ISO 11898-2
ISO 11898-1(29-bit ID)
SAE J1939-based
applicationprofiles
CAN introduction - CAN protocols - CAN physical layer - CAN implementations - Higher-layer protocols - CAN applications

CAN
© CiA
CANopen device model
CAN introduction - CAN protocols - CAN physical layer - CAN implementations - Higher-layer protocols - CAN applications
Protocol Stack
PDO ProtocolSDO ProtocolSync ProtocolTime Protocol
Emergency ProtocolNMT Protocol
Heartbeat Protocoletc.
Object Dictionary
Data TypesCommunication Objects
Application ObjectsProprietary Objects
ApplicationSoftware
Device ProfileImplementation
ProprietarySoftwareRoutines
I/O
CAN
Control IFConfiguration IFDiagnostic IF
Process IF
CAN
© CiA
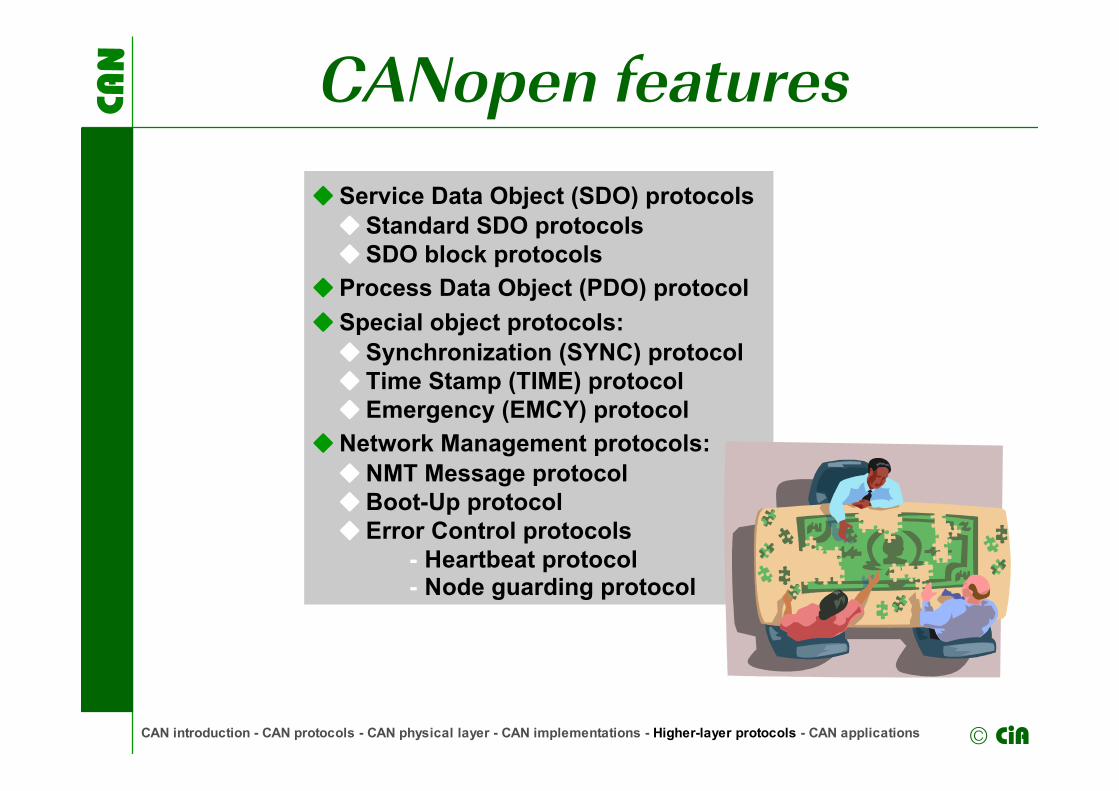
CANopen features
CAN introduction - CAN protocols - CAN physical layer - CAN implementations - Higher-layer protocols - CAN applications
◆ Service Data Object (SDO) protocols ◆ Standard SDO protocols ◆ SDO block protocols◆ Process Data Object (PDO) protocol◆ Special object protocols: ◆ Synchronization (SYNC) protocol ◆ Time Stamp (TIME) protocol ◆ Emergency (EMCY) protocol◆ Network Management protocols: ◆ NMT Message protocol ◆ Boot-Up protocol ◆ Error Control protocols
- Heartbeat protocol- Node guarding protocol
CAN
© CiA
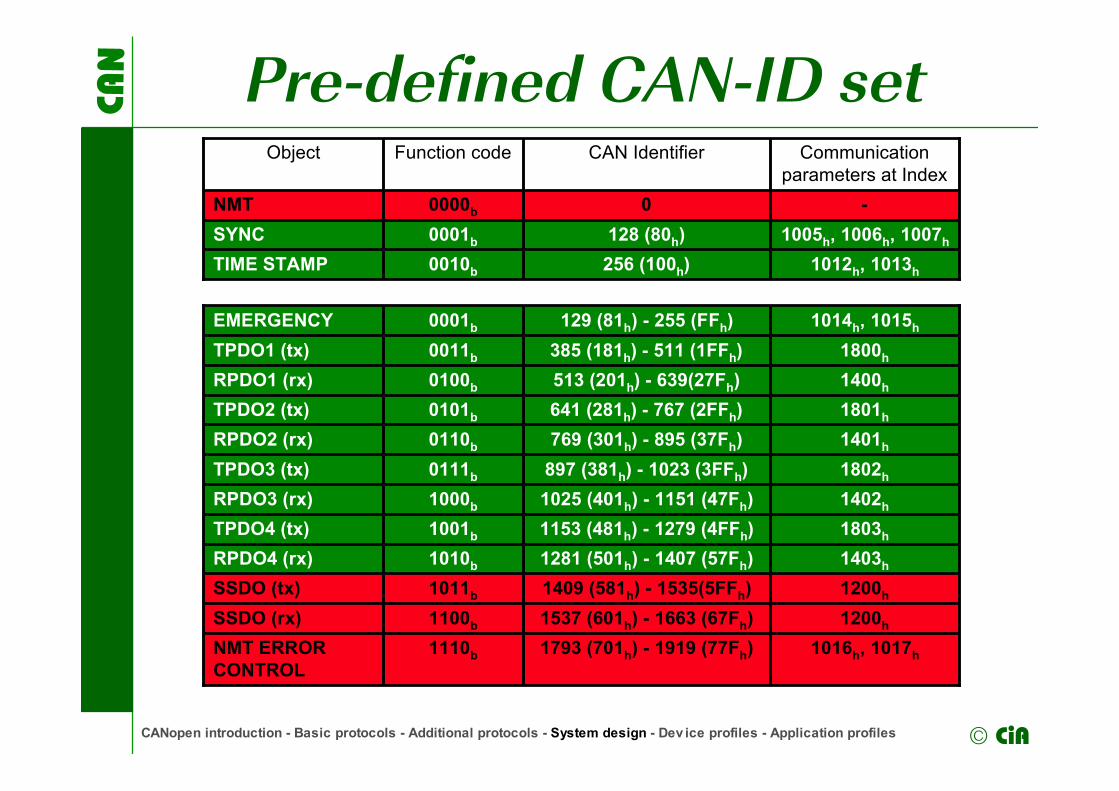
Pre-defined CAN-ID set
CANopen introduction - Basic protocols - Additional protocols - System design - Dev ice profiles - Application profiles
1200h1537 (601h) - 1663 (67Fh)1100bSSDO (rx)1016h, 1017h1793 (701h) - 1919 (77Fh)1110bNMT ERROR
CONTROL
1200h1409 (581h) - 1535(5FFh)1011bSSDO (tx)1403h1281 (501h) - 1407 (57Fh)1010bRPDO4 (rx)1803h1153 (481h) - 1279 (4FFh)1001bTPDO4 (tx)1402h1025 (401h) - 1151 (47Fh)1000bRPDO3 (rx)1802h897 (381h) - 1023 (3FFh)0111bTPDO3 (tx)1401h769 (301h) - 895 (37Fh)0110bRPDO2 (rx)1801h641 (281h) - 767 (2FFh)0101bTPDO2 (tx)1400h513 (201h) - 639(27Fh)0100bRPDO1 (rx)1800h385 (181h) - 511 (1FFh)0011bTPDO1 (tx)
1014h, 1015h129 (81h) - 255 (FFh)0001bEMERGENCY
1012h, 1013h256 (100h)0010bTIME STAMP1005h, 1006h, 1007h128 (80h)0001bSYNC
-00000bNMT
Communicationparameters at Index
CAN IdentifierFunction codeObject
CAN
© CiA
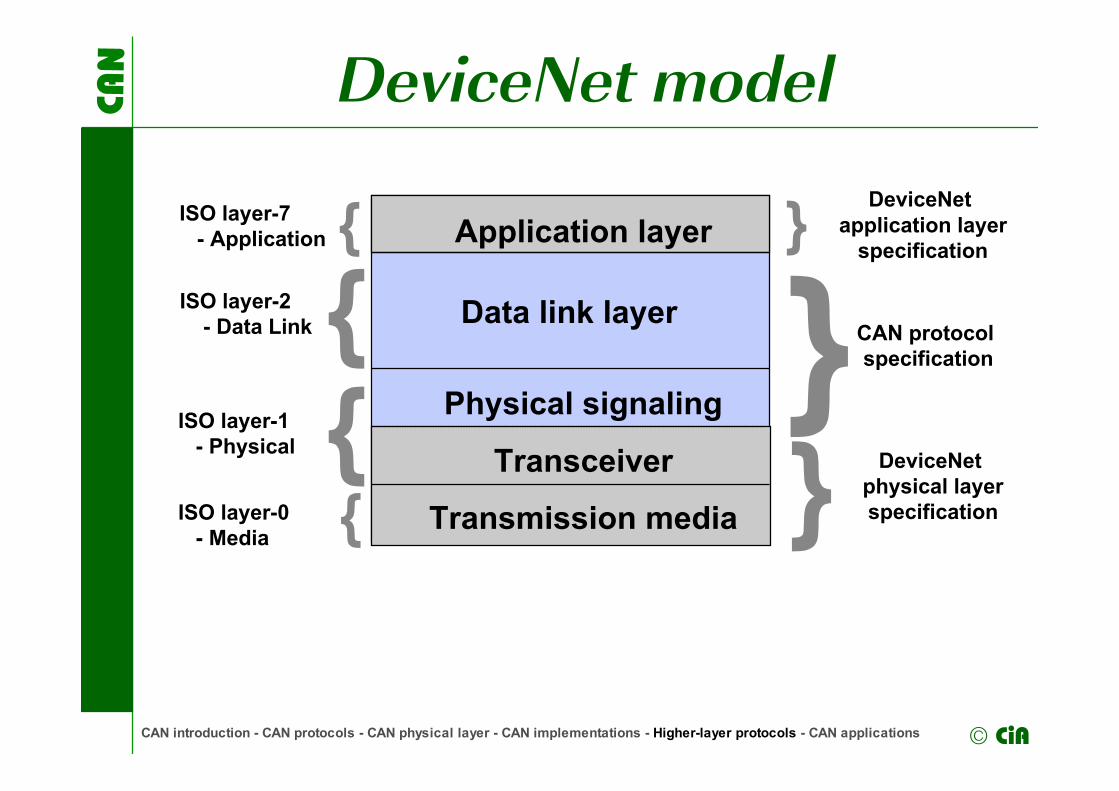
Application layer
Physical signaling
Transceiver
Transmission mediaISO layer-0 - Media
ISO layer-1 - Physical
ISO layer-2 - Data Link {
{{
ISO layer-7 - Application {
Data link layer
DeviceNet application layer
specification
CAN protocol specification
DeviceNet physical layer specification
}}
}
DeviceNet model
CAN introduction - CAN protocols - CAN physical layer - CAN implementations - Higher-layer protocols - CAN applications

CAN
© CiA
DeviceNet
Assembly
DeviceNetObject
ParameterIdentity
MessageRouter
ApplicationObject(s)
Connection
ExplicitmsgI/O
Required Objects
Device object model
CAN introduction - CAN protocols - CAN physical layer - CAN implementations - Higher-layer protocols - CAN applications

CAN
© CiA
CumulativeDrop-line Budget156m @ 125Kbaud 78m @ 250Kbaud 39m @ 500Kbaud(Maximum of 6m each)
Trunk line Distanceand Baud rate100m Max. with Thin cable500m @ 125Kbaud (thick)250m @ 250Kbaud (thick)100m @ 500Kbaud (thick)(4Km with Repeaters)
Maximum Devices64 Nodes per Network
Physical Media(Shielded Twisted Pair)Communications and Power•Thick - Trunk wire•Thin - Trunk or Drop
Drop-line wiring•Single drop•Daisy-chaining off drop•Branching off drop
Device ConnectionsT-TapsZero-drop
Terminating Resistors75Ω Resistors at bothnetwork trunkline ends
Network Power•24vDC power to devices•Thick trunk rated to 8 amps•Thin wire rated at 3 amps
Messaging ServicesProducer/Consumer•High-speed I/O•Programming•Configuration•Diagnostics
ALLEN-BRADLEY
7 8 9
4 5 6
1 2 3
. 0 -
<-----------------'
<
-
-
F1
F6
F2
F7
F3
F8
F4
F9
F5
F1
0
PanelView 550
< >
^
v
DeviceNet features
CAN introduction - CAN protocols - CAN physical layer - CAN implementations - Higher-layer protocols - CAN applications

CAN
© CiA
Multi-master
Cyclic
Strobe Change-of-State
Multicast
Point-to-Point
Peer to Peer
Polling
Broadcast
ALLEN-BRADLEY
7 8 9
4 5 6
1 2 3
. 0 -
<-----------------'
<
-
-
F1
F6
F2
F7
F3
F8
F4
F9
F5
F1
0
PanelView 550
< >
^
v
Message services
CAN introduction - CAN protocols - CAN physical layer - CAN implementations - Higher-layer protocols - CAN applications

CAN
© CiA
PresentationSession
Transport
6
54
J1939/01 - Truck and Bus document defining application of J1939 to on-highway heavy duty vehicles.J1939/02 - Construction and agriculture-based and agriculture-equipment-based document.
Network3 J1939/31 - Truck and Bus Network Layer
Data Link2 J1939/21 - Data Link Layer
Physical1 J1939/1x - Physical Layer Documents/11 - Truck and Bus (250 kbit/s)/12 - John Deere (250 kbit/s)
/13 - OBD connector /14 - DIN 9684 (50 kbit/s)
/15 - Unshielded (250 kbit/s)
J1939 - Base documentcontaining a generaldescription, a tutorial andtables of addresses, datacontents, etc.
ApplicationProfile7
J1939/81 - Network Management J1939/71 - Vehicle Application LayerJ1939/72 - Virtual Terminal (DIN 9684) - DraftJ1939/73 - Application Layer - Diagnostics
SAE J1939 reference model
CAN introduction - CAN protocols - CAN physical layer - CAN implementations - Higher-layer protocols - CAN applications
CAN
© CiA
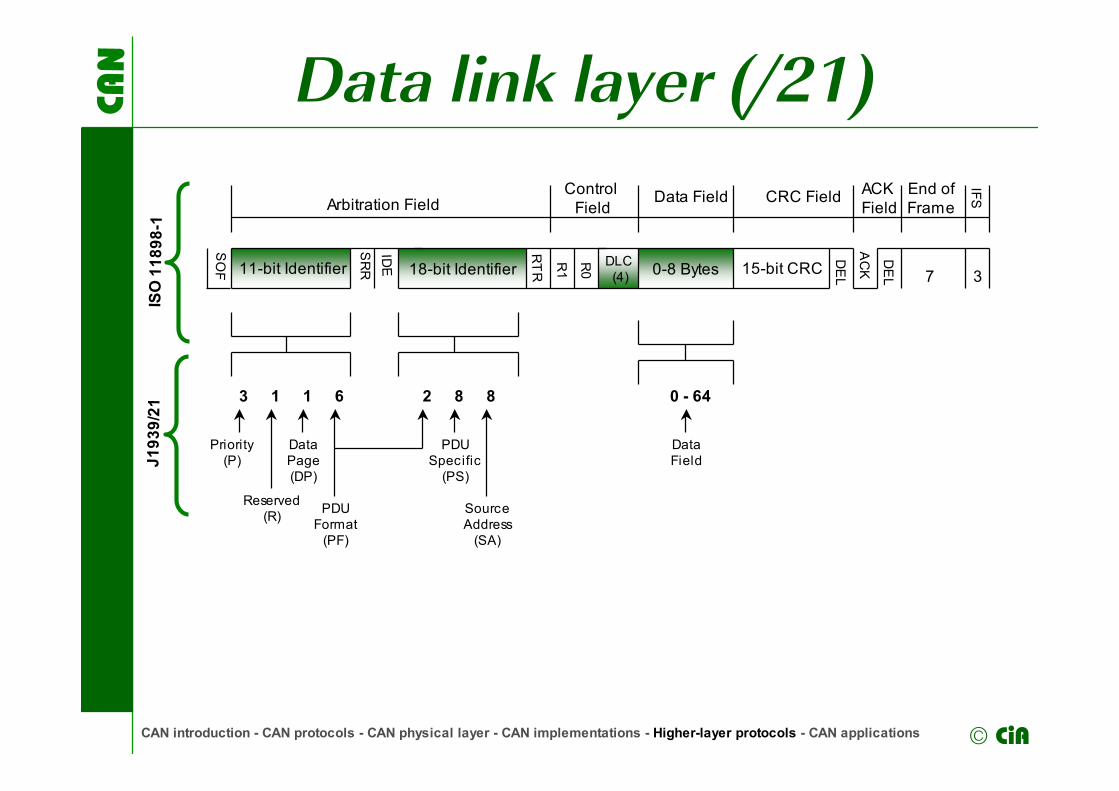
DLC (4) 0-8 Bytes18-bit Identifier 37
AC
K15-bit CRC
IDE
SR
R11-bit Identifier
SO
F
Data Field
R1
RT
R
R0
DE
L
DE
L
Arbitration FieldControl
FieldCRC Field ACK
FieldEnd ofFrame
IFSIS
O 1
1898
-1
2 8 8
PDUSpecific
(PS)
SourceAddress
(SA)
0 - 64
DataField
3 1 1 6
Priority(P)
Reserved(R)
DataPage(DP)
PDUFormat
(PF)
J193
9/21
Data link layer (/21)
CAN introduction - CAN protocols - CAN physical layer - CAN implementations - Higher-layer protocols - CAN applications
CAN
© CiA
A transport protocol is provided with the following features :◆ Connection-oriented, point-to-point (RTS/CTS).◆ Connectionless broadcast (BAM).◆ 1785 bytes may be sent.
Receiver controls flow of message:◆ May temporarily stop by sending CTS with #packets = 0,
continuing to send every 0,55 seconds.◆ May close with End-of-Message ACK.
Time will close connection if values exceed the following:◆ 250 ms between packets.◆ 1250 ms after CTS message sent.◆ 1250 ms and no CTS or ACK sent after last packet.◆ 550 ms no CTS after CTS(0) sent.
Transport protocol
CAN introduction - CAN protocols - CAN physical layer - CAN implementations - Higher-layer protocols - CAN applications

CAN
© CiA
MESSAGE
3.3.35 AMBIENT CONDITIONS
Transmission repetition rate: 1 secData length: 8 bytesPGN 00FEF5h
Byte: 1 Barometer pressure2,3 Cab interior temperature4,5 Ambient air temperature
6 Air inlet temperature7,8 Road surface temperature
PARAMETERS
3.2.5.43 Barometric pressure- Absolute air pressure of the atmosphere.Data Length: 1 byteResolution: 0,5 kPa/bit gain, 0 kPa offsetData Range: 0 kPa to + 125 kPa (0 psi to + 18,1 psi)SPN: 108Type: Measured
3.2.5.11 Cab interior temperature- Temperature of air inside the part of thevehicle encloses the driver and vehicle operating controls.Data Length: 2 bytesResolution: 0,03125 C/bit gain, -273 C offsetData Range: -273 C to + 1735.0 C (-459,4 to 3155.0 F)SPN: 170Type: Measured
3.2.5.12 Ambient air temperature- Temperature of air surrounding vehicle.Data Length: 2 bytesResolution: 0,03125 C/bit gain, -273 C offsetData Range: -273 C to + 1735.0 C (-459,4 to 3155,0 F)SPN: 171Type: Measured
4.2.5.13 Air inlet temperature- Temperature of air entering vehicle air inductionsystem.Data Length: 1 bytesResolution: 1 C/bit gain, -40 C offsetData Range: -40 C ti +210 C (-40 to 410 F)SPN: 172Type: Measured
Parameter specification
CAN introduction - CAN protocols - CAN physical layer - CAN implementations - Higher-layer protocols - CAN applications

CAN
© CiA
EngineHitch
TractorECU
GPSImplement ECU andBridge
ImplementECU
ImplementECU
Task Controller
ManagementComputer
GatewayVT
ISO 11783 (ISOBUS)
CAN-based SAE J1939
CAN-basedISO 11783
e.g. CANopen
CAN introduction - CAN protocols - CAN physical layer - CAN implementations - Higher-layer protocols - CAN applications
CAN
© CiA
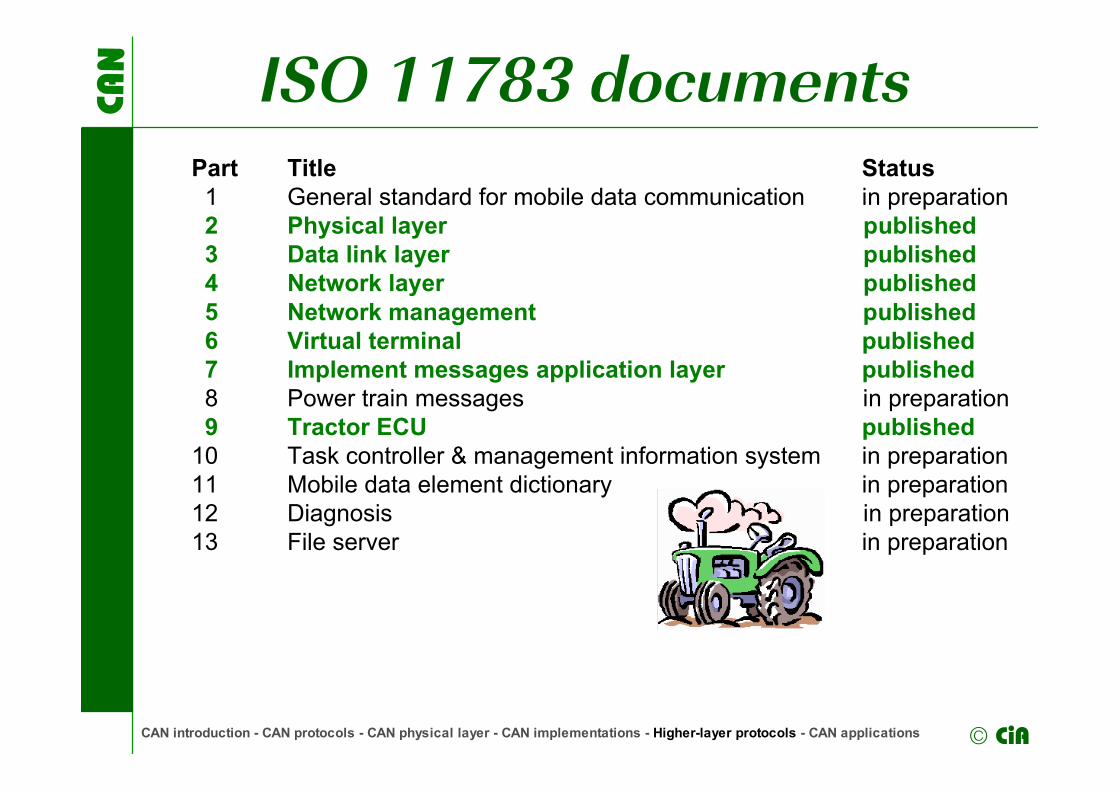
ISO 11783 documentsPart Title Status 1 General standard for mobile data communication in preparation 2 Physical layer published 3 Data link layer published 4 Network layer published 5 Network management published 6 Virtual terminal published 7 Implement messages application layer published 8 Power train messages in preparation 9 Tractor ECU published10 Task controller & management information system in preparation11 Mobile data element dictionary in preparation12 Diagnosis in preparation13 File server in preparation
CAN introduction - CAN protocols - CAN physical layer - CAN implementations - Higher-layer protocols - CAN applications
CAN
© CiA
Data link and network layer
• CAN extended frame format (29-bit identifier)• Frame format compatible to SAE J1939• Broadcast and peer-to-peer communication services• Transport protocol for parameter groups with length > 8 byte
• Connection mode data transfer (SAE J1939)• Broadcast announce message (SAE J1939)• Extended transport protocol (ISO 11783)• Fast packet transport protocol (NMEA2000)
CAN introduction - CAN protocols - CAN physical layer - CAN implementations - Higher-layer protocols - CAN applications

CAN
© CiA
Event- versus time-triggered
Asynchronous triggering of message transmission• Change of value• Elapsing of not synchronized local timer• Other device-internal event
Advantages: High real-time performance, high design flexibility
Synchronous triggering of message transmission• Elapsing of local timer synchronized with global (system) time• Receiving in broadcast a trigger message
Advantages: High determinism capability, high composibility
CAN introduction - CAN protocols - CAN physical layer - CAN implementations - Higher-layer protocols - CAN applications
CAN
© CiA
◆ All messages are initiated by the progression of time◆ Each message has a defined time slot◆ No collision of messages◆ No automatic re-transmission of faulty message◆ Reception of each message is known in advance
Simplifies emulation and debugging◆ Time synchronisation
Global time system◆ Message scheduling has to be assigned before run time
TTCAN requirementsTTCAN = time-triggeredcommunication on CAN(ISO 11898-4)
CAN introduction - CAN protocols - CAN physical layer - CAN implementations - Higher-layer protocols - CAN applications
CAN
© CiA
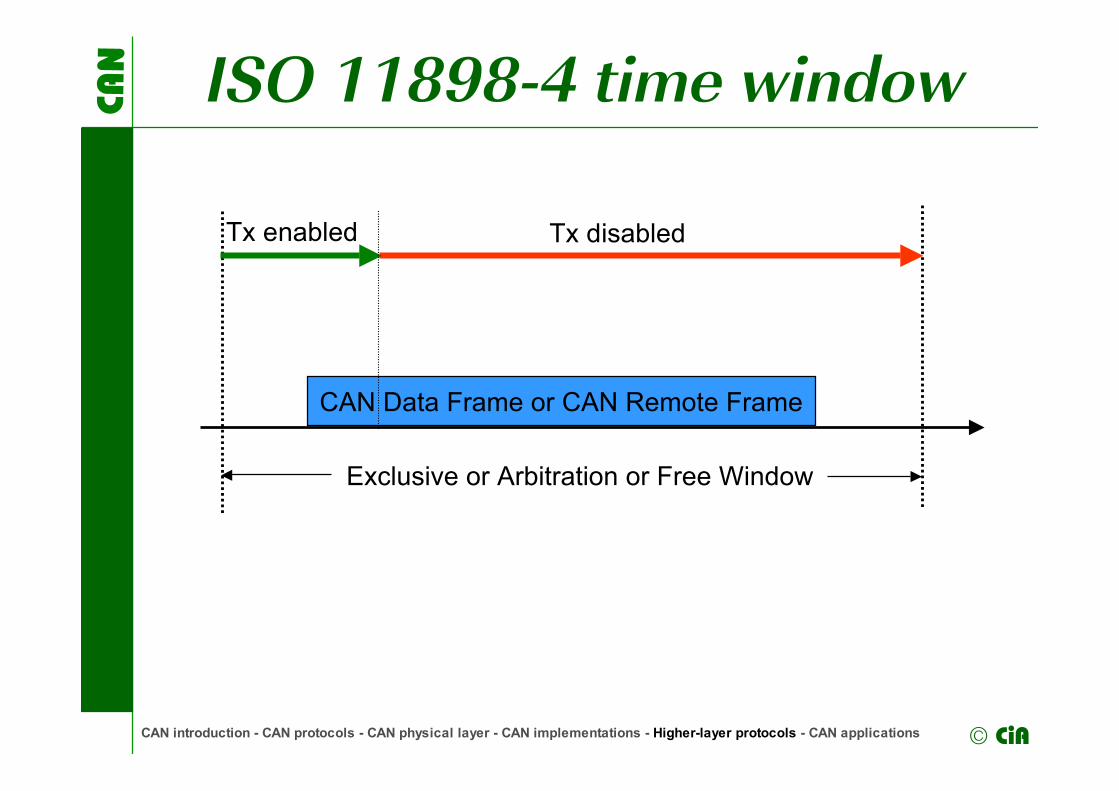
Tx disabled
CAN Data Frame or CAN Remote Frame
Exclusive or Arbitration or Free Window
Tx enabled
ISO 11898-4 time window
CAN introduction - CAN protocols - CAN physical layer - CAN implementations - Higher-layer protocols - CAN applications

CAN
© CiA
TTCAN system matrix
CAN introduction - CAN protocols - CAN physical layer - CAN implementations - Higher-layer protocols - CAN applications
CAN
© CiA
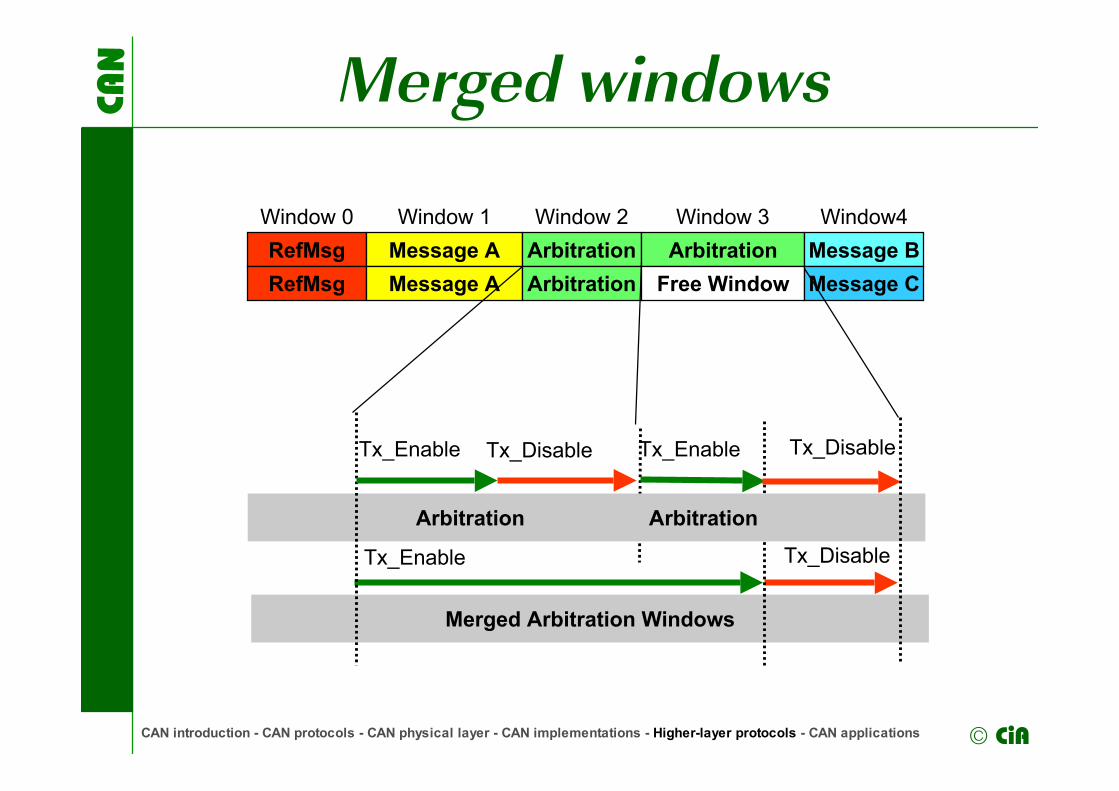
Window 0 Window 1 Window 2 Window 3 Window4RefMsg Message A Arbitration Arbitration Message BRefMsg Message A Arbitration Free Window Message C
Merged Arbitration Windows
Tx_Enable Tx_Disable
Arbitration Arbitration
Tx_Enable Tx_Enable Tx_DisableTx_Disable
Merged windows
CAN introduction - CAN protocols - CAN physical layer - CAN implementations - Higher-layer protocols - CAN applications

CAN
© CiA
Next_Is_Gap
7
reserved
6
Optional Cycle_Count_Bits
5 to 0
• The Reference message of level 1 consists of at least one data byte
Reference message (level1)
CAN introduction - CAN protocols - CAN physical layer - CAN implementations - Higher-layer protocols - CAN applications







