Download - 1 Geometrical Transformation 2 Outline General Transform 3D Objects Quaternion & 3D Track Ball
1
Geometrical Transformation
2
Outline• General Transform
• 3D Objects
• Quaternion & 3D Track Ball

3
Modeling Transform• Specify transformation for objects
– Allow definitions of objects in own coordinate systems
– Allow use of object definition multiple times in a scene

4
Overview• 2D transformations
– Basic 2-D transformations– Matrix representation– Matrix composition
• 3D transformations– Basic 3-D transformation– Same as 2-D
• Transformation Hierarchies– Scene graphs

5
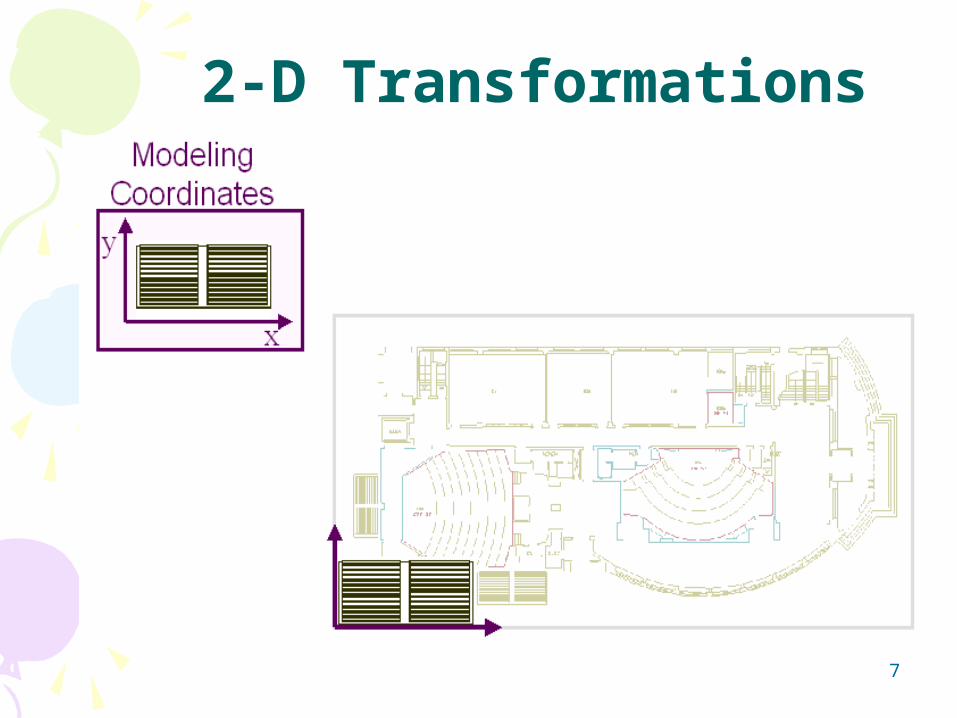
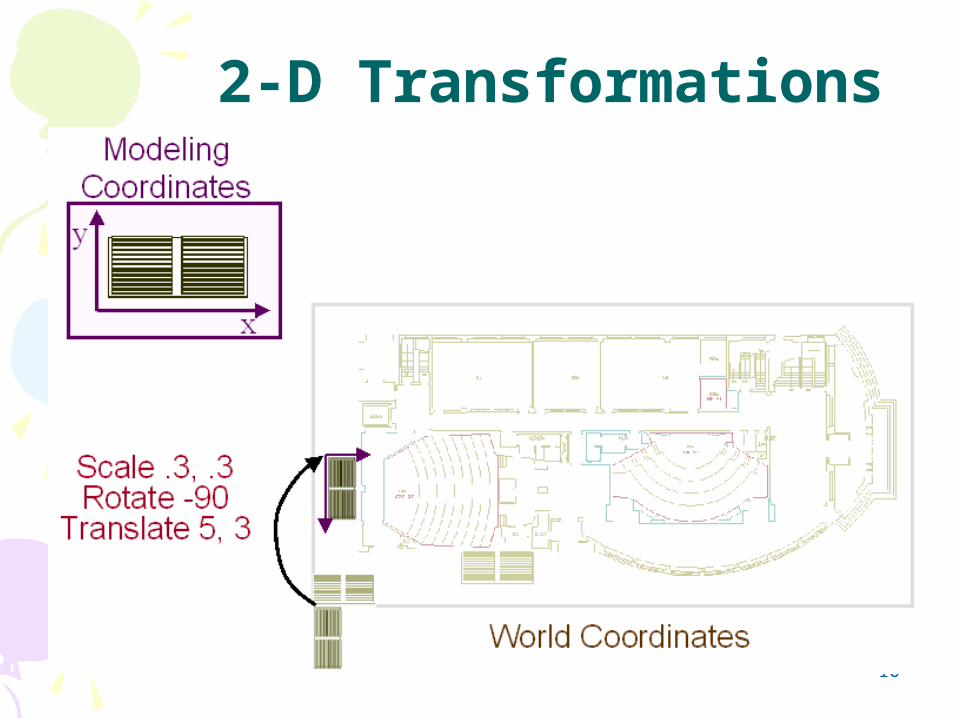
2-D Transformations

6
2-D Transformations
7
2-D Transformations

8
2-D Transformations

9
2-D Transformations
10
2-D Transformations

11
Basic 2D Transformations
xtxx '
ytyy '
xSxx '
ySyy '
xShyy y 'yShxx x '
sincos' yxx cossin' yyy

12
Basic 2D Transformations
xtxx '
ytyy '
xSxx '
ySyy '
yShxx x 'xShyy y '
sincos' yxx cossin' yyy
y
x
Syy
Sxx
'
'
13
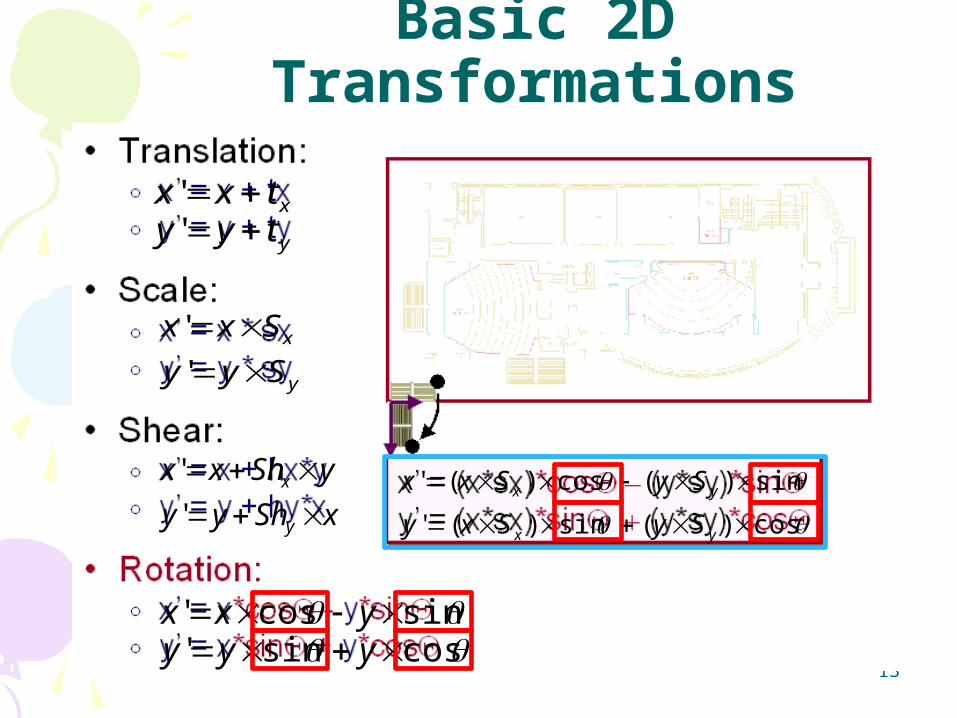
Basic 2D Transformations
xtxx 'ytyy '
xSxx '
ySyy '
sincos' yxx cossin' yyy
yShxx x 'xShyy y '
cos)(sin)('
sin)(cos)('
yx
yx
SySxy
SySxx

14
Rotation around the origin (2-D)

15
Rotation around the origin (2-D)

16
Rotation around the origin (2-D)

17
Rotation (3-D)

18
Rotation (3-D)

19
Basic 2D Transformations
xtxx 'ytyy '
xSxx '
ySyy '
yShxx x 'xShyy y '
sincos' yxx cossin' yyy
cos)(sin)('
sin)(cos)('
yx
yx
SySxy
SySxx

20
Basic 2D Transformations
xtxx '
ytyy '
xSxx '
ySyy '
yShxx x 'xShyy y '
sincos' yxx cossin' yyy
yyx
xyx
tSySxy
tSySxx
cos)(sin)('
sin)(cos)('
21
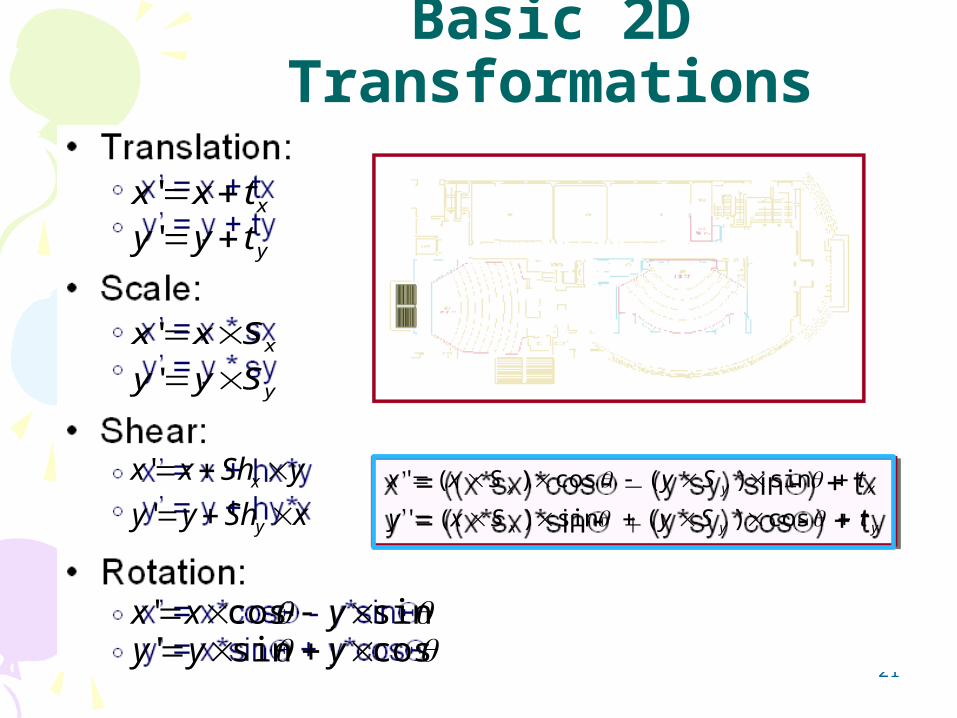
Basic 2D Transformations
xtxx '
ytyy '
xSxx '
ySyy '
yShxx x 'xShyy y '
sincos' yxx cossin' yyy
yyx
xyx
tSySxy
tSySxx
cos)(sin)('
sin)(cos)('
22
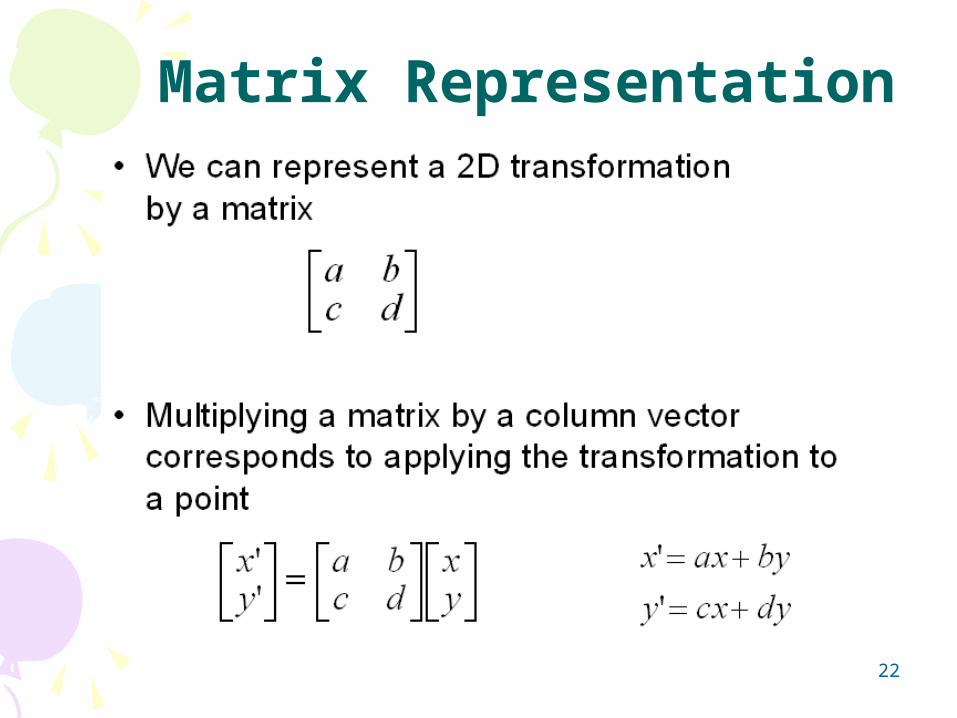
Matrix Representation

23
Matrix Representation

24
2x2 Matrix
xsx x 'ysy y '
xsys
y
x
s
s
y
x
y
x
0
0
'
'

25
Scaling

26
Scaling Around A Point

27
2x2 Matrix

28
Shear (2-D)

29
Shear (3-D)

30
2x2 Matrix
31
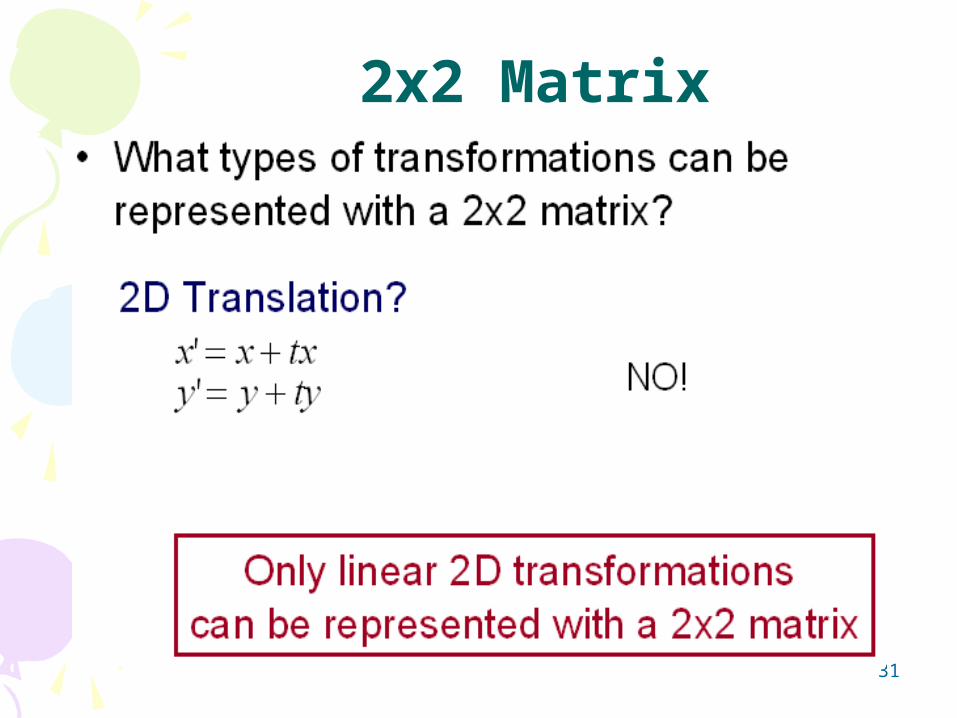
2x2 Matrix

32
2D Translation

33
Basic 2D Transformations

34
Homogeneous Coordinates

35
Linear Transformations

36
Affine Transformations

37
Projective Transformations

38
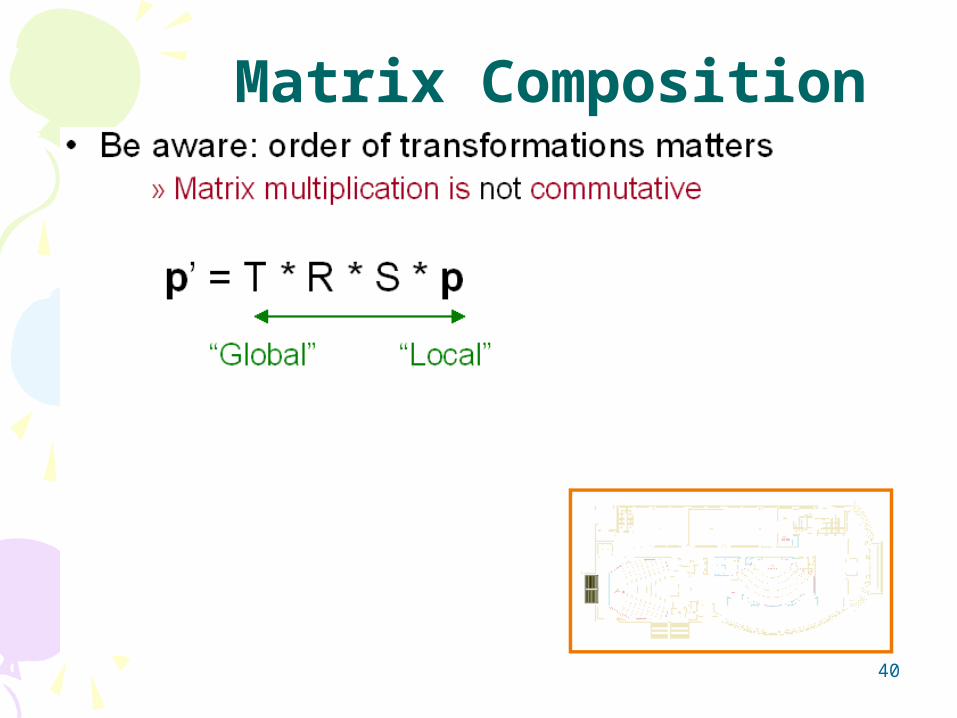
Matrix Composition

39
Matrix Composition
40
Matrix Composition

41
Matrix Composition

42
3D Transformations

43
Basic 3D Transformations

44
Basic 3D Transformations

45
GENERAL ROTATION ABOUT ANAXIS
An axis in space is specified by a point P and a vector direction .Suppose that we wish to rotate an object about this arbitrary axis.
t

46
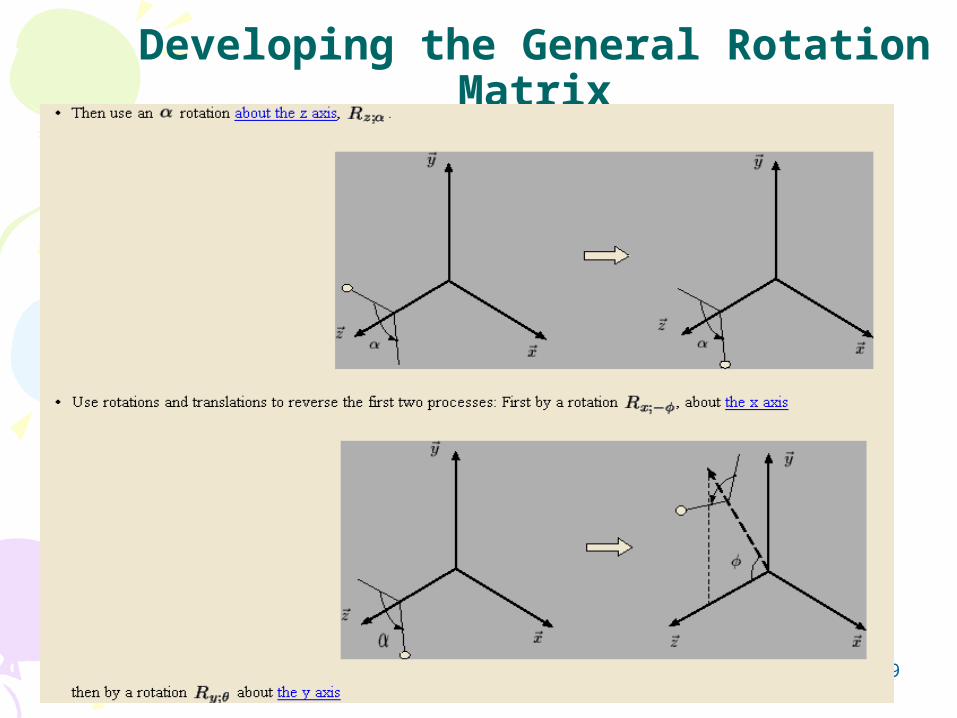
Developing the General Rotation Matrix

47
Developing the General Rotation Matrix

48
Developing the General Rotation Matrix
49
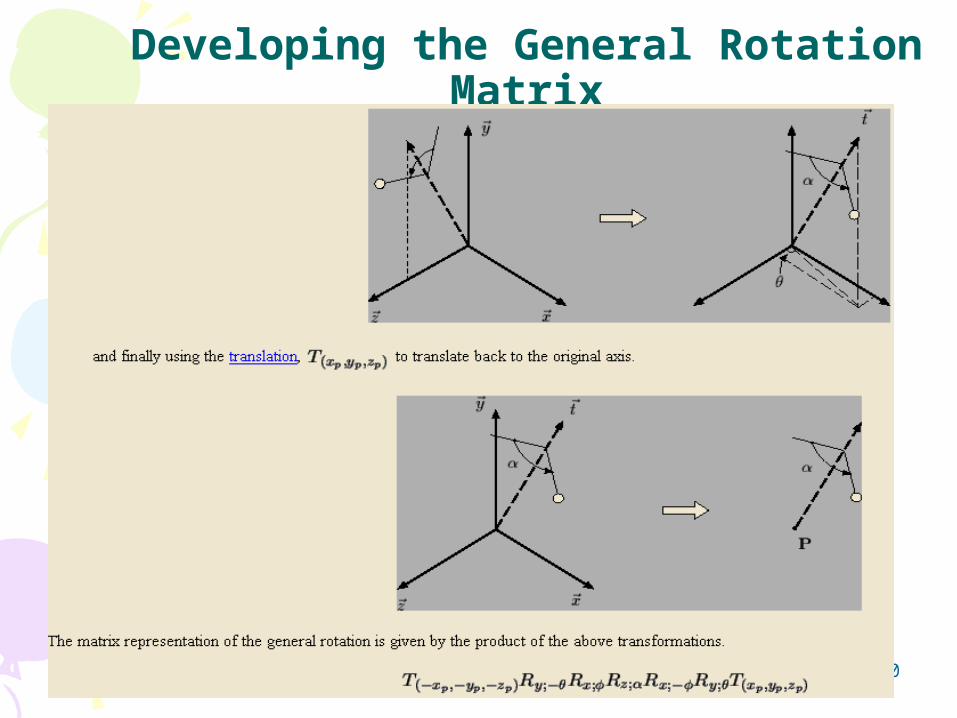
Developing the General Rotation Matrix
50
Developing the General Rotation Matrix

51
Developing the General Rotation Matrix
• Be careful …………
Z
X
(+,+)
(-,-)In both cases, tan(y/x) are positive.So, we need to carefully chooseit by checking the signs of x and y
52
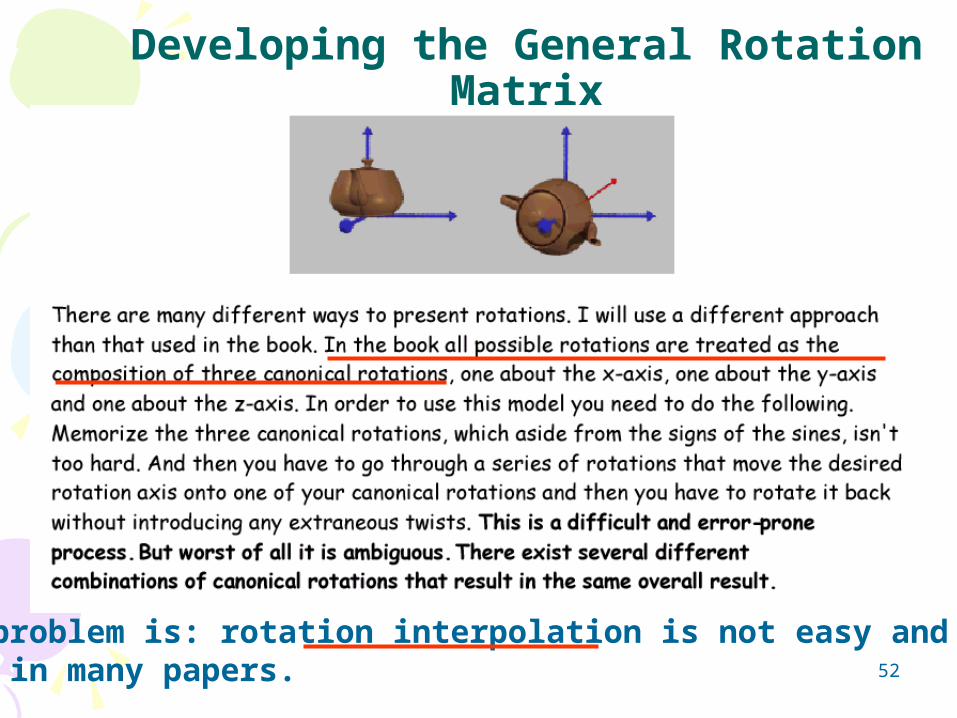
Developing the General Rotation Matrix
Another problem is: rotation interpolation is not easy and not goodreported in many papers.

53

54

55
Angular displacement glRotate( , Ax,Ay,Az)
• (,n) defines an angular displacement of about an axis u or n for rotating a vector v

56
sin)()cos1)((cos
sin)(cos))(()(
sin)(cos][][][][ ||||||
vnvnnv
vnnvnvnvn
vnvvvRvRvvRvR
The above formula is a matrix form, so we can use Matrix to compute rotation
In above equation, v=(x,y,z)T and n=(ax,ay,az)T

57

58

59

60

61
Inverse Transformation

62
Inverse Transformation

63
Transform points, lines, planes etc.

64
Transforming Normals

65
Transformation Hierarchies

66
OpenGL transformation Matrices

67
OpenGL transformation Matrices
68
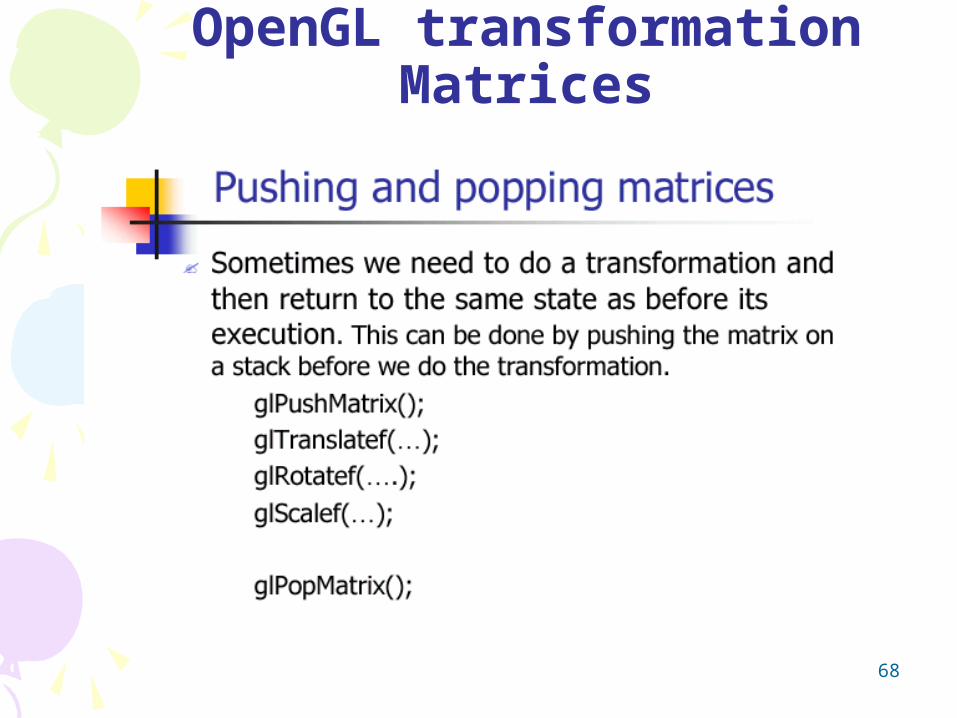
OpenGL transformation Matrices

69
OpenGL transformation Matrices
70
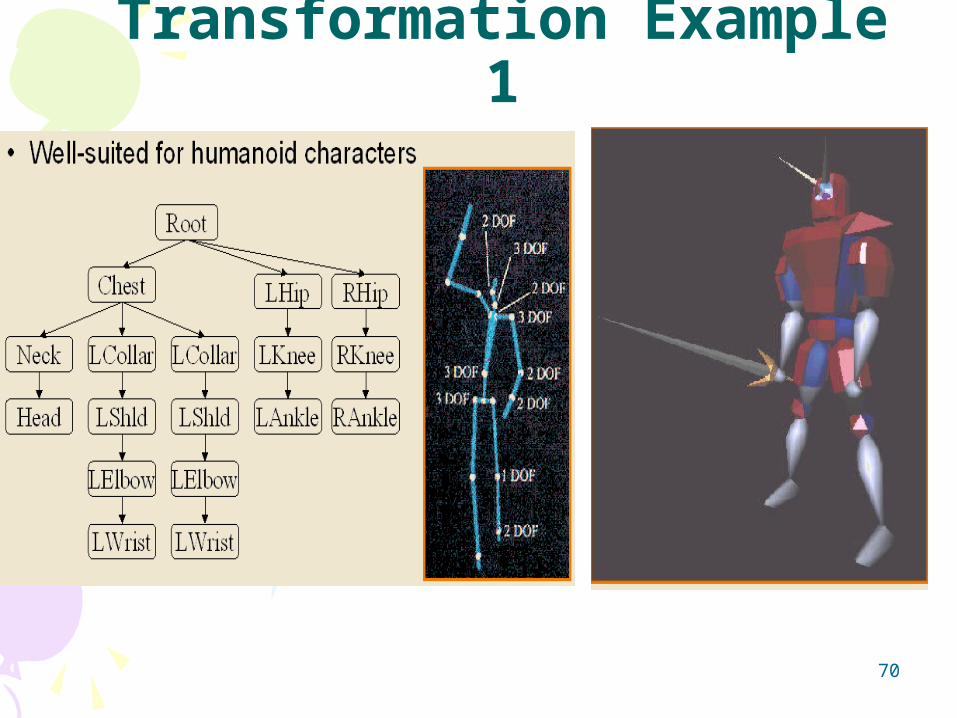
Transformation Example 1

71
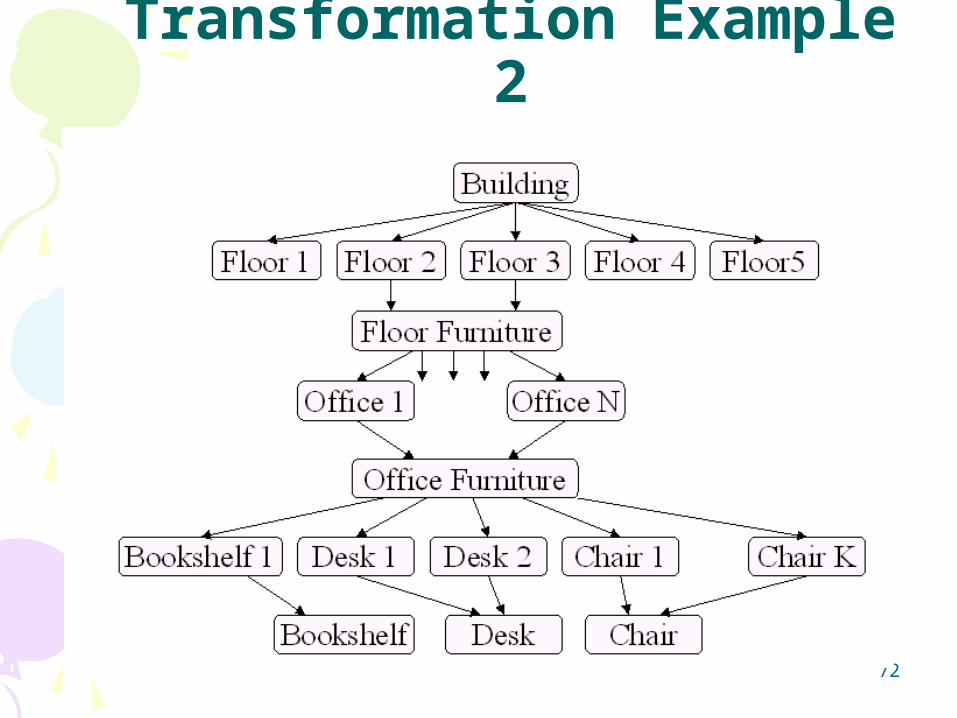
Transformation Example 2
72
Transformation Example 2
73
Hierarchical Scene Graph
This topics will be taught in future or the next semester!!

74

75

76
77

78
79

80

81

82

83

84

85

86
Applications

87
Applications

88
Applications

89

90

91

92
93







