11 of 55 of 55PP.AFD.02.MotorBasicsPP.AFD.02.MotorBasics07/08/200207/08/2002
Yaskawa Electric Yaskawa Electric AmericaAmerica
Motor BasicsMotor Basics
22 of 55 of 55PP.AFD.02.MotorBasicsPP.AFD.02.MotorBasics07/08/200207/08/2002
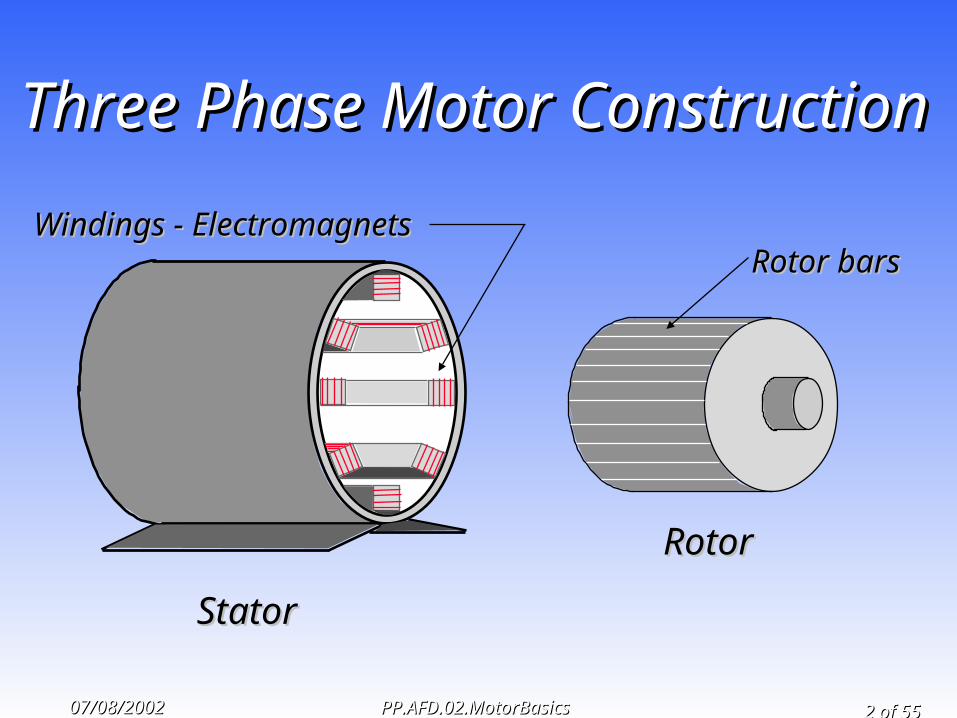
Three Phase Motor ConstructionThree Phase Motor Construction
StatorStator
RotorRotor
Windings - ElectromagnetsWindings - ElectromagnetsRotor barsRotor bars
33 of 55 of 55PP.AFD.02.MotorBasicsPP.AFD.02.MotorBasics07/08/200207/08/2002
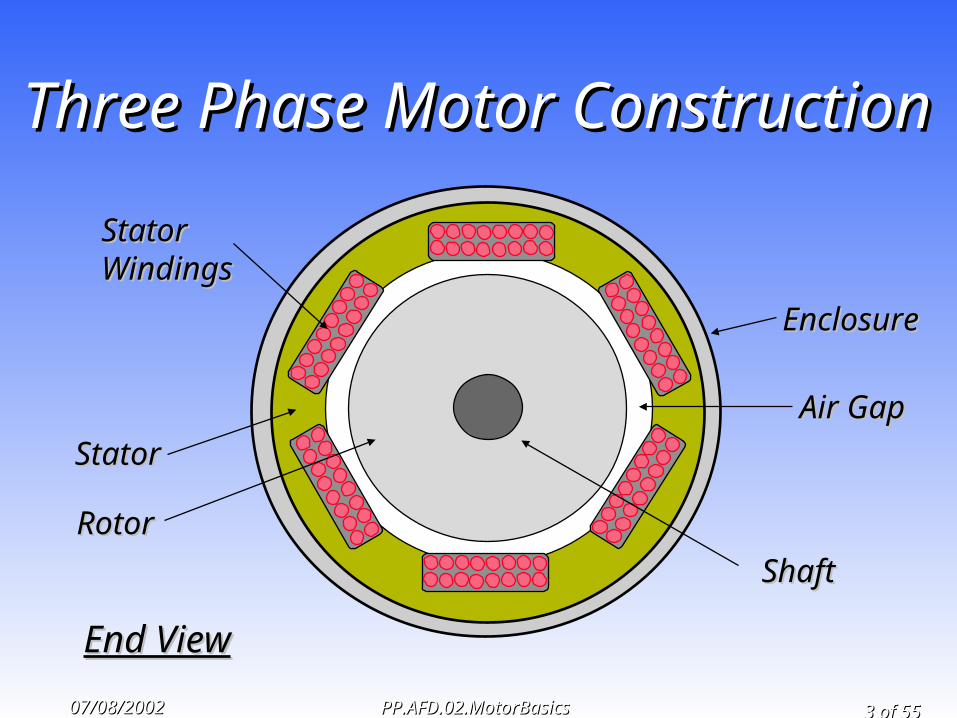
Three Phase Motor ConstructionThree Phase Motor Construction
End ViewEnd View
RotorRotor
StatorStator
EnclosureEnclosure
Air GapAir Gap
Stator Stator WindingsWindings
ShaftShaft

44 of 55 of 55PP.AFD.02.MotorBasicsPP.AFD.02.MotorBasics07/08/200207/08/2002
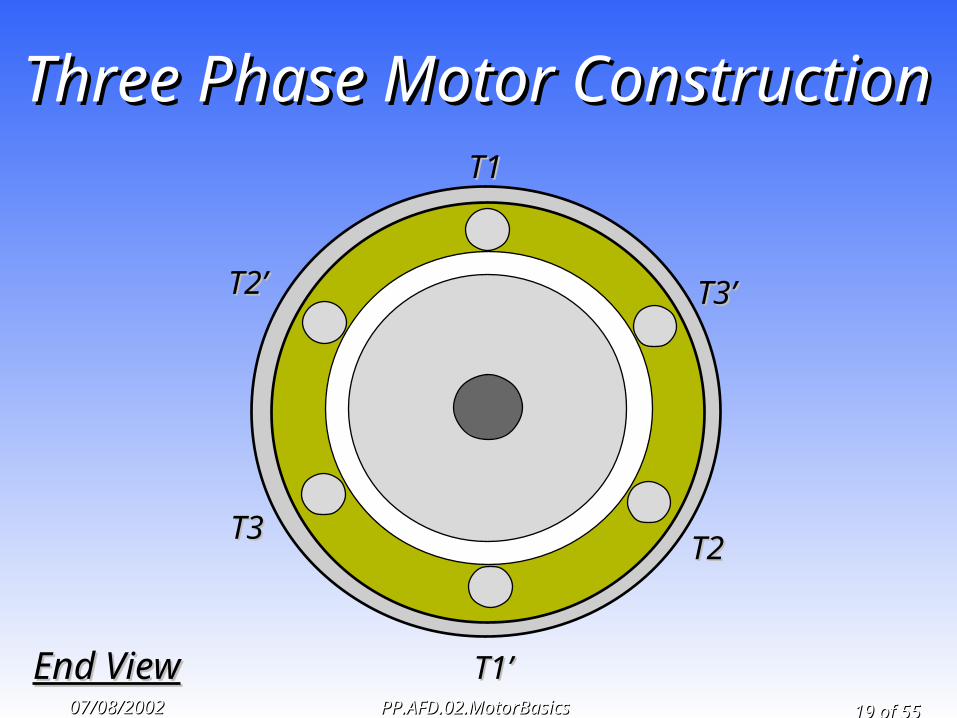
Three Phase Motor ConstructionThree Phase Motor Construction
End ViewEnd View
T1T1
T2T2
T2’T2’
T3T3
T1’T1’
T3’T3’
55 of 55 of 55PP.AFD.02.MotorBasicsPP.AFD.02.MotorBasics07/08/200207/08/2002
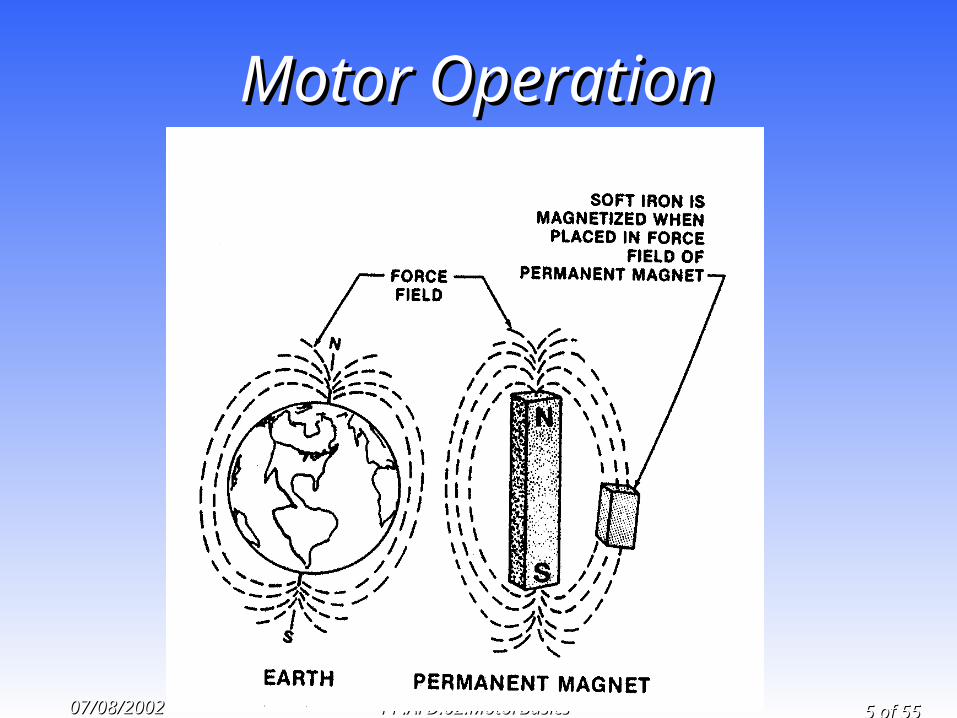
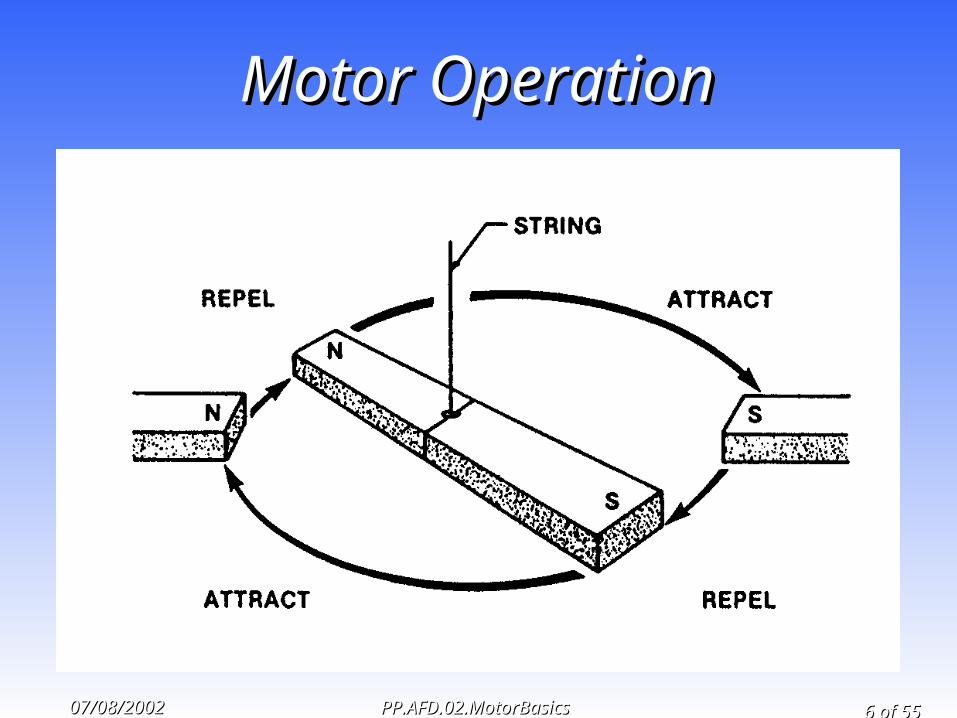
Motor OperationMotor Operation
66 of 55 of 55PP.AFD.02.MotorBasicsPP.AFD.02.MotorBasics07/08/200207/08/2002
Motor OperationMotor Operation
77 of 55 of 55PP.AFD.02.MotorBasicsPP.AFD.02.MotorBasics07/08/200207/08/2002
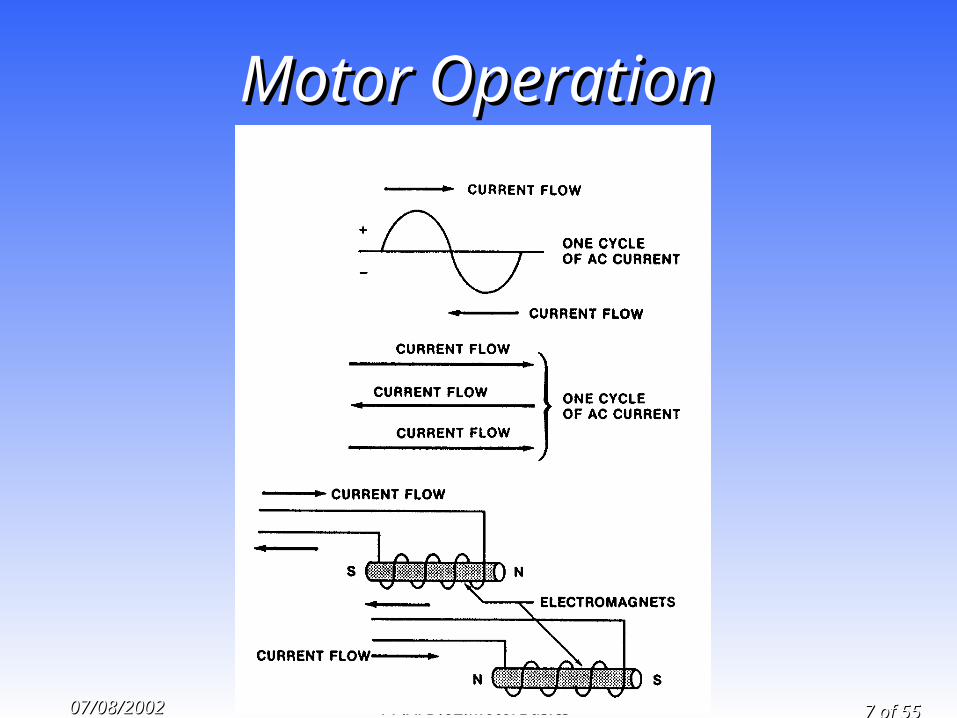
Motor OperationMotor Operation
88 of 55 of 55PP.AFD.02.MotorBasicsPP.AFD.02.MotorBasics07/08/200207/08/2002
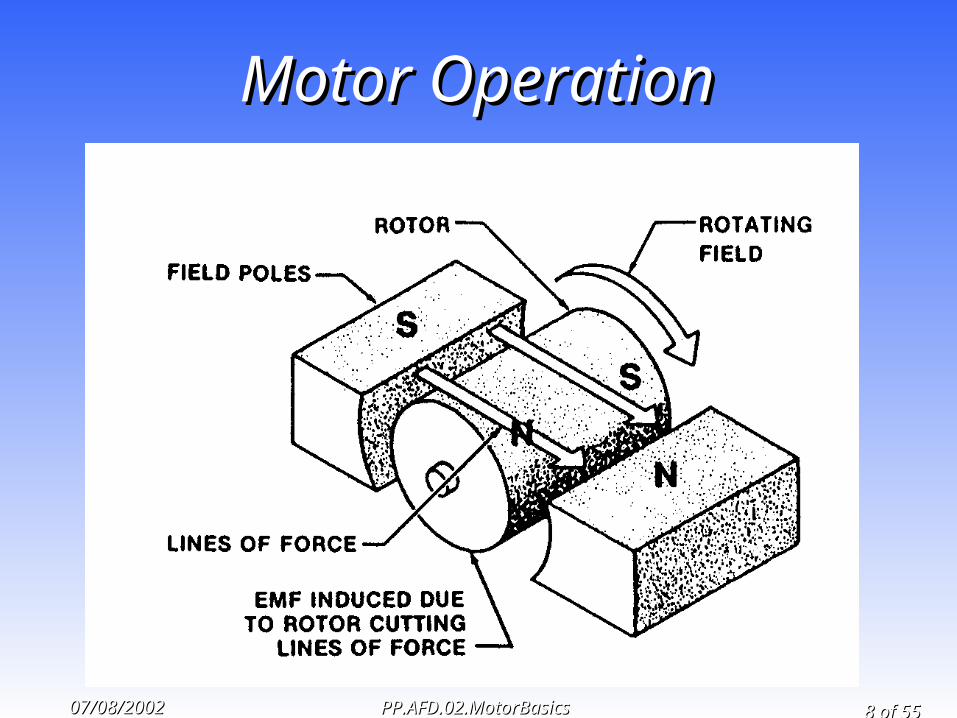
Motor OperationMotor Operation

99 of 55 of 55PP.AFD.02.MotorBasicsPP.AFD.02.MotorBasics07/08/200207/08/2002
Three Phase Motor ConstructionThree Phase Motor ConstructionT1T1
End ViewEnd View
T2T2
T2’T2’
T3T3
T1’T1’
T3’T3’
+
+
+
+ denotes current denotes current is moving away is moving away from youfrom you
denotes current denotes current is is moving moving towards youtowards you
1010 of 55 of 55PP.AFD.02.MotorBasicsPP.AFD.02.MotorBasics07/08/200207/08/2002
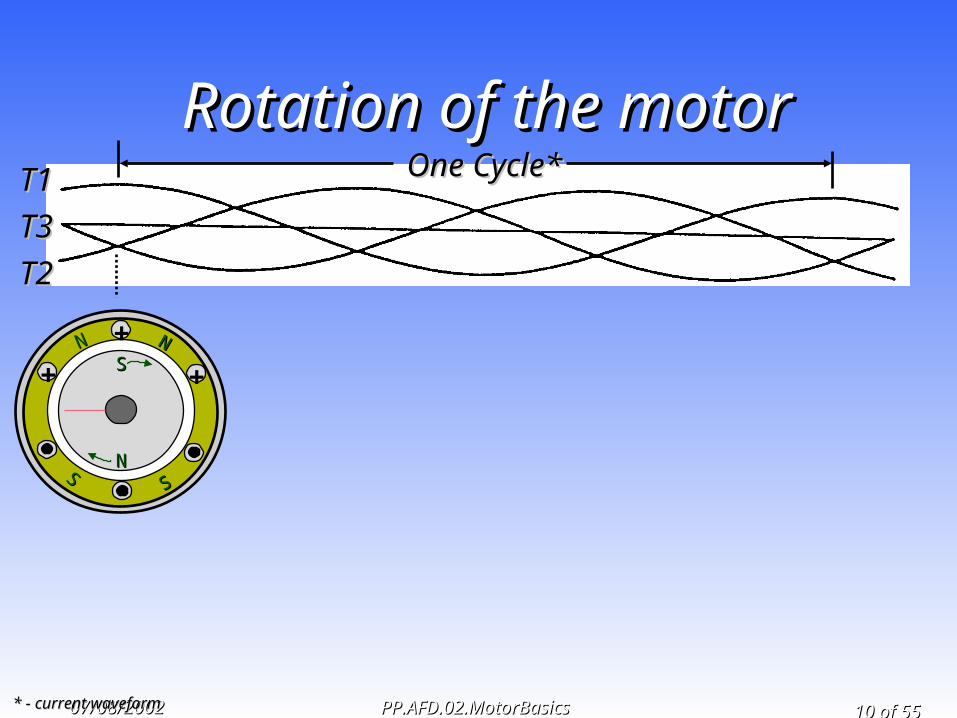
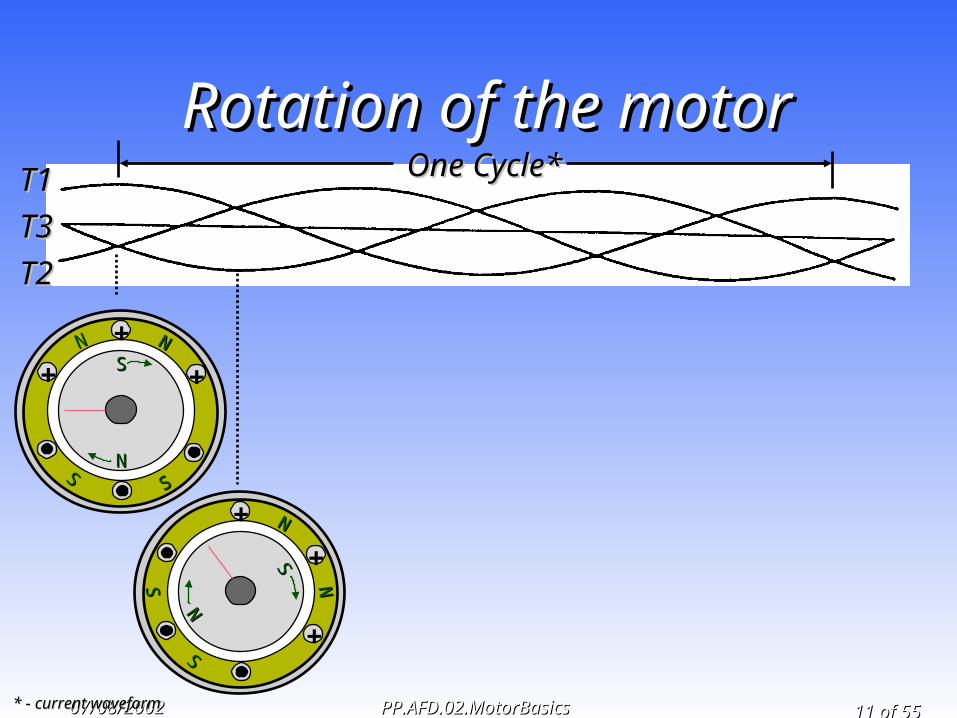
Rotation of the motorRotation of the motor
+
+
+NN NN
SSSS
SS
NN
T1T1
T3T3
T2T2
One Cycle*One Cycle*
* - current waveform* - current waveform
1111 of 55 of 55PP.AFD.02.MotorBasicsPP.AFD.02.MotorBasics07/08/200207/08/2002
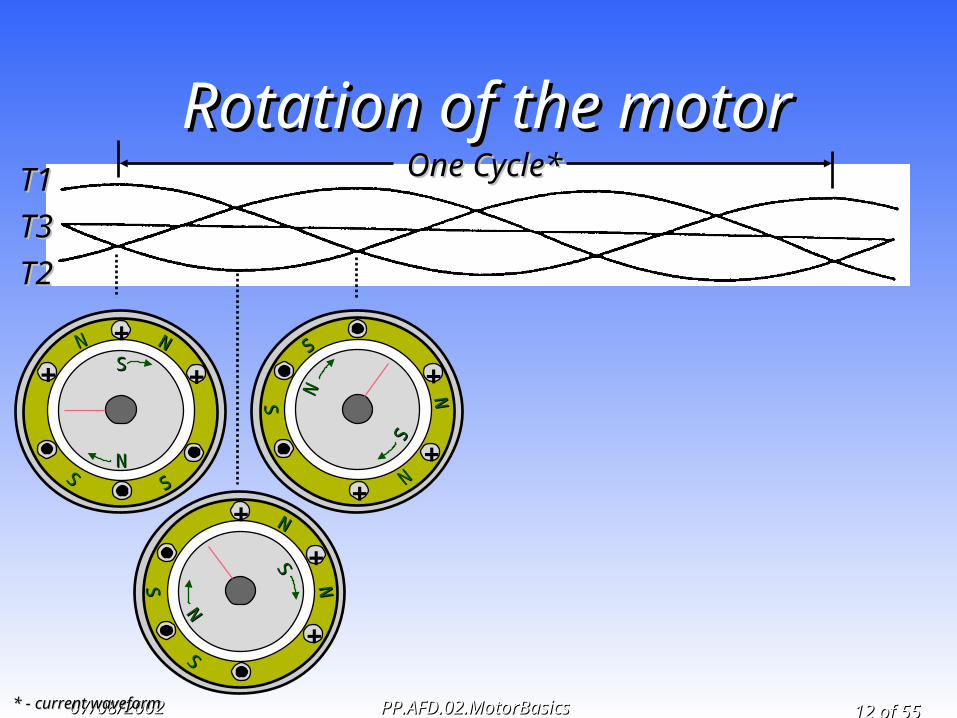
Rotation of the motorRotation of the motor
+
+
+
NNSS
NN
NN
SSSS
T1T1
T3T3
T2T2
One Cycle*One Cycle*
* - current waveform* - current waveform
+
+
+NN NN
SSSS
SS
NN
1212 of 55 of 55PP.AFD.02.MotorBasicsPP.AFD.02.MotorBasics07/08/200207/08/2002
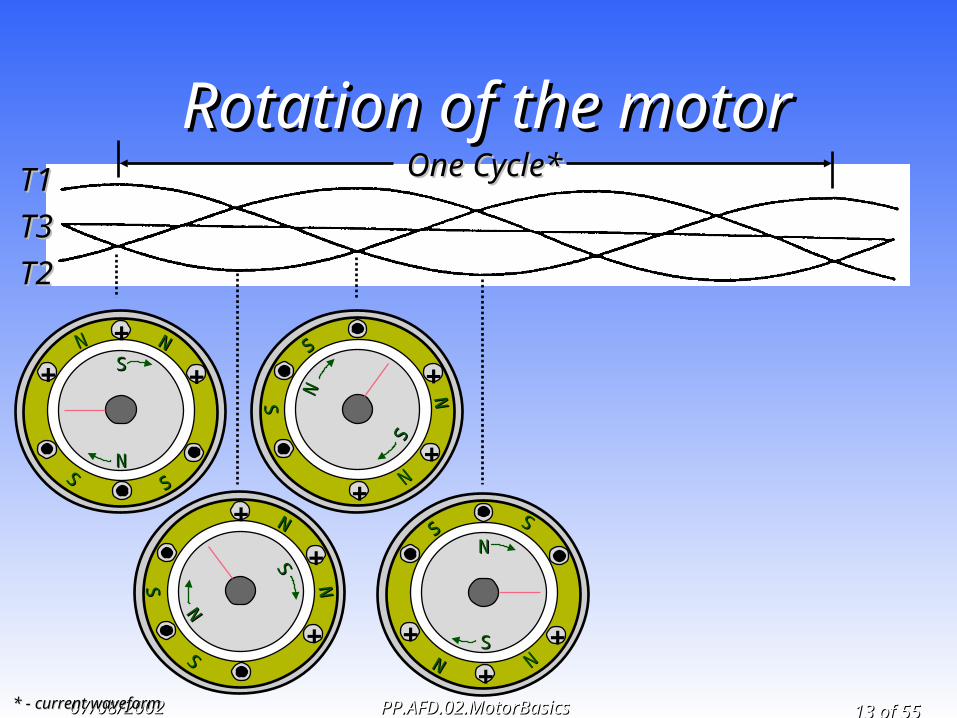
Rotation of the motorRotation of the motor
++
+
NN
NN
SS
SS
SS
NN
T1T1
T3T3
T2T2
One Cycle*One Cycle*
* - current waveform* - current waveform
+
+
+NN NN
SSSS
SS
NN
+
+
+
NNSS
NN
NN
SSSS
1313 of 55 of 55PP.AFD.02.MotorBasicsPP.AFD.02.MotorBasics07/08/200207/08/2002
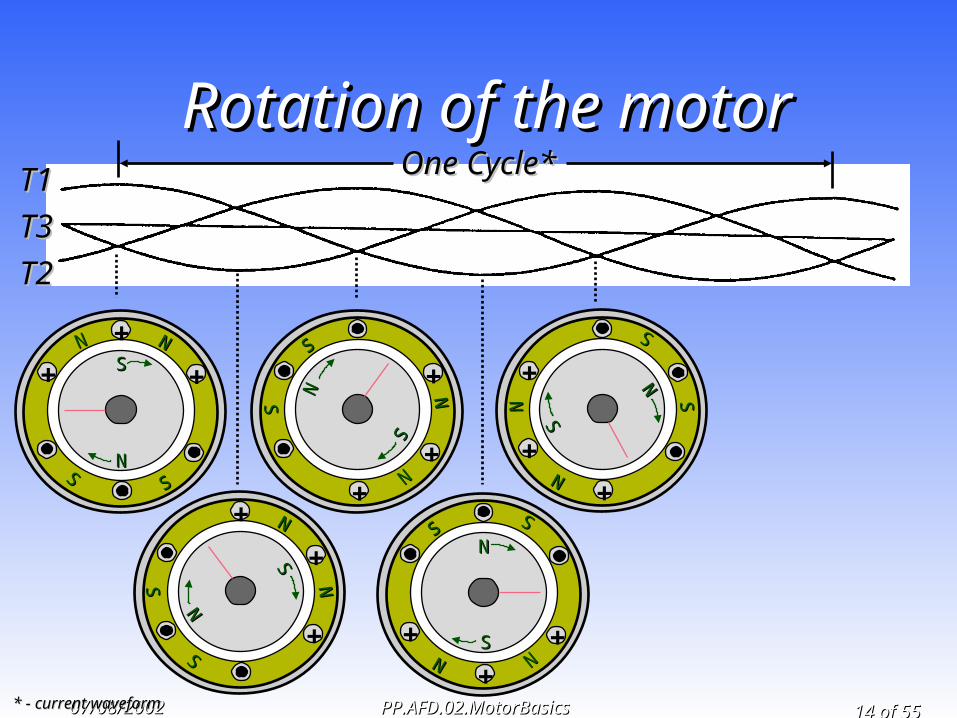
Rotation of the motorRotation of the motor
++
+NN
NN
SS
SS
SS
NN
T1T1
T3T3
T2T2
One Cycle*One Cycle*
* - current waveform* - current waveform
+
+
+NN NN
SSSS
SS
NN
+
+
+
NNSS
NN
NN
SSSS
++
+
NN
NN
SS
SS
SS
NN
1414 of 55 of 55PP.AFD.02.MotorBasicsPP.AFD.02.MotorBasics07/08/200207/08/2002
Rotation of the motorRotation of the motor
+
+
+NN
NN SS
SS
SS
NN
T1T1
T3T3
T2T2
One Cycle*One Cycle*
* - current waveform* - current waveform
+
+
+NN NN
SSSS
SS
NN
+
+
+
NNSS
NN
NN
SSSS
++
+
NN
NN
SS
SS
SS
NN+
+
+NN
NN
SS
SS
SS
NN
1515 of 55 of 55PP.AFD.02.MotorBasicsPP.AFD.02.MotorBasics07/08/200207/08/2002
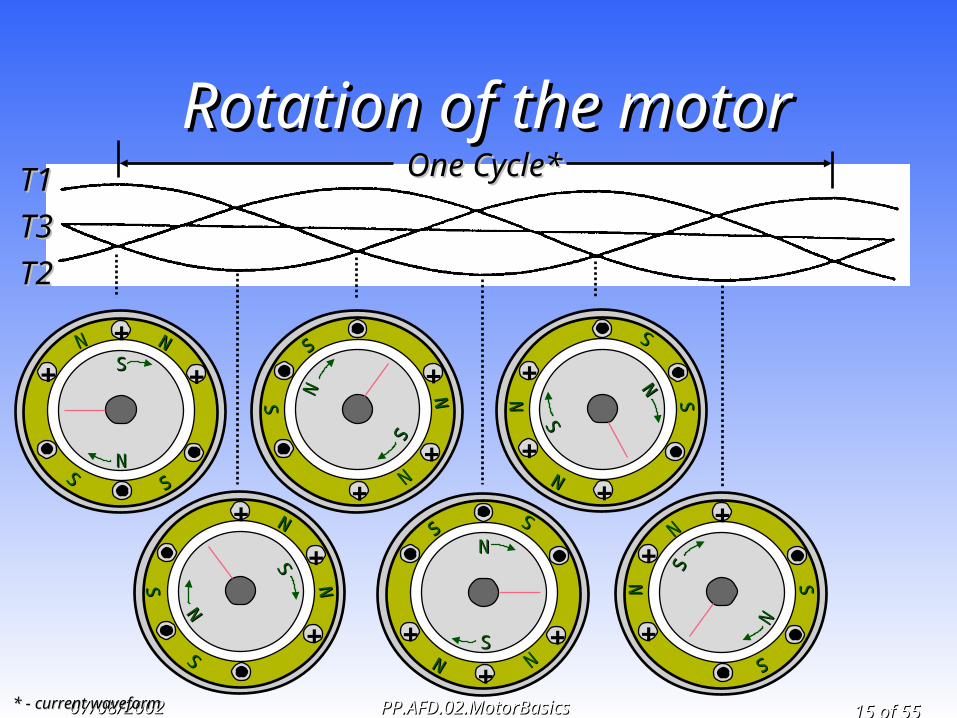
Rotation of the motorRotation of the motor
++
+
NN
NN SS
SS
SS
NN
T1T1
T3T3
T2T2
One Cycle*One Cycle*
* - current waveform* - current waveform
+
+
+NN NN
SSSS
SS
NN
+
+
+
NNSS
NN
NN
SSSS
++
+
NN
NN
SS
SS
SS
NN+
+
+NN
NN
SS
SS
SS
NN
+
+
+NN
NN SS
SS
SS
NN
1616 of 55 of 55PP.AFD.02.MotorBasicsPP.AFD.02.MotorBasics07/08/200207/08/2002
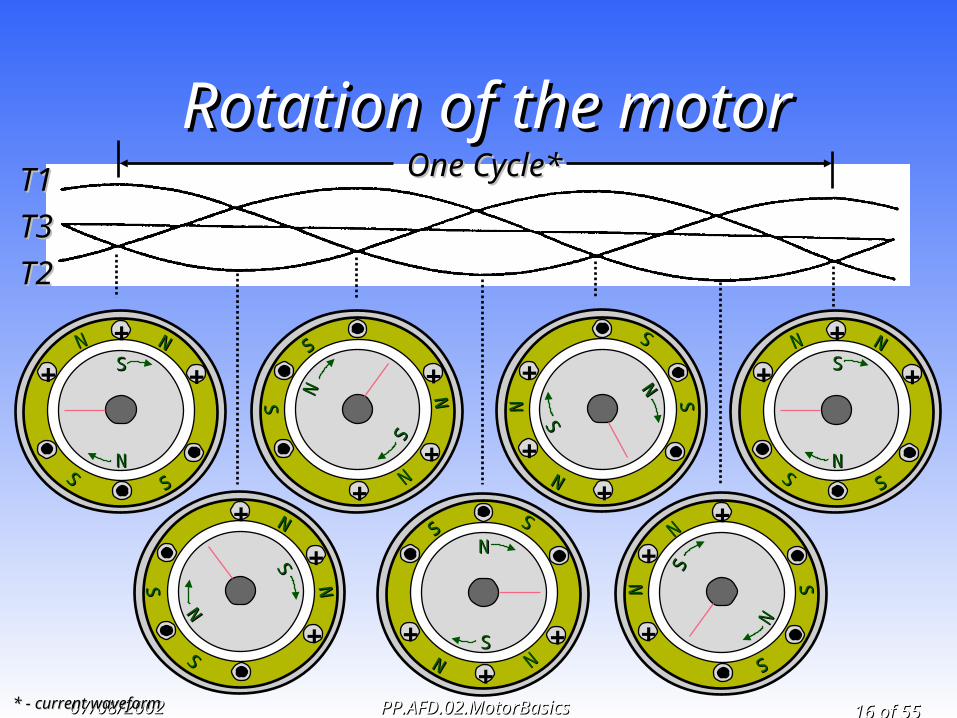
Rotation of the motorRotation of the motor
+
+
+NN NN
SSSS
SS
NN
T1T1
T3T3
T2T2
One Cycle*One Cycle*
* - current waveform* - current waveform
+
+
+NN NN
SSSS
SS
NN
+
+
+
NNSS
NN
NN
SSSS
++
+
NN
NN
SS
SS
SS
NN+
+
+NN
NN
SS
SS
SS
NN
+
+
+NN
NN SS
SS
SS
NN
++
+
NN
NN SS
SS
SS
NN
1717 of 55 of 55PP.AFD.02.MotorBasicsPP.AFD.02.MotorBasics07/08/200207/08/2002
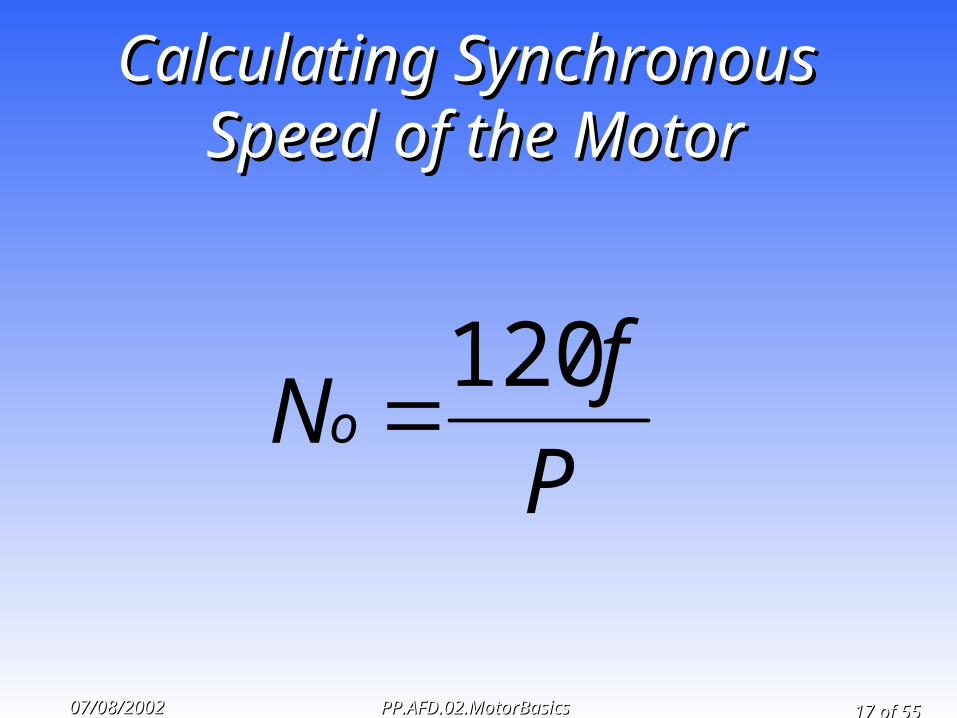
Calculating Synchronous Calculating Synchronous Speed of the MotorSpeed of the Motor
P
fNo
120
1818 of 55 of 55PP.AFD.02.MotorBasicsPP.AFD.02.MotorBasics07/08/200207/08/2002
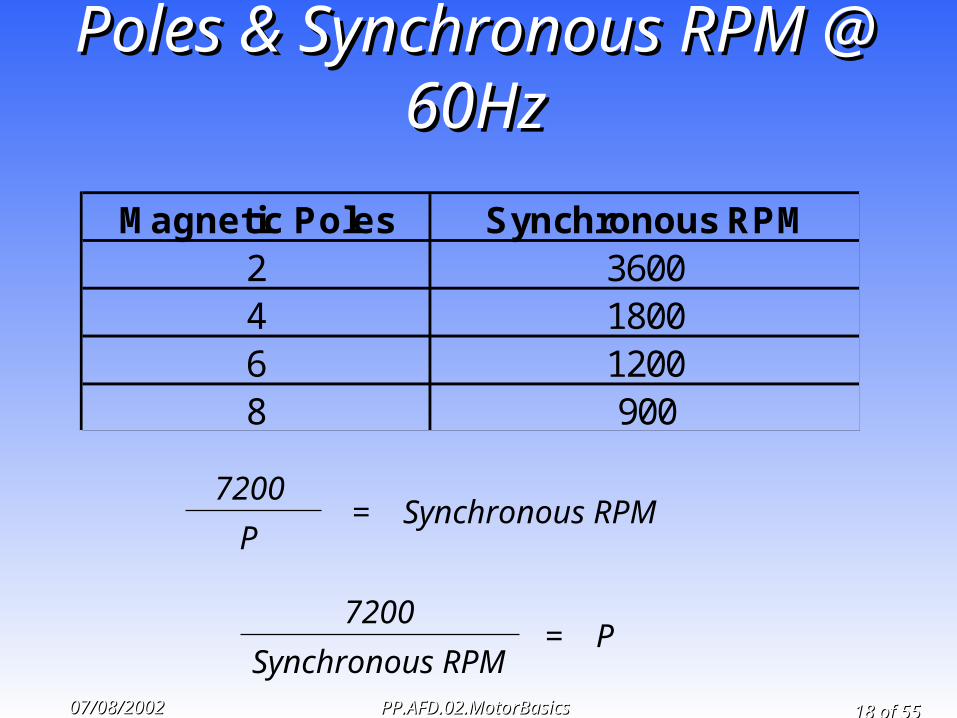
Poles & Synchronous RPM @ 60HzPoles & Synchronous RPM @ 60Hz
Magnetic Poles Synchronous RPM2 36004 18006 12008 900
7200= Synchronous RPM
P
7200= P
Synchronous RPM
1919 of 55 of 55PP.AFD.02.MotorBasicsPP.AFD.02.MotorBasics07/08/200207/08/2002
Three Phase Motor ConstructionThree Phase Motor ConstructionT1T1
End ViewEnd View
T2T2
T2’T2’
T3T3
T1’T1’
T3’T3’

2020 of 55 of 55PP.AFD.02.MotorBasicsPP.AFD.02.MotorBasics07/08/200207/08/2002
Three Phase Motor ConstructionThree Phase Motor ConstructionT1T1
End ViewEnd View
T2T2
T2’T2’
T3T3
T1’T1’
T3’T3’
2121 of 55 of 55PP.AFD.02.MotorBasicsPP.AFD.02.MotorBasics07/08/200207/08/2002
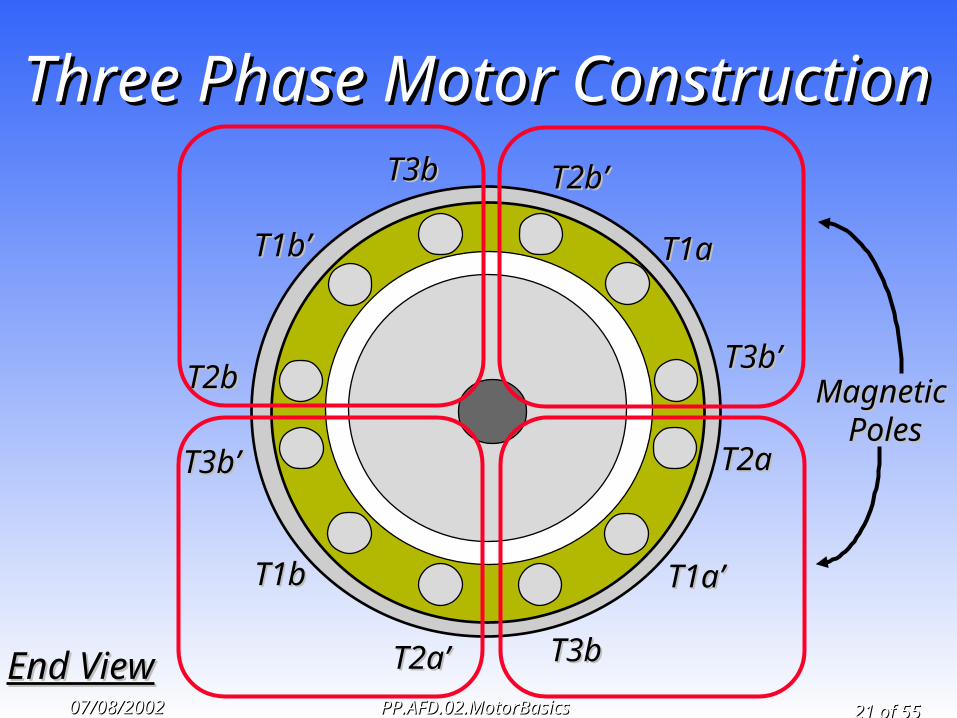
Three Phase Motor ConstructionThree Phase Motor Construction
End ViewEnd View
Magnetic Magnetic PolesPoles
T1aT1a
T2aT2a
T2a’T2a’
T1a’T1a’T1bT1b
T2bT2b
T2b’T2b’
T3bT3b
T1b’T1b’
T3b’T3b’
T3b’T3b’
T3bT3b

2222 of 55 of 55PP.AFD.02.MotorBasicsPP.AFD.02.MotorBasics07/08/200207/08/2002
What is Slip ? What is Slip ? To produce torque in an induction motor, current To produce torque in an induction motor, current must flow in the rotor. must flow in the rotor. To induce current flow in the rotor, the rotor To induce current flow in the rotor, the rotor speed must be slightly slower than the speed must be slightly slower than the synchronous speed. synchronous speed. The difference between the synchronous speed The difference between the synchronous speed and the rotor speed (rated and the rotor speed (rated speed) is called the slip. speed) is called the slip.
StatorStator
FluxFlux
RotorRotorSlipSlip

2323 of 55 of 55PP.AFD.02.MotorBasicsPP.AFD.02.MotorBasics07/08/200207/08/2002
Calculating Motor Rated SpeedCalculating Motor Rated SpeedFormula to find actual motor RPMFormula to find actual motor RPM
N =N =120 120 ff
PP( 1 - s )( 1 - s )
Where:Where:
N N - RPM of the motor- RPM of the motor
ff - Frequency in Hz- Frequency in Hz
PP - Number of poles of the motor- Number of poles of the motor
ss - (N- (Noo - N) / N - N) / Noo
2424 of 55 of 55PP.AFD.02.MotorBasicsPP.AFD.02.MotorBasics07/08/200207/08/2002
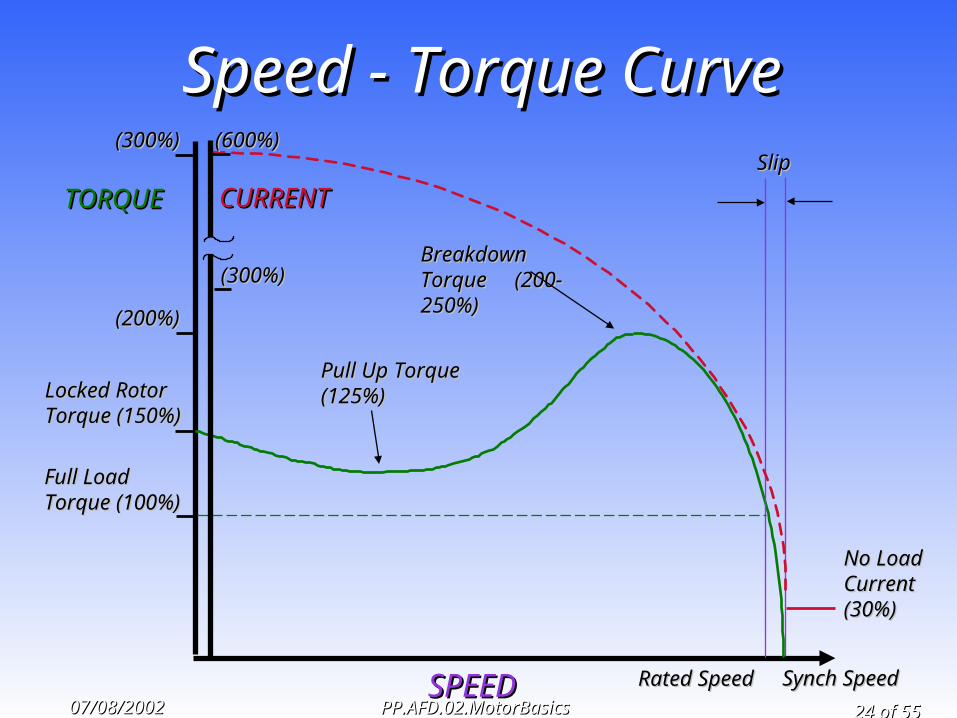
Speed - Torque Curve Speed - Torque Curve (600%)(600%)
Locked Rotor Locked Rotor Torque (150%)Torque (150%)
Full Load Full Load Torque (100%)Torque (100%)
Pull Up Torque Pull Up Torque (125%)(125%)
Breakdown Breakdown Torque Torque (200-250%)(200-250%)
Rated SpeedRated Speed Synch SpeedSynch SpeedSPEEDSPEED
TORQUETORQUE CURRENTCURRENT
No Load No Load Current Current (30%)(30%)
SlipSlip
(300%)(300%)
(300%)(300%)
(200%)(200%)

2525 of 55 of 55PP.AFD.02.MotorBasicsPP.AFD.02.MotorBasics07/08/200207/08/2002
Speed - Torque Curve Speed - Torque Curve
SPEEDSPEED
TORQUETORQUE
2626 of 55 of 55PP.AFD.02.MotorBasicsPP.AFD.02.MotorBasics07/08/200207/08/2002
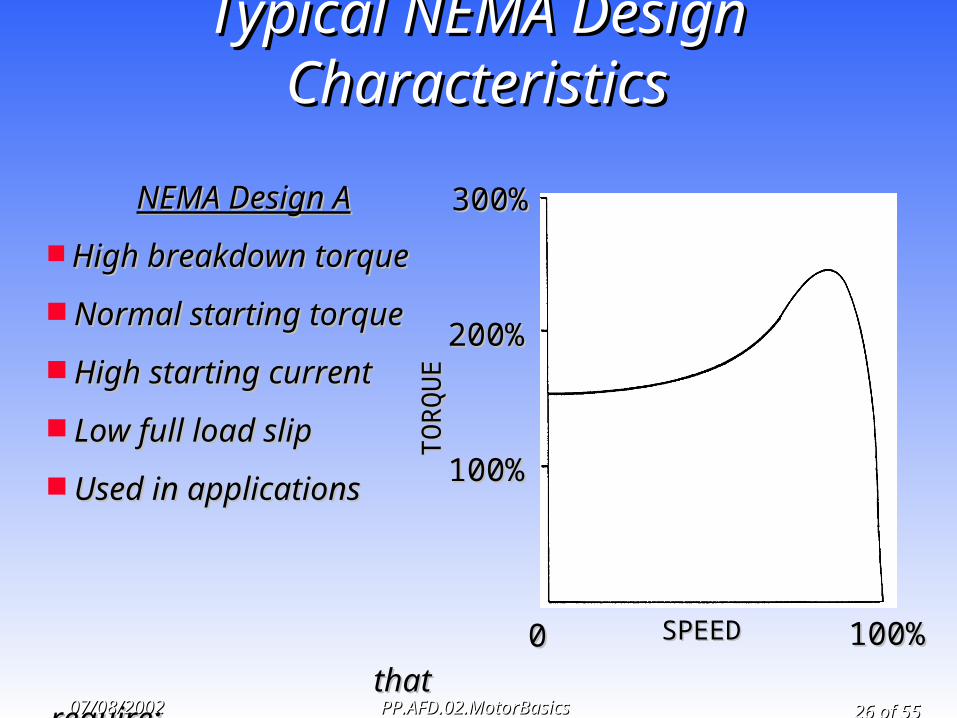
Typical NEMA Design CharacteristicsTypical NEMA Design Characteristics
00
100%100%
SPEEDSPEED
TO
RQ
UE
TO
RQ
UE 200%200%
300%300%
100%100%
NEMA Design ANEMA Design A
High breakdown torqueHigh breakdown torque
Normal starting torqueNormal starting torque
High starting currentHigh starting current
Low full load slipLow full load slip
Used in applications Used in applications that require: that require:
Occasional overloadsOccasional overloads
Better efficiencyBetter efficiency
2727 of 55 of 55PP.AFD.02.MotorBasicsPP.AFD.02.MotorBasics07/08/200207/08/2002
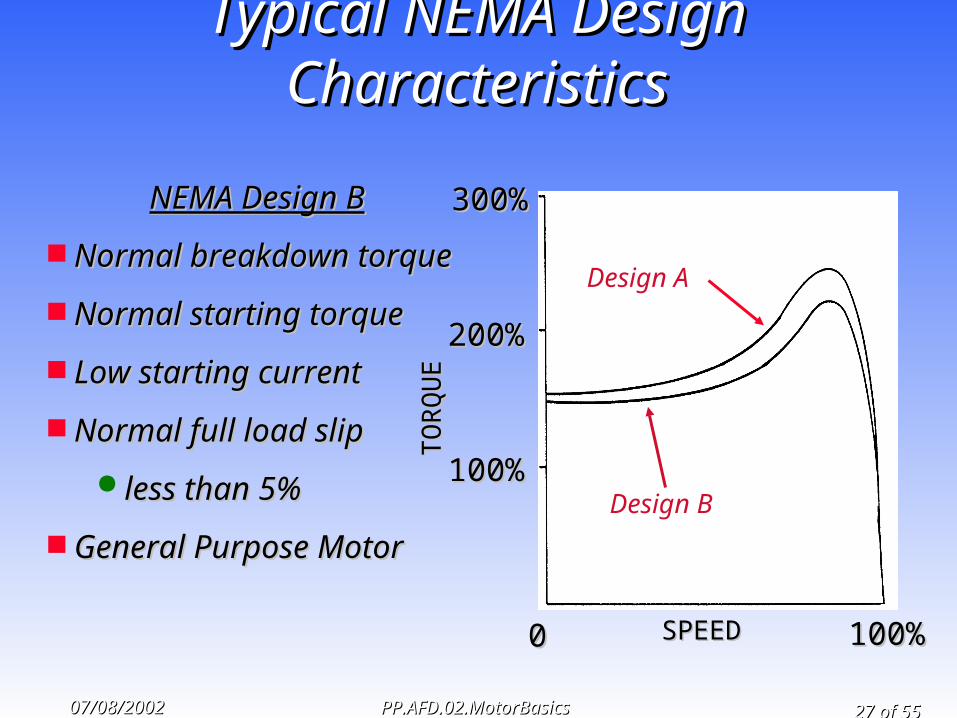
Typical NEMA Design CharacteristicsTypical NEMA Design Characteristics
00
100%100%
SPEEDSPEED
TO
RQ
UE
TO
RQ
UE 200%200%
300%300%
100%100%
Design B
NEMA Design BNEMA Design B
Normal breakdown torqueNormal breakdown torque
Normal starting torqueNormal starting torque
Low starting currentLow starting current
Normal full load slipNormal full load slip
less than 5%less than 5%
General Purpose Motor General Purpose Motor
Design A
2828 of 55 of 55PP.AFD.02.MotorBasicsPP.AFD.02.MotorBasics07/08/200207/08/2002
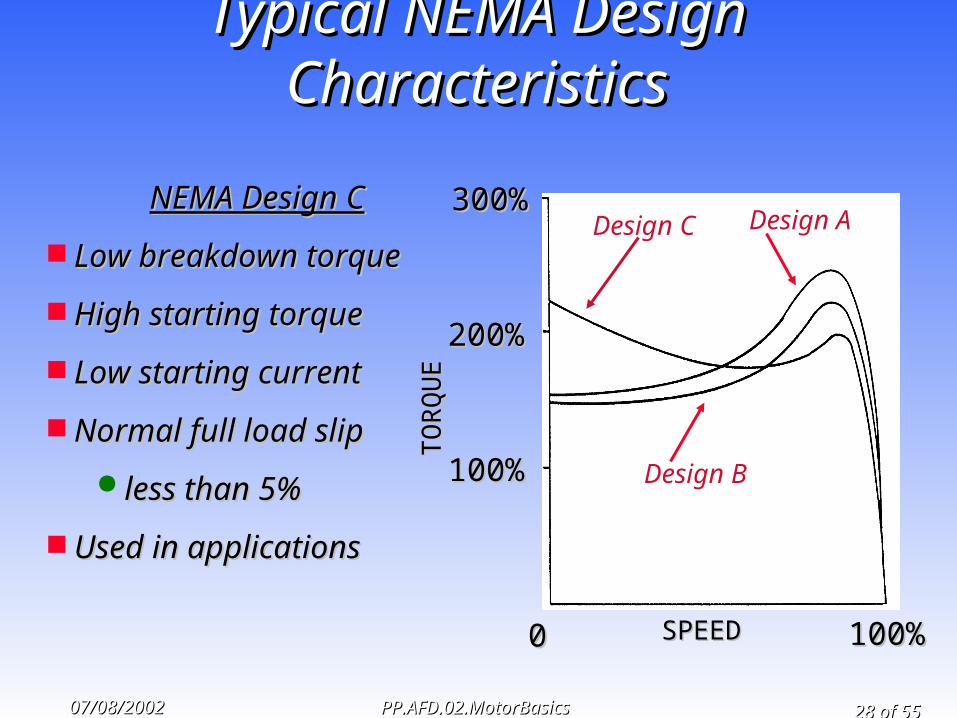
Typical NEMA Design CharacteristicsTypical NEMA Design Characteristics
00
100%100%
SPEEDSPEED
TO
RQ
UE
TO
RQ
UE 200%200%
300%300%
100%100%
Design CNEMA Design CNEMA Design C
Low breakdown torqueLow breakdown torque
High starting torqueHigh starting torque
Low starting currentLow starting current
Normal full load slipNormal full load slip
less than 5%less than 5%
Used in applications Used in applications that that require:require:
high breakaway torquehigh breakaway torque
Design A
Design B
2929 of 55 of 55PP.AFD.02.MotorBasicsPP.AFD.02.MotorBasics07/08/200207/08/2002
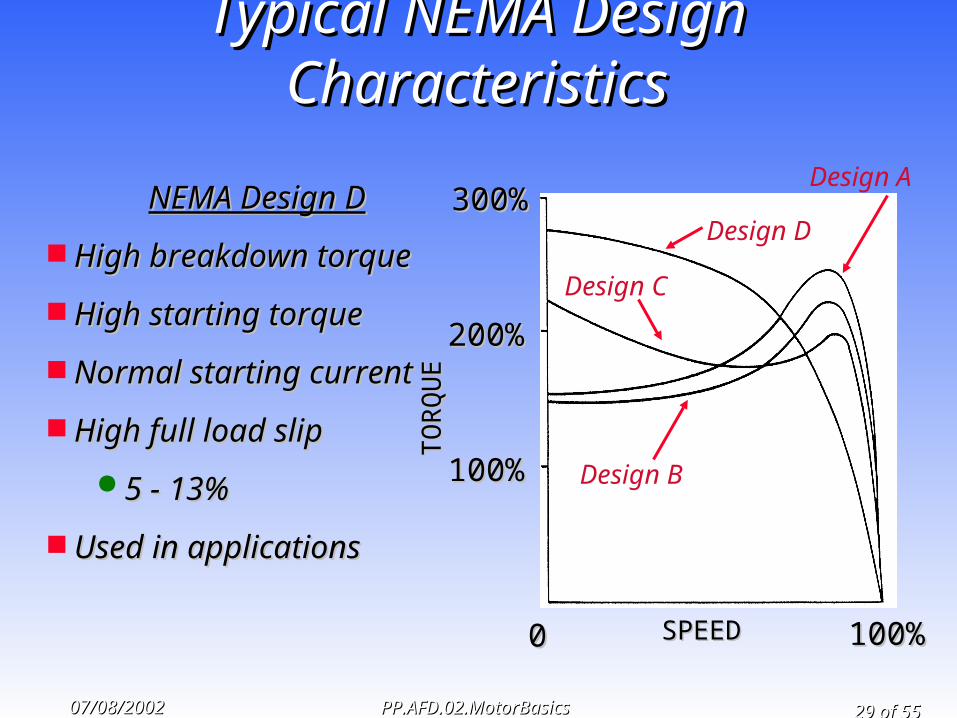
Typical NEMA Design CharacteristicsTypical NEMA Design Characteristics
00
100%100%
SPEEDSPEED
TO
RQ
UE
TO
RQ
UE 200%200%
300%300%
100%100%
Design DNEMA Design DNEMA Design D
High breakdown torqueHigh breakdown torque
High starting torqueHigh starting torque
Normal starting currentNormal starting current
High full load slipHigh full load slip
5 - 13%5 - 13%
Used in applications Used in applications that that require:require:
high breakaway torquehigh breakaway torque
Design C
Design A
Design B
3030 of 55 of 55PP.AFD.02.MotorBasicsPP.AFD.02.MotorBasics07/08/200207/08/2002
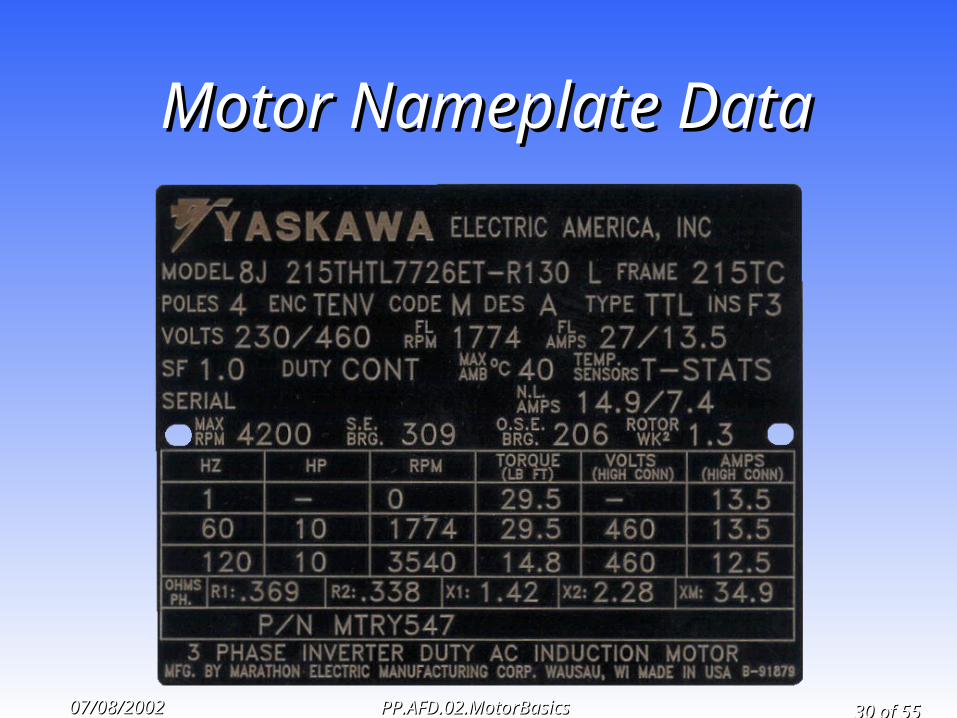
Motor Nameplate DataMotor Nameplate Data

3131 of 55 of 55PP.AFD.02.MotorBasicsPP.AFD.02.MotorBasics07/08/200207/08/2002
Understanding the NameplateUnderstanding the NameplateHP- HorsepowerHP- Horsepower
The horsepower The horsepower figure stamped on figure stamped on the nameplate is the nameplate is the the horsepower the horsepower the motor is rated motor is rated to to develop when develop when connected to a connected to a circuit circuit of the of the voltage, voltage, frequency and frequency and number of phases number of phases specified on the specified on the motor nameplate.motor nameplate.
3232 of 55 of 55PP.AFD.02.MotorBasicsPP.AFD.02.MotorBasics07/08/200207/08/2002
Rotational Horsepower FormulaRotational Horsepower Formula
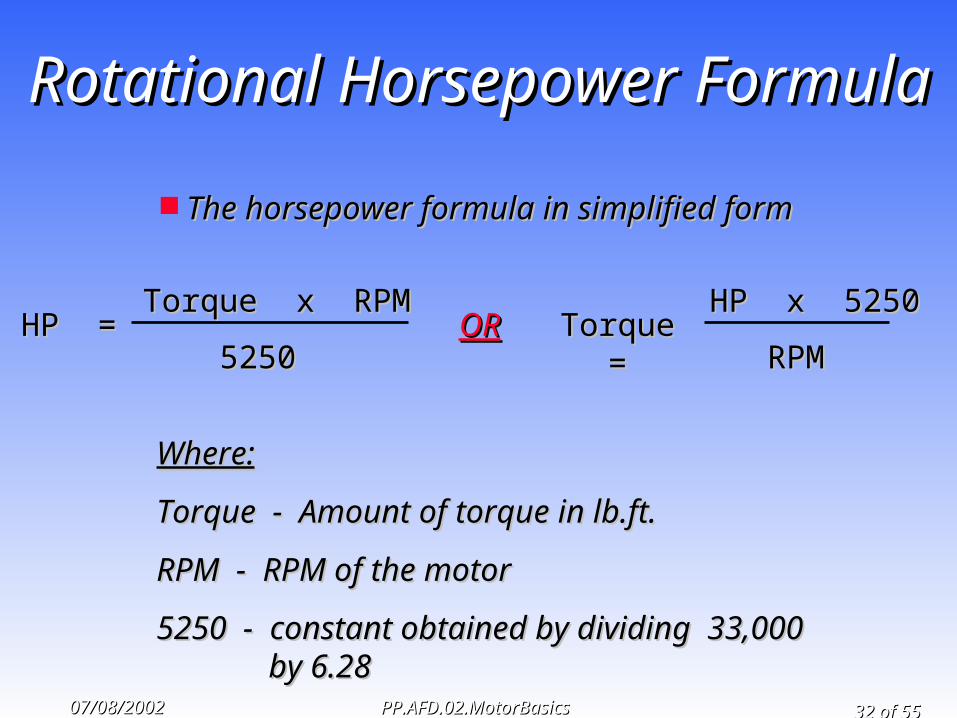
The horsepower formula in simplified formThe horsepower formula in simplified form
HP = HP = Torque x RPMTorque x RPM
52505250
Where:Where:
Torque - Amount of torque in lb.ft.Torque - Amount of torque in lb.ft.
RPM - RPM of the motorRPM - RPM of the motor
5250 - constant obtained by dividing 33,000 5250 - constant obtained by dividing 33,000 by 6.28 by 6.28
HP x 5250HP x 5250
RPMRPMTorque = Torque = OROR

3333 of 55 of 55PP.AFD.02.MotorBasicsPP.AFD.02.MotorBasics07/08/200207/08/2002
Understanding the NameplateUnderstanding the Nameplate
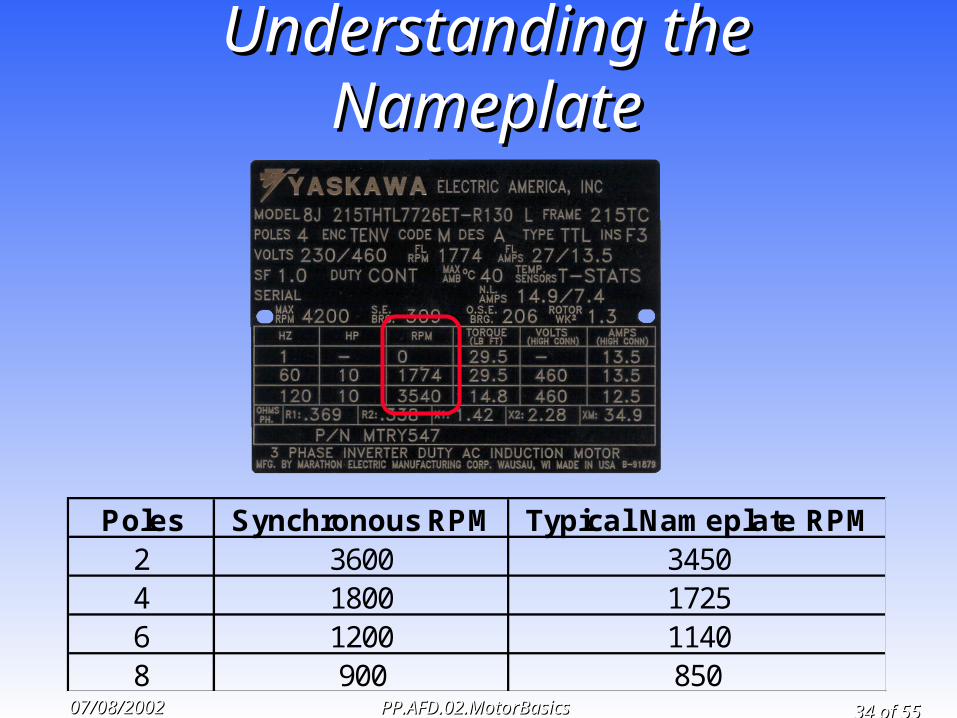
RPM - Revolutions per MinuteRPM - Revolutions per Minute
The RPM value represents The RPM value represents the approximate speed at the approximate speed at which the motor will run when which the motor will run when properly connected and properly connected and delivering its rated outputdelivering its rated output
3434 of 55 of 55PP.AFD.02.MotorBasicsPP.AFD.02.MotorBasics07/08/200207/08/2002
Understanding the NameplateUnderstanding the Nameplate
Poles Synchronous RPM Typical Nameplate RPM2 3600 34504 1800 17256 1200 11408 900 850
3535 of 55 of 55PP.AFD.02.MotorBasicsPP.AFD.02.MotorBasics07/08/200207/08/2002
Understanding the NameplateUnderstanding the Nameplate
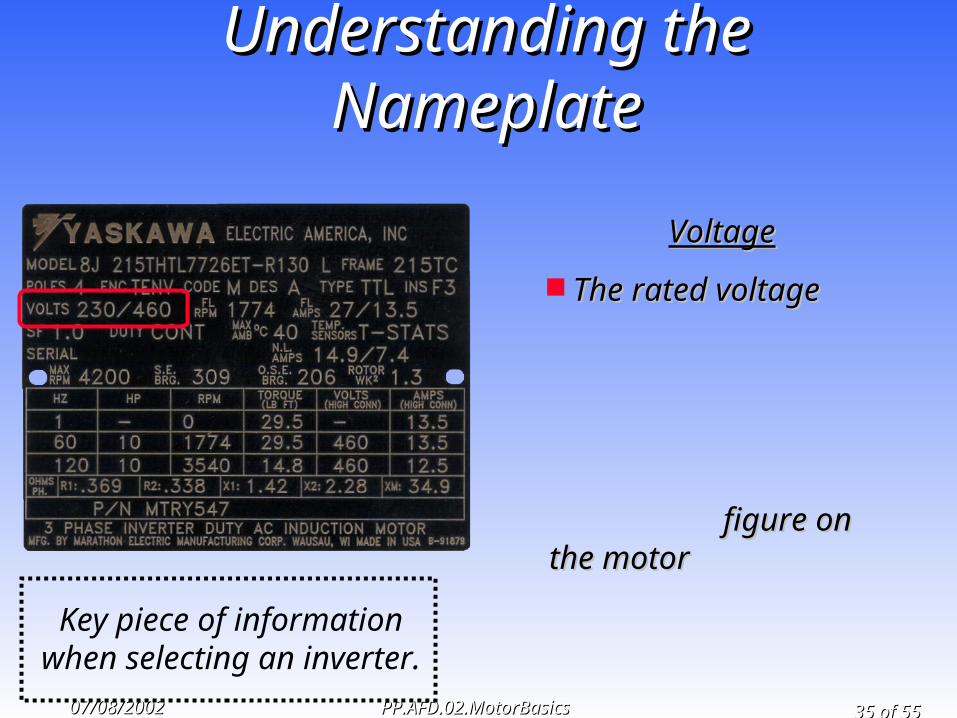
VoltageVoltage
The rated voltage The rated voltage figure on the motor figure on the motor nameplate refers to nameplate refers to the the voltage of the voltage of the supply supply circuit to circuit to which the which the motor motor should be should be connected, connected, to produce to produce rated rated horsepower and horsepower and RPM. RPM.
Key piece of information when selecting an inverter.

3636 of 55 of 55PP.AFD.02.MotorBasicsPP.AFD.02.MotorBasics07/08/200207/08/2002
Effects of Voltage Variation Effects of Voltage Variation on the Motor at 60Hzon the Motor at 60Hz
Low VoltageLow Voltage Higher than normal currentHigher than normal current Higher than normal motor Higher than normal motor temperaturetemperature
High VoltageHigh Voltage Higher than normal currentHigher than normal current Lower than normal power Lower than normal power factor factor

3737 of 55 of 55PP.AFD.02.MotorBasicsPP.AFD.02.MotorBasics07/08/200207/08/2002
Understanding the NameplateUnderstanding the Nameplate
PhasePhase
The phase figure on The phase figure on the the motor nameplate motor nameplate describes the describes the alternating current alternating current system that system that the motor the motor has been designed for. has been designed for.
Key piece of information when selecting an inverter.
3838 of 55 of 55PP.AFD.02.MotorBasicsPP.AFD.02.MotorBasics07/08/200207/08/2002
Understanding the NameplateUnderstanding the Nameplate
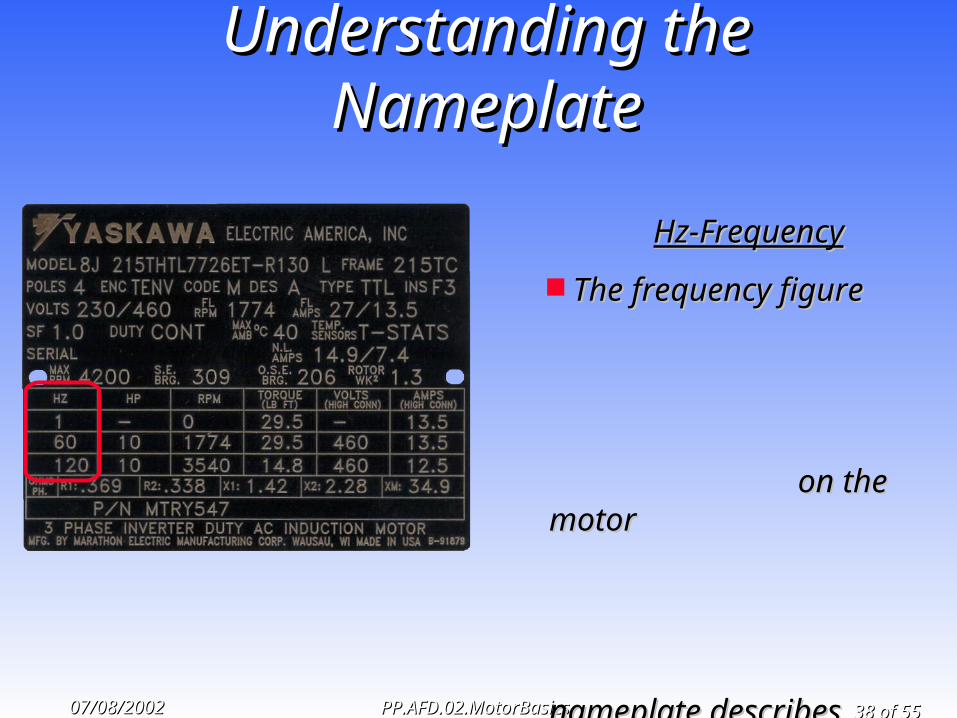
Hz-FrequencyHz-Frequency
The frequency figure The frequency figure on the motor on the motor nameplate nameplate describes describes the the alternating alternating current current system system frequency frequency that must that must be applied be applied to the to the motor to motor to achieve achieve rated rated speed and speed and horsepower.horsepower.
3939 of 55 of 55PP.AFD.02.MotorBasicsPP.AFD.02.MotorBasics07/08/200207/08/2002
Understanding the NameplateUnderstanding the Nameplate
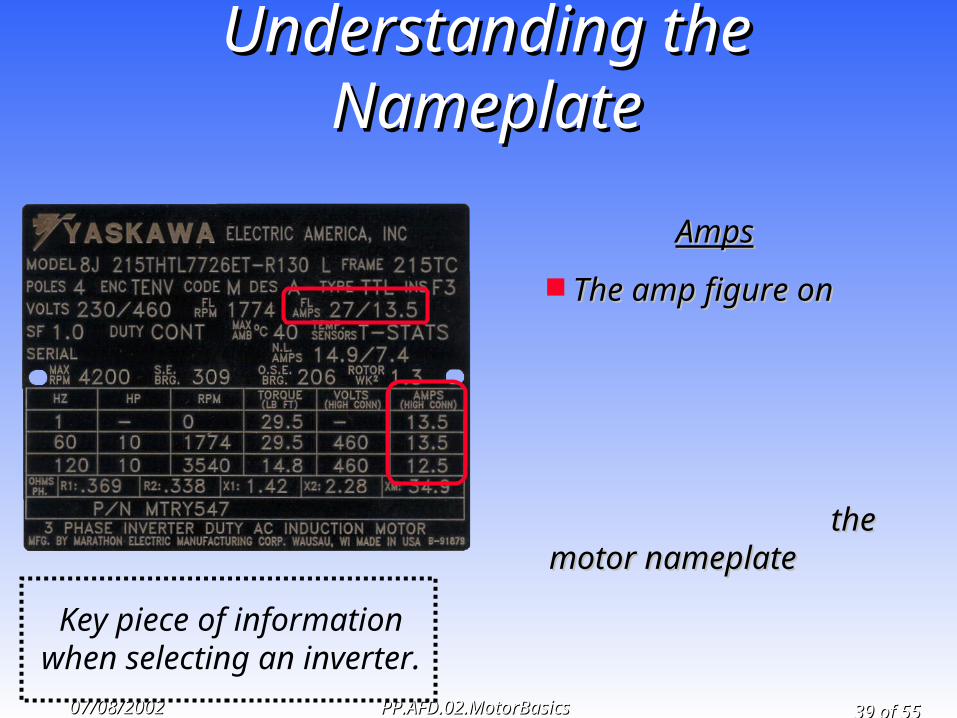
AmpsAmps
The amp figure on The amp figure on the motor the motor nameplate nameplate represents the represents the approximate current approximate current draw by the motor draw by the motor when developing when developing rated horsepower on rated horsepower on a circuit of the a circuit of the voltage and voltage and frequency specified frequency specified on the nameplate. on the nameplate.
Key piece of information when selecting an inverter.
4040 of 55 of 55PP.AFD.02.MotorBasicsPP.AFD.02.MotorBasics07/08/200207/08/2002
Understanding the NameplateUnderstanding the Nameplate
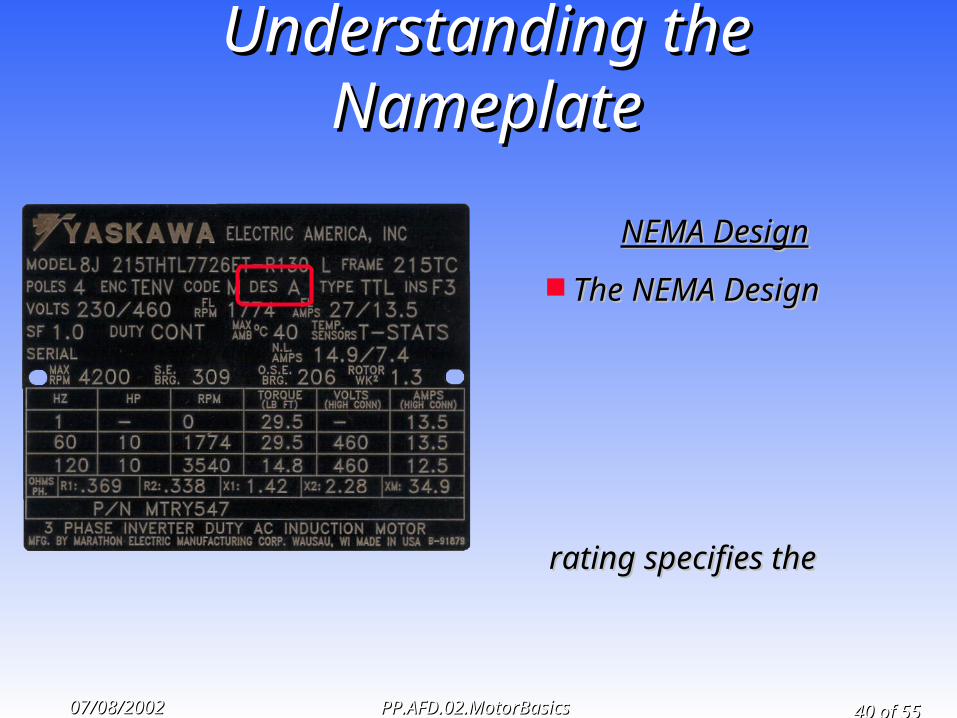
NEMA DesignNEMA Design
The NEMA Design The NEMA Design rating specifies rating specifies the the speed torque speed torque curve curve that will be that will be produced produced by the by the motor.motor.

4141 of 55 of 55PP.AFD.02.MotorBasicsPP.AFD.02.MotorBasics07/08/200207/08/2002
Understanding the NameplateUnderstanding the Nameplate
Insulation ClassInsulation Class
The insulation class The insulation class letter designates letter designates the the amount of amount of allowable allowable temperature rise temperature rise based on the based on the insulation system insulation system and the motor and the motor service factor.service factor.

4242 of 55 of 55PP.AFD.02.MotorBasicsPP.AFD.02.MotorBasics07/08/200207/08/2002
Insulation Class InformationInsulation Class Information Most common insulation classes are class B and FMost common insulation classes are class B and F
Insulation Class Ambient Temp. Temp. Rise Total Temp.
A 40oC 65oC 105oC
B 40oC 90oC 130oC
F 40oC 115oC 155oC
H 40oC 140oC 180oC

4343 of 55 of 55PP.AFD.02.MotorBasicsPP.AFD.02.MotorBasics07/08/200207/08/2002
Understanding the NameplateUnderstanding the NameplateS.F. - Service FactorS.F. - Service Factor
The number by which The number by which the horsepower rating is the horsepower rating is multiplied to determine multiplied to determine the maximum safe load the maximum safe load that a motor may be that a motor may be expected to carry expected to carry continuously continuously Example - a 10HP motor with a Example - a 10HP motor with a service factor of 1.15 will service factor of 1.15 will deliver 11.5 horsepower deliver 11.5 horsepower continuously without continuously without exceeding exceeding the allowable the allowable temperature rise temperature rise of its of its insulation classinsulation class
4444 of 55 of 55PP.AFD.02.MotorBasicsPP.AFD.02.MotorBasics07/08/200207/08/2002
Understanding the NameplateUnderstanding the Nameplate
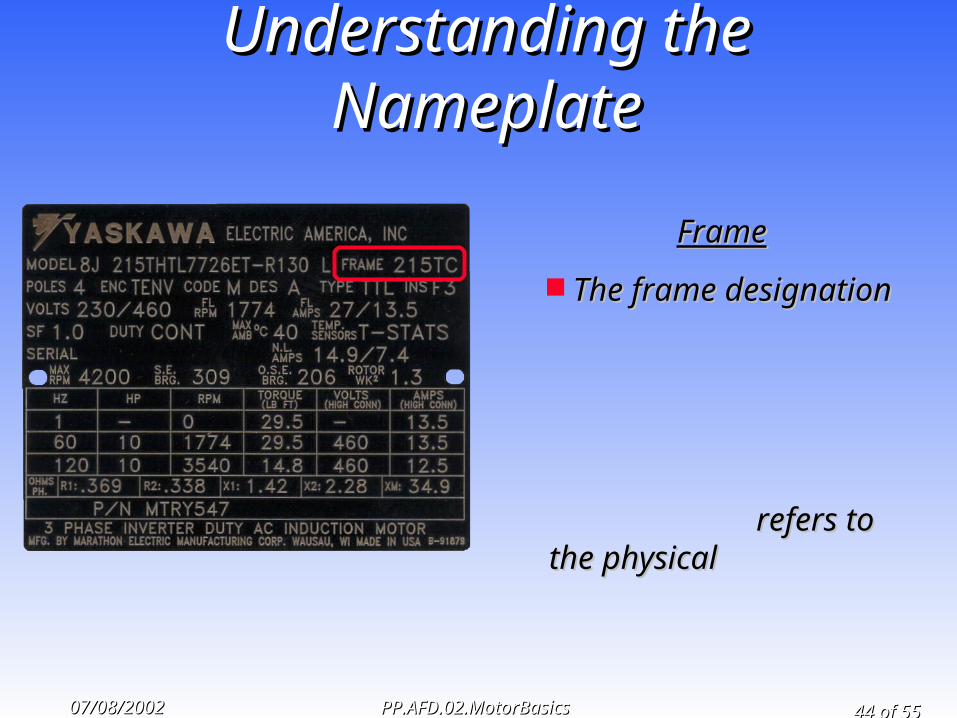
FrameFrame
The frame designation The frame designation refers to the physical refers to the physical size of the motor as size of the motor as well well as certain as certain construction features construction features such as the shaft and such as the shaft and mounting dimensions.mounting dimensions.
4545 of 55 of 55PP.AFD.02.MotorBasicsPP.AFD.02.MotorBasics07/08/200207/08/2002
Types of Motor EnclosuresTypes of Motor Enclosures
Open Drip-proof (ODP)Open Drip-proof (ODP) Totally enclosed non-ventilated (TENV)Totally enclosed non-ventilated (TENV) Totally enclosed fan cooled (TEFC)Totally enclosed fan cooled (TEFC) Totally enclosed blower cooled (TEBC)Totally enclosed blower cooled (TEBC)

4646 of 55 of 55PP.AFD.02.MotorBasicsPP.AFD.02.MotorBasics07/08/200207/08/2002
Types of Motor EnclosuresTypes of Motor Enclosures
ODPODP Open drip-proofOpen drip-proof Ventilating openings Ventilating openings
permit passage of permit passage of external cooling air over external cooling air over and around the and around the windings of the motor. windings of the motor. Small degree of Small degree of protection against liquid protection against liquid or solid particles or solid particles entering the enclosure.entering the enclosure.
4747 of 55 of 55PP.AFD.02.MotorBasicsPP.AFD.02.MotorBasics07/08/200207/08/2002
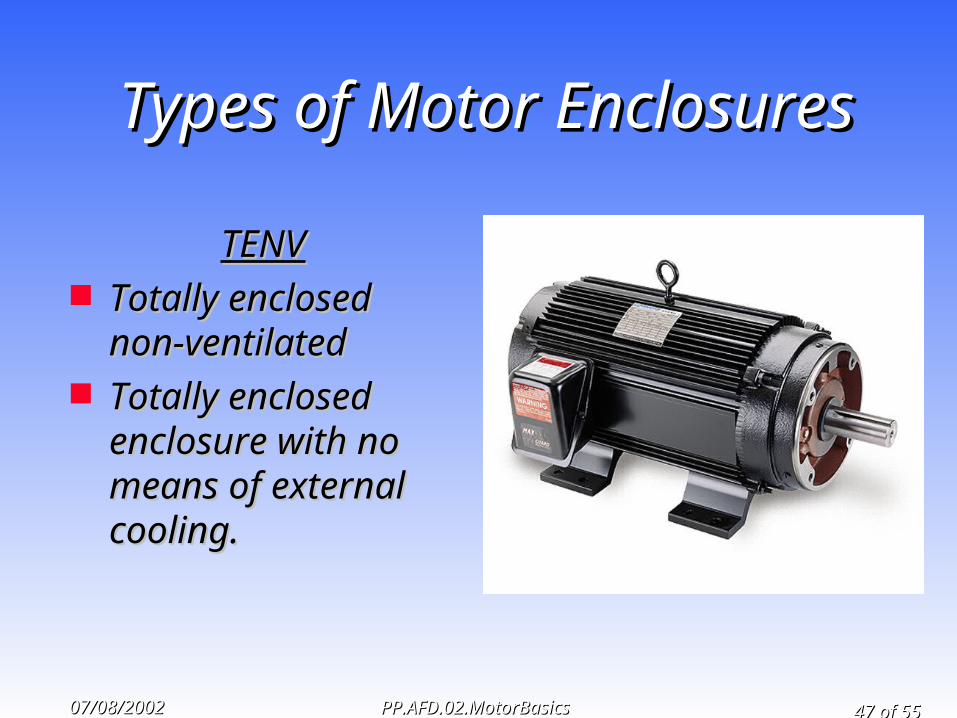
Types of Motor EnclosuresTypes of Motor Enclosures
TENVTENV Totally enclosed Totally enclosed
non-ventilatednon-ventilated Totally enclosed Totally enclosed
enclosure with no enclosure with no means of external means of external cooling.cooling.
4848 of 55 of 55PP.AFD.02.MotorBasicsPP.AFD.02.MotorBasics07/08/200207/08/2002
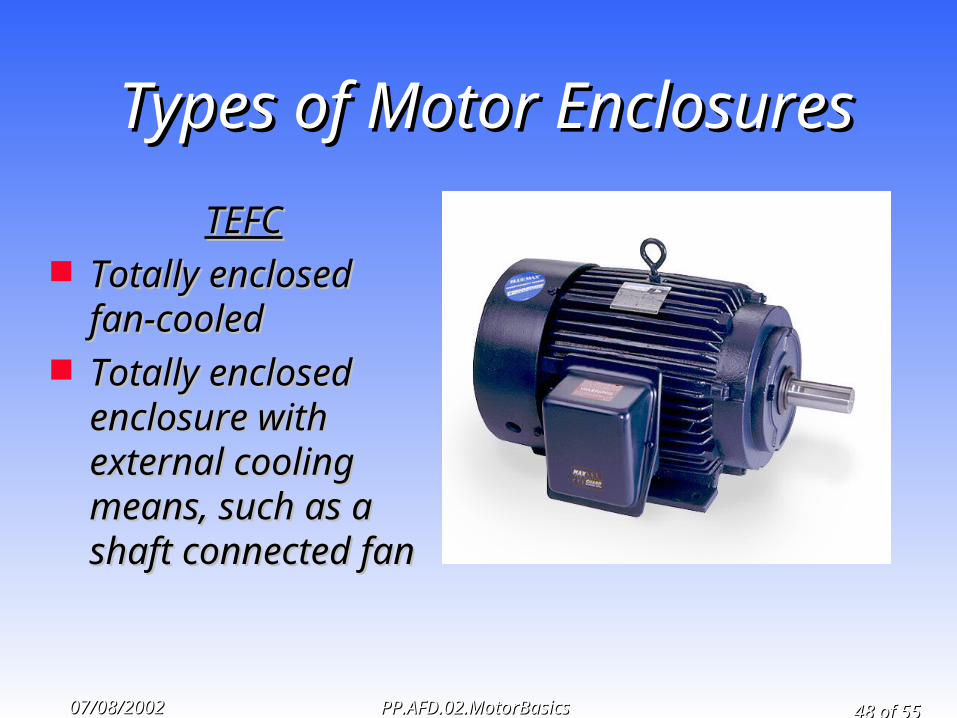
Types of Motor EnclosuresTypes of Motor Enclosures
TEFCTEFC Totally enclosed Totally enclosed
fan-cooledfan-cooled Totally enclosed Totally enclosed
enclosure with enclosure with external cooling external cooling means, such as a means, such as a shaft connected fanshaft connected fan
4949 of 55 of 55PP.AFD.02.MotorBasicsPP.AFD.02.MotorBasics07/08/200207/08/2002
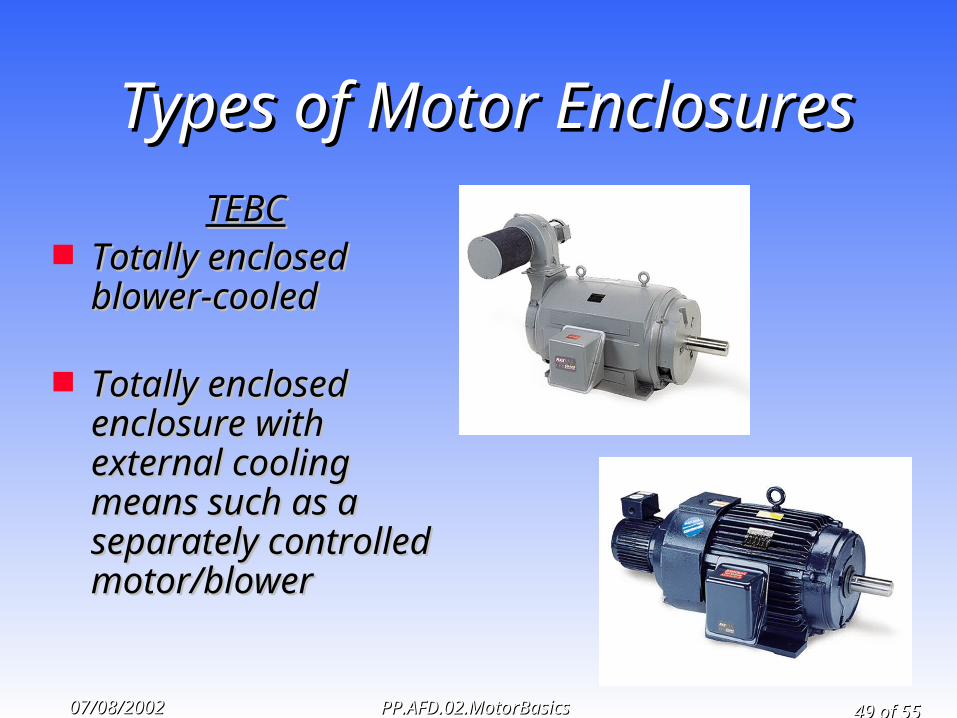
Types of Motor EnclosuresTypes of Motor Enclosures
TEBCTEBC Totally enclosed Totally enclosed
blower-cooledblower-cooled
Totally enclosed Totally enclosed enclosure with enclosure with external cooling external cooling means such as a means such as a separately controlled separately controlled motor/blowermotor/blower

5050 of 55 of 55PP.AFD.02.MotorBasicsPP.AFD.02.MotorBasics07/08/200207/08/2002
TEFC Speed RangesTEFC Speed Ranges
Constant TorqueConstant Torque 4:14:1 (15-60 Hz)(15-60 Hz)
Constant TorqueConstant Torque 10:110:1 (6-60 Hz)(6-60 Hz)
Variable TorqueVariable Torque 1-60 Hz 1-60 Hz 2:1 (30-60 Hz) CT 2:1 (30-60 Hz) CT
5151 of 55 of 55PP.AFD.02.MotorBasicsPP.AFD.02.MotorBasics07/08/200207/08/2002
TENV/TEBC Speed RangesTENV/TEBC Speed Ranges
Constant TorqueConstant Torque 0 to Base Speed0 to Base Speed100:1100:1 (0.6-60 (0.6-60
Hz)Hz)1000:11000:1 (0.06-60 (0.06-60
Hz)Hz)
5252 of 55 of 55PP.AFD.02.MotorBasicsPP.AFD.02.MotorBasics07/08/200207/08/2002
Motor Retrofit SummaryMotor Retrofit Summary
RPMRPM VoltsVolts PhasePhase AmpsAmps NEMA DesignNEMA Design Frame + any prefix Frame + any prefix
or suffix letter codesor suffix letter codes
LocationLocation Mounting OrientationMounting Orientation ApplicationApplication Enclosure StyleEnclosure Style Motor Control MethodMotor Control Method
Inverter-Duty?Inverter-Duty?

5353 of 55 of 55PP.AFD.02.MotorBasicsPP.AFD.02.MotorBasics07/08/200207/08/2002
Motor Basics ExerciseMotor Basics Exercise Answer the following questions using your knowledge and/or the documents from this class.
1.) Write down the formula to calculate synchronous motor speed (please use the simplified form).
2.) To calculate the actual motor speed what has to be included in the above formula ?
3.) The majority of electric motors used in general purpose applications in industry today are what NEMA design ?
4.) A NEMA design D motor is characterized by very high breakdown torque, and a large percentage of slip ? (True or False)
5.) Name the two pieces of information needed off the motor nameplate when selecting an inverter.

5454 of 55 of 55PP.AFD.02.MotorBasicsPP.AFD.02.MotorBasics07/08/200207/08/2002
Motor Basics ExerciseMotor Basics Exercise Answer the following questions using your knowledge and/or the documents from this class.
1.) Write down the formula to calculate synchronous motor speed (please use the simplified form).
Voltage and Full Load Amps (FLA)
120 x f / P
slip (120 x f / P) - slip
NEMA design B
True
2.) To calculate the actual motor speed what has to be included in the above formula?
3.) The majority of electric motors used in general purpose applications in industry today are what NEMA design?
4.) A NEMA design D motor is characterized by very high breakdown torque, and a large percentage of slip ? (True or False)
5.) Name two key pieces of information needed off the motor nameplate when selecting an inverter.
5555 of 55 of 55PP.AFD.02.MotorBasicsPP.AFD.02.MotorBasics07/08/200207/08/2002
Yaskawa Electric America Yaskawa Electric America Technical Training Technical Training Services Services
09/06/200109/06/2001

5656 of 55 of 55PP.AFD.02.MotorBasicsPP.AFD.02.MotorBasics07/08/200207/08/2002
Yaskawa Electric America Technical Training ServicesYaskawa Electric America Technical Training Services
For training information, please:For training information, please:
Call us at 1-800-YASKAWA and select option #6Call us at 1-800-YASKAWA and select option #6
Check out our website at Check out our website at www.yaskawa.com
E-mail us at [email protected] us at [email protected]







